Author Contributions
Conceptualization, M.J.J.-M. and M.Z.H.; methodology, M.J.J.-M. and M.Z.H.; software, M.J.J.-M.; validation, M.J.J.-M., M.Z.H., Á.M.F. and A.A.J.; formal analysis, M.J.J.-M., M.Z.H., Á.M.F. and A.A.J.; investigation, M.J.J.-M., M.Z.H., Á.M.F. and A.A.J.; resources, M.J.J.-M. and M.Z.H.; data curation, M.J.J.-M. and M.Z.H.; writing—original draft preparation, M.J.J.-M.; writing—review and editing, M.J.J.-M., M.Z.H., Á.M.F. and A.A.J.; visualization, M.J.J.-M., Á.M.F. and A.A.J.; supervision, M.J.J.-M., M.Z.H., Á.M.F. and A.A.J.; project administration, Á.M.F. and A.A.J.; funding acquisition, M.Z.H., Á.M.F. and A.A.J. All authors have read and agreed to the published version of the manuscript.
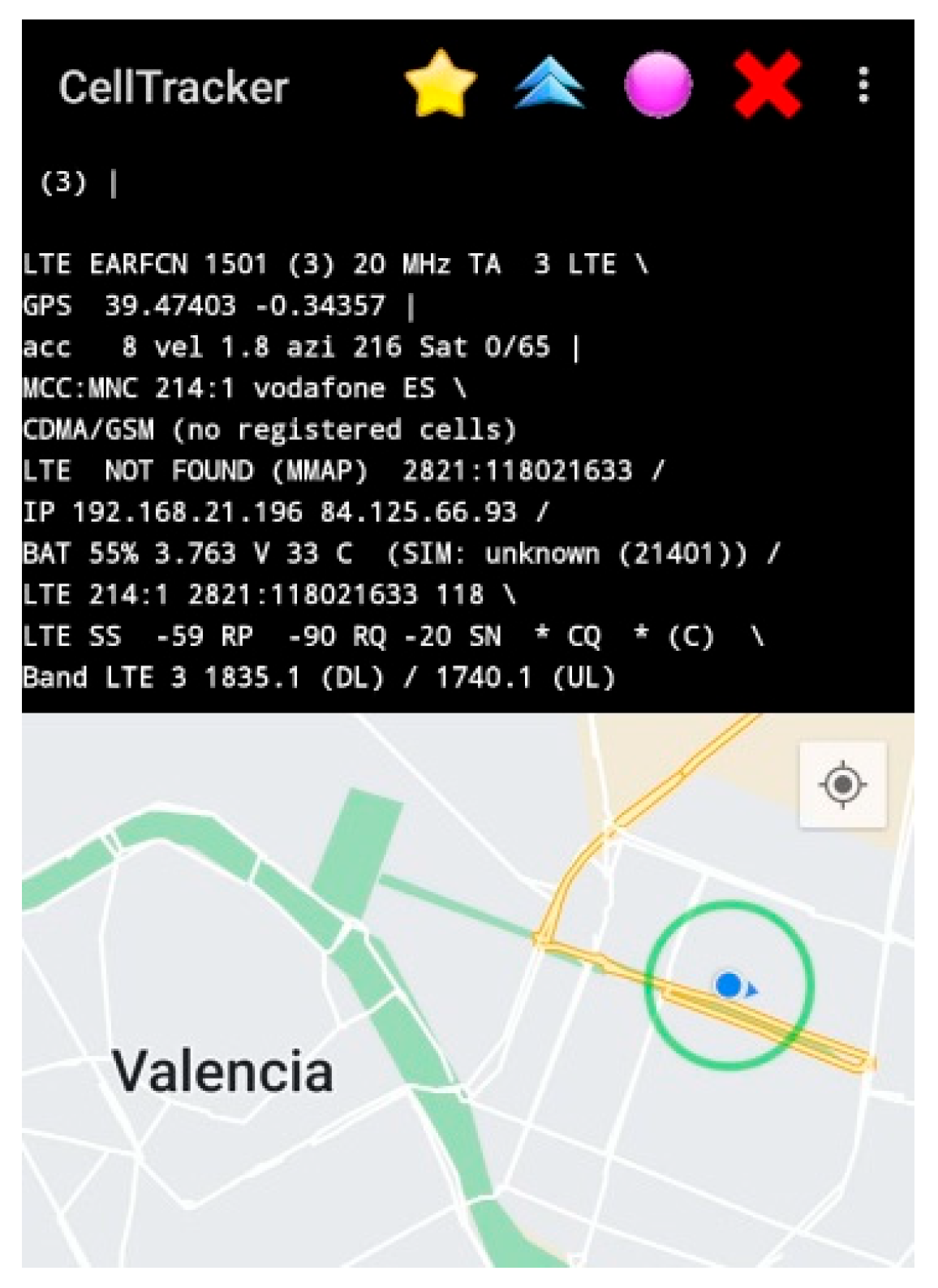
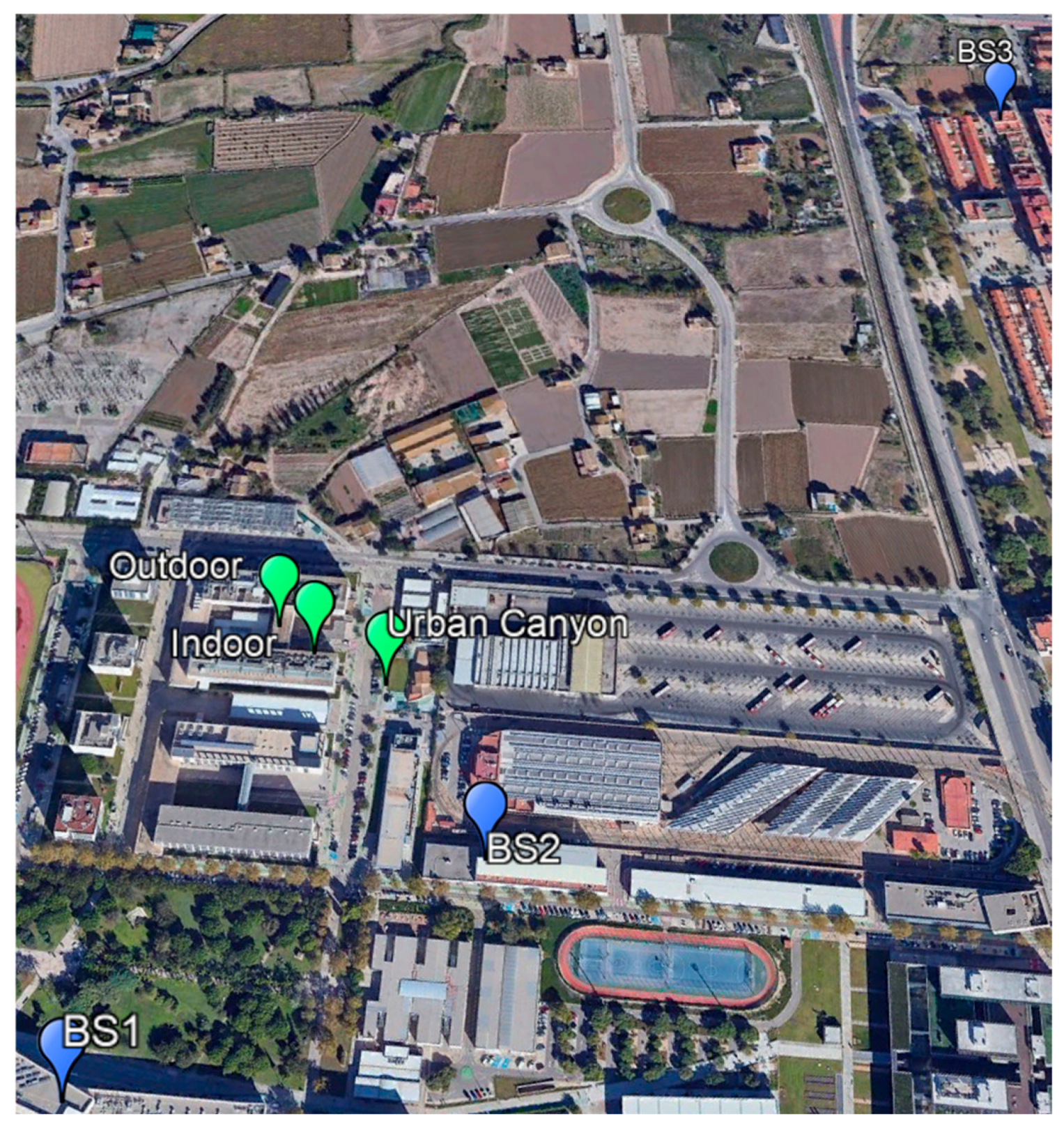
Figure 1.
Geographic positions of the BSs and UE locations for the outdoor, indoor, and urban canyon scenarios.
Figure 1.
Geographic positions of the BSs and UE locations for the outdoor, indoor, and urban canyon scenarios.
Figure 2.
UE—Xiaomi Mi 8 Pro smartphone—positioned on a rooftop in the outdoor scenario.
Figure 2.
UE—Xiaomi Mi 8 Pro smartphone—positioned on a rooftop in the outdoor scenario.
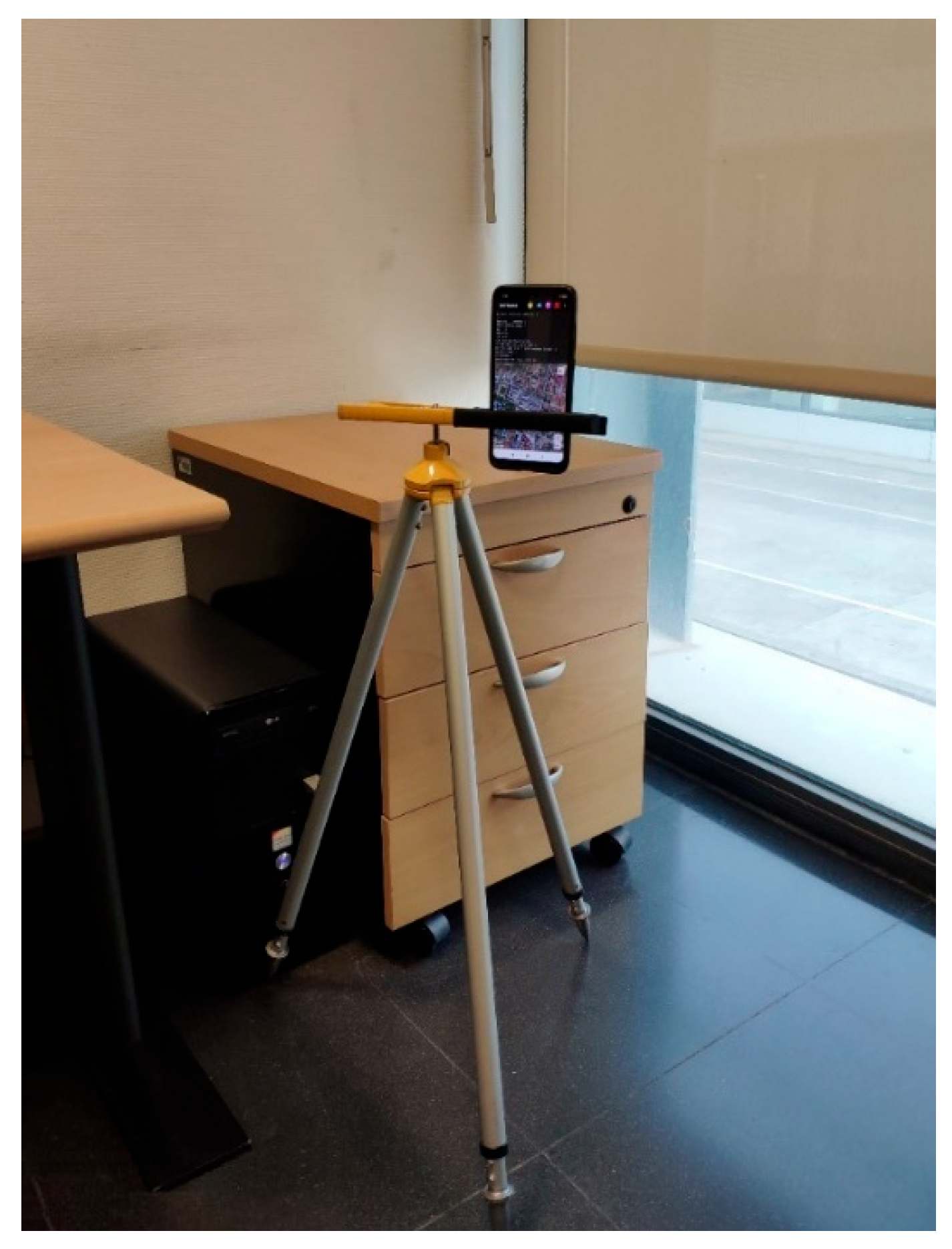
Figure 3.
UE—Xiaomi Mi 8 Pro smartphone —in the urban canyon scenario.
Figure 3.
UE—Xiaomi Mi 8 Pro smartphone —in the urban canyon scenario.
Figure 4.
UE—Xiaomi Mi 8 Pro smartphone—positioned near a window in the indoor scenario.
Figure 4.
UE—Xiaomi Mi 8 Pro smartphone—positioned near a window in the indoor scenario.
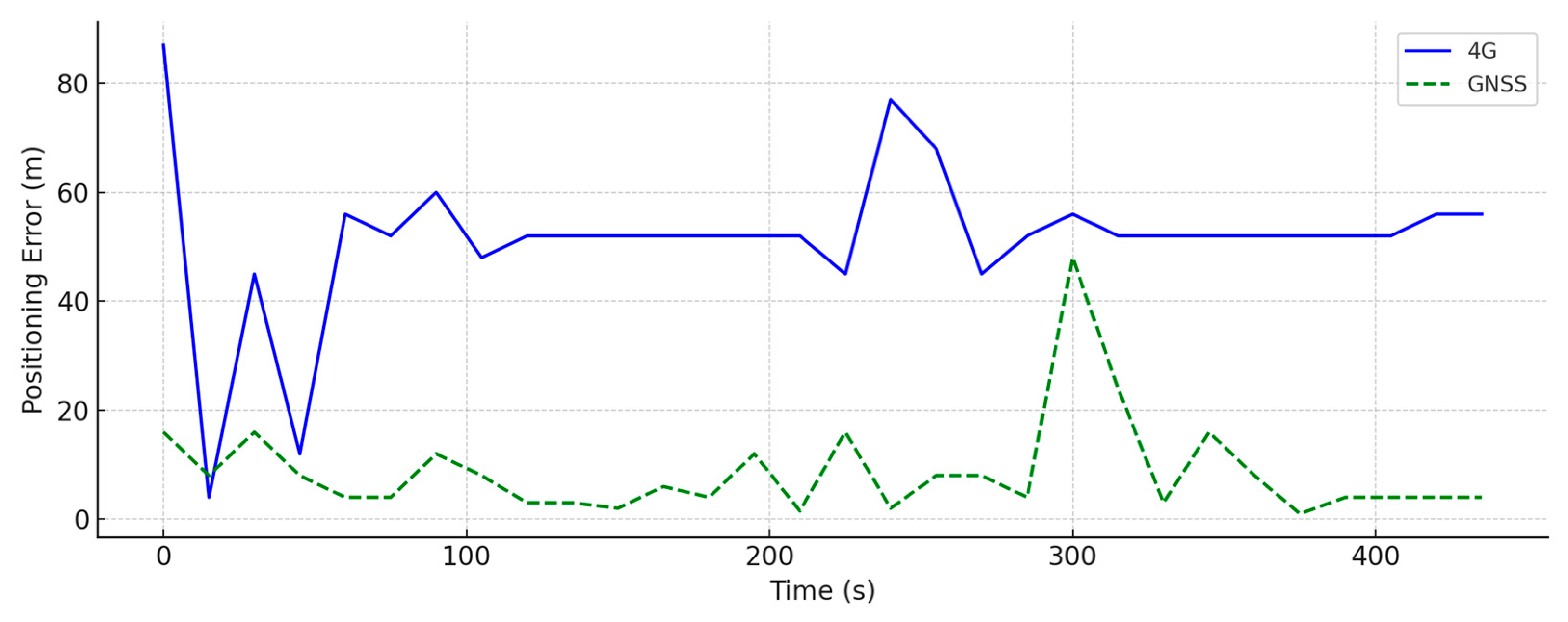
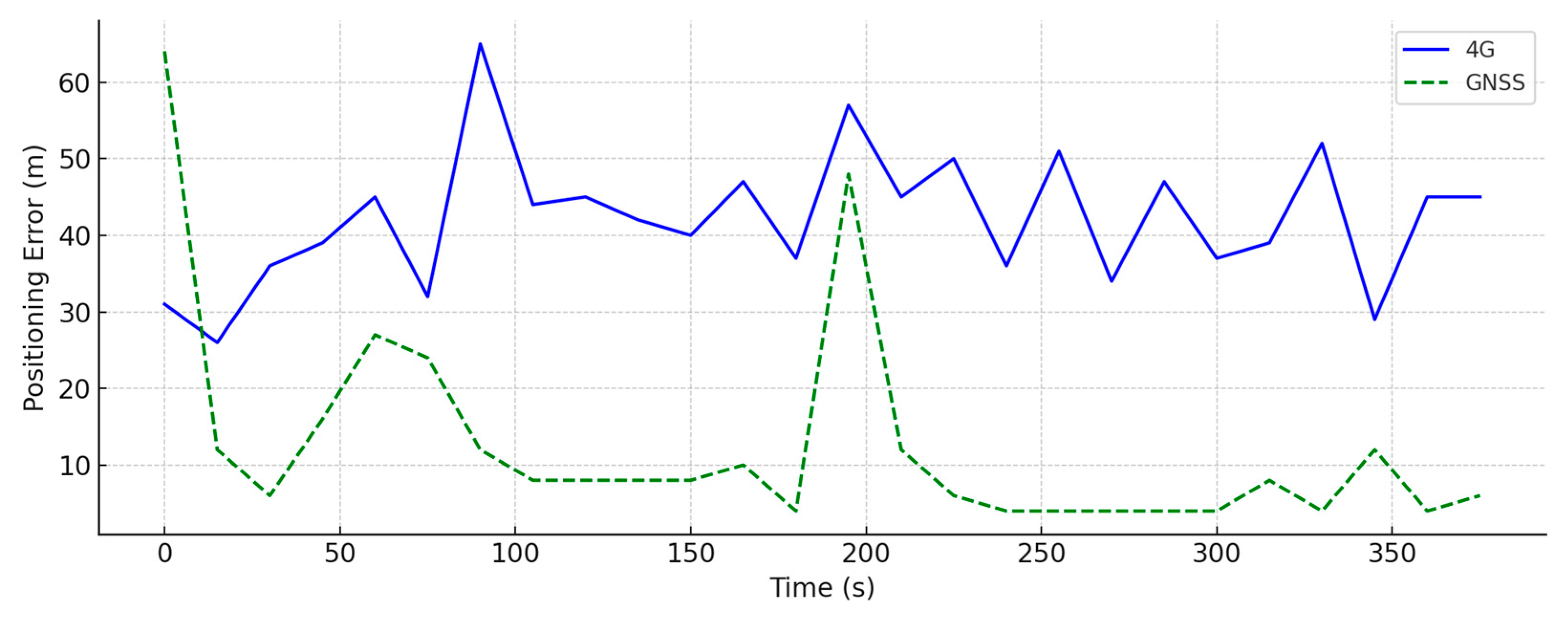
Figure 5.
Time series of a priori positioning errors in the outdoor scenario using GNSS and 4G data collected at 15 s intervals. GNSS demonstrated a stable and low-error performance under open-sky conditions, while 4G showed more variability and a less consistent accuracy.
Figure 5.
Time series of a priori positioning errors in the outdoor scenario using GNSS and 4G data collected at 15 s intervals. GNSS demonstrated a stable and low-error performance under open-sky conditions, while 4G showed more variability and a less consistent accuracy.
Figure 6.
Time series of a priori positioning errors in the urban canyon scenario using GNSS and 4G data. Sampling was performed every 15 s. GNSS showed moderate fluctuations, while 4G exhibited a pronounced instability due to multipath and partial obstruction in the environment.
Figure 6.
Time series of a priori positioning errors in the urban canyon scenario using GNSS and 4G data. Sampling was performed every 15 s. GNSS showed moderate fluctuations, while 4G exhibited a pronounced instability due to multipath and partial obstruction in the environment.
Figure 7.
Time series of a priori positioning errors in the indoor scenario using GNSS and 4G data. Data were collected at 15 s intervals. GNSS performance showed greater variability due to signal degradation in enclosed environments, while 4G offered a comparatively more stable accuracy.
Figure 7.
Time series of a priori positioning errors in the indoor scenario using GNSS and 4G data. Data were collected at 15 s intervals. GNSS performance showed greater variability due to signal degradation in enclosed environments, while 4G offered a comparatively more stable accuracy.
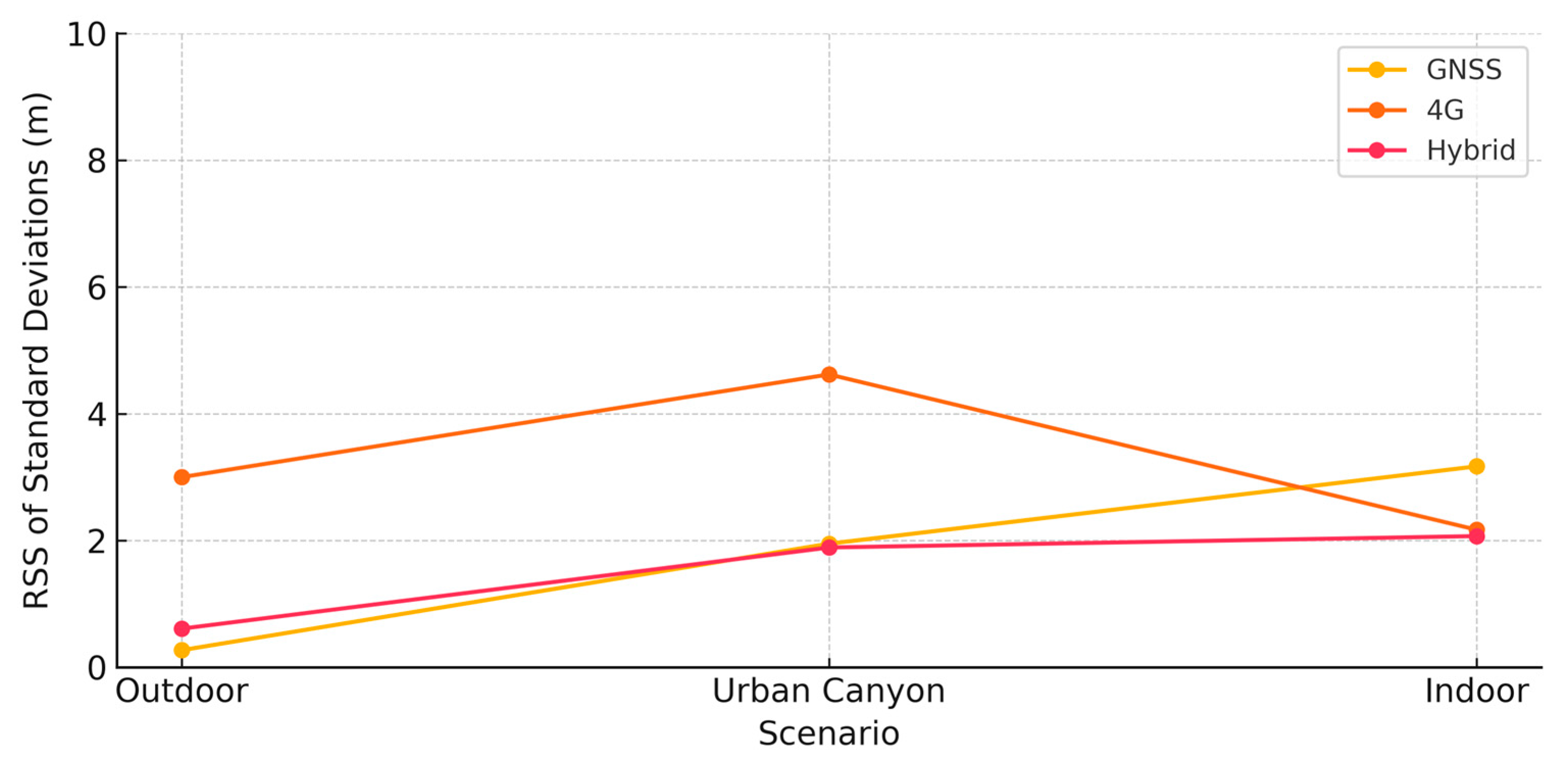
Figure 8.
Root sum square (RSS) of standard deviations for the position-level method across the outdoor, urban canyon, and indoor scenarios. This metric reflects the internal precision of the GNSS-only, 4G-only, and hybrid solutions.
Figure 8.
Root sum square (RSS) of standard deviations for the position-level method across the outdoor, urban canyon, and indoor scenarios. This metric reflects the internal precision of the GNSS-only, 4G-only, and hybrid solutions.
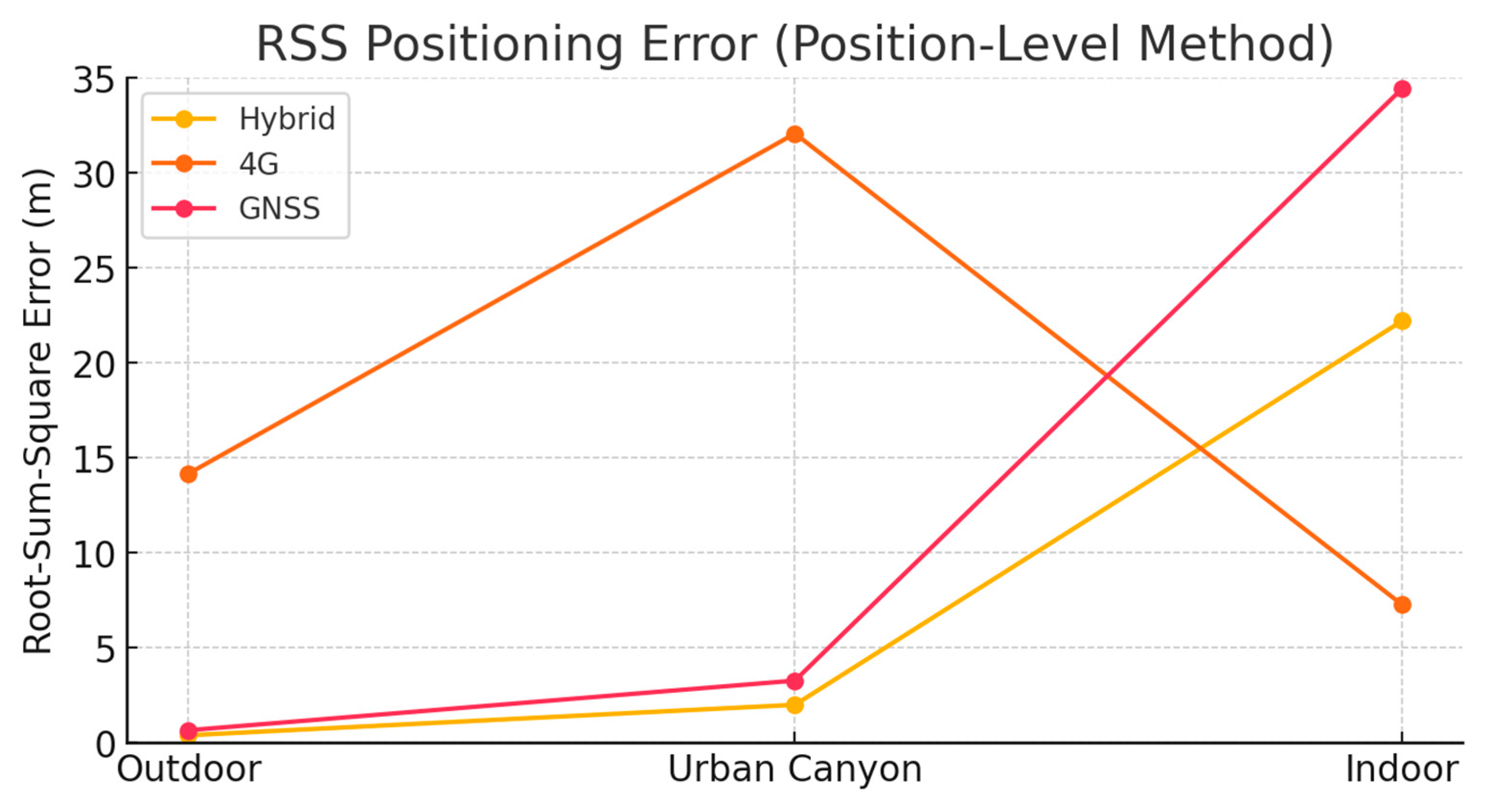
Figure 9.
Root sum square (RSS) of positioning errors for the position-level hybridization method across the outdoor, urban canyon, and indoor scenarios. This graph summarizes the overall accuracy achieved by each solution in the three test environments.
Figure 9.
Root sum square (RSS) of positioning errors for the position-level hybridization method across the outdoor, urban canyon, and indoor scenarios. This graph summarizes the overall accuracy achieved by each solution in the three test environments.
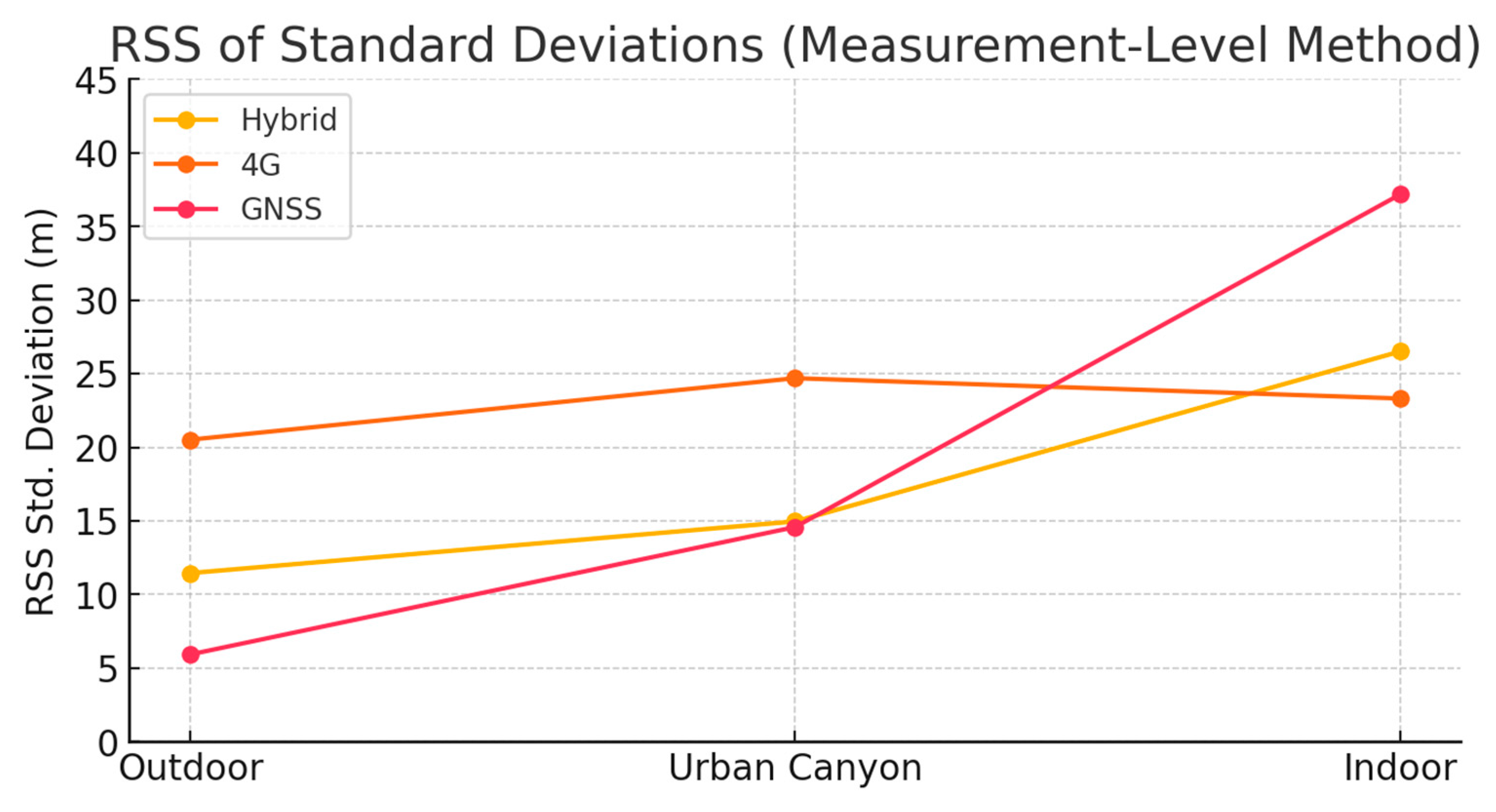
Figure 10.
Root sum square (RSS) of standard deviations for the measurement-level hybridization method across the outdoor, urban canyon, and indoor scenarios. This metric quantifies the internal precision of each method tested.
Figure 10.
Root sum square (RSS) of standard deviations for the measurement-level hybridization method across the outdoor, urban canyon, and indoor scenarios. This metric quantifies the internal precision of each method tested.
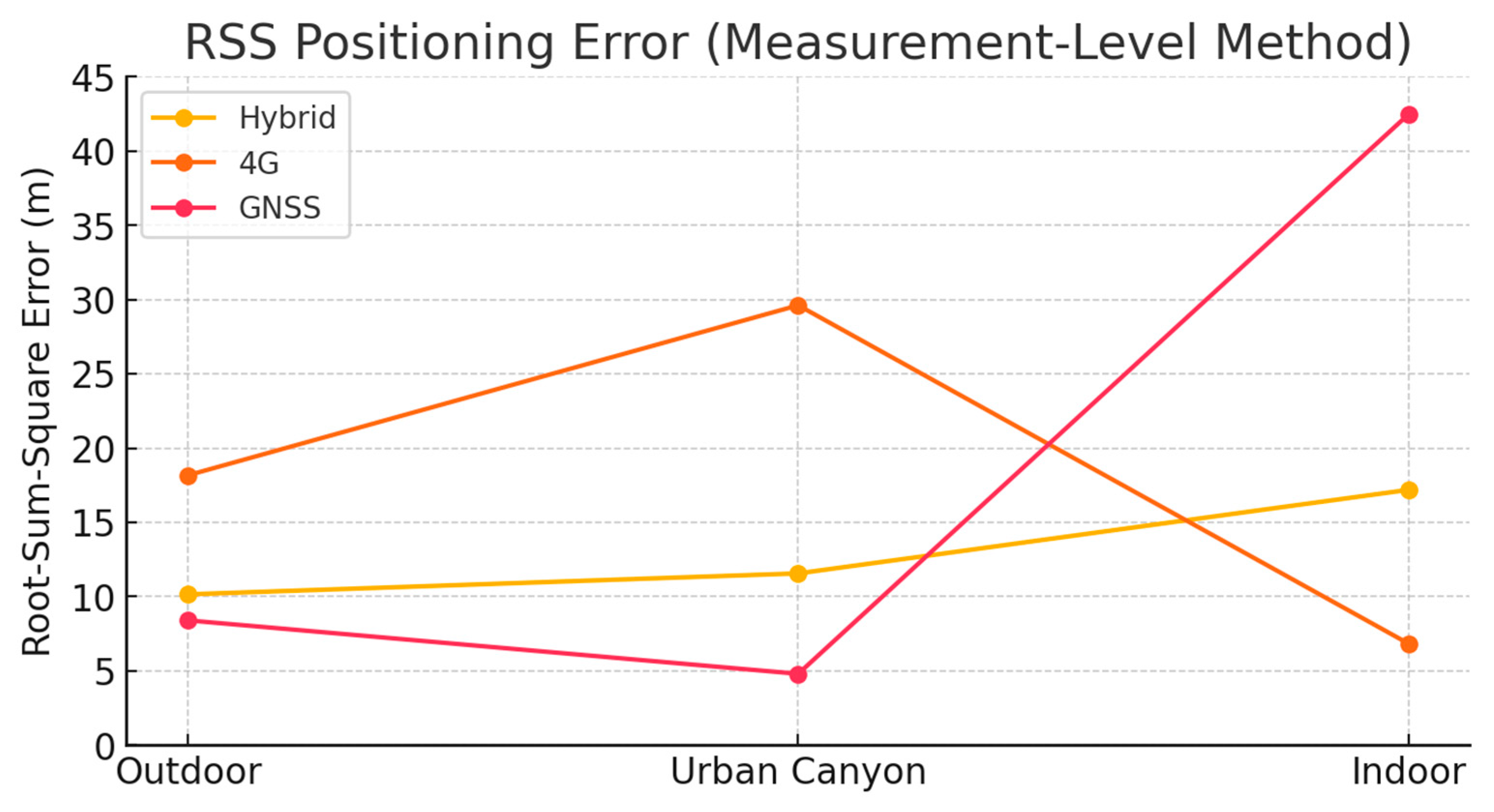
Figure 11.
Root sum square (RSS) of positioning errors with respect to the reference coordinates for the measurement-level hybridization method. This graph summarizes the total positioning accuracy for each solution in the three test environments.
Figure 11.
Root sum square (RSS) of positioning errors with respect to the reference coordinates for the measurement-level hybridization method. This graph summarizes the total positioning accuracy for each solution in the three test environments.
Table 1.
BS coordinates and associated standard deviations.
Table 1.
BS coordinates and associated standard deviations.
| BS | E (m) | N (m) | U (m) | (m) | (m) | (m) |
|---|
| BS1 | 728,856.17 | 4,373,346.20 | 93.22 | 0.03 | 0.02 | 0.04 |
| BS2 | 729,094.42 | 4,373,423.43 | 72.07 | 0.01 | 0.03 | 0.05 |
| BS3 | 729,592.05 | 4,373,891.14 | 82.22 | 0.02 | 0.02 | 0.05 |
Table 2.
Reference point coordinates and associated standard deviations.
Table 2.
Reference point coordinates and associated standard deviations.
| Scenarios | E (m) | N (m) | U (m) | (m) | (m) | (m) |
|---|
| Outdoor | 729,010.11 | 4,373,590.06 | 72.98 | 0.03 | 0.02 | 0.04 |
| Urban canyon | 729,063.61 | 4,373,540.17 | 55.07 | 0.01 | 0.03 | 0.05 |
| Indoor | 729,034.20 | 4,373,567.76 | 60.58 | 0.02 | 0.02 | 0.05 |
Table 3.
Root mean square (RMS) positioning errors computed from the raw field data corresponding to
Figure 5,
Figure 6 and
Figure 7. The values quantify the positioning performance of GNSS and 4G across the three experimental scenarios: indoor, urban canyon, and outdoor. These are a priori errors as directly reported by the UE, prior to applying any hybridization methods or outlier suppression techniques.
Table 3.
Root mean square (RMS) positioning errors computed from the raw field data corresponding to
Figure 5,
Figure 6 and
Figure 7. The values quantify the positioning performance of GNSS and 4G across the three experimental scenarios: indoor, urban canyon, and outdoor. These are a priori errors as directly reported by the UE, prior to applying any hybridization methods or outlier suppression techniques.
| Data Collected | GNSS RMS (m) | 4G RMS (m) |
|---|
| Indoor | 27.81 | 20.87 |
| Urban canyon | 18.80 | 43.03 |
| Outdoor | 12.62 | 53.56 |
Table 4.
Estimated coordinates and standard deviations for the outdoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column reports the root sum square of the standard deviations for the east, north, and up components, providing a compact measure of internal precision.
Table 4.
Estimated coordinates and standard deviations for the outdoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column reports the root sum square of the standard deviations for the east, north, and up components, providing a compact measure of internal precision.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,009.80 | 4,373,590.02 | 73.22 | 0.34 | 0.49 | 0.11 | 0.61 |
| 4G | 729,006.45 | 4,373,576.40 | 72.39 | 2.24 | 1.97 | 0.35 | 3.00 |
| GNSS | 729,009.63 | 4,373,590.20 | 72.54 | 0.04 | 0.17 | 0.21 | 0.27 |
Table 5.
Estimated coordinates and standard deviations for the urban canyon scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column indicates the combined 3D precision via the root sum square of standard deviations for the three spatial axes.
Table 5.
Estimated coordinates and standard deviations for the urban canyon scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column indicates the combined 3D precision via the root sum square of standard deviations for the three spatial axes.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,061.97 | 4,373,539.54 | 57.04 | 1.33 | 1.20 | 0.59 | 1.89 |
| 4G | 729,034.67 | 4,373,539.70 | 57.26 | 2.30 | 4.01 | 0.12 | 4.62 |
| GNSS | 729,065.84 | 4,373,538.44 | 57.70 | 0.58 | 0.90 | 1.63 | 1.95 |
Table 6.
Estimated coordinates and standard deviations for the indoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column reflects the total standard deviation across the east, north, and up components.
Table 6.
Estimated coordinates and standard deviations for the indoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column reflects the total standard deviation across the east, north, and up components.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,037.88 | 4,373,589.12 | 64.99 | 1.19 | 1.22 | 1.17 | 2.07 |
| 4G | 729,031.99 | 4,373,574.26 | 60.20 | 1.78 | 1.01 | 0.73 | 2.17 |
| GNSS | 729,042.29 | 4,373,598.98 | 72.29 | 1.22 | 1.98 | 2.16 | 3.17 |
Table 7.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the outdoor environment. The RSS column summarizes the total positioning error relative to the reference coordinates, computed as the root sum square of the east, north, and up errors.
Table 7.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the outdoor environment. The RSS column summarizes the total positioning error relative to the reference coordinates, computed as the root sum square of the east, north, and up errors.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 0.31 | 0.04 | −0.24 | 0.39 |
| 4G | 3.65 | 13.66 | 0.58 | 14.15 |
| GNSS | 0.48 | −0.13 | 0.43 | 0.66 |
Table 8.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the urban canyon environment. The RSS column provides the total 3D positioning error using the root sum square of the individual component errors.
Table 8.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the urban canyon environment. The RSS column provides the total 3D positioning error using the root sum square of the individual component errors.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 1.64 | 0.62 | −0.96 | 2.00 |
| 4G | 28.93 | −13.80 | −1.20 | 32.08 |
| GNSS | −2.25 | 1.73 | −1.63 | 3.27 |
Table 9.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the indoor environment. The RSS column indicates the combined positioning error in three dimensions based on the root sum square calculation.
Table 9.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the indoor environment. The RSS column indicates the combined positioning error in three dimensions based on the root sum square calculation.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | −3.68 | −21.36 | −4.84 | 22.21 |
| 4G | 2.65 | −6.75 | −0.51 | 7.27 |
| GNSS | −8.00 | −31.22 | −12.14 | 34.44 |
Table 10.
Estimated coordinates and standard deviations for the outdoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column summarizes the standard deviations for all three components using the root sum square metric.
Table 10.
Estimated coordinates and standard deviations for the outdoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column summarizes the standard deviations for all three components using the root sum square metric.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,010.46 | 4,373,589.69 | 62.84 | 1.80 | 2.01 | 11.13 | 11.45 |
| 4G | 729,008.60 | 4,373,588.03 | 54.99 | 2.43 | 0.83 | 20.35 | 20.51 |
| GNSS | 729,011.23 | 4,373,591.45 | 64.77 | 1.27 | 3.70 | 4.44 | 5.92 |
Table 11.
Estimated coordinates and standard deviations for the urban canyon scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column expresses the overall precision via the root sum square of the component-wise standard deviations.
Table 11.
Estimated coordinates and standard deviations for the urban canyon scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column expresses the overall precision via the root sum square of the component-wise standard deviations.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,055.51 | 4,373,547.93 | 57.88 | 5.05 | 4.78 | 13.25 | 14.96 |
| 4G | 729,037.96 | 4,373,554.22 | 59.73 | 4.26 | 0.29 | 24.32 | 24.69 |
| GNSS | 729,064.29 | 4,373,544.79 | 53.96 | 5.95 | 4.62 | 12.48 | 14.58 |
Table 12.
Estimated coordinates and standard deviations for the indoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column shows the total internal dispersion calculated from the standard deviations for E, N, and U.
Table 12.
Estimated coordinates and standard deviations for the indoor scenario using the hybrid, GNSS-only, and 4G-only solutions. The RSS column shows the total internal dispersion calculated from the standard deviations for E, N, and U.
| Obs | E (m) | N (m) | U (m) | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 729,041.09 | 4,373,576.05 | 73.96 | 5.06 | 12.06 | 23.06 | 26.51 |
| 4G | 729,038.71 | 4,373,562.78 | 59.38 | 4.81 | 0.51 | 22.80 | 23.31 |
| GNSS | 729,046.50 | 4,373,599.33 | 86.22 | 17.75 | 21.35 | 24.73 | 37.18 |
Table 13.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the outdoor environment. The RSS column presents the total positioning error using the root sum square of the E, N, and U errors.
Table 13.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the outdoor environment. The RSS column presents the total positioning error using the root sum square of the E, N, and U errors.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | −0.35 | 0.37 | 10.14 | 10.15 |
| 4G | 1.51 | 2.03 | 17.98 | 18.16 |
| GNSS | −1.12 | −1.39 | 8.21 | 8.40 |
Table 14.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the urban canyon environment. The RSS column quantifies the overall 3D positioning error using the root sum square method.
Table 14.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the urban canyon environment. The RSS column quantifies the overall 3D positioning error using the root sum square method.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | 8.10 | −7.76 | −2.81 | 11.56 |
| 4G | 25.65 | −14.05 | −4.66 | 29.61 |
| GNSS | −0.68 | −4.62 | 1.11 | 4.80 |
Table 15.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the indoor environment. The RSS column contains the root sum square of the positional error components, offering a single accuracy metric.
Table 15.
Accuracy comparison of the hybrid, GNSS-only, and 4G-only solutions in the indoor environment. The RSS column contains the root sum square of the positional error components, offering a single accuracy metric.
| Obs | (m) | (m) | (m) | RSS |
|---|
| Hybrid | −6.89 | −8.29 | −13.39 | 17.19 |
| 4G | −4.51 | 4.98 | 1.20 | 6.82 |
| GNSS | −12.30 | −31.57 | −25.64 | 42.49 |
Table 16.
Overall performance of hybrid, GNSS, and 4G positioning methods in outdoor, urban canyon, and indoor scenarios.
Table 16.
Overall performance of hybrid, GNSS, and 4G positioning methods in outdoor, urban canyon, and indoor scenarios.
| | Method | (m) | (m) | (m) |
|---|
| Outdoor | Measurement level | 1.27 (GNSS) | 3.70 (GNSS) | 4.44 (GNSS) |
| Position level | 0.04 (GNSS) | 0.17 (GNSS) | 0.11(Hybrid) |
| Indoor | Measurement level | 4.81 (4G) | 0.51 (4G) | 22.80 (4G) |
| Position level | 1.19 (Hybrid) | 1.22 (Hybrid) | 0.73 (4G) |
| Urban canyon | Measurement level | 5.95 (GNSS) | 4.62 (GNSS) | 12.48 (GNSS) |
| Position level | 0.58 (GNSS) | 0.90 (GNSS) | 0.12 (4G) |


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}