Abstract
This paper proposes a new navigation modulation based on orthogonal frequency division multiplexing (OFDM). We derived the autocorrelation function and power spectral density of the OFDM modulation. The influence of the cyclic prefix and zero-padding is discussed. The influence of OFDM modulation parameters on navigation signal performance was deeply analyzed, which can help signal designers choose the OFDM parameters. The main peak of the proposed autocorrelation function is narrow and has good tracking accuracy. The sidelobe is lower, and the delay locking loop is more robust. The power spectrum density is evenly distributed in the main lobe of the signal, and the anti-interference is good. By comparing OFDM navigation signals with other navigation signals, it can be found that OFDM navigation signals have good tracking accuracy and a strong anti-interference ability. Combined with the proposed navigation modulation and communication signal, the OFDM navigation signal has a low bit error rate for the communication signal and has a good communication integration potential, which can meet the business requirements of the future communication and navigation integration market.
1. Introduction
With the rapid development of autonomous driving, 5G, and Internet technologies, especially the rise of concepts such as the Internet of Things and smart city, the demand for location-based services is increasing. Currently, the Global Navigation Satellite System (GNSS) can provide high-precision location services outdoors, with high-precision positioning, navigation, and timing capability; along with a ubiquitous and high-speed information transmission capability, the company has achieved vigorous development. However, the ground navigation signal power is weak and is vulnerable to physical space environment disturbance. The transmission rate of the navigation message is low and the types of navigation services are few. The GNSS cannot meet users’ personalized needs in complex environments [1]. In particular, the requirements for positioning accuracy, serviceability, anti-interference performance, etc. greatly limit the application scope and depth of satellite navigation applications. Communication navigation fusion positioning technology has become an effective means to solve indoor positioning problems and enhance location service capabilities, and it is a key supporting technology for comprehensive positioning navigation timing systems [2]. Ubiquitous high-precision space-time information will play an important role in future developments [3,4], and communication navigation fusion is a general trend for future developments [5,6,7,8]. Communication and navigation integration is conducive to the complementarity of communication and navigation signals. The integration of communication and navigation means that the same system can realize two functions. The short message function of the BeiDou navigation satellite system is a typical case of communication and navigation integration [9]. The waveform fusion of communication and navigation refers to the integration design of navigation and communication on the level of physical signals. The integration design of communication and navigation at the signal system level is the foundation of fusing the two systems and is also a hotspot of current research. The on–on fusion at the signal design level can increase spectrum utilization and reduce resource occupancy.
At present, many scholars in related fields have conducted a lot of research on the signal system design of communication fusion, mainly including a signal design based on mobile communication and other communication systems. The orthogonal frequency division multiplexing (OFDM) was first presented by Chang [10,11,12] and was developed by Weinstein and Ebert [13] and Cimini [14]. Sen and Nehorai proposed an adaptive technique in designing the spectrum of orthogonal frequency division multiplexing (OFDM) waveforms to improve the broadband ambiguity function of the signal. Adaptive OFDM signals produce better autocorrelation functions (ACF), thus improving the delay (range) resolution of the system. This design scheme can place more signal energy on sub-carriers with a weak target response [15]. Mohseni et al. introduced constant envelope OFDM signals, which combined OFDM and phase modulation or frequency modulation; this effectively solved the problem of OFDM signals being vulnerable to the influence of system nonlinearity because of their large fluctuations [16]. Kim et al. proposed a new OFDM-based waveform (TS-W-OFDM). TS-W-OFDM uses a windowing program to improve the spectral efficiency. Compared with the traditional cyclic prefix of OFDM, the windowing OFDM (W-OFDM) and weighted overlap and addition-based OFDM (WOLA-OFDM), TS-W-OFDM had a higher spectral efficiency and almost the same error rate, and its complexity was lower than that of W-OFDM, WOLA-OFDM, and F-OFDM [17]. Vahid et al. proposed an OFDM signal design scheme with an adaptive structure based on maximizing the mutual information of the transmitted waveform between the random target impulse response and the received echo, taking advantage of the benefits of the OFDM signal. Compared with the non-adaptive waveform design method, the proposed method achieved a higher performance [18].
The time & code division-OFDM signal system, proposed by Deng et al. is a typical technology for the design of pass-through fusion signals. By superimposing the navigation signal onto the OFDM signal, the TC-OFDM signal can be realized. At the same time, the continuous acquisition and tracking of positioning signals are realized [19]. Liu proposed a frequency domain composite OFDM modulation scheme, which applied a spread spectrum sequence to frequency domain modulation combined with OFDM in a communication system. The author studied the fusion method of communication and navigation signals from the level of signal modulation and achieved a good compatibility of pass-through signals [20]. Xu proposed the integrated waveform design of communication and navigation systems based on spread spectrum modulation, where the author evaluated the interaction between the communication and navigation components [21]. Ji et al. proposed a new signal modulation scheme named CE-OFDM-PM, which is suitable for the S-band and has a wide normalized power spectral density (PSD) and high main peak sidelobes ratio. It is capable of high tracking accuracy, and the code tracking accuracy can reach 0.85 m [22]. Lan et al. proposed a modulation mode of the OFDM signal based on a subchirp bandwidth overlap and piecewise transceiver. The modulation scheme reduces the ASP of a signal by designing a reasonable sweep bandwidth range and piecewise transceiver mode, and the designed signal had good detection performance in MIMO radar monitoring [23].
In addition, from the perspective of the signal design system, Ma et al. proposed a future-oriented, frequency-hopping binary offset carrier modulation scheme with integrated on-conduction, aiming to improve the anti-interference ability of signal navigation [24]. Xue et al. proposed a multifunctional signal based on the modulation of binary offset carrier (BOC) and binary phase shift keying (BPSK), which contained measurement, navigation, and communication functions, and can effectively simplify the receiver structure and improve spectral utilization. The different signals are quadrature in the frequency domain, so the data transmission signal has no impact on the BOC signals. It is a l reference for communication and navigaiton integration [25]. These designs can also be seen as integrated reference solutions for communication and guidance.
The main reason why OFDM modulation technology can be widely used is that it is very effective against multipath delay expansion. The OFDM modulation mode has high data transmission, spectrum utilization, and anti-multipath fading characteristics. This paper proposes an navigation signal modulation method based on OFDM, combining the direct sequence spread spectrum (DSSS) and OFDM modulation technologies. High tracking accuracy, accomplished by using a high-frequency subcarrier to increase the energy of the navigation signal at high frequency, is conducive to improving the tracking performance of the code ring. Other obvious advantages are that the tracking accuracy can reach 0.2 m, and has a strong robustness, good anti-interference performance, and anti-multipath ability.
In this paper, the mathematical model of the OFDM-modulated navigation signal is firstly proposed, and the analytical expressions of the autocorrelation function (ACF) and PSD of the OFDM-modulated navigation signal are deduced and verified in detail. The influence of each modulation parameter on the performance of the OFDM-modulated navigation signal is also systematically analyzed. The performance of different types of navigation signals is compared and evaluated. On the basis of a qualitative analysis, we carried out a quantitative analysis and evaluation of the OFDM-modulated navigation signals using the aspects of tracking accuracy, code loop parameters, and anti-interference ability. We examined the influence of the signal in the conduction integration. The simulation showed that the OFDM navigation signal showed good compatibility in the fusion of communication signals, and thus has wide application prospects, which provides a feasible reference scheme for the integration of communication and conduction.
2. Mathematical Model of OFDM Navigation Signal Modulation System
OFDM is a very widely used multicarrier modulation technique. OFDM converts serial data into parallel data, and then performs an M-order modulation of the data, such as by using BPSK, QAM, M-QAM, etc., and transforms the modulated data into an inverse Fourier transform. The OFDM adds a guard period to suppress inter-symbol interference and subcarrier interference (inter-carrier interference).
Referring to the classical OFDM communication signal modulation mode, the modulation method of the OFDM navigation signal is proposed. The mathematical expression of an OFDM symbol is as follows [14]:
where is the number of subcarriers, is the information modulated by the kth subcarrier in the nth symbol in a frame of OFDM, and is the subcarrier interval.
The OFDM signal frame structure is shown in Figure 1 [26]. A frame OFDM signal is usually composed of multiple OFDM symbols, and each OFDM frame is composed of OFDM symbols and protection intervals in the time domain. The time domain expression of OFDM navigation signals with protection intervals is:

Figure 1.
OFDM frame structure diagram.
In the formula, represents the OFDM symbol and represents the protection interval.
The OFDM modulation time domain signals and can be derived from :
In the formula, is the signal in a frame OFDM, is the useful time length of a symbol, , is the length of the protection interval, is the time length of a symbol, , is the number of symbols contained in a frame OFDM, and and represent the time domain window function, which is used to control the influence of the OFDM symbol and protection interval.
A further finishing of the above formula yields:
Substituting Equation (4) into Equation (2) yields the time domain expression of the OFDM navigation signal.
3. ACF and PSD Derivation Verification of OFDM Navigation Signal Modulation System
The ACF and PSD of the OFDM navigation signal are two very important parameters in the performance analysis and evaluation of the navigation signal [27]. Deriving the ACF of the OFDM signal and the analytical expression of power spectral density can simplify the amount of simulation analysis operations, improve the analysis efficiency of the navigation signals, and facilitate the analysis and design of various characteristics concerning the navigation signals. In this paper, the ACF and PSD analysis expression of the OFDM navigation signal are derived in detail, and the ACF, PSD, and analytical expression operation results are compared in the form of a simulation to verify the correctness of the analytical expression derivation of the two parameters.
3.1. ACF of OFDM Navigation Signal
Starting from the definition of the autocorrelation function, the autocorrelation function of the OFDM navigation signal can be obtained using:
where is the expected value of the autocorrelation function, is the delay of the received signal and the local signal, is the autocorrelation function of the OFDM symbol, is the autocorrelation function of the protection interval, is the cross-correlation function of the OFDM symbol and the protection interval, and is the cross-correlation function of the protection interval and OFDM symbol.
As can be seen from Equation (5), the autocorrelation function of the OFDM navigation signal can be decomposed into the autocorrelation function of the OFDM symbol, ACF of the protection interval, and cross-correlation function of the OFDM and protection interval.
The ACF of the OFDM symbol can be expressed as:
where and represent the pseudo-code sequence.
Because pseudo-code sequence A is independently homogeneous and has the following autocorrelation characteristics:
where or , that is, when the symbols in the pseudo-code sequence are different, the correlation result of the two different symbols is 0, and is further derived from the expression of:
is a function with a period , and the mean value of is also a function with a period of . According to the definition of the generalized cyclic stationary process, variable in the expression of ACF can be eliminated and the average ACF can be obtained as follows:
where * is convolution function and .
The zero-padding mode is a special cyclic prefix mode without the loss of generality. In the following calculation, we first calculate in the cyclic prefix mode, where the zero-padding mode can thus be easily obtained according to the derivation process of the cyclic prefix mode. According to the above method, you can find , , and in turn.
where , , and .
Combining the above formula, the average ACF of the correlation function is obtained:
3.2. OFDM Navigation Signal PSD
The PSD of the OFDM navigation signal can be obtained by a Fourier transform of the ACF:
where is the power spectral density of the OFDM symbol, is the power spectral density of the protection interval, is the power spectral density of the offline correlation function of the OFDM and protection interval, and is the power spectral density of the mutual correlation function of the protection interval and OFDM. That is, the PSD of the OFDM navigation signal is composed of the PSD of the OFDM symbol, the PSD of the protection interval, and the PSD of the cross-correlation function of the OFDM symbol and the protection interval.
Calculate the Fourier transforms of A, B, C, and D, respectively:
Taking the PSD of the OFDM symbol as an example, the corresponding Fourier transform is as follows:
where is the shock response function and is the frequency domain function of , .
Similarly, using the same derivation method, the PSD ,, and can be obtained in turn as follows:
In the substitution of Equations (21)–(23) into Equation (14), the PSD of the OFDM navigation signal is obtained.
3.3. PSD and ACF Parsed Expression Experimental Verification
This section verifies the correctness of the ACF of the OFDM navigation signal and the PSD analysis expression through simulation, such as using Equations (13) and (14). The ACF and PSD generation process in the form of simulation are as follows: a time domain signal is generated according to the OFDM modulation model, then the autocorrelation operation is performed and the simulated ACF is obtained. The simulated power spectral density can be obtained by performing a Fourier transform on the simulated ACF.
Figure 2 shows the results of the OFDM navigation signal’s ACF and PSD simulations compared with the parsing expression. As can be seen from Figure 2a,b, the ACF of the OFDM navigation signal has a narrow and sharp main peak; next to the main peak are multiple secondary peaks, but the peak of the secondary peak is lower and is obviously suppressed. When the OFDM navigation signal selects the cyclic prefix mode, it can be found that at abscissa 1 µs and −1 µs, there is a pair of left-right symmetrical secondary peaks, which are caused by the cyclic prefixes. In zero-padding mode, there is no similar secondary peak. As can be seen from Figure 2c,d, the PSD of the OFDM navigation signal presents an approximately flat form, and there is no obvious distinction between the main and secondary lobes; Compared with the PSD in the cyclic prefix and zero-padding modes, it can be found that the PSD energy of the zero-padding mode is primarily concentrated in the main lobe, and the zero-padding model is more concentrated than the PSD energy in the cyclic prefix mode.
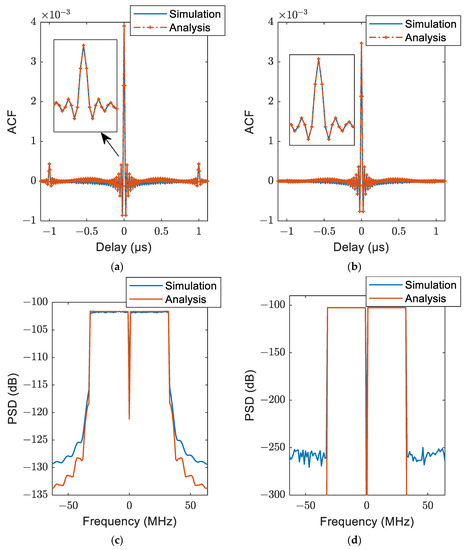
Figure 2.
Comparison of the ACF and PSD simulation results and the theoretical results of the OFDM navigation signals. (a) The ACF of the OFDM navigation signal in cyclic prefix mode; (b) The ACF of the OFDM navigation signal in zero-padding mode; (c) The PSD of the OFDM navigation signal in cyclic prefix mode; (d) The PSD of the OFDM navigation signal in zero-padding mode.
According to the experimental results, we find that the parsing expression is consistent with the numerical simulation results, and the correctness of the parsing expression is verified. In the simulation process, the analytical expression can save many operations compared with the numerical simulation, and the operation efficiency is high, which provides convenience for the signal analysis.
4. Analysis of ACF and PSD
The ACF and PSD of the navigation signal are directly related to the quality of the navigation signal and reception performance of the receivers. This section first analyzes the influence of the OFDM modulation parameters on the navigation characteristics. Then, the OFDM navigation signal is compared with several different navigation signals to analyze the navigation performance.
4.1. Modulation Parameter Analysis
In mathematical model Equation (2) of the OFDM navigation signal, listed are the main parameters in the OFDM modulation process: is the number of subcarriers, Δf is the subcarrier interval, and is the length of the protection interval. A unique OFDM modulation method can be determined by setting these four parameters. In this summary, we discuss the impact of the OFDM parameters on the ACF and PSD, which helps signal designers choose the appropriate OFDM parameter.
4.1.1. Effect of Number of Subcarriers K on Navigation Characteristics
The experimental conditions are set as follows: the subcarrier interval is 0.1 MHz, OFDM a symbol useful time , time domain sampling interval is , cyclic prefix length is , and subcarrier number is 32, 64, 128, and 256. Figure 3 and Figure 4 show the change law of the ACF and PSD of the four sets of OFDM navigation signals with the value of parameter K. Figure 3 shows that the ACF of OFDM navigation signal has multiple peaks, with a narrow and sharp main peak. The secondary peaks on both sides of the main peak are symmetrical with respect to the main peak, and the secondary peaks on both sides of the main peak are lower than the main peak. Near the abscissa 1 µs, there is a large secondary peak in the ACF, which is caused by the cyclic prefix. When other parameters do not change and the number of subcarriers increases, it can be found that the main peak of the ACF gradually narrows, and the tracking accuracy of the code loop improves. The value of the accessory peak near the main peak decreases, and the signal is not easy to mislock in the tracking process. However, at the horizontal coordinate 1 µs, the value of the secondary peak caused by the cyclic prefix becomes larger, which is prone to mislocking in the process of a phase-locked loop capture; the position of the secondary peak, however, will not change. Figure 4 shows the PSD of several groups of OFDM navigation signals. It can be found that there is a depression at the center frequency point of the carrier PSD of the OFDM navigation signals, and the two sides are symmetrically distributed. There is only one set of symmetric two main lobes in the PSD, which are relatively flat. When other conditions are unchanged, increasing the number of subcarriers will gradually expand the spectrum occupied by the main PSD lobe, so that the receiver needs to use more bandwidth at the front of the receiving end and has a stronger anti-interference ability. The amplitude of the PSD function of the main lobe is reduced, and the same level of amplitude can transmit more power.

Figure 3.
The ACF of OFDM navigation signals with a different number of subcarriers.
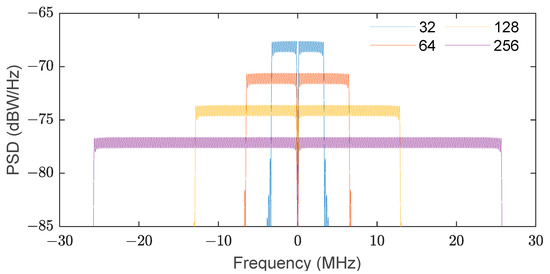
Figure 4.
The PSD of OFDM navigation signals with a different number of subcarriers.
4.1.2. Effect of Subcarrier Interval on Navigation Characteristics
The experimental conditions are as follows: the number of subcarriers is 128, useful time of one symbol of the OFDM is , time domain sampling interval is , cyclic prefix length is , and subcarrier interval Δf is 0.05, 0.1, 0.2, and 0.3 MHz, respectively. Figure 5 and Figure 6 shows the change law of the ACF and PSD of the four sets of OFDM navigation signals with the value of Δf. When the other conditions remain unchanged, as the subcarrier interval increases, the main peak of the ACF gradually narrows, and the code ring tracking accuracy becomes larger. The sub-peak of the ACF has basically no impact, but it will affect the position of the secondary peak; when the secondary peak is closer to the main peak, it is easy to lock secondary peak and this lock is false lock. By analyzing several sets of OFDM-modulated PSD, it can be found that when the subcarrier interval increases, the main lobe of the PSD density increases, the amplitude of the main lobe gradually decreases, and the width of the depression at the center of the main lobe becomes larger.
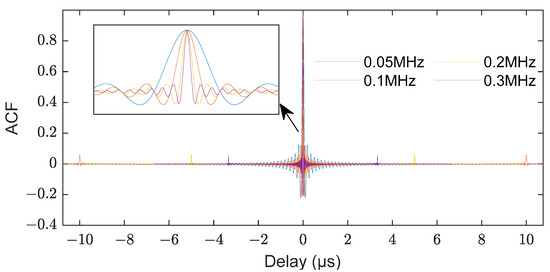
Figure 5.
The ACF with different subcarrier intervals.
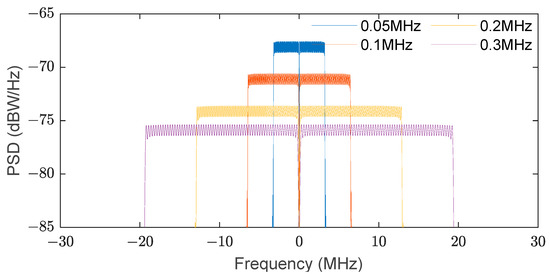
Figure 6.
The PSD with different subcarrier intervals.
4.1.3. Influence of Subcarrier Number K on Navigation Characteristics
The experimental conditions are as follows: the number of subcarriers K is 128, subcarrier interval is 1 MHz, useful time of one symbol of OFDM is , and time domain sampling interval is . Figure 7 shows the ACF and PSD of the OFDM navigation signals in the zero-padding and cyclic prefix modes. It can be seen from Figure 7a that the main peaks of the ACF in the zero-padding and cyclic prefix modes are basically the same when other conditions are unchanged. However, there is a secondary peak generated in the ACF of cyclic prefix mode near the abscissa of 1.5 μs. The zero-padding mode has no effect on the ACF. It can be found from Figure 7a that the PSD main lobe widths of the OFDM navigation signal in the cyclic prefix and zero-padding modes are basically the same, but the PSD in the cyclic prefix mode is slightly lower than that of the zero-padding mode (by about 1 dB).
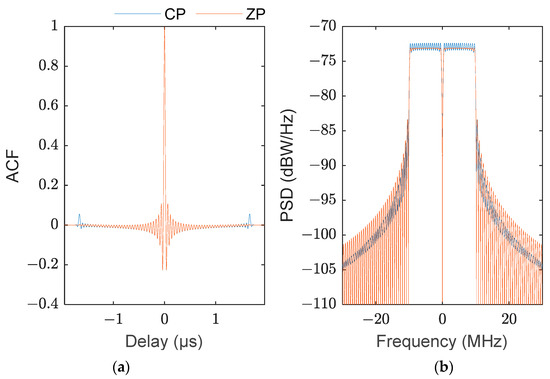
Figure 7.
Effect of guard interval type on the ACF and PSD. (a) The ACF of the OFDM navigation signals with different guard interval types; (b) The PSD of the OFDM navigation signals with different guard intervals.
4.1.4. Effect of Cyclic Prefix Length on Navigation Characteristics
We assume that the bandwidth of the receiver is much larger than that of the navigation signal, ignoring the effect of the filter on the signal. Similar to the analysis in Section 4.1.3, when the other experimental conditions are unchanged, the length of the cyclic prefix mode is changed and successively set as . Figure 8a shows that for different cyclic prefix lengths, the main peak of the ACF and the secondary peak near the main peak basically do not change. Near the horizontal coordinate 1 μs, the secondary peak caused by the cyclic prefix mode increases with the increase in cyclic prefix, but the position and width of this secondary peak basically do not change. The length of the cyclic prefix is generally determined according to the maximum multipath delay in the actual application environment. As can be seen from the figure, the smaller the length of the cyclic prefix, the lower the peak value of the secondary peak in the ACF of the OFDM navigation signal. Therefore, choosing a smaller length of cyclic prefix can reduce the peak value of the ACF secondary peak and avoid the false lock of the code tracking loop. As can be seen in Figure 8b, when the cyclic prefix increases, the main lobe bandwidth occupied by the PSD of the OFDM navigation signal remains unchanged, and the PSD will slightly increase.
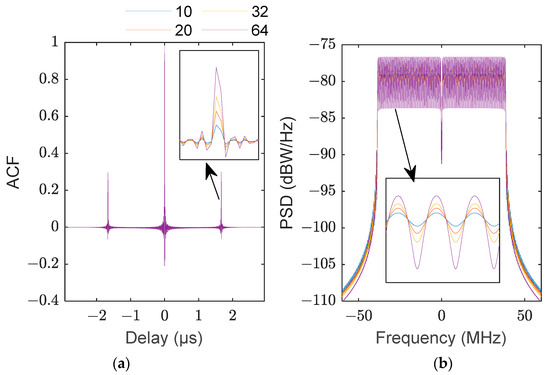
Figure 8.
Effect of the guard interval length on the ACF and PSD. (a) The ACF of the OFDM navigation signals with different cyclic prefix lengths; (b) The PSD of the OFDM navigation signals with different cyclic prefix lengths.
4.2. Modulation Parameter Analysis
We set the receiver RF front-end bandwidth to 36 M, and selected several groups of typical navigation signals for analysis. The binary phase shift modulation BPSK-R is a widely used navigation modulation method. The modulation and demodulation processes are simple. BPSK-R(1) and BPSK-R(10) are used in GPS civil and military navigation signals, respectively. Binary square wave subcarrier BOC modulation in the construction process is a new navigation signal modulation method proposed by Galileo and BeiDou. The BOC(1,1) and BOC(10,5) are adopted by GPS and BeiDou navigation signals. In this paper, two kinds of OFDM-modulated navigation signals are selected, OFDM(8) and OFDM(128). The number of OFDM(8) subcarriers is 8, subcarrier spacing is 2.4 MHz, cyclic prefix mode is adopted, and cyclic prefix length is ; for OFDM(128), the number of carriers is 128, subcarrier spacing is 0.15 MHz, and remaining parameters are similar to OFDM(8).
Figure 9 shows the ACF and PSD of several different types of navigation signals and analyzes the characteristics of these types of navigation signals. Figure 9a shows that the main peak of the ACF of the OFDM navigation signal is the same as that of the BOC(10,5). The main peak is relatively narrow and has a higher tracking accuracy of the code loop. In contrast to the BOC(10,5), the OFDM-modulated navigation signal’s secondary peaks near the main peak of the ACF are effectively suppressed, and the amplitude of the secondary peaks is significantly improved compared with the BOC(10,5). The code loop tracking loop locking is more accurate and false locks are not prone to occur. There is no need to adopt the algorithm of unambiguous tracking, which helps to eliminate the problem of the mislocking of the main peak of the BOC signal receiver and reduces the complexity of the receiver design. In Figure 9b, when comparing the OFDM-modulated navigation signal with the BOC signal, it can be found that the main lobe area of the OFDM navigation signal is basically flat, showing the form of a band-pass white noise PSD function, and the power is evenly distributed to the main board. The PSD curve amplitude is low. These characteristics make the OFDM navigation signal not only have a strong anti-interference ability, but also make it easy to integrate with other signals. Compared with the OFDM modulation, the power spectral density of the BOC signal and BPSK signal is composed of multiple PSD peaks. The position of the main lobe is relatively scattered in the spectrum range and the energy is not concentrated, which can easily cause interference with other signals.
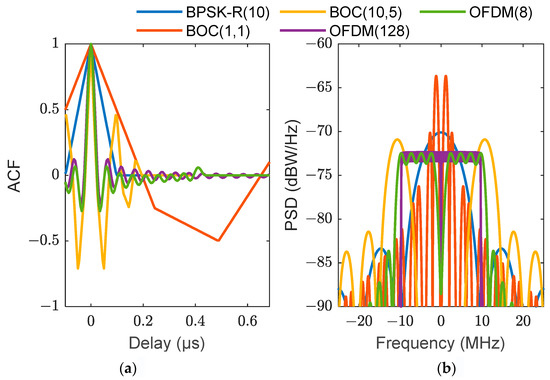
Figure 9.
Comparison between the navigation signal and traditional signal. (a) ACF; (b) PSD.
In summary, the OFDM navigation signal has a better tracking accuracy of the code loop, and the tracking of the code loop is stable, therefore there is no need to consider the unambiguous tracking. The power of the signal can also be evenly distributed in the range of the frequency spectrum, so the OFDM navigation signals have a good navigation performance.
5. Performance Evaluation of OFDM Navigation Signals
In the previous sections, we introduced the time domain model of the signal and analyzed the characteristics of the OFDM navigation signal, comprehensively analyzed the spectrum usage of different navigation signals, and qualitatively analyzed the tracking accuracy, code loop false lock probability, anti-jamming, etc. In this section, we quantitatively analyze the reception performance of the OFDM navigation signals and prove the superiority of OFDM navigation signals.
5.1. Capture Time
In the integrated receiver, the navigation processing module is generally in two states: the acquisition state and tracking state. The acquisition state provides the initial Doppler shift and pseudo-code phase difference for the tracking state. The size of the indefinite interval in a two-dimensional search for a signal basically determines the time required to complete the search for the signal. The average capture time A of the signal can be calculated by using the following formula:
In the formula, and represent the Doppler indeterminate interval and the code phase indefinite interval, respectively. and represent the Doppler search frequency band and code phase bandwidth, respectively. The dwell time is the average search time for a unit. The traditional BOC modulation algorithm can capture the OFDM navigation signal with only minor changes. Because the ACF sub-peak-to-peak value of the OFDM navigation signal is lower, the false acquisition probability of the OFDM navigation signal is lower than that of the BOC signal.
5.2. Tracking Accuracy
The tracking accuracy of the code loop directly reflects the tracking performance of the navigation signal and is the most important indicator for the measurement of the navigation signal [28]. In this section, the theoretical tracking lower bound of the code loop is first analyzed, which determines the highest tracking ability of the code loop and provides a theoretical basis for the optimization of the receiver code loop. Then, the non-coherent delay-lag loop (NELP) is simulated. The tracking performance of the incoherent delay-lag loop is not affected by the jump of the navigation message, therefore the integration time of the navigation signal can be increased, and the gain of the navigation signal can be improved. The incoherent lead–lag code loop tracking error is the mean square root of the code tracking loop error. In this section, the bandwidth of the receiver is set to 36 MHz, noise bandwidth of the code loop is 0.1 Hz, integration time is 20 ms, interval between the leading branch and lagging branch is 20 ns, and variation range of the carrier-to-noise ratio CN0 is 20–40. An analysis of Figure 10 shows that with the improvement of the carrier-to-noise ratio of the navigation signal, the code loop tracking lower bound and the NELP tracking error both significantly decrease. The tracking performances of the proposed navigation signal OFDM(128) and OFDM(8) are significantly better than BPSK-R(10) and BOC(1,1); the tracking performance of the navigation signal OFDM(128) and OFDM(8) is slightly lower than that of BOC(10,5), but there is an improvement to the carrier-to-noise ratio, and the tracking performance is similar. When the carrier-to-noise ratio CN0 is 20 dB, the theoretical tracking accuracy of the OFDM(8) code loop is improved by 56% compared with BOC(1,1), and the tracking accuracy of OFDM(128) is improved by 46% compared with BOC(1,1). The code loop tracking accuracy is significantly improved. By comparing the code loop tracking accuracy lower bound with the NELP tracking error, it can be found that the NELP tracking error is slightly larger than the code loop theoretical tracking’s lower bound, but close in value. Using this set of code loop parameters, a better tracking accuracy can be obtained. When the carrier-to-noise ratio CN0 is 40 dB, the accuracy of the OFDM-modulated navigation signal is about 0.04 m.
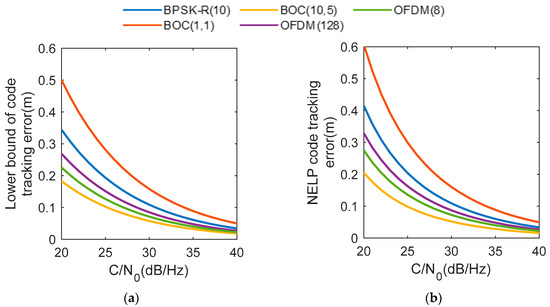
Figure 10.
Comparison between the navigation signal and traditional signal. (a) Lower bound of code ring tracking accuracy; (b) Incoherent lead–lag code loop tracking error.
5.3. Receive Bandwidth
For the GNSS receivers, the bandwidth selection of the receiver has a great impact on the navigation performance. In order to ensure the tracking performance of the navigation signals, the RF front end of the general receiver should contain at least 90% power [29]. Figure 11 shows the power ratio versus the RF front-end bandwidth. For BOC(1,1), the RF front-end bandwidth at a 90% power ratio is the smallest, about 8 MHz. The RF front-end bandwidth at the same power ratio in OFDM(128) and OFDM(8) is 14 MHz and 16 MHz, respectively, which is slightly larger than the 8 MHz and 12 MHz of BOC(1,1) and BPSK-R(10), respectively; it is much smaller than the 50 MHz of BOC(10,5), so the RF front-end bandwidth of 36 MHz cannot fully receive the signal power of BOC(10,5). Based on the above analysis, it can be concluded that BOC(10,5) requires a large bandwidth to achieve a high accuracy, while the OFDM-modulated navigation signals only require a small bandwidth to achieve a relatively high accuracy.
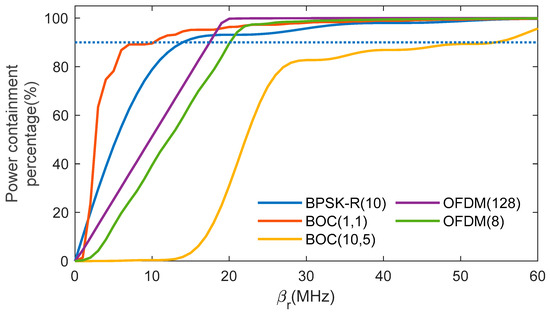
Figure 11.
Relationship between the power ratio and bandwidth. The blue dash line is 90% power containment.
5.4. Modulation Parameter Analysis
Figure 12 shows the S-curves of several navigation signal code loops when the receiver bandwidth is 36 MHz and the time delay between the immediate branch and the delay branch is 20 ns. According to the S-curve, we can analyze the ranging performance of the navigation signal. The steeper the curve between the two main peaks, the higher the ranging accuracy; the lower the other side peaks, the lower the probability of false lock. We find that the curve between the two main peaks of OFDM(128) is the steepest, thus it has the highest code loop phase resolution and the highest ranging accuracy. Although the curve between the two main peaks of BOC(10,5) is relatively steep, there are many secondary peaks with similar peaks on both sides of the main peak, which make false lock of the code tracking loop. Therefore, the OFDM(128) modulation has a high ranging accuracy and low probability of false locks, and is a relatively good modulation method.
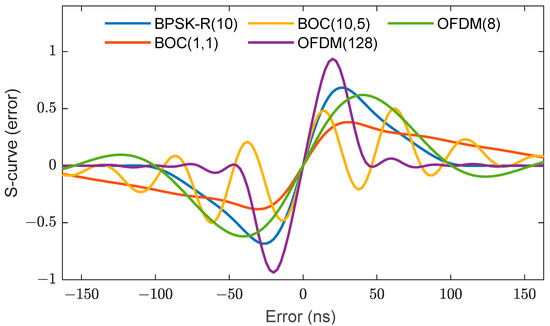
Figure 12.
Code tracking ring S-curve.
5.5. Anti Interference Ability
5.5.1. Spectral Separation Coefficients
The spectral separation coefficient (SSC) measures the interference caused by unintended signals and can reflect the compatibility between different signals [30]. Table 1 shows the SSCs of several different navigation signals when the bandwidth of the receiver is 36 MHz. The SSCs between two identical signals represents intra-system interference, and SSCs between different signals represents the interference between different systems. We find that by selecting the appropriate parameters, the OFDM navigation signal and the existing navigation signal have a smaller SSC, and the SSC is below −73 dB, therefore it has better spectrum isolation and lower interference to the existing navigation signal.

Table 1.
The SSCs of several navigation signals.
5.5.2. Narrowband Interference
DSSS technology can bring a spread spectrum gain to the navigation signal, and the spread spectrum gain can reflect the anti-interference ability of the navigation signal. Figure 13 shows the equivalent carrier-to-noise ratio of the narrowband interference to the navigation signal. The receiver bandwidth is 36 MHz and the CN0 is 45 dB. The narrowband interference bandwidth is 1 MHz, and the narrowband interference is located at the center of the main lobe of the navigation signal. Because OFDM(128) and OFDM(8) have the same spreading gain, their equivalent carrier-to-noise ratios are the same. Under the influence of the same narrowband noise, we find that the carrier-to-noise ratio of the OFDM-modulated navigation signal is about 5 dB higher than that of BOC(10,5) and BPSK-R(10). Therefore, OFDM modulation has a strong ability to resist narrowband interference.
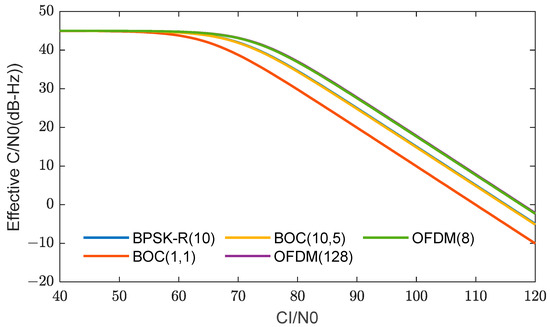
Figure 13.
The equivalent carrier-to-noise ratio.
5.5.3. Multipath Interference
Multipath interference is a major interference signal for GNSS receivers. In this section, we consider a simple multipath interference scenario. There are two paths in the transmission channel: a direct path and a reflection path. The power of the reflection path is 3 dB lower than that of the direct path. The lead–lag interval is 10 ns, and the receiver bandwidth is selected to be 36 MHz. Figure 14 shows the relationship between the multipath envelope error of the NELP code tracking loop and the average error of the multipath envelope. When the multipath delay is within 15 m, the multipath error of the OFDM modulated navigation signal is relatively large, but when the multipath delay is greater than 15 m, the multipath error of the OFDM navigation signal is small. It can be seen from the figure that the multipath error of OFDM(8) is better than that of OFDM(128). After analysis, it can be found that the main reason is that the subcarrier spacing of OFDM(8) is 2.4 MHz, while the subcarrier spacing of OFDM(128) is 0.15 MHz. A wider subcarrier spacing can effectively improve the multipath error. By analyzing the communication signal, the guard interval of the OFDM has a strong anti-multipath ability. Therefore, in follow-up research, the anti-multipath ability of the navigation signal can be enhanced through the modification and design of the receiver and through the use of the cyclic prefix.
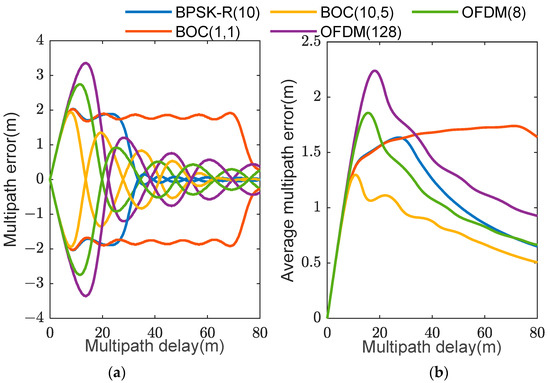
Figure 14.
Multipath error of the navigation signal. (a) Multipath envelope error; (b) Multipath envelope average error.
5.6. Communication Performance Analysis
In this paper, when realizing the fusion of the communication and navigation signals, the selected communication signal also adopts the OFDM modulation method. The OFDM navigation signal and the OFDM communication signal are superimposed in the time domain, and the power ratio of the communication signal and the navigation signal is controlled at 20–30 dB. The sequence spread spectrum technology demodulates the navigation signal that is submerged in the communication signal to realize the communication and navigation functions.
The following section focuses on analyzing the change in the bit error rate with the bit signal-to-noise ratio in the communication signal when under the influence of the navigation signal. In the simulation, the parameters of the navigation signal and OFDM(128) are the same, where the subcarrier spacing is 0.15 MHz, number of carriers is 128, and cyclic prefix length is 12 dB, and the simulation result of the bit error rate of the communication signal is shown in Figure 15. When the conduction power ratio is 20 dB, it can be found that the influence of OFDM(128) is slightly smaller than that of BOC(1,1) on the bit error rate of the communication signal. When the bit signal-to-noise ratio is 10 dB, it can be found that the bit error rate caused by BOC(1,1) is significantly higher than OFDM(128), indicating that when the EbN0 is large, the bit error rate is mainly caused by BOC(1,1), and it indicates that BOC(1,1) has a greater impact on the communication signal. When comparing the bit error rate caused by OFDM(128) to the communication signal under the conditions of 20 dB and 10 dB conduction power ratios, respectively, the difference between the two is very small. This indicates that when the conduction signal power value is changed from 20 dB to 10 dB, the change in communication bit error rate is small, and the influence of the OFDM navigation signal on the bit error rate of the OFDM communication signal is very small with respect to the change of the power ratio of the conduction signal. Therefore, the OFDM navigation modulation proposed in this paper can be used as the superimposed signal of the communication signal to integrate communication and navigation at the signal level.
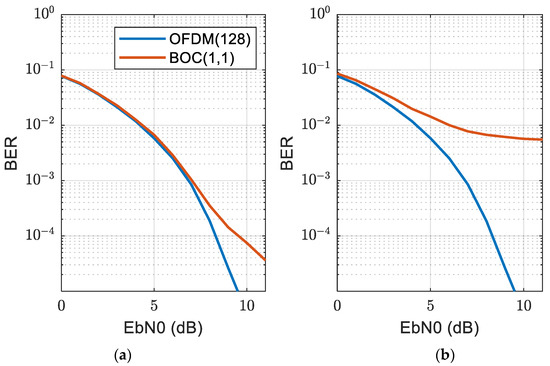
Figure 15.
Bit error rate of the communication signal varies with the signal-to-noise ratio. (a) When the power ratio of communication and navigation signals is 20 dB; (b) When the power ratio of communication and navigation signals is 10 dB.
6. Conclusions
In this paper, a new navigation modulation is proposed that is based on OFDM modulation. We proposed a mathematical model of an OFDM navigation signal with a guard interval according to the classical OFDM communication signal. The ACF and PSD expressions of OFDM navigation signal were derived, and the correctness of the analytical expressions is verified through simulation. We discussed the influence of the OFDM modulation parameters on the ACF and PSD, which helps navigation signal designers choose the appropriate OFDM parameters. Through the simulation analysis of the OFDM navigation signals and other typical navigation signals, the results show that OFDM navigation signals not only have a high tracking accuracy and strong anti-interference ability, but also form a very low bit error rate for communication signals in the pass-through integration, showing a good pass-through compatibility.
Although the modulation system of the OFDM navigation signal was designed and its performance was comprehensively analyzed in this paper, the research on the design of the OFDM navigation signal receiver is not in-depth. The next step is to study the design of the receiver based on the OFDM navigation signal and to make full use of the characteristics of the cyclic prefix in the modulation process of the OFDM. The frequency synchronization plays an important role in the OFDM receiver, and we will study frequency synchronization in OFDM navigation modulation in a future work.
The integration of an OFDM navigation signal and OFDM communication signal can greatly enhance the indoor positioning ability of a navigation signal, improve the ability of a GNSS service, and meet more user needs. The research results of this paper provide a feasible reference scheme for the design and optimization of a GNSS signal system. The fusion of an OFDM navigation signal and OFDM communication signal can make full use of existing wireless communication base stations to play the navigation signal with a low upgrade cost and wide navigation coverage; this provides a solution to the problem of high-precision indoor positioning.
Author Contributions
Y.Y. and X.W. conceived the conceptualization and algorithm. X.W. completed the implementation of the algorithm, the writing of the paper, and supported the writing—review and editing. L.D. completed some preliminary simulations and performed the preliminary research and summary. L.Y. and Z.L. reviewed the experimental results and gave formal analysis and suggestions. Y.X. and W.D. provided suggestions in the revision of the paper. All authors have read and agreed to the published version of the manuscript.
Funding
Funding was supported by the National Key Research and Development Program of China (Grant No. 2017YFC1500904 and 2016YFB0501301) and National 973 Program of China (Grant No. 613237201506).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Deng, Z.; Wang, H.; Liu, J. Status and Trend of Communication-Navigation Intergrated Positioning Technology. Navig. Position. Timing 2022, 2, 15–25. [Google Scholar] [CrossRef]
- Li, D.R. On the intergrated airspace information real-time intelligent service system of communication, navigation and remote integration with deep military civilian integration. Civ.-Mil. Integr. Cyberspace 2018, 12, 12–15. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Witrisal, K.; Hinteregger, S.; Kulmer, J.; Leitinger, E.; Meissner, P. High-accuracy Positioning for Indoor Applications: RFID, UWB, 5G, and beyond. In Proceedings of the IEEE International Conference on Rfid, Orlando, FL, USA, 3–5 May 2016. [Google Scholar]
- Ye, L.; Yang, Y.; Jing, X.; Ma, J.; Deng, L.; Li, H. Single-Satellite Integrated Navigation Algorithm Based on Broadband LEO Constellation Communication Links. Remote Sens. 2021, 13, 703. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Altimeter + INS/Giant LEO Constellation Dual-Satellite Integrated Navigation and Positioning Algorithm Based on Similar Ellipsoid Model and UKF. Remote Sens. 2021, 13, 4099. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation. Remote Sens. 2021, 13, 3312. [Google Scholar] [CrossRef]
- Ye, L.; Gao, N.; Yang, Y.; Li, X. A High-Precision and Low-Cost Broadband LEO 3-Satellite Alternate Switching Ranging/INS Integrated Navigation and Positioning Algorithm. Drones 2022, 6, 241. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, L.; Li, J.; Yang, Y.; Zhang, T.; Mao, Y.; Sun, B.; Ren, X. Featured services and performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar] [CrossRef]
- Chang, R.W. Synthesis of Band-Limited Orthogonal Signals for Multichannel Data Transmission. Bell Labs Technol. J. 1966, 45, 1775–1796. [Google Scholar] [CrossRef]
- Chang, R.W.; Gibby, R.A. A Theoretical Study of Performance of an Orthogonal Multiplexing Data Transmission Scheme. IEEE Trans. Commun. Technol. 1968, 16, 529–540. [Google Scholar] [CrossRef]
- Chang, R.W. Orthogonal Frequency Multiplex Data Transmission System. U.S. Patent 3,488,445, 6 January 1970. [Google Scholar]
- Weinstein, S.; Ebert, P. Bell Telephone Labs. Holmdel, NJ. IEEE Trans. Commun. Technol. 1971, 19, 628–634. [Google Scholar] [CrossRef]
- Cimini, L., Jr. Analysis and simulation of digital mobile channel using orthogonal frequency division multiplexing. IEEE Trans. Commun. 1985, 42, 665–675. [Google Scholar] [CrossRef]
- Sen, S.; Nehorai, A. Adaptive design of OFDM radar signal with improved wideband ambiguity function. IEEE Trans. Signal Process. 2010, 58, 928–933. [Google Scholar] [CrossRef]
- Mohseni, R.; Sheikhi, A.; Masnadi-Shirazi, M.A. Multicarrier constant envelope OFDM signal design for radar applications. AEU-Int. J. Electron. Commun. 2010, 64, 999–1008. [Google Scholar] [CrossRef]
- Kim, H.; Jung, I.; Park, Y.; Chung, W.; Choi, S.; Hong, D. Time Spread-Windowed OFDM for Spectral Efficiency Improvement. IEEE Wirel. Commun. Lett. 2018, 7, 696–699. [Google Scholar] [CrossRef]
- Vahid, K.; Reza, M.; Sadegh, S. Adaptive OFDM Waveform Design for Cognitive Radar in Signal-Dependent Clutter. IEEE Syst. J. 2020, 14, 3630–3640. [Google Scholar] [CrossRef]
- Deng, Z.; Yu, Y.; Yuan, X. Situation and development tendency of indoor positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Liu, J. Frequency Domain Composite OFDM Modulation Method for Communication and Navigation Integrated Signal. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2019. [Google Scholar]
- Xu, X.X. Joint Waveform Design of Communication and Navigation and the Optimization of Receive Method. Master’s Thesis, Zhejiang University, Hangzhou, China, 2020. [Google Scholar]
- Ji, J.; Liu, Y.; Chen, W.; Wu, D.; Lu, H.; Zhang, J. A Novel Signal Design and Performance Analysis in NavCom Based on LEO Constellation. Sensors 2021, 21, 8235. [Google Scholar] [CrossRef] [PubMed]
- Lan, X.; Zhang, M.; Li, X. OFDM Chirp Waveform Design Based on Subchirp Bandwidth Overlap and Segmented Transmitting for Low Correlation Interference in MIMO Radar. Sensors 2019, 19, 2696. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Yang, Y.; Li, H.; Li, J. FH-BOC: Generalized low-ambiguity anti-interference spread spectrum modulation based on frequency-hopping binary offset carrier. GPS Solut. 2020, 24, 70. [Google Scholar] [CrossRef]
- Xue, L.; Li, X.; Wu, W.; Dong, J. Multifunctional Signal Design for Measurement, Navigation and Communication Based on BOC and BPSK Modulation. Remote Sens. 2022, 14, 1653. [Google Scholar] [CrossRef]
- Dwivedi, A.; Pathak, A. Analysis of different lenght of sub channels and different order of modulation on the basis of bit error in OFDM system. Int. J. Adv. Res. Sci. Technol. 2016, 5, 150–158. [Google Scholar]
- Xie, G. Principle of GNSS: GPA, GLONASS, and Galileo; Publishing House of Electronics Industry: Beijing, China, 2013. [Google Scholar]
- Ye, L.; Fan, Z.; Zhang, H.; Liu, Y.; Wu, W.; Hu, Y. Analysis of GNSS Signal Code Tracking Accuracy under Gauss Interference. Comput. Sci. 2020, 47, 245–251. [Google Scholar]
- Betz, J.W. Binary Offset Carrier Modulations for Radionavigation. Navigation 2001, 48, 227–246. [Google Scholar] [CrossRef]
- Betz, J.W.; Kolodziejski, K.R. Generalized Theory of Code Tracking with an Early-Late Discriminator Part II: Noncoherent Processing and Numerical Results. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1538–1556. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).