1. Introduction
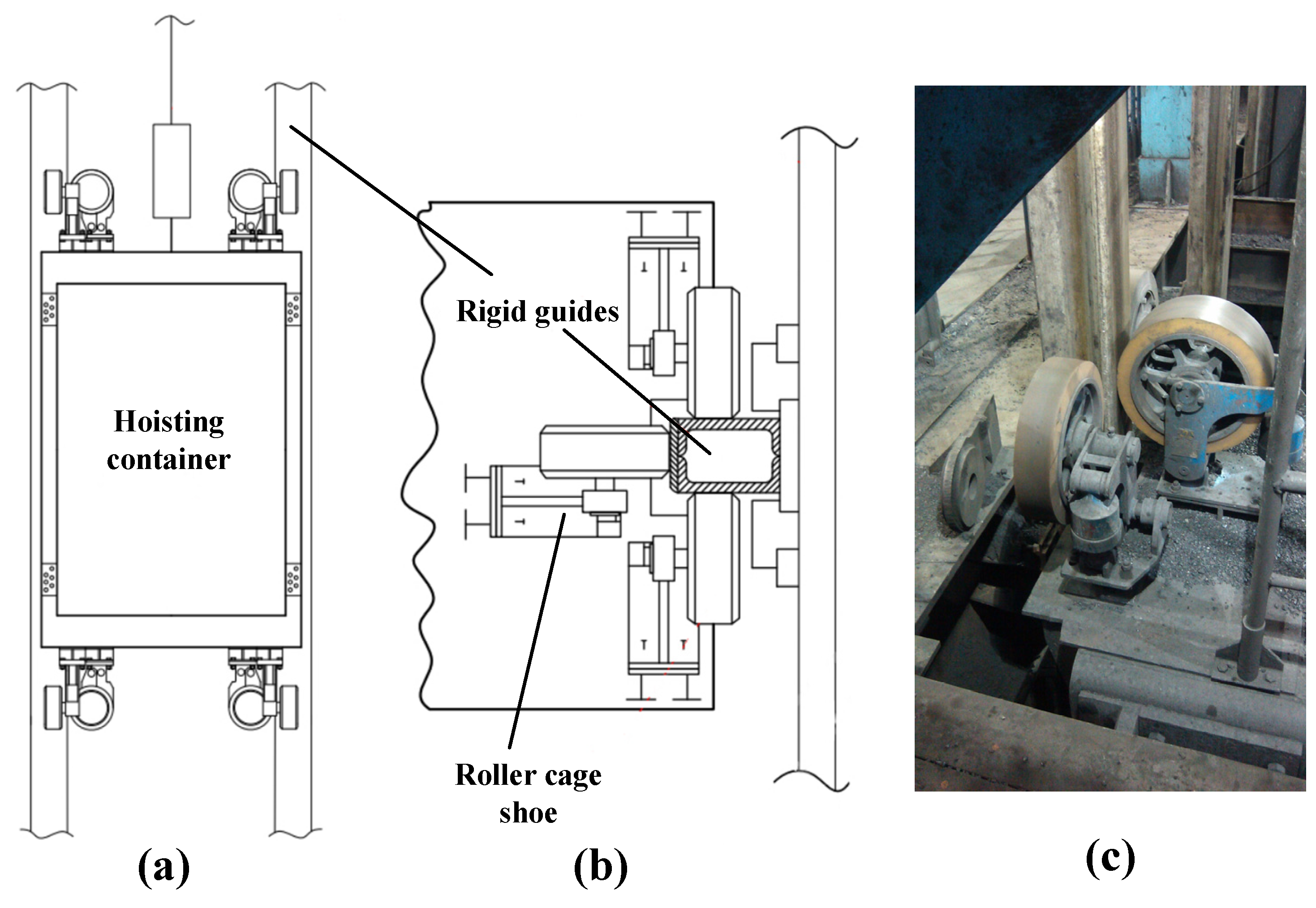
The mine hoisting system, whose safety and stability directly influence both productivity and personnel safety, plays a pivotal role in mine production. As depicted in
Figure 1, the core components of the mine hoisting system include the rigid guide, roller cage shoe, and hoisting container. The roller cage shoe is affixed to the hoisting container and moves vertically along the rigid guide. During the operation of the mine hoisting system, some factors such as the failure of the rigid guide and disturbances from internal and external airflow can lead to adverse working conditions, and thereby intensify complex collisions between the rigid cage shoe and rigid guide, subsequently exacerbating the corresponding deformation damage. Consequently, a new roller cage shoe equipped with features that can absorb the vibration of the hoisting container should be proposed.
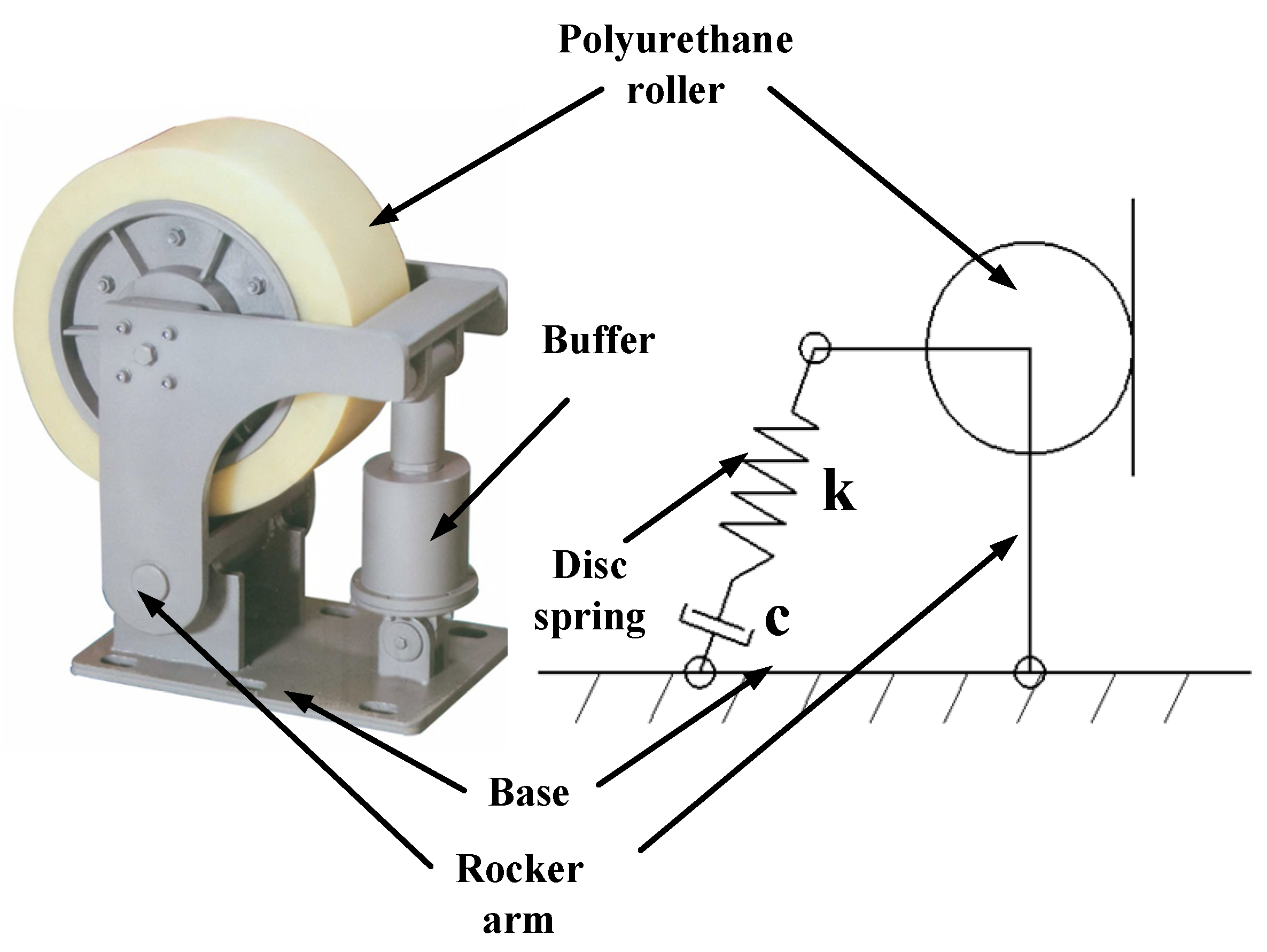
Conventional lifting system vessels are usually equipped with four sets of roller cage shoes which play the roles of guiding and buffering, and each set consists of three pieces. They are distributed and fixed at both the left and right sides and both the upper and lower ends of the container. The traditional elastic roller cage shoe structure, as illustrated in
Figure 2, comprises four main components, including the disc springs, base, rocker arm, and polyurethane roller. The roller is connected to the rocker arm via the drive shaft, which can make the rocker’s arm pivot around the base and simultaneously compress the disc springs. Therefore, horizontal buffering forces will be generated when lateral impacts are imposed on the roller in the lifting process. Due to the existence of the disc springs and its friction damping, the horizontal vibration of the container can be suppressed to a certain extent. However, this type of guide device lacks the function of damping adjustment with which the horizontal vibration of the container can be greatly reduced. The present paper is devoted to designing a new roller cage shoe with a magnetorheological damper to realize a reduction in the horizontal vibration of the mine hoisting container.
In recent years, some researchers have investigated reductions in transverse vibration in mine hoisting systems. Cao et al. [
1] studied the lateral response of a moving hoisting transporter in a cable-guided system. They developed a nonlinear dynamic model and compared it with simulation results. The analyses included vibration responses under different initial conditions, and some suggestions were provided to reduce vibration and improve the system stability. Deng et al. [
2] introduced a semi-active control scheme to address horizontal vibrations in mine hoisting systems by employing a fuzzy skyhook damping strategy in tandem with magnetorheological fluid dampers. In the present mine hoisting system, there is a noticeable emphasis on investigating the vibration characteristics and control of mine hoisting. Ma et al. [
3] based a constant deceleration compensation device on the original brakes, and it was verified through experiments and simulations that the device can realize constant deceleration in a very short time. However, there has been relatively limited exploration of vibration control devices. The majority of conventional roller cage shoes rely on passive vibration-damping methods, such as disc springs and hydraulics [
4]. The present guide device unfortunately exhibits drawbacks such as a slow response, a limited damping capacity, and susceptibility to structural failure. Given the system’s vulnerability to both internal and external disturbances, it is prone to generating substantial vibration impacts. In more severe instances, it can culminate in rope breakage and catastrophic falling accidents.
In the elevator hoisting system, which is similar to the mine hoisting system, the study of transverse vibration and vibration control devices is more in-depth. Zhang et al. [
5] optimized the parameters of a guide shoe to suppress car vibration by studying the relationship between the deformation amount of the guide shoe and the restoring force. Han et al. [
6] studied the mechanical model of the elevator guiding system and obtained the relationship between the load and deformation of the guide shoe. In elevator hoisting systems, the investigation into vibration-damping mechanisms primarily centers on hydraulic floating sky wheels, electromagnetic active guide shoes, hydraulic active guide shoes, servomotor active guide shoes, and magnetic levitation guide shoes [
7].
The roller cage shoe includes an active guide shoe and a passive guide shoe. Passive roller cage shoes primarily rely on a spring damping system to gradually diminish car vibrations. While effective to an extent, they have limitations in swiftly suppressing vibrations and enhancing the comfort of the lift ride [
8]. On the other hand, active roller cage shoes designed for vibration control are intricate, expensive, and demand a continuous supply of external energy. In comparison, semi-active control systems offer damping effects akin to active control but can modify their damping characteristics with minimal energy input, resulting in lower costs and enhanced stability. Among semi-active control devices, MRDs stand out as being highly promising due to their outstanding attributes.
The magnetorheological damper (MRD) utilizes magnetorheological fluid (MRF) to absorb shocks. By adjusting the current in the excitation coil, different magnetic field forces are achieved. This causes the fluid’s rheological properties to change, generating resistance to movement and effectively damping vibrations [
9]. As a highly effective semi-active damper, it can be extensively used in transportation, structural seismic applications, and other fields. Bang-Hyun Jo et al. [
10] explored the feasibility of employing magnetorheological group dampers in an airplane landing-gear system to diminish unintended shocks and vibrations during the landing and taxiing phases. Kawase et al. [
11] conducted an experimental validation of the seismic performance of an elevator equipped with MRF dampers during an earthquake. This system’s effectiveness was verified through numerical simulations in elevator applications. The MRD principle is also widely utilized for vibration damping in elevator hoisting systems. Li et al. [
12] developed an elevator MRD based on a permanent magnetic field, investigating factors like the magnetic field strength, distribution, descent speed, deceleration time, and distance. The results demonstrated that the eddy currents induced by the permanent magnetic field effectively achieved elevator deceleration. Zhang et al. [
13] introduced a variable-domain fuzzy control method for semi-active roller cage shoes equipped with magnetorheological dampers; the elevator experiments conclusively demonstrated that this controller proficiently mitigates horizontal vibrations. In summary, the controller proves highly effective in suppressing horizontal vibrations, markedly enhancing the ride experience in high-speed elevators. Santo et al. [
14] and colleagues investigated the horizontal response of vertical transportation systems with nonlinearities under guideway deformation excitation. They put forward a strategy for controlling the dynamic horizontal behavior of a three-degree-of-freedom model using a controllable MRD, which demonstrated an effective reduction in vertical transport vibrations. In the mine hoisting system, Wu et al. [
15] introduced a novel type of MRD vibrating screen damper; experimental evaluations demonstrated a superior vibration-damping performance. Additionally, Yao et al. [
16] proposed a tension equalizer based on MRDs, and its potential for vibration reduction was confirmed through numerical simulations.
The literature above highlights a predominant focus on analyzing the vibration characteristics and control strategies in mine hoisting. However, it is evident that there is a lack of reliable vibration-damping devices and proven-effective methods for vibration reduction in mine hoisting systems. The field still largely adheres to traditional design theories. Effectively mitigating vibration in mine hoisting systems remains a critical concern for ensuring both mine production safety and efficiency.
This paper drew from the use of the MRF rheological principle of vibration damping in the mine hoisting system and designed a new type of roller cage shoe by applying the excellent characteristics of MRF dampers. MRDs and disc springs were used as the buffers of the roller cage shoe for vibration reduction, and the performance of vibration reduction was optimized and verified through simulations. This study can provide new ideas for the stability design of ultra-deep mine hoisting systems. This new roller cage shoe offers advantages such as low power consumption, a compact size, a controllable damping force, a rapid response (in milliseconds), a simple structure, excellent temperature stability, and resilience to impurities.
The main structure of the content of the present paper is (1)
Section 2: the structural design of the cushioning cage shoe based on MRDs; (2)
Section 3: the influence of structural parameters on the performance of the damper; (3)
Section 4: the simulation and analysis of the virtual prototype of the cage shoe cushion; and (4)
Section 5: the conclusion.
5. Conclusions with Discussion of Future Work
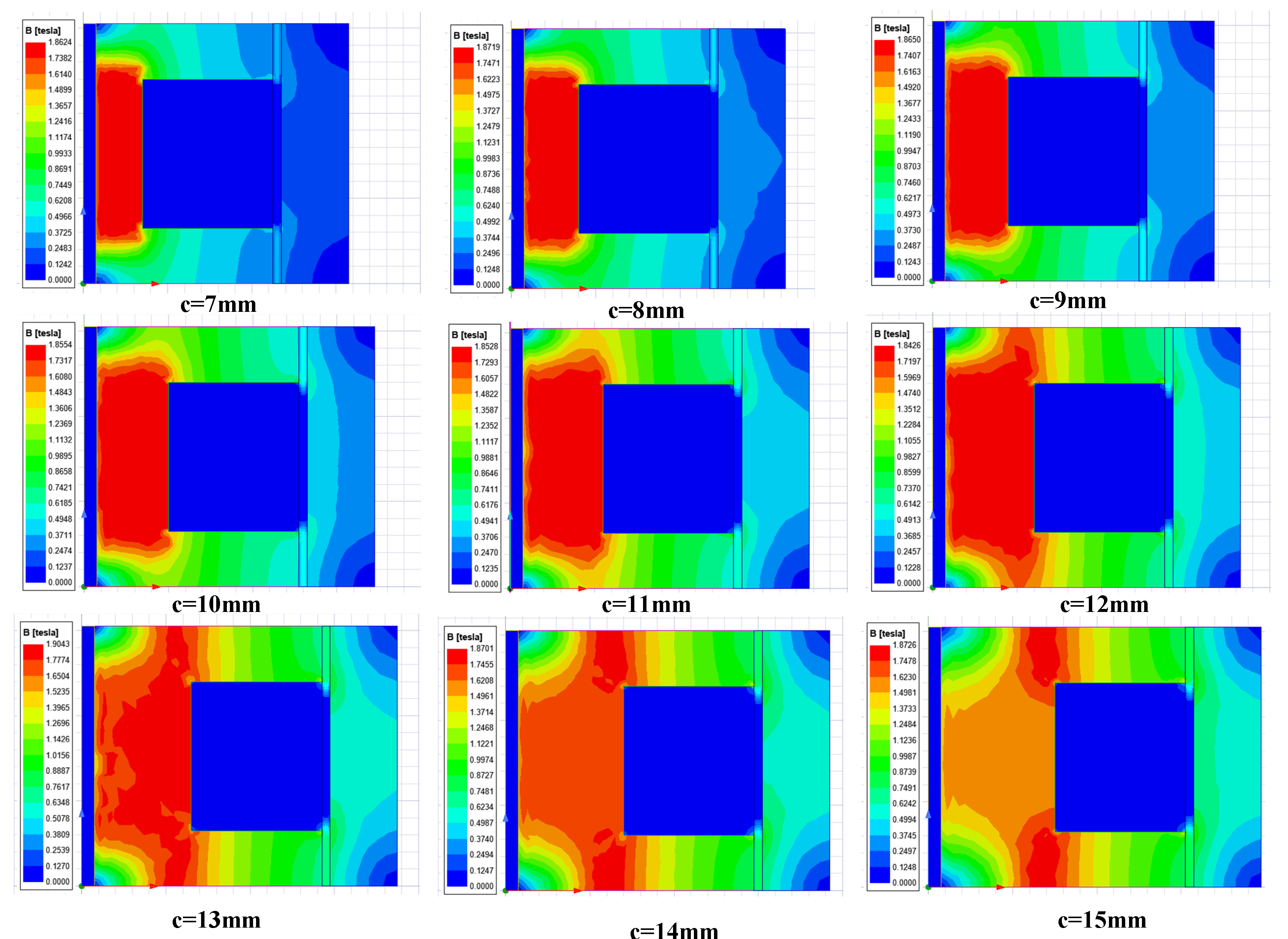
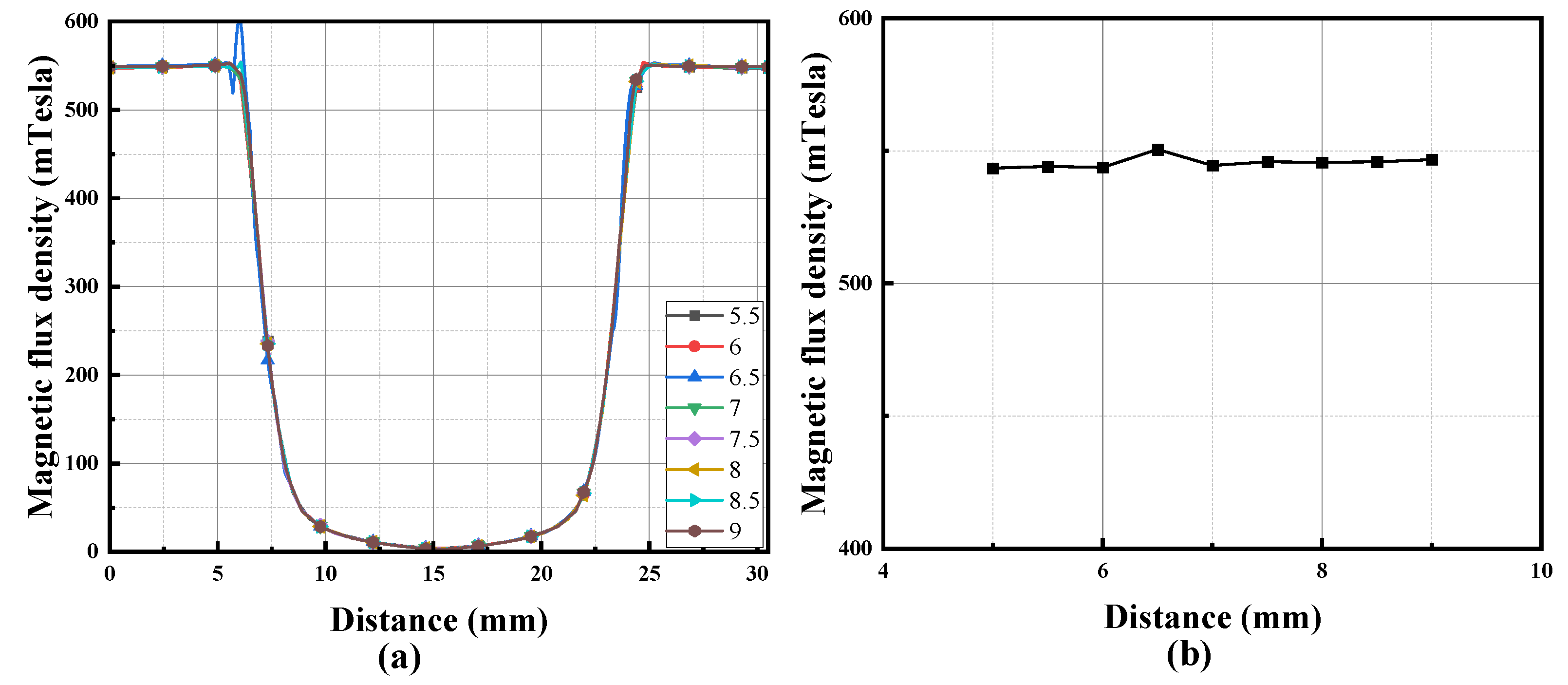
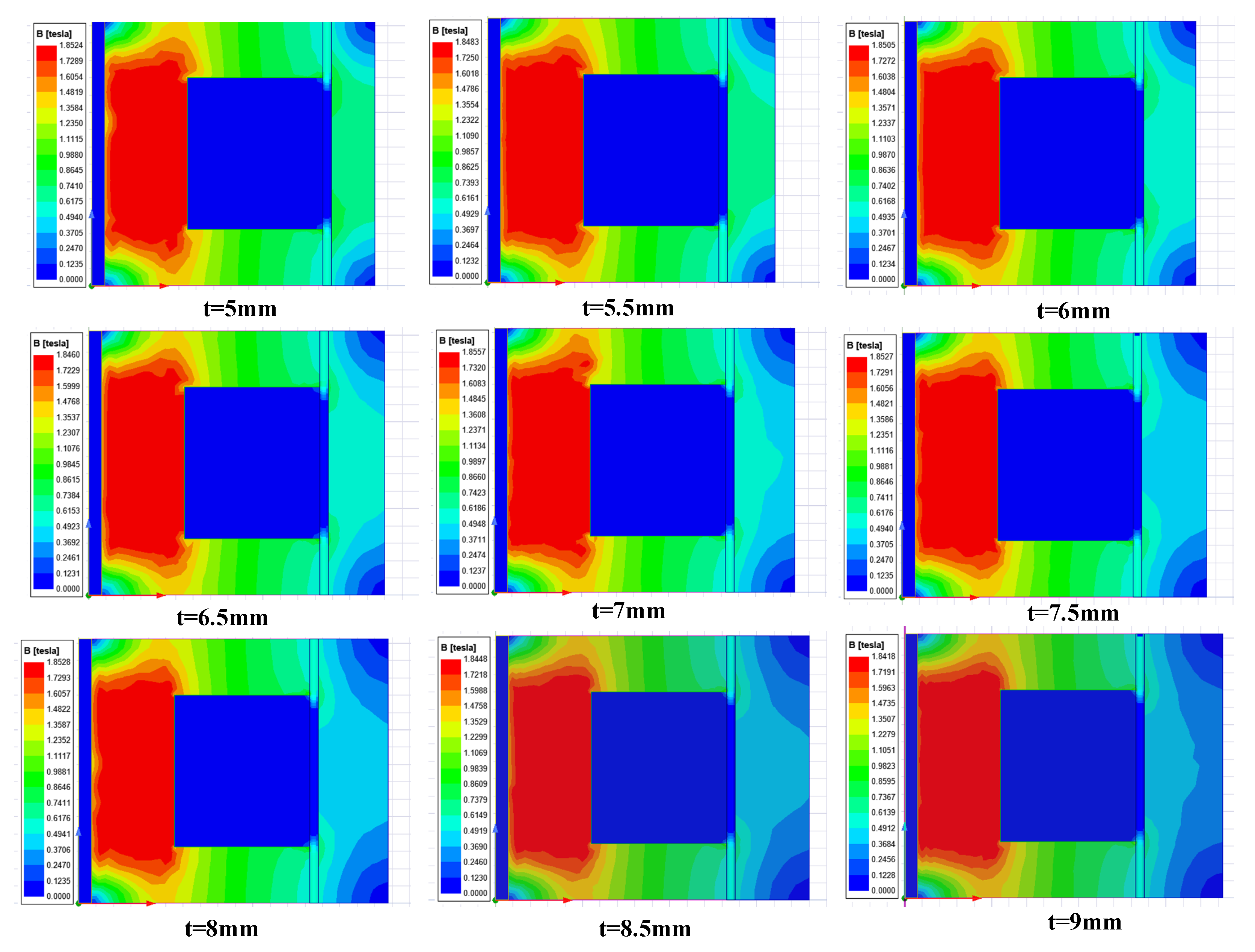
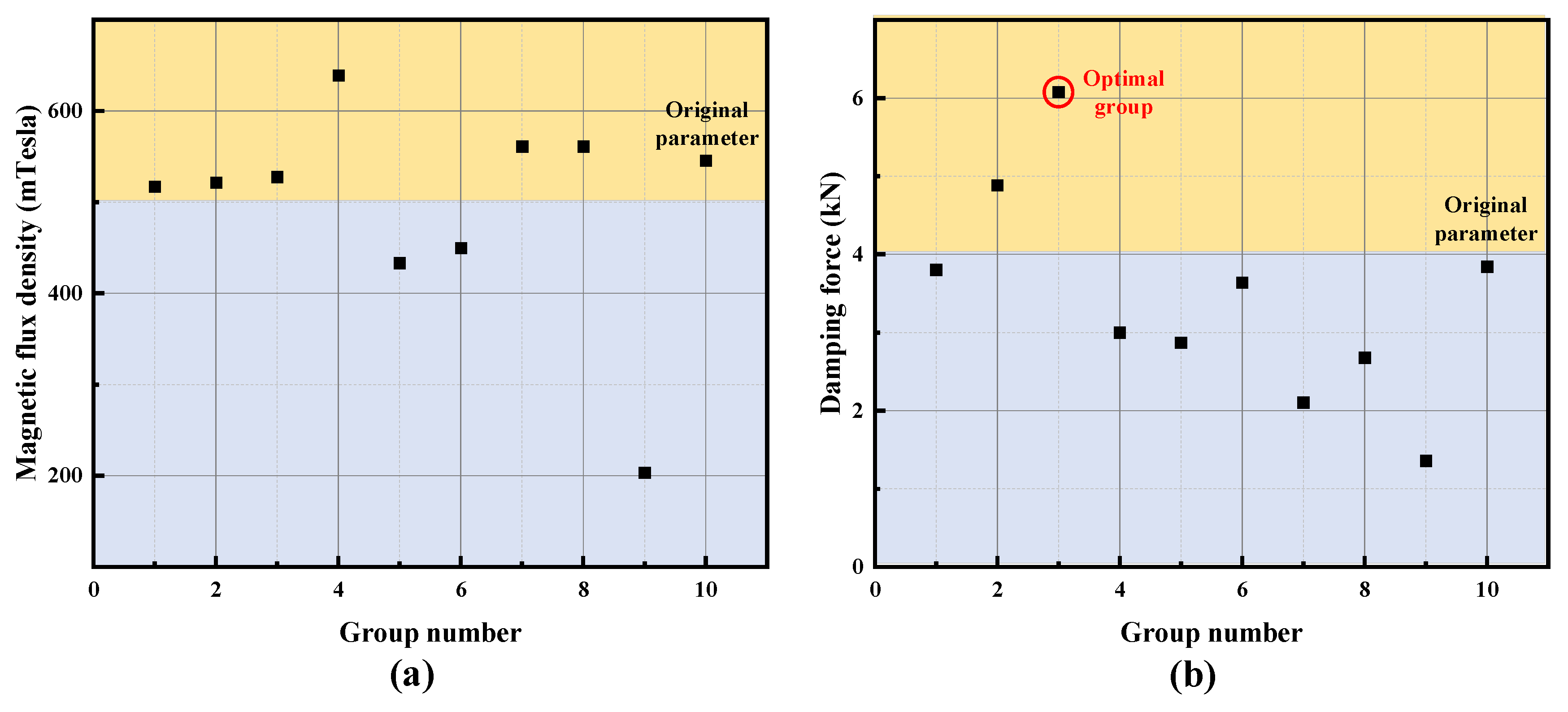
In this paper, a roller cage shoe device based on MRDs in series with a disc spring for buffering was designed. It aims to improve the operational efficiency and safety of mine hoisting system vibration-damping equipment. The structural design and magnetic circuit design of this roller cage shoe buffer were first carried out. A finite element model of the magnetic circuit was established to investigate the impact of key structural parameters on the magnetic induction intensity within the damping channel. The findings indicate that the magnetic induction intensity within the damping channel decreases as the width of the channel increases. It increases with a wider piston rod wing radius and a larger magnetic core radius. The thickness of the piston shell, however, exerts a relatively minor influence on the magnetic induction intensity. The combination of structural parameters of the magnetic circuit was optimized using the method of orthogonal tests, and the optimized MRD improved the output damping force by 58% compared with the pre-optimized one. A virtual prototype model of the MRD-based roller cage shoe buffer was created to validate the effectiveness of the optimized buffer. The simulation results demonstrate that the optimized buffer exhibits commendable damping performance and a rational design.
The conception and design of this device furnish a crucial theoretical foundation for the investigation of roller cage shoes in mine hoisting systems. Additionally, it presents a fresh design approach for optimizing lug structures. Magnetorheological dampers also have great potential in mine hoisting vibration suppression due to their advantages of fast response speeds and adjustable damping forces, which can be further explored as a semi-active control strategy based on the new type of roller cage shoe proposed in this paper, which holds substantial academic importance and practical utility in guaranteeing the secure operation of the mine hoisting system.
In the future, the on-site verification of the simulation system as well as the optimal design will be conducted to improve the reliability of the design. This is needed because this system is critical for the safety of the hoisting container. Another future work will be conducted on understanding the fault tolerance, robustness, and resilience of the system. It is noted that these concepts are relatively new, and interested readers are directed to references [
22,
23].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}