
An Experimental Study on the Vibration Transmission Characteristics of Wrist Exposure to Hand Transmitted Vibration


Abstract
:1. Introduction
2. Methods
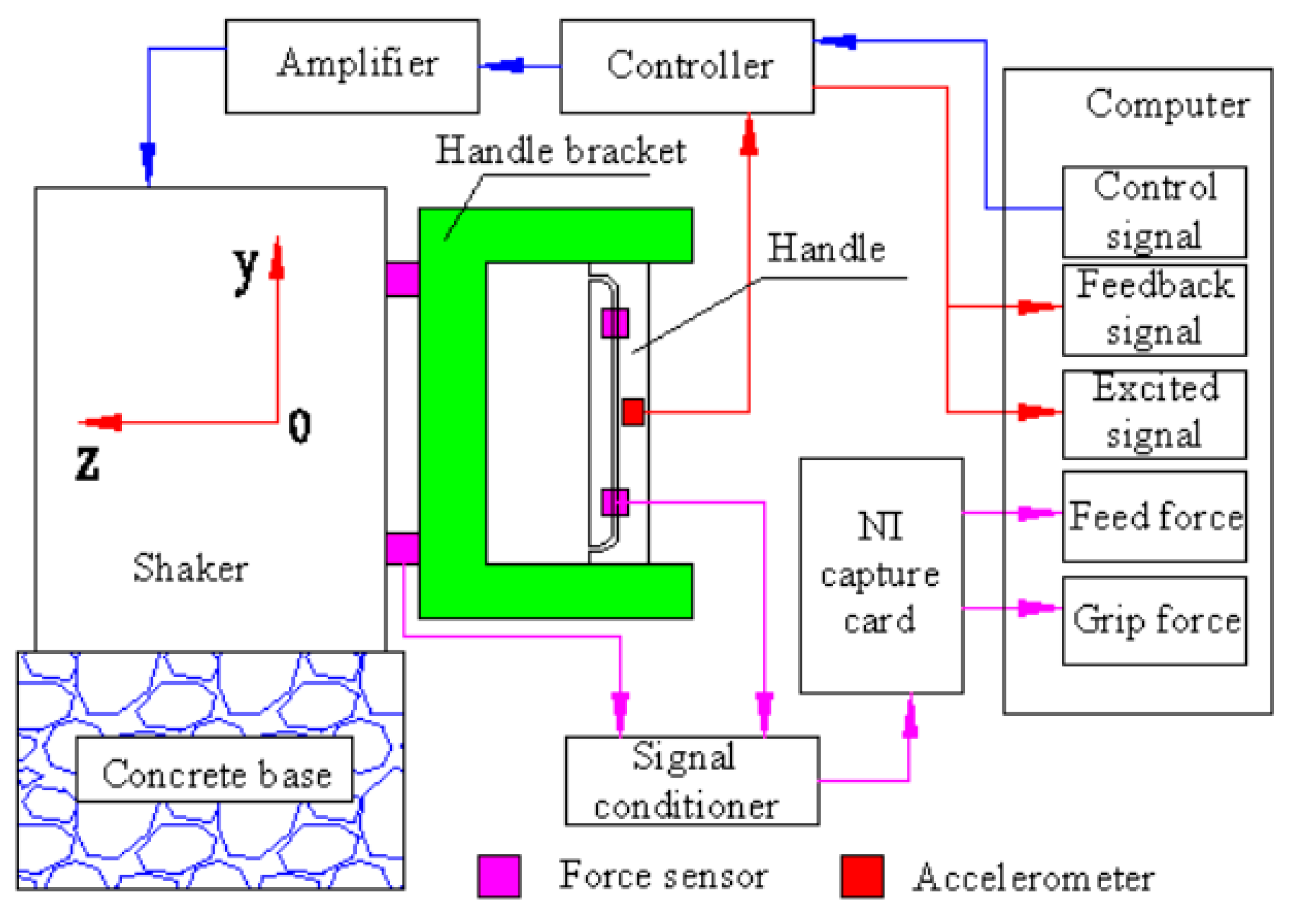
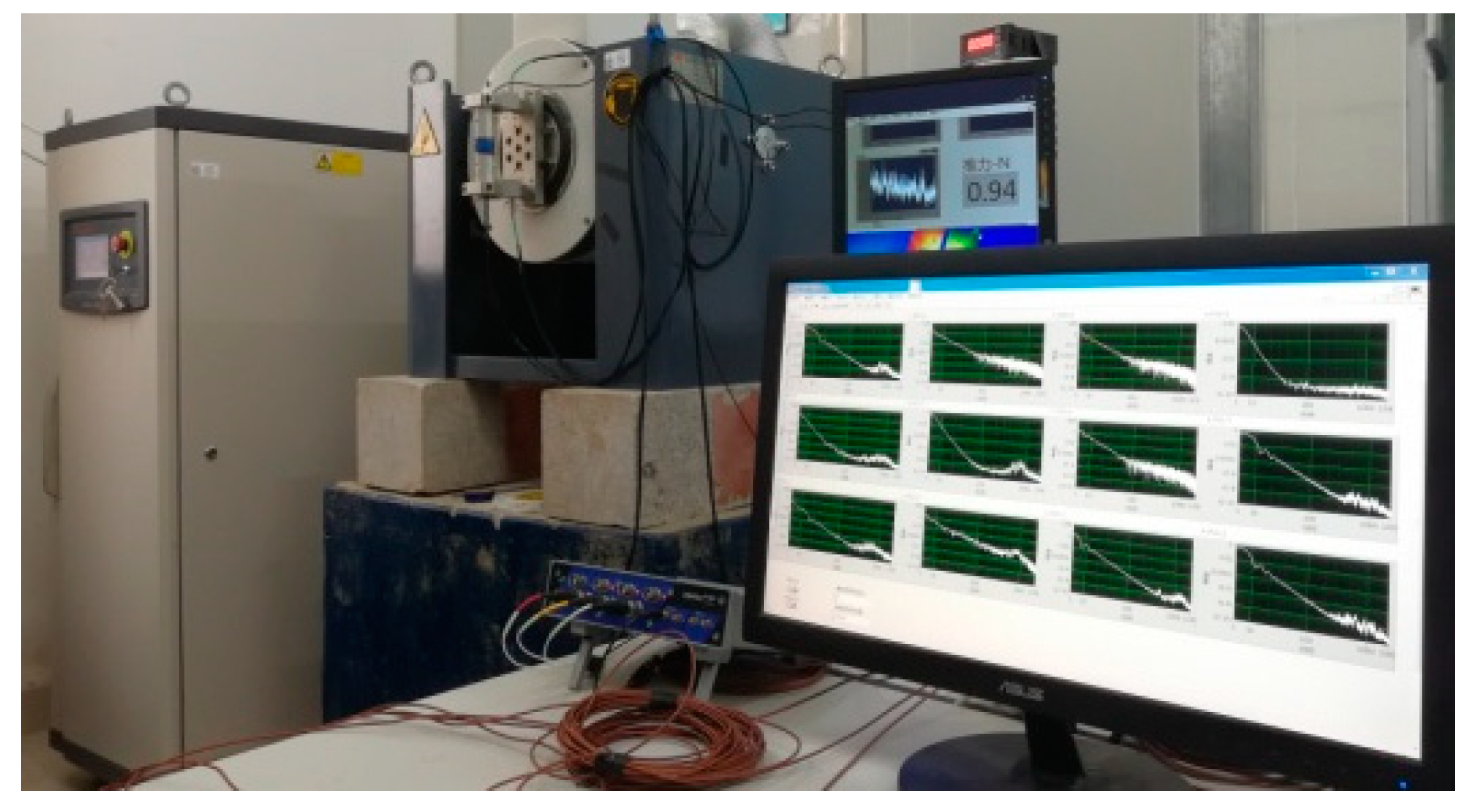
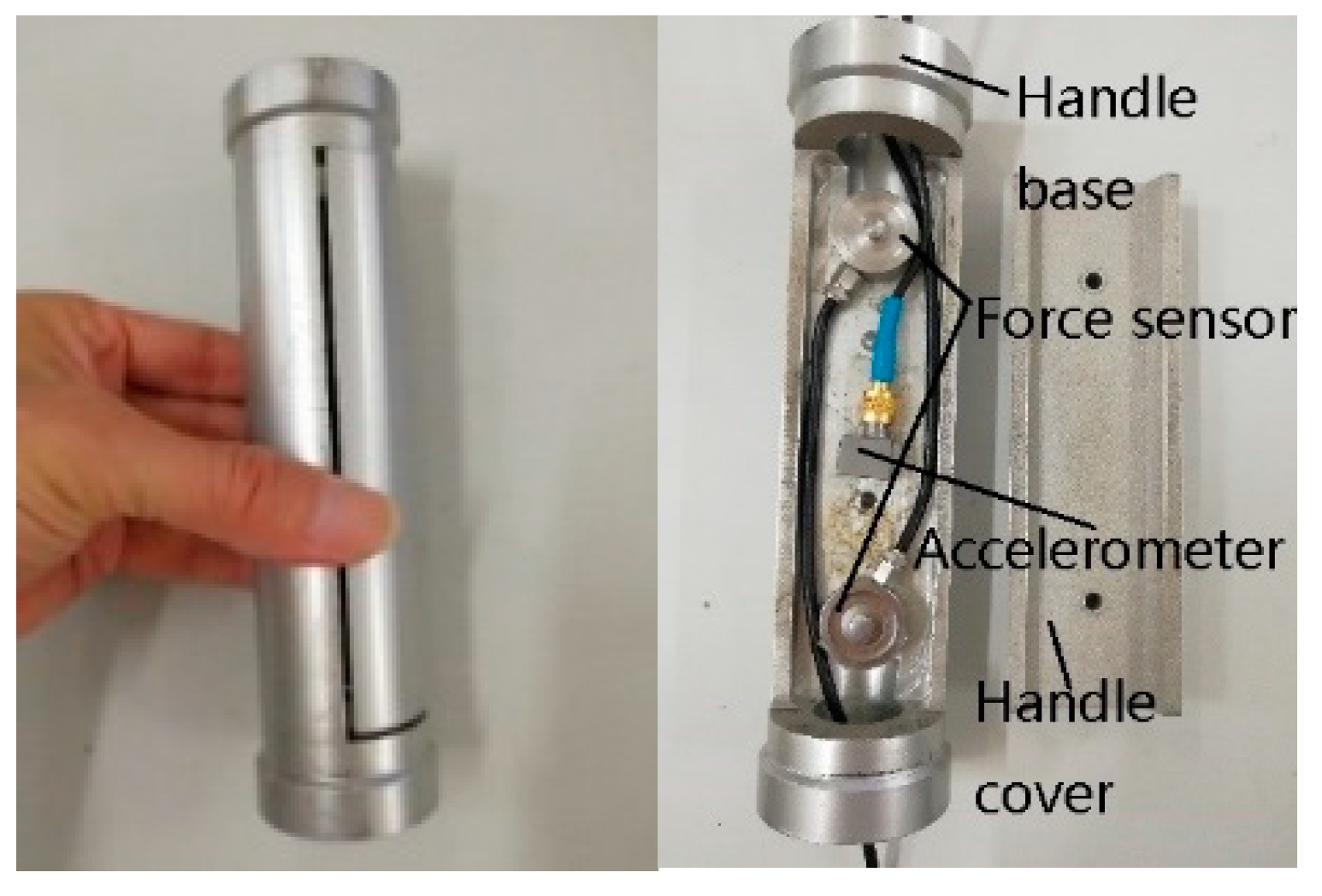
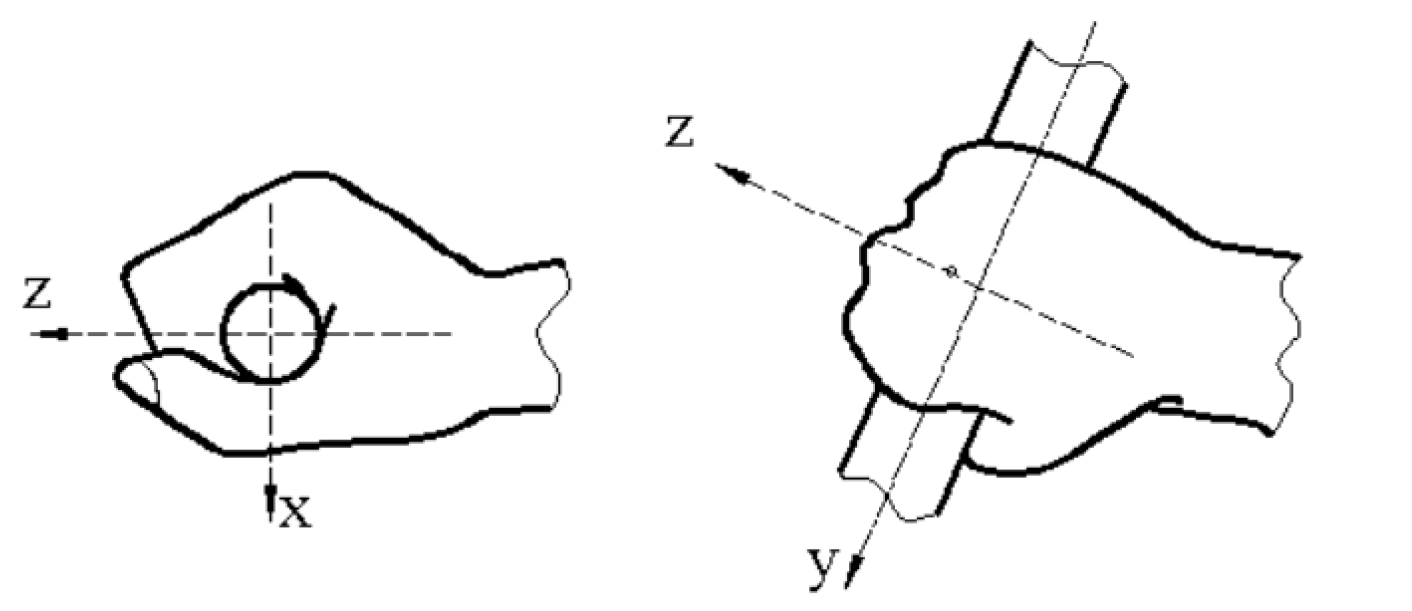
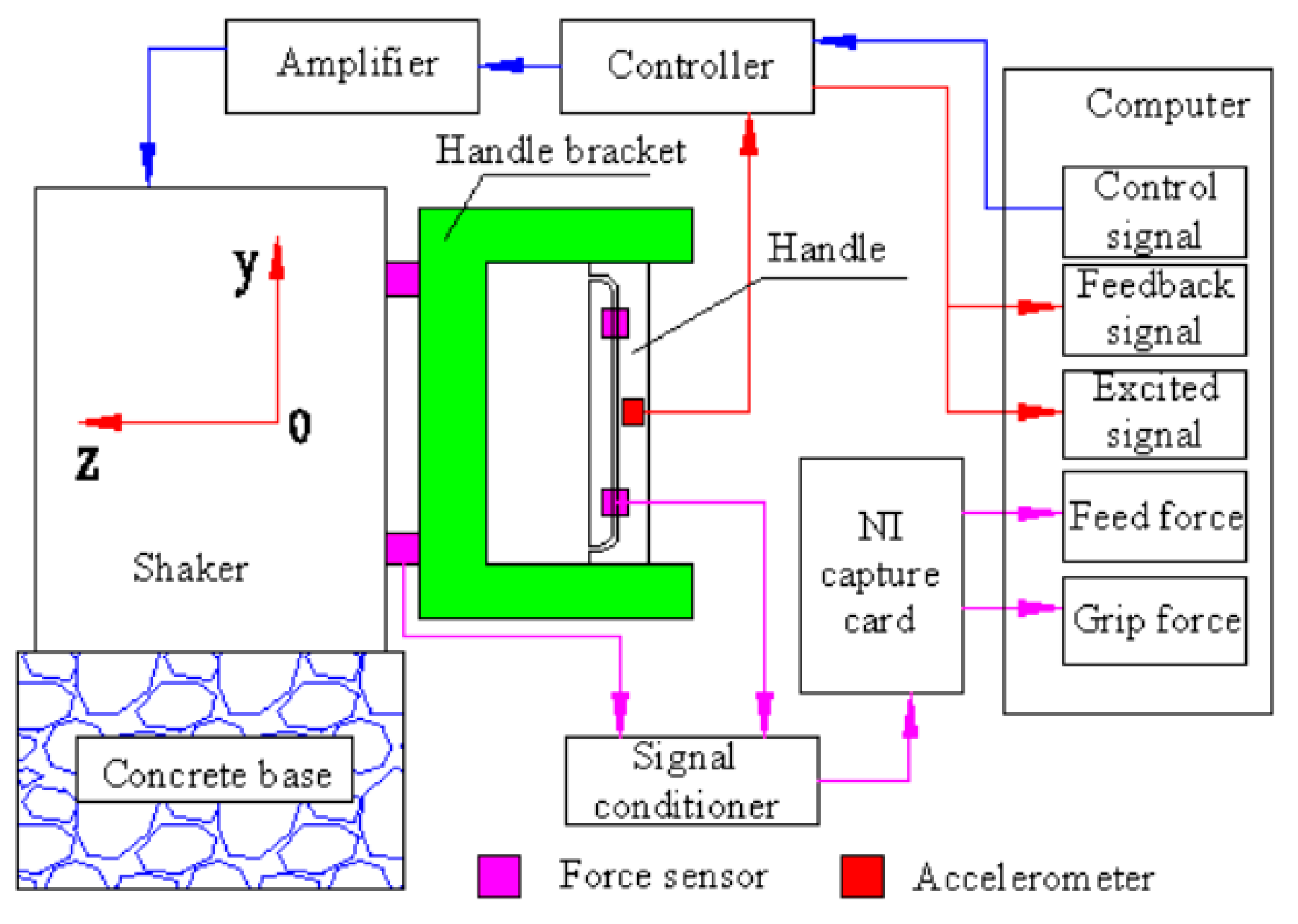
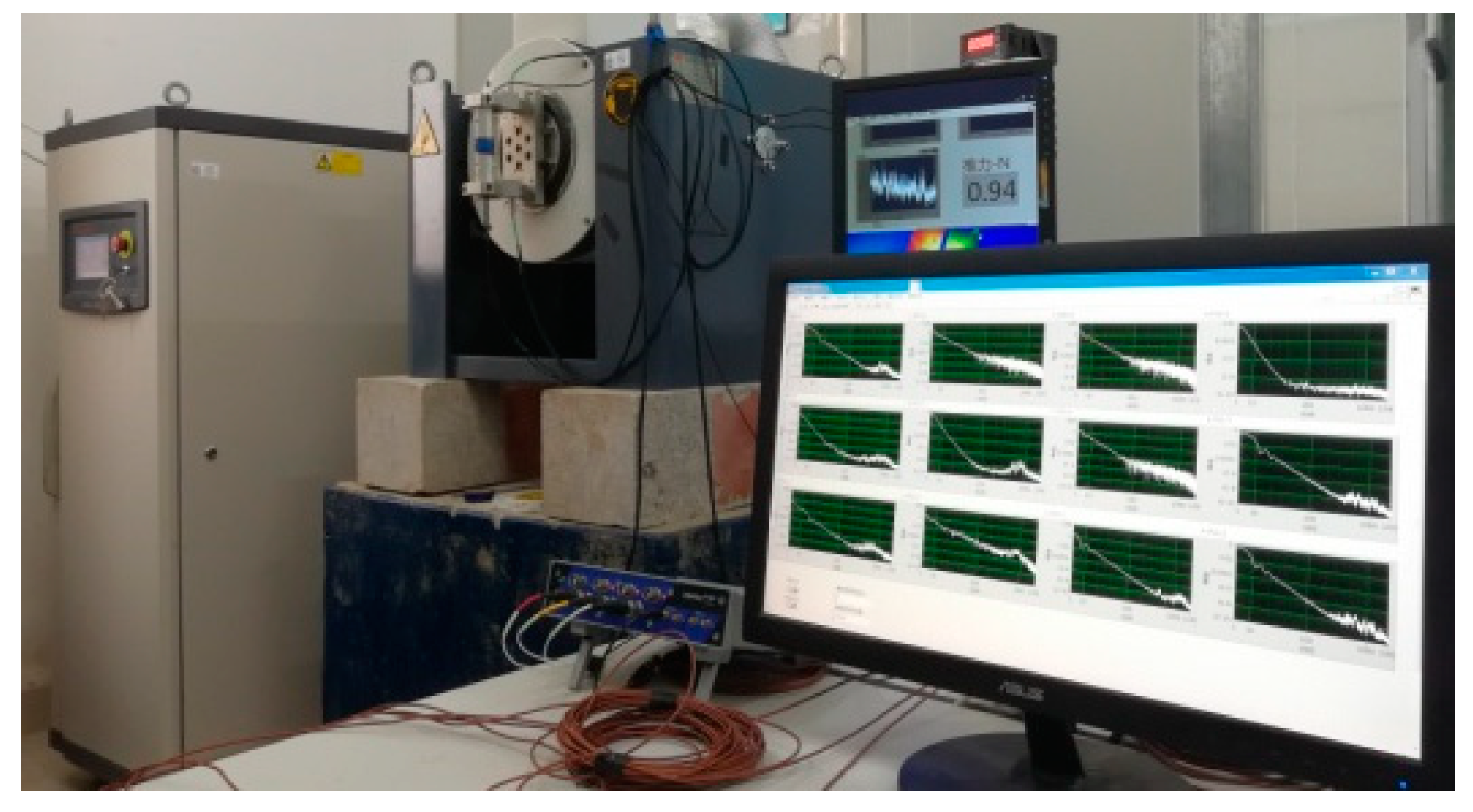
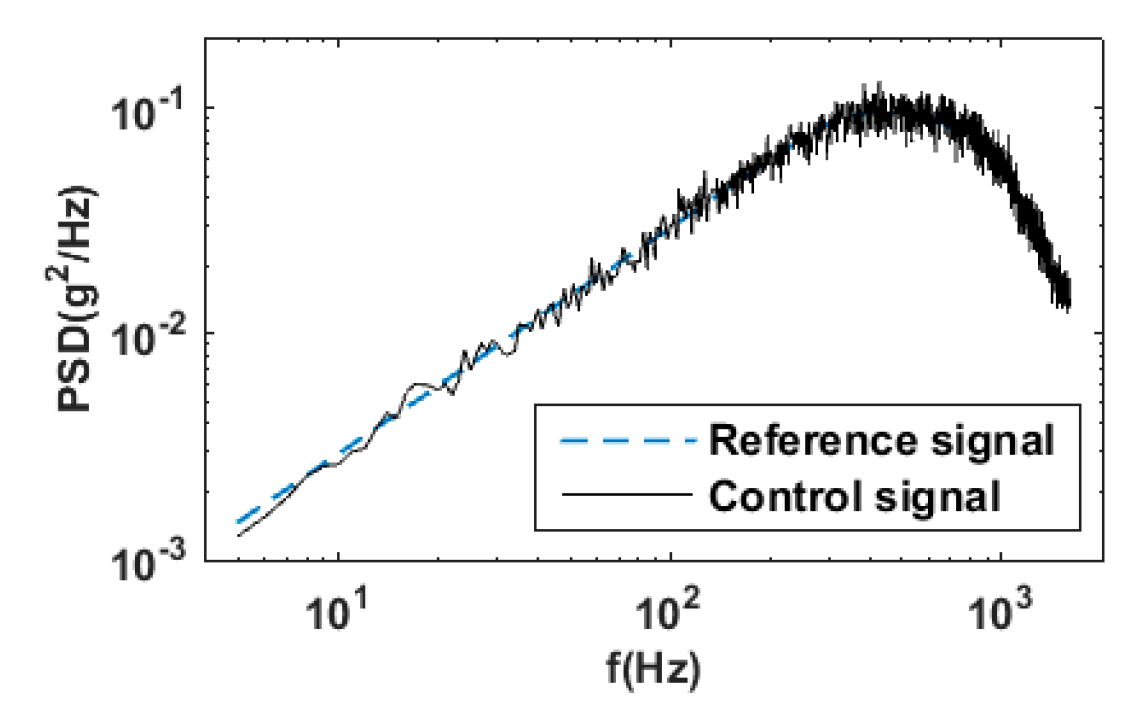
2.1. Experimental Set-Up
2.2. Subjects and Measurement Steps
2.3. Vibration Transmissibility
3. Results and Discussion
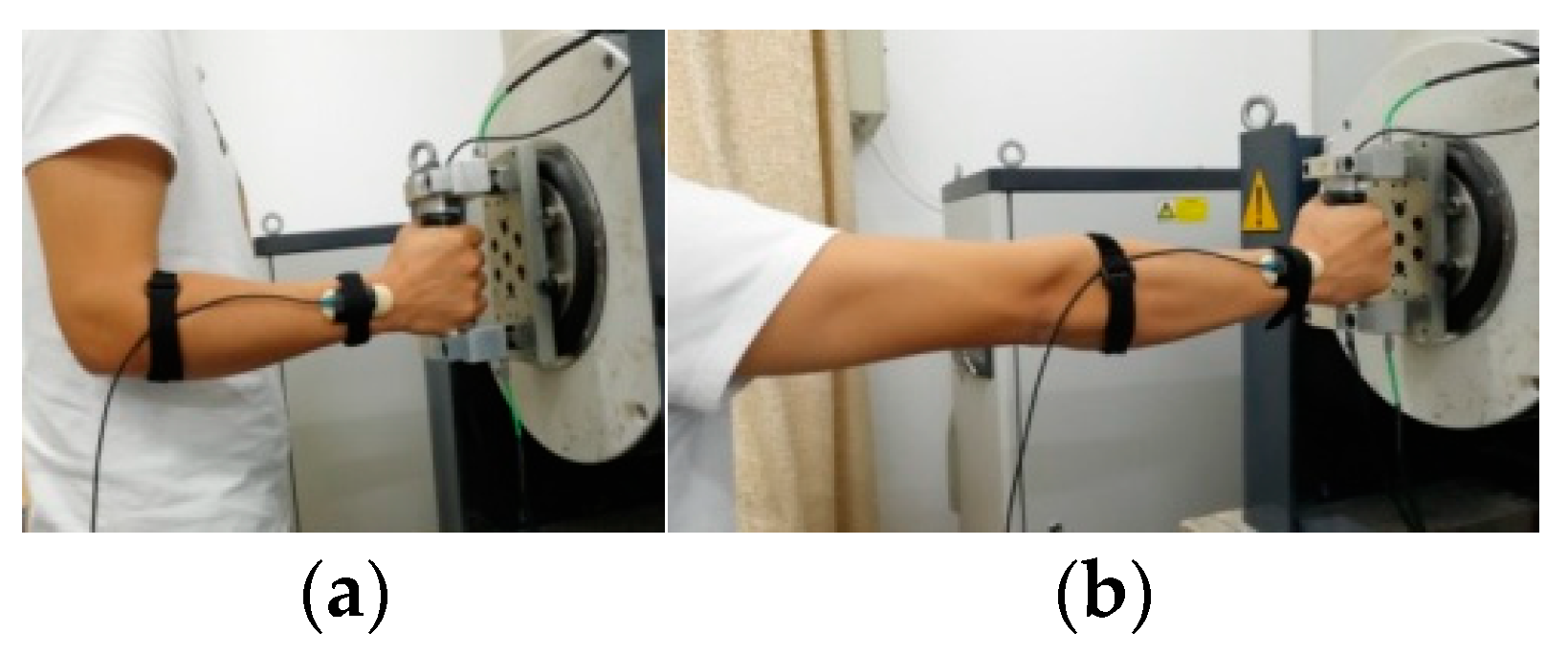
3.1. Effect of Arm Posture
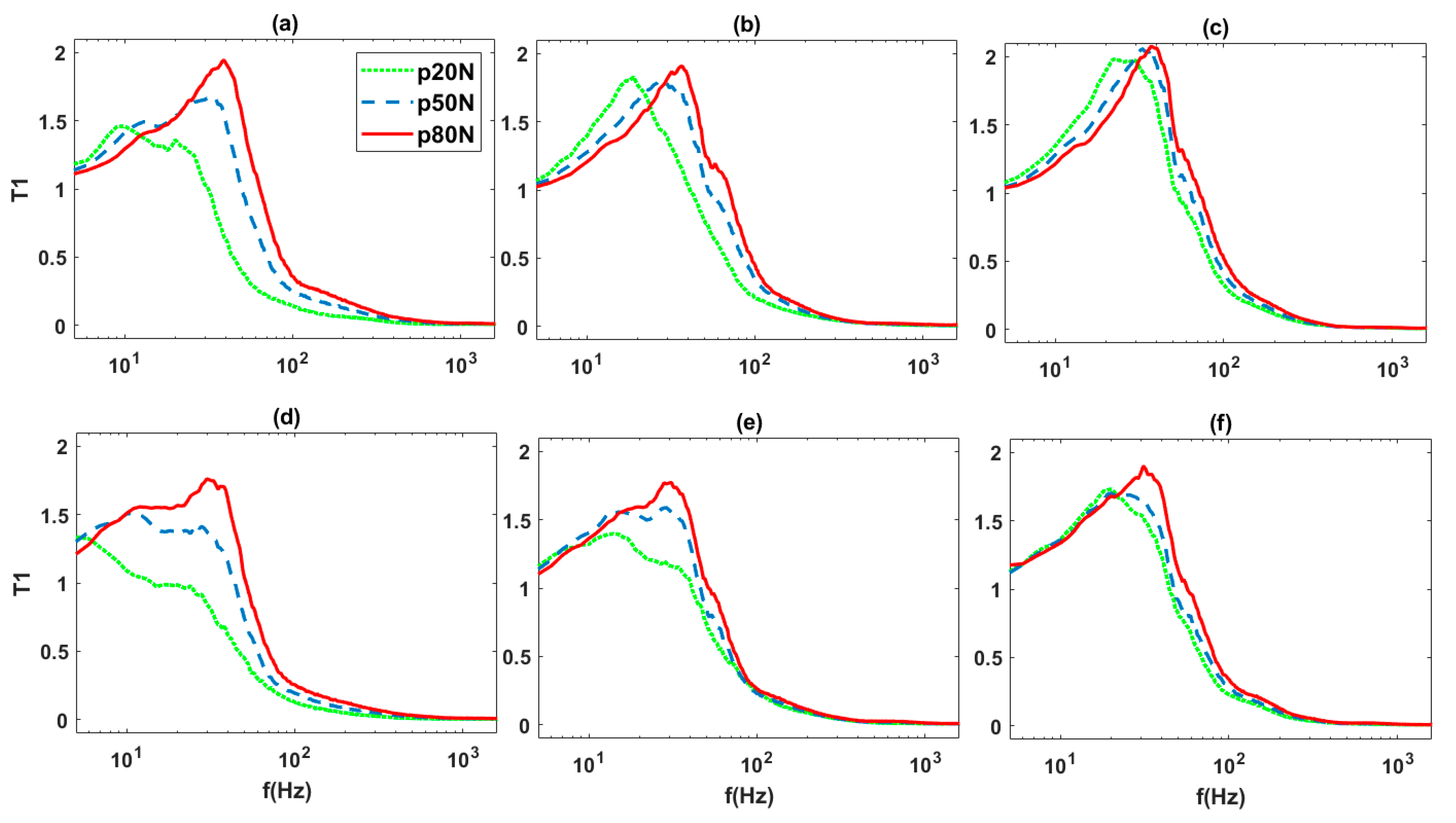
3.2. Effect of Thrust Force
3.3. Effect of Grip Force
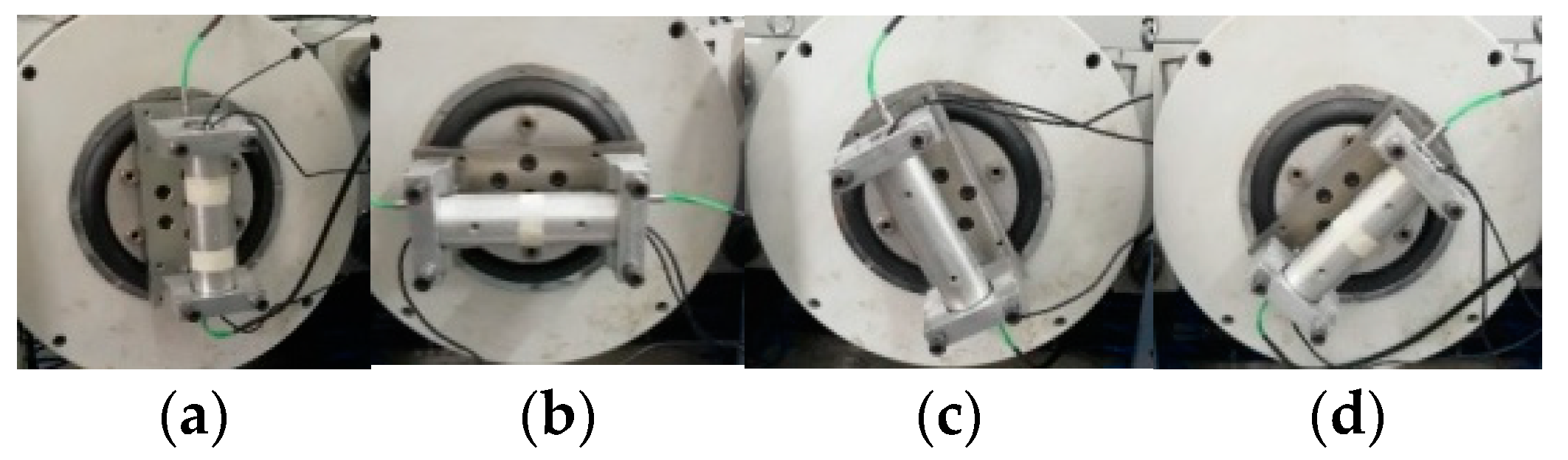
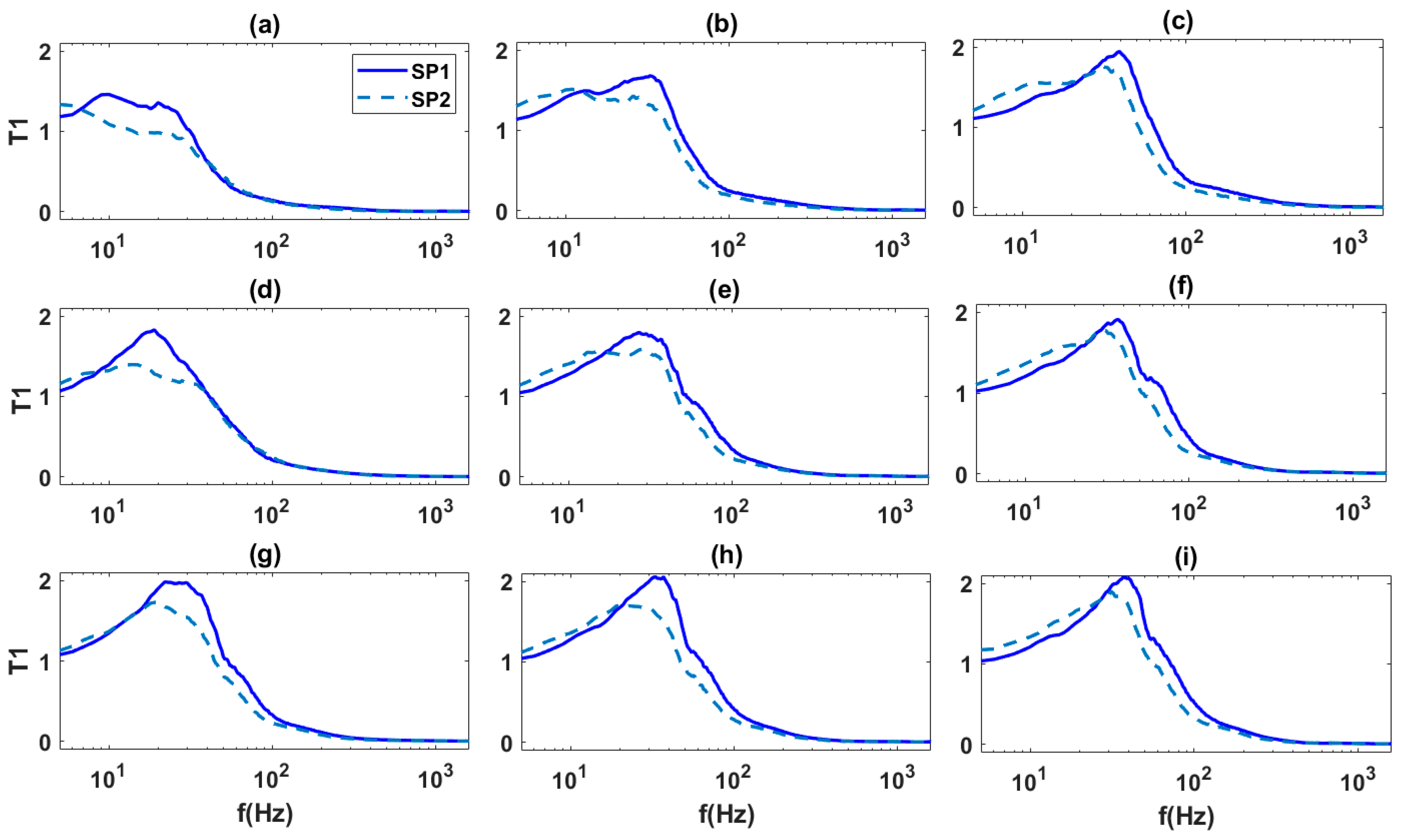
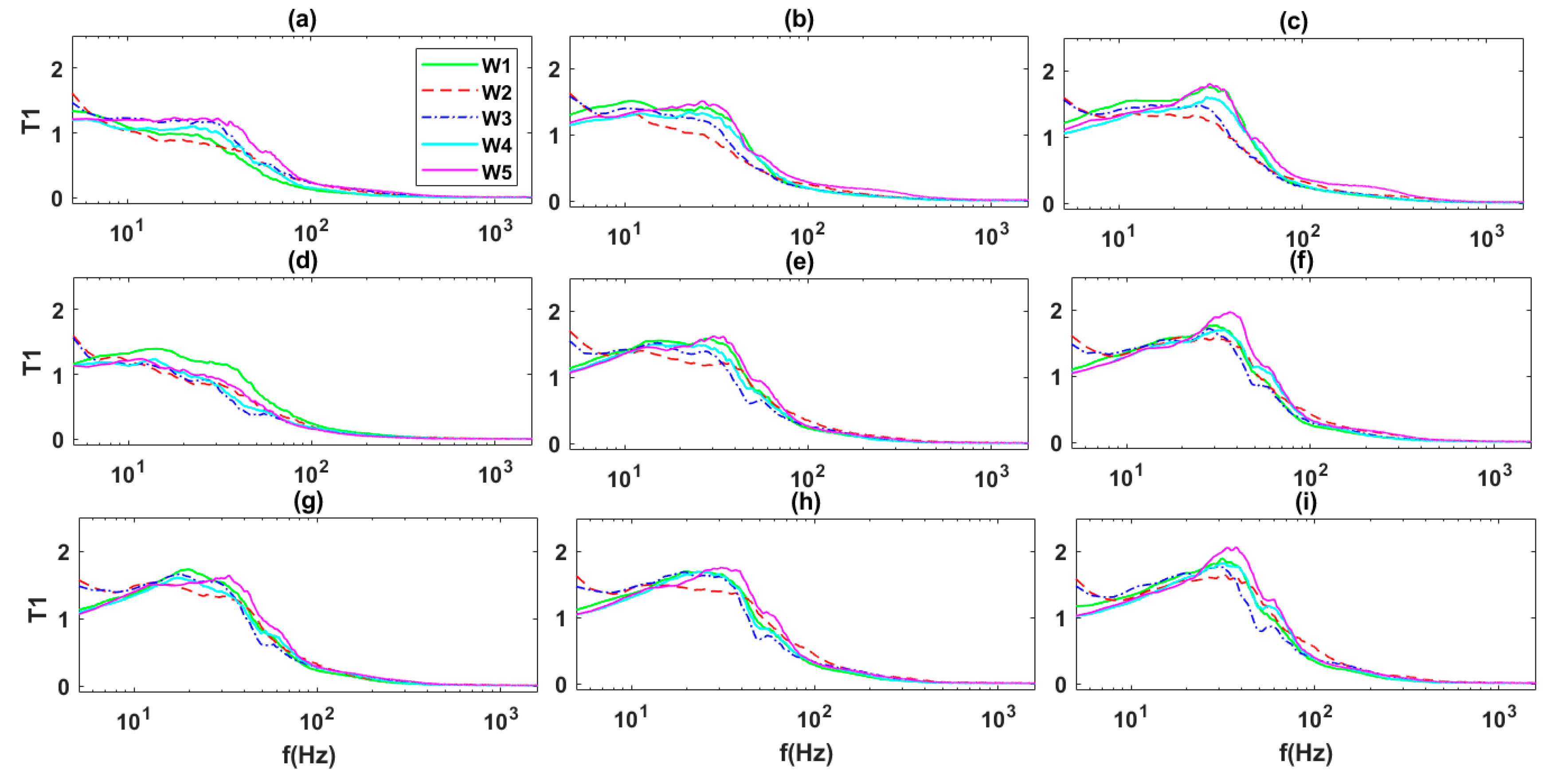
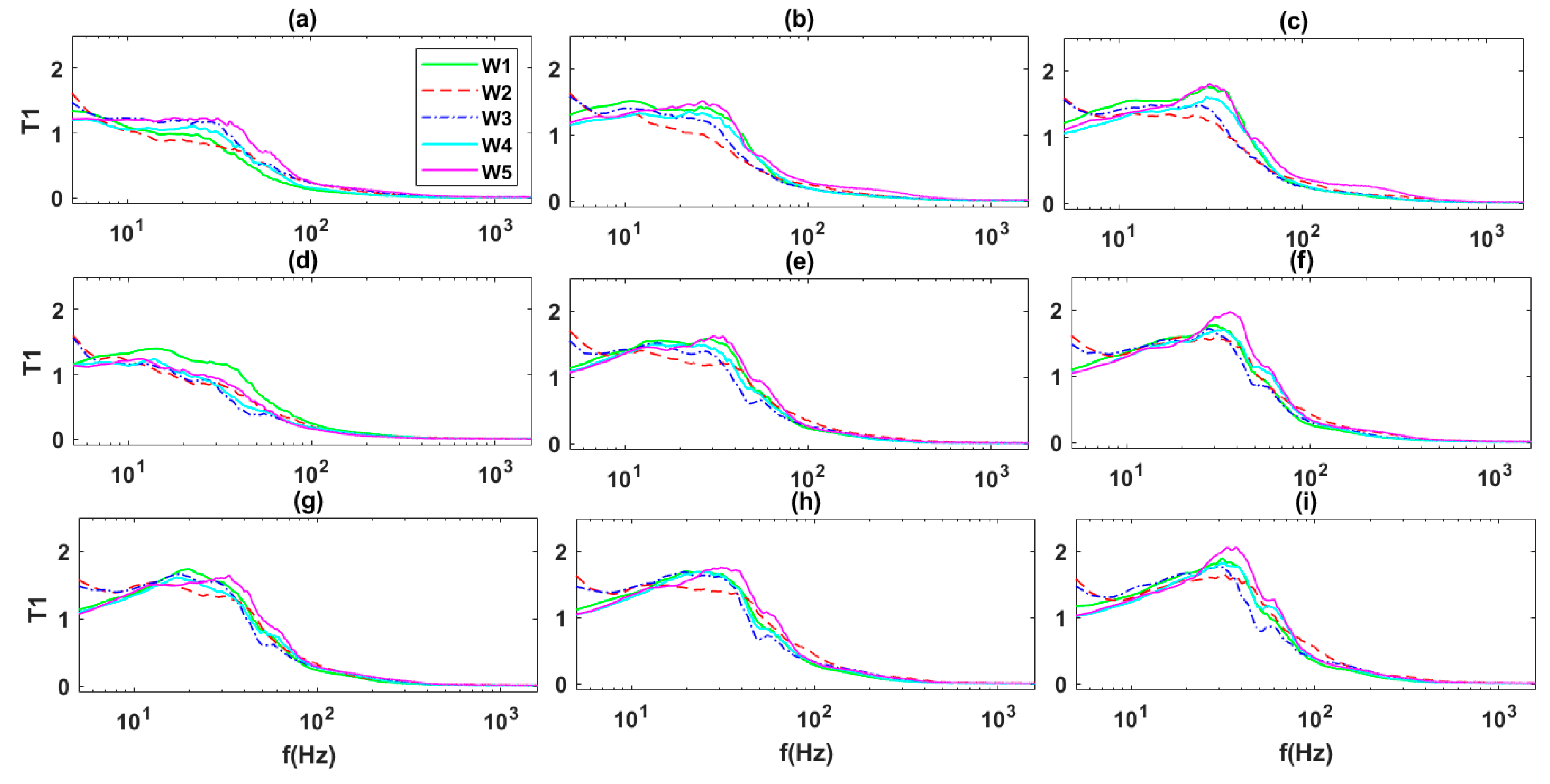
3.4. Effect of Wrist Posture
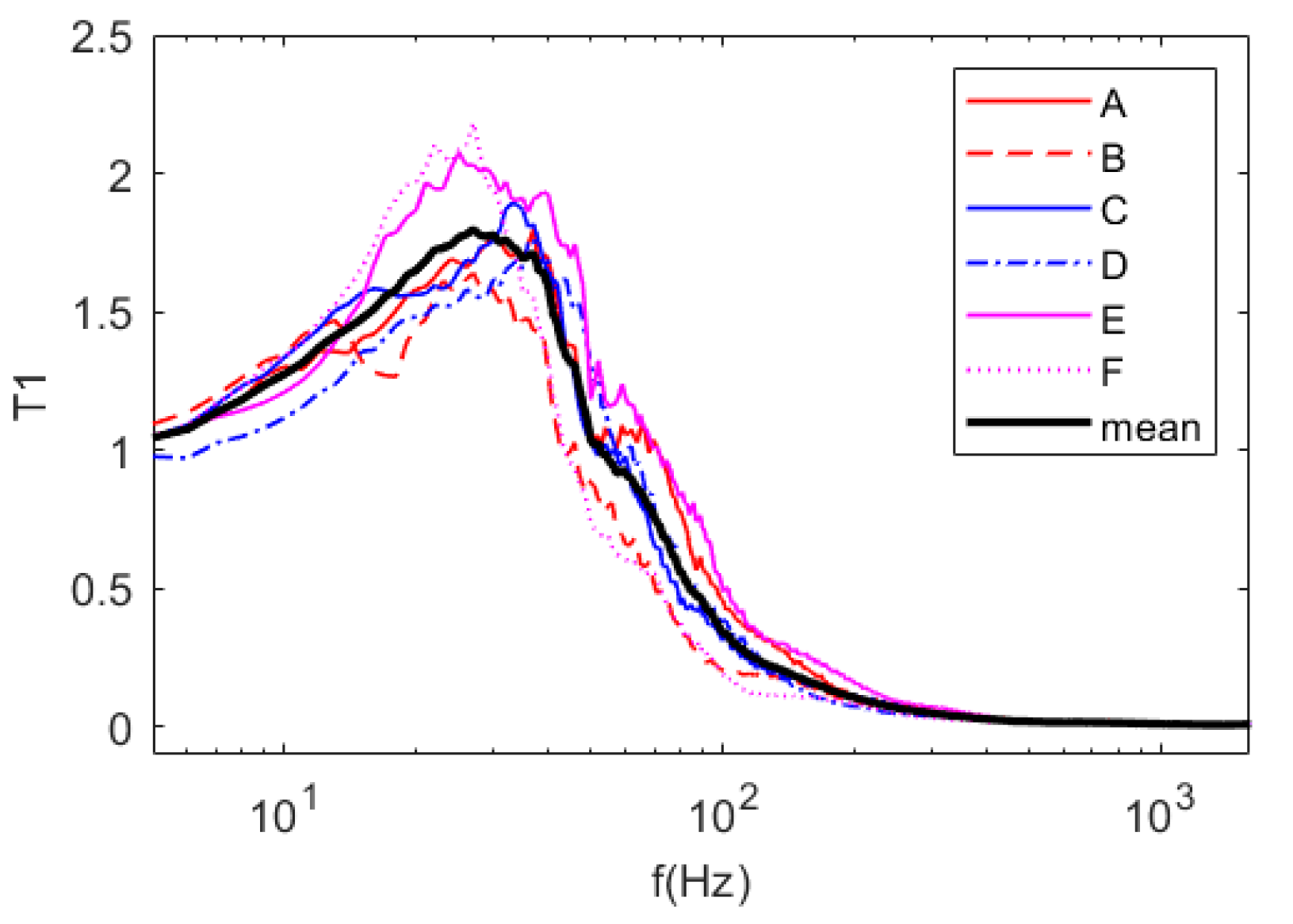
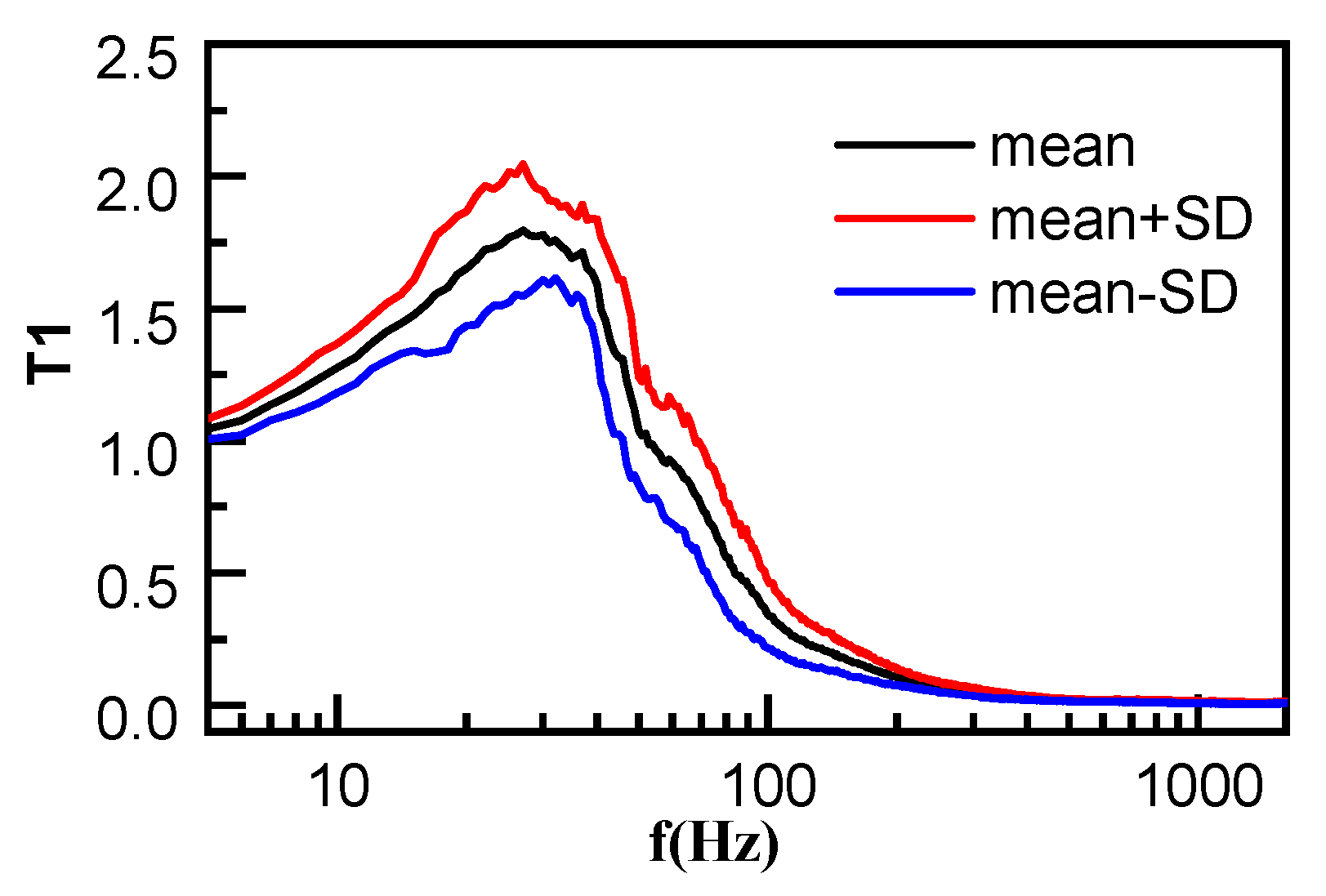
3.5. The Subject Variability
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Heaver, C.; Goonetilleke, K.S.; Ferguson, H.; Shiralkar, S. Hand-arm vibration syndrome: A common occupational hazard in industrialized countries. J. Hand Surg. Eur. Vol. 2011, 36, 354–363. [Google Scholar] [CrossRef] [PubMed]
- Mbutshu, L.H.; Malonga, K.F.; Ngatu, N.R.; Kanbara, S.; Longo-Mbenza, B.; Suganuma, N. Incidence and Predictors of Hand–Arm Musculoskeletal Complaints among Vibration-exposed African Cassava and Corn Millers. Saf. Health Work 2014, 5, 131–135. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pelmear, P.L.; Wasserman, D.E. Hand-Arm Vibration, 2nd ed.; OEM Press: Beverly Farms, MA, USA, 1998; pp. 1–272. [Google Scholar]
- Stromberg, T.; Dahlin, L.B.; Brun, A.; Lundborg, G. Structural nerve changes at wrist level in workers exposed to vibration. Occup. Environ. Med. 1997, 54, 307–311. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Handford, M.; Lepine, K.; Boccia, K.; Ruddick, F.; Alyeksyeyeva, D.; Thompson, A.; Switzer-McIntyre, S. Hand-arm vibration syndrome: Workers’ experience with functional impairment and disability. J. Hand Ther. 2017, 30, 491–499. [Google Scholar] [CrossRef] [PubMed]
- Sauni, R.; Pääkkönen, R.; Virtema, P.; Jäntti, V.; Kähönen, M.; Toppila, E.; Uitti, J. Vibration-induced white finger syndrome and carpal tunnel syndrome among Finnish metal workers. Int. Arch. Occup. Environ. Health 2009, 82, 445–453. [Google Scholar] [CrossRef]
- Boström, L.; Gothe, C.J.; Hansson, S.; Lugnegård, H.; Nilsson, B.Y. Surgical treatment of carpal tunnel syndrome in patients exposed to vibration from handheld tools. Scand. J. Plastic Reconstr. 1994, 28, 147–149. [Google Scholar] [CrossRef] [PubMed]
- Vihlborg, P.; Bryngelsson, I.L.; Lindgren, B.; Gunnarsson, L.G.; Graff, P. Association between vibration exposure and hand-arm vibration symptoms in a Swedish mechanical industry. Int. J. Ind. Ergon. 2017, 62, 77–81. [Google Scholar] [CrossRef]
- ISO 10819:2013; Mechanical Vibration and Shock—Hand-Arm Vibration—Method for the Measurement and Evaluation of the Vibration Transmissibility of Gloves at the Palm of the Hand. International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO 5349-1:2001; Mechanical Vibration-Measurement and Evaluation of Human Exposure to Hand-Transmitted Vibration—Part 1: General Requirements. International Organization for Standardizatio: Geneva, Switzerland, 2001.
- Wu, M.; Yang, F. Review of hand-transmitted vibration in hand-arm system. J. Huaqiao Univ. Nat. Sci. 2019, 40, 281–290. [Google Scholar]
- Saha, S.; Kalra, P. A review on hand-arm vibration exposure and vibration transmissibility from power hand tools to hand-arm system. Int. J. Fact. Ergon. 2016, 4, 10–46. [Google Scholar] [CrossRef]
- Xu, X.S.; Welcome, D.E.; Mcdowell, T.W.; Warren, C.; Dong, R.G. An investigation on characteristics of the vibration transmitted to wrist and elbow in the operation of impact wrenches. Int. J. Ind. Ergon. 2009, 39, 174–184. [Google Scholar] [CrossRef]
- Xu, X.S.; Dong, R.G.; Welcome, D.E.; Warren, C.; McDowell, T.W.; Wu, J.Z. Vibrations transmitted from human hands to upper arm, shoulder, back, neck, and head. Int. J. Ind. Ergon. 2016, 62, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Besa, A.J.; Valero, F.J.; Suñer, J.L.; Carballeira, J. Characterisation of the mechanical impedance of the human hand-arm system: The influence of vibration direction, hand-arm posture and muscle tension. Int. J. Ind. Ergon. 2007, 37, 225–231. [Google Scholar] [CrossRef]
- Adewusi, S.A.; Rakheja, S.; Marcotte, P.; Boutin, J. Vibration transmissibility characteristics of the human hand–arm system under different postures, hand forces and excitation levels. J. Sound Vib. 2010, 329, 2953–2971. [Google Scholar] [CrossRef]
- Xu, X.S.; Dong, R.G.; Welcome, D.E.; Warren, C.; McDowell, T.W. An examination of the hand-held adapter approach for measuring hand-transmitted vibration exposure. Meas. Interdiscp. Res. Perspect. 2014, 47, 64–77. [Google Scholar]
- Li, X.Z.; Yue, X.B.; Huang, W.; Dong, X.J.; Peng, Z.K. Vibration response transmissibility and operational model analysis methods: A review and comparative study. J. Vib. Shock 2019, 38, 24–34. [Google Scholar]
- Dong, R.G.; Rakheja, S.; Smutz, W.P.; Schopper, A.; Welcome, D.; Wu, J.Z. Effectiveness of a new method (TEAT) to assess vibration transmissibility of gloves. Int. J. Ind. Ergon. 2002, 30, 33–48. [Google Scholar] [CrossRef]
- Xu, X.S.; Welcome, D.E.; Mcdowell, T.W.; Wu, J.Z.; Wimer, B.; Warren, C.; Dong, R.G. The vibration transmissibility and driving-point biodynamic response of the hand exposed to vibration normal to the palm. Int. J. Ind. Ergon. 2011, 41, 418–427. [Google Scholar] [CrossRef]
- Pan, D.; Xu, X.S.; Welcome, D.E.; McDowell, T.W.; Warren, C.; Wu, J.; Dong, R.G. The Relationships between Hand Coupling Force and Vibration Biodynamic Responses of the Hand-Arm System. Ergonomics 2017, 61, 818–830. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Height (cm) | Weight (kg) | Hand Length (mm) | Hand Width (mm) | Hand Volume (mL) | Age (n) |
|---|---|---|---|---|---|---|
| A | 168.0 | 60.6 | 180 | 85 | 305 | 25 |
| B | 171.5 | 78.4 | 195 | 94 | 380 | 26 |
| C | 181.0 | 66.1 | 192 | 83 | 320 | 24 |
| D | 173.5 | 73.3 | 192 | 88 | 345 | 23 |
| E | 181.5 | 76.0 | 200 | 93 | 390 | 25 |
| F | 170.5 | 51.7 | 185 | 88 | 285 | 24 |
| Mean | 174.3 | 67.68 | 190.7 | 88.5 | 337.5 | 24.5 |
| SD | 5.15 | 9.34 | 6.52 | 3.95 | 38.2 | 0.96 |
| Arm Posture | Wrist Posture | Grip Force and Thrust Force | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| g0 N p20 N | g0 N p50 N | g0 N p80 N | g30 N p20 N | g30 N p50 N | g30 N p80 N | g60 N p20 N | g60 N p50 N | g60 N p80 N | ||
| SP1 | W2 | + | - | - | ~ | + | + | + | + | + |
| W3 | + | - | - | - | + | + | + | + | + | |
| W4 | + | - | - | - | + | + | + | + | + | |
| W5 | + | - | - | - | + | + | + | + | + | |
| SP2 | W2 | - | - | - | - | - | - | ~ | - | - |
| W3 | + | - | - | - | - | - | - | - | - | |
| W4 | + | - | - | - | ~ | + | + | + | + | |
| W5 | + | - | - | - | - | - | - | ~ | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, M.; Jia, S.; Lin, Z. An Experimental Study on the Vibration Transmission Characteristics of Wrist Exposure to Hand Transmitted Vibration. Appl. Sci. 2022, 12, 2232. https://doi.org/10.3390/app12042232
Wu M, Jia S, Lin Z. An Experimental Study on the Vibration Transmission Characteristics of Wrist Exposure to Hand Transmitted Vibration. Applied Sciences. 2022; 12(4):2232. https://doi.org/10.3390/app12042232
Chicago/Turabian StyleWu, Mingzhong, Sheng Jia, and Zhihong Lin. 2022. "An Experimental Study on the Vibration Transmission Characteristics of Wrist Exposure to Hand Transmitted Vibration" Applied Sciences 12, no. 4: 2232. https://doi.org/10.3390/app12042232
APA StyleWu, M., Jia, S., & Lin, Z. (2022). An Experimental Study on the Vibration Transmission Characteristics of Wrist Exposure to Hand Transmitted Vibration. Applied Sciences, 12(4), 2232. https://doi.org/10.3390/app12042232