
The Effect of Non-Circular Bearing Shapes in Hydrodynamic Journal Bearings on the Vibration Behavior of Turbocharger Structures


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling Methods
2.1. Rotordynamic Model for Efficient Run-Up Simulations in HOTINT
2.2. Element and Model Description
2.3. Equations of Motion and Time Integration
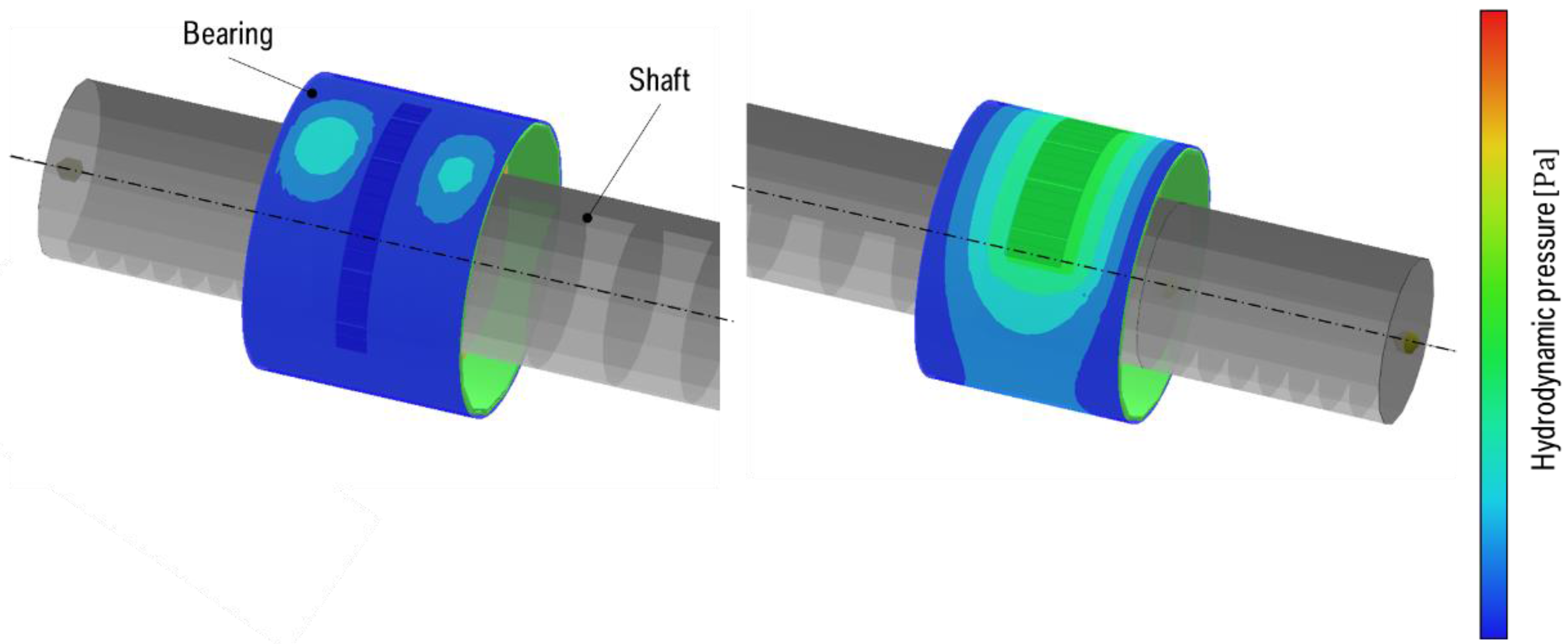
2.4. Hydrodynamic Bearing Elements with Finite Length and Non-Circular Geometry
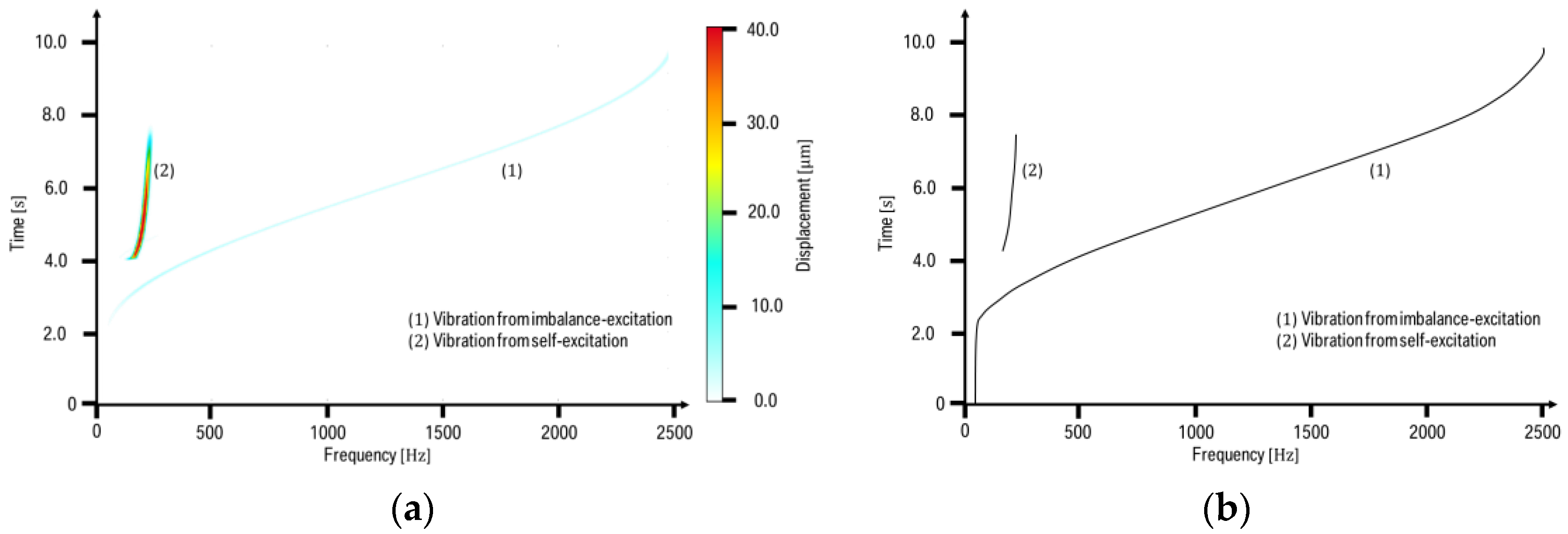
2.5. Post Processing Methods
3. Results
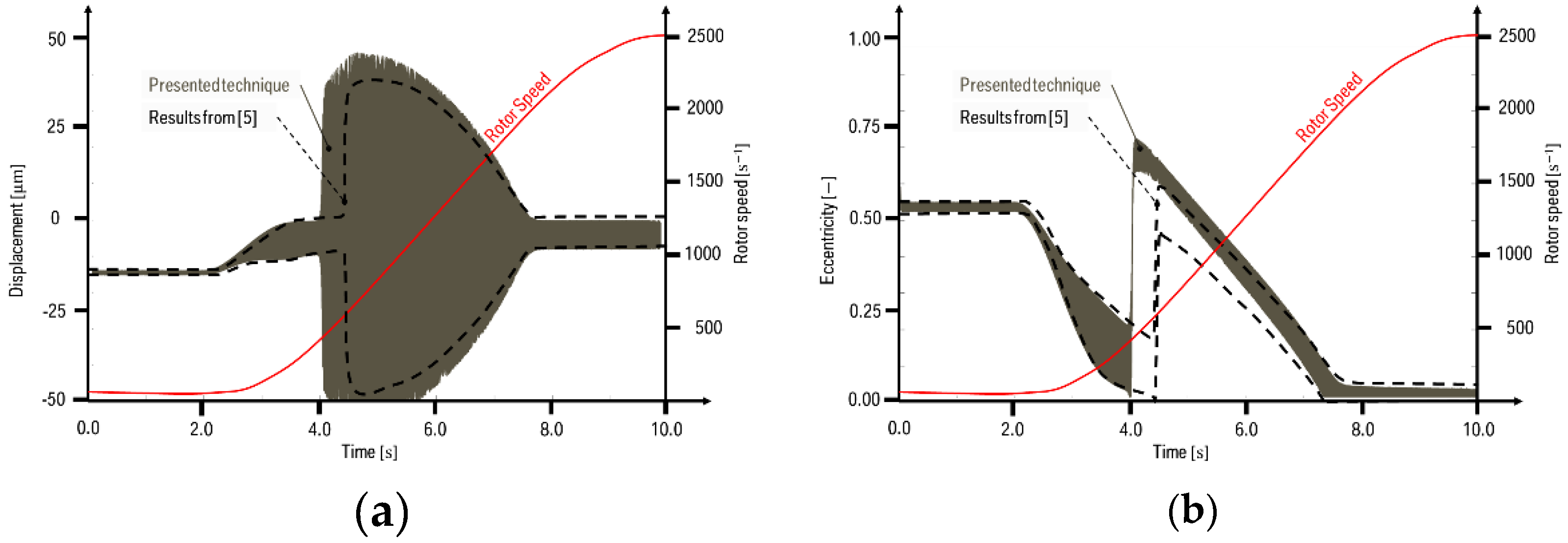
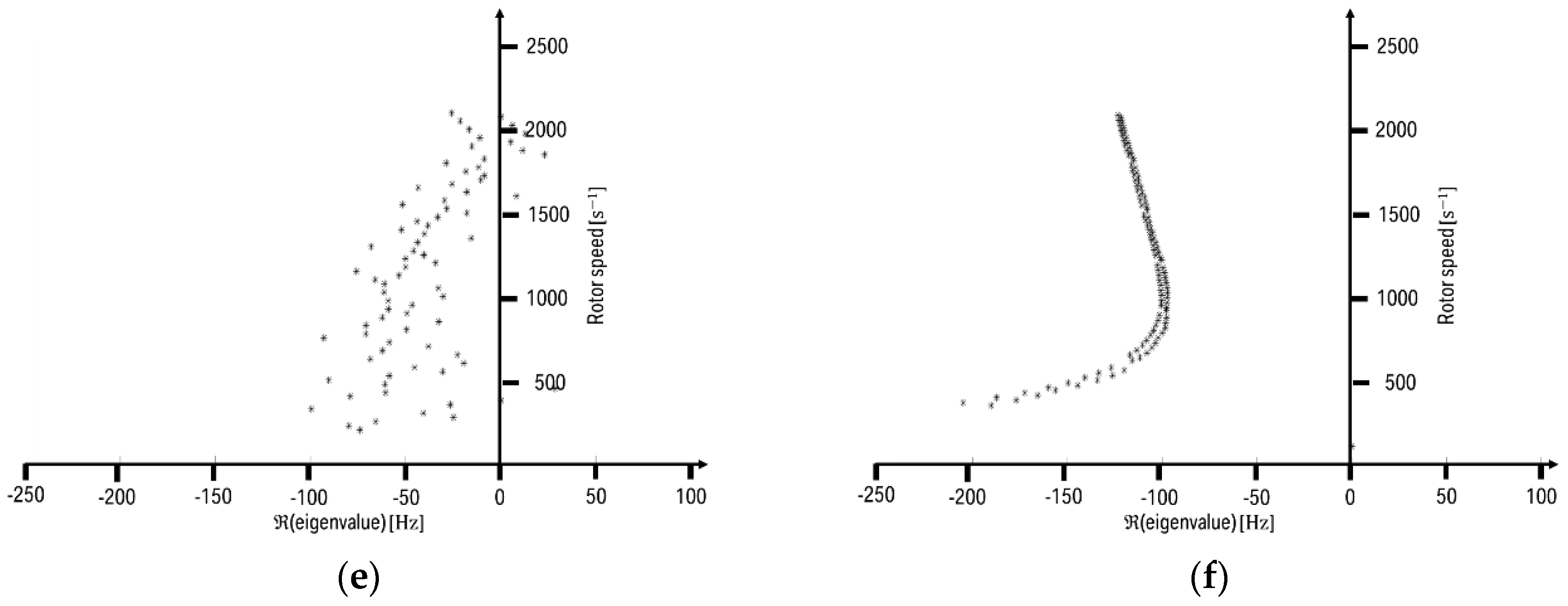
3.1. Customized Laval/Jeffcott-Rotor in Plain Hydrodynamic Bearings
3.2. Reduced Turbocharger Model with Floating-Bearing Rings
4. Conclusions and Outlook
Author Contributions
Conflicts of Interest
Appendix A
Appendix A.1. Model Data of Customized Laval/Jeffcott-Rotor in Plain Hydrodynamic Bearings
Appendix A.2. Model Data of Turbocharger Model with Floating Bearing Rings
References
- Bernhauser, L.; Steinwender, L.; Irschik, H. Designing a Metric for the Customer Relevance of Synchronous Turbocharger Whistling in the Driver’ s Cabin. In Proceedings of the Inter-Noise 2016, Hamburg, Germany, 21–24 August 2016.
- Boyaci, A.; Lu, D.; Schweizer, B. Stability and bifurcation phenomena of Laval/Jeffcott rotors in semi-floating ring bearings. Nonlinear Dyn. 2015, 79, 1535–1561. [Google Scholar] [CrossRef]
- Nguyen-Schäfer, H. Rotordynamics of Automotive Turbochargers; Springer-Verlag: Berlin, Germany, 2012. [Google Scholar]
- Nguyen-Schäfer, H. Aero and Vibroacoustics of Automotive Turbochargers; Springer-Verlag: Berlin, Germany, 2013. [Google Scholar]
- Schweizer, B. Oil whirl, oil whip and whirl/whip synchronization occurring in rotor systems with full-floating ring bearings. Nonlinear Dyn. 2009, 57, 509–532. [Google Scholar] [CrossRef]
- Schweizer, B. Total instability of turbocharger rotors-Physical explanation of the dynamic failure of rotors with full-floating ring bearings. J. Sound Vib. 2009, 328, 156–190. [Google Scholar] [CrossRef]
- Bernhauser, L.; Steinwender, L.; Neumayer, R.; Schörgenhumer, M.; Nader, M. Efficient Transient Run-up Simulations for the Investigation of Acoustically Relevant Vibrations of Turbocharger Structures with Floating-Ring Bearings. In Proceedings of the DAGA 2016—Jahrestagung für Akustik, Aachen, Germany, 14–17 March 2016.
- Nishida, H.; Kamata, K.; Tomita, I.; Shiraishi, T.; Hayashi, N.; Ebisu, M.; Suzuki, H.; Ogita, H. Turbocharger and Method of Manufacturing Floating Bush. U.S. Patent 20140010647 A1, 9 January 2014. [Google Scholar]
- Aktiengesellschaft Kühnle, K. Lagerung eines Abgasturboladers. Patent DE3936069 A1, 2 May 1991. [Google Scholar]
- Eling, R.; van Ostayen, R.; Rixen, D. Multilobe Floating Ring Bearings for Automotive Turbochargers. In Proceedings of the 9th IFToMM International Conference on Rotor Dynamics, Mechanisms and Machine Science, Milan, Italy, 22–25 September 2014; Volume 21, pp. 1103–1113.
- Gerstmayr, J.; Al, E. HOTINT—A Script Language Based Framework for the Simulation of Multibody Dynamics Systems. In Proceedings of the ASME 2013 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE, Portland, OR, USA, 4–7 August 2013.
- Gerstmayr, J.; Stangl, M. High-Order Implicit Runge—Kutta Methods for Discontinuous Mechatronical Systems. In Proceedings of the 32nd Summer School APM, Saint Petersburg, Russia, 2004; pp. 1–13.
- Dresig, H.; Holzweißig, F. Maschinendynamik; Springer-Verlag: Berlin, Germany, 2016. [Google Scholar]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations I (II); Springer-Verlag: Berlin, Germany, 1991. [Google Scholar]
- Lang, R.; Steinhilper, W. Hydrodynamische Schmierung und hydrodynamische Lager. In Gleitlager. Berechnung und Konstruktion von Gleitlagern mit konstanter und Zeitlich Veränderlicher Belastung; Springer-Verlag: Berlin, Germany, 1978. [Google Scholar]
- Krämer, E. Dynamics of Rotors and Foundations; Springer-Verlag: Berlin, Germany, 1993. [Google Scholar]
- Meister, A. Numerik Linearer Gleichungssysteme; Vieweg + Teubner Verlag: Wiesbaden, Germany, 2008. [Google Scholar]
- The MathWorks Inc. MATLAB, version 8.6.0 (R2015b); The MathWorks Inc.: Natick, MA, USA, 2015. [Google Scholar]
- Jeffcott, H.H. The Lateral Vibration of Loaded Shafts in the Neighbourhood of a Whirling Speed—The Effect of Want of Balance. Philos. Mag. 1919, 37, 304–314. [Google Scholar] [CrossRef]
- Leonetti, M. Experimental investigation of operating parameters on constant-tone-noise of turbochargers. In Proceedings of the Internationales Stuttgarter Symposium 2016, Wiesbaden, Germany, 2016; pp. 687–705.
- Nguyen-Schäfer, H. Nonlinear Rotordynamic Computations of Automotive Turbochargers Using Rotating Floating Ring Bearings at High Rotor Speeds. In Proceedings of SIRM 2013—10th International Conference on Vibrations in Rotating Machines, Berlin, Germany, 25–27 February 2013.
- Koutsovasilis, P. Mode shape degeneration in linear rotor dynamics for turbocharger systems. Arch. Appl. Mech. 2017, 87, 575–592. [Google Scholar] [CrossRef]
- Koutsovasilis, P.; Driot, N. Turbocharger rotors with oil-film bearings: Sensitivity and optimization analysis in virtual prototyping. In Proceedings of the 11th International Conference on Vibrations in Rotating Machines, Wiesbaden, Germany, 23–25 Februray 2015.
- Deng, D.; Shi, F.; Begin, L.; Du, I. The Effect of Oil Debris in Turbocharger Journal Bearings on Subsynchronous NVH. SAE Tech. Pap. 2015. [Google Scholar] [CrossRef]
- Nowald, G.; Boyaci, A.; Schmoll, R.; Koutsovasilis, P.; Driot, N.; Schweizer, B. Influence of Circumferential Grooves on the Non-Linear Oscillations of Turbocharger Rotors in Floating Ring Bearings. In Proceedings of the 14th IFToMM World Congress, Taipei, Taiwan, 25–30 October 2015; pp. 1–8.
- Koutsovasilis, P.; Driot, N.; Lu, D.; Schweizer, B. Quantification of sub-synchronous vibrations for turbocharger rotors with full-floating ring bearings. Arch. Appl. Mech. 2015, 85, 481–502. [Google Scholar] [CrossRef]
- Leonetti, M.; Bargende, M.; Kreschel, M.; Meier, C.; Schulze, H. An Investigation of Sub-Synchronous Oscillations in Exhaust Gas Turbochargers. SAE Tech. Pap. 2015. [Google Scholar] [CrossRef]
- Nguyen-Schäfer, T.-H. Exhaust Gas Turbocharger with Plain Bearing for Reducing Fluid Turbulence. Patent EP 2576996 B1, 15 July 2015. [Google Scholar]
- Goenka, P.K. Dynamically Loaded Journal Bearings: Finite Element Method Analysis. J. Tribol. 1984, 106, 429. [Google Scholar] [CrossRef]
- Magnus, K.; Popp, K.; Walter, S. Schwingungen—Eine Einführung in die Physikalischen Grundlagen und die Theoretische Behandlung von Schwingungsproblemen; Vieweg + Teubner Verlag: Wiesbaden, Germany, 2008; Volume 8. [Google Scholar]
- Amamou, A.; Chouchane, M. Nonlinear stability analysis of long hydrodynamic journal bearings using numerical continuation. Mech. Mach. Theory 2014, 72, 17–24. [Google Scholar] [CrossRef]
- Boyaci, A.; Hetzler, H.; Seemann, W.; Proppe, C.; Wauer, J. Analytical bifurcation analysis of a rotor supported by floating ring bearings. Nonlinear Dyn. 2009, 57, 497–507. [Google Scholar] [CrossRef]
- Chouchane, M.; Amamou, A. Bifurcation of limit cycles in fluid film bearings. Int. J. Non Linear Mech. 2011, 46, 1258–1264. [Google Scholar] [CrossRef]
- Allmaiera, H.; Priestnera, C.; Reicha, F.M.; Priebscha, H.H.; Forstnerb, C.; Novotny-Farkasc, F. Predicting friction reliably and accurately in journal bearings—The importance of extensive oil-models. Tribol. Int. 2012, 48, 93–101. [Google Scholar] [CrossRef]
- Sander, D.E.; Allmaier, H.; Priebsch, H.H.; Reich, F.M.; Witt, M.; Füllenbach, T.; Skiadas, A.; Brouwer, L.; Schwarze, H. Impact of high pressure and shear thinning on journal bearing friction. Tribol. Int. 2015, 81, 29–37. [Google Scholar] [CrossRef]
- Fryščok, T.; Zatko, M. Subsynchronous frequency of a turbocharger rotor. J. Middle Eur. Constr. Des. Cars 2013, 11, 1–4. [Google Scholar] [CrossRef]
- Schweizer, B.; Sievert, M. Nonlinear oscillations of automotive turbocharger turbines. J. Sound Vib. 2009, 321, 955–975. [Google Scholar] [CrossRef]
- Alsaeed, A.A. A Study of Methods for Improving the Dynamic Stability of High-Speed Turbochargers. Ph.D. Thesis, Virginia Polytechnic and State University, Blacksburg, VA, USA, 2010. [Google Scholar]
- Boyaci, A.; Schweizer, B. Nonlinear oscillations of high-speed rotor systems in semi-floating ring bearings. In Proceedings of the 9th IFToMM International Conference on Rotor Dynamics, Milan, Italy, 22–25 September 2014; Volume 21, pp. 845–854.





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernhauser, L.; Heinisch, M.; Schörgenhumer, M.; Nader, M. The Effect of Non-Circular Bearing Shapes in Hydrodynamic Journal Bearings on the Vibration Behavior of Turbocharger Structures. Lubricants 2017, 5, 6. https://doi.org/10.3390/lubricants5010006
Bernhauser L, Heinisch M, Schörgenhumer M, Nader M. The Effect of Non-Circular Bearing Shapes in Hydrodynamic Journal Bearings on the Vibration Behavior of Turbocharger Structures. Lubricants. 2017; 5(1):6. https://doi.org/10.3390/lubricants5010006
Chicago/Turabian StyleBernhauser, Lukas, Martin Heinisch, Markus Schörgenhumer, and Manfred Nader. 2017. "The Effect of Non-Circular Bearing Shapes in Hydrodynamic Journal Bearings on the Vibration Behavior of Turbocharger Structures" Lubricants 5, no. 1: 6. https://doi.org/10.3390/lubricants5010006
APA StyleBernhauser, L., Heinisch, M., Schörgenhumer, M., & Nader, M. (2017). The Effect of Non-Circular Bearing Shapes in Hydrodynamic Journal Bearings on the Vibration Behavior of Turbocharger Structures. Lubricants, 5(1), 6. https://doi.org/10.3390/lubricants5010006