
A Hybrid Multi-Strategy Optimization Metaheuristic Algorithm for Multi-Level Thresholding Color Image Segmentation


Abstract
1. Introduction
- A novel hybrid metaheuristic algorithm (COSGO) is proposed, which integrates grey wolf optimization (GWO) and Sand Cat Swarm Optimization (SCSO) to enhance global optimization performance.
- The COSGO algorithm is specifically designed to overcome the local optima problem by improving exploration capabilities. The adaptive characteristics of SCSO are used to increase the diversity of GWO, thereby achieving a better balance between exploration and exploitation.
- A chaotic opposition-based learning (COBL) strategy is incorporated into the hybrid metaheuristic algorithm to further improve convergence speed and solution quality by enhancing population diversity.
- The proposed algorithm is applied to the multi-level thresholding color image segmentation problem, aiming to reduce computational effort in finding optimal threshold values. Both Otsu’s method and Kapur’s entropy are employed as objective functions.
- Experimental validation is conducted using the BSD500 dataset (10 color images) to demonstrate the segmentation quality and effectiveness of the COSGO algorithm.
- Comprehensive performance evaluation is carried out using the CEC2017 benchmark suite, and statistical significance is assessed using the Friedman ranking test, confirming the competitive performance of the proposed approach.
2. Fundamentals
2.1. Grey Wolf Optimization (GWO)
2.2. Sand Cat Swarm Optimization (SCSO)
2.3. Multi-Level Thresholding Image Segmentation
2.3.1. Otsu Method
2.3.2. Kapur Method
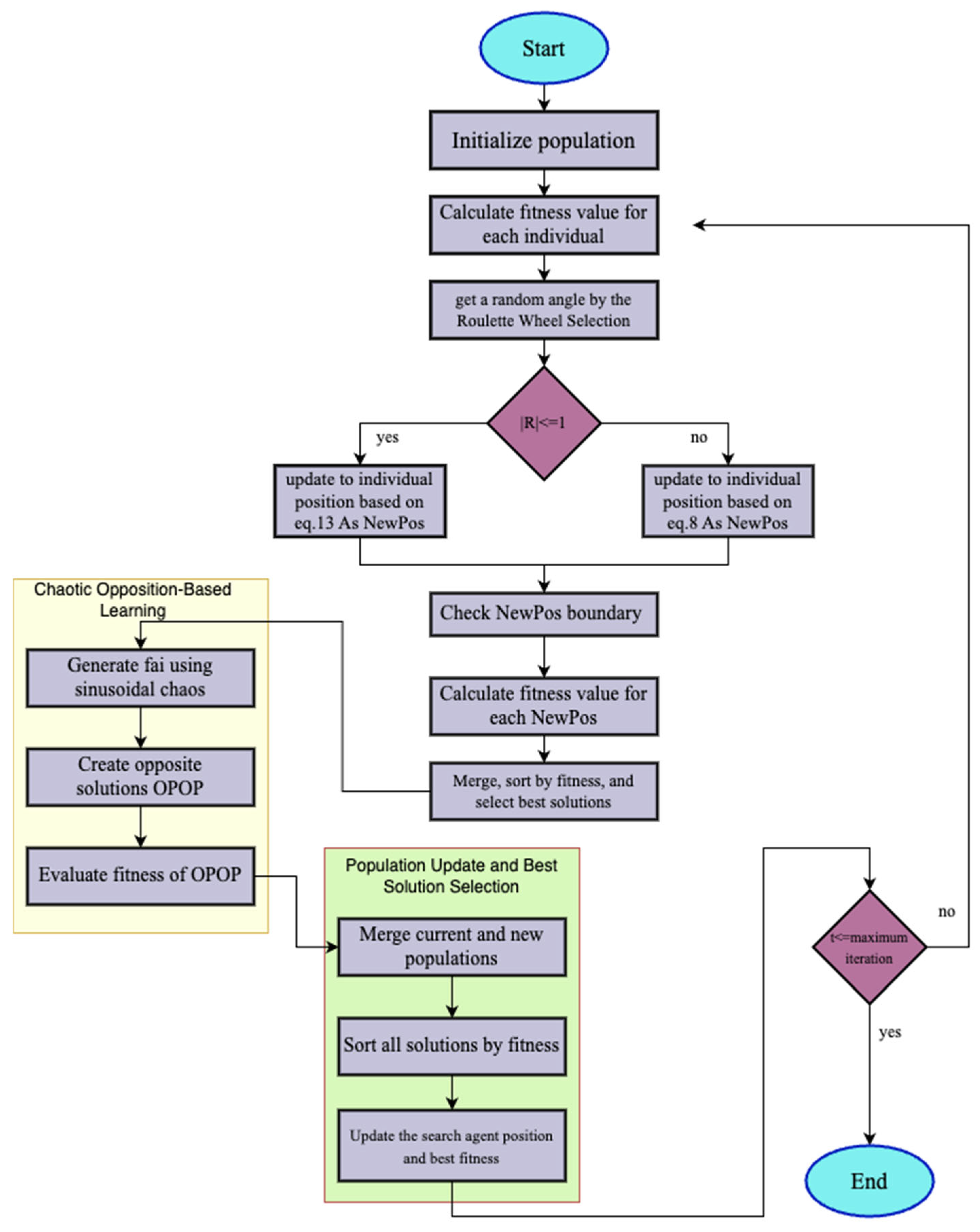
3. Hybrid Metaheuristic Algorithm
3.1. Hybridization SCSO and GWO
3.2. Chaotic Opposition-Based Learning Strategy
3.3. System Model
- T: number of thresholds (3–5 in this study).
- MaxIter: maximum number of iterations (e.g., 100).
- PopulationSize: number of candidate solutions (e.g., 30).
- Objective Functions: Otsu method and Kapur entropy.
- Dataset: BSD500 (10 selected color images).
- Channels: R, G, and B (treated independently for thresholding).
- Evaluation Metric: PSNR, SSIM, and computation time.
4. Results and Analysis
4.1. Experimental Analysis Based on CEC2017
4.2. Experimental Analysis Based on Multi-Level Thresholding
4.3. Performance Analysis
4.4. Objective Function Analysis
4.5. Theoretical Insights into the COSGO Algorithm
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, Y.; Li, M.; Zhou, M. Multi-Threshold Image Segmentation Based on the Improved Dragonfly Algorithm. Mathematics 2024, 12, 854. [Google Scholar] [CrossRef]
- Akay, R.; Saleh, R.A.; Farea, S.M.; Kanaan, M. Multilevel thresholding segmentation of color plant disease images using metaheuristic optimization algorithms. Neural Comput. Appl. 2022, 34, 1161–1179. [Google Scholar] [CrossRef]
- Oliva, D.; Abd Elaziz, M.; Hinojosa, S. Metaheuristic Algorithms for Image Segmentation: Theory and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 59–69. [Google Scholar]
- Abualigah, L.; Almotairi, K.H.; Elaziz, M.A. Multilevel thresholding image segmentation using meta-heuristic optimization algorithms: Comparative analysis, open challenges and new trends. Appl. Intell. 2023, 53, 11654–11704. [Google Scholar] [CrossRef]
- Hu, P.; Han, Y.; Zhang, Z. Multi-Level Thresholding Color Image Segmentation Using Modified Gray Wolf Optimizer. Biomimetics 2024, 9, 700. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Pei, Y.H.; Wang, X.X.; Hou, H.Y.; Fu, L.H. Symmetric cross-entropy multi-threshold color image segmentation based on improved pelican optimization algorithm. PLoS ONE 2023, 18, e0287573. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2007, 1, 28–39. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2023, 39, 2627–2651. [Google Scholar] [CrossRef]
- Rashedi E, Nezamabadi-Pour H, Saryazdi S GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [CrossRef]
- Erol, O.K.; Eksin, I. A new optimization method: Big bang–big crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Kaveh A, Talatahari S A novel heuristic optimization method: Charged system search. Acta Mech. 2010, 213, 267–289. [CrossRef]
- Ma, G.; Yue, X. An improved whale optimization algorithm based on multilevel threshold image segmentation using the Otsu method. Eng. Appl. Artif. Intell. 2022, 113, 104960. [Google Scholar] [CrossRef]
- Houssein, E.H.; Helmy, B.E.D.; Oliva, D.; Elngar, A.A.; Shaban, H. A novel black widow optimization algorithm for multilevel thresholding image segmentation. Expert Syst. Appl. 2021, 167, 114159. [Google Scholar] [CrossRef]
- Singh, S.; Mittal, N.; Singh, H. A multilevel thresholding algorithm using LebTLBO for image segmentation. Neural Comput. Appl. 2020, 32, 16681–16706. [Google Scholar] [CrossRef]
- Chakraborty, F.; Roy, P.K. An efficient multilevel thresholding image segmentation through improved elephant herding optimization. Evol. Intell. 2025, 18, 17. [Google Scholar] [CrossRef]
- Gao, S.; Iu, H.H.C.; Erkan, U.; Simsek, C.; Toktas, A.; Cao, Y.; Wu, R.; Mou, J.; Li, Q.; Wang, C. A 3D memristive cubic map with dual discrete memristors: Design, implementation, and application in image encryption. IEEE Trans. Circuits Syst. Video Technol. 2025. Early Access. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, Z.; Iu, H.H.C.; Ding, S.; Mou, J.; Erkan, U.; Toktas, A.; Li, Q.; Wang, C.; Cao, Y. A Parallel Color Image Encryption Algorithm Based on a 2D Logistic-Rulkov Neuron Map. IEEE Internet Things J. 2025, 12, 18115–18124. [Google Scholar] [CrossRef]
- Deng, W.; Wang, J.; Guo, A.; Zhao, H. Quantum differential evolutionary algorithm with quantum-adaptive mutation strategy and population state evaluation framework for high-dimensional problems. Inf. Sci. 2024, 676, 120787. [Google Scholar] [CrossRef]
- Song, Y.; Song, C. Adaptive evolutionary multitask optimization based on anomaly detection transfer of multiple similar sources. Expert Syst. Appl. 2025, 283, 127599. [Google Scholar] [CrossRef]
- Deng, W.; Feng, J.; Zhao, H. Autonomous path planning via sand cat swarm optimization with multi-strategy mechanism for unmanned aerial vehicles in dynamic environment. IEEE Internet Things J. 2025. Early Access. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.; Lu, M.; Yang, J.; Gui, J.; Zhang, S. From simple to complex scenes: Learning robust feature representations for accurate human parsing. IEEE Trans. Pattern Anal. Mach. Intell. 2024, 46, 5449–5462. [Google Scholar] [CrossRef]
- Serbet, F.; Kaya, T. New comparative approach to multi-level thresholding: Chaotically initialized adaptive meta-heuristic optimization methods. Neural Comput. Appl. 2025, 37, 8371–8396. [Google Scholar] [CrossRef]
- Hamza, A.; Grimes, M.; Boukabou, A.; Lekouaghet, B.; Oliva, D.; Dib, S.; Himeur, Y. A chaotic variant of the Golden Jackal Optimizer and its application for medical image segmentation. Appl. Intell. 2025, 55, 295. [Google Scholar] [CrossRef]
- Li, C.; Liu, H. A transit search algorithm with chaotic map and local escape operator for multi-level threshold segmentation of spleen CT images. Appl. Math. Model. 2025, 141, 115930. [Google Scholar] [CrossRef]
- Ting, T.O.; Yang, X.S.; Cheng, S.; Huang, K. Hybrid Metaheuristic Algorithms: Past, Present, and Future. In Recent Advances in Swarm Intelligence and Evolutionary Computation; Springer: Berlin/Heidelberg, Germany, 2015; pp. 71–83. [Google Scholar]
- Amirsadri, S.; Mousavirad, S.J.; Ebrahimpour-Komleh, H. A Levy flight-based grey wolf optimizer combined with back-propagation algorithm for neural network training. Neural Comput. Appl. 2018, 30, 3707–3720. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Vienna, Austria, 28–30 November 2005; Volume 1, pp. 695–701. [Google Scholar]
- Long, W.; Jiao, J.; Liang, X.; Cai, S.; Xu, M. A random opposition-based learning grey wolf optimizer. IEEE Access 2019, 7, 113810–113825. [Google Scholar] [CrossRef]
- Rani, G.S.; Jayan, S.; Alatas, B. Analysis of chaotic maps for global optimization and a hybrid chaotic pattern search algorithm for optimizing the reliability of a bank. IEEE Access 2023, 11, 24497–24510. [Google Scholar] [CrossRef]
- Lu, H.; Wang, X.; Fei, Z.; Qiu, M. The effects of using chaotic map on improving the performance of multiobjective evolutionary algorithms. Math. Probl. Eng. 2014, 2014, 924652. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Sharma, S.; Kapoor, R.; Dhiman, S. A novel hybrid metaheuristic based on augmented grey wolf optimizer and cuckoo search for global optimization. In Proceedings of the 2021 2nd International Conference on Secure Cyber Computing and Communications (ICSCCC), Jalandhar, India, 21–23 May 2021; pp. 376–381. [Google Scholar]
- Mirjalili, S.; Hashim, S.Z.M. A new hybrid PSOGSA algorithm for function optimization. In Proceedings of the 2010 International Conference on Computer and Information Application, Tianjin, China, 3–5 December 2010; pp. 374–377. [Google Scholar]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the Proceedings Eighth IEEE International Conference on Computer Vision. ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Value | Algorithm | Parameter | Value |
|---|---|---|---|---|---|
| GWO | a | [2, 0] | SCSO | Sensitivity range (rG) | [2, 0] |
| A | [2, 0] | Phase control range (R) | [−2rG, 2rG] | ||
| AGWO_CS | a | WOA | a | [2, 0] | |
| PSOGSA | 1 | A | [2, 0] | ||
| C1 | 0.5 | C | 2.rand (0, 1) | ||
| C2 | 1.5 | l | [−1, 1] | ||
| b | 1 |
| Function | COSGO | GWO | SCSO | WOA | AGWO-CS | PSOGSA | |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 2840 | 35,700 | 1.9 × 109 | 37,800,000 | 14,600.00 | 108,000.00 |
| Worst | 8420 | 54,800 | 1.92 × 109 | 1.14 × 109 | 210,000.00 | 240,000.00 | |
| Best | 126 | 17,300 | 1.89 × 109 | 134 | 16,600.00 | 19,500.00 | |
| STD | 2380 | 9430 | 9,280,000 | 207,000 | 38,500.00 | 45,000.00 | |
| F3 | Mean | 300 | 1410 | 2460 | 877 | 2520.00 | 877.00 |
| Worst | 301 | 4300 | 27,500 | 3830 | 8500.00 | 3830.00 | |
| Best | 300 | 546 | 300 | 302 | 378.00 | 302.00 | |
| STD | 0.221 | 960 | 6000 | 937 | 2170.00 | 937.00 | |
| F4 | Mean | 424 | 418 | 421 | 402 | 424.00 | 409.00 |
| Worst | 527 | 464 | 529 | 403 | 527.00 | 440.00 | |
| Best | 403 | 407 | 404 | 400 | 403.00 | 406.00 | |
| STD | 27.8 | 19.8 | 28.1 | 0.818 | 27.80 | 6.01 | |
| F5 | Mean | 521 | 520 | 535 | 515 | 521.00 | 516.00 |
| Worst | 537 | 542 | 565 | 529 | 537.00 | 535.00 | |
| Best | 510 | 506 | 505 | 508 | 510.00 | 504.00 | |
| STD | 7.06 | 10.4 | 13.4 | 4.6 | 7.06 | 9.11 | |
| F6 | Mean | 600 | 601 | 613 | 613 | 604.00 | 601.00 |
| Worst | 600 | 605 | 643 | 640 | 614.00 | 605.00 | |
| Best | 600 | 600 | 602 | 600 | 600.00 | 600.00 | |
| STD | 0.0234 | 1.11 | 11.4 | 11.6 | 3.13 | 1.08 | |
| F7 | Mean | 719 | 731 | 763 | 724 | 738.00 | 734.00 |
| Worst | 729 | 746 | 803 | 749 | 765.00 | 756.00 | |
| Best | 713 | 717 | 730 | 712 | 715.00 | 716.00 | |
| STD | 3.52 | 10 | 20.5 | 9.88 | 12.00 | 11.10 | |
| F8 | Mean | 812 | 816 | 827 | 834 | 819.00 | 817.00 |
| Worst | 824 | 837 | 838 | 857 | 829.00 | 835.00 | |
| Best | 805 | 805 | 814 | 818 | 811.00 | 805.00 | |
| STD | 5.41 | 8.11 | 7.33 | 8.04 | 4.94 | 7.66 | |
| F9 | Mean | 900 | 907 | 997 | 913 | 919.00 | 910.00 |
| Worst | 900 | 969 | 1280 | 970 | 973.00 | 984.00 | |
| Best | 900 | 900 | 903 | 905 | 900.00 | 900.00 | |
| STD | 0.0124 | 14.3 | 88.8 | 11.4 | 24.10 | 21.70 | |
| F10 | Mean | 1500 | 1720 | 1890 | 1520 | 1900.00 | 1480.00 |
| Worst | 2270 | 2840 | 2490 | 2000 | 2520.00 | 2500.00 | |
| Best | 1000 | 1180 | 1240 | 1250 | 1420.00 | 1130.00 | |
| STD | 450 | 412 | 296 | 156 | 308.00 | 317.00 | |
| F11 | Mean | 1150 | 1120 | 1100 | 1110 | 1150.00 | 1130.00 |
| Worst | 1240 | 1150 | 1110 | 1130 | 1240.00 | 1310.00 | |
| Best | 1120 | 1100 | 1100 | 1100 | 1120.00 | 1110.00 | |
| STD | 31.3 | 11.3 | 2.01 | 5.82 | 31.30 | 44.20 | |
| F12 | Mean | 641,000 | 948,000 | 943,000 | 844,000 | 641,000.00 | 844,000.00 |
| Worst | 2,820,000 | 7,210,000 | 3,890,000 | 2,740,000 | 2,820,000.00 | 2,740,000.00 | |
| Best | 13,200 | 27,700 | 46,100 | 8660 | 13,200.00 | 8660.00 | |
| STD | 740,000 | 1,410,000 | 999,000 | 901,000 | 740,000.00 | 901,000.00 | |
| F13 | Mean | 8300 | 13,000 | 11,600 | 8450 | 8450.00 | 12,600.00 |
| Worst | 29,000 | 26,500 | 35,100 | 15,400 | 15,400.00 | 29,700.00 | |
| Best | 1360 | 2280 | 2500 | 3190 | 3190.00 | 3140.00 | |
| STD | 7650 | 7460 | 8740 | 2990 | 2990.00 | 6760.00 | |
| F14 | Mean | 1450 | 2900 | 2100 | 1470 | 3060.00 | 1540.00 |
| Worst | 1480 | 7240 | 5230 | 1560 | 5560.00 | 1610.00 | |
| Best | 1440 | 1450 | 1440 | 1420 | 1450.00 | 1500.00 | |
| STD | 11.3 | 1860 | 1400 | 35.2 | 1740.00 | 24.00 | |
| F15 | Mean | 1540 | 4380 | 2710 | 1690 | 5230.00 | 4120.00 |
| Worst | 1580 | 10,100 | 7690 | 2820 | 10,600.00 | 6020.00 | |
| Best | 1510 | 1650 | 1560 | 1520 | 1580.00 | 1640.00 | |
| STD | 16.1 | 2270 | 1420 | 255 | 2440.00 | 1150.00 | |
| F16 | Mean | 1770 | 1820 | 1800 | 1780 | 1770.00 | 1700.00 |
| Worst | 1990 | 2240 | 2000 | 1960 | 1990.00 | 2050.00 | |
| Best | 1620 | 1600 | 1620 | 1600 | 1620.00 | 1610.00 | |
| STD | 118 | 178 | 108 | 111 | 118.00 | 115.00 | |
| F17 | Mean | 1760 | 1760 | 1760 | 1790 | 1760.00 | 1790.00 |
| Worst | 1870 | 1890 | 1820 | 1880 | 1870.00 | 1880.00 | |
| Best | 1720 | 1720 | 1730 | 1740 | 1720.00 | 1740.00 | |
| STD | 34.2 | 37.1 | 19.1 | 34.4 | 34.20 | 34.40 | |
| F18 | Mean | 20,800 | 25,300 | 18,900 | 16,100 | 20,800.00 | 30,800.00 |
| Worst | 41,200 | 55,300 | 50,500 | 40,900 | 41,200.00 | 55,600.00 | |
| Best | 3640 | 4060 | 2010 | 2480 | 3640.00 | 2930.00 | |
| STD | 13,600 | 13,900 | 12,500 | 12,100 | 13,600.00 | 16,200.00 | |
| F19 | Mean | 1930 | 8260 | 6690 | 2770 | 15,400.00 | 8380.00 |
| Worst | 1970 | 18,600 | 14,700 | 10,100 | 258,000.00 | 18,900.00 | |
| Best | 1910 | 1930 | 1910 | 1900 | 1910.00 | 1920.00 | |
| STD | 13.2 | 6190 | 5640 | 1860 | 46,200.00 | 6530.00 | |
| F20 | Mean | 2020 | 2200 | 2100 | 2040 | 2090.00 | 2060.00 |
| Worst | 2030 | 2280 | 2230 | 2150 | 2220.00 | 2150.00 | |
| Best | 2000 | 2180 | 2040 | 2000 | 2030.00 | 2020.00 | |
| STD | 7.51 | 19.8 | 55 | 46 | 58.40 | 43.10 | |
| F21 | Mean | 2270 | 2270 | 2260 | 2300 | 2310.00 | 2310.00 |
| Worst | 2330 | 2330 | 2340 | 2340 | 2340.00 | 2340.00 | |
| Best | 2200 | 2100 | 2100 | 2200 | 2200.00 | 2200.00 | |
| STD | 53.7 | 63.2 | 69.6 | 48.5 | 30.40 | 21.70 | |
| F22 | Mean | 2300 | 2300 | 2300 | 2310 | 2310.00 | 2310.00 |
| Worst | 2310 | 2320 | 2330 | 2340 | 2340.00 | 2330.00 | |
| Best | 2200 | 2220 | 2250 | 2300 | 2300.00 | 2300.00 | |
| STD | 18.7 | 16 | 14.1 | 8.76 | 8.76 | 6.33 | |
| F23 | Mean | 2620 | 2620 | 2640 | 2620 | 2620.00 | 2620.00 |
| Worst | 2650 | 2640 | 2690 | 2630 | 2650.00 | 2650.00 | |
| Best | 2610 | 2600 | 2620 | 2610 | 2610.00 | 2610.00 | |
| STD | 8.73 | 9.8 | 14.4 | 7.75 | 8.73 | 11.20 | |
| F24 | Mean | 2750 | 2730 | 2750 | 2740 | 2750.00 | 2750.00 |
| Worst | 2800 | 2780 | 2820 | 2780 | 2800.00 | 2770.00 | |
| Best | 2720 | 2510 | 2500 | 2500 | 2720.00 | 2730.00 | |
| STD | 14.3 | 61.8 | 67 | 53.5 | 14.30 | 13.00 | |
| F25 | Mean | 2930 | 2940 | 2940 | 2930 | 2930.00 | 2940.00 |
| Worst | 2950 | 2950 | 3020 | 2950 | 2950.00 | 3020.00 | |
| Best | 2910 | 2900 | 2900 | 2900 | 2910.00 | 2900.00 | |
| STD | 13 | 14.2 | 22.7 | 22.8 | 13.00 | 22.80 | |
| F26 | Mean | 3040 | 2930 | 3010 | 2940 | 3040.00 | 2960.00 |
| Worst | 4060 | 3190 | 3470 | 3830 | 4060.00 | 3840.00 | |
| Best | 2750 | 2900 | 2810 | 2600 | 2750.00 | 2900.00 | |
| STD | 289 | 59.6 | 128 | 186 | 289.00 | 171.00 | |
| F27 | Mean | 3100 | 3100 | 3100 | 3100 | 3100.00 | 3090.00 |
| Worst | 3170 | 3120 | 3180 | 3160 | 3170.00 | 3100.00 | |
| Best | 3090 | 3090 | 3090 | 3090 | 3090.00 | 3090.00 | |
| STD | 17.5 | 5.8 | 18.6 | 16.4 | 17.50 | 3.02 | |
| F28 | Mean | 3370 | 3380 | 3280 | 3220 | 3370.00 | 3370.00 |
| Worst | 3480 | 3450 | 3410 | 3410 | 3480.00 | 3410.00 | |
| Best | 3170 | 3180 | 3160 | 3100 | 3170.00 | 3170.00 | |
| STD | 99.7 | 62.6 | 109 | 144 | 99.70 | 83.90 | |
| F29 | Mean | 3200 | 3200 | 3250 | 3200 | 3200.00 | 3200.00 |
| Worst | 3290 | 3320 | 3450 | 3310 | 3290.00 | 3300.00 | |
| Best | 3160 | 3150 | 3160 | 3150 | 3160.00 | 3140.00 | |
| STD | 38.5 | 50 | 70.2 | 44.1 | 38.50 | 42.50 | |
| F30 | Mean | 33,200 | 550,000 | 464,000 | 253,000 | 648,000.00 | 893,000.00 |
| Worst | 831,000 | 1,920,000 | 2,270,000 | 821,000 | 6,730,000.00 | 2,450,000.00 | |
| Best | 3820 | 5430 | 7120 | 4520 | 8600.00 | 7470.00 | |
| STD | 151,000 | 715,000 | 658,000 | 378,000 | 1,460,000.00 | 621,000.00 |
| Function | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA |
|---|---|---|---|---|---|---|
| 1 | 1 | 3 | 6 | 5 | 2 | 4 |
| 3 | 1 | 4 | 5 | 2.5 | 6 | 2.5 |
| 4 | 5 | 3 | 4 | 1 | 5 | 2 |
| 5 | 4 | 3 | 6 | 1 | 4 | 2 |
| 6 | 1 | 2.5 | 5.5 | 5.5 | 4 | 2.5 |
| 7 | 1 | 3 | 6 | 2 | 5 | 4 |
| 8 | 1 | 2 | 5 | 6 | 4 | 3 |
| 9 | 1 | 2 | 6 | 4 | 5 | 3 |
| 10 | 2 | 4 | 5 | 3 | 6 | 1 |
| 11 | 5 | 3 | 1 | 2 | 5 | 4 |
| 12 | 1.5 | 6 | 5 | 3.5 | 1.5 | 3.5 |
| 13 | 1 | 6 | 4 | 2.5 | 2.5 | 5 |
| 14 | 1 | 5 | 4 | 2 | 6 | 3 |
| 15 | 1 | 5 | 3 | 2 | 6 | 4 |
| 16 | 2 | 6 | 5 | 4 | 2 | 1 |
| 17 | 2.5 | 2.5 | 2.5 | 5.5 | 2.5 | 5.5 |
| 18 | 3 | 5 | 2 | 1 | 3 | 6 |
| 19 | 1 | 4 | 3 | 2 | 6 | 5 |
| 20 | 1 | 6 | 5 | 2 | 4 | 3 |
| 21 | 2.5 | 2.5 | 1 | 4 | 5.5 | 5.5 |
| 22 | 2 | 2 | 2 | 5 | 5 | 5 |
| 23 | 3 | 3 | 6 | 3 | 3 | 3 |
| 24 | 3 | 1 | 3 | 2 | 3 | 3 |
| 25 | 2.5 | 5 | 5 | 2.5 | 2.5 | 5 |
| 26 | 5.5 | 1 | 4 | 2 | 5.5 | 3 |
| 27 | 4 | 4 | 4 | 4 | 4 | 1 |
| 28 | 4 | 6 | 2 | 1 | 4 | 4 |
| 29 | 3 | 3 | 6 | 3 | 3 | 3 |
| 30 | 1 | 4 | 3 | 2 | 5 | 6 |
| Total | 66.5 | 106.5 | 119 | 85 | 120 | 102.5 |
| Average Ranking | 2.2931 | 3.6724 | 4.1034 | 2.9310 | 4.1379 | 3.5345 |
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | |||
| 2 | 118031 | Value | −18,504.54 | −5.15 | −18,504.54 | −5.15 | −18,504.54 | −5.15 | −18,504.51 | −5.15 | −18,504.32 | −5.15 | −18,504.54 | −5.15 |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.05 | 0.00 | 0.15 | 0.00 | 0.00 | 0.00 | ||
| 118072 | Value | −9517.97 | −5.04 | −9517.97 | −5.04 | −9517.97 | −5.04 | −9517.96 | −5.04 | −9517.91 | −5.04 | −9517.97 | −5.04 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 | 0.00 | 0.06 | 0.00 | 0.00 | 0.00 | ||
| 326025 | Value | −6334.31 | −4.88 | −6334.31 | −4.88 | −6334.31 | −4.88 | −6334.31 | −4.88 | −6334.25 | −4.88 | −6334.31 | −4.88 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.08 | 0.00 | 0.00 | 0.00 | ||
| 120003 | Value | −26,805.11 | −5.22 | −26,805.11 | −5.22 | −26,805.11 | −5.22 | −26,805.08 | −5.22 | −26,804.92 | −5.22 | −26,805.11 | −5.22 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.06 | 0.00 | 0.05 | 0.00 | 0.00 | 0.00 | ||
| 253092 | Value | −15,027.04 | −4.99 | −15,027.01 | −4.99 | −15,027.04 | −4.99 | −15,027.04 | −4.99 | −15,026.96 | −4.99 | −15,027.04 | −4.99 | |
| STD | 0.00 | 0.00 | 0.08 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.09 | 0.00 | 0.00 | 0.00 | ||
| 8068 | Value | −12,529.92 | −4.65 | −12,529.92 | −4.65 | −12,529.92 | −4.65 | −12,529.92 | −4.65 | −12,529.85 | −4.65 | −12,529.92 | −4.65 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.10 | 0.00 | 0.00 | 0.00 | ||
| 81095 | Value | −15,094.56 | −5.16 | −15,094.56 | −5.16 | −15,094.56 | −5.16 | −15,094.56 | −5.16 | −15,094.53 | −5.16 | −15,094.56 | −5.16 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.06 | 0.00 | 0.00 | 0.00 | ||
| 92014 | Value | −14,961.03 | −4.55 | −14,961.03 | −4.55 | −14,961.03 | −4.55 | −14,961.03 | −4.55 | −14,960.91 | −4.55 | −14,961.03 | −4.55 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.13 | 0.00 | 0.00 | 0.00 | ||
| 365072 | Value | −17,439.29 | −5.48 | −17,439.29 | −5.48 | −17,439.29 | −5.48 | −17,439.29 | −5.48 | −17,439.23 | −5.48 | −17,439.29 | −5.48 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.09 | 0.00 | 0.00 | 0.00 | ||
| 384022 | Value | −15,896.95 | −5.16 | −15,896.95 | −5.16 | −15,896.95 | −5.16 | −15,896.93 | −5.16 | −15,896.90 | −5.16 | −15,896.95 | −5.16 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.05 | 0.00 | 0.03 | 0.00 | 0.00 | 0.00 | ||
| 3 | 118031 | Value | −18,730.87 | −5.15 | −18,730.74 | −5.15 | −18,730.87 | −5.15 | −18,730.84 | −5.15 | −18,730.08 | −5.15 | −18,730.87 | −5.15 |
| STD | 0.00 | 0.00 | 0.29 | 0.00 | 0.00 | 0.00 | 0.05 | 0.00 | 0.33 | 0.00 | 0.00 | 0.00 | ||
| 118072 | Value | −9640.56 | −5.04 | −9640.56 | −5.04 | −9640.54 | −5.04 | −9640.52 | −5.04 | −9639.99 | −5.04 | −9640.56 | −5.04 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.04 | 0.00 | 0.05 | 0.00 | 0.31 | 0.00 | 0.00 | 0.00 | ||
| 326025 | Value | −6504.93 | −4.88 | −6504.93 | −4.88 | −6504.92 | −4.88 | −6504.85 | −4.88 | −6504.16 | −4.88 | −6504.93 | −4.88 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.09 | 0.00 | 0.87 | 0.00 | 0.00 | 0.00 | ||
| 120003 | Value | −27,071.72 | −5.22 | −27,071.70 | −5.22 | −27,071.71 | −5.22 | −27,071.54 | −5.22 | −27,070.76 | −5.22 | −27,071.72 | −5.22 | |
| STD | 0.00 | 0.00 | 0.04 | 0.00 | 0.03 | 0.00 | 0.40 | 0.00 | 0.94 | 0.00 | 0.00 | 0.00 | ||
| 253092 | Value | −15,184.31 | −4.99 | −15,183.55 | −4.99 | −15,184.31 | −4.99 | −15,184.30 | −4.99 | −15,183.08 | −4.99 | −15,184.31 | −4.99 | |
| STD | 0.00 | 0.00 | 1.67 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.85 | 0.00 | 0.00 | 0.00 | ||
| 8068 | Value | −12,611.96 | −4.65 | −12,611.96 | −4.65 | −12,611.96 | −4.65 | −12,611.91 | −4.65 | −12,611.23 | −4.65 | −12,611.96 | −4.65 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.09 | 0.00 | 0.55 | 0.00 | 0.00 | 0.00 | ||
| 81095 | Value | −15,261.54 | −5.16 | −15,261.38 | −5.16 | −15,261.53 | −5.16 | −15,261.44 | −5.16 | −15,260.17 | −5.16 | −15,261.54 | −5.16 | |
| STD | 0.00 | 0.00 | 0.35 | 0.00 | 0.02 | 0.00 | 0.11 | 0.00 | 0.66 | 0.00 | 0.00 | 0.00 | ||
| 92014 | Value | −15,071.07 | −4.55 | −15,070.85 | −4.55 | −15,071.09 | −4.55 | −15,071.08 | −4.55 | −15,070.23 | −4.55 | −15,071.09 | −4.55 | |
| STD | 0.04 | 0.00 | 0.55 | 0.00 | 0.00 | 0.00 | 0.02 | 0.00 | 0.76 | 0.00 | 0.01 | 0.00 | ||
| 365072 | Value | −17,685.43 | −5.48 | −17,685.43 | −5.48 | −17,685.42 | −5.48 | −17,685.34 | −5.48 | −17,684.14 | −5.48 | −17,685.43 | −5.48 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.03 | 0.00 | 0.13 | 0.00 | 1.18 | 0.00 | 0.00 | 0.00 | ||
| 384022 | Value | −16,124.65 | −5.16 | −16,124.65 | −5.16 | −16,124.65 | −5.16 | −16,124.62 | −5.16 | −16,123.64 | −5.16 | −16,124.65 | −5.16 | |
| STD | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.00 | 0.04 | 0.00 | 0.77 | 0.00 | 0.00 | 0.00 | ||
| 4 | 118031 | Value | −18,805.074 | −5.152 | −18,804.707 | −5.152 | −18,805.081 | −5.152 | −18,804.720 | −5.152 | −18,801.351 | −5.152 | −18,805.082 | −5.152 |
| STD | 0.009 | 0.000 | 0.845 | 0.000 | 0.020 | 0.000 | 0.394 | 0.000 | 2.147 | 0.000 | 0.011 | 0.000 | ||
| 118072 | Value | −9695.921 | −5.036 | −9695.365 | −5.036 | −9695.908 | −5.036 | −9695.822 | −5.036 | −9693.808 | −5.036 | −9695.941 | −5.036 | |
| STD | 0.019 | 0.000 | 1.271 | 0.000 | 0.040 | 0.000 | 0.164 | 0.000 | 1.821 | 0.000 | 0.000 | 0.000 | ||
| 326025 | Value | −6593.882 | −4.885 | −6593.882 | −4.885 | −6593.886 | −4.885 | −6593.854 | −4.885 | −6592.268 | −4.885 | −6593.886 | −4.885 | |
| STD | 0.014 | 0.000 | 0.014 | 0.000 | 0.005 | 0.000 | 0.044 | 0.000 | 1.137 | 0.000 | 0.005 | 0.000 | ||
| 120003 | Value | −27,163.825 | −5.220 | −27,163.808 | −5.220 | −27,163.801 | −5.220 | −27,163.555 | −5.220 | −27,161.155 | −5.220 | −27,163.828 | −5.220 | |
| STD | 0.003 | 0.000 | 0.038 | 0.000 | 0.054 | 0.000 | 0.244 | 0.000 | 1.277 | 0.000 | 0.000 | 0.000 | ||
| 253092 | Value | −15,254.533 | −4.990 | −15,254.046 | −4.990 | −15,254.540 | −4.990 | −15,254.434 | −4.990 | −15,252.271 | −4.990 | −15,254.543 | −4.990 | |
| STD | 0.015 | 0.000 | 1.078 | 0.000 | 0.008 | 0.000 | 0.105 | 0.000 | 1.013 | 0.000 | 0.000 | 0.000 | ||
| 8068 | Value | −12,666.569 | −4.645 | −12,666.569 | −4.645 | −12,666.571 | −4.645 | −12,666.394 | −4.645 | −12,664.976 | −4.645 | −12,662.381 | −4.645 | |
| STD | 0.004 | 0.000 | 0.004 | 0.000 | 0.000 | 0.000 | 0.215 | 0.000 | 1.148 | 0.000 | 9.369 | 0.000 | ||
| 81095 | Value | −15,321.807 | −5.156 | −15,321.806 | −5.156 | −15,321.817 | −5.156 | −15,321.695 | −5.156 | −15,320.714 | −5.156 | −15,321.807 | −5.156 | |
| STD | 0.028 | 0.000 | 0.031 | 0.000 | 0.023 | 0.000 | 0.161 | 0.000 | 0.590 | 0.000 | 0.028 | 0.000 | ||
| 92014 | Value | −15,132.280 | −4.552 | −15,132.276 | −4.552 | −15,132.281 | −4.552 | −15,132.270 | −4.552 | −15,129.595 | −4.552 | −15,132.276 | −4.552 | |
| STD | 0.005 | 0.000 | 0.006 | 0.000 | 0.005 | 0.000 | 0.031 | 0.000 | 1.515 | 0.000 | 0.007 | 0.000 | ||
| 365072 | Value | −17,791.010 | −5.483 | −17,790.996 | −5.483 | −17,791.033 | −5.483 | −17,790.846 | −5.483 | −17,787.168 | −5.483 | −17,791.008 | −5.483 | |
| STD | 0.032 | 0.000 | 0.051 | 0.000 | 0.000 | 0.000 | 0.275 | 0.000 | 1.619 | 0.000 | 0.041 | 0.000 | ||
| 384022 | Value | −16,180.251 | −5.160 | −16,180.238 | −5.160 | −16,169.119 | −5.160 | −16,179.835 | −5.160 | −16,177.785 | −5.160 | −16,179.035 | −5.160 | |
| STD | 0.009 | 0.000 | 0.009 | 0.000 | 24.859 | 0.000 | 0.661 | 0.000 | 1.126 | 0.000 | 2.727 | 0.000 | ||
| 5 | 118031 | Value | −18,843.8 | −5.15164 | −1.88 × 104 | −5.15 × 100 | −18,836 | −5.15164 | −18,843.5 | −5.15164 | −18,843.8 | −5.15164 | −1.88 × 104 | −5.15 × 100 |
| STD | 0.024575 | 0 | 2.185805 | 6.28 × 10−16 | 17.26396 | 0 | 0.432428 | 0 | 0.024575 | 0 | 2.185805 | 6.28 × 10−16 | ||
| 118072 | Value | −9.73 × 103 | −5.04 × 100 | −9.72 × 103 | −5.04 × 100 | −9.72 × 103 | −5.04 × 100 | −9.73 × 103 | −5.04 × 100 | −9.73 × 103 | −5.04 × 100 | −9.72 × 103 | −5.04 × 100 | |
| STD | 0.015209 | 8.88 × 10−16 | 1.713792 | 4.44 × 10−16 | 13.31547 | 4.44 × 10−16 | 0.437801 | 8.88 × 10−16 | 0.015209 | 8.88 × 10−16 | 1.713792 | 4.44 × 10−16 | ||
| 326025 | Value | −6640.82 | −4.88486 | −6.64 × 103 | −4.88 × 100 | −6.64 × 103 | −4.88 × 100 | −6.64 × 103 | −4.88 × 100 | −6640.82 | −4.88486 | −6.64 × 103 | −4.88 × 100 | |
| STD | 0.02325 | 0 | 0.000355 | 6.28 × 10−16 | 0.007064 | 7.69 × 10−16 | 0.321744 | 7.69 × 10−16 | 0.02325 | 0 | 0.000355 | 6.28 × 10−16 | ||
| 120003 | Value | −2.72 × 104 | −5.22 × 100 | −2.72 × 104 | −5.22 × 100 | −2.72 × 104 | −5.22 × 100 | −27,219.5 | −5.21957 | −2.72 × 104 | −5.22 × 100 | −2.72 × 104 | −5.22 × 100 | |
| STD | 0.062141 | 7.69 × 10−16 | 0.138989 | 8.88 × 10−16 | 0.239523 | 8.88 × 10−16 | 1.980433 | 0 | 0.062141 | 7.69 × 10−16 | 0.138989 | 8.88 × 10−16 | ||
| 253092 | Value | −1.53 × 104 | −4.99 × 100 | −15,292.5 | −4.99043 | −15,293.9 | −4.99043 | −15,285.9 | −4.99043 | −1.53 × 104 | −4.99 × 100 | −15,292.5 | −4.99043 | |
| STD | 0.088749 | 4.44 × 10−16 | 3.140839 | 0 | 0.001474 | 0 | 17.53074 | 0 | 0.088749 | 4.44 × 10−16 | 3.140839 | 0 | ||
| 8068 | Value | −1.27 × 104 | −4.65 × 100 | −1.27 × 104 | −4.65 × 100 | −1.27 × 104 | −4.65 × 100 | −1.27 × 104 | −4.65 × 100 | −1.27 × 104 | −4.65 × 100 | −1.27 × 104 | −4.65 × 100 | |
| STD | 0.005499 | 4.44 × 10−16 | 2.946929 | 4.44 × 10−16 | 0.022274 | 1.09 × 10−15 | 0.901476 | 8.88 × 10−16 | 0.005499 | 4.44 × 10−16 | 2.946929 | 4.44 × 10−16 | ||
| 81095 | Value | −1.54 × 104 | −5.16 × 100 | −1.54 × 104 | −5.16 × 100 | −1.54 × 104 | −5.16 × 100 | −1.54 × 104 | −5.16 × 100 | −1.54 × 104 | −5.16 × 100 | −1.54 × 104 | −5.16 × 100 | |
| STD | 0.006642 | 7.69 × 10−16 | 0.421632 | 4.44 × 10−16 | 16.24358 | 6.28 × 10−16 | 0.66682 | 4.44 × 10−16 | 0.006642 | 7.69 × 10−16 | 0.421632 | 4.44 × 10−16 | ||
| 92014 | Value | −1.52 × 104 | −4.55 × 100 | −15,159.7 | −4.55222 | −1.52 × 104 | −4.55 × 100 | −15,160.5 | −4.55222 | −1.52 × 104 | −4.55 × 100 | −15,159.7 | −4.55222 | |
| STD | 0.057762 | 6.28 × 10−16 | 1.830489 | 0 | 0.017674 | 4.44 × 10−16 | 0.052781 | 0 | 0.057762 | 6.28 × 10−16 | 1.830489 | 0 | ||
| 365072 | Value | −1.78 × 104 | −5.48 × 100 | −17,848.9 | −5.48253 | −1.78 × 104 | −5.48 × 100 | −1.78 × 104 | −5.48 × 100 | −1.78 × 104 | −5.48 × 100 | −17,848.9 | −5.48253 | |
| STD | 0.036263 | 4.44 × 10−16 | 0.030867 | 0 | 0.116513 | 1.09 × 10−15 | 0.150933 | 8.88 × 10−16 | 0.036263 | 4.44 × 10−16 | 0.030867 | 0 | ||
| 384022 | Value | −1.62 × 104 | −5.16 × 100 | −16,225.7 | −5.16025 | −1.62 × 104 | −5.16 × 100 | −16,226 | −5.16025 | −1.62 × 104 | −5.16 × 100 | −16,225.7 | −5.16025 | |
| STD | 0.020737 | 6.28 × 10−16 | 2.203184 | 0 | 0.211542 | 4.44 × 10−16 | 0.704882 | 0 | 0.020737 | 6.28 × 10−16 | 2.203184 | 0 | ||
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | ||
| 2 | 118031 | 0.8769 | 0.9559 | 0.2855 | 0.3186 | 0.2969 | 0.3218 | 0.2884 | 0.3146 | 0.3003 | 0.3298 | 0.2900 | 0.3198 |
| 118072 | 0.8331 | 0.9563 | 0.2861 | 0.3181 | 0.2898 | 0.3223 | 0.2802 | 0.3136 | 0.2966 | 0.3290 | 0.2842 | 0.3195 | |
| 326025 | 0.8368 | 0.9590 | 0.2862 | 0.3197 | 0.2938 | 0.3225 | 0.2825 | 0.3143 | 0.2943 | 0.3316 | 0.2940 | 0.3191 | |
| 120003 | 0.8435 | 0.9637 | 0.2842 | 0.3189 | 0.2879 | 0.3268 | 0.2821 | 0.3152 | 0.2973 | 0.3295 | 0.2824 | 0.3220 | |
| 253092 | 0.8432 | 0.9507 | 0.2859 | 0.3173 | 0.2913 | 0.3215 | 0.2791 | 0.3101 | 0.2938 | 0.3275 | 0.2840 | 0.3171 | |
| 8068 | 0.8437 | 0.9573 | 0.2831 | 0.3190 | 0.2913 | 0.3236 | 0.2809 | 0.3133 | 0.2930 | 0.3292 | 0.2878 | 0.3189 | |
| 81095 | 0.8351 | 0.9547 | 0.2794 | 0.3187 | 0.2902 | 0.3253 | 0.2815 | 0.3117 | 0.2932 | 0.3295 | 0.2949 | 0.3202 | |
| 92014 | 0.8507 | 0.9520 | 0.2860 | 0.3181 | 0.2919 | 0.3254 | 0.2846 | 0.3135 | 0.2951 | 0.3307 | 0.2859 | 0.3193 | |
| 365072 | 0.8325 | 0.9484 | 0.2786 | 0.3162 | 0.2830 | 0.3203 | 0.2828 | 0.3104 | 0.2919 | 0.3273 | 0.2839 | 0.3181 | |
| 384022 | 0.8334 | 0.9470 | 0.2813 | 0.3272 | 0.2872 | 0.3237 | 0.2815 | 0.3144 | 0.2912 | 0.3306 | 0.2899 | 0.3201 | |
| 3 | 118031 | 0.8883 | 0.9767 | 0.2931 | 0.3254 | 0.2945 | 0.3329 | 0.2934 | 0.3228 | 0.3139 | 0.3457 | 0.2949 | 0.3223 |
| 118072 | 0.8539 | 0.9695 | 0.2835 | 0.3258 | 0.2935 | 0.3288 | 0.2843 | 0.3256 | 0.3030 | 0.3432 | 0.2874 | 0.3237 | |
| 326025 | 0.8739 | 0.9839 | 0.2876 | 0.3290 | 0.2912 | 0.3324 | 0.2929 | 0.3260 | 0.3068 | 0.3430 | 0.2976 | 0.3245 | |
| 120003 | 0.8653 | 0.9769 | 0.2879 | 0.3265 | 0.2934 | 0.3373 | 0.2887 | 0.3277 | 0.3056 | 0.3451 | 0.2912 | 0.3251 | |
| 253092 | 0.8573 | 0.9601 | 0.2892 | 0.3198 | 0.2933 | 0.3295 | 0.2886 | 0.3206 | 0.3025 | 0.3352 | 0.2895 | 0.3199 | |
| 8068 | 0.8559 | 0.9788 | 0.2886 | 0.3257 | 0.2950 | 0.3330 | 0.2853 | 0.3247 | 0.3066 | 0.3376 | 0.2958 | 0.3290 | |
| 81095 | 0.8618 | 0.9609 | 0.2858 | 0.3259 | 0.2942 | 0.3347 | 0.2907 | 0.3215 | 0.3045 | 0.3396 | 0.2978 | 0.3251 | |
| 92014 | 0.8698 | 0.9725 | 0.2877 | 0.3270 | 0.2952 | 0.3323 | 0.2850 | 0.3238 | 0.3080 | 0.3436 | 0.2950 | 0.3256 | |
| 365072 | 0.8560 | 0.9618 | 0.2847 | 0.3252 | 0.2915 | 0.3322 | 0.2835 | 0.3212 | 0.3022 | 0.3418 | 0.2869 | 0.3213 | |
| 384022 | 0.8608 | 0.9753 | 0.2856 | 0.3246 | 0.2891 | 0.3333 | 0.2842 | 0.3265 | 0.3028 | 0.3391 | 0.2866 | 0.3258 | |
| 4 | 118031 | 0.9017 | 1.0080 | 0.2921 | 0.3369 | 0.2969 | 0.3355 | 0.2897 | 0.3271 | 0.3137 | 0.3503 | 0.3019 | 0.3348 |
| 118072 | 0.8971 | 0.9984 | 0.2908 | 0.3428 | 0.2975 | 0.3410 | 0.2858 | 0.3339 | 0.3101 | 0.3500 | 0.2942 | 0.3341 | |
| 326025 | 0.8771 | 1.0022 | 0.2892 | 0.3335 | 0.2933 | 0.3361 | 0.2896 | 0.3365 | 0.3105 | 0.3519 | 0.2980 | 0.3373 | |
| 120003 | 0.8722 | 0.9890 | 0.2991 | 0.3349 | 0.3004 | 0.3394 | 0.2889 | 0.3338 | 0.3160 | 0.3533 | 0.2955 | 0.3375 | |
| 253092 | 0.8793 | 0.9681 | 0.2998 | 0.3309 | 0.2947 | 0.3412 | 0.2890 | 0.3299 | 0.3079 | 0.3503 | 0.2948 | 0.3290 | |
| 8068 | 0.8901 | 0.9726 | 0.2894 | 0.3327 | 0.2974 | 0.3363 | 0.2852 | 0.3265 | 0.3094 | 0.3488 | 0.3010 | 0.3295 | |
| 81095 | 0.8797 | 0.9799 | 0.2907 | 0.3320 | 0.2980 | 0.3343 | 0.2864 | 0.3278 | 0.3073 | 0.3491 | 0.3021 | 0.3356 | |
| 92014 | 0.8896 | 1.0001 | 0.2932 | 0.3307 | 0.2961 | 0.3505 | 0.2912 | 0.3269 | 0.3113 | 0.3579 | 0.3006 | 0.3328 | |
| 365072 | 0.8610 | 0.9931 | 0.2892 | 0.3348 | 0.2938 | 0.3334 | 0.2892 | 0.3334 | 0.3063 | 0.3501 | 0.2931 | 0.3297 | |
| 384022 | 0.8790 | 0.9992 | 0.3008 | 0.3340 | 0.2968 | 0.3365 | 0.2919 | 0.3298 | 0.3055 | 0.3489 | 0.2950 | 0.3353 | |
| 5 | 118031 | 0.8970 | 0.9917 | 0.3113 | 0.3451 | 0.3047 | 0.3399 | 0.2965 | 0.3275 | 0.3205 | 0.3559 | 0.3045 | 0.3325 |
| 118072 | 0.8763 | 0.9898 | 0.3134 | 0.3415 | 0.2968 | 0.3365 | 0.2899 | 0.3288 | 0.3092 | 0.3631 | 0.2958 | 0.3310 | |
| 326025 | 0.8902 | 0.9990 | 0.3129 | 0.3465 | 0.3018 | 0.3399 | 0.2882 | 0.3254 | 0.3146 | 0.3597 | 0.3013 | 0.3326 | |
| 120003 | 0.8857 | 0.9936 | 0.3203 | 0.3486 | 0.3007 | 0.3337 | 0.2918 | 0.3315 | 0.3131 | 0.3546 | 0.3006 | 0.3329 | |
| 253092 | 0.9002 | 0.9818 | 0.3062 | 0.3390 | 0.2965 | 0.3347 | 0.2892 | 0.3282 | 0.3155 | 0.3731 | 0.2979 | 0.3289 | |
| 8068 | 0.8874 | 0.9833 | 0.3024 | 0.3401 | 0.2985 | 0.3323 | 0.2890 | 0.3261 | 0.3134 | 0.3605 | 0.3014 | 0.3330 | |
| 81095 | 0.8722 | 0.9910 | 0.3097 | 0.3348 | 0.2964 | 0.3393 | 0.2885 | 0.3291 | 0.3174 | 0.3679 | 0.3039 | 0.3286 | |
| 92014 | 0.8786 | 0.9942 | 0.3070 | 0.3421 | 0.2971 | 0.3399 | 0.2921 | 0.3394 | 0.3151 | 0.3699 | 0.2996 | 0.3276 | |
| 365072 | 0.8606 | 0.9963 | 0.2984 | 0.3395 | 0.2974 | 0.3364 | 0.2875 | 0.3285 | 0.3072 | 0.3522 | 0.2987 | 0.3273 | |
| 384022 | 0.8866 | 1.0177 | 0.2969 | 0.3346 | 0.2936 | 0.3376 | 0.2860 | 0.3283 | 0.3098 | 0.3548 | 0.2972 | 0.3271 | |
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | |||
| 2 | 118031 | PSNR | 19.51 | 16.14 | 19.51 | 16.76 | 19.51 | 16.23 | 19.50 | 16.47 | 19.42 | 15.46 | 19.51 | 16.18 |
| MSE | 727.94 | 1603.79 | 727.94 | 1416.16 | 727.94 | 1561.26 | 729.86 | 1484.20 | 743.18 | 1919.64 | 727.94 | 1588.24 | ||
| 118072 | PSNR | 19.54 | 16.80 | 19.54 | 17.66 | 19.54 | 17.91 | 19.54 | 16.87 | 19.54 | 15.06 | 19.54 | 17.08 | |
| MSE | 723.02 | 1498.45 | 723.02 | 1225.43 | 723.02 | 1223.50 | 723.09 | 1420.47 | 723.36 | 2130.41 | 723.02 | 1317.66 | ||
| 326025 | PSNR | 21.54 | 19.70 | 21.54 | 16.26 | 21.54 | 15.33 | 21.55 | 16.04 | 21.54 | 16.87 | 21.54 | 15.22 | |
| MSE | 455.85 | 761.11 | 455.85 | 2075.13 | 455.85 | 2277.03 | 455.55 | 1862.70 | 456.18 | 1659.86 | 455.85 | 3026.49 | ||
| 120003 | PSNR | 20.21 | 14.85 | 20.21 | 14.55 | 20.21 | 13.83 | 20.20 | 15.55 | 20.16 | 12.44 | 20.21 | 16.58 | |
| MSE | 619.69 | 2412.10 | 619.69 | 2619.17 | 619.69 | 2693.16 | 620.89 | 2017.50 | 627.36 | 4020.18 | 619.69 | 1658.73 | ||
| 253092 | PSNR | 15.16 | 14.42 | 15.16 | 14.35 | 15.16 | 14.35 | 15.17 | 14.17 | 15.17 | 13.81 | 15.16 | 14.81 | |
| MSE | 1981.66 | 2378.72 | 1979.69 | 2411.36 | 1981.66 | 2393.70 | 1979.08 | 2519.82 | 1975.38 | 2721.10 | 1981.66 | 2152.47 | ||
| 8068 | PSNR | 16.14 | 10.55 | 16.14 | 10.55 | 16.14 | 11.46 | 16.14 | 10.95 | 16.14 | 10.55 | 16.14 | 12.04 | |
| MSE | 1582.45 | 5747.19 | 1582.45 | 5737.83 | 1582.45 | 4724.23 | 1582.64 | 5410.56 | 1583.09 | 5919.62 | 1582.45 | 4177.89 | ||
| 81095 | PSNR | 20.00 | 15.64 | 20.00 | 16.07 | 20.00 | 16.52 | 20.00 | 16.84 | 19.99 | 14.97 | 20.00 | 15.98 | |
| MSE | 649.97 | 1775.69 | 649.97 | 1667.19 | 649.97 | 1506.76 | 649.97 | 1375.75 | 651.71 | 2083.89 | 649.97 | 1668.81 | ||
| 92014 | PSNR | 9.74 | 9.59 | 9.74 | 9.45 | 9.74 | 9.52 | 9.75 | 9.43 | 9.75 | 9.51 | 9.74 | 9.43 | |
| MSE | 6898.32 | 7156.04 | 6898.32 | 7382.34 | 6898.32 | 7269.33 | 6895.70 | 7433.11 | 6894.52 | 7287.66 | 6898.32 | 7432.31 | ||
| 365072 | PSNR | 20.67 | 12.86 | 20.67 | 12.53 | 20.67 | 13.04 | 20.67 | 14.42 | 20.66 | 13.50 | 20.67 | 16.95 | |
| MSE | 557.46 | 3465.46 | 557.46 | 3683.50 | 557.46 | 3291.42 | 557.46 | 2572.63 | 558.16 | 3347.27 | 557.46 | 1614.96 | ||
| 384022 | PSNR | 19.93 | 16.89 | 19.93 | 16.40 | 19.93 | 17.29 | 19.92 | 17.97 | 19.94 | 15.85 | 19.93 | 16.72 | |
| MSE | 661.26 | 1426.22 | 661.26 | 1589.15 | 661.26 | 1283.28 | 661.92 | 1091.16 | 659.15 | 1795.36 | 661.26 | 1527.68 | ||
| 3 | 118031 | PSNR | 22.9351 | 16.1268 | 22.9395 | 16.8132 | 22.9351 | 17.8432 | 22.9771 | 16.4218 | 23.0017 | 17.0766 | 22.9351 | 16.7904 |
| MSE | 330.8066 | 1587.5032 | 330.4663 | 1388.9745 | 330.8066 | 1081.3988 | 327.6347 | 1500.8736 | 325.8938 | 1308.5358 | 330.8066 | 1450.2195 | ||
| 118072 | PSNR | 21.8671 | 19.0321 | 21.8671 | 20.4082 | 21.8688 | 20.8823 | 21.8721 | 18.7467 | 21.8783 | 18.3972 | 21.8671 | 18.8232 | |
| MSE | 423.0325 | 857.9918 | 423.0325 | 609.7335 | 422.8679 | 573.7079 | 422.5413 | 921.7215 | 422.3121 | 1254.7416 | 423.0325 | 954.7287 | ||
| 326025 | PSNR | 24.0745 | 19.5266 | 24.0745 | 19.2204 | 24.0684 | 19.6495 | 24.0650 | 18.1740 | 24.0191 | 18.6720 | 24.0745 | 18.4796 | |
| MSE | 254.4667 | 768.5329 | 254.4667 | 947.5201 | 254.8246 | 754.1504 | 255.0223 | 1163.7450 | 257.7481 | 978.2080 | 254.4667 | 970.3092 | ||
| 120003 | PSNR | 23.5687 | 17.2643 | 23.5664 | 17.9989 | 23.5678 | 18.3603 | 23.5650 | 16.6042 | 23.5177 | 13.9925 | 23.5687 | 19.9053 | |
| MSE | 285.8943 | 1519.4354 | 286.0463 | 1195.9356 | 285.9580 | 1040.8176 | 286.1398 | 1836.8011 | 289.2805 | 2599.2134 | 285.8943 | 697.5528 | ||
| 253092 | PSNR | 15.6191 | 14.2779 | 15.6303 | 15.1022 | 15.6191 | 15.1786 | 15.6193 | 14.7340 | 15.5954 | 14.6339 | 15.6191 | 14.9065 | |
| MSE | 1783.0651 | 2450.0577 | 1778.4972 | 2014.7354 | 1783.0651 | 1985.2576 | 1783.0104 | 2188.1618 | 1792.8673 | 2267.9789 | 1783.0651 | 2107.3803 | ||
| 8068 | PSNR | 16.4546 | 11.0887 | 16.4546 | 12.5159 | 16.4546 | 11.8508 | 16.4526 | 11.2104 | 16.4597 | 10.1321 | 16.4546 | 12.1029 | |
| MSE | 1471.0292 | 5093.5785 | 1471.0292 | 3961.2185 | 1471.0292 | 4329.9797 | 1471.6988 | 4978.9180 | 1469.3146 | 6633.4375 | 1471.0292 | 4327.0509 | ||
| 81095 | PSNR | 23.5034 | 15.8988 | 23.4930 | 15.9230 | 23.5235 | 16.9943 | 23.5246 | 18.2818 | 23.5496 | 16.2688 | 23.5034 | 18.4466 | |
| MSE | 290.2267 | 1679.0968 | 290.9304 | 1693.7111 | 288.9014 | 1403.3690 | 288.8323 | 1116.9040 | 287.1832 | 1618.6846 | 290.2267 | 1002.2381 | ||
| 92014 | PSNR | 9.9854 | 9.8244 | 9.9835 | 9.8756 | 9.9855 | 9.6024 | 9.9837 | 9.6813 | 9.9798 | 9.8877 | 9.9854 | 9.6678 | |
| MSE | 6524.4049 | 6773.2089 | 6527.2132 | 6691.6330 | 6524.1913 | 7135.6674 | 6527.0265 | 7000.3487 | 6532.7637 | 6674.3300 | 6524.3526 | 7024.2659 | ||
| 365072 | PSNR | 23.2644 | 13.1461 | 23.2644 | 15.3812 | 23.2635 | 14.4680 | 23.2638 | 12.3608 | 23.2482 | 15.9268 | 23.2644 | 19.0736 | |
| MSE | 306.6449 | 3344.1274 | 306.6449 | 2150.0121 | 306.7088 | 2687.2560 | 306.6893 | 3777.8059 | 307.7983 | 2194.2999 | 306.6449 | 1173.5723 | ||
| 384022 | PSNR | 24.6464 | 16.2940 | 24.6464 | 17.2054 | 24.6443 | 18.0827 | 24.6481 | 16.4700 | 24.6232 | 17.7313 | 24.6464 | 18.0721 | |
| MSE | 223.0680 | 1558.4437 | 223.0680 | 1277.8032 | 223.1773 | 1046.8039 | 222.9844 | 1499.4587 | 224.2729 | 1210.3236 | 223.0680 | 1060.0297 | ||
| 4 | 118031 | PSNR | 24.53 | 17.50 | 24.56 | 18.93 | 24.52 | 17.82 | 24.54 | 17.66 | 24.48 | 15.88 | 24.53 | 18.40 |
| MSE | 229.08 | 1177.38 | 227.77 | 922.91 | 229.69 | 1135.00 | 228.78 | 1131.68 | 232.16 | 1716.31 | 228.92 | 1005.15 | ||
| 118072 | PSNR | 24.03 | 19.06 | 24.02 | 21.97 | 23.99 | 20.34 | 24.08 | 21.37 | 23.93 | 19.97 | 24.02 | 19.57 | |
| MSE | 256.87 | 935.98 | 257.66 | 438.79 | 259.48 | 658.31 | 254.19 | 638.95 | 263.56 | 807.32 | 257.63 | 876.66 | ||
| 326025 | PSNR | 25.98 | 22.17 | 25.98 | 19.93 | 25.97 | 19.83 | 25.98 | 21.05 | 25.94 | 17.46 | 25.97 | 19.21 | |
| MSE | 164.02 | 422.00 | 164.02 | 880.27 | 164.37 | 742.25 | 164.04 | 542.57 | 165.60 | 2176.26 | 164.37 | 926.52 | ||
| 120003 | PSNR | 25.26 | 16.71 | 25.26 | 20.61 | 25.27 | 17.52 | 25.25 | 19.97 | 25.20 | 13.14 | 25.27 | 18.46 | |
| MSE | 193.71 | 1893.83 | 193.61 | 621.12 | 193.38 | 1472.89 | 193.96 | 670.40 | 196.22 | 3350.84 | 193.18 | 1321.95 | ||
| 253092 | PSNR | 15.98 | 15.10 | 15.96 | 15.38 | 15.98 | 15.46 | 15.97 | 14.58 | 15.89 | 14.46 | 15.98 | 15.04 | |
| MSE | 1642.72 | 2017.10 | 1649.54 | 1898.59 | 1642.61 | 1854.57 | 1643.00 | 2306.10 | 1673.70 | 2356.26 | 1642.55 | 2066.07 | ||
| 8068 | PSNR | 16.46 | 10.98 | 16.46 | 12.07 | 16.46 | 13.60 | 16.47 | 11.64 | 16.45 | 9.96 | 16.49 | 12.68 | |
| MSE | 1469.12 | 5234.30 | 1469.12 | 4248.12 | 1468.47 | 3167.39 | 1466.01 | 4648.60 | 1472.55 | 6886.64 | 1459.92 | 3715.07 | ||
| 81095 | PSNR | 24.88 | 16.57 | 24.86 | 19.58 | 24.88 | 17.47 | 24.87 | 19.15 | 24.86 | 16.86 | 24.88 | 17.32 | |
| MSE | 211.34 | 1514.17 | 212.51 | 780.56 | 211.52 | 1278.55 | 211.78 | 868.95 | 212.49 | 1527.53 | 211.34 | 1352.85 | ||
| 92014 | PSNR | 10.10 | 9.83 | 10.10 | 9.97 | 10.10 | 10.05 | 10.10 | 9.65 | 10.10 | 9.88 | 10.10 | 9.85 | |
| MSE | 6356.41 | 6772.50 | 6356.94 | 6554.16 | 6356.25 | 6424.65 | 6356.11 | 7058.70 | 6355.09 | 6686.68 | 6357.70 | 6727.22 | ||
| 365072 | PSNR | 25.18 | 12.72 | 25.18 | 17.39 | 25.19 | 14.90 | 25.18 | 16.82 | 25.09 | 13.95 | 25.18 | 17.74 | |
| MSE | 197.06 | 3535.42 | 197.19 | 1317.40 | 196.95 | 2608.09 | 197.43 | 1726.96 | 201.56 | 2873.21 | 197.15 | 1578.84 | ||
| 384022 | PSNR | 25.61 | 16.98 | 25.64 | 19.43 | 25.37 | 20.50 | 25.52 | 17.88 | 25.52 | 17.29 | 25.66 | 20.30 | |
| MSE | 178.72 | 1321.67 | 177.47 | 884.30 | 189.47 | 672.84 | 182.51 | 1193.42 | 182.59 | 1274.93 | 176.83 | 699.73 | ||
| 5 | 118031 | PSNR | 26.05 | 18.60 | 26.05 | 20.34 | 26.14 | 18.51 | 26.16 | 21.66 | 25.96 | 18.63 | 26.02 | 19.27 |
| MSE | 161.68 | 1008.74 | 161.58 | 648.90 | 158.23 | 1011.57 | 157.78 | 469.07 | 165.38 | 1037.91 | 162.54 | 865.14 | ||
| 118072 | PSNR | 25.69 | 20.56 | 25.62 | 21.42 | 25.63 | 20.81 | 25.61 | 21.68 | 24.97 | 21.34 | 25.57 | 23.31 | |
| MSE | 175.60 | 681.95 | 178.19 | 495.47 | 178.10 | 694.31 | 178.67 | 449.19 | 208.81 | 504.80 | 180.20 | 315.30 | ||
| 326025 | PSNR | 27.63 | 19.80 | 27.63 | 22.53 | 27.63 | 18.87 | 27.61 | 22.49 | 27.39 | 20.11 | 27.64 | 22.14 | |
| MSE | 112.25 | 1023.23 | 112.18 | 395.52 | 112.23 | 1243.14 | 112.68 | 403.09 | 118.59 | 651.54 | 111.92 | 460.49 | ||
| 120003 | PSNR | 26.94 | 18.99 | 26.94 | 19.30 | 26.93 | 14.72 | 26.92 | 17.39 | 26.67 | 14.10 | 26.91 | 21.18 | |
| MSE | 131.66 | 846.31 | 131.44 | 998.71 | 131.75 | 2343.70 | 132.24 | 1702.88 | 139.94 | 2545.59 | 132.34 | 541.65 | ||
| 253092 | PSNR | 16.24 | 15.11 | 16.23 | 15.70 | 16.23 | 15.07 | 16.21 | 15.46 | 16.26 | 14.95 | 16.20 | 15.51 | |
| MSE | 1544.16 | 2021.33 | 1550.36 | 1770.17 | 1547.55 | 2028.60 | 1554.61 | 1856.85 | 1537.96 | 2106.70 | 1561.64 | 1850.45 | ||
| 8068 | PSNR | 16.62 | 11.69 | 16.62 | 14.12 | 16.62 | 13.98 | 16.61 | 12.71 | 16.63 | 10.85 | 16.63 | 13.34 | |
| MSE | 1414.48 | 4476.09 | 1414.45 | 2726.31 | 1414.55 | 2954.99 | 1418.46 | 3795.22 | 1413.46 | 5740.31 | 1413.74 | 3287.62 | ||
| 81095 | PSNR | 26.48 | 16.31 | 26.49 | 22.07 | 26.41 | 19.98 | 26.43 | 21.23 | 25.98 | 15.40 | 26.09 | 18.99 | |
| MSE | 146.24 | 1534.75 | 145.93 | 428.28 | 148.49 | 779.80 | 148.11 | 630.37 | 164.10 | 1958.40 | 161.68 | 952.29 | ||
| 92014 | PSNR | 10.15 | 9.72 | 10.14 | 9.87 | 10.15 | 9.81 | 10.14 | 9.94 | 10.15 | 9.94 | 10.15 | 9.82 | |
| MSE | 6285.96 | 6942.66 | 6289.18 | 6701.73 | 6287.07 | 6793.33 | 6298.67 | 6598.72 | 6288.24 | 6592.38 | 6288.95 | 6772.64 | ||
| 365072 | PSNR | 26.74 | 14.63 | 26.72 | 18.40 | 26.74 | 16.99 | 26.71 | 16.60 | 26.51 | 16.14 | 26.74 | 19.83 | |
| MSE | 137.74 | 2659.72 | 138.39 | 1148.47 | 137.89 | 1879.41 | 138.57 | 1962.17 | 145.11 | 2454.43 | 137.72 | 747.78 | ||
| 384022 | PSNR | 27.16 | 18.26 | 27.16 | 20.40 | 27.12 | 21.67 | 26.82 | 16.89 | 26.85 | 19.13 | 27.12 | 21.90 | |
| MSE | 125.14 | 1058.45 | 125.01 | 655.66 | 126.19 | 502.82 | 136.74 | 1398.76 | 134.34 | 1062.81 | 126.24 | 605.26 | ||
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | |||
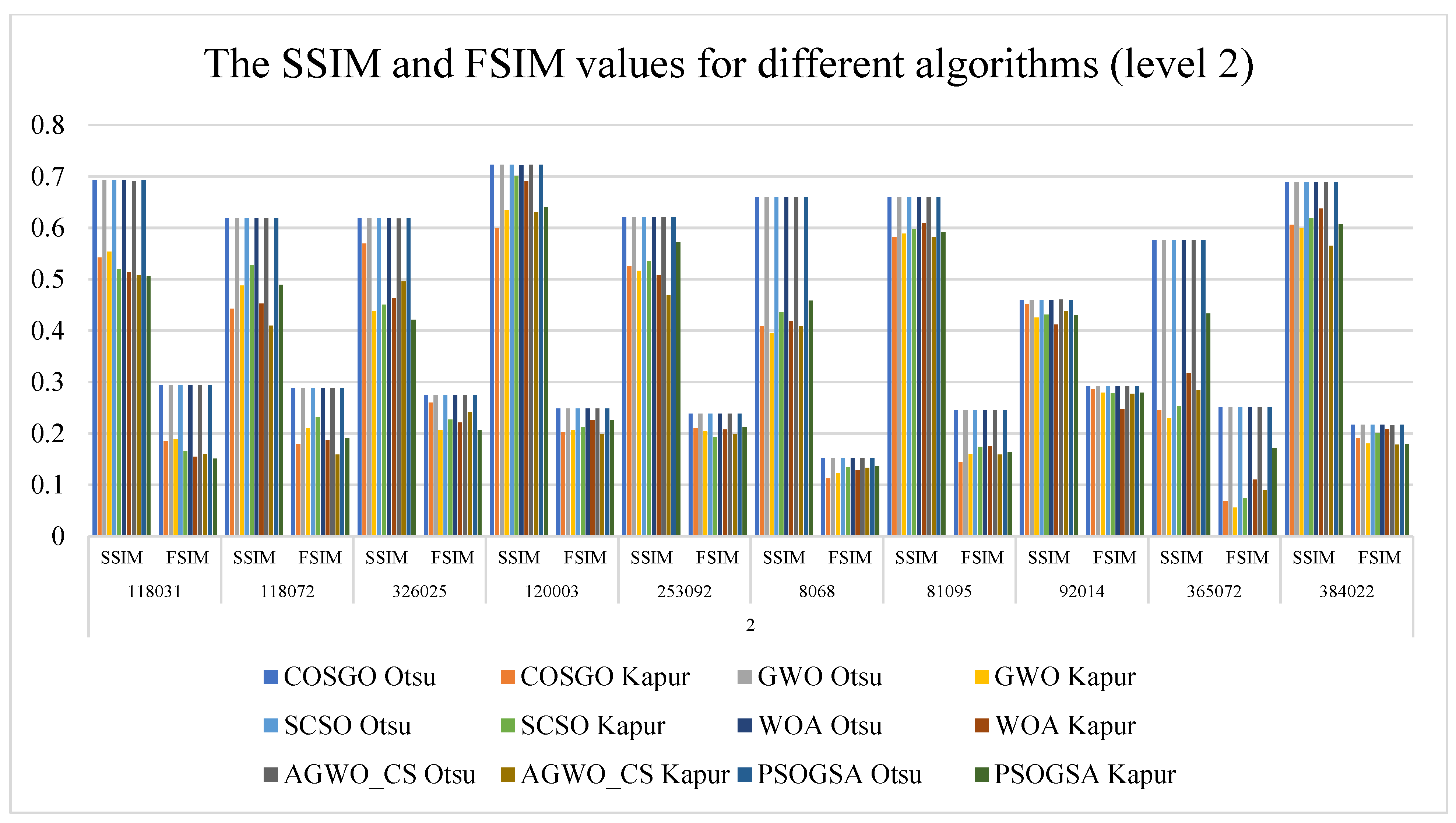
| 2 | 118031 | SSIM | 0.6929 | 0.5421 | 0.6929 | 0.5533 | 0.6929 | 0.5196 | 0.6928 | 0.5139 | 0.6914 | 0.5079 | 0.6929 | 0.5061 |
| FSIM | 0.2940 | 0.1850 | 0.2940 | 0.1880 | 0.2940 | 0.1657 | 0.2939 | 0.1546 | 0.2934 | 0.1595 | 0.2940 | 0.1507 | ||
| 118072 | SSIM | 0.6188 | 0.4424 | 0.6188 | 0.4880 | 0.6188 | 0.5280 | 0.6188 | 0.4528 | 0.6188 | 0.4095 | 0.6188 | 0.4891 | |
| FSIM | 0.2884 | 0.1795 | 0.2884 | 0.2099 | 0.2884 | 0.2310 | 0.2886 | 0.1866 | 0.2889 | 0.1587 | 0.2884 | 0.1906 | ||
| 326025 | SSIM | 0.6185 | 0.5693 | 0.6185 | 0.4385 | 0.6185 | 0.4504 | 0.6185 | 0.4638 | 0.6179 | 0.4957 | 0.6185 | 0.4215 | |
| FSIM | 0.2750 | 0.2596 | 0.2750 | 0.2068 | 0.2750 | 0.2267 | 0.2749 | 0.2212 | 0.2744 | 0.2418 | 0.2750 | 0.2058 | ||
| 120003 | SSIM | 0.7224 | 0.5991 | 0.7224 | 0.6345 | 0.7224 | 0.7003 | 0.7222 | 0.6900 | 0.7223 | 0.6302 | 0.7224 | 0.6400 | |
| FSIM | 0.2486 | 0.2017 | 0.2486 | 0.2066 | 0.2486 | 0.2126 | 0.2487 | 0.2256 | 0.2487 | 0.1988 | 0.2486 | 0.2258 | ||
| 253092 | SSIM | 0.6207 | 0.5251 | 0.6204 | 0.5164 | 0.6207 | 0.5360 | 0.6206 | 0.5077 | 0.6200 | 0.4693 | 0.6207 | 0.5718 | |
| FSIM | 0.2382 | 0.2104 | 0.2381 | 0.2039 | 0.2382 | 0.1926 | 0.2382 | 0.2076 | 0.2381 | 0.1985 | 0.2382 | 0.2117 | ||
| 8068 | SSIM | 0.6597 | 0.4088 | 0.6597 | 0.3951 | 0.6597 | 0.4357 | 0.6597 | 0.4190 | 0.6597 | 0.4091 | 0.6597 | 0.4586 | |
| FSIM | 0.1519 | 0.1122 | 0.1519 | 0.1222 | 0.1519 | 0.1340 | 0.1520 | 0.1278 | 0.1520 | 0.1331 | 0.1519 | 0.1357 | ||
| 81095 | SSIM | 0.6595 | 0.5813 | 0.6595 | 0.5884 | 0.6595 | 0.5971 | 0.6595 | 0.6088 | 0.6594 | 0.5811 | 0.6595 | 0.5911 | |
| FSIM | 0.2454 | 0.1447 | 0.2454 | 0.1595 | 0.2454 | 0.1739 | 0.2454 | 0.1746 | 0.2455 | 0.1591 | 0.2454 | 0.1629 | ||
| 92014 | SSIM | 0.4599 | 0.4518 | 0.4599 | 0.4252 | 0.4599 | 0.4311 | 0.4602 | 0.4120 | 0.4605 | 0.4376 | 0.4599 | 0.4295 | |
| FSIM | 0.2915 | 0.2856 | 0.2915 | 0.2794 | 0.2915 | 0.2787 | 0.2915 | 0.2479 | 0.2912 | 0.2772 | 0.2915 | 0.2794 | ||
| 365072 | SSIM | 0.5763 | 0.2447 | 0.5763 | 0.2289 | 0.5763 | 0.2529 | 0.5763 | 0.3175 | 0.5762 | 0.2845 | 0.5763 | 0.4335 | |
| FSIM | 0.2507 | 0.0686 | 0.2507 | 0.0555 | 0.2507 | 0.0742 | 0.2507 | 0.1098 | 0.2504 | 0.0893 | 0.2507 | 0.1712 | ||
| 384022 | SSIM | 0.6890 | 0.6061 | 0.6890 | 0.5992 | 0.6890 | 0.6185 | 0.6888 | 0.6375 | 0.6887 | 0.5652 | 0.6890 | 0.6073 | |
| FSIM | 0.2167 | 0.1901 | 0.2167 | 0.1801 | 0.2167 | 0.2012 | 0.2167 | 0.2086 | 0.2159 | 0.1779 | 0.2167 | 0.1790 | ||
| 3 | 118031 | SSIM | 0.7799 | 0.4921 | 0.7800 | 0.5559 | 0.7799 | 0.6644 | 0.7807 | 0.5536 | 0.7799 | 0.5898 | 0.7799 | 0.5601 |
| FSIM | 0.3657 | 0.1477 | 0.3654 | 0.1896 | 0.3657 | 0.2854 | 0.3661 | 0.1932 | 0.3661 | 0.2298 | 0.3657 | 0.2006 | ||
| 118072 | SSIM | 0.7114 | 0.5245 | 0.7114 | 0.5536 | 0.7115 | 0.5900 | 0.7116 | 0.5410 | 0.7114 | 0.5227 | 0.7114 | 0.5292 | |
| FSIM | 0.3764 | 0.2133 | 0.3764 | 0.2387 | 0.3764 | 0.2664 | 0.3765 | 0.2422 | 0.3762 | 0.2282 | 0.3764 | 0.2315 | ||
| 326025 | SSIM | 0.6949 | 0.5779 | 0.6949 | 0.5488 | 0.6948 | 0.5800 | 0.6943 | 0.5480 | 0.6934 | 0.5941 | 0.6949 | 0.5332 | |
| FSIM | 0.3420 | 0.2748 | 0.3420 | 0.2564 | 0.3419 | 0.2776 | 0.3417 | 0.2682 | 0.3419 | 0.2947 | 0.3420 | 0.2520 | ||
| 120003 | SSIM | 0.7804 | 0.6609 | 0.7807 | 0.6761 | 0.7805 | 0.6989 | 0.7805 | 0.7075 | 0.7794 | 0.7071 | 0.7804 | 0.6996 | |
| FSIM | 0.2816 | 0.2267 | 0.2817 | 0.2318 | 0.2817 | 0.2438 | 0.2817 | 0.2376 | 0.2816 | 0.2257 | 0.2816 | 0.2514 | ||
| 253092 | SSIM | 0.6424 | 0.5250 | 0.6422 | 0.5604 | 0.6424 | 0.5597 | 0.6425 | 0.5621 | 0.6419 | 0.5574 | 0.6424 | 0.5635 | |
| FSIM | 0.2914 | 0.1965 | 0.2920 | 0.2379 | 0.2914 | 0.2372 | 0.2915 | 0.2068 | 0.2906 | 0.2369 | 0.2914 | 0.2186 | ||
| 8068 | SSIM | 0.6826 | 0.4258 | 0.6826 | 0.4713 | 0.6826 | 0.4549 | 0.6829 | 0.4415 | 0.6830 | 0.4060 | 0.6826 | 0.4437 | |
| FSIM | 0.1769 | 0.1364 | 0.1769 | 0.1620 | 0.1769 | 0.1364 | 0.1771 | 0.1224 | 0.1777 | 0.1157 | 0.1769 | 0.1582 | ||
| 81095 | SSIM | 0.7343 | 0.5850 | 0.7346 | 0.5823 | 0.7344 | 0.6016 | 0.7340 | 0.6334 | 0.7347 | 0.5932 | 0.7343 | 0.6395 | |
| FSIM | 0.2989 | 0.1477 | 0.2991 | 0.1550 | 0.2989 | 0.1742 | 0.2988 | 0.2092 | 0.2977 | 0.1732 | 0.2989 | 0.2195 | ||
| 92014 | SSIM | 0.5434 | 0.4970 | 0.5434 | 0.5062 | 0.5433 | 0.4645 | 0.5431 | 0.4666 | 0.5422 | 0.5351 | 0.5433 | 0.4583 | |
| FSIM | 0.3791 | 0.3279 | 0.3785 | 0.3139 | 0.3785 | 0.3075 | 0.3782 | 0.3088 | 0.3801 | 0.3602 | 0.3786 | 0.2978 | ||
| 365072 | SSIM | 0.6767 | 0.2648 | 0.6767 | 0.3720 | 0.6767 | 0.3314 | 0.6765 | 0.2267 | 0.6771 | 0.3965 | 0.6767 | 0.5367 | |
| FSIM | 0.3437 | 0.0821 | 0.3437 | 0.1403 | 0.3436 | 0.1263 | 0.3437 | 0.0575 | 0.3430 | 0.1620 | 0.3437 | 0.2575 | ||
| 384022 | SSIM | 0.7331 | 0.5930 | 0.7331 | 0.6193 | 0.7331 | 0.6481 | 0.7331 | 0.6122 | 0.7337 | 0.6202 | 0.7331 | 0.6317 | |
| FSIM | 0.2655 | 0.1636 | 0.2655 | 0.2153 | 0.2655 | 0.2219 | 0.2656 | 0.1827 | 0.2661 | 0.2270 | 0.2655 | 0.2186 | ||
| 4 | 118031 | SSIM | 0.8091 | 0.5763 | 0.8091 | 0.6388 | 0.8087 | 0.6033 | 0.8088 | 0.5841 | 0.8091 | 0.5256 | 0.8090 | 0.6160 |
| FSIM | 0.4271 | 0.1933 | 0.4274 | 0.2584 | 0.4275 | 0.2255 | 0.4270 | 0.1985 | 0.4265 | 0.1845 | 0.4274 | 0.2529 | ||
| 118072 | SSIM | 0.7726 | 0.5478 | 0.7712 | 0.6395 | 0.7719 | 0.5693 | 0.7724 | 0.6018 | 0.7701 | 0.6233 | 0.7720 | 0.5608 | |
| FSIM | 0.4487 | 0.2572 | 0.4480 | 0.3116 | 0.4483 | 0.2569 | 0.4486 | 0.2829 | 0.4465 | 0.3167 | 0.4485 | 0.2620 | ||
| 326025 | SSIM | 0.7630 | 0.6302 | 0.7630 | 0.5599 | 0.7631 | 0.6022 | 0.7625 | 0.6105 | 0.7622 | 0.5289 | 0.7631 | 0.5469 | |
| FSIM | 0.4012 | 0.3053 | 0.4012 | 0.2695 | 0.4014 | 0.3037 | 0.4010 | 0.3044 | 0.4008 | 0.2752 | 0.4014 | 0.2654 | ||
| 120003 | SSIM | 0.7857 | 0.6343 | 0.7848 | 0.7208 | 0.7846 | 0.7198 | 0.7844 | 0.7311 | 0.7860 | 0.6679 | 0.7849 | 0.6765 | |
| FSIM | 0.3042 | 0.2303 | 0.3047 | 0.2695 | 0.3046 | 0.2480 | 0.3049 | 0.2621 | 0.3111 | 0.2175 | 0.3046 | 0.2526 | ||
| 253092 | SSIM | 0.6774 | 0.5709 | 0.6775 | 0.6138 | 0.6774 | 0.6208 | 0.6776 | 0.5475 | 0.6772 | 0.5458 | 0.6772 | 0.5887 | |
| FSIM | 0.3402 | 0.2303 | 0.3399 | 0.2630 | 0.3401 | 0.2554 | 0.3403 | 0.2174 | 0.3394 | 0.2141 | 0.3400 | 0.2291 | ||
| 8068 | SSIM | 0.6587 | 0.4305 | 0.6587 | 0.4561 | 0.6586 | 0.5285 | 0.6619 | 0.4454 | 0.6567 | 0.3812 | 0.6648 | 0.4835 | |
| FSIM | 0.3118 | 0.1277 | 0.3118 | 0.1609 | 0.3118 | 0.1635 | 0.3128 | 0.1282 | 0.3106 | 0.1406 | 0.2889 | 0.1552 | ||
| 81095 | SSIM | 0.7626 | 0.6011 | 0.7623 | 0.6673 | 0.7625 | 0.6171 | 0.7621 | 0.6556 | 0.7612 | 0.6030 | 0.7626 | 0.6287 | |
| FSIM | 0.3406 | 0.1691 | 0.3404 | 0.2625 | 0.3407 | 0.1921 | 0.3402 | 0.2357 | 0.3385 | 0.1876 | 0.3406 | 0.2028 | ||
| 92014 | SSIM | 0.6157 | 0.4900 | 0.6155 | 0.5324 | 0.6159 | 0.5521 | 0.6158 | 0.4787 | 0.6136 | 0.5404 | 0.6149 | 0.5047 | |
| FSIM | 0.4472 | 0.3242 | 0.4469 | 0.3464 | 0.4475 | 0.3552 | 0.4473 | 0.3164 | 0.4443 | 0.3784 | 0.4466 | 0.3290 | ||
| 365072 | SSIM | 0.7510 | 0.2413 | 0.7508 | 0.4616 | 0.7509 | 0.3474 | 0.7510 | 0.4534 | 0.7506 | 0.3174 | 0.7509 | 0.4956 | |
| FSIM | 0.4279 | 0.0688 | 0.4278 | 0.1946 | 0.4277 | 0.1383 | 0.4278 | 0.2064 | 0.4277 | 0.1211 | 0.4278 | 0.2445 | ||
| 384022 | SSIM | 0.7924 | 0.6092 | 0.7920 | 0.6482 | 0.7797 | 0.6696 | 0.7894 | 0.6338 | 0.7903 | 0.6168 | 0.7856 | 0.6756 | |
| FSIM | 0.3903 | 0.2026 | 0.3900 | 0.2371 | 0.3649 | 0.2754 | 0.3887 | 0.2434 | 0.3875 | 0.2491 | 0.3713 | 0.2970 | ||
| 5 | 118031 | SSIM | 0.8395 | 0.6154 | 0.8387 | 0.7160 | 0.8334 | 0.7094 | 0.8398 | 0.6402 | 0.8395 | 0.6154 | 0.8387 | 0.7160 |
| FSIM | 0.4763 | 0.2464 | 0.4753 | 0.3365 | 0.4664 | 0.3278 | 0.4764 | 0.2594 | 0.4763 | 0.2464 | 0.4753 | 0.3365 | ||
| 118072 | SSIM | 0.8122 | 0.6165 | 0.8120 | 0.6296 | 0.8042 | 0.6322 | 0.8127 | 0.6016 | 0.8122 | 0.6165 | 0.8120 | 0.6296 | |
| FSIM | 0.5033 | 0.3023 | 0.5029 | 0.3116 | 0.4925 | 0.3316 | 0.5025 | 0.3046 | 0.5033 | 0.3023 | 0.5029 | 0.3116 | ||
| 326025 | SSIM | 0.8134 | 0.5348 | 0.8128 | 0.6301 | 0.8132 | 0.6167 | 0.8124 | 0.5774 | 0.8134 | 0.5348 | 0.8128 | 0.6301 | |
| FSIM | 0.4531 | 0.2606 | 0.4523 | 0.3083 | 0.4528 | 0.3086 | 0.4521 | 0.2867 | 0.4531 | 0.2606 | 0.4523 | 0.3083 | ||
| 120003 | SSIM | 0.8120 | 0.6719 | 0.8133 | 0.6995 | 0.8130 | 0.7228 | 0.8132 | 0.7207 | 0.8120 | 0.6719 | 0.8133 | 0.6995 | |
| FSIM | 0.3363 | 0.2490 | 0.3372 | 0.2632 | 0.3369 | 0.2588 | 0.3361 | 0.2514 | 0.3363 | 0.2490 | 0.3372 | 0.2632 | ||
| 253092 | SSIM | 0.7084 | 0.6279 | 0.7070 | 0.6101 | 0.7087 | 0.6317 | 0.7079 | 0.6452 | 0.7084 | 0.6279 | 0.7070 | 0.6101 | |
| FSIM | 0.3793 | 0.2801 | 0.3786 | 0.2604 | 0.3790 | 0.2708 | 0.3727 | 0.2590 | 0.3793 | 0.2801 | 0.3786 | 0.2604 | ||
| 8068 | SSIM | 0.6687 | 0.4700 | 0.6738 | 0.6228 | 0.6685 | 0.5219 | 0.6660 | 0.4685 | 0.6687 | 0.4700 | 0.6738 | 0.6228 | |
| FSIM | 0.3303 | 0.1374 | 0.3288 | 0.1845 | 0.3298 | 0.2212 | 0.3296 | 0.1457 | 0.3303 | 0.1374 | 0.3288 | 0.1845 | ||
| 81095 | SSIM | 0.7926 | 0.5921 | 0.7923 | 0.6331 | 0.7873 | 0.6778 | 0.7927 | 0.6838 | 0.7926 | 0.5921 | 0.7923 | 0.6331 | |
| FSIM | 0.3796 | 0.1602 | 0.3802 | 0.2173 | 0.3721 | 0.2640 | 0.3786 | 0.2652 | 0.3796 | 0.1602 | 0.3802 | 0.2173 | ||
| 92014 | SSIM | 0.6517 | 0.5027 | 0.6460 | 0.4980 | 0.6550 | 0.5219 | 0.6511 | 0.5497 | 0.6517 | 0.5027 | 0.6460 | 0.4980 | |
| FSIM | 0.5040 | 0.3392 | 0.4993 | 0.3236 | 0.5069 | 0.3398 | 0.5033 | 0.3755 | 0.5040 | 0.3392 | 0.4993 | 0.3236 | ||
| 365072 | SSIM | 0.8041 | 0.3094 | 0.8040 | 0.5740 | 0.8044 | 0.3850 | 0.8037 | 0.3905 | 0.8041 | 0.3094 | 0.8040 | 0.5740 | |
| FSIM | 0.4900 | 0.1134 | 0.4903 | 0.2870 | 0.4907 | 0.1630 | 0.4894 | 0.1639 | 0.4900 | 0.1134 | 0.4903 | 0.2870 | ||
| 384022 | SSIM | 0.8167 | 0.6448 | 0.8178 | 0.6815 | 0.8167 | 0.6675 | 0.8148 | 0.6324 | 0.8167 | 0.6448 | 0.8178 | 0.6815 | |
| FSIM | 0.4212 | 0.2337 | 0.4247 | 0.2641 | 0.4211 | 0.2740 | 0.4229 | 0.2411 | 0.4212 | 0.2337 | 0.4247 | 0.2641 | ||
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | |||
| 2 | 118031 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 118072 | Dice | 0.4398 | 0.0685 | 0.4398 | 0.1109 | 0.4398 | 0.3996 | 0.4398 | 0.1181 | 0.4413 | 0.6776 | 0.4398 | 0.4003 | |
| Jaccard | 0.2819 | 0.0394 | 0.2819 | 0.0610 | 0.2819 | 0.2867 | 0.2819 | 0.0708 | 0.2831 | 0.5871 | 0.2819 | 0.3060 | ||
| 326025 | Dice | 0.1742 | 0.1537 | 0.1742 | 0.1175 | 0.1742 | 0.4232 | 0.1737 | 0.2987 | 0.1707 | 0.4385 | 0.1742 | 0.0676 | |
| Jaccard | 0.0954 | 0.0857 | 0.0954 | 0.0626 | 0.0954 | 0.3002 | 0.0951 | 0.1918 | 0.0933 | 0.3096 | 0.0954 | 0.0357 | ||
| 120003 | Dice | 0.5013 | 0.1165 | 0.5013 | 0.5108 | 0.5013 | 0.8966 | 0.5013 | 0.7504 | 0.5036 | 0.9373 | 0.5013 | 0.4133 | |
| Jaccard | 0.3344 | 0.0679 | 0.3344 | 0.4155 | 0.3344 | 0.8126 | 0.3344 | 0.6331 | 0.3365 | 0.8863 | 0.3344 | 0.2755 | ||
| 253092 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 8068 | Dice | 0.2835 | 0.1693 | 0.2835 | 0.1878 | 0.2835 | 0.2080 | 0.2835 | 0.3133 | 0.2835 | 0.4783 | 0.2835 | 0.2166 | |
| Jaccard | 0.1652 | 0.0928 | 0.1652 | 0.1037 | 0.1652 | 0.1165 | 0.1652 | 0.2326 | 0.1652 | 0.3980 | 0.1652 | 0.1219 | ||
| 81095 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 92014 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 365072 | Dice | 0.4339 | 0.0785 | 0.4339 | 0.0783 | 0.4339 | 0.0992 | 0.4339 | 0.2734 | 0.4338 | 0.6731 | 0.4339 | 0.2790 | |
| Jaccard | 0.2771 | 0.0429 | 0.2771 | 0.0426 | 0.2771 | 0.0542 | 0.2771 | 0.1755 | 0.2770 | 0.6398 | 0.2771 | 0.1670 | ||
| 384022 | Dice | 0.5636 | 0.1131 | 0.5636 | 0.2598 | 0.5636 | 0.2914 | 0.5641 | 0.1617 | 0.5636 | 0.7277 | 0.5636 | 0.2853 | |
| Jaccard | 0.3923 | 0.0617 | 0.3923 | 0.2079 | 0.3923 | 0.2170 | 0.3929 | 0.0892 | 0.3923 | 0.6345 | 0.3923 | 0.2280 | ||
| 3 | 118031 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 118072 | Dice | 0.3193 | 0.0049 | 0.3193 | 0.0372 | 0.3193 | 0.0803 | 0.3193 | 0.0568 | 0.3159 | 0.4178 | 0.3193 | 0.1969 | |
| Jaccard | 0.1900 | 0.0025 | 0.1900 | 0.0193 | 0.1900 | 0.0448 | 0.1900 | 0.0329 | 0.1877 | 0.3343 | 0.1900 | 0.1485 | ||
| 326025 | Dice | 0.1215 | 0.2055 | 0.1215 | 0.1100 | 0.1212 | 0.1149 | 0.1212 | 0.1964 | 0.1192 | 0.3547 | 0.1215 | 0.0971 | |
| Jaccard | 0.0647 | 0.1224 | 0.0647 | 0.0586 | 0.0645 | 0.0631 | 0.0645 | 0.1281 | 0.0634 | 0.2262 | 0.0647 | 0.0516 | ||
| 120003 | Dice | 0.4536 | 0.0578 | 0.4536 | 0.1417 | 0.4536 | 0.2036 | 0.4536 | 0.7026 | 0.4516 | 0.8944 | 0.4536 | 0.3224 | |
| Jaccard | 0.2933 | 0.0298 | 0.2933 | 0.0859 | 0.2933 | 0.1182 | 0.2933 | 0.5937 | 0.2917 | 0.8091 | 0.2933 | 0.2086 | ||
| 253092 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 8068 | Dice | 0.2664 | 0.1334 | 0.2664 | 0.2150 | 0.2664 | 0.2223 | 0.2664 | 0.1884 | 0.2666 | 0.4935 | 0.2664 | 0.1945 | |
| Jaccard | 0.1537 | 0.0715 | 0.1537 | 0.1219 | 0.1537 | 0.1260 | 0.1537 | 0.1042 | 0.1538 | 0.4425 | 0.1537 | 0.1085 | ||
| 81095 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 92014 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 365072 | Dice | 0.3283 | 0.0372 | 0.3283 | 0.1340 | 0.3283 | 0.1491 | 0.3291 | 0.0313 | 0.3234 | 0.1742 | 0.3283 | 0.3767 | |
| Jaccard | 0.1964 | 0.0196 | 0.1964 | 0.0847 | 0.1964 | 0.1014 | 0.1970 | 0.0161 | 0.1929 | 0.1043 | 0.1964 | 0.2438 | ||
| 384022 | Dice | 0.2029 | 0.0299 | 0.2029 | 0.0989 | 0.2029 | 0.1251 | 0.2020 | 0.0458 | 0.2078 | 0.6233 | 0.2029 | 0.0624 | |
| Jaccard | 0.1129 | 0.0153 | 0.1129 | 0.0529 | 0.1129 | 0.0675 | 0.1123 | 0.0236 | 0.1160 | 0.5076 | 0.1129 | 0.0325 | ||
| 4 | 118031 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 118072 | Dice | 0.2203 | 0.0565 | 0.2188 | 0.0818 | 0.2218 | 0.0179 | 0.2172 | 0.0117 | 0.2232 | 0.3537 | 0.2203 | 0.1650 | |
| Jaccard | 0.1238 | 0.0327 | 0.1228 | 0.0458 | 0.1247 | 0.0091 | 0.1219 | 0.0059 | 0.1256 | 0.2466 | 0.1238 | 0.1196 | ||
| 326025 | Dice | 0.1058 | 0.0491 | 0.1058 | 0.0841 | 0.1055 | 0.1440 | 0.1055 | 0.0816 | 0.1061 | 0.4591 | 0.1055 | 0.0835 | |
| Jaccard | 0.0558 | 0.0253 | 0.0558 | 0.0444 | 0.0557 | 0.0834 | 0.0557 | 0.0429 | 0.0561 | 0.3564 | 0.0557 | 0.0444 | ||
| 120003 | Dice | 0.3272 | 0.1262 | 0.3315 | 0.2263 | 0.3300 | 0.6132 | 0.3302 | 0.2667 | 0.3638 | 0.9171 | 0.3300 | 0.2370 | |
| Jaccard | 0.1956 | 0.0691 | 0.1987 | 0.1389 | 0.1976 | 0.5011 | 0.1978 | 0.1635 | 0.2228 | 0.8496 | 0.1976 | 0.1397 | ||
| 253092 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 8068 | Dice | 0.2645 | 0.1306 | 0.2645 | 0.1901 | 0.2643 | 0.2053 | 0.2650 | 0.1762 | 0.2632 | 0.6294 | 0.2549 | 0.1967 | |
| Jaccard | 0.1524 | 0.0699 | 0.1524 | 0.1053 | 0.1523 | 0.1159 | 0.1527 | 0.0975 | 0.1516 | 0.5654 | 0.1462 | 0.1097 | ||
| 81095 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 92014 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 365072 | Dice | 0.2651 | 0.0250 | 0.2669 | 0.2223 | 0.2669 | 0.0529 | 0.2642 | 0.1118 | 0.2574 | 0.4217 | 0.2660 | 0.1919 | |
| Jaccard | 0.1528 | 0.0129 | 0.1540 | 0.1331 | 0.1540 | 0.0281 | 0.1522 | 0.0628 | 0.1478 | 0.4042 | 0.1534 | 0.1292 | ||
| 384022 | Dice | 0.1930 | 0.0125 | 0.1902 | 0.1161 | 0.1957 | 0.1256 | 0.1921 | 0.1970 | 0.1927 | 0.6454 | 0.1738 | 0.1601 | |
| Jaccard | 0.1068 | 0.0063 | 0.1051 | 0.0637 | 0.1085 | 0.0722 | 0.1062 | 0.1615 | 0.1067 | 0.5135 | 0.0957 | 0.0940 | ||
| 5 | 118031 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 118072 | Dice | 0.1618 | 0.0338 | 0.1633 | 0.0311 | 0.1633 | 0.0377 | 0.1663 | 0.0108 | 0.1901 | 0.1550 | 0.1649 | 0.0082 | |
| Jaccard | 0.0880 | 0.0184 | 0.0889 | 0.0165 | 0.0889 | 0.0198 | 0.0907 | 0.0055 | 0.1053 | 0.0865 | 0.0898 | 0.0042 | ||
| 326025 | Dice | 0.0875 | 0.0366 | 0.0874 | 0.0720 | 0.0877 | 0.1240 | 0.0869 | 0.0304 | 0.0909 | 0.1805 | 0.0879 | 0.0787 | |
| Jaccard | 0.0457 | 0.0187 | 0.0457 | 0.0388 | 0.0458 | 0.0728 | 0.0454 | 0.0156 | 0.0476 | 0.1042 | 0.0460 | 0.0410 | ||
| 120003 | Dice | 0.2915 | 0.0998 | 0.2931 | 0.3265 | 0.2929 | 0.7665 | 0.2875 | 0.2988 | 0.2943 | 0.8929 | 0.2971 | 0.2040 | |
| Jaccard | 0.1706 | 0.0537 | 0.1717 | 0.2437 | 0.1716 | 0.6782 | 0.1679 | 0.2279 | 0.1730 | 0.8066 | 0.1745 | 0.1236 | ||
| 253092 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 8068 | Dice | 0.2119 | 0.1307 | 0.2106 | 0.2127 | 0.2113 | 0.2149 | 0.2143 | 0.2150 | 0.2045 | 0.4184 | 0.2119 | 0.2064 | |
| Jaccard | 0.1185 | 0.0706 | 0.1177 | 0.1207 | 0.1181 | 0.1215 | 0.1200 | 0.1211 | 0.1140 | 0.3532 | 0.1185 | 0.1159 | ||
| 81095 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 92014 | Dice | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| Jaccard | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | ||
| 365072 | Dice | 0.2315 | 0.0418 | 0.2287 | 0.1382 | 0.2324 | 0.0502 | 0.2342 | 0.0373 | 0.2501 | 0.3051 | 0.2315 | 0.2013 | |
| Jaccard | 0.1309 | 0.0217 | 0.1292 | 0.0843 | 0.1315 | 0.0262 | 0.1327 | 0.0196 | 0.1431 | 0.2488 | 0.1309 | 0.1191 | ||
| 384022 | Dice | 0.0923 | 0.0440 | 0.0913 | 0.1413 | 0.0910 | 0.1359 | 0.1112 | 0.0142 | 0.0963 | 0.4080 | 0.0916 | 0.1170 | |
| Jaccard | 0.0484 | 0.0228 | 0.0478 | 0.0772 | 0.0477 | 0.0748 | 0.0593 | 0.0071 | 0.0506 | 0.3274 | 0.0480 | 0.0637 | ||
| Level | Image | COSGO | GWO | SCSO | WOA | AGWO_CS | PSOGSA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | Otsu | Kapur | ||
| 2 | 118031 | 0.9079 | 0.8720 | 0.9079 | 0.9299 | 0.9079 | 0.9558 | 0.9078 | 0.9468 | 0.9075 | 0.5480 | 0.9079 | 0.9297 |
| 118072 | 0.2819 | 0.0394 | 0.2819 | 0.0610 | 0.2819 | 0.2867 | 0.2819 | 0.0708 | 0.2831 | 0.5871 | 0.2819 | 0.3060 | |
| 326025 | 0.0954 | 0.0857 | 0.0954 | 0.0626 | 0.0954 | 0.3002 | 0.0951 | 0.1918 | 0.0933 | 0.3096 | 0.0954 | 0.0357 | |
| 120003 | 0.3344 | 0.0679 | 0.3344 | 0.4155 | 0.3344 | 0.8126 | 0.3344 | 0.6331 | 0.3365 | 0.8863 | 0.3344 | 0.2755 | |
| 253092 | 0.8717 | 0.8214 | 0.8722 | 0.7572 | 0.8717 | 0.8516 | 0.8717 | 0.6697 | 0.8727 | 0.5685 | 0.8717 | 0.9111 | |
| 8068 | 0.1652 | 0.0928 | 0.1652 | 0.1037 | 0.1652 | 0.1165 | 0.1652 | 0.2326 | 0.1652 | 0.3980 | 0.1652 | 0.1219 | |
| 81095 | 0.7998 | 0.9898 | 0.7998 | 0.9911 | 0.7998 | 0.9342 | 0.7998 | 0.9858 | 0.7988 | 0.4300 | 0.7998 | 0.9897 | |
| 92014 | 0.8781 | 0.8340 | 0.8781 | 0.7775 | 0.8781 | 0.8981 | 0.8781 | 0.7017 | 0.8781 | 0.7675 | 0.8781 | 0.7659 | |
| 365072 | 0.2771 | 0.0429 | 0.2771 | 0.0426 | 0.2771 | 0.0542 | 0.2771 | 0.1755 | 0.2770 | 0.6398 | 0.2771 | 0.1670 | |
| 384022 | 0.3923 | 0.0617 | 0.3923 | 0.2079 | 0.3923 | 0.2170 | 0.3929 | 0.0892 | 0.3923 | 0.6345 | 0.3923 | 0.2280 | |
| 3 | 118031 | 0.9173 | 0.9430 | 0.9176 | 0.9146 | 0.9173 | 0.8150 | 0.9168 | 0.9244 | 0.9168 | 0.9202 | 0.9173 | 0.9382 |
| 118072 | 0.1900 | 0.0025 | 0.1900 | 0.0193 | 0.1900 | 0.0448 | 0.1900 | 0.0329 | 0.1877 | 0.3343 | 0.1900 | 0.1485 | |
| 326025 | 0.0647 | 0.1224 | 0.0647 | 0.0586 | 0.0645 | 0.0631 | 0.0645 | 0.1281 | 0.0634 | 0.2262 | 0.0647 | 0.0516 | |
| 120003 | 0.2933 | 0.0298 | 0.2933 | 0.0859 | 0.2933 | 0.1182 | 0.2933 | 0.5937 | 0.2917 | 0.8091 | 0.2933 | 0.2086 | |
| 253092 | 0.9062 | 0.9282 | 0.9033 | 0.9118 | 0.9062 | 0.9134 | 0.9062 | 0.9293 | 0.9057 | 0.7059 | 0.9062 | 0.9261 | |
| 8068 | 0.1537 | 0.0715 | 0.1537 | 0.1219 | 0.1537 | 0.1260 | 0.1537 | 0.1042 | 0.1538 | 0.4425 | 0.1537 | 0.1085 | |
| 81095 | 0.8412 | 0.9959 | 0.8412 | 0.7968 | 0.8420 | 0.7980 | 0.8428 | 0.9389 | 0.8481 | 0.7754 | 0.8412 | 0.9752 | |
| 92014 | 0.8860 | 0.8846 | 0.8857 | 0.8871 | 0.8863 | 0.7606 | 0.8863 | 0.8934 | 0.8863 | 0.8558 | 0.8861 | 0.8921 | |
| 365072 | 0.1964 | 0.0196 | 0.1964 | 0.0847 | 0.1964 | 0.1014 | 0.1970 | 0.0161 | 0.1929 | 0.1043 | 0.1964 | 0.2438 | |
| 384022 | 0.1129 | 0.0153 | 0.1129 | 0.0529 | 0.1129 | 0.0675 | 0.1123 | 0.0236 | 0.1160 | 0.5076 | 0.1129 | 0.0325 | |
| 4 | 118031 | 0.9212 | 0.9545 | 0.9211 | 0.9068 | 0.9214 | 0.9288 | 0.9214 | 0.9372 | 0.9207 | 0.7522 | 0.9212 | 0.9349 |
| 118072 | 0.1238 | 0.0327 | 0.1228 | 0.0458 | 0.1247 | 0.0091 | 0.1219 | 0.0059 | 0.1256 | 0.2466 | 0.1238 | 0.1196 | |
| 326025 | 0.0558 | 0.0253 | 0.0558 | 0.0444 | 0.0557 | 0.0834 | 0.0557 | 0.0429 | 0.0561 | 0.3564 | 0.0557 | 0.0444 | |
| 120003 | 0.1956 | 0.0691 | 0.1987 | 0.1389 | 0.1976 | 0.5011 | 0.1978 | 0.1635 | 0.2228 | 0.8496 | 0.1976 | 0.1397 | |
| 253092 | 0.9199 | 0.9246 | 0.9194 | 0.9340 | 0.9199 | 0.9254 | 0.9194 | 0.8374 | 0.9204 | 0.7524 | 0.9202 | 0.9118 | |
| 8068 | 0.1524 | 0.0699 | 0.1524 | 0.1053 | 0.1523 | 0.1159 | 0.1527 | 0.0975 | 0.1516 | 0.5654 | 0.1462 | 0.1097 | |
| 81095 | 0.8619 | 0.9968 | 0.8631 | 0.9542 | 0.8625 | 0.9973 | 0.8632 | 0.9716 | 0.8618 | 0.5212 | 0.8619 | 0.8155 | |
| 92014 | 0.8945 | 0.9152 | 0.8943 | 0.8838 | 0.8945 | 0.8903 | 0.8945 | 0.8433 | 0.8955 | 0.8454 | 0.8948 | 0.8886 | |
| 365072 | 0.1528 | 0.0129 | 0.1540 | 0.1331 | 0.1540 | 0.0281 | 0.1522 | 0.0628 | 0.1478 | 0.4042 | 0.1534 | 0.1292 | |
| 384022 | 0.1068 | 0.0063 | 0.1051 | 0.0637 | 0.1085 | 0.0722 | 0.1062 | 0.1615 | 0.1067 | 0.5135 | 0.0957 | 0.0940 | |
| 5 | 118031 | 0.9237 | 0.9744 | 0.9262 | 0.9121 | 0.9239 | 0.9438 | 0.9234 | 0.9098 | 0.9247 | 0.9265 | 0.9240 | 0.9150 |
| 118072 | 0.0880 | 0.0184 | 0.0889 | 0.0165 | 0.0889 | 0.0198 | 0.0907 | 0.0055 | 0.1053 | 0.0865 | 0.0898 | 0.0042 | |
| 326025 | 0.0457 | 0.0187 | 0.0457 | 0.0388 | 0.0458 | 0.0728 | 0.0454 | 0.0156 | 0.0476 | 0.1042 | 0.0460 | 0.0410 | |
| 120003 | 0.1706 | 0.0537 | 0.1717 | 0.2437 | 0.1716 | 0.6782 | 0.1679 | 0.2279 | 0.1730 | 0.8066 | 0.1745 | 0.1236 | |
| 253092 | 0.9298 | 0.9589 | 0.9298 | 0.9390 | 0.9294 | 0.7943 | 0.9279 | 0.9153 | 0.9348 | 0.7211 | 0.9397 | 0.9135 | |
| 8068 | 0.1185 | 0.0706 | 0.1177 | 0.1207 | 0.1181 | 0.1215 | 0.1200 | 0.1211 | 0.1140 | 0.3532 | 0.1185 | 0.1159 | |
| 81095 | 0.9047 | 0.9978 | 0.9053 | 0.9824 | 0.9034 | 0.9726 | 0.9021 | 0.9366 | 0.8826 | 0.2147 | 0.8948 | 0.9511 | |
| 92014 | 0.9000 | 0.9309 | 0.9007 | 0.9138 | 0.9003 | 0.9137 | 0.8996 | 0.9123 | 0.9029 | 0.8596 | 0.9014 | 0.9049 | |
| 365072 | 0.1309 | 0.0217 | 0.1292 | 0.0843 | 0.1315 | 0.0262 | 0.1327 | 0.0196 | 0.1431 | 0.2488 | 0.1309 | 0.1191 | |
| 384022 | 0.0484 | 0.0228 | 0.0478 | 0.0772 | 0.0477 | 0.0748 | 0.0593 | 0.0071 | 0.0506 | 0.3274 | 0.0480 | 0.0637 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seyyedabbasi, A. A Hybrid Multi-Strategy Optimization Metaheuristic Algorithm for Multi-Level Thresholding Color Image Segmentation. Appl. Sci. 2025, 15, 7255. https://doi.org/10.3390/app15137255
Seyyedabbasi A. A Hybrid Multi-Strategy Optimization Metaheuristic Algorithm for Multi-Level Thresholding Color Image Segmentation. Applied Sciences. 2025; 15(13):7255. https://doi.org/10.3390/app15137255
Chicago/Turabian StyleSeyyedabbasi, Amir. 2025. "A Hybrid Multi-Strategy Optimization Metaheuristic Algorithm for Multi-Level Thresholding Color Image Segmentation" Applied Sciences 15, no. 13: 7255. https://doi.org/10.3390/app15137255
APA StyleSeyyedabbasi, A. (2025). A Hybrid Multi-Strategy Optimization Metaheuristic Algorithm for Multi-Level Thresholding Color Image Segmentation. Applied Sciences, 15(13), 7255. https://doi.org/10.3390/app15137255