
Open-Circuit Fault Diagnosis for T-Type Three-Level Inverter via Improved Adaptive Threshold Sliding Mode Observer


Abstract
1. Introduction
2. Modeling
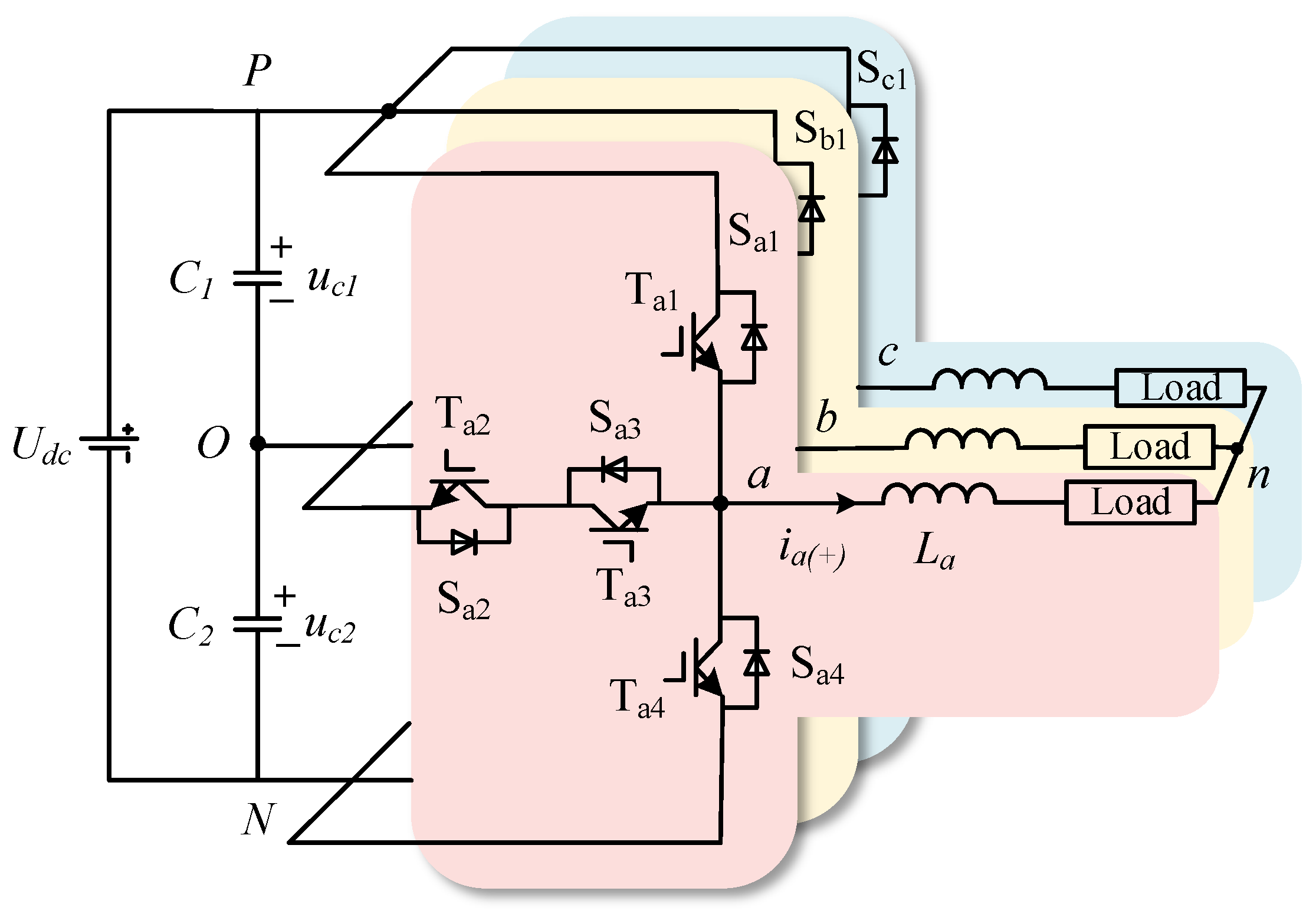
2.1. Hybrid Logic Dynamic Model of the T23L Inverter
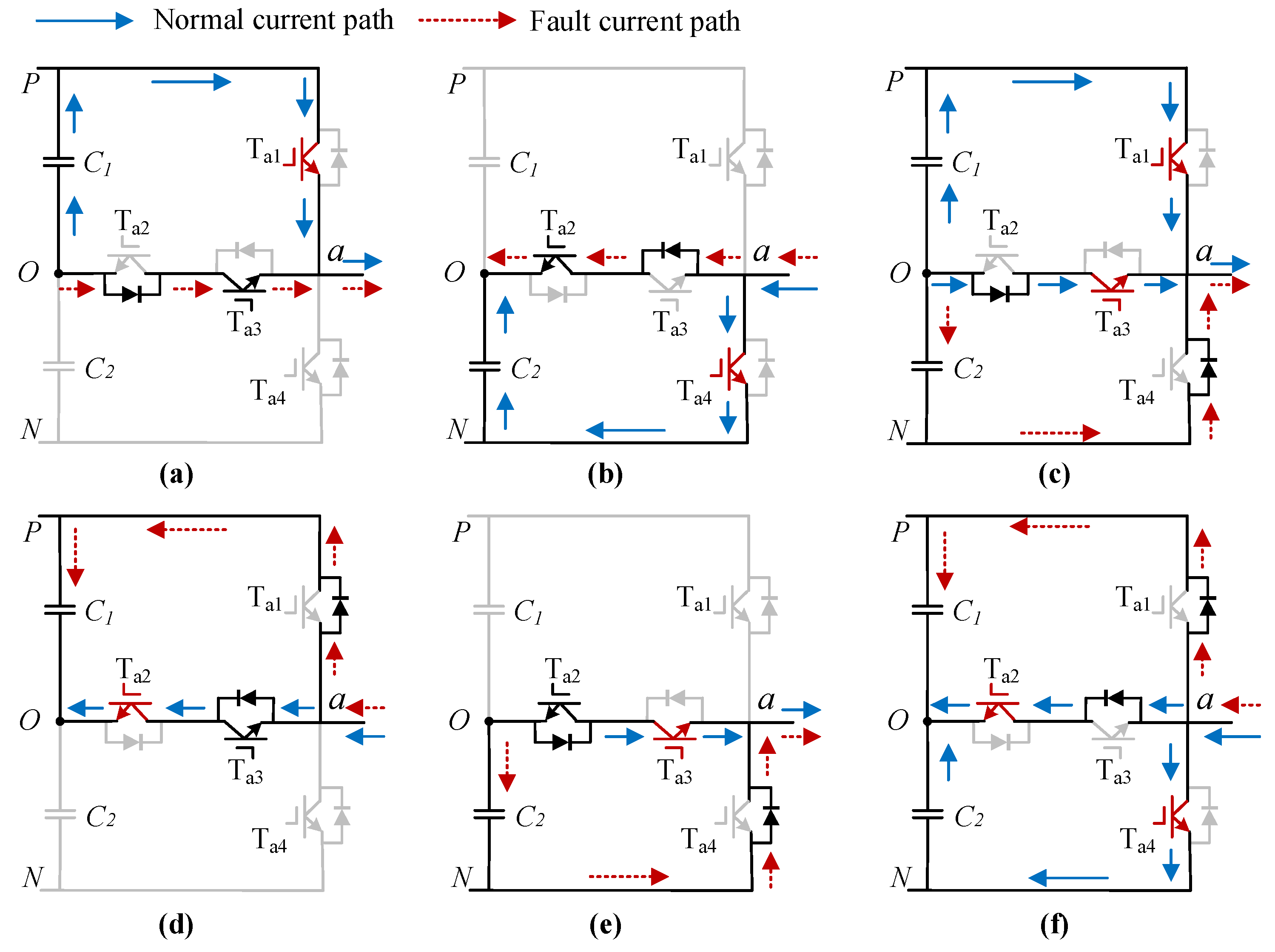
2.2. Analysis of Power Switch Fault
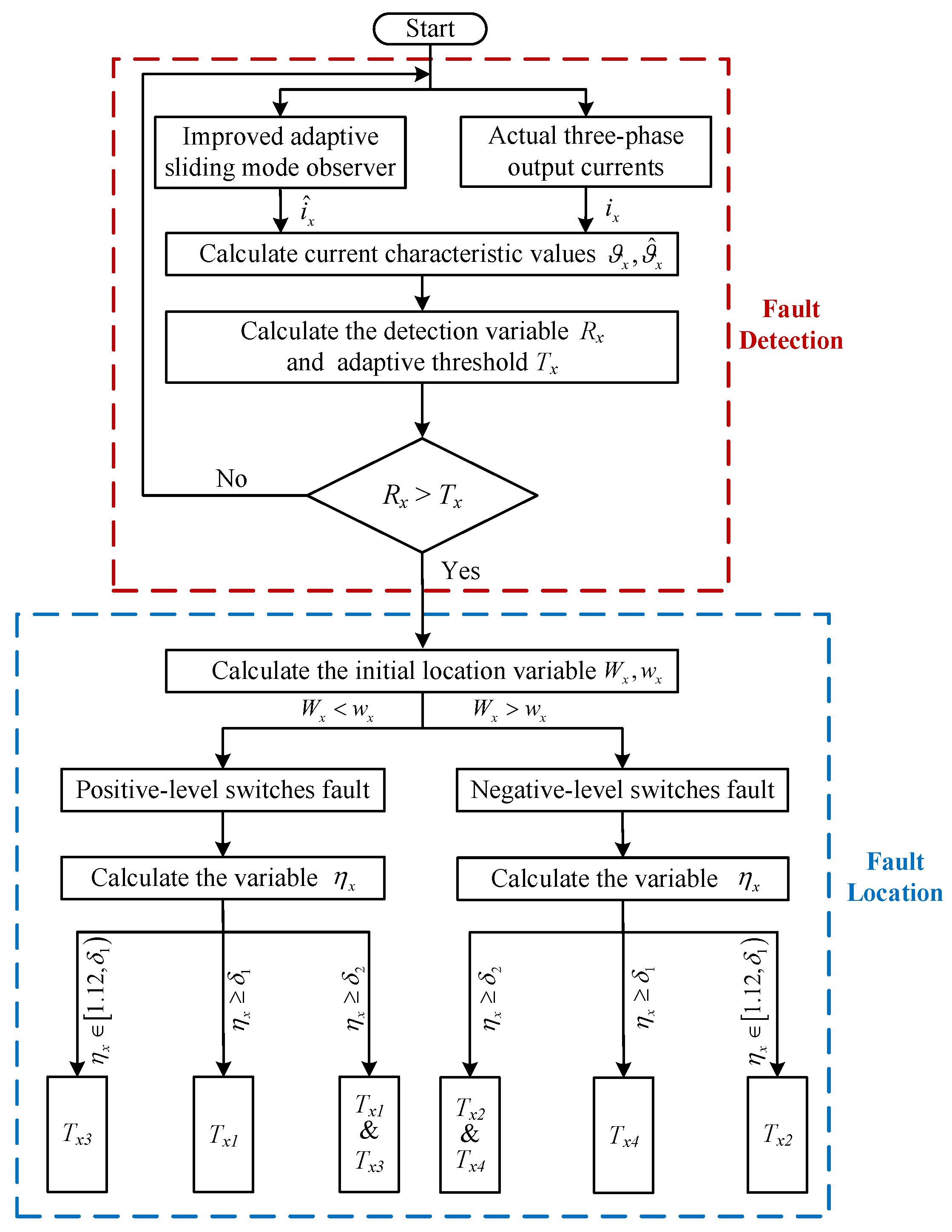
3. Open-Circuit Fault Diagnosis Strategy
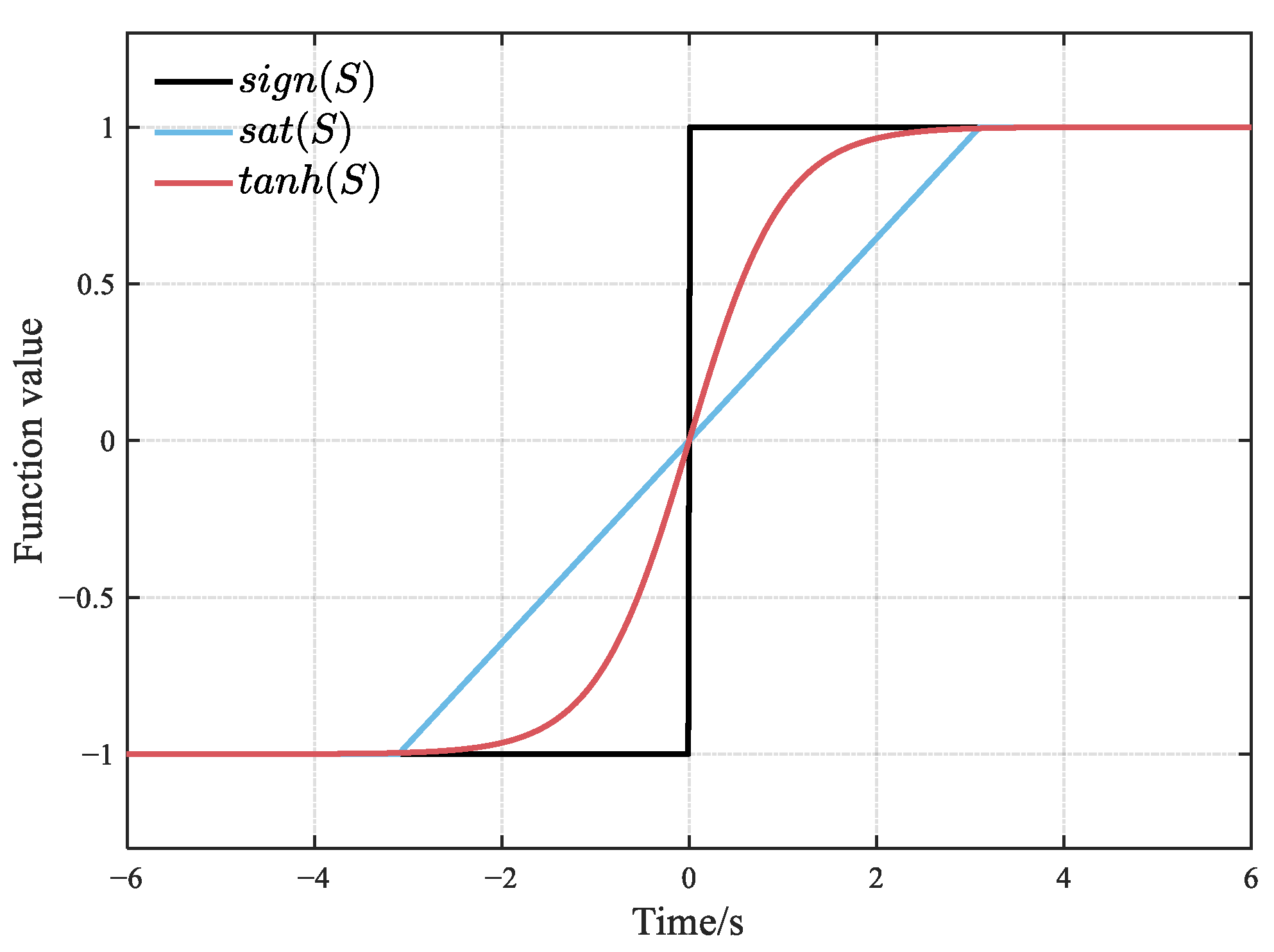
3.1. Design of IASMO
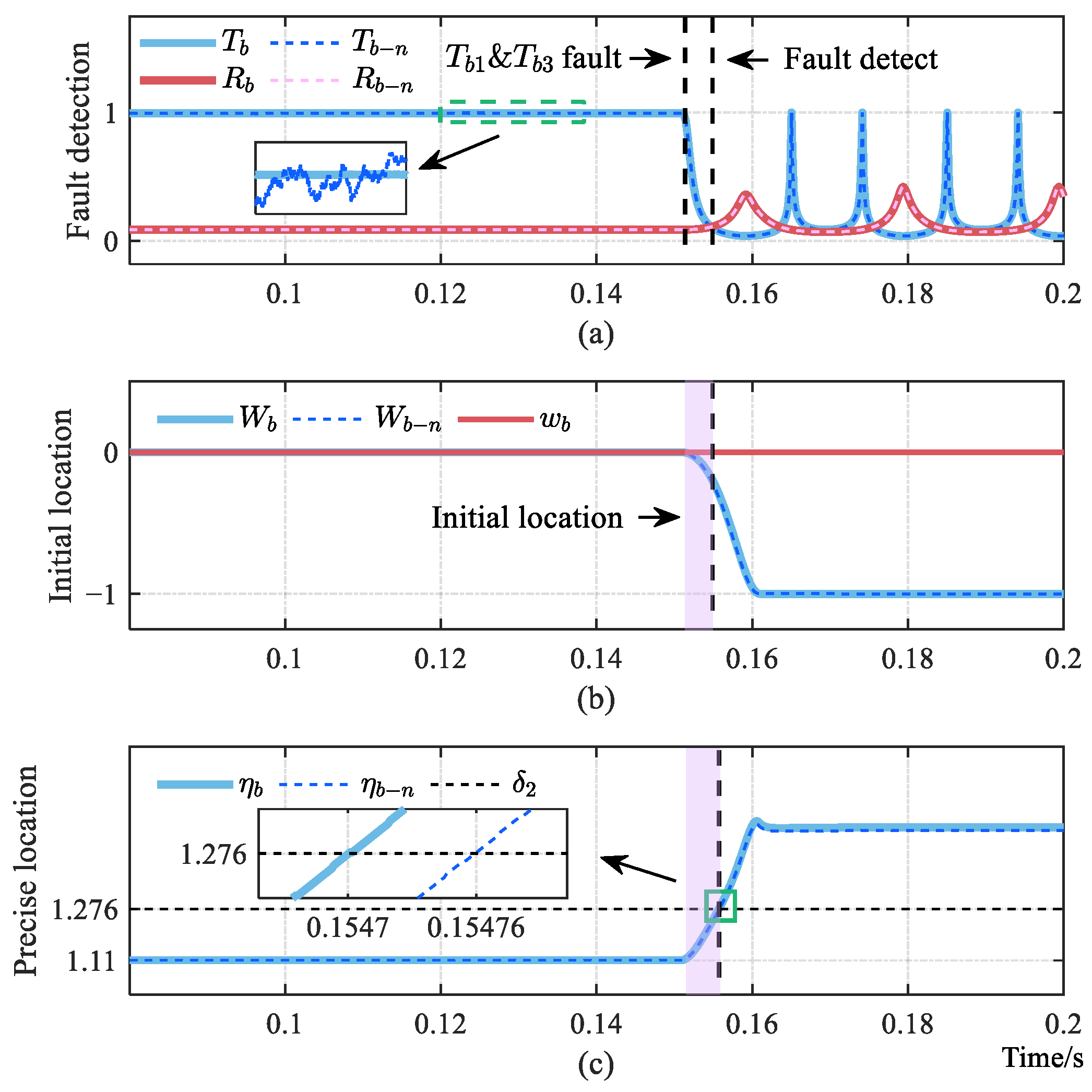
3.2. Fault Detection
3.3. Fault Location
4. Simulation Verification and Physical Experiment
4.1. Observer Stability Verification
4.2. Method Validity Verification
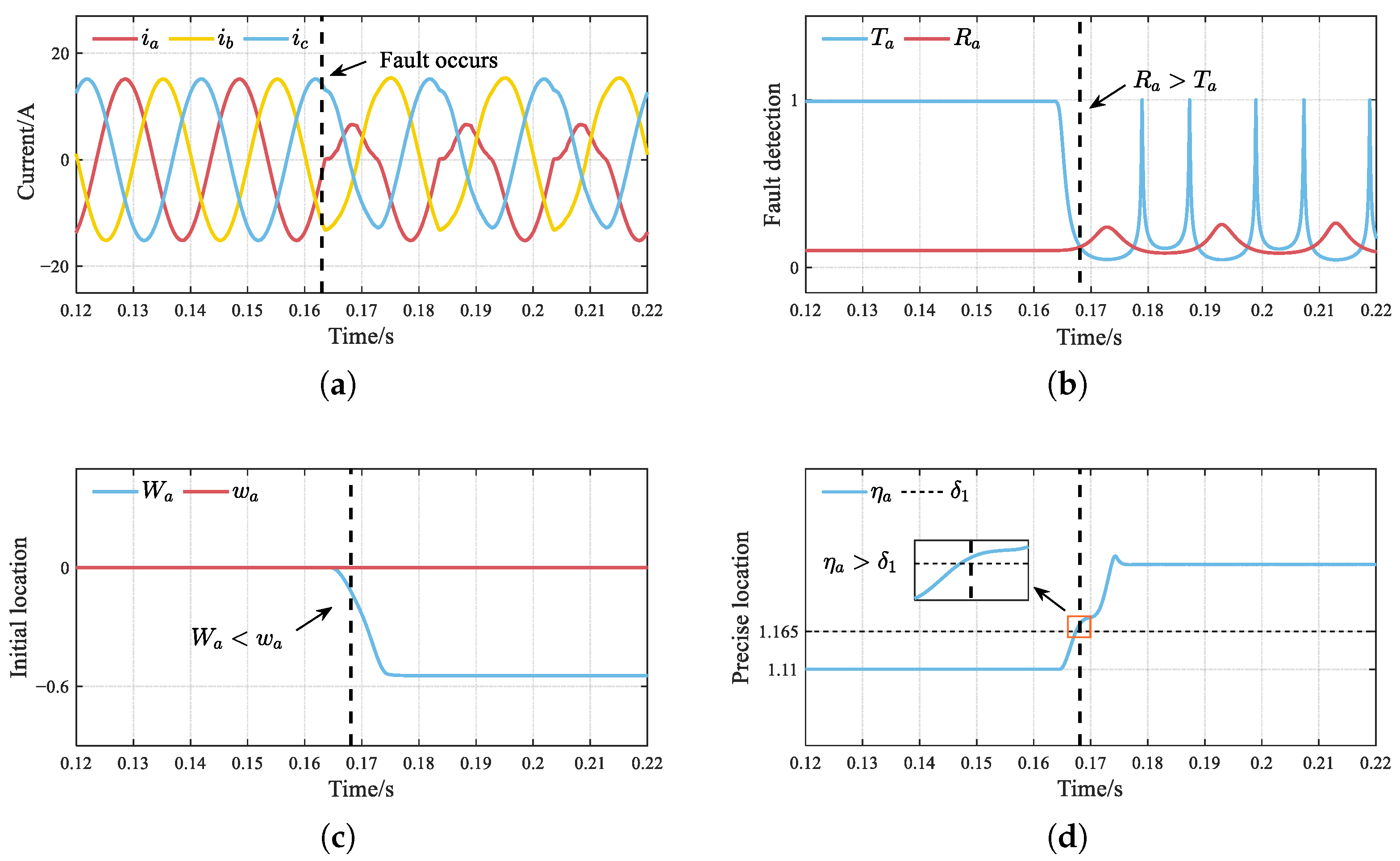
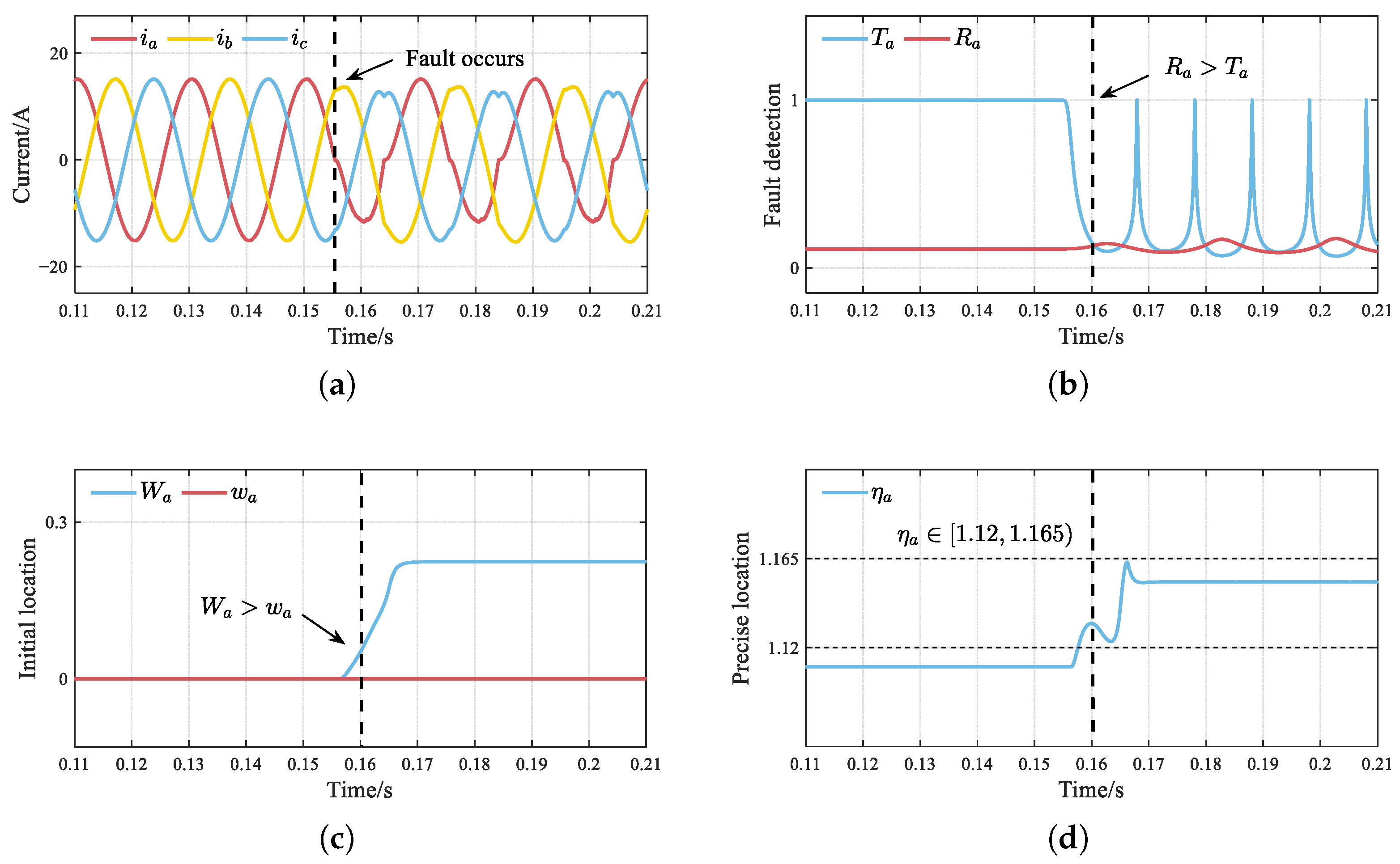
4.2.1. Experimental Results of Single-Switch Fault
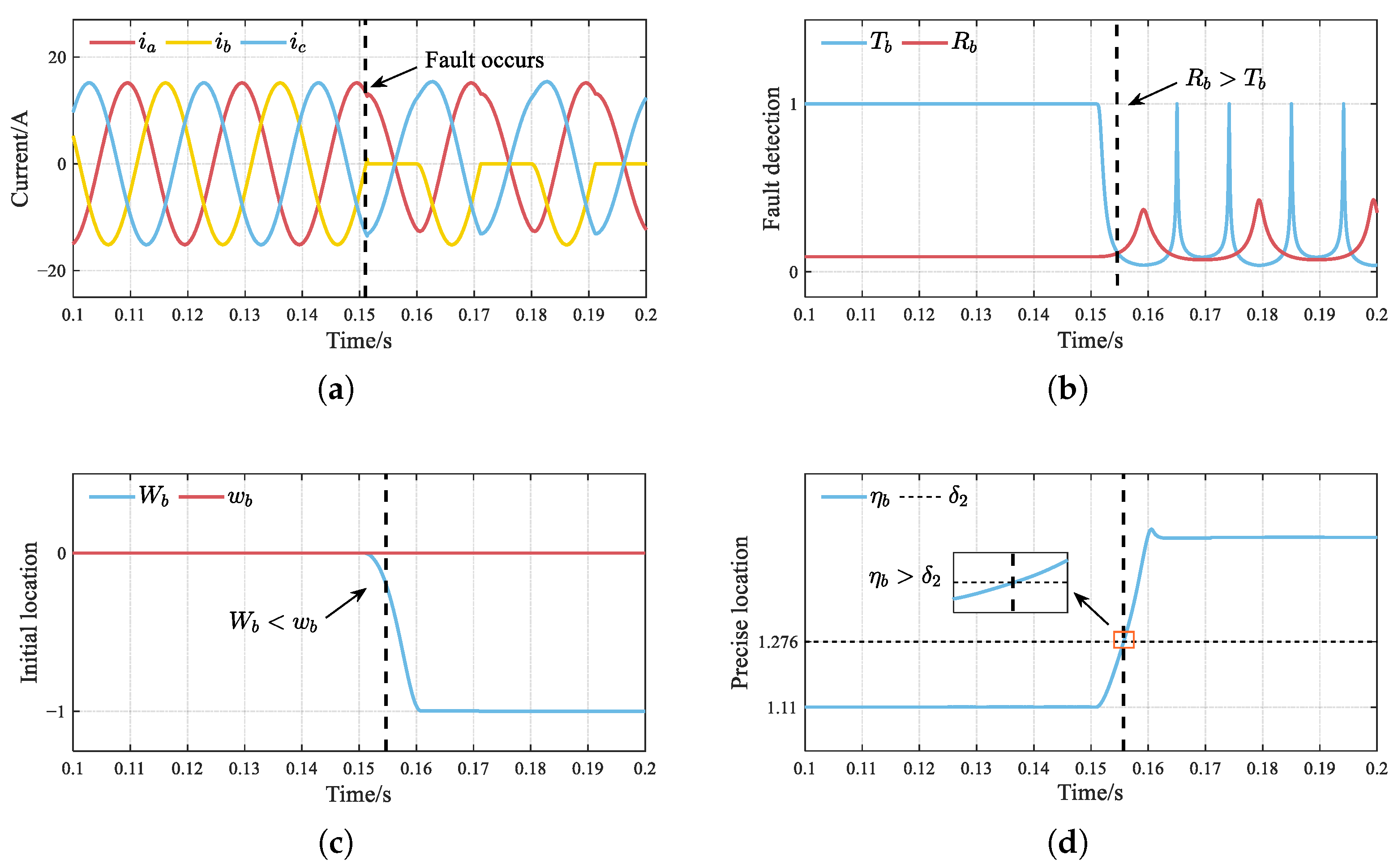
4.2.2. Experimental Results of Same-Phase Double-Switch Fault
4.3. Method Robustness Verification
4.3.1. Double-Switch Fault Under Voltage Fluctuation
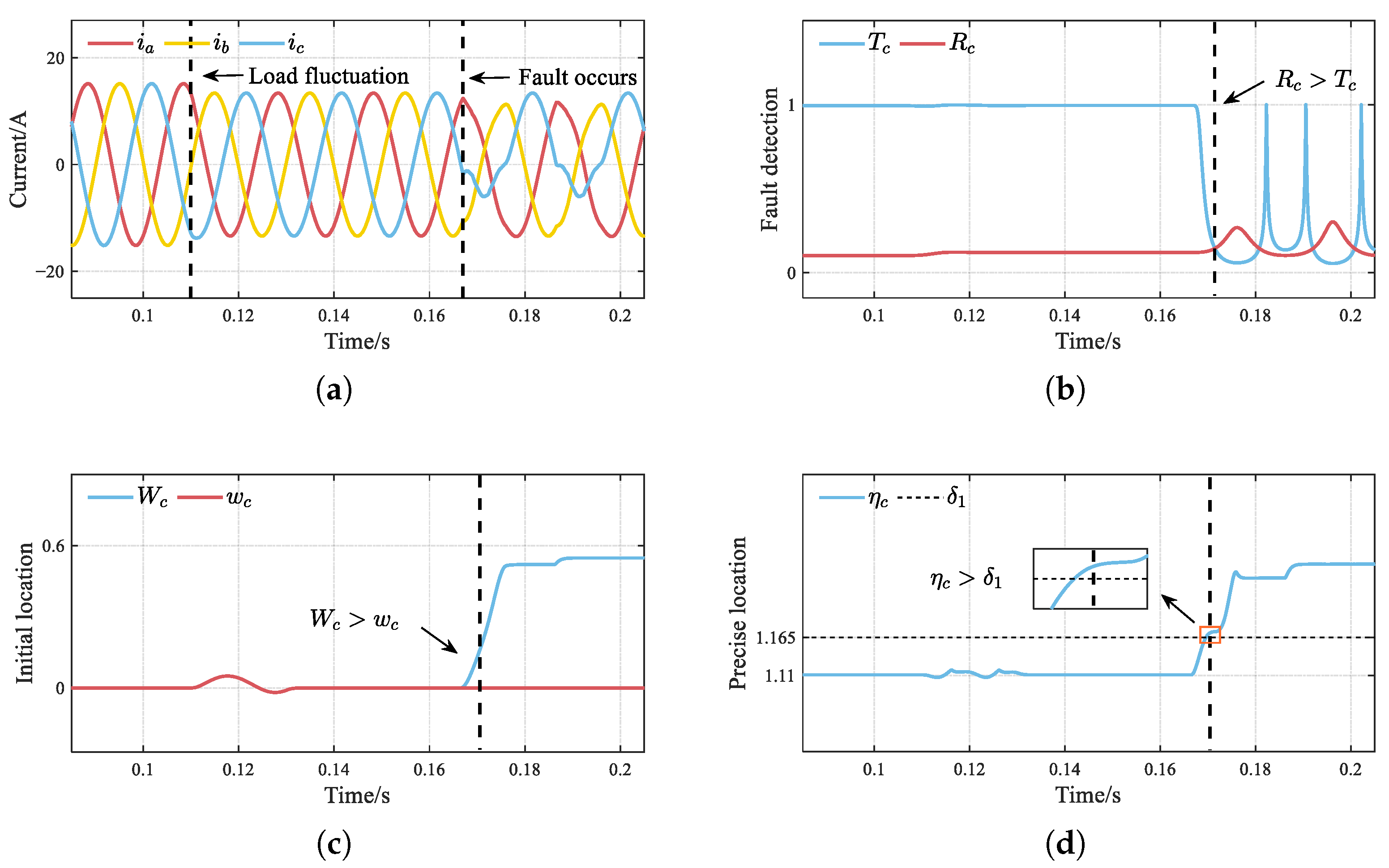
4.3.2. Single-Switch Fault Under Load Fluctuation
4.4. Simulation Analysis of Inverter Fault Diagnosis Under Noise Interference
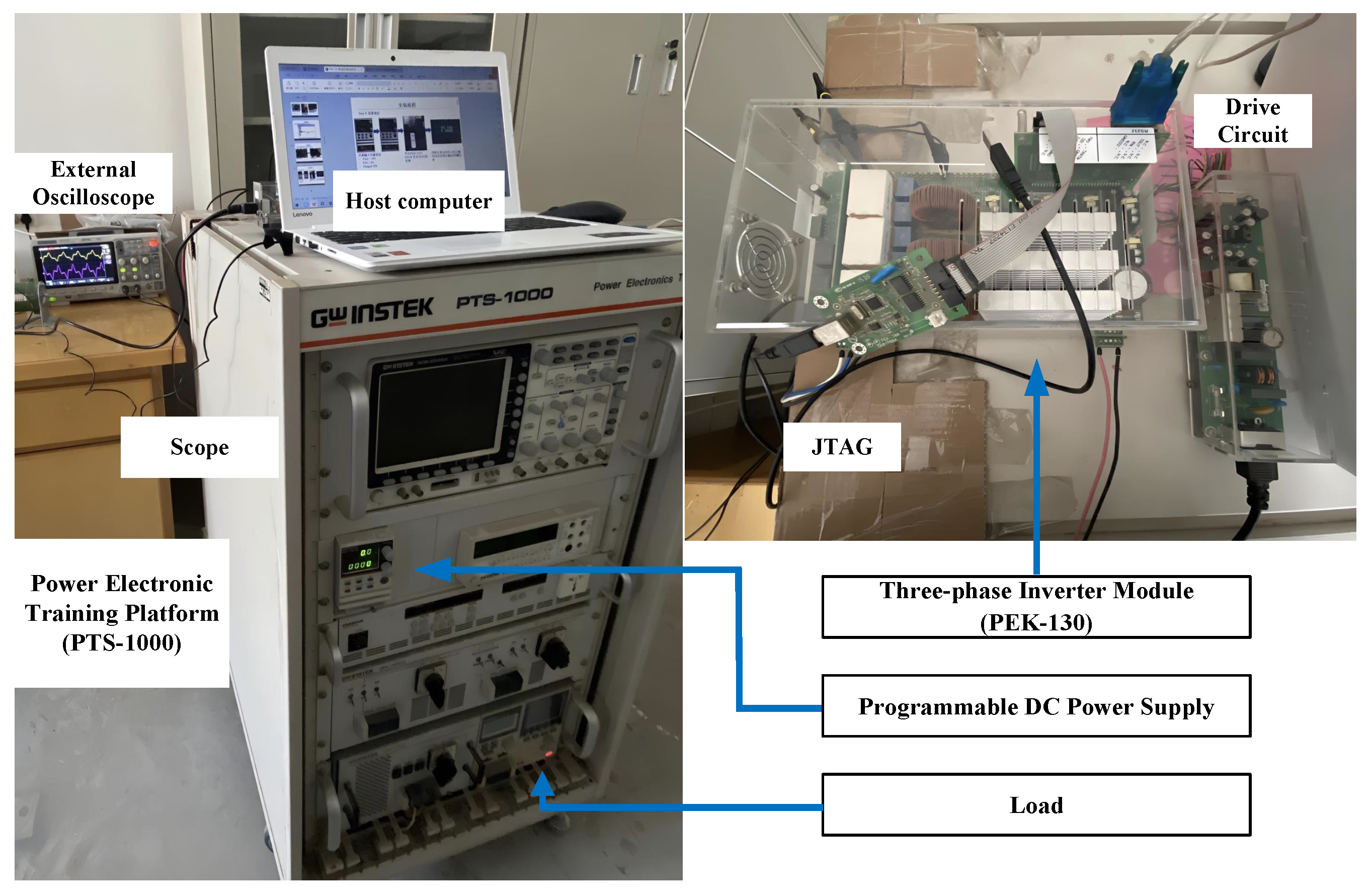
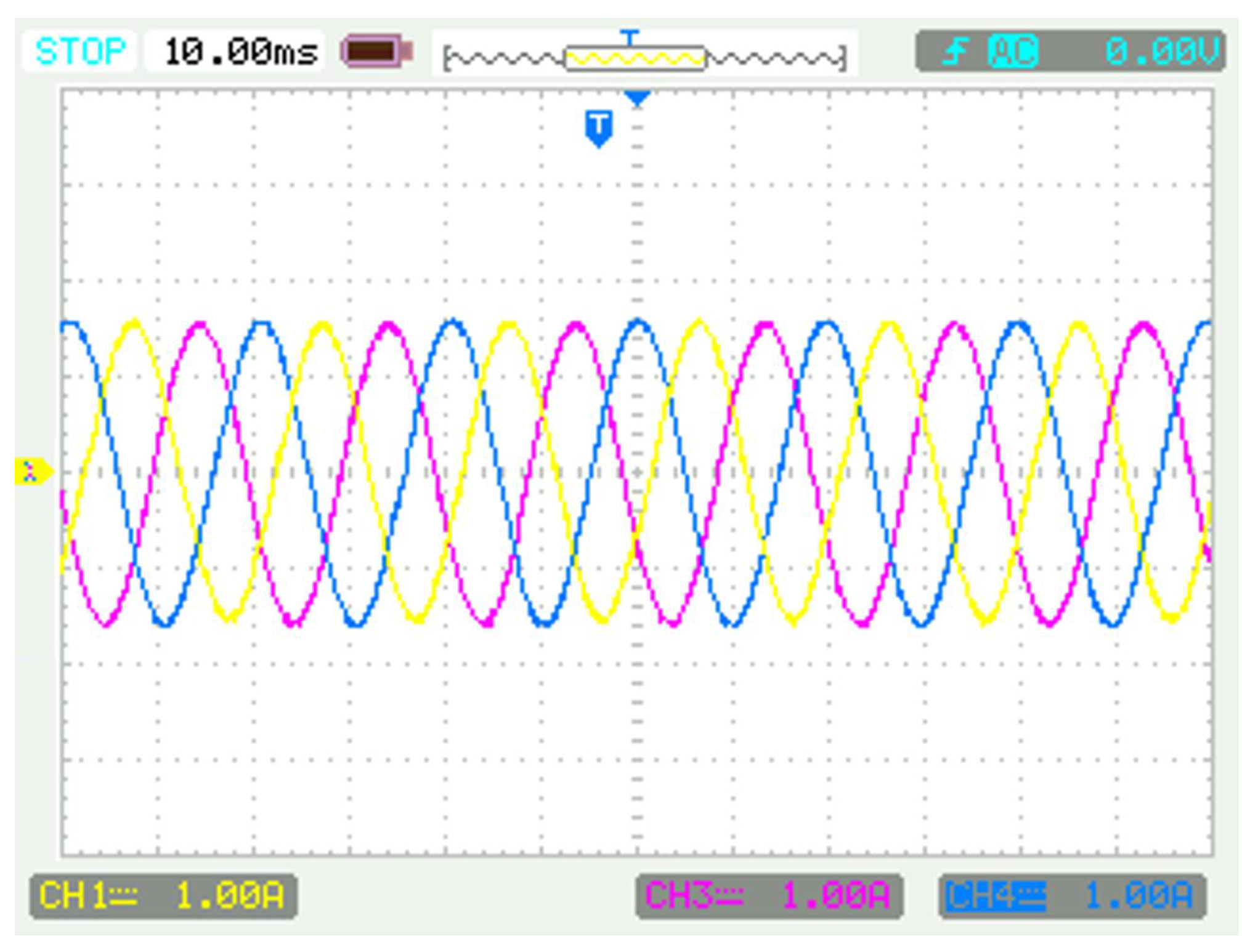
4.5. Experimental Results and Analysis
5. Diagnosis Performance Analysis and Comparative Performance Evaluation
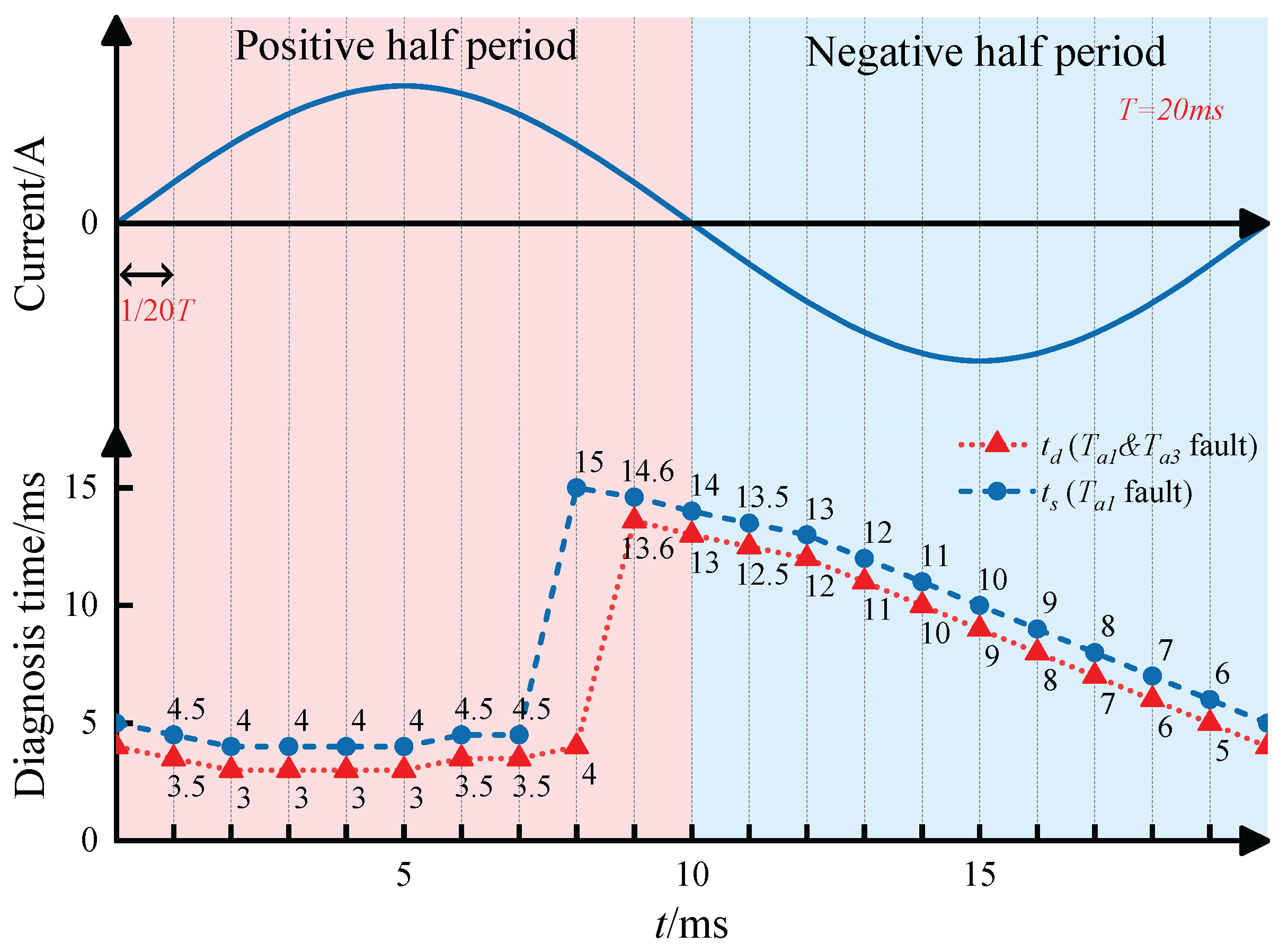
5.1. Diagnosis Time Characteristics Under Different Fault Occurrence Times
5.2. Performance Comparisons of Other Methods
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, J.; Demerdash, N.A.; Weise, N.; Katebi, R. A fast on-line diagnostic method for open-circuit switch faults in SiC-MOSFET-based T-type multilevel inverters. IEEE Trans. Ind. Appl. 2017, 53, 2948–2958. [Google Scholar] [CrossRef]
- Mahto, K.K.; Mahato, B.; Chandan, B.; Das, D.; Das, P.; Kumari, S.; Vita, V.; Pavlatos, C.; Fotis, G. A Modified Criss-Cross-Based T-Type MLI with Reduced Power Components. Technologies 2024, 12, 90. [Google Scholar] [CrossRef]
- Mahto, K.K.; Mahato, B.; Chandan, B.; Das, D.; Das, P.; Fotis, G.; Vita, V.; Mann, M. A new symmetrical source-based DC/AC converter with experimental verification. Electronics 2024, 13, 1975. [Google Scholar] [CrossRef]
- Chao, K.H.; Chang, L.Y.; Xu, F.Q. Smart fault-tolerant control system based on chaos theory and extension theory for locating faults in a three-level T-type inverter. Appl. Sci. 2019, 9, 3071. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Yang, Z.; Cheng, X. An Intelligent Control Strategy for a Highly Reliable Microgrid in Island Mode. Appl. Sci. 2022, 12, 801. [Google Scholar] [CrossRef]
- He, J.; You, C.C.; Zhang, X.; Li, Z.; Liu, Z. An adaptive dual-loop Lyapunov-based control scheme for a single-phase UPS inverter. IEEE Trans. Power Electron. 2020, 35, 8886–8891. [Google Scholar] [CrossRef]
- Mahto, K.K.; Pal, P.K.; Das, P.; Mittal, S.; Mahato, B. A new design of multilevel inverter based on T-type symmetrical and asymmetrical DC sources. Trans. Electr. Eng. 2023, 47, 639–657. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Zhang, X. Impedance-sum stability criterion for power electronic systems with two converters/sources. IEEE Access. 2019, 7, 21254–21265. [Google Scholar] [CrossRef]
- Gou, B.; Ge, X.; Wang, S.; Feng, X.; Kuo, J.B.; Habetler, T.G. An open-switch fault diagnosis method for single-phase PWM rectifier using a model-based approach in high-speed railway electrical traction drive system. IEEE Trans. Power Electron. 2015, 31, 3816–3826. [Google Scholar] [CrossRef]
- Zhang, W.; He, Y. A hypothesis method for T-type three-level inverters open-circuit fault diagnosis based on output phase voltage model. IEEE Trans. Power Electron. 2022, 37, 9718–9732. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, J.; Song, Y.; Sun, J.; Fu, H.; Chu, M. A seasonal-trend-decomposition-based voltage-source-inverter open-circuit fault diagnosis method. IEEE Trans. Power Electron. 2022, 37, 15517–15527. [Google Scholar] [CrossRef]
- Chen, M.; He, Y. Multiple open-circuit fault diagnosis method in NPC rectifiers using fault injection strategy. IEEE Trans. Power Electron. 2022, 37, 8554–8571. [Google Scholar] [CrossRef]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A data-driven fault diagnosis methodology in three-phase inverters for PMSM drive systems. IEEE Trans. Power Electron. 2016, 32, 5590–5600. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, Y. A transferrable data-driven method for IGBT open-circuit fault diagnosis in three-phase inverters. IEEE Trans. Power Electron. 2021, 36, 13478–13488. [Google Scholar] [CrossRef]
- Xing, Z.; He, Y.; Zhang, W. An online multiple open-switch fault diagnosis method for T-type three-level inverters based on multimodal deep residual filter network. IEEE Trans. Ind. Electron. 2022, 70, 10669–10679. [Google Scholar] [CrossRef]
- Choi, U.M.; Jeong, H.G.; Lee, K.B.; Blaabjerg, F. Method for detecting an open-switch fault in a grid-connected NPC inverter system. IEEE Trans. Power Electron. 2011, 27, 2726–2739. [Google Scholar] [CrossRef]
- Choi, U.M.; Lee, K.B.; Blaabjerg, F. Diagnosis and tolerant strategy of an open-switch fault for T-type three-level inverter systems. IEEE Trans. Ind. Appl. 2013, 50, 495–508. [Google Scholar] [CrossRef]
- Liang, Y.; Wang, R.; Hu, B. Single-switch open-circuit diagnosis method based on average voltage vector for three-level T-type inverter. IEEE Trans. Power Electron. 2020, 36, 911–921. [Google Scholar] [CrossRef]
- Wang, K.; Tang, Y.; Zhang, C.J. Open-circuit fault diagnosis and tolerance strategy applied to four-wire T-type converter systems. IEEE Trans. Power Electron. 2018, 34, 5764–5778. [Google Scholar] [CrossRef]
- Naseri, F.; Schaltz, E.; Lu, K.; Farjah, E. Real-time open-switch fault diagnosis in automotive permanent magnet synchronous motor drives based on Kalman filter. IET Power Electron. 2020, 13, 2450–2460. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. Multiple open-circuit faults diagnosis in back-to-back converters of PMSG drives for wind turbine systems. IEEE Trans. Power Electron. 2014, 30, 2689–2702. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Cui, P.; Lu, Y.; Lu, M.; Yu, Y. A fast and robust open-switch fault diagnosis method for variable-speed PMSM system. IEEE Trans. Power Electron. 2020, 36, 2598–2610. [Google Scholar] [CrossRef]
- Wang, B.; Li, Z.; Bai, Z.; Krein, P.T.; Ma, H. A voltage vector residual estimation method based on current path tracking for T-type inverter open-circuit fault diagnosis. IEEE Trans. Power Electron. 2021, 36, 13460–13477. [Google Scholar] [CrossRef]
- Huang, S.; Tan, K.K.; Lee, T.H. Fault diagnosis and fault-tolerant control in linear drives using the Kalman filter. IEEE Trans. Power Electron. 2012, 59, 4285–4292. [Google Scholar] [CrossRef]
- Yong, C.; Zhang, J.; Chen, Z. Current observer-based online open-switch fault diagnosis for voltage-source inverter. ISA Trans. 2020, 99, 445–453. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, J.; Chen, C.; Tian, X.; Liu, G. Disturbance-observer-based direct torque control of five-phase permanent magnet motor under open-circuit and short-circuit faults. IEEE Trans. Ind. Electron. 2020, 68, 11907–11917. [Google Scholar] [CrossRef]
- Shao, S.; Wheeler, P.W.; Clare, J.C.; Watson, A.J. Fault detection for modular multilevel converters based on sliding mode observer. IEEE Trans. Power Electron. 2013, 28, 4867–4872. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Hu, Y.; Chai, Y.; Wang, H.; Yang, X.; Ma, M.; Zheng, W.X. Multiple open-switch fault diagnosis for three-phase four-leg inverter under unbalanced loads via interval sliding mode observer. IEEE Trans. Power Electron. 2024, 39, 7607–7619. [Google Scholar] [CrossRef]
- Zhuo, S.; Xu, L.; Gaillard, A.; Huangfu, Y.; Paire, D.; Gao, F. Robust open-circuit fault diagnosis of multi-phase floating interleaved DC–DC boost converter based on sliding mode observer. IEEE Trans. Transp. Electrif. 2019, 5, 638–649. [Google Scholar] [CrossRef]
- Sun, T.; Chen, C.; Wang, S.; Zhang, B.; Fu, Y.; Li, J. Inverter open circuit fault diagnosis based on residual performance evaluation. IET Power Electron. 2023, 16, 2560–2576. [Google Scholar] [CrossRef]
- Xu, S.; Huang, W.; Wang, H.; Zheng, W.; Wang, J.; Chai, Y.; Ma, M. A simultaneous diagnosis method for power switch and current sensor faults in grid-connected three-level NPC inverters. IEEE Trans. Power Electron. 2022, 38, 1104–1118. [Google Scholar] [CrossRef]
- Xu, S.; Xu, X.; Du, H.; Wang, H.; Chai, Y.; Zheng, W.X.; Chen, H. Comprehensive diagnosis strategy for power switch, grid-side current sensor, DC-link voltage sensor faults in single-phase three-level rectifiers. IEEE Trans. Circuits Syst. I Regul. Pap. 2024, 71, 3343–3356. [Google Scholar] [CrossRef]
- Wang, B.; Li, Z.; Bai, Z.; Krein, P.T.; Ma, H. Real-time diagnosis of multiple transistor open-circuit faults in a T-type inverter based on finite-state machine model. CPSS Trans. Power Electron. Appl. 2020, 5, 74–85. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching State | Pole Voltage | ||||
|---|---|---|---|---|---|
| 1 | 0 | 1 | 0 | ||
| 0 | 1 | 1 | 0 | 0 | 0 |
| 0 | 1 | 0 | 1 | − | − |
| 0 | 0 | 0 | 1 | − | − |
| 0 | 0 | 1 | 0 | 0 | |
| 0 | 1 | 0 | 0 | − | 0 |
| 1 | 0 | 0 | 0 | ||
| 0 | 0 | 0 | 0 | − | |
| Switching State | Pole Voltage | Operating State |
|---|---|---|
| 1 , 0 , 1 , 0 | [P] | |
| 0 , 1 , 1 , 0 | 0 | [O] |
| 0 , 1 , 0 , 1 | − | [N] |
| Parameter | Value |
|---|---|
| DC side voltage | |
| DC side capacitance | |
| Sampling time | |
| Three-phase filter inductance L | |
| Three-phase load resistance R |
| Parameter | Value |
|---|---|
| DC side voltage | |
| Rated voltage | |
| Rated output power P | |
| Rated current I | |
| Filter inductance L | |
| Load resistance R |
| Method | Research Plant | Single/ Multiple Fault | Diagnosis Variable | Hardware/ Calculation Cost | Robustness |
|---|---|---|---|---|---|
| [15] | T23L inverter | Multiple | , , | No/High | High |
| [33] | T23L inverter | Multiple | , , switching state | Yes/Low | Low |
| [23] | T23L inverter | Single | , , , and etc. | Yes/Low | High |
| [19] | T23L inverter | Single | , and etc. | No/Low | Low |
| [18] | T23L inverter | Single | Yes/Low | low | |
| [32] | SPTL inverter | Single | , | No/Low | High |
| [31] | NPC inverter | Single | No/Low | High | |
| The proposed method | T23L inverter | Multiple | No/Low | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Shang, Z.; Gao, S.; Zhao, S.; Chen, C.; Wang, K. Open-Circuit Fault Diagnosis for T-Type Three-Level Inverter via Improved Adaptive Threshold Sliding Mode Observer. Appl. Sci. 2025, 15, 6063. https://doi.org/10.3390/app15116063
Zhang X, Shang Z, Gao S, Zhao S, Chen C, Wang K. Open-Circuit Fault Diagnosis for T-Type Three-Level Inverter via Improved Adaptive Threshold Sliding Mode Observer. Applied Sciences. 2025; 15(11):6063. https://doi.org/10.3390/app15116063
Chicago/Turabian StyleZhang, Xiaoyan, Ziyan Shang, Song Gao, Suping Zhao, Chaobo Chen, and Kun Wang. 2025. "Open-Circuit Fault Diagnosis for T-Type Three-Level Inverter via Improved Adaptive Threshold Sliding Mode Observer" Applied Sciences 15, no. 11: 6063. https://doi.org/10.3390/app15116063
APA StyleZhang, X., Shang, Z., Gao, S., Zhao, S., Chen, C., & Wang, K. (2025). Open-Circuit Fault Diagnosis for T-Type Three-Level Inverter via Improved Adaptive Threshold Sliding Mode Observer. Applied Sciences, 15(11), 6063. https://doi.org/10.3390/app15116063