Abstract
Mecanum and omni wheel-based assistive technologies present an alternative to conventional mobility devices for individuals with motor impairments, owing to their omnidirectional movement capabilities and high maneuverability in constrained environments. This systematic review identifies and categorizes the key challenges and emerging trends in the development of such systems. Primary obstacles include limited stability and maneuverability on uneven terrain, high energy consumption, complex control requirements, and elevated production costs. In response, recent studies have introduced several innovative approaches, such as advanced suspension systems to enhance terrain adaptability, modular mechanical designs to reduce manufacturing complexity, energy-efficient motor control strategies such as field-oriented control, AI-driven autonomous navigation, and hands-free user interfaces—including gesture recognition and brain–computer interfaces. By synthesizing findings from 26 peer-reviewed studies, this review outlines current technical limitations, surveys state-of-the-art solutions, and offers strategic recommendations to inform future research in intelligent assistive mobility technologies.
1. Introduction
Assistive technology includes diverse tools and systems aimed at supporting individuals with motor impairments in achieving greater independence. These solutions are crucial for facilitating daily activities and improving mobility. Research in this field is carried out from multiple perspectives, focusing on enhancing accessibility [1] and advancing functionality—particularly through the integration of robotics, artificial intelligence, and sensor-based systems, as demonstrated in smart wheelchair technologies [2].
Assistive mobility devices, especially powered wheelchairs, have progressively evolved to incorporate advanced control mechanisms and mechanical improvements. These developments aim to meet not only basic mobility needs but also the demands of complex environments, ensuring greater safety, adaptability, and user-specific customization [3]. Understanding wheelchair user behavior, anthropometric factors, and ergonomic workspace layouts is essential for maximizing performance, safety, and comfort [4]. Postural support, in particular, significantly affects physical activity and quality of life, underlining the importance of proper seating and positioning systems [5].
Wheelchair users frequently encounter difficulties navigating complex or confined environments, highlighting the need for more maneuverable and adaptive technologies. In response to this demand, researchers and designers have increasingly turned their attention to innovative solutions that improve flexibility and ease of movement.
Among these advancements, the Mecanum wheels—invented by Bengt Ilon in 1973 [6]—and omni wheels stand out as key technologies offering significant improvements in multidirectional mobility. Mecanum wheels have rollers mounted at a 45° angle around a cylindrical base, allowing for omnidirectional motion without changing the platform’s orientation, which is particularly advantageous in confined or dynamic spaces such as urban or healthcare environments. However, their limited grip on uneven terrain necessitates advanced control algorithms. Omni wheels, on the other hand, have rollers positioned perpendicular to the wheel axis, making them easier to control and more affordable. They are ideal for lightweight or educational applications, although they support lower load capacities compared to Mecanum wheels [7] (Figure 1).
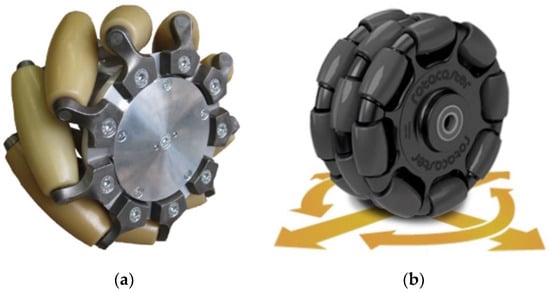
Figure 1.
Design of wheels: (a) Mecanum wheel [8]; (b) omni wheel [9].
Mecanum and omni wheels stand out as innovations that have found extensive applications in mobile robotics. For example, Song and Byun [10] proposed a four-wheeled omnidirectional robot using steerable wheels, while Doroftei and Stirbu [11] focused on kinematic modeling and control strategies for such platforms. Similarly, Han et al. [12] investigated positioning errors in Mecanum-based mobile robots, and Holmberg and Khatib [13] explored holonomic designs for manipulation tasks. Batlle et al. [14] provided a theoretical discussion on holonomy in mobile robots, further supporting the widespread adoption of these wheels in autonomous navigation. These technologies have also proven valuable in industrial applications. For instance, Adascalitei et al. [15] conducted a systematic survey of Mecanum wheel-based robotic systems used in production, logistics, and service automation.
Despite their advantages, Mecanum and omni wheels have notable drawbacks, including vibration, instability, and poor shock absorption on uneven terrain or when crossing thresholds. These issues arise primarily from intermittent roller–ground contact, generating vertical vibrations that compromise stability and comfort. Various studies have explored strategies to mitigate these effects.
Bae et al. [16] optimized wheel design to minimize vertical oscillations by analyzing equivalent stiffness. Bayar et al. [17] examined contact forces on rollers to understand how design influences vibration behavior. Additionally, Candiotti et al. [18] analyzed whole-body vibration in electric wheelchairs when transitioning between surfaces, providing real-world insights into comfort and safety.
Beyond offering enhanced maneuverability, these wheels show promise in addressing several longstanding challenges associated with conventional assistive mobility systems. Conventional electric wheelchairs often struggle on irregular or soft surfaces, and they generally require substantial user effort to reposition or navigate tight spaces. Moreover, typical joystick-based controls may not be accessible to users with severe physical limitations, highlighting the need for multimodal or even hands-free interfaces. The present systematic review addresses these limitations by compiling and synthesizing research on Mecanum and omni wheel-based devices specifically designed for users with motor impairments.
To our knowledge, no prior systematic review has comprehensively synthesized the design, usability, and impact of Mecanum and omni wheel-based assistive mobility devices. This review addresses that gap and aims to provide practical recommendations for researchers, engineers, clinicians, and policymakers.
The key contributions of this review are as follows:
- (1)
- It identifies and categorizes the main mechanical, control-related, and usability challenges associated with Mecanum and omni wheel-based assistive mobility systems;
- (2)
- It highlights recent trends in design and interaction technologies, including AI-driven navigation, multimodal user input, and adaptive mechanical configurations;
- (3)
- It provides strategic recommendations for future research aimed at improving terrain adaptability, user accessibility, and system affordability.
The remainder of this article is structured as follows: Section 2 presents the methodology used to conduct the systematic review. Section 3 summarizes the key findings from 26 included studies. Section 4 discusses the challenges and technological trends emerging from the literature. Section 5 outlines the limitations of the review, and Section 6 offers conclusions and directions for future development in assistive mobility technologies.
2. Materials and Methods
This systematic review was conducted in accordance with the PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) guidelines. The review protocol was not prospectively registered in any public database.
2.1. Eligibility Criteria
Studies were eligible for inclusion if they focused on the development, implementation, or evaluation of mobility devices using Mecanum or omni wheels intended to support individuals with motor impairments. Only peer-reviewed articles written in English, available in full text and published with a valid Digital Object Identifier (DOI) were considered. The exclusion criteria were as follows: (1) no working wheelchair prototype with Mecanum/omni wheels and (2) study does not include people with motor impairments.
2.2. Information Sources and Search Strategy
The literature search was conducted using three databases, namely Scopus, Web of Science, and IEEE Xplore. The search included studies published up to March 2025. The following search query was applied and adapted to the syntax of each database: (Mecanum OR Omni OR wheel) AND wheelchair. No additional filters were applied apart from language (English). The gray literature and unpublished studies were not included in the review.
2.3. Selection Process
All retrieved records were exported from the databases in CSV format and imported into Microsoft Excel 365 (2024). Two reviewers independently screened the titles, abstracts, and keywords of each record. Any disagreements during this stage were resolved through discussion and consensus. Full texts of the studies selected in the initial screening phase were then reviewed in detail. Out of 705 identified records, 35 articles were selected for full-text assessment. Of these, 26 met the eligibility criteria and were included in the review. Articles were excluded for the following reasons, as mentioned in Section 2.1: (1) no working wheelchair prototype with Mecanum/omni wheels [19,20,21,22,23,24] and (2) study does not include people with motor impairments [25,26,27].
2.4. Data Collection and Items
Data were collected manually using a standardized extraction sheet developed in Microsoft Excel 365. Two independent reviewers conducted the data extraction process, and any discrepancies were resolved through discussion to ensure consistency and accuracy. No automation tools were used. Extracted data included bibliographic details, purpose and context of the device, wheel configuration (Mecanum or omni), key mechanical and control elements, motor specifications, and author-stated limitations or recommendations. Missing or unclear information was noted without assumptions. These data formed the basis for the thematic synthesis described in Section 2.6.
2.5. Risk of Bias and Study Quality Considerations
A formal risk of bias assessment was not performed in this review, as the majority of included studies followed engineering design and prototyping methodologies rather than clinical or experimental protocols. These studies typically lacked standardized designs, statistical comparisons, or quantitative outcome measures.
Instead, a descriptive approach was adopted to support comparative interpretation. Relevant indicators were systematically extracted and reported in the data tables in Results, Section 3. These elements offer insight into study robustness but do not constitute a structured assessment of methodological rigor.
This decision reflects the high heterogeneity observed across the included publications, particularly in terms of technical scope, evaluation procedures, and reporting styles. Given the wide variance in design maturity, control strategies, and testing environments, the application of a uniform appraisal metric was deemed impractical. Nevertheless, potential sources of bias—such as small or undefined participant samples, limited or artificial testing conditions, and the absence of blinding during control interface evaluations—were informally noted and considered during synthesis.
It is important to acknowledge that the lack of formal quality appraisal may limit the strength of conclusions and the comparability of findings across studies.
2.6. Synthesis Methods
A qualitative narrative synthesis was conducted to summarize the findings from the included studies. Due to substantial heterogeneity in study designs, device configurations, and reported outcomes, a meta-analysis was not feasible. The synthesis focused on extracting and comparing key characteristics across studies, grouped under the unified thematic categories of device function, mechanical construction, impact on mobility, innovative features, motor types/specifications, and future development recommendations. For consistency, all extracted data were tabulated and analyzed within these categories. The synthesis aimed to identify common design principles, technological challenges, and trends in the development of assistive mobility platforms utilizing Mecanum and omni wheels.
The findings are presented in the Results, Section 3 using comparison tables and thematic summaries, with each subsection focusing on a specific area of design and implementation.
2.7. Reporting
The selection process is documented in the PRISMA flow diagram in Figure 2. The completed PRISMA checklist is provided in the Supplementary Materials.
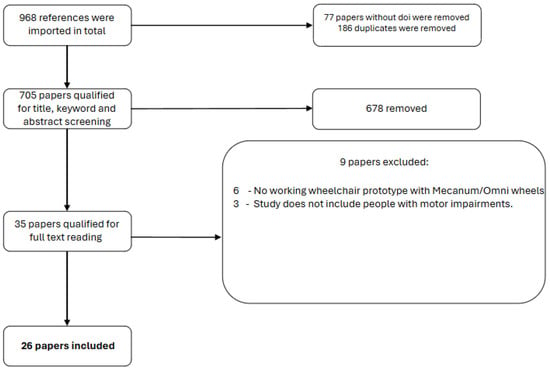
Figure 2.
Prisma workflow.
3. Results
This section presents a thematic overview of research on assistive wheelchairs with Mecanum and omni wheels. Studies are grouped into six key areas, namely stability, control systems, energy efficiency, automation, cost, and validation. The aim is to highlight not only the technical advancements in omnidirectional mobility systems but also their implications for real-world usability and accessibility.
3.1. Stability and Terrain Adaptation
One of the key challenges in applying Mecanum and omni wheels in assistive mobility devices is maintaining stability on uneven ground and overcoming obstacles. Several studies have proposed mechanical and control solutions to improve wheelchair performance on slopes, curbs, and rough terrain. For instance, Sivakanthan et al. [28,29,30] designed a six-wheeled wheelchair (MEBot) with an active seat-leveling system that uses pneumatic actuators to keep the seat level during incline navigation, preventing tipping. MEBot successfully climbs curbs and steep ramps, although full holonomic mobility is limited on very uneven terrain. Another solution by Flores and Arias [31] integrated a spring damper suspension into a four-wheeled Mecanum platform. Vibration was reduced by ~75% and minimized tilting (<0.6°), improving ride comfort. Wada [32] proposed a hybrid 4 × 4 platform with regular rear wheels and omni front wheels to improve grip on slippery or uneven ground. In [33], the author introduced a frame tilt mechanism adjusting the center of gravity while climbing curbs, enhancing stability. Zhewen et al. [34] emphasized the role of independent suspension in Mecanum-based wheelchairs to improve smoothness and reduce vibrations. Kawata et al. [35] modified a six-wheeled electric wheelchair frame to climb ~96 mm curbs without increasing wheel size. The data were collected and summarized in Table 1.

Table 1.
Overview of solutions addressing stability and terrain adaptation.
3.2. Control Systems and User Interfaces
Another important aspect is the control architecture and user interfaces, which determine how effectively and intuitively the user (or caregiver) can operate the wheelchair. In the literature, various alternative control methods have been proposed for users who are unable to handle a traditional joystick. For example, Kundu et al. [36] developed a hand gesture control system using IMU and EMG sensors. This system enables contactless operation and achieves over 90% gesture recognition accuracy, indicating it is a reliable and intuitive solution. Another approach involves the use of a brain–computer interface (BCI). Yu et al. [37] designed a system controlled solely through EEG signals. This non-invasive BCI allows individuals with complete quadriplegia to control a wheelchair independently. Improvements have also been made to conventional controllers—Isah et al. [38] introduced a web-based Wi-Fi interface, allowing caregivers to control and monitor the wheelchair remotely, including built-in obstacle avoidance. Another key goal is to improve precision and motion dynamics. Yadav et al. [39] implemented a sliding mode controller (SMC) to compensate for wheel slippage, significantly enhancing path-tracking accuracy. Chotikunnan et al. [40] applied a classic PID controller tuned via the Cohen–Coon method, achieving very stable omnidirectional motion (quick speed adjustment without oscillation). The data were collected and summarized in Table 2.
Table 2.
Overview of control systems and user interfaces.
3.3. Energy Efficiency and Drive Systems
Another challenge is the efficiency of the drive system and power consumption in Mecanum/omni-based wheelchairs. Multidirectional drive systems often exhibit higher energy losses (e.g., due to slippage) and complex motor control requirements. In response, Lee et al. [41] implemented field-oriented control (FOC) in a detachable power module for a manual wheelchair. This method increased motor efficiency and provided consistent torque at low speeds, resulting in smoother driving and reduced battery load. Li et al. [42] used advanced kinematic simulations of a Mecanum platform (via RecurDyn) to optimize wheel configuration and control logic. Their results emphasized that both mechanical layout and power distribution algorithms are critical for smooth and energy-efficient omnidirectional movement. Real-world prototypes have also addressed powertrain concerns—Thongpance et al. [43] built a functional Mecanum-wheel using standard components such as 24 V DC motors and microcontrollers. Recommendations focus on enhancing device functionality, including safety (with additional sensors), efficiency (battery improvements), and comfort (speed control and smooth operation). Additionally, machine learning and field testing are emphasized for continuous improvement and real-world validation. The data were collected and summarized in Table 3.
Table 3.
Overview of energy efficiency and drive system solutions.
3.4. Automation and System Intelligence
Modern wheelchairs with Mecanum or omni wheels are increasingly equipped with autonomous features and intelligent systems to reduce the user’s cognitive load and improve independence. A growing trend is the automation of specific tasks—Zhu et al. [44] developed a system for automatic docking with a care bed using spatial mapping (grid-based map) and LiDAR (Hokuyo Automatic Co., Osaka City, Japan), sensors. It simplifies the transfer process and reduces physical strain for caregivers. In the care context, assistive transfer robots have also emerged. Tatemoto et al. [45] designed a Lateral Transfer Assist Robot (LTAR), which automates side transfers using synchronized seat adjustments and memorized height positions. Similarly, Sang et al. [46] developed a hybrid wheelchair–stretcher device that can transform modes and auto-adjust height for seamless transfer. Automation also includes self-driving features—Hsu et al. [47] introduced an intelligent wheelchair (iRW) with multiple operating modes, including semi-autonomous indoor navigation using QR markers and remote caregiver control. Catalan et al. [48] integrated SLAM-based autonomous driving and multimodal interfaces, such as BCI and eye tracking, allowing even users with severe disabilities to command the system with minimal effort. Earlier work by Borgolte et al. [49] has already explored semi-autonomous path playback, which can memorize and retrace routes while avoiding collisions. Recent research expands on these concepts by incorporating AI algorithms. Liu et al. [50], for instance, combined a BCI with autonomous goal-directed navigation, where users selected destinations via EEG and the system planned and executed the route—halving travel time compared to manual control. The data were collected and summarized in Table 4.
Table 4.
Overview of automation and intelligent system solutions.
3.5. Cost and Accessibility
Multiple studies stress the importance of affordability as a prerequisite for real-world deployment, particularly in home environments. A widely cited strategy is the use of off-the-shelf components. Al-Ajmi et al. [51] demonstrated that a fully operational holonomic wheelchair could be constructed using a standard frame, hobbyist Mecanum wheels, Arduino controllers, and a Bluetooth interface, significantly reducing the production cost without compromising core functions. Modularity was also applied by Borgolte et al. [49], who developed a semi-autonomous platform with swappable control components and customizable functionality, promoting reusability and scalable production. Another cost-saving direction involves alternative materials and manufacturing methods. Catalan et al. argued that 3D printing and lightweight composite plastics can substitute expensive metal frames, enabling more accessible production pipelines for custom or small-batch builds [48]. In a similar spirit, Thongpance et al. [43] presented a wheelchair design that met standards for safety and reliability using inexpensive Arduino boards, steel tubing, and modular Mecanum drive units, proving that regulation compliance is feasible within a budget-conscious framework.
Accessibility is also enhanced by using consumer-grade devices for interaction and control. Smartphones or tablets serve as intuitive and widely available user interfaces, eliminating the need for proprietary systems that would otherwise increase costs [51]. Open-source software and community-driven platforms enable further democratization, particularly within maker and rehabilitation engineering communities. Furthermore, researchers have emphasized that cost-efficiency must not sacrifice usability; for instance, Liu et al. combined low-power motors with a BCI control system and visual navigation, delivering impressive autonomy results while keeping hardware complexity moderate [50]. The data were collected and summarized in Table 5.
Table 5.
Low-cost and accessibility-oriented wheelchair solutions.
3.6. Validation and Real-World Testing
Many described systems were evaluated only under controlled conditions—on flat surfaces or using mock-up obstacles. Wada et al. [32] emphasized the need to develop standardized testing procedures for Mecanum-based wheelchairs, especially for outdoor terrain, to assess performance across different surfaces and obstacles. Catalan et al. [48] similarly noted that real-world deployment—including integration with home environments and user acceptance—requires larger-scale studies. Only a few projects have conducted field testing. Matsuo [52] evaluated a compact sports wheelchair in tight indoor spaces and during dynamic maneuvers, identifying the need to tune speed and stability under match-like conditions. Kang et al. [53] demonstrated their holonomic wheelchair in a factory setting, showing that it could navigate narrow hallways and transport cargo, although they suggested adding autonomous navigation features for better efficiency. Importantly, research on interfaces like BCIs [37] and AR [50] included real users in home trials, providing valuable insights into usability. The data were collected and summarized in Table 6.
Table 6.
Projects involving real-world testing or addressing validation needs.
4. Discussion
This review identified six key challenges that must be addressed to maximize the usability and efficiency of Mecanum and omni wheel assistive devices. While the selected studies provide valuable insights into the mechanical design, control strategies, and energy management of these systems, real-world implementation remains challenging. Below, we discuss each challenge—terrain adaptation, control systems, energy efficiency, automation, validation, and cost/design—and outline both the progress made and the remaining gaps.
Stability and maneuverability on uneven terrain remain significant issues for current systems. Some studies—as discussed in Section 3.1—have introduced innovative curb-climbing and seat-leveling mechanisms [29,33] that improve performance on specific obstacles, but these designs still struggle to consistently handle diverse surface conditions. Several designs work reliably indoors yet falter on rough outdoor terrain; indeed, even systems with active leveling or hybrid wheel configurations reported failure rates above 20% in obstacle-rich environments. This gap between lab optimization and real-world reliability indicates that further refinement is needed to ensure consistent performance across various surfaces. Researchers have responded by integrating advanced suspension systems and novel wheel configurations. For example, adding suspension to each wheel significantly improves stability and comfort when traversing uneven terrain [26,27]. Adaptive suspension can dynamically adjust wheel height or damping to keep all wheels in contact and to reduce vibrations transmitted to the user. Others have combined different wheel types to enhance traction, such as a four-wheel-drive hybrid that pairs conventional tires with omni wheels; this design allows a vehicle to climb small steps while maintaining lateral agility on irregular surfaces. However, truly seamless omnidirectional mobility over very rough terrain has not yet been achieved, suggesting that more radical innovations—like novel wheel geometries or smart suspensions that actively adapt to surface irregularities—will be required to fully address this challenge [45].
Beyond the wheels and suspension, the control architecture and user interface determine how effectively and intuitively a person with motor impairments can operate an omnidirectional wheelchair. A key trend is the development of multimodal control schemes that move beyond the traditional joystick, allowing users with a wide range of abilities to command their devices. Detailed analyses in the Results indicate that despite high reliability and usability, cognitive load remains a challenge, particularly for BCI-based systems. While Section 3.2 outlined the feasibility of gesture-based [36], web-based [38], and EEG-based interfaces [37], few addressed the learning curve or long-term usability. Furthermore, control architectures must balance autonomy and user intent: systems such as CVAR-BCW [50] exemplify this by enabling shared control, where the wheelchair manages navigation details while the user makes high-level decisions. Such hybrid control models appear promising but require further refinement in terms of latency, safety, and adaptability to diverse user needs.
In parallel with such novel inputs, researchers are refining traditional controls to make mobility more user-friendly. Improved joystick interfaces and smarter controllers have been introduced to simplify maneuvering in complex environments. A previously described system (Section 3.4) incorporated an intuitive joystick with preset driving modes and memory functions for seat positioning [53]. Even small usability enhancements—like an ergonomic joystick design or automated alignment features—can reduce the cognitive and physical strain on users and caregivers. Additionally, remote control and semi-autonomous functionalities are being tested [38].
Across the literature, there is a strong emphasis on making control systems both intelligent—capable of automatically managing low-level mechanical complexity—and intuitive, allowing users to interact using whichever input method is most accessible to them whether through subtle hand gestures, voice commands, or brain–computer interfaces. These advancements in control architecture and user interfaces significantly improve accessibility, enabling a broader spectrum of individuals—including those with severe motor impairments—to benefit from Mecanum and omni wheel-based mobility technologies.
Energy efficiency is a technical constraint with major practical implications. Mecanum and omni systems require multi-motor configurations that increase energy consumption. As previously noted in Section 3.3, solutions like field-oriented control (FOC) [41] and power distribution optimization [43] have shown promising results in controlled settings. However, many studies neglected to assess energy consumption under variable terrain and usage scenarios. In future developments, efficiency must be considered not only at the motor level but also within the context of integrated systems, accounting for payload, control mode, and user behavior. Battery life, a limiting factor in telemedical or autonomous setups, must be extended through hardware optimization and software-level management of load distribution.
The increasing presence of automation and intelligent systems is a key trend across reviewed studies. Building on recent implementations (Section 3.4), technologies such as SLAM [48], sensor fusion, and AI-driven decision-making are enabling wheelchairs to navigate autonomously, assist with transfers [46], and adapt to user intent. AI-driven autonomy can serve as a low-level navigation assistant supporting routine tasks, enabling users to focus on high-level decision-making while reducing cognitive and operational effort. These applications illustrate how AI can enhance real-time decision-making and personalize the driving experience for users with profound impairments. However, increasing autonomy also raises new challenges. For example, ensuring that AI-driven decisions are transparent and fail-safe in unpredictable environments is crucial for user trust and safety, yet this aspect has not been deeply addressed in the current literature. Developing explainable AI techniques (as described by Liao et al. [54]) and robust fallback control mechanisms in smart wheelchairs can be a promising direction to tackle this concern. In the long run, integrating more advanced sensors (e.g., LiDAR or depth cameras) and machine learning algorithms could allow wheelchairs to autonomously avoid obstacles, map optimal paths, and even learn from the user’s behavior to assist in navigation. Importantly, such autonomy features should augment the user’s abilities without overriding the user’s intent. The goal is for the AI to handle low-level details (like maintaining a safe distance from walls or adjusting speed for bumps) so that it handles operational complexity, reducing user burden while preserving user control over strategic decisions.
Despite growing functionality, high cost and design trade-offs—previously reviewed in Section 3.5—continue to hinder a widespread adoption of omnidirectional wheelchairs. Few prototypes offer verticalization, as most prioritize compactness and maneuverability [36,48,49]. Standing mechanisms, while valuable for rehabilitation, increase weight and complexity, potentially limiting usability. Balancing sensor performance with affordability also poses challenges—early systems often relied on expensive arrays, but recent work explores lower-cost solutions like depth cameras [2]. Moreover, ergonomic and user-centered aspects remain underdeveloped. Many designs focus on technical data, overlooking comfort, adjustability, and ease of use. As Desai et al. [2] note, end-users are rarely involved early in development, leading to innovations that may not align with real needs. Future efforts must emphasize human-centered design, ensuring that advanced features genuinely enhance everyday experience through comfortable seating, intuitive controls, and user-informed design choices. Collaboration between engineers, clinicians, and users will be key to achieving this.
Validation and real-world testing remain underdeveloped in this field. While some studies included pilot testing in homes or public spaces [50,52,53], the majority relied on controlled environments with simplified obstacles. This limits generalizability and risks overlooking key factors such as user fatigue, caregiver support, environmental variability, or unstructured indoor layouts. Although Section 3.6 identifies this gap, its broader implications merit further attention. Devices that function well in standardized lab settings may underperform in real-world scenarios—on uneven terrain, in crowded spaces, or under changing weather conditions—where unpredictability directly affects usability, safety, and adoption.
Another limitation is the narrow user base involved in many studies, typically young and able-bodied individuals. This reduces the relevance of findings for elderly users or those with cognitive or motor impairments. Inclusive testing is essential to capture diverse needs and challenges, such as limited dexterity or increased cognitive load.
To overcome these shortcomings, future research should implement standardized field testing protocols and participatory evaluation strategies involving real users from early development through post-deployment. Studies like those by Sivakanthan et al. [28] and Liu et al. [50] show that combining technical assessment with lived experience yields more actionable insights.
Furthermore, aligning specific engineering challenges with their testing methods—for example, verifying traction solutions on real slopes or validating energy efficiency across different user profiles—can improve transparency and guide future design decisions.
The lack of unified evaluation frameworks limits cross-study comparisons and benchmarking [55]. Establishing shared criteria and fostering collaboration among engineers, clinicians, and users will be key to refining omnidirectional assistive technologies for real-life use. Only through comprehensive validation—technical and experiential—can these innovations deliver consistent, inclusive, and safe mobility support.
More generally, ergonomic and user-centered design considerations have been underexplored in current research. Most prototypes focus on technical performance (maneuverability, speed, control accuracy) and pay less attention to factors like seating comfort, adjustability, and ease of transfers. Going forward, greater emphasis on human-centered design is needed to ensure that omnidirectional movement and other high-tech features genuinely improve user experience. This means designing seating and support that remain comfortable during lateral movements, ensuring that control interfaces (joystick, gesture sensor, BCIs, etc.) do not cause fatigue or frustration, making the device as approachable as a conventional wheelchair in terms of training and maintenance. Achieving these goals will require close collaboration among engineers, clinicians, and end-users from the earliest design stages.
Cost and accessibility considerations are critical for real-world adoption. Although the use of off-the-shelf components, modular architectures, and open-source control systems can reduce initial development costs [43,48,51], these strategies are not sufficient on their own. Many prototypes still rely on custom-built frames or expensive sensors, which could limit scalability. Beyond using low-cost parts, several studies advocate for modular architectures, which allow for incremental upgrades and maintenance without requiring a full redesign. This approach enhances cost-efficiency across the product life cycle and facilitates adaptation to individual user needs [48]. Future work should focus on achieving cost-efficiency without compromising reliability or usability.
A promising direction is transforming omnidirectional wheelchairs into multifunctional assistive platforms through technology integration. Researchers have explored adding robotic arms for task assistance and embedding IoT-based health monitoring for real-time vital tracking and emergency alerts [56]. These “telehealth-enabled” systems could enhance user independence and safety by merging mobility with healthcare support. However, challenges remain, including high power demands from continuous monitoring and concerns around data security and privacy [57]. Addressing these issues will be key as future designs increasingly adopt modular health and communication features, aligning with the broader shift toward IoT-driven assistive technologies.
Mathematical and Computational Challenges in Assistive Mobility Systems
In addition to mechanical and usability considerations, the development of Mecanum and omni wheel-based assistive platforms presents a range of mathematical and computational challenges that are often underexplored in the reviewed literature. As highlighted in the Results, Section 3 [39,41,42], several studies applied advanced control strategies—including sliding mode control (SMC), field-oriented control (FOC), and kinematic simulations—but offered limited detail regarding their mathematical formulation, implementation complexity, or performance trade-offs. For instance, FOC requires real-time transformations (e.g., Clarke and Park) to manage motor torque and flux independently, which can impose strict timing and processing constraints on embedded systems [41]. This is consistent with findings by Ghanayem et al. [58], who demonstrated how decoupled speed and flux control in FOC architectures enhances fault tolerance but also increases control complexity, requiring careful parameter tuning and stability verification.
Similarly, SMC and other nonlinear control methods demand accurate modeling of system dynamics and often involve discontinuous control laws, which may introduce numerical instabilities if not properly tuned [39]. Motion planning and system modeling also pose significant analytical demands. Studies like [42] used multibody simulation tools to refine drive configurations, emphasizing that kinematic optimization is crucial for maintaining motion fidelity—especially in environments with constrained space or variable friction.
In a broader modeling context, Li et al. [59] proposed a modified inverse kinematics model for systems composed of multiple Mecanum platforms, incorporating slip compensation matrices to enhance positioning accuracy. Their work highlights the importance of precise velocity mapping and simulation-based optimization for robust omnidirectional mobility.
The integration of biosignal-driven user interfaces introduces additional complexity. Real-time classification of EMG, IMU, or EEG signals—such as those used in gesture-based [36] or brain–computer interface (BCI) control [37,50]—requires robust signal preprocessing, feature extraction, and machine learning pipelines. A recent study by Welihinda et al. [60] developed a multimodal human–machine interface for assistive wheelchairs using EEG and EMG inputs, combining signal processing algorithms with adaptive navigation logic. Their results show promising control accuracy but also reveal latency and stability challenges during real-time operation.
However, only a few studies have provided full algorithmic details or reported accuracy, latency, and reliability under varied conditions. To advance this field, future research should more explicitly document the mathematical models, control algorithms, and signal processing architectures employed in assistive mobility systems. Key elements such as computational load, response time, numerical stability, and robustness should be quantitatively evaluated.
5. Limitations of the Review Process
This review focused on peer-reviewed studies describing implemented Mecanum or omni wheel-based mobility systems. As a result, conceptual or theoretical designs without working prototypes were excluded, which may limit the general scope of technological exploration.
Additionally, most of the included studies were evaluated under controlled laboratory conditions, using predefined metrics such as vibration amplitude [31], tilt angle [28], or energy consumption [43]. While these benchmarks offer technical insights, they may not reflect real-world usage scenarios involving varied terrain, user fatigue, or caregiver interaction.
Participant demographics were also often underreported or narrowly defined, limiting insight into how these systems perform across diverse user groups, especially those with cognitive or severe physical impairments.
Another constraint was the absence of a universal framework for assessing study quality. Although we applied a qualitative evaluation based on implementation level and clarity of reporting, no standardized risk-of-bias tool for engineering studies was used. This may impact the reproducibility and comparability of findings.
Finally, the heterogeneity of reporting styles, performance metrics, and testing protocols made direct cross-study comparison challenging. Developing shared evaluation standards and reporting guidelines for assistive mobility technologies would improve future review quality and facilitate benchmarking across platforms.
6. Conclusions
This review has demonstrated that Mecanum and omni wheel technologies hold significant promise for improving mobility and independence in individuals with motor impairments, particularly through enhanced indoor maneuverability, multimodal control strategies, and the integration of intelligent automation. However, despite rapid technological advancements, their widespread adoption remains limited due to persistent challenges in several areas.
Among the most pressing issues are inadequate performance on uneven or outdoor terrain, the lack of standardized evaluation protocols, and the limited scalability of current prototypes. Additionally, a considerable gap persists between proof-of-concept innovations and fully validated user-ready solutions. This gap is especially evident in the limited field testing and real-world validation reported in many studies. Furthermore, while several projects integrate sophisticated control systems—such as FOC or brain–computer interfaces—the mathematical modeling, algorithmic transparency, and robustness of these implementations are often underreported, making cross-comparison and replication difficult.
To close these gaps, future research should prioritize the following:
- Development of adaptive terrain-handling mechanisms suitable for unstructured and outdoor environments;
- Design of human-centered control systems that minimize cognitive and physical demands across a wide range of user abilities;
- Implementation of scalable and modular system architectures to enhance affordability and long-term serviceability;
- Integration of telehealth and IoT functionalities to support continuous care, monitoring, and communication;
- Application of ergonomic design principles and computational optimization to balance performance with comfort and usability;
- Greater engagement in participatory testing and co-design processes that involve end-users from the earliest development phases;
- Systematic analysis and documentation of the mathematical models and control algorithms to improve comparability, reproducibility, and performance evaluation.
Ultimately, translating the potential of Mecanum and omni wheel systems into inclusive, practical mobility solutions will require interdisciplinary collaboration between engineers, clinicians, and users. The goal should not only be technological innovation but also long-term functionality, accessibility, and real-world effectiveness. This review provides a structured roadmap to guide such efforts and underscores the need for assistive mobility systems that are not only intelligent and adaptable but also equitable and user-driven.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/app15094773/s1.
Author Contributions
Conceptualization, M.B., S.S., M.C. and R.K.; methodology, S.S.; formal analysis, M.B. and I.Ł.; investigation, M.B., I.Ł. and S.S.; resources, I.Ł. and S.S.; data curation, I.Ł. and S.S.; writing—original draft preparation, M.B.; writing—review and editing, M.B., I.Ł., S.S. and M.C.; visualization, M.B. and I.Ł.; supervision, M.B. and R.K.; project administration, M.B. and R.K.; funding acquisition, M.B., S.S., M.C. and R.K. All authors have read and agreed to the published version of the manuscript.
Funding
The APC was funded by 1.2 Research, Development, and Innovation in Enterprises under the Regional Operational Program of the Silesian Voivodeship for 2014–2020, co-financed by the European Regional Development Fund. Project name “Mobilne mechatroniczne urządzenie z funkcją pionizacji dla osób niepełnosprawnych”, UDA-RPSL.01.02.00-24-00AA/19.
Data Availability Statement
All data supporting the findings of this study are available within the article and its Supplementary Materials. In particular, a supplementary comparison table has been added to provide standardized technical metrics for all included studies. This table includes the following parameters: wheel type, vibration reduction (%), obstacle climbing height (mm), battery type, motor type/power, and cost strategy. Only explicitly reported values are included; missing data are marked as “not reported”. This review was not prospectively registered in a database such as PROSPERO.
Conflicts of Interest
Author Rafał Kowolik was employed by the company PHU Technomex Sp z o.o. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Tangcharoensathien, V.; Witthayapipopsakul, W.; Viriyathorn, S.; Patcharanarumol, W. Improving Access to Assistive Technologies: Challenges and Solutions in Low- and Middle-Income Countries. WHO South-East Asia J. Public Health 2018, 7, 84–89. [Google Scholar] [CrossRef]
- Desai, S.; Mantha, S.; Phalle, V. Advances in Smart Wheelchair Technology. In Proceedings of the 2017 International Conference on Nascent Technologies in Engineering (ICNTE), Vashi, India, 27–28 January 2017. [Google Scholar]
- WHO. Global Report on Assistive Devices; WHO: Geneva, Switzerland, 2022; ISBN 9789240049451. [Google Scholar]
- Mistarihi, M.Z. A Data Set on Anthropometric Measurements and Degree of Discomfort of Physically Disabled Workers for Ergonomic Requirements in Work Space Design. Data Br. 2020, 30, 105420. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Kazemi, A.; Ebrahimi, A. Review Paper: Wheelchair Design and Its Influence on Physical Activity and Quality of Life Among Disabled Individuals. Iran. Rehabil. J. 2016, 14, 85–92. [Google Scholar] [CrossRef]
- Ferrière, L.; Fisette, P.; Raucent, B.; Vaneghem, B. Contribution to the Modelling of a Mobile Robot Equipped with Universal Wheels. IFAC Proc. Vol. 1997, 30, 675–682. [Google Scholar] [CrossRef]
- Gfrerrer, A. Geometry and Kinematics of the Mecanum Wheel. Comput. Aided Geom. Des. 2008, 25, 784–791. [Google Scholar] [CrossRef]
- Mecanum Wheel. Available online: https://commons.wikimedia.org/wiki/File:Meacnum_Rad.png (accessed on 14 March 2025).
- Omniwheel Wikimedia. Available online: https://en.wikipedia.org/wiki/File:Triple_Rotacaster_commercial_industrial_omni_wheel.jpg (accessed on 14 March 2025).
- Song, J.-B.; Byun, K.-S. Design and Control of a Four-Wheeled Omnidirectional Mobile Robot with Steerable Omnidirectional Wheels. J. Robot. Syst. 2004, 21, 193–208. [Google Scholar] [CrossRef]
- Doroftei, I.; Stirbu, B. Design, Modeling and Control of an Omni-Directional Mobile Robot. In Proceedings of the Robotics and Automation Systems, Orlando, FL, USA, 12–14 July 2010; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2010; Volume 166, pp. 173–178. [Google Scholar]
- Han, K.-L.; Kim, H.; Lee, J.S. The Sources of Position Errors of Omni-Directional Mobile Robot with Mecanum Wheel. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 581–586. [Google Scholar]
- Holmberg, R.; Khatib, O. Development and Control of a Holonomic Mobile Robot for Mobile Manipulation Tasks. Int. J. Rob. Res. 2000, 19, 1066–1074. [Google Scholar] [CrossRef]
- Batlle, J.A.; Barjau, A. Holonomy in Mobile Robots. Rob. Auton. Syst. 2009, 57, 433–440. [Google Scholar] [CrossRef]
- Adascalitei, F.; Asachi, G.; Adăscăliţei, F. Practical Applications for Mobile Robots Based on Mecanum Wheels-A Systematic Survey The Romanian Review Precision Mechanics. Opt. Mechatron. 2011, 40, 21–29. [Google Scholar]
- Bae, J.J.; Kang, N. Design Optimization of a Mecanum Wheel to Reduce Vertical Vibrations by the Consideration of Equivalent Stiffness. Shock Vib. 2016, 2016, 5892784. [Google Scholar] [CrossRef]
- Bayar, G.; Ozturk, S. Investigation of The Effects of Contact Forces Acting on Rollers of a Mecanum Wheeled Robot. Mechatronics 2020, 72, 102467. [Google Scholar] [CrossRef]
- Candiotti, J.L.; Neti, A.; Sivakanthan, S.; Cooper, R.A. Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions. Vibration 2022, 5, 98–109. [Google Scholar] [CrossRef]
- Ferrière, L.; Campion, G.; Raucent, B. ROLLMOBS, a New Drive System for Omnimobile Robots. Robotica 2001, 19, 1–9. [Google Scholar] [CrossRef]
- Watanabe, Y.; Shigekane, A.; Matsumoto, K.; Kawamura, A.; Kurazume, R. Development of Mobile Sensor Terminals “Portable Go” for Navigation in Informationally Structured and Unstructured Environments. ROBOMECH J. 2019, 6, 6. [Google Scholar] [CrossRef]
- Kato, H.; Komori, M.; Terakawa, T. Human-Powered Vehicle Capable of Movement in the Longitudinal and Lateral Directions. J. Adv. Mech. Des. Syst. Manuf. 2020, 14, JAMDSM0082. [Google Scholar] [CrossRef]
- Dai, S.; Liu, R.; Zhang, H. Vibration Characteristic Analysis of Electric Wheelchair-Pavement Coupling System Based on Mecanum Wheel. J. Vib. Shock 2020, 39, 245–252. [Google Scholar]
- Satoh, Y.; Sakaue, K. A Secure and Reliable next Generation Mobility. Synthesiology 2009, 2, 107–120. [Google Scholar] [CrossRef]
- Satoh, Y.; Sakaue, K. An Omnidirectional Stereo Vision-Based Smart Wheelchair. Eurasip J. Image Video Process. 2007, 2007, 87646. [Google Scholar] [CrossRef]
- Bühler, C.; Hoelper, R.; Hoyer, H.; Humann, W. Autonomous Robot Technology for Advanced Wheelchair and Robotic Aids for People with Disabilities. Rob. Auton. Syst. 1995, 14, 213–222. [Google Scholar] [CrossRef]
- Seo, J.; Kim, C.W. 3D Depth Camera-Based Obstacle Detection in the Active Safety System of an Electric Wheelchair. J. Inst. Control Robot. Syst. 2016, 22, 552–556. [Google Scholar] [CrossRef]
- Faria, B.M.; Reis, L.P.; Lau, N. Adapted Control Methods for Cerebral Palsy Users of an Intelligent Wheelchair. J. Intell. Robot. Syst. 2015, 77, 299–312. [Google Scholar] [CrossRef]
- Sivakanthan, S.; Candiotti, J.L.; Sundaram, S.A.; Battles, C.; Daveler, B.J.; Chung, C.S.; Grindle, G.G.; Cooper, R.; Dicianno, B.E.; Cooper, R.A. Usability Evaluation of Attitude Control for a Robotic Wheelchair for Tip Mitigation in Outdoor Environments. Med. Eng. Phys. 2020, 82, 86–96. [Google Scholar] [CrossRef]
- Candiotti, J.; Daveler, B.; Sivakanthan, S.; Grindle, G.; Cooper, R.; Cooper, R. Curb Negotiation with Dynamic Human-Robotic Wheelchair Collaboration. IEEE Trans. Hum.-Mach. Syst. 2022, 52, 149–155. [Google Scholar] [CrossRef] [PubMed]
- Candiotti, J.; Andrea Sundaram, S.; Daveler, B.; Gebrosky, B.; Grindle, G.; Wang, H.; Cooper, R.A. Kinematics and Stability Analysis of a Novel Power Wheelchair When Traversing Architectural Barriers. Top. Spinal Cord Inj. Rehabil. 2017, 23, 110–119. [Google Scholar] [CrossRef] [PubMed]
- Flores, P.A.; Arias, J.L. Omnidirectional Wheelchair with Suspension System for Mobility on Uneven Terrains. Eng. Proc. 2025, 83, 25. [Google Scholar] [CrossRef]
- Wada, M. Omnidirectional and Holonomic Mobile Platform with Four-Wheel-Drive Mechanism for Wheelchairs. J. Robot. Mechatron. 2007, 19, 264–271. [Google Scholar] [CrossRef]
- Wada, M. A 4WD Omnidirectional Wheelchair with Enhanced Step Climbing Capability. J. Robot. Mechatron. 2008, 20, 846–853. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, H.; Wu, C.; Huang, P.; Wu, J. A Comprehensive Study on Mecanum Wheel-Based Mobility and Suspension Solutions for Intelligent Nursing Wheelchairs. Sci. Rep. 2024, 14, 20644. [Google Scholar] [CrossRef]
- Kawata, T.; Sato, F.; Tsuji, S.; Suzuki, T.; Suzuki, T.; Kokuryu, T. A Study on the Running of a Joystick-Type Six-Wheeled Electric Wheelchair When Curb Climbing. Machines 2024, 12, 568. [Google Scholar] [CrossRef]
- Kundu, A.S.; Mazumder, O.; Lenka, P.K.; Bhaumik, S. Hand Gesture Recognition Based Omnidirectional Wheelchair Control Using IMU and EMG Sensors. J. Intell. Robot. Syst. Theory Appl. 2018, 91, 529–541. [Google Scholar] [CrossRef]
- Yu, Y.; Zhou, Z.; Liu, Y.; Jiang, J.; Yin, E.; Zhang, N.; Wang, Z.; Liu, Y.; Wu, X.; Hu, D. Self-Paced Operation of a Wheelchair Based on a Hybrid Brain-Computer Interface Combining Motor Imagery and P300 Potential. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2516–2526. [Google Scholar] [CrossRef] [PubMed]
- Isah, R.O.; Olaniyi, O.M.; Kolo, J.G.; Babatunde, D.Z. A Smart Omnidirectional Controlled Wheelchair. J. Eng. Sci. 2020, 27, 88–102. [Google Scholar] [CrossRef]
- Yadav, P.S.; Agrawal, V.; Mohanta, J.C.; Faiyaz Ahmed, M.D. A Robust Sliding Mode Control of Mecanum Wheel-Chair for Trajectory Tracking. Mater. Today Proc. 2022, 56, 623–630. [Google Scholar] [CrossRef]
- Chotikunnan, R.; Chotikunnan, P.; Thongpance, N.; Puttasakul, T.; Pititheeraphab, Y.; Sangworasil, M. Application of PID Control System in Mecanum Wheelchair. Int. J. Membr. Sci. Technol. 2023, 10, 3519–3529. [Google Scholar] [CrossRef]
- Lee, D.; Kim, S. Design and Control of a Novel Detachable Driving Module for Electrification of Manual Wheelchairs. IEEE Access 2023, 11, 10169–10179. [Google Scholar] [CrossRef]
- Li, Y.; Dai, S.; Zheng, Y.; Tian, F.; Yan, X. Modeling and Kinematics Simulation of a Mecanum Wheel Platform in RecurDyn. J. Robot. 2018, 2018, 9373580. [Google Scholar] [CrossRef]
- Thongpance, N.; Chotikunnan, P. Design and Construction of Electric Wheelchair with Mecanum Wheel. J. Robot. Control 2023, 4, 71–82. [Google Scholar] [CrossRef]
- Zhu, Y.; Meng, Q.; Yu, H.; Wang, H.; Hu, J.; Li, P.; Hu, B. Wheelchair Automatic Docking Method for Body-Separated Nursing Bed Based on Grid Map. IEEE Access 2021, 9, 79549–79561. [Google Scholar] [CrossRef]
- Tatemoto, T.; Saitoh, E.; Tanabe, S.; Koyama, S.; Kumazawa, N.; Furuzawa, S.; Kato, T.; Yoshimuta, H.; Torii, K.; Kiyono, K.; et al. Lateral Transfer Assist Robot (LTAR): Development of a Proof-of-Concept Prototype. Technol. Health Care 2020, 28, 175–183. [Google Scholar] [CrossRef]
- Sang, L.; Yamamura, M.; Dong, F.; Gan, Z.; Fu, J.; Wang, H.; Tian, Y. Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot. Appl. Sci. 2020, 10, 264. [Google Scholar] [CrossRef]
- Hsu, P.E.; Hsu, Y.L.; Chang, K.W.; Geiser, C. Mobility Assistance Design of the Intelligent Robotic Wheelchair. Int. J. Adv. Robot. Syst. 2012, 9, 244. [Google Scholar] [CrossRef]
- Catalan, J.M.; Blanco, A.; Bertomeu-Motos, A.; Garcia-Perez, J.V.; Almonacid, M.; Puerto, R.; Garcia-Aracil, N. A Modular Mobile Robotic Platform to Assist People with Different Degrees of Disability. Appl. Sci. 2021, 11, 7130. [Google Scholar] [CrossRef]
- Borgolte, U.; Hoyer, H.; Bühler, C.; Heck, H.; Hoelper, R. Architectural Concepts of a Semi-Autonomous Wheelchair; Springer: Berlin/Heidelberg, Germany, 1998; Volume 22. [Google Scholar]
- Liu, K.; Yu, Y.; Liu, Y.; Tang, J.; Liang, X.; Chu, X.; Zhou, Z. A Novel Brain-Controlled Wheelchair Combined with Computer Vision and Augmented Reality. Biomed. Eng. Online 2022, 21, 50. [Google Scholar] [CrossRef] [PubMed]
- Al-Ajmi, M.H.; Al-Osaimi, M.Z.; Al-Osaimi, T.A.; Al-Kandari, A.S.; Al-Rashed, M.S.; Said, S.; Karar, A.S.; Alkork, S. Design and Implementation of a Smart Electric Omnidirectional Wheelchair Using Consumer Off-the-Shelf Components. In Proceedings of the 2023 5th International Conference on Bio-Engineering for Smart Technologies (BioSMART), Paris, France, 7–9 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Matsuo, K. Implementation and Experimental Evaluation of an Omnidirectional Wheelchair for Sports and Moving in Rooms with Narrow Spaces. Int. J. Space-Based Situated Comput. 2017, 7, 1. [Google Scholar] [CrossRef]
- Kang, J.W.; Kim, B.S.; Chung, M.J. Development of Omni-Directional Mobile Robots with Mecanum Wheels Assisting the Disabled in a Factory Environment. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 14–17 October 2008; pp. 2070–2075. [Google Scholar] [CrossRef]
- Liao, V.; Varshney, K. Human-Centered Explainable AI (XAI): From Algorithms to User Experiences. arXiv 2021, arXiv:2110.10790. [Google Scholar]
- Sivakanthan, S.; Candiotti, J.L.; Sundaram, A.S.; Duvall, J.A.; Sergeant, J.J.G.; Cooper, R.; Satpute, S.; Turner, R.L.; Cooper, R.A. Mini-Review: Robotic Wheelchair Taxonomy and Readiness. Neurosci. Lett. 2022, 772, 136482. [Google Scholar] [CrossRef]
- Meligy, R.; Ahmad, A.R.; Mekid, S. An IoT-Based Smart Wheelchair with EEG Control and Vital Sign Monitoring. Eng. Proc. 2024, 82, 46. [Google Scholar] [CrossRef]
- Hou, L.; Latif, J.; Mehryar, P.; Withers, S.; Plastropoulos, A.; Shen, L.; Ali, Z. An Autonomous Wheelchair with Health Monitoring System Based on Internet of Thing. Sci. Rep. 2024, 14, 5878. [Google Scholar] [CrossRef]
- Ghanayem, H.; Alathamneh, M.; Nelms, R.M. PMSM Field-Oriented Control with Independent Speed and Flux Controllers for Continuous Operation under Open-Circuit Fault at Light Load Conditions. Energies 2024, 17, 593. [Google Scholar] [CrossRef]
- Li, Y.; Ge, S.; Dai, S.; Zhao, L.; Yan, X.; Zheng, Y.; Shi, Y. Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation. Sensors 2020, 20, 75. [Google Scholar] [CrossRef]
- Welihinda, D.V.D.S.; Gunarathne, L.K.P.; Herath, H.M.K.K.M.B.; Yasakethu, S.L.P.; Madusanka, N.; Lee, B.-I. EEG and EMG-Based Human-Machine Interface for Navigation of Mobility-Related Assistive Wheelchair (MRA-W). Heliyon 2024, 10, e27777. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).