


State Observer Based on an Accelerometer for an Elastic Joint with Nonlinear Friction



Abstract
1. Introduction
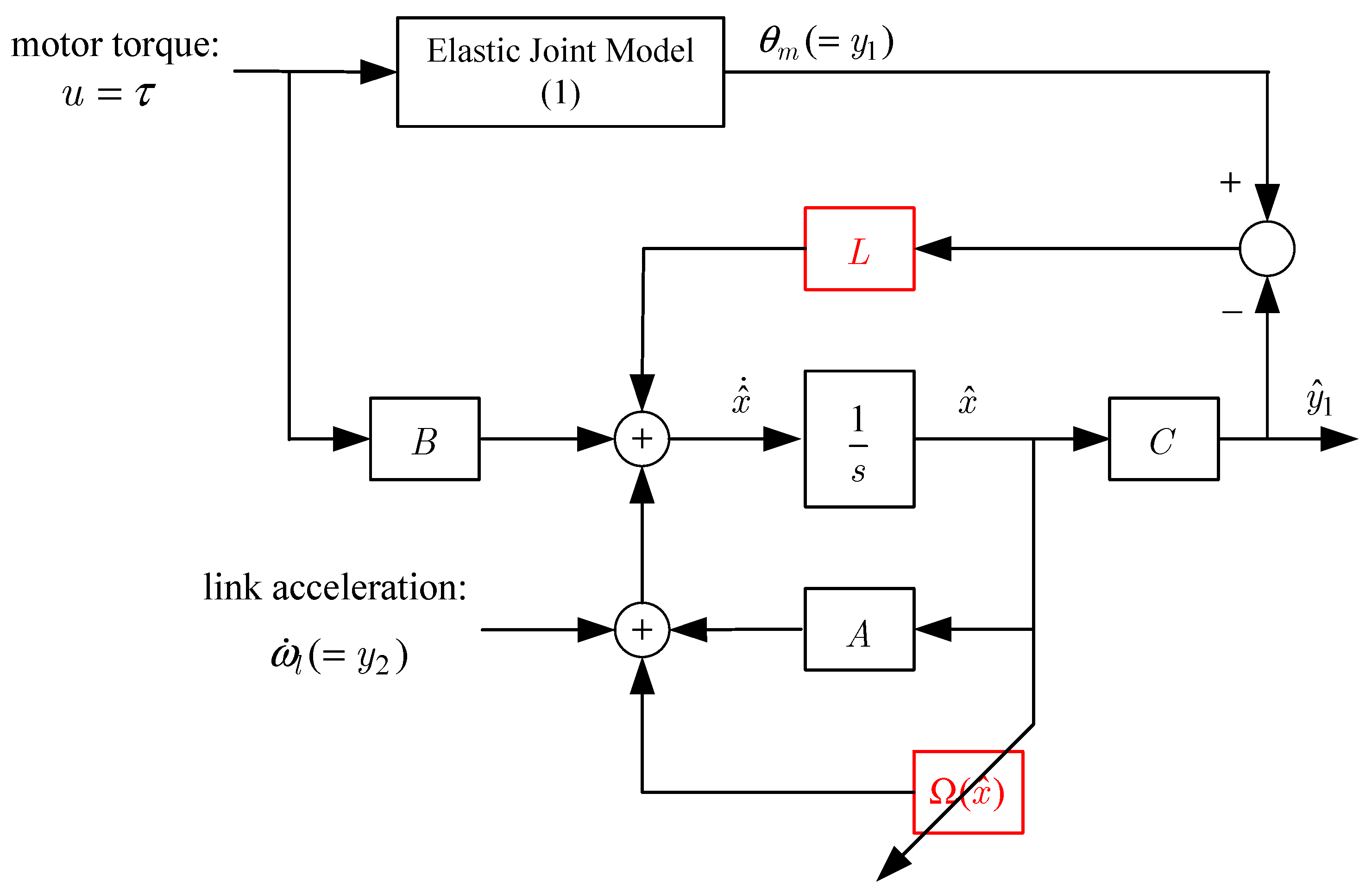
2. Problem Formulation and Solution
3. Stability and Performance Analysis
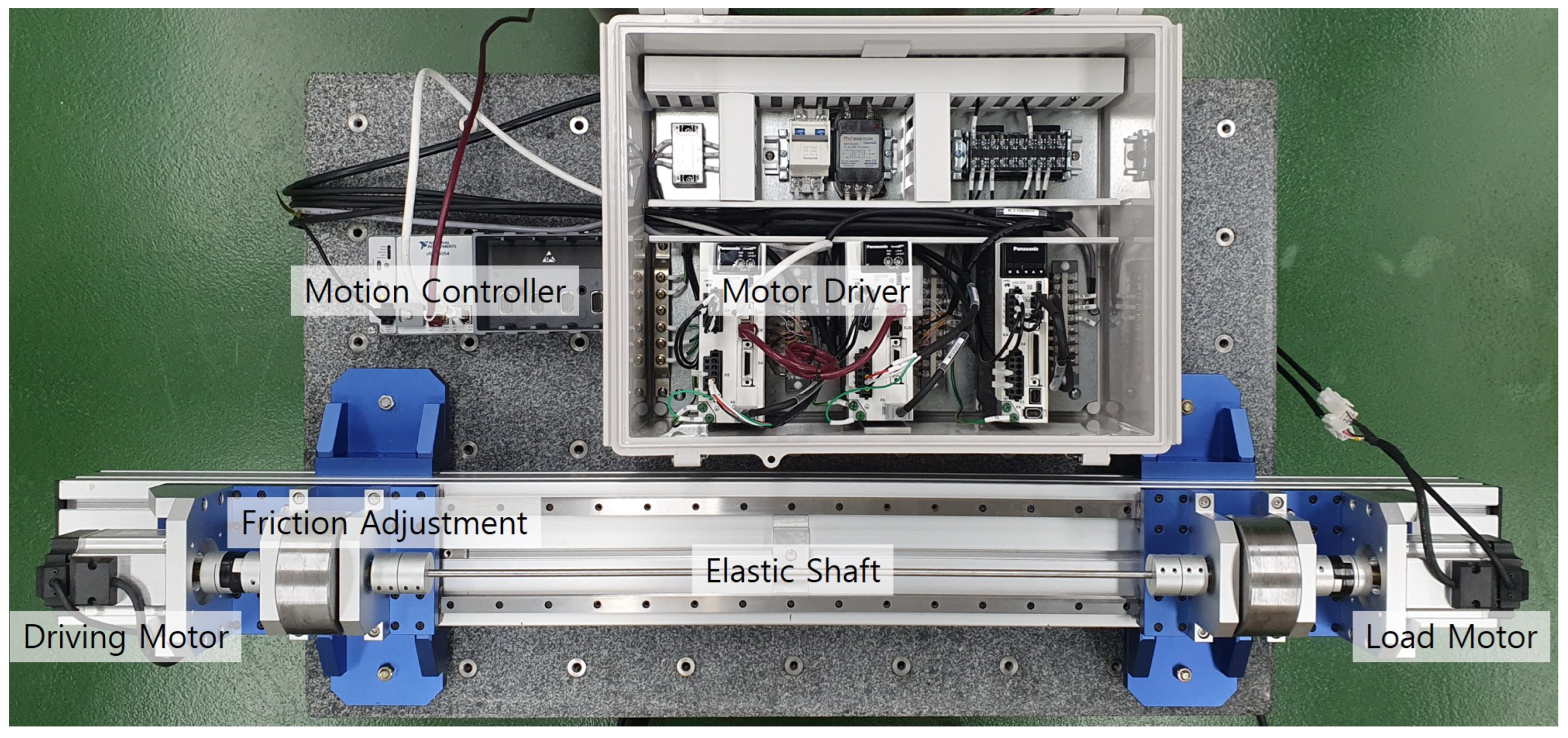
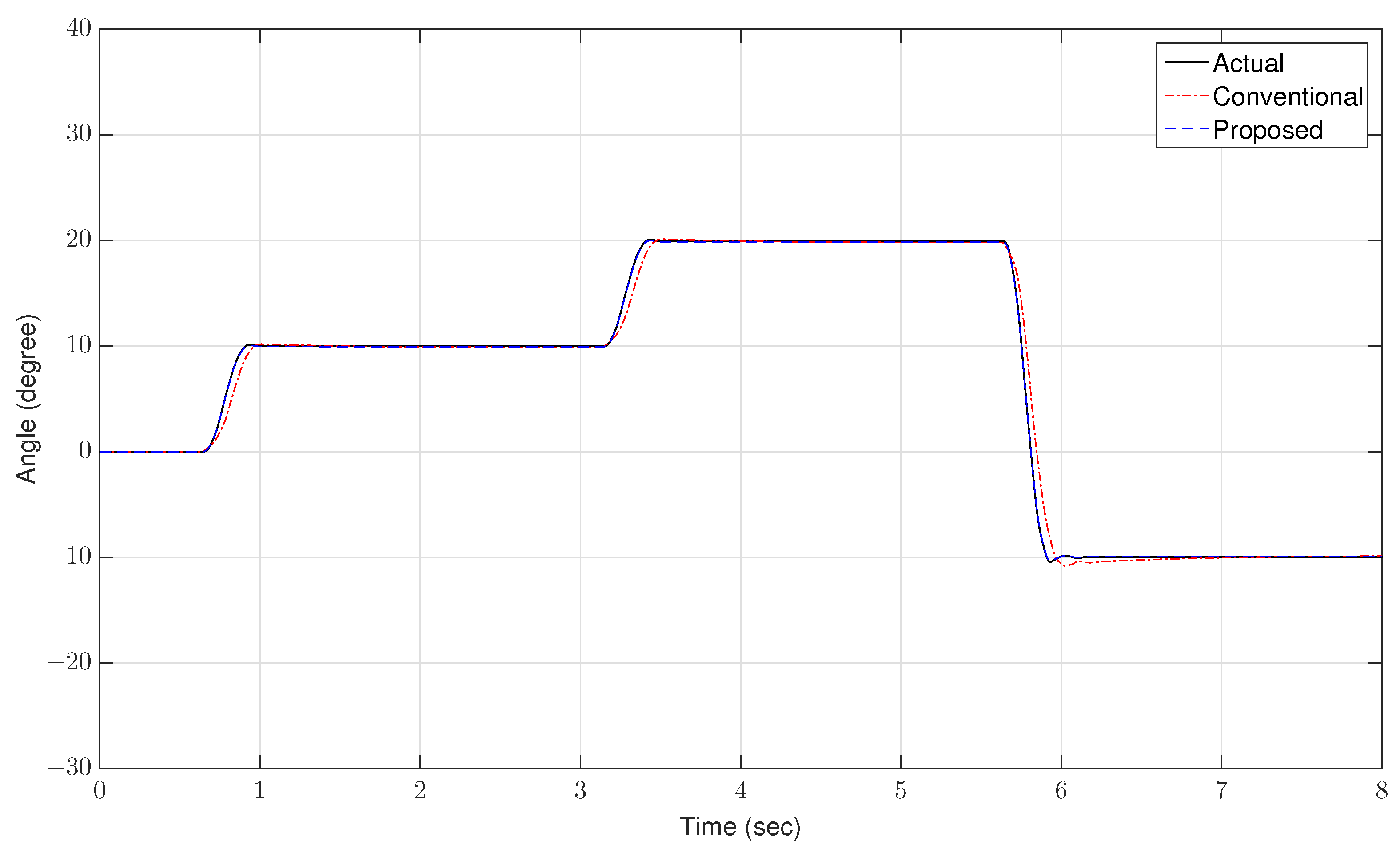
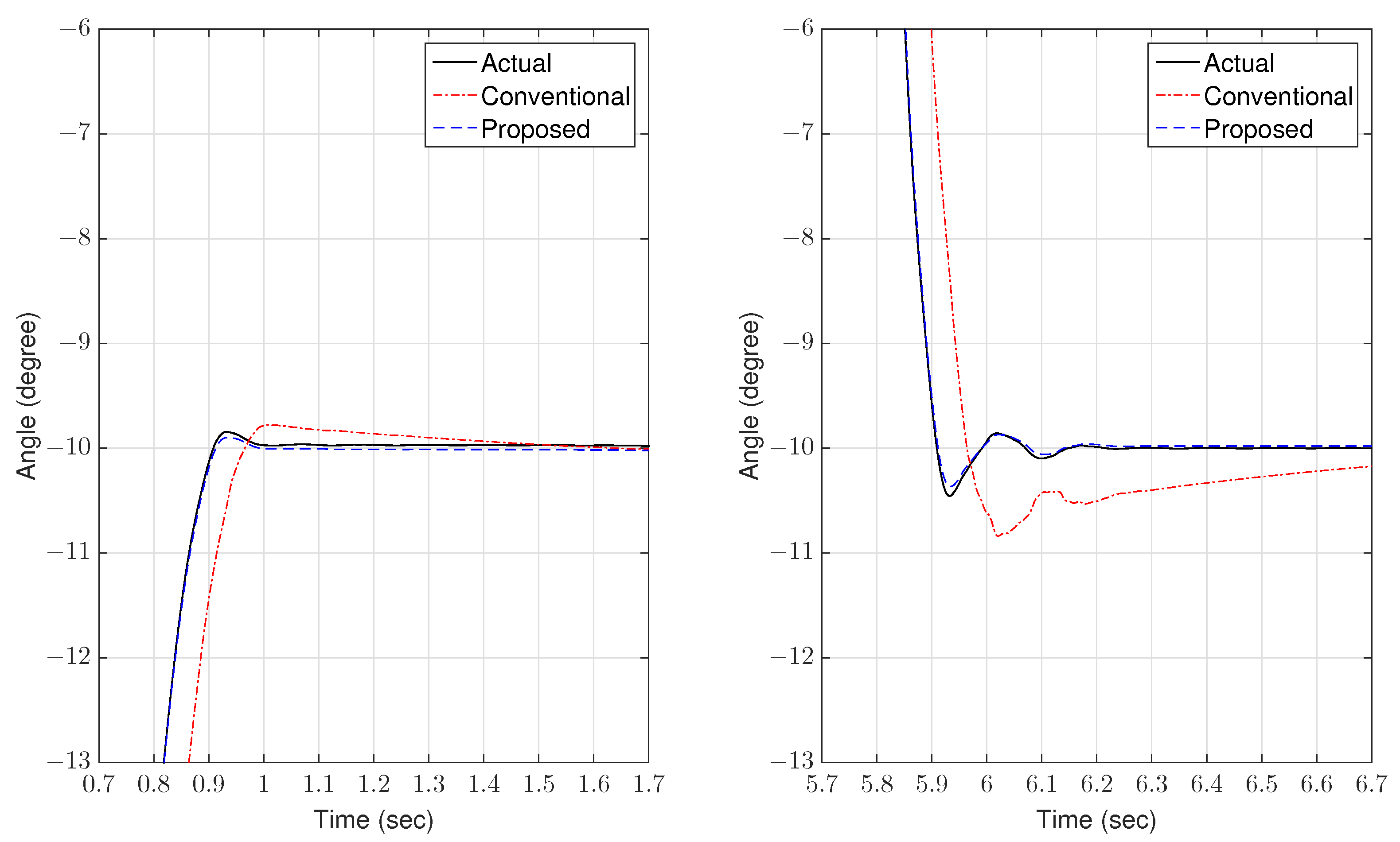
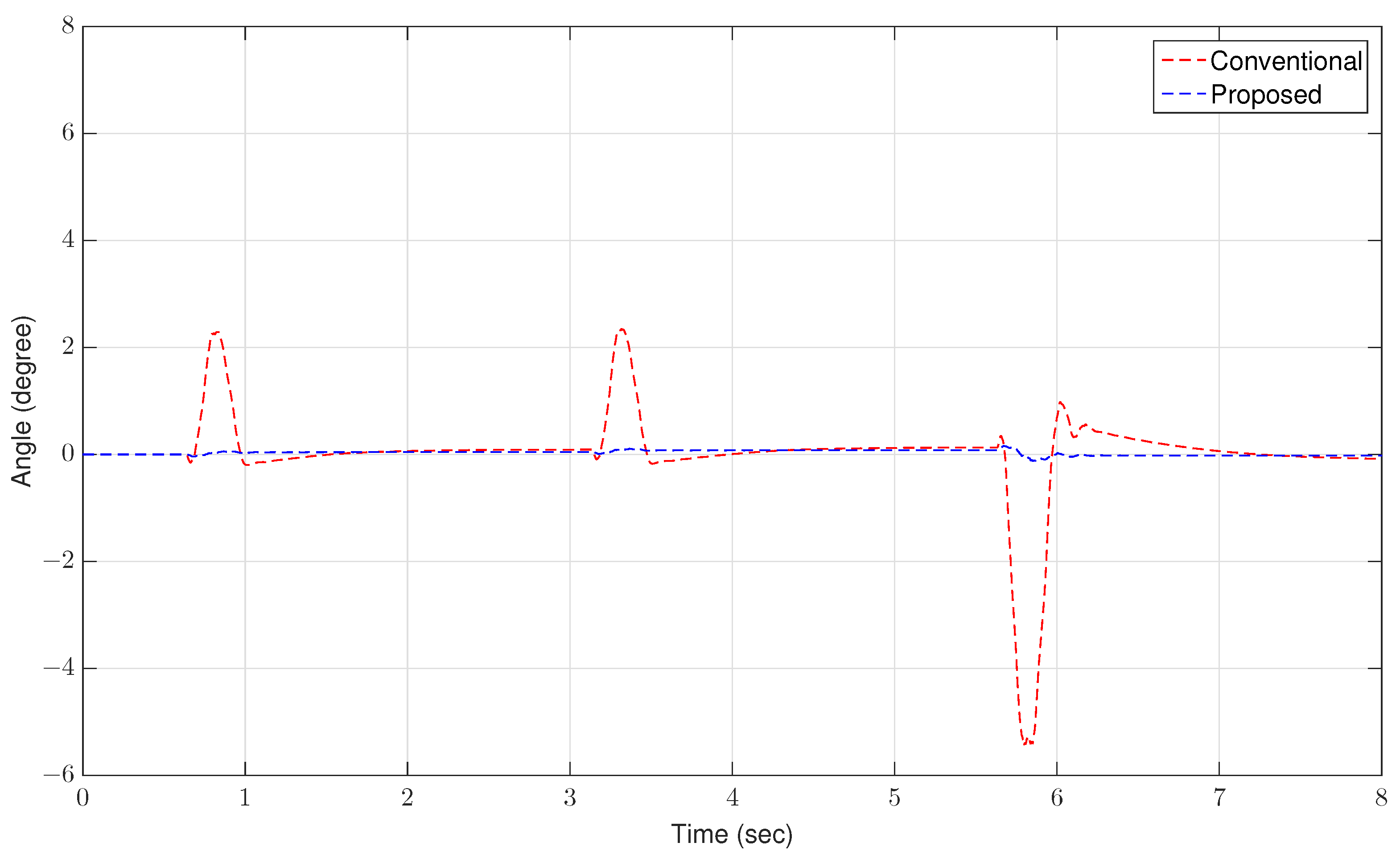
4. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Spong, M. Modeling and control of elastic joint robots. J. Dyn. Syst. Meas. Control 1987, 109, 310–319. [Google Scholar] [CrossRef]
- Spong, M.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Tomei, P. A simple pd controller for robots with elastic joints. IEEE Trans. Autom. Control 1991, 36, 1208–1213. [Google Scholar] [CrossRef]
- Bang, J.; Shim, H.; Park, S.; Seo, J. Robust tracking and vibration suppression for a two-inertia system by combining backstepping approach with disturbance observer. IEEE Trans. Ind. Electron. 2010, 11, 618–623. [Google Scholar] [CrossRef]
- Jankovic, M. Observer based control for elastic joint robots. IEEE Trans. Robot. Autom. 1995, 11, 618–623. [Google Scholar] [CrossRef]
- Lotfi, N.; Namvar, M. Global adaptive estimation of joint velocities in robotic manipulators. IET Control Theory Appl. 2010, 4, 2672–2681. [Google Scholar] [CrossRef]
- Moberg, S.; O¨hr, J.; Gunnarsson, S. A benchmark problem for robust control of a multivariable nonlinear flexible manipulator. IFAC World Congress 2008, 41, 1206–1211. [Google Scholar] [CrossRef]
- Chen, W.; Tomizuka, M. Comparative study on state estimation in elastic joints. Asian J. Control. 2014, 16, 818–829. [Google Scholar] [CrossRef]
- Nam, K.; Lee, S.; Kuc, T.; Kim, H. Position and velocity estimation for two-inertia system with nonlinear stiffness based on acceleration sensor. Sensors 2016, 16, 49. [Google Scholar] [CrossRef] [PubMed]
- Rajamani, R. Observers for lipschitz nonlinear systems. IEEE Trans. Automat. Contr. 1998, 43, 397–401. [Google Scholar] [CrossRef]
- Rajamani, R.; Cho, Y.M. Existence and design of observers for nonlinear systems: Relation to distance to unobservability. Int. J. Cont. 1998, 69, 717–731. [Google Scholar] [CrossRef]
- Song, B.; Hedrick, J.K. Nonlinear observer design for lipschitz nonlinear systems. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 2578–2583. [Google Scholar]
- Kim, H.; Sul, S. A new motor speed estimator using kalman filter in low-speed range. IEEE Trans. Ind. Electron. 1996, 43, 498–504. [Google Scholar]
- Friedland, B.; Park, Y.J. On adptive friction compensation. IEEE Trans. Autom. Control 1992, 37, 1609–1612. [Google Scholar] [CrossRef]
- Tafazoli, S.; de Silva, C.W.; Lawrence, P.D. Tracking control of an electrohydraulic manipulator in the presence of friction. IEEE Trans. Control Syst. Technol. 1998, 6, 401–411. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Khalil, H. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Sugiura, K.; Hori, Y. Vibration suppression in 2- and 3-mass system based on the feedback of imperfect derivative of the estimated torsional torque. IEEE Trans. Ind. Electron. 1996, 43, 56–64. [Google Scholar] [CrossRef]
- Yun, J.; Su, J.; Kim, Y.; Kim, Y. Robust disturbance observer for two-inertia system. IEEE Trans. Ind. Electron. 2013, 60, 2700–2710. [Google Scholar] [CrossRef]
- Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Multi-jump resonance systems. Int. J. Cont. 2020, 93, 282–292. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
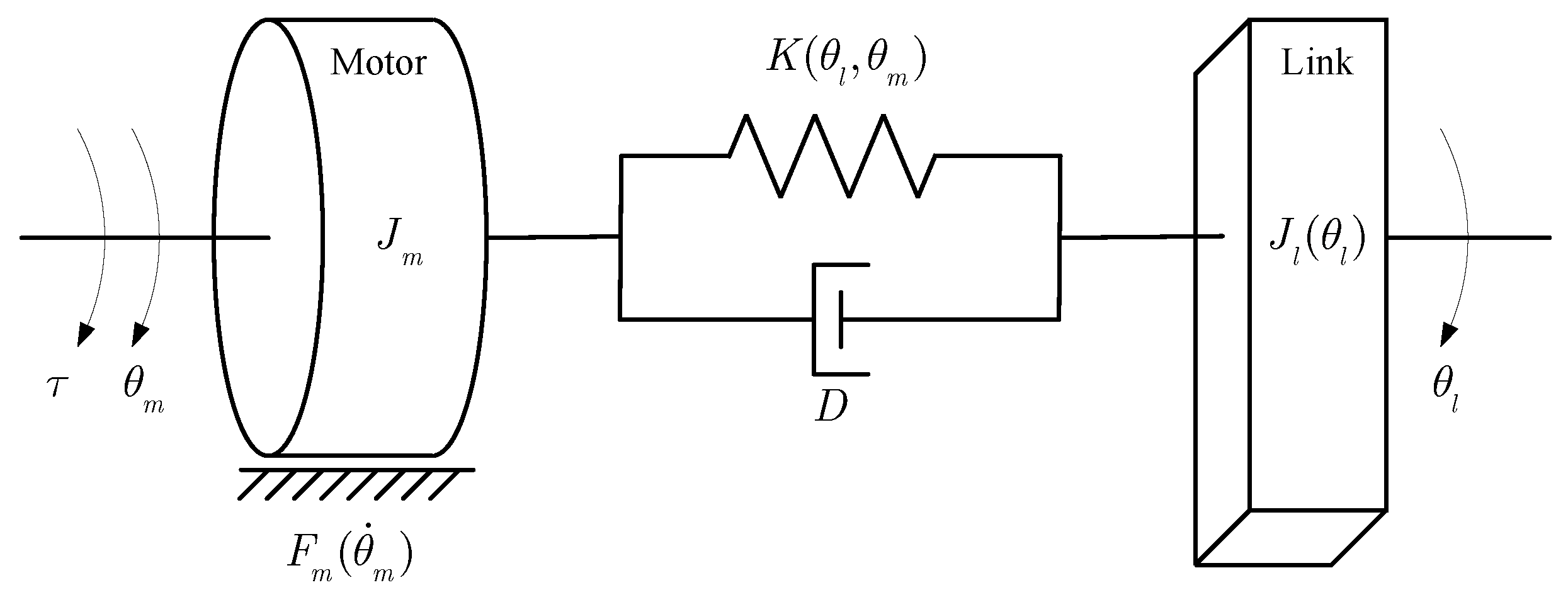
| damping (D) | 600 | Nm · s/rad |
| motor inertia () | 0.001027 | kg · m |
| linear stiffness coefficient () | 1.5 | Nm/rad |
| nonlinear stiffness coefficient () | 9.85 | Nm/rad |
| breakpoint deflection () | 2 | arcmin |
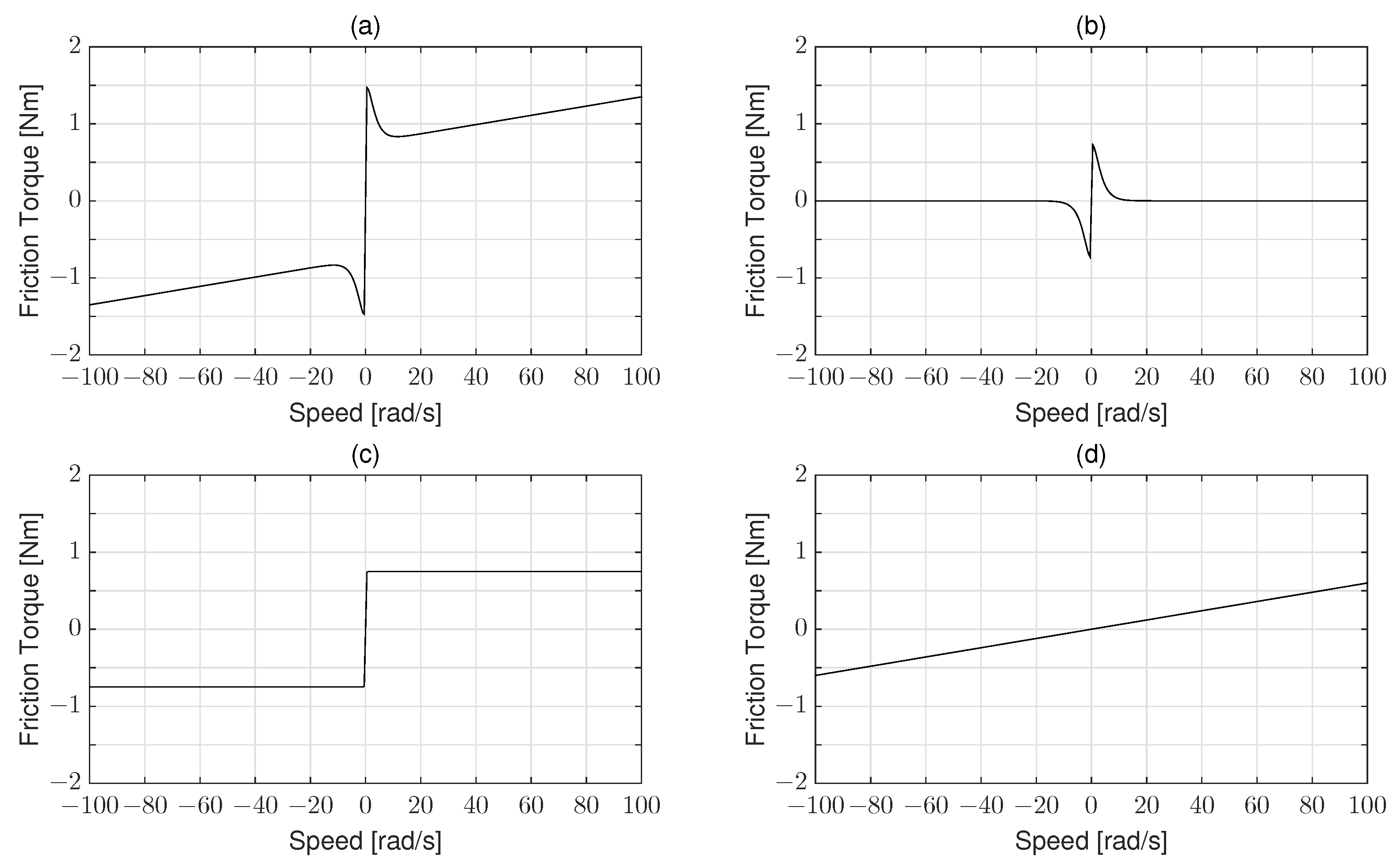
| viscous friction coefficient () | 0.006 | Nm · s/rad |
| coulomb friction coefficient () | 1.5 | Nm |
| 0.5 | ||
| 0.5 | ||
| 5 |
| Parameter | Value |
|---|---|
| observer gain L |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.-H.; Kim, H.; Kuc, T.-Y. State Observer Based on an Accelerometer for an Elastic Joint with Nonlinear Friction. Appl. Sci. 2022, 12, 12991. https://doi.org/10.3390/app122412991
Lee K-H, Kim H, Kuc T-Y. State Observer Based on an Accelerometer for an Elastic Joint with Nonlinear Friction. Applied Sciences. 2022; 12(24):12991. https://doi.org/10.3390/app122412991
Chicago/Turabian StyleLee, Kwang-Hee, Hyungjong Kim, and Tae-Yong Kuc. 2022. "State Observer Based on an Accelerometer for an Elastic Joint with Nonlinear Friction" Applied Sciences 12, no. 24: 12991. https://doi.org/10.3390/app122412991
APA StyleLee, K.-H., Kim, H., & Kuc, T.-Y. (2022). State Observer Based on an Accelerometer for an Elastic Joint with Nonlinear Friction. Applied Sciences, 12(24), 12991. https://doi.org/10.3390/app122412991