To conduct a comprehensive analysis of the positioning environment in pig farms, it is generally recommended to deploy positioning base stations along the corridor or on the walls. This study proposes multiple deployment schemes for base stations and evaluates their impact on positioning results by measuring the Dilution of Precision (DOP) value through both simulation experiments and real-world tests. The height of the positioning terminal is set at 100 cm.
4.1. Simulation and Analysis
- (1)
Different heights of base stations
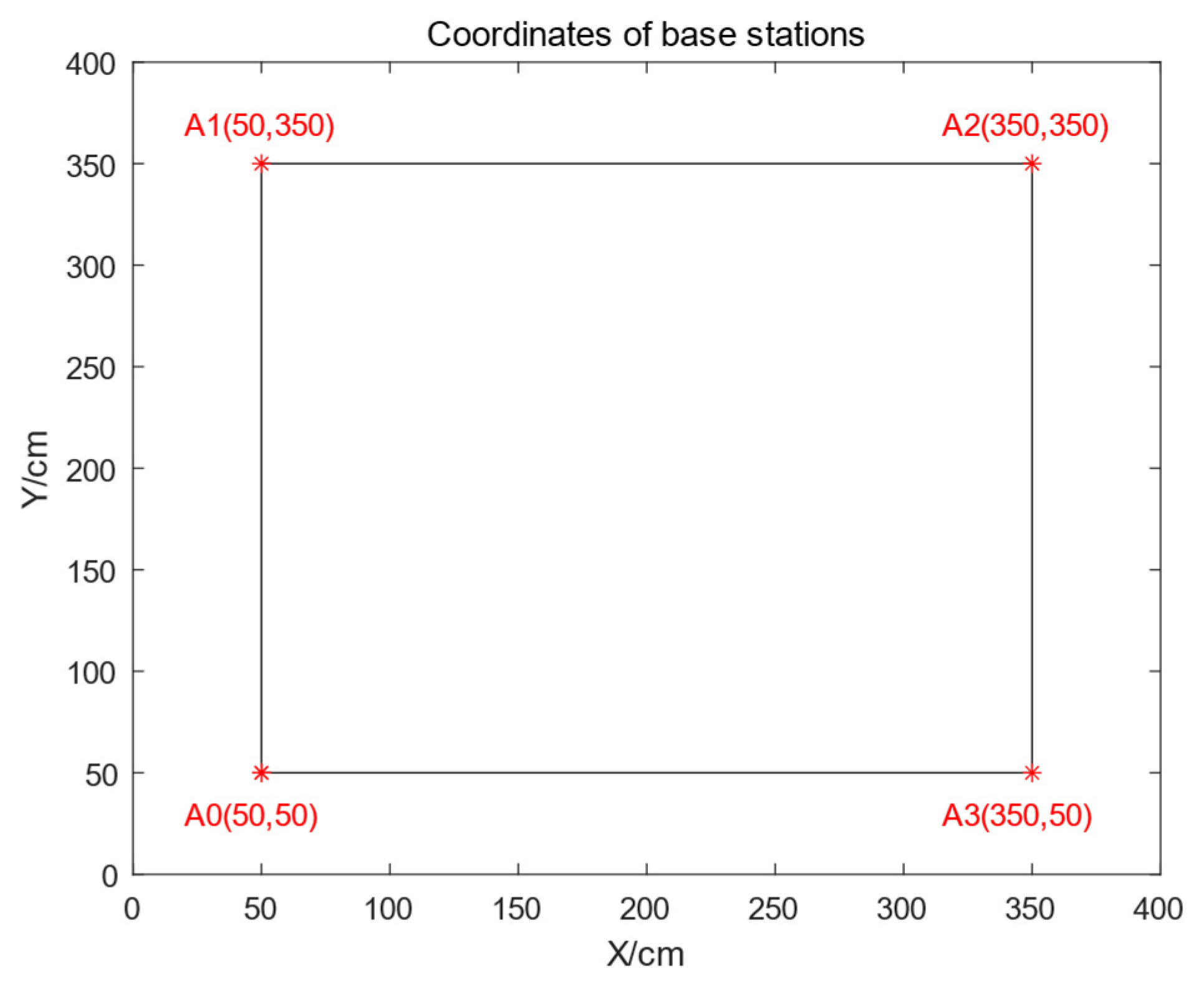
A comparative analysis is conducted to examine the impact of varying base station heights on positioning accuracy while maintaining fixed base station spacing and deployment shape conditions. The layout of the base stations is illustrated in
Figure 1, wherein A
0 to A
3 represent the respective coordinate positions of each base station. The base stations are set at heights of 0 cm, 75 cm, 125 cm, 175 cm, 225 cm, and 275 cm, respectively.
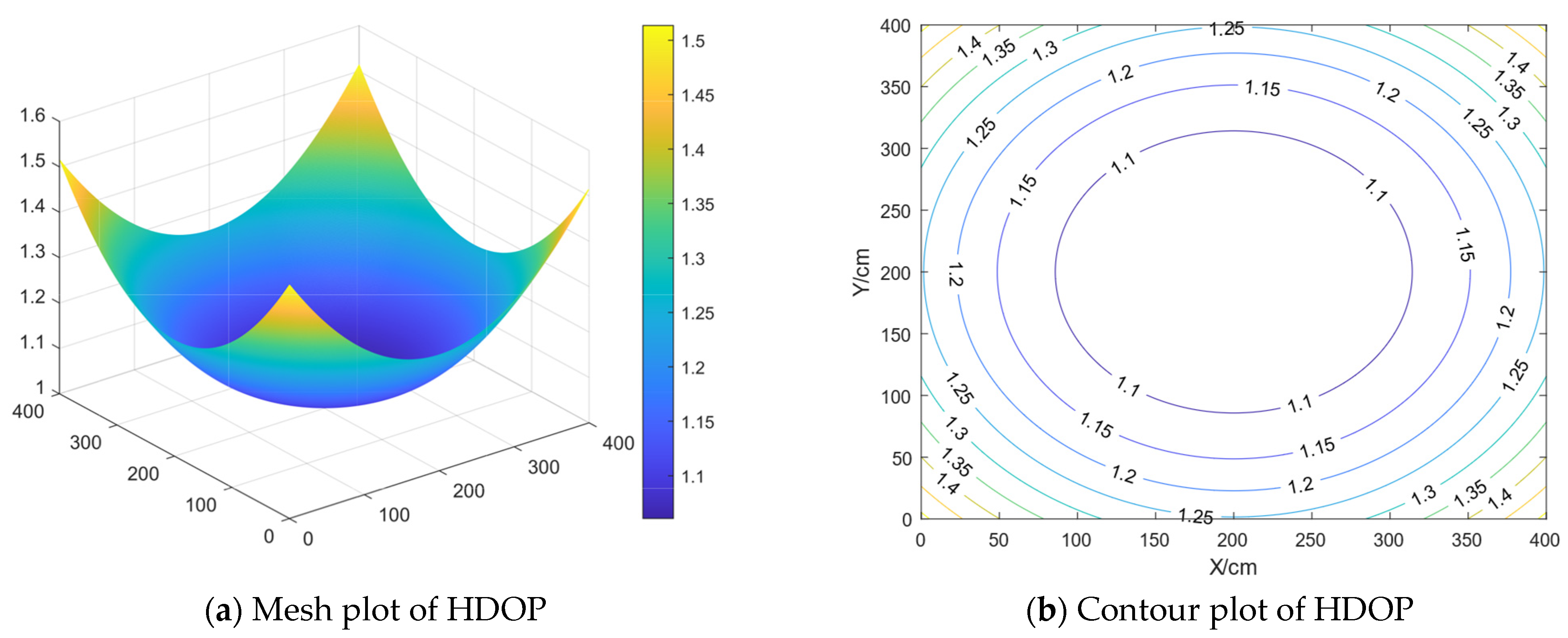
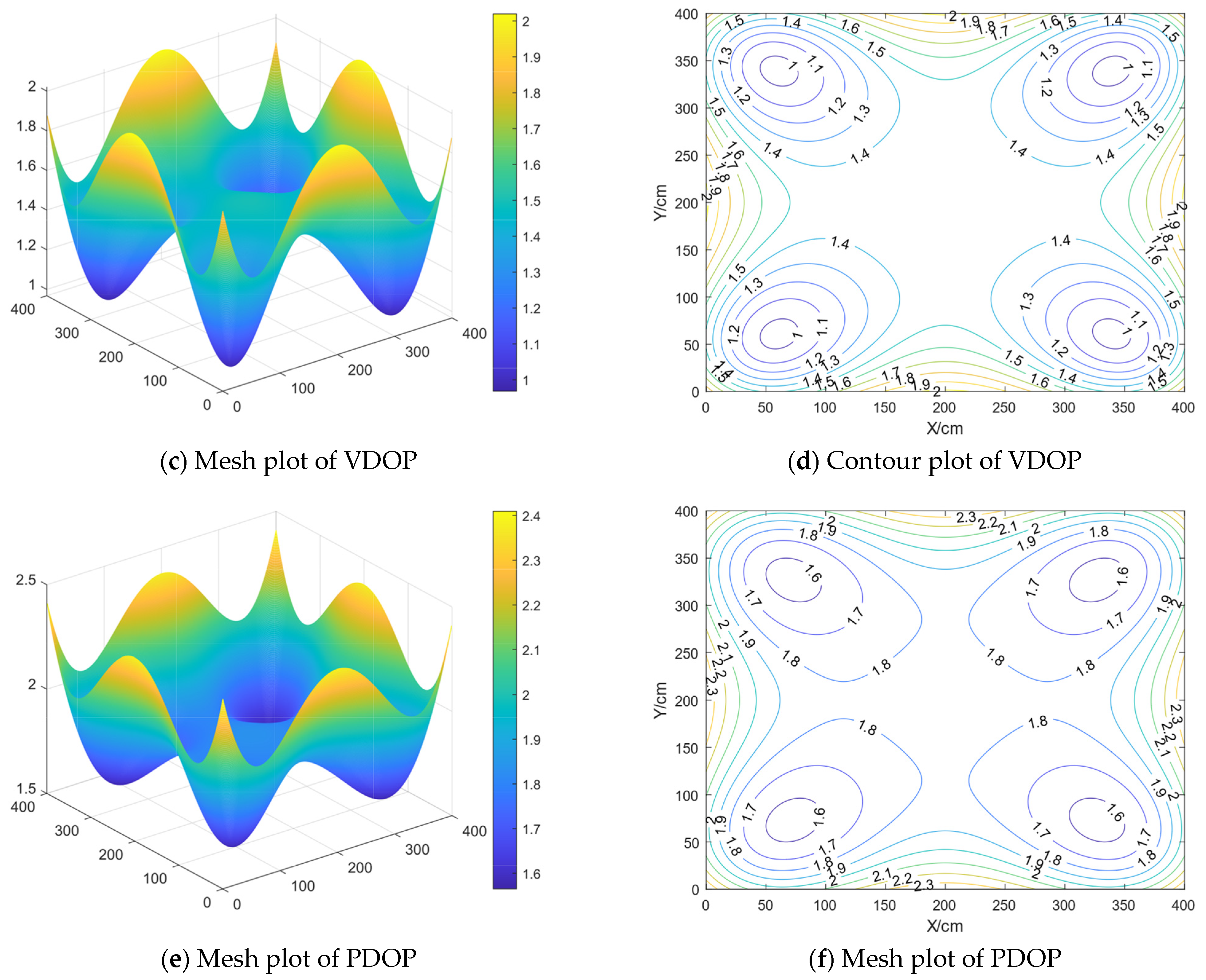
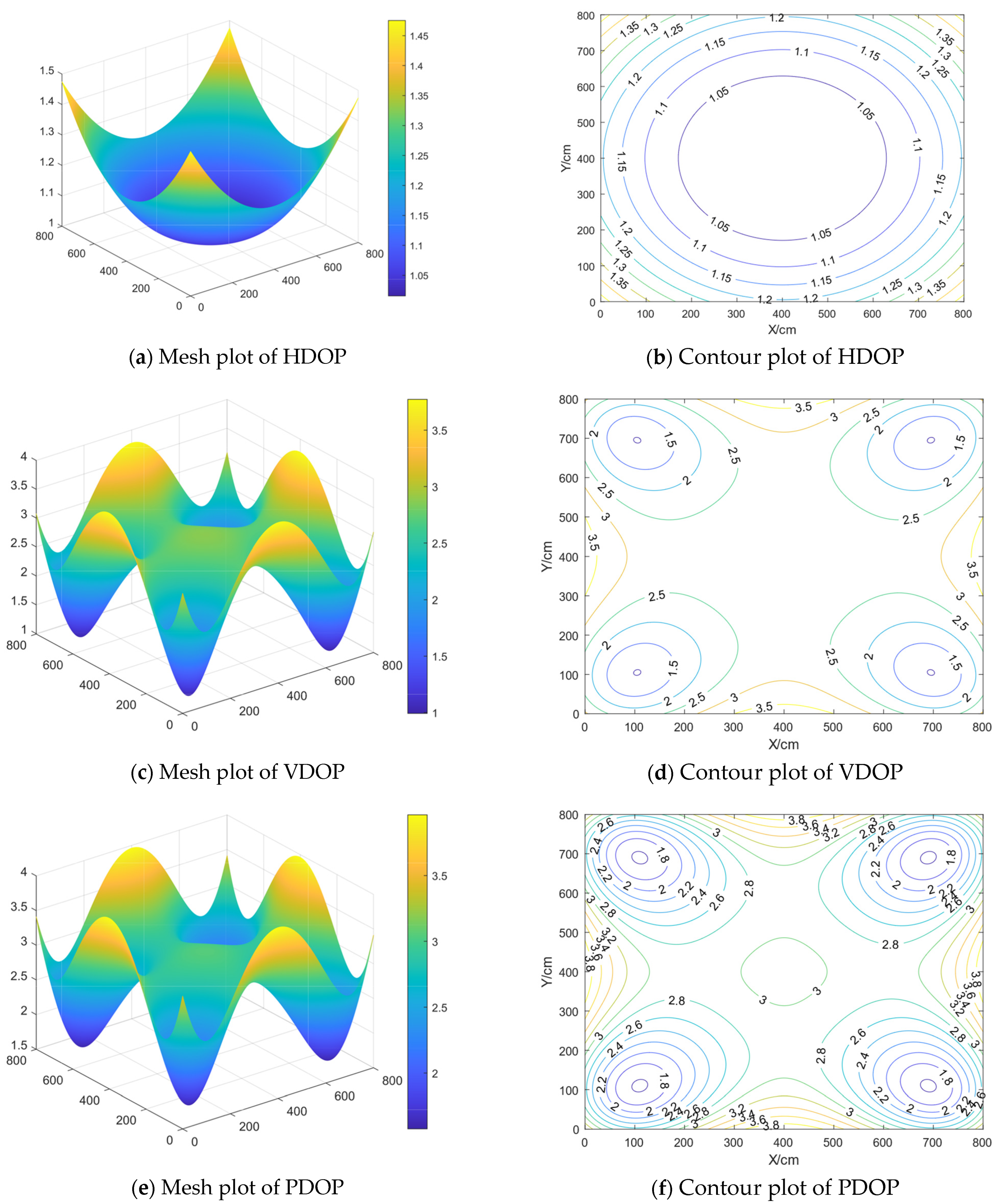
The HDOP value near the center point location is relatively smaller within the enclosed area of the base stations, as depicted in
Figure 2 and supported by statistical data. Conversely, the VDOP and PDOP values tend to be larger in this region. Near the base stations, however, both VDOP and PDOP values are smaller compared to those near the center point location. Outside the closed area surrounded by the base stations, all DOP values increase with distance.
The following can be obtained through
Table 1:
The maximum, minimum, and average DOP values of Scenarios a and b are equal to those of the other scenarios. HDOP exhibits the smallest maximum, minimum, and average values among all DOPs, while VDOP and PDOP demonstrate the largest maximum, minimum, and average values. Conversely, Scenario f exhibits the highest maximum, minimum, and average HDOP values compared to VDOP and PDOP. The differences in maximum HDOP values among scenarios do not exceed 0.3; however, there are greater disparities in maximum VDOP and PDOP values between Scenarios b and c compared to other scenarios.
In summary, given a fixed shape and spacing of the base stations’ arrangement, appropriate adjustment of the height difference between the base stations and positioning point can effectively reduce DOP values. Specifically, increasing the height of the base stations will result in larger HDOP values but smaller VDOP and PDOP values. The optimal height range for the base stations is between 175 cm and 275 cm.
- (2)
Different distances of base station
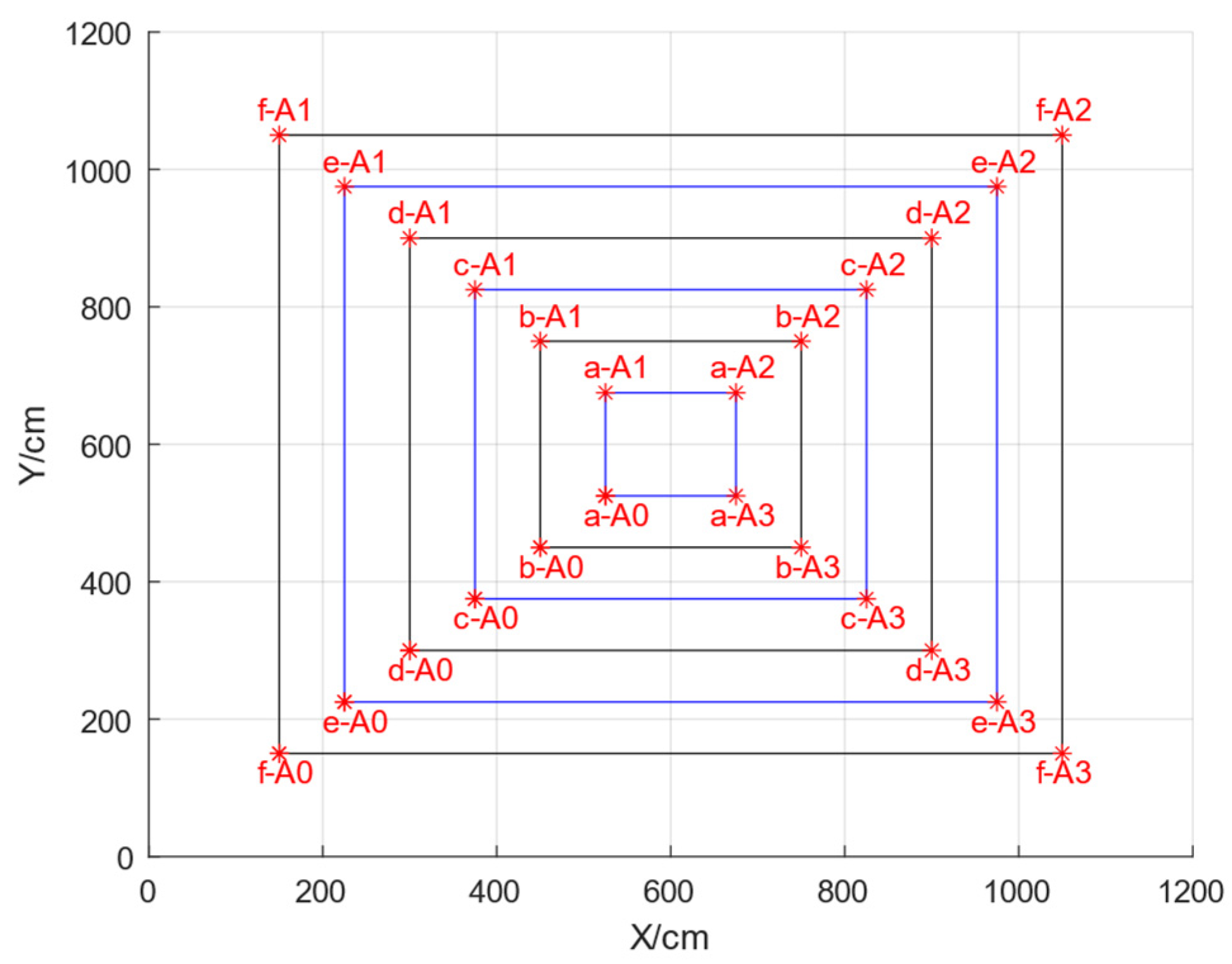
A comparative analysis was conducted to examine the impact of varying distances between base stations on positioning accuracy, considering a fixed square deployment pattern with the base station height set at 175 cm. The spacing between base station deployments were as follows: 150 cm, 300 cm, 450 cm, 600 cm, 750 cm, and 900 cm. The layout of the base stations is illustrated in
Figure 3, wherein A
0 to A
3 represent the respective coordinate positions of each base station. a, b, c, d, e, f, represent scenarios with the base stations spacing of 150, 300, 450, 600, 750, and 900, respectively.
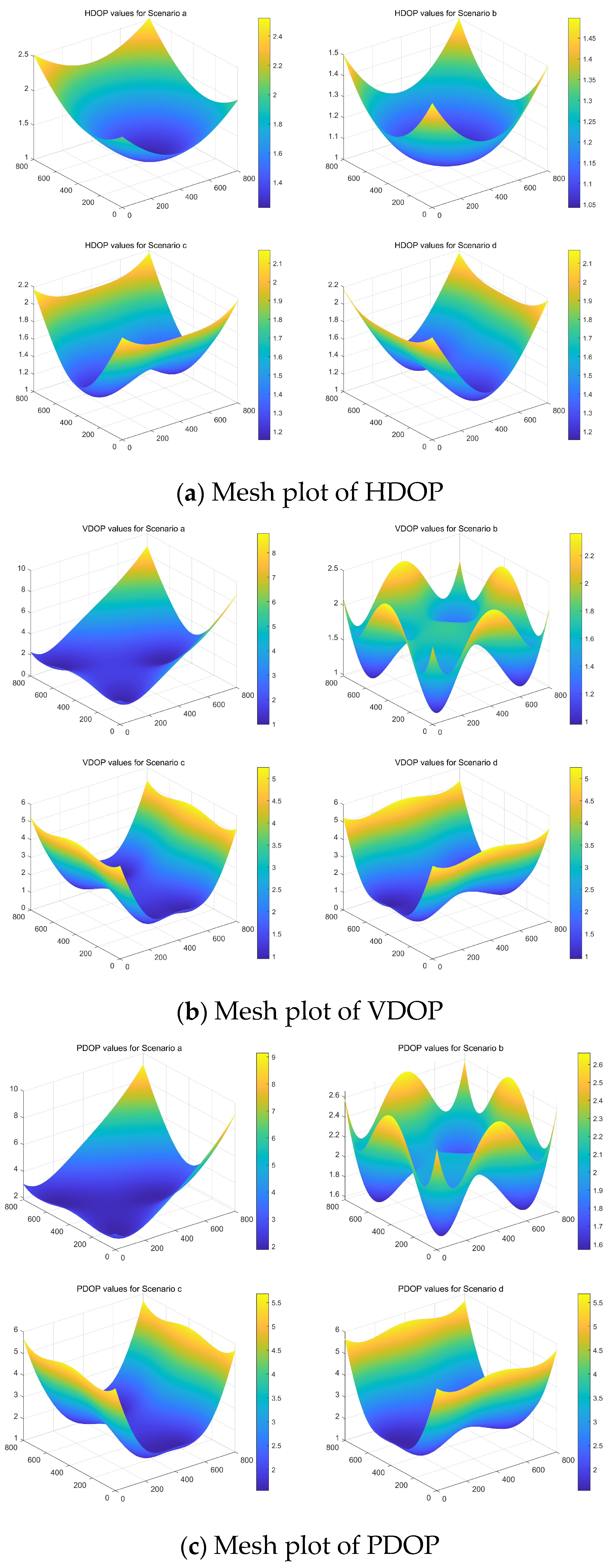
Based on
Figure 4 and statistical analysis, within the square area surrounded by the base stations, Schemes b to f exhibit a smaller HDOP value as the center point gets closer, while the VDOP and PDOP values increase. As for proximity to the base stations, the VDOP and PDOP values decrease while the VDOP values increase as the center point approaches. The scheme shows that when the distance between base stations is 150 cm, all three DOP values are smaller when closer to the center. Outside of this enclosed area, the DOP values increase.
As the side length of the base stations gets bigger and bigger, the HDOP value decreases gradually, and the VDOP and PDOP values increase gradually; for Scenario f, the maximum, minimum, and average values of HDOP are the smallest, and the maximum and average values of VDOP and PDOP are the largest, but the minimum values of VDOP and PDOP for the six scenarios are basically the same.
The following summary can be obtained: when the base stations’ height and layout shape are fixed, appropriate adjustment of the base station spacing can reduce the DOP value; the larger the range of the base stations, the HDOP maximum and minimum values will be smaller; the VDOP and PDOP minimum value does not change much; the base stations’ spacing in 150 cm DOP value is relatively large; and the spacing in the range of 300 cm and above is better.
- (3)
Different shapes of the base station arrangements
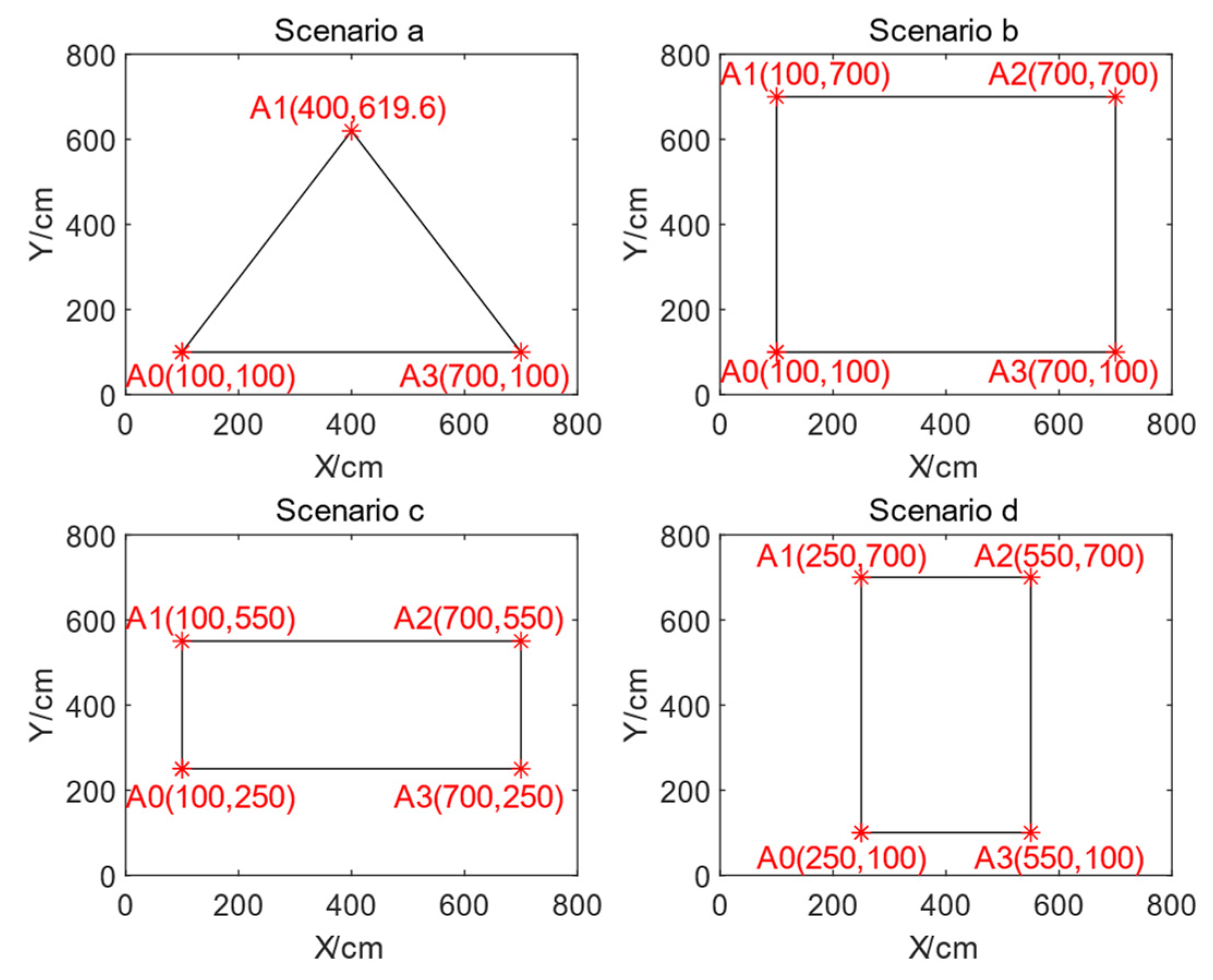
Comparison and analysis of the impact of different base station layouts on positioning accuracy are conducted under fixed base station spacing and height conditions. The base stations are arranged in four scenarios: an equilateral triangle with a side length of 600 cm (Scenario a), a square with a side length of 600 cm (Scenario b), a rectangle measuring 600 cm in length and 300 cm in width (Scenario c), and a rectangle measuring 300 cm in length and 600 cm in width (Scenario d). The layout and coordinates of the base stations are illustrated in
Figure 5, A
0 to A
3 are the location coordinates of the base stations in the plan.
From
Figure 6 the HDOP values exhibit a decreasing trend towards the central point location within the enclosed area formed by the base stations, while they increase in proximity to the base stations. Similarly, both VDOP and PDOP values are observed to decrease near the base stations. Conversely, outside this enclosed area, DOP values demonstrate an increasing pattern with greater distances from the center.
This can be obtained through
Table 3:
Scenario b, when the base stations are laid out as a square, the DOP value is the smallest. In scenario a, when the equilateral triangle, the DOP value is the largest, and when the aspect ratio of rectangles is the inverse of each other, the DOP values are the same.
The conclusion can be drawn that when the base stations are deployed in a square configuration, the DOP value is minimized, resulting in optimal positioning accuracy. In comparison, deploying the base stations in a rectangular arrangement yields slightly higher DOP values for the longer side than for the shorter side, indicating relatively higher accuracy along the longer side.
4.2. Analysis of Real Measurement Experiments
The actual measurement experiments were conducted using LinkTrack P-A module hardware, which was utilized for both static fixed-point localization and dynamic following localization in an unobstructed open field enclosed by the base stations. Additionally, the size of the test site was adjusted based on the experimental variables required.
- (1)
Static positioning analysis
For the square quadrilateral area surrounded by four base stations, measurements were taken at points located approximately 75 cm from each base station, as well as at the midpoint between two adjacent base stations and the midpoint of the quadrilateral itself, resulting in a total of thirteen data points. Similarly, for the square trilateral area enclosed by three base stations, measurements were obtained near 75 cm from each base stations, at the midpoint between two adjacent base stations, and at the centroid of the triangle formed by these three stations, yielding a total of ten data points. Each fixed point was sampled within a duration of three minutes with a sampling frequency set to 10 Hz.
- a.
Different heights of base stations
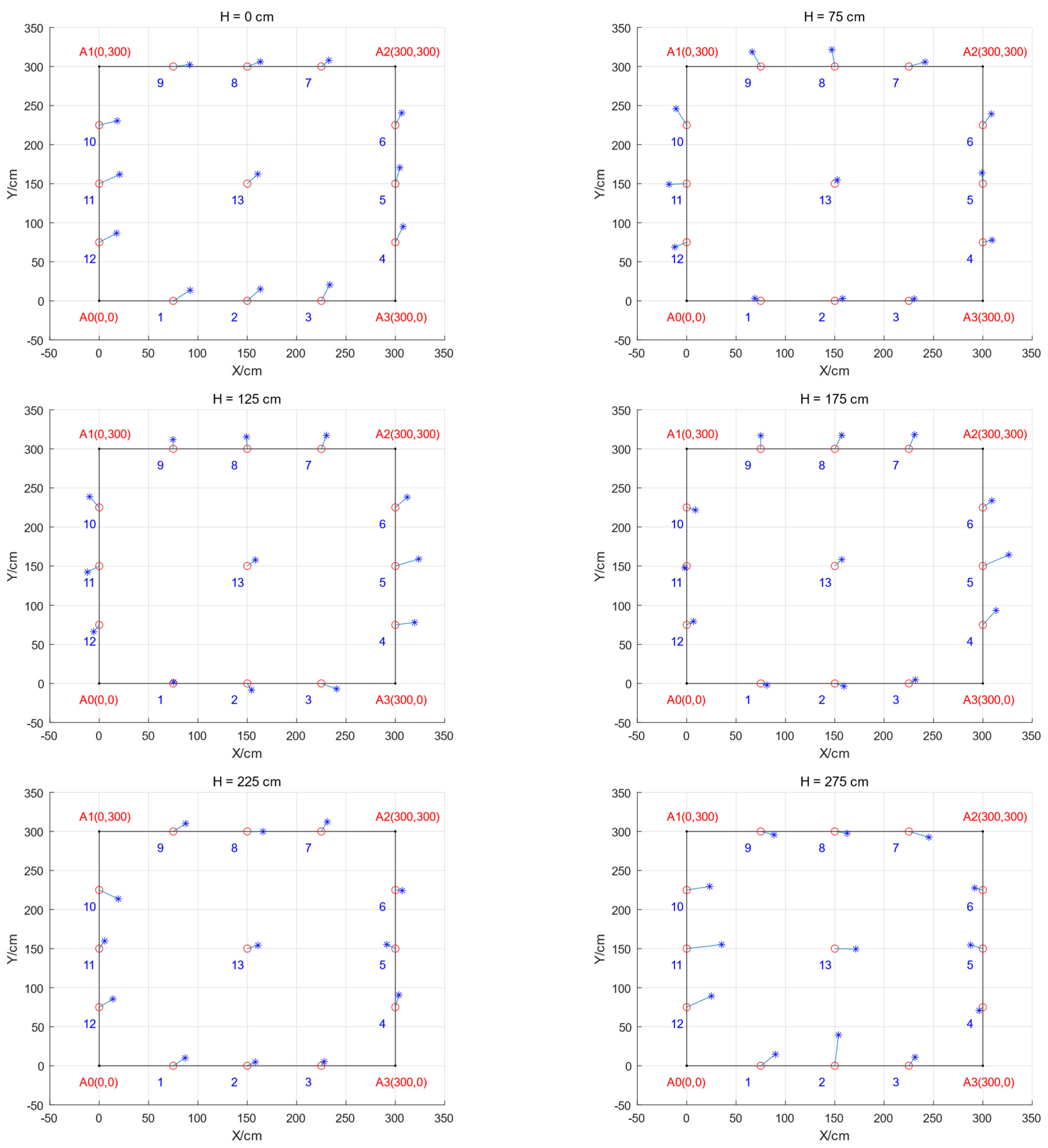
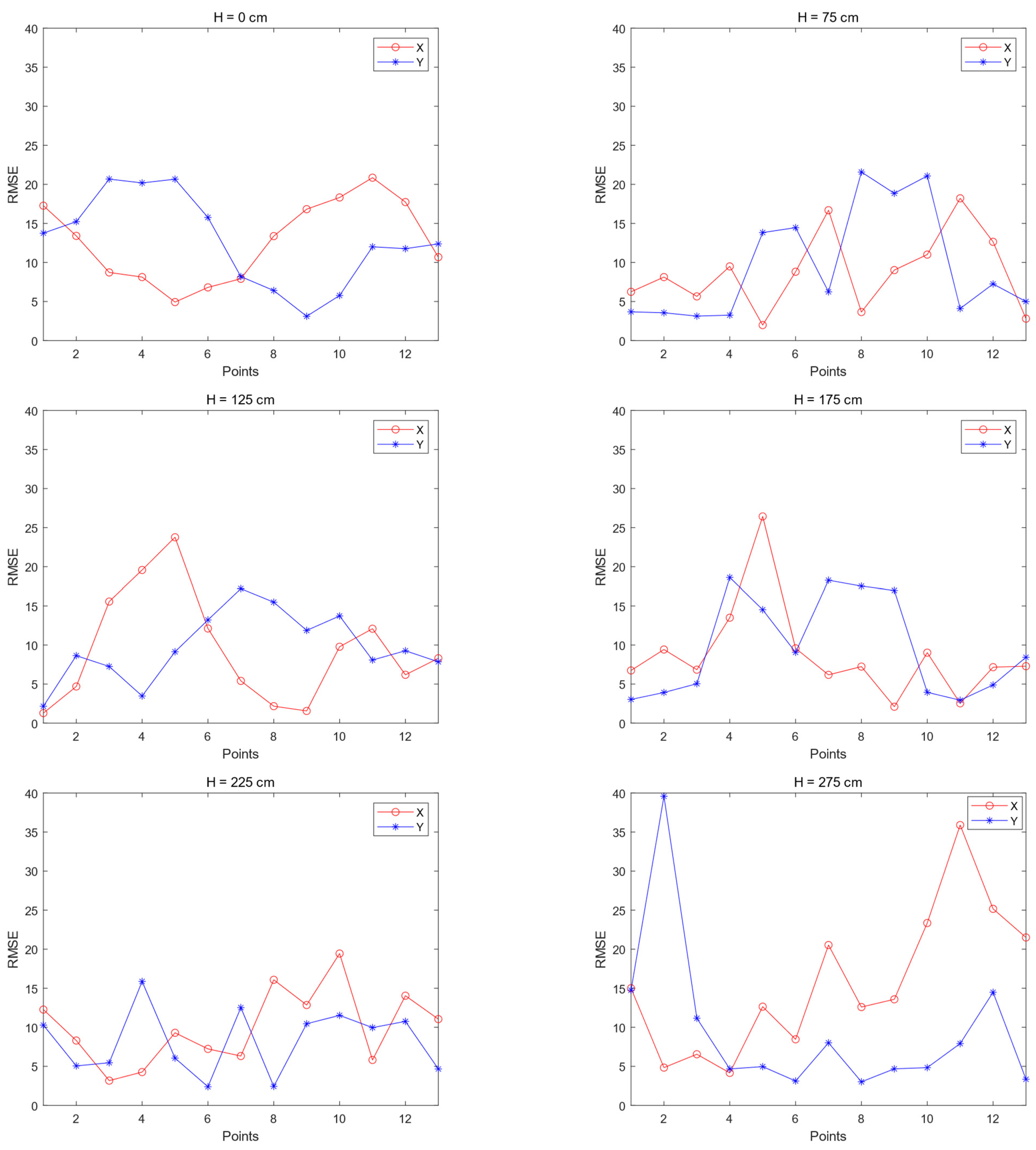
The UWB positioning effect is evaluated by enclosing the base stations in a square configuration with a spacing of 300 cm while varying the height of the base station at intervals of 0 cm, 75 cm, 125 cm, 175 cm, 225 cm, and 275 cm. The layout of the base stations are illustrated in
Figure 7, wherein A
0 to A
3 represent the respective coordinate positions of each base station.
Figure 7,
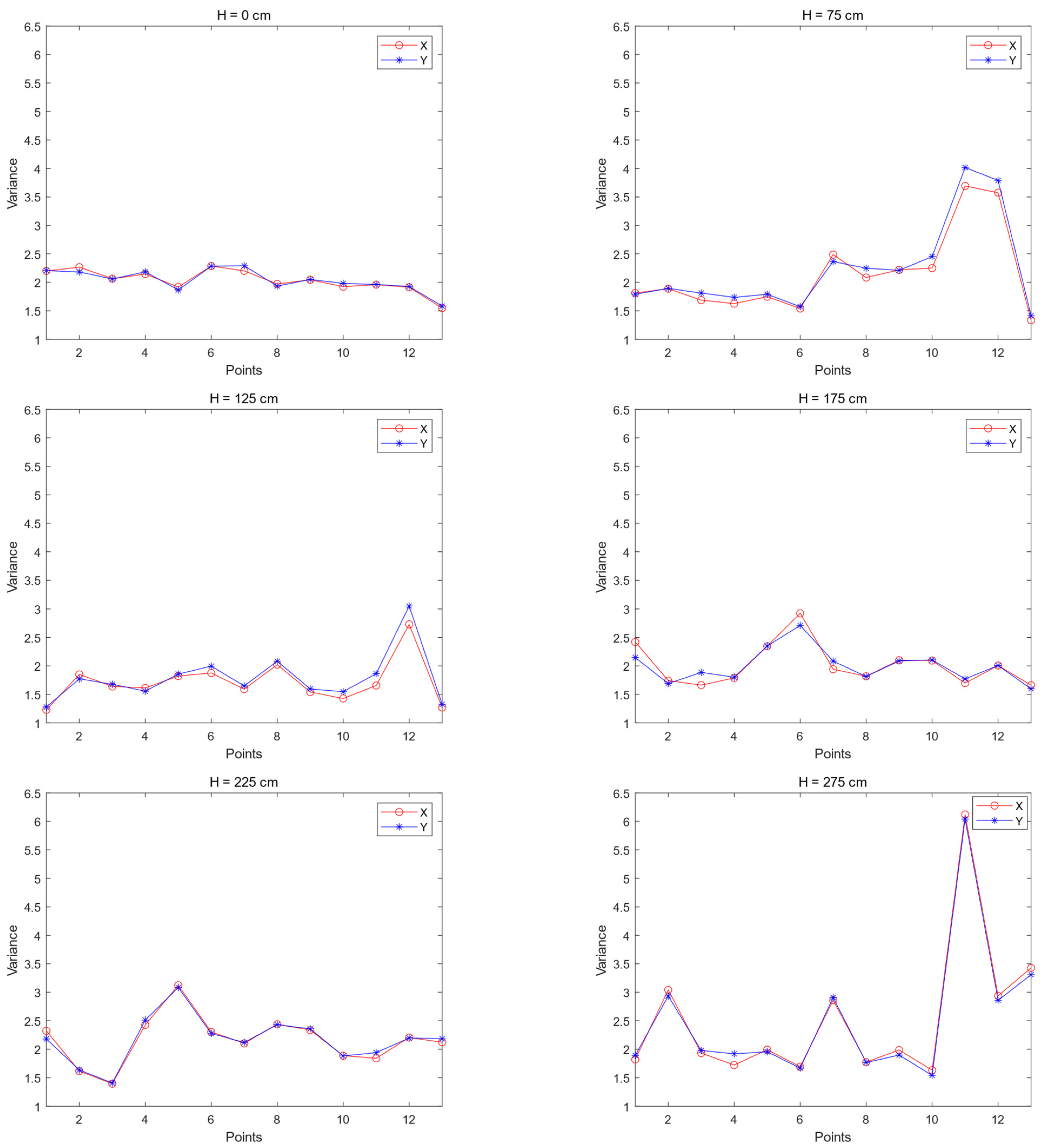
Figure 8 and
Figure 9 show that when H is 0 cm or 275 cm, the deviation of each point is larger; when H is 175 cm or 225 cm, the deviation is smaller, and the root-mean-square error is within 15 for more points; when H is 125 cm or 175 cm, the variance is smaller for both, and within 2 for more points; when H is 275 cm, the variance is larger for more points. The same height and point location show that the X and Y coordinate variances are approximate.
Table 4 shows that H is 75 cm for the X maximum value and the average value of the smallest, H is 125 cm for the X minimum value of the smallest, H is 0 cm for the X minimum value of the largest, H is 275 cm for the average value of the largest, H is 225 cm for the Y maximum value of the smallest, H is 125 cm for the Y minimum value and the average value of the smallest, H is 275 cm for the Y maximum value for the average value of the largest, and H is 0 cm for the Y minimum value of the smallest.
Table 5 shows that when H is 0 cm, X maximum value and average value are minimum; when H is 125 cm, the X minimum value is minimum; when H is 275 cm, the X maximum value and average value are maximum; when H is 175 cm, the X minimum value is maximum; when H is 0 cm, the Y maximum value and average value is minimum; when H is 125 cm, the Y minimum value is minimum; when H is 275 cm, the Y maximum value, average value is maximum and the Y minimum value is maximum. The difference between the X and Y variance values at the same point in the same height case is not significant.
- b.
Different distance of base stations
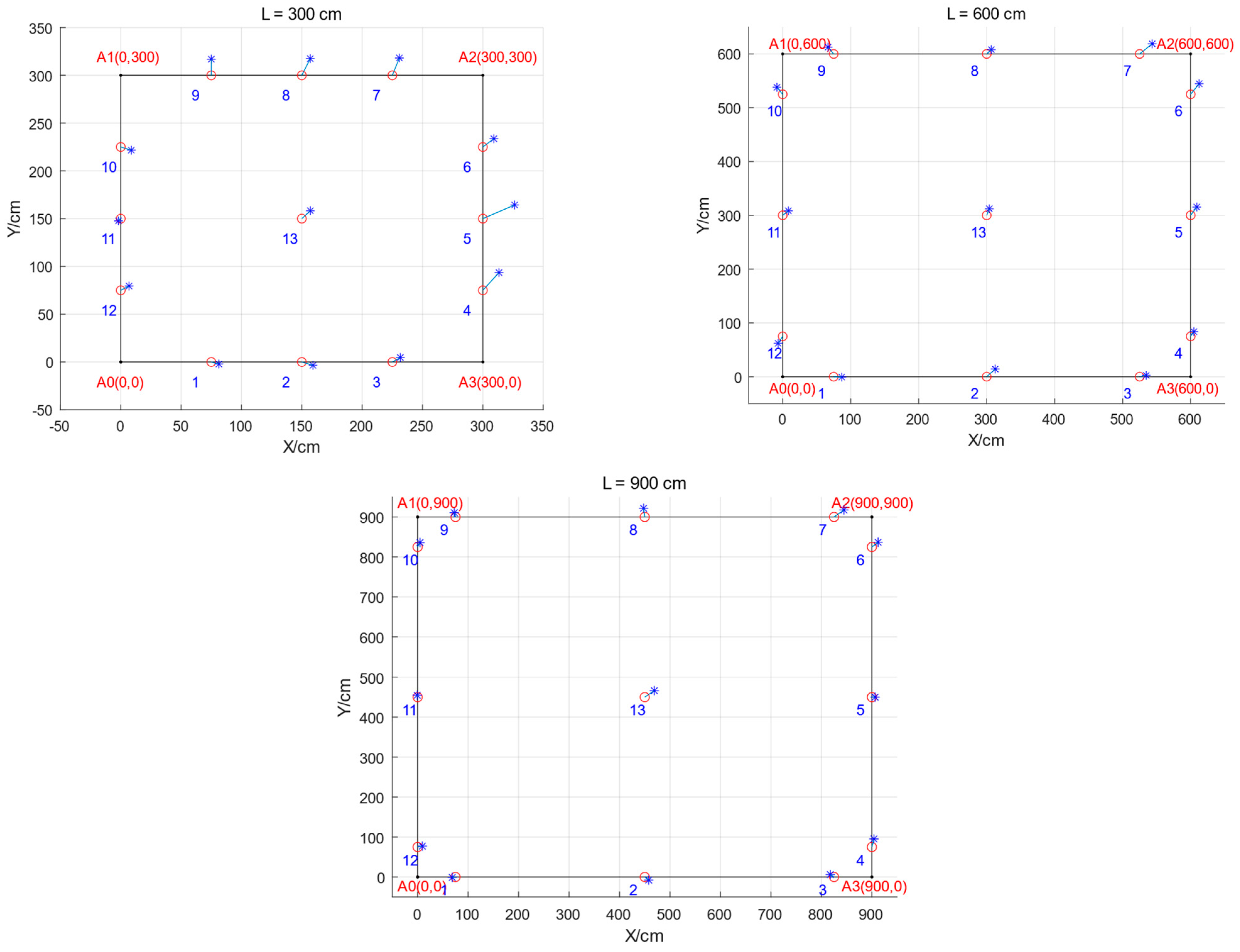
Comparison and analysis of the impact of different base station spacing on positioning accuracy is conducted in the case of a base station height of 175 cm and a fixed square deployment pattern. Due to significant fluctuations observed when deploying base stations closer together, calibration becomes impractical. Therefore, the base station deployment spacings considered are 300 cm, 600 cm, and 900 cm squares. The layout of the base stations are illustrated in
Figure 10, wherein A
0 to A
3 represent the respective coordinate positions of each base station.
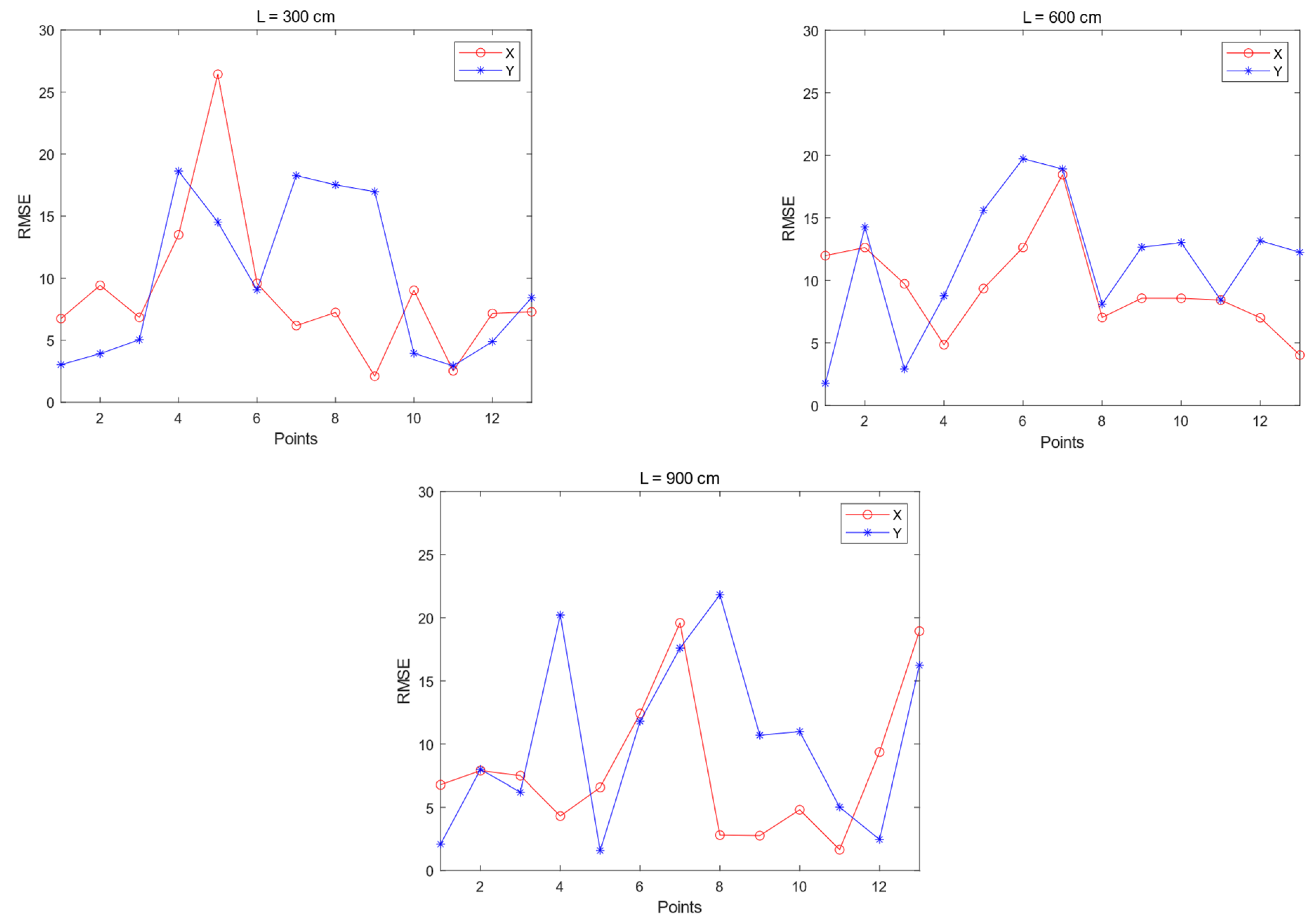
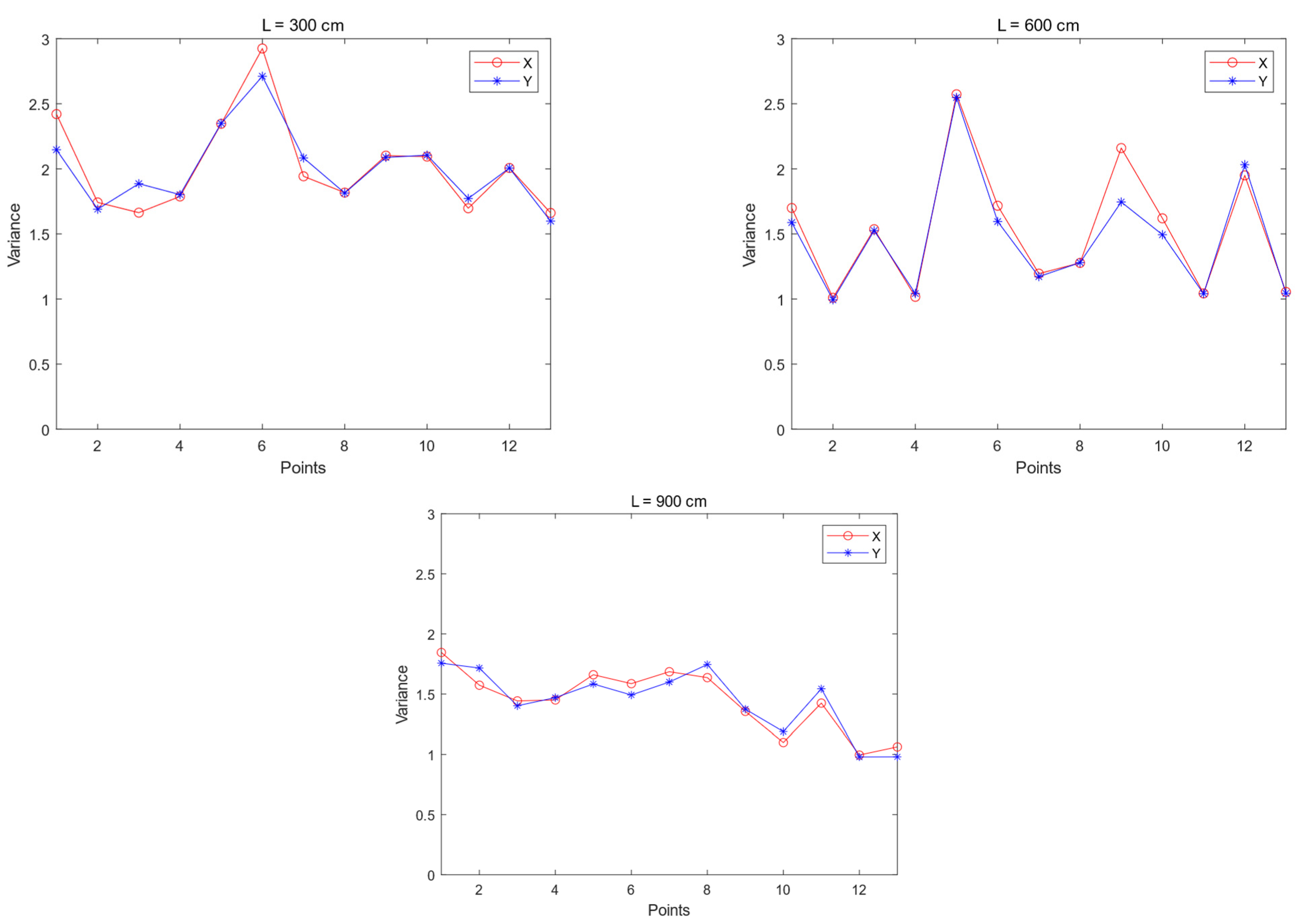
Figure 10,
Figure 11 and
Figure 12 show that there is not much difference in the root-mean-square error of each point of the three spacing cases. When L = 600 cm and 900 cm, the variance of each point is smaller, basically within 1.5; while when L = 300 cm, the variance of each point is above 1.5.
Table 6 shows that when L is 600 cm, the maximum value of X is the smallest; when L is 900 cm, the minimum value of X and the average value are the smallest; when L is 300 cm, the maximum value of Y is the smallest; when L is 900 cm, the minimum value of Y is the smallest; and when L is 600 cm, the average value of Y is the smallest.
Table 7 shows that when L is 900 cm, the X and Y maximum and minimum and average values are the smallest; with the same spacing, the X and Y variance value of the same point does not differ much. The larger the spacing, the smaller the variance, that is, the more stable the positioning.
- c.
Different shapes of base station arrangements
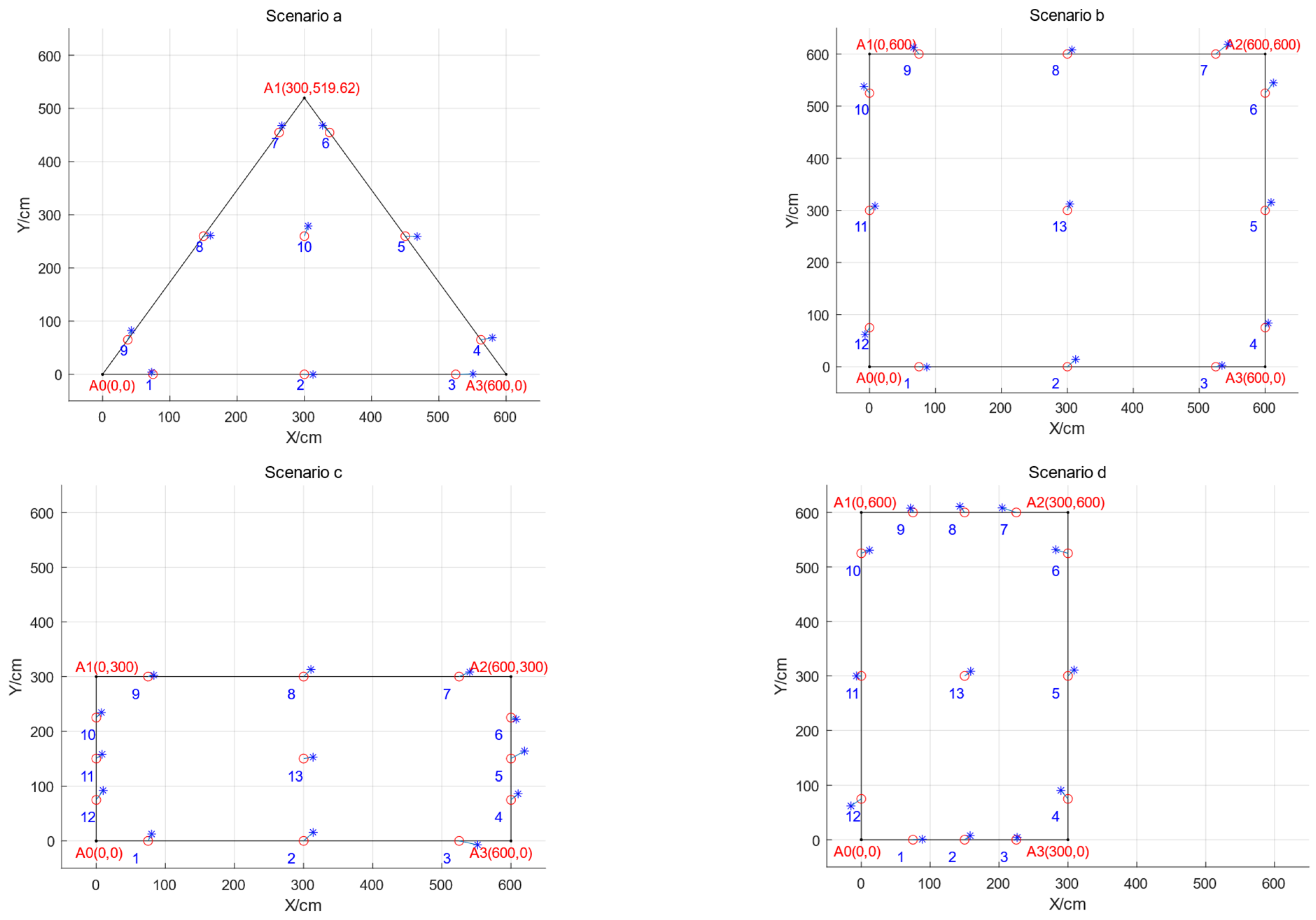
After comparison and analysis of the effect of different shapes of base station layout on positioning accuracy in the case of fixed base station spacing and base station height, the base station layout is set up as an equilateral triangle with a side length of 600 cm (Scenario a), a square with a side length of 600 cm (Scenario b), a rectangle with a length of 600 cm and a width of 300 cm (Scenario c), and a rectangle with a length of 300 cm and a width of 600 cm (Scenario d), respectively. The layout of the base stations are illustrated in
Figure 13, wherein A
0 to A
3 represent the respective coordinate positions of each base station.
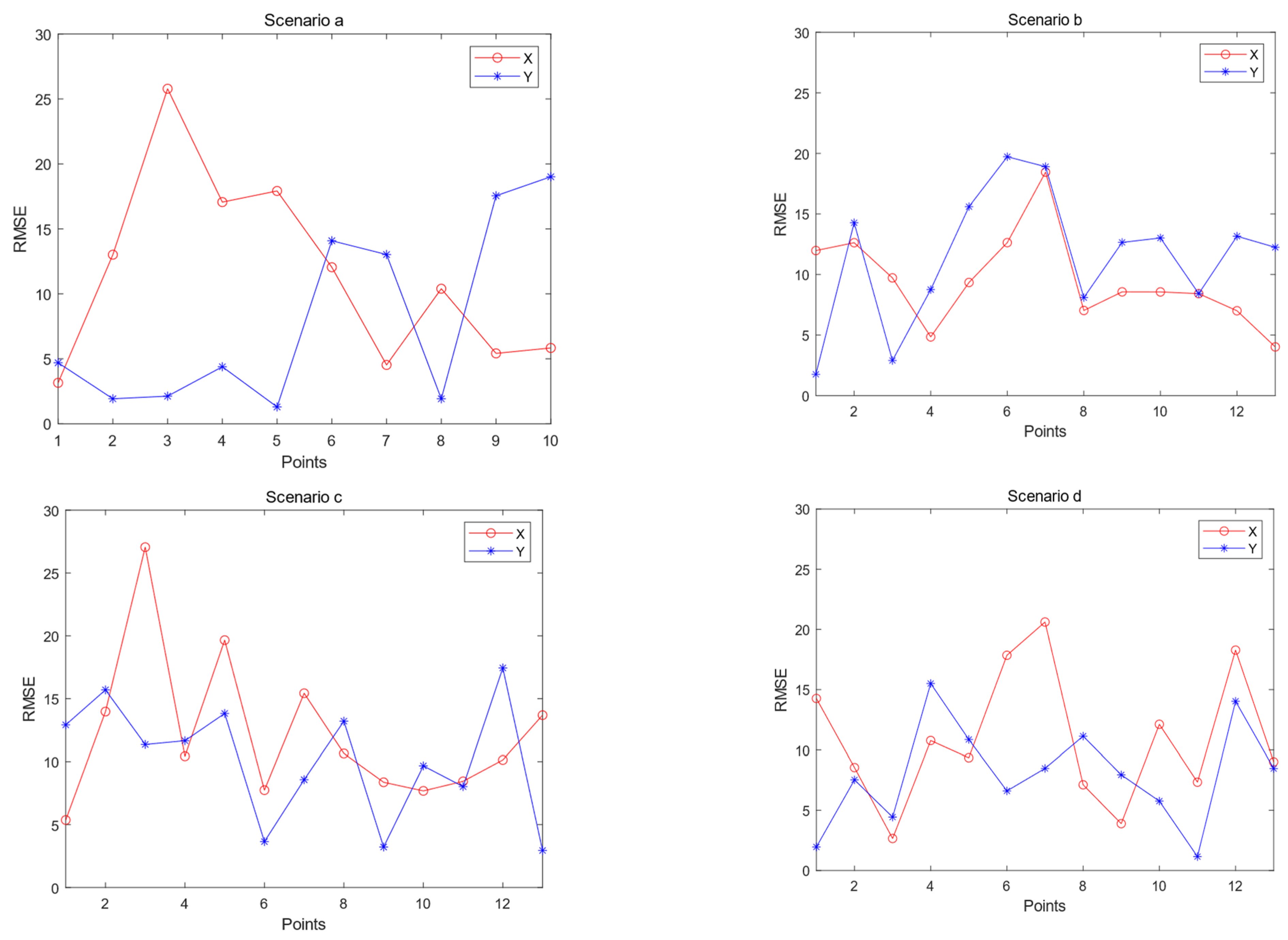
The results depicted In
Figure 13,
Figure 14 and
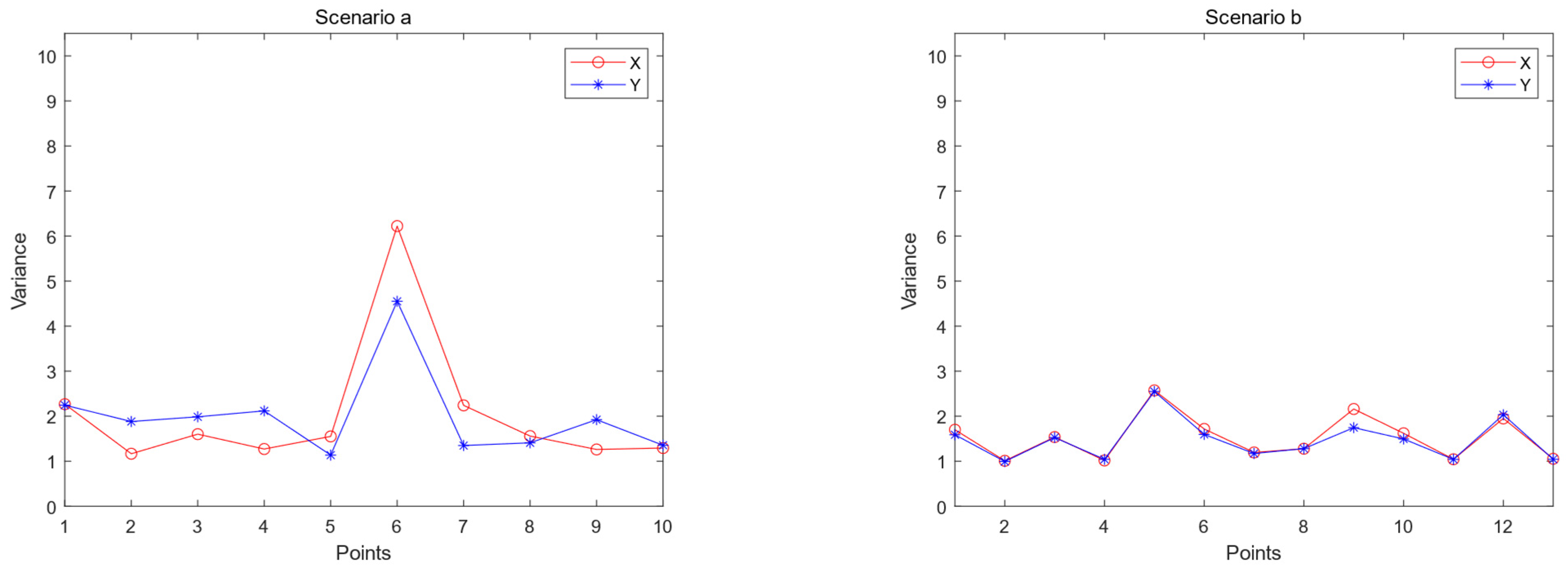
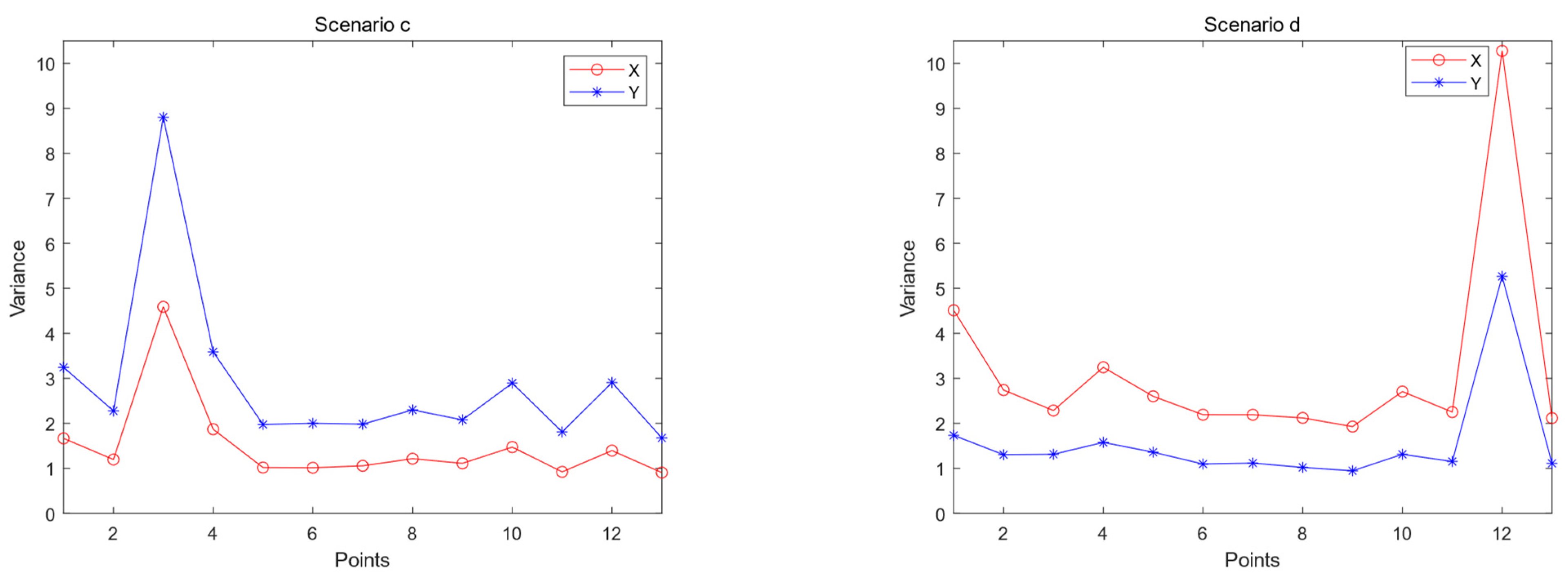
Figure 15 demonstrate that when the base stations are arranged in a square configuration, the majority of points exhibit a root-mean-square error below 15, with X and Y variances exhibiting close proximity and minimal values. Conversely, when the base stations are arranged as a triangle or rectangle, individual points display significantly larger root-mean-square errors and variances. Specifically, for rectangular configurations where the width exceeds the length, the X variance of identical points is smaller than their corresponding Y variance, whereas for rectangles where the length surpasses the width, the Y variance of identical points is smaller than their corresponding X variance.
Table 8 shows that the X maximum, minimum, and mean of Scenario c are all the largest, the X maximum and mean of the square are all the smallest, and the X minimum of Scenario d is the smallest; the maximum and mean of Y of Scenario b are all the largest, and the Y maximum, minimum and mean of Scenario c are all the smallest.
Table 9 shows that the maximum, minimum, and mean values of X and Y are minimum for Scenario b; the maximum, minimum, and mean values of X are maximum for Scenario d; and the maximum, minimum, and mean values of Y are minimum for Scenario c.
- (2)
Dynamic positioning analysis
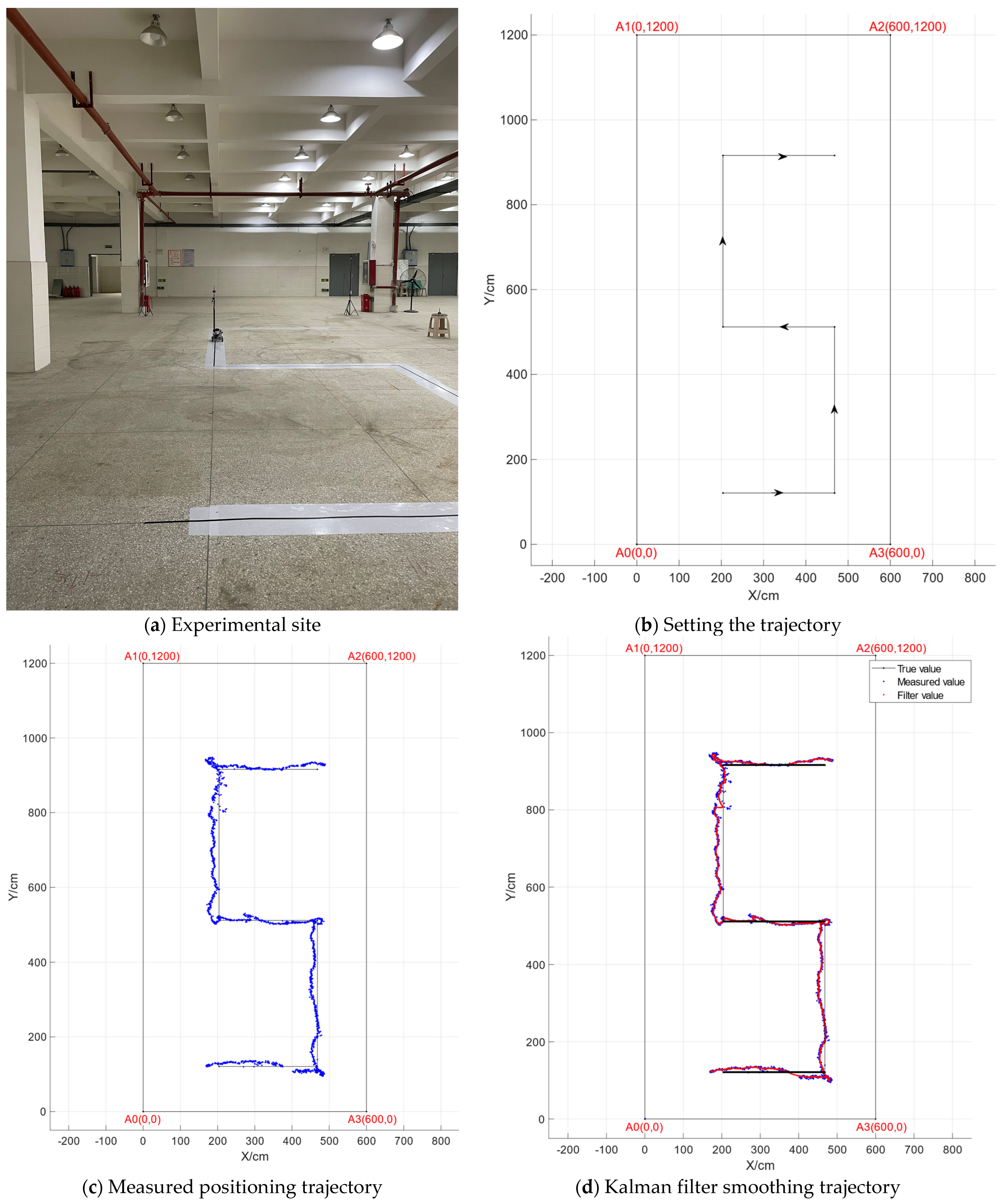
Dynamic experimental site selection was conducted in the 6 m × 12 cm open hall, following a predetermined path. Four UWB modules were used as base stations, fixed at a height of 175 cm. A UWB module was attached to a bracket rod and secured to the machine trolley, positioning it at a fixed distance of 1m from the ground. The trolley was operated remotely using a set path for dynamic positioning tests. The positioning system operated at a frequency of 10 Hz, with NAssistant V1.0 software on the host PC supporting UWB positioning. The machine car is the ROS machine car of WHEELTEC, controlled by Jetson TX1. Positioning data was recorded and saved, as depicted in
Figure 16.
The observation from
Figure 16 reveals that the vertical coordinate offset in UWB following positioning is relatively small, while the horizontal coordinate offset is significant. Moreover, the positioning effect is more favorable when the trajectory moves horizontally rather than vertically. It should be noted that UWB positioning involves discrete points, and employing Kalman filtering can effectively smooth and correct these discrete positioning points.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}