Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments

Abstract
:1. Introduction
2. Mathematical Model
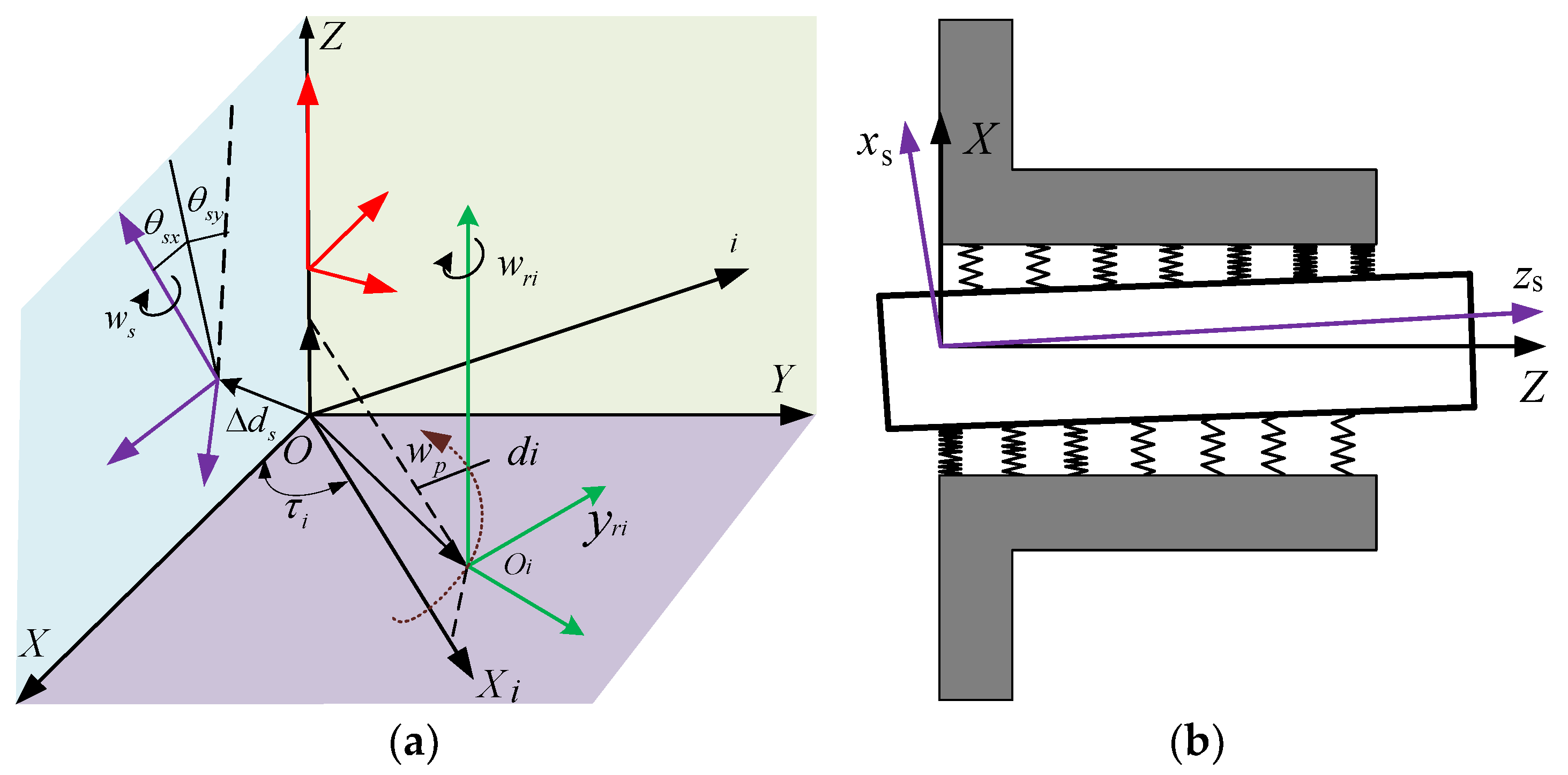
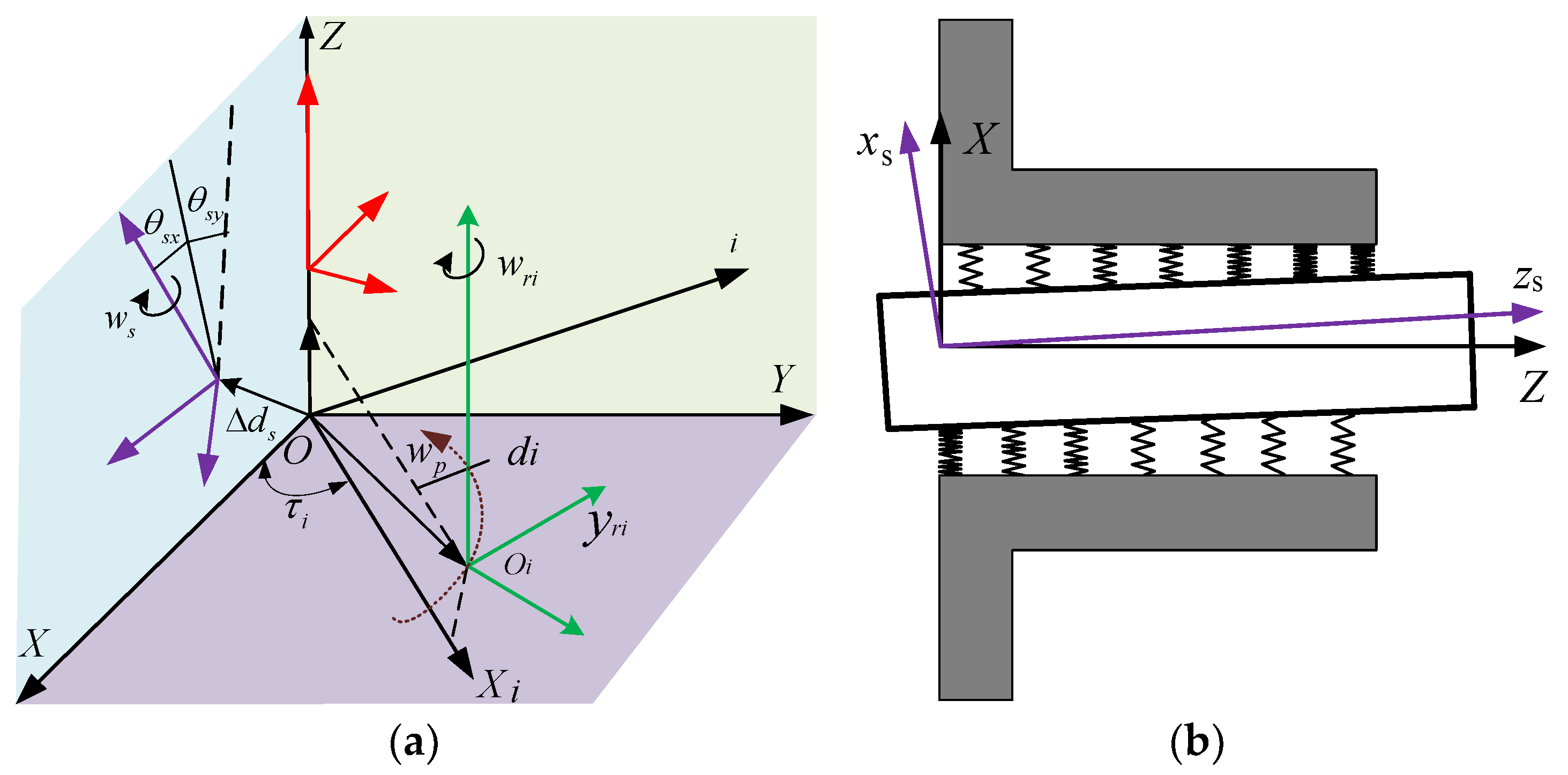
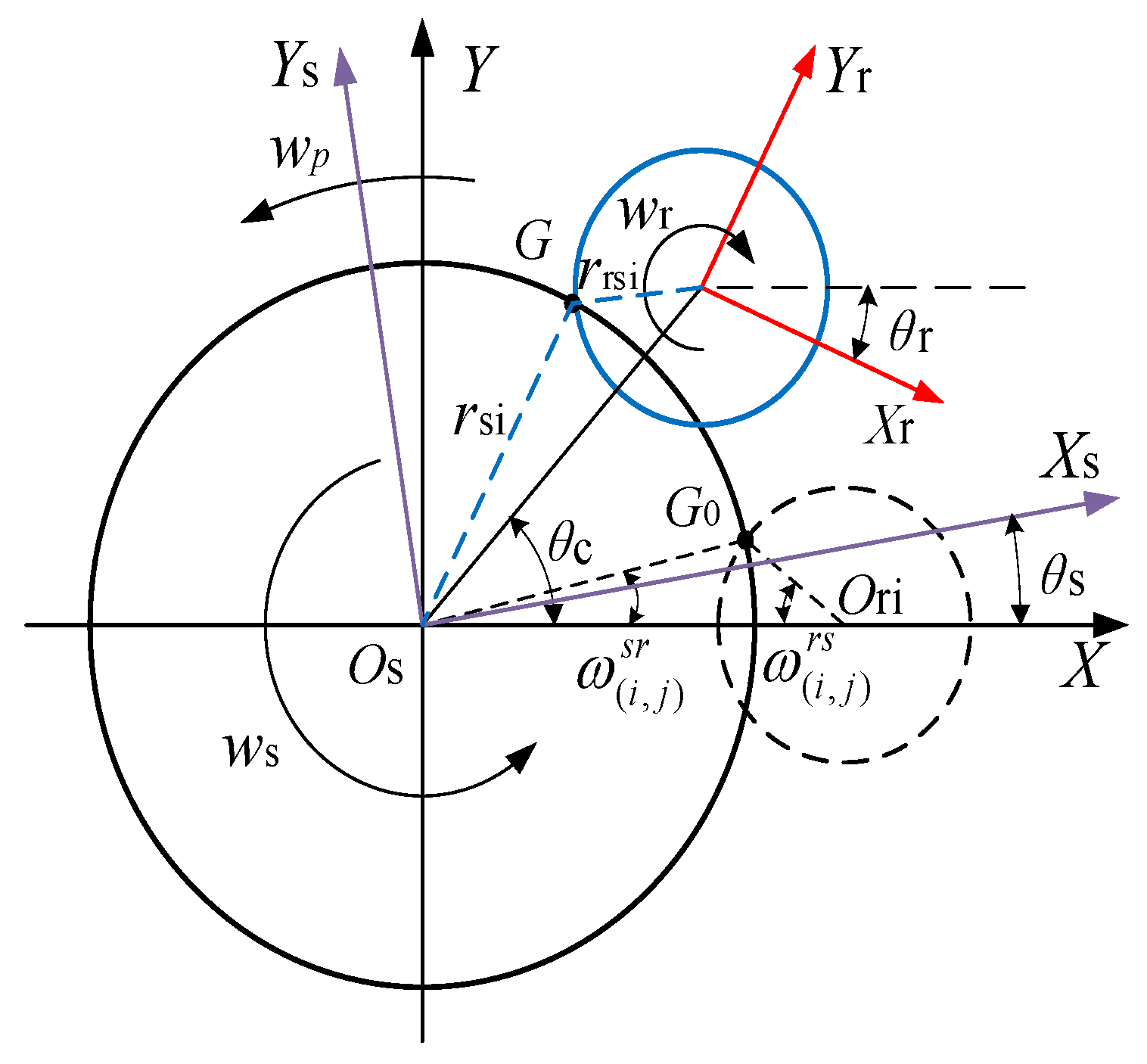
2.1. Coordinate Systems with Screw Misalignments
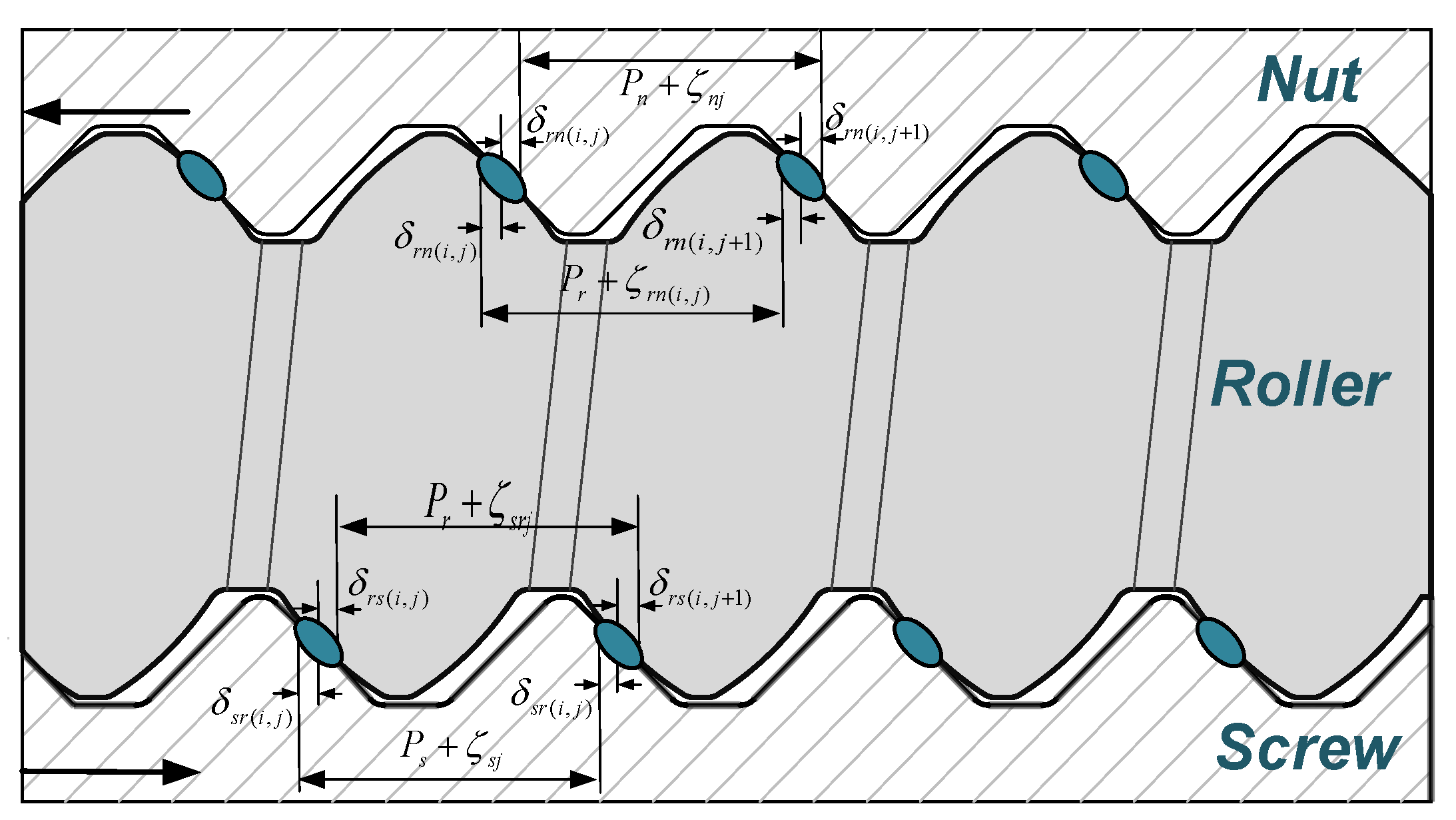
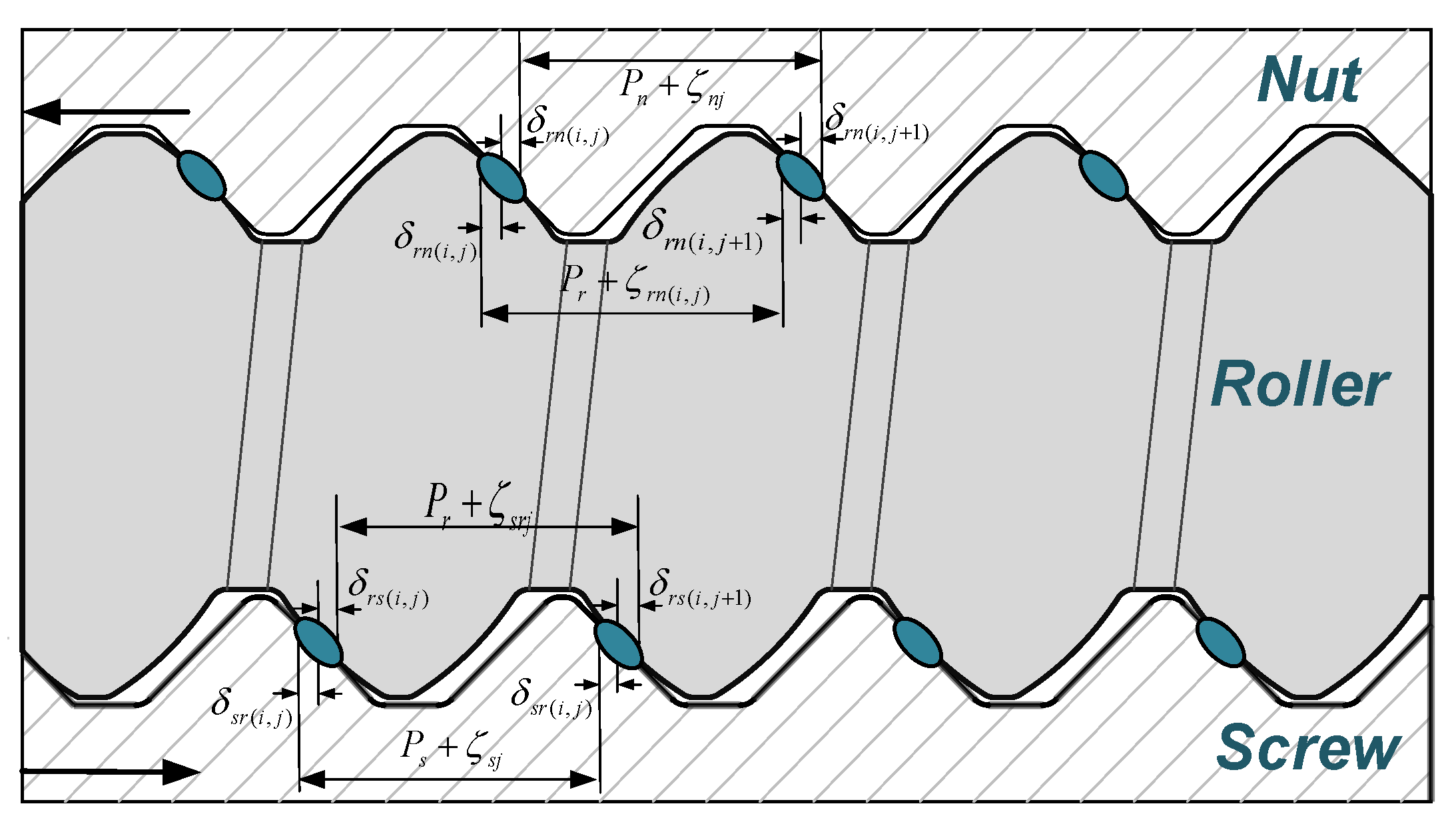
2.2. Contact Positions and Clearances at the Screw-Roller Interface
2.3. Contact Positions and Clearances at the Roller-Nut Interface
2.4. Calculation of Contact Forces
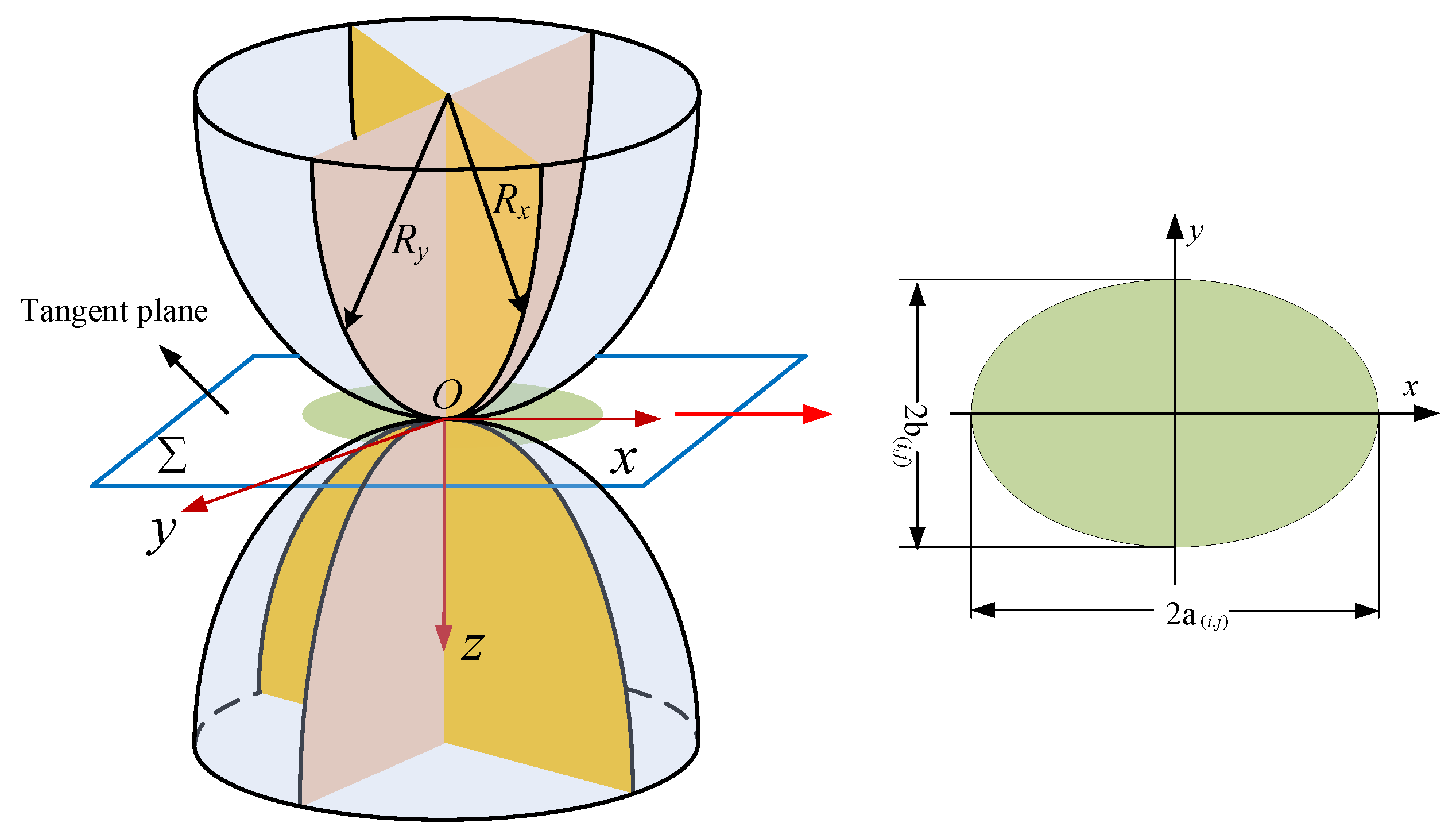
2.5. Calculation of the Contact Ellipses and Nominal Contact Area
2.6. Calculation of the Slip Velocity
3. Numerical Examples and Discussion
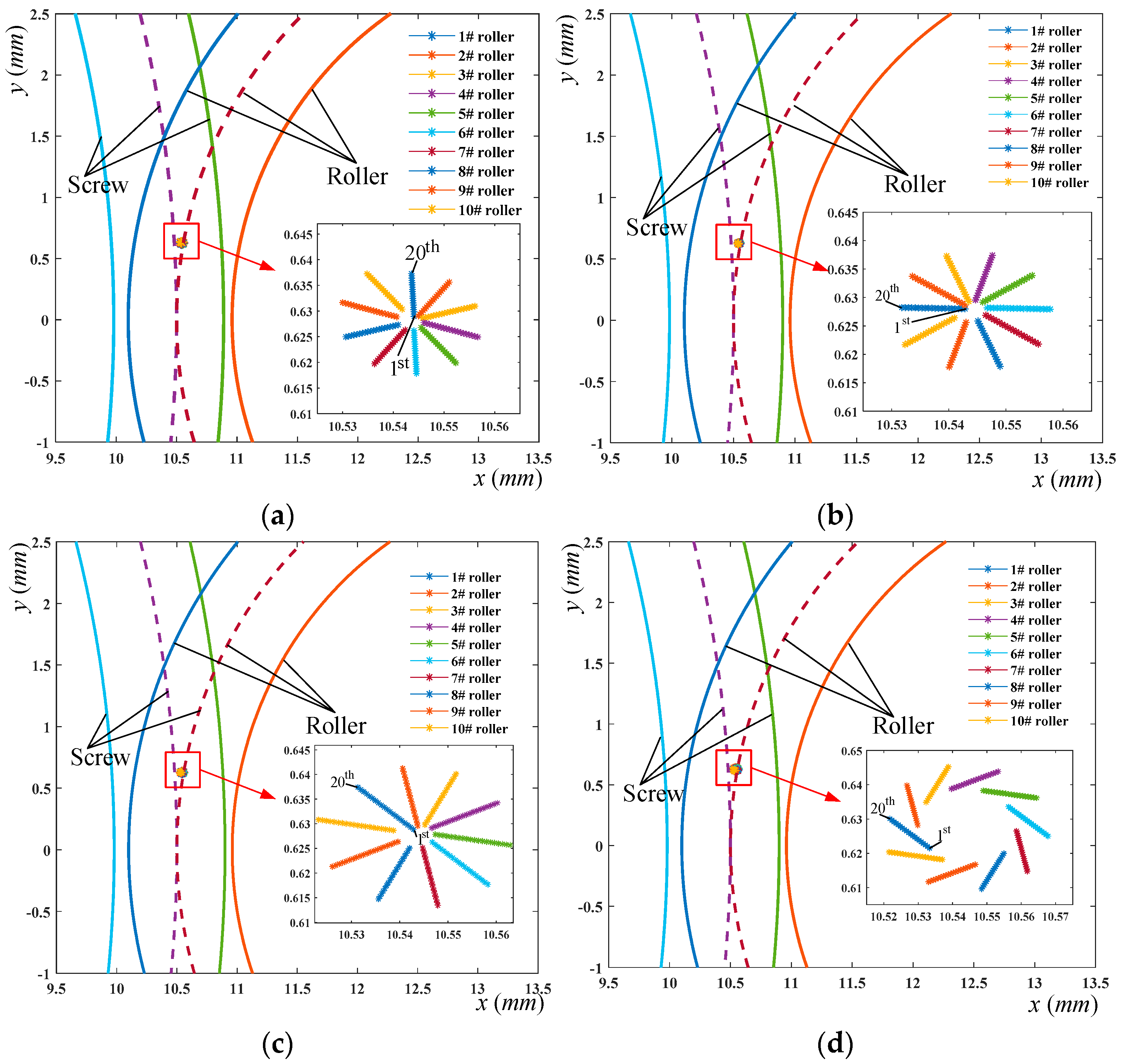
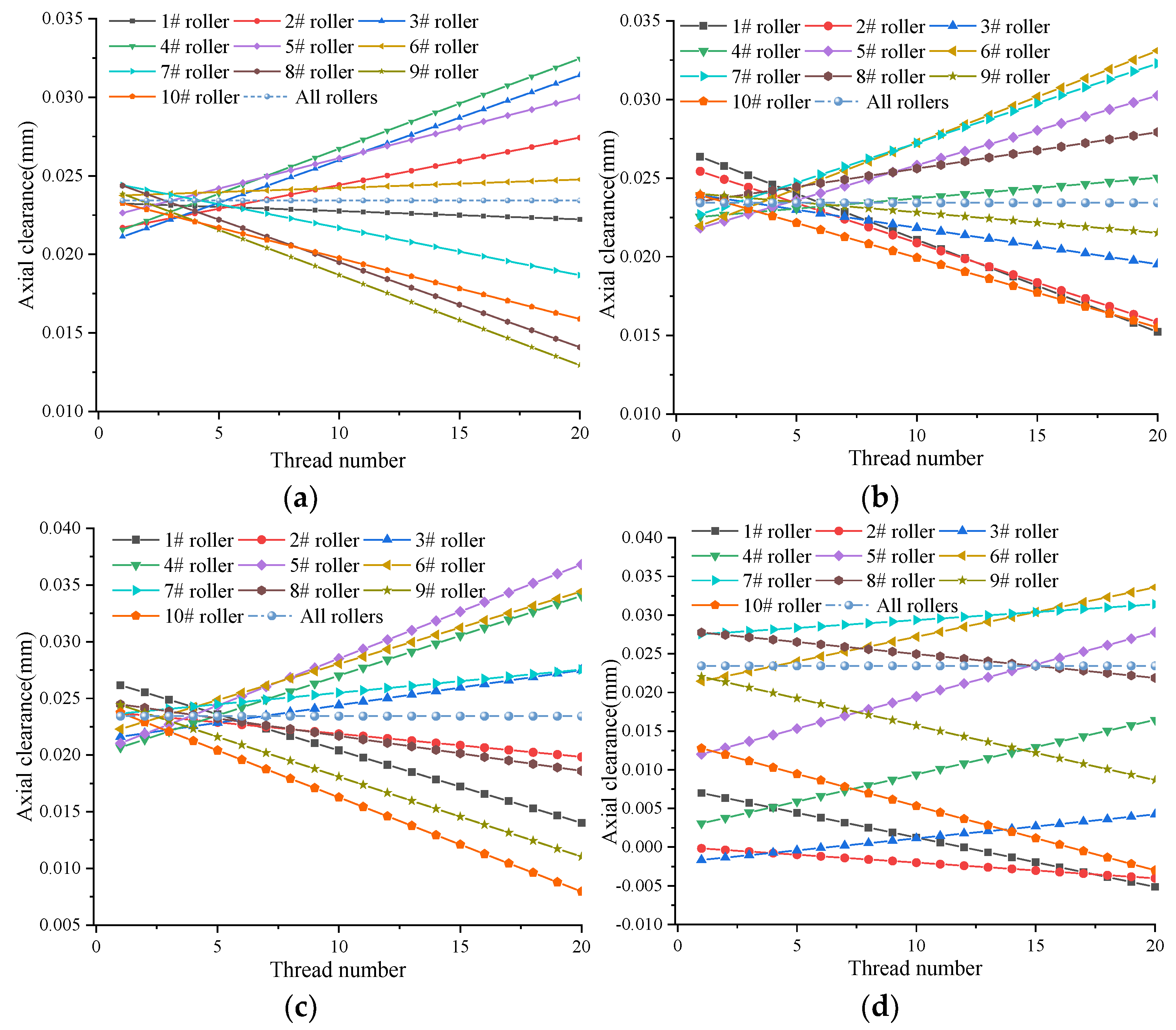
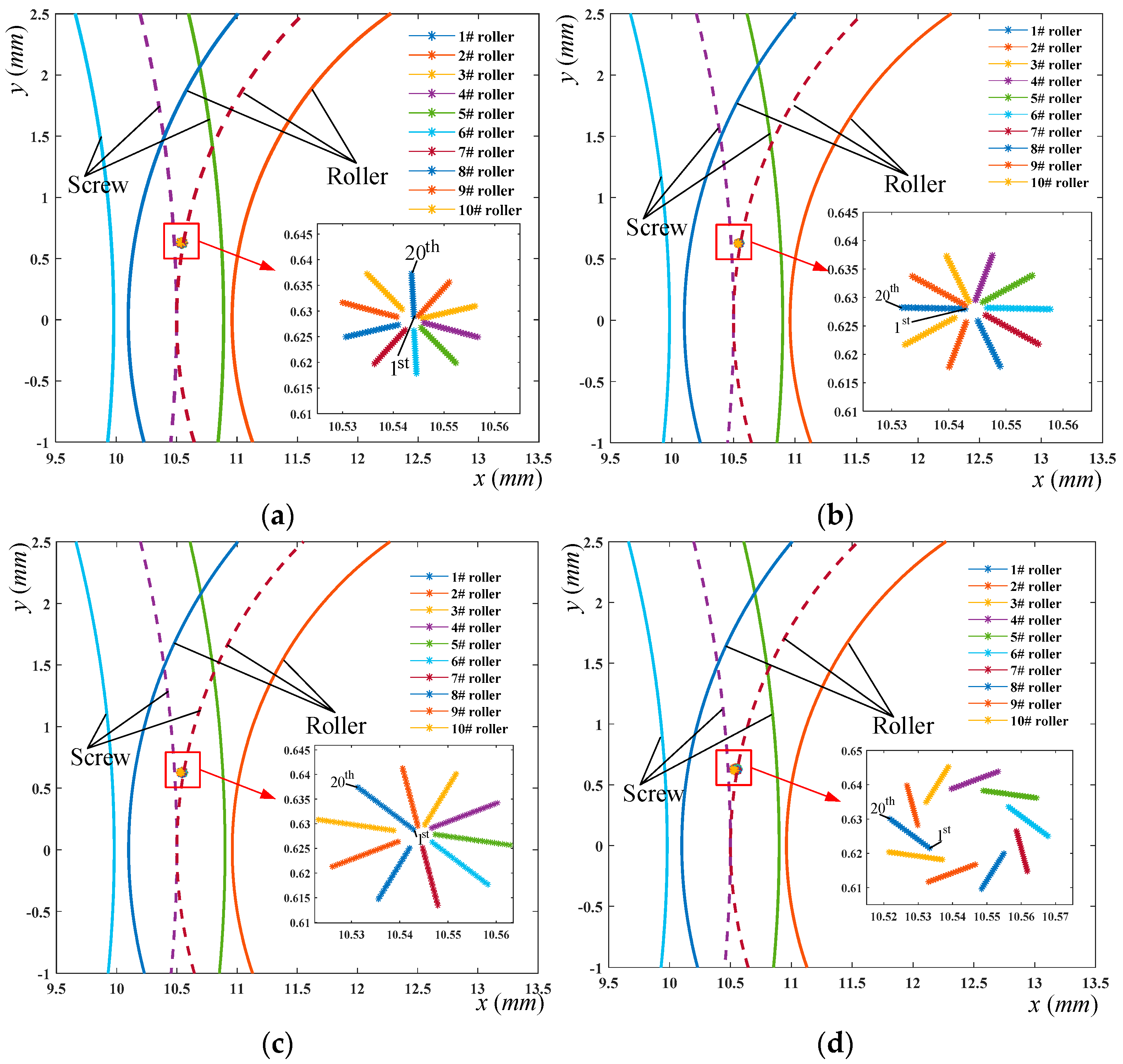
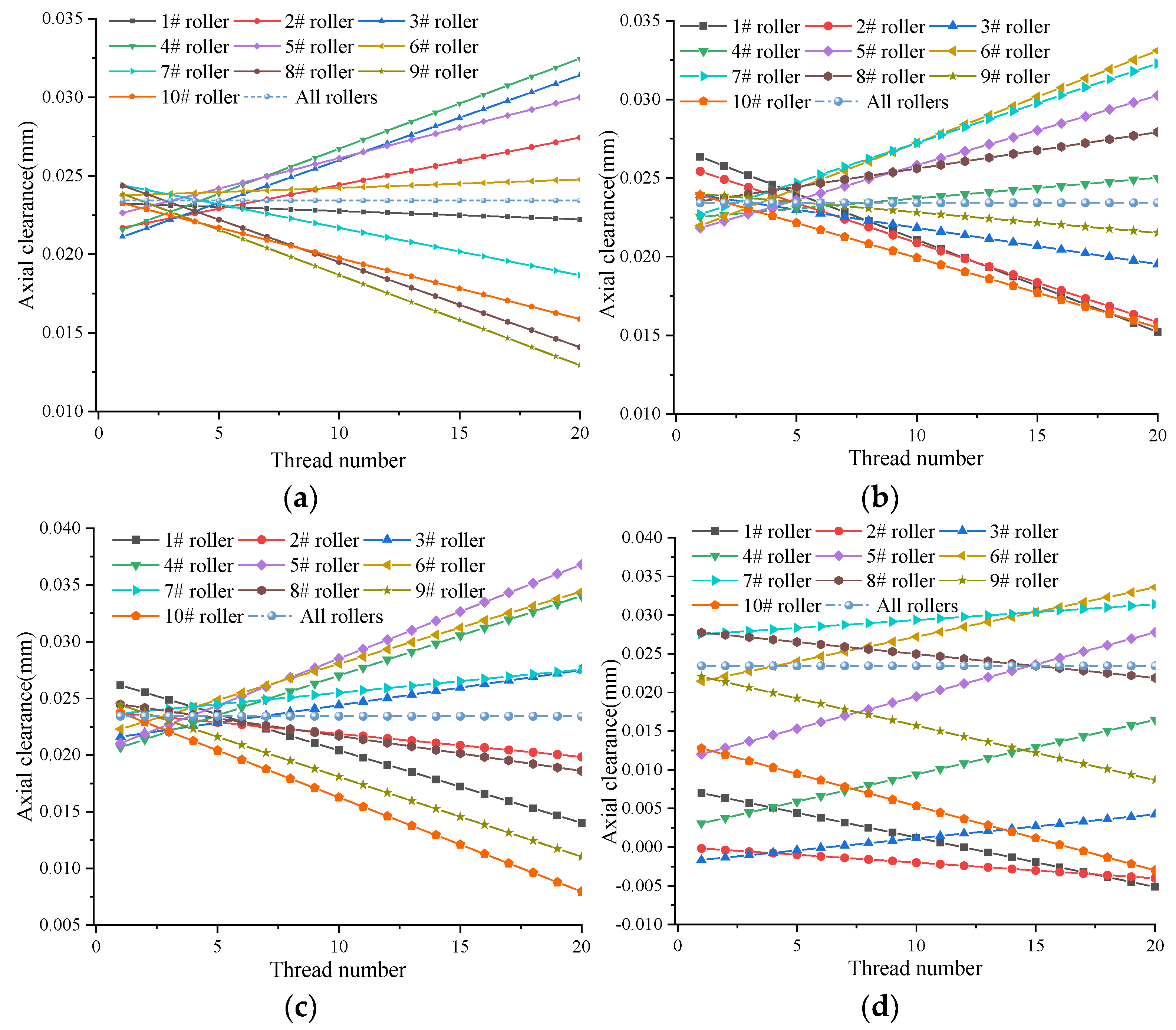
3.1. Effect of Misalignment on Contact Point Positions and Axial Clearances
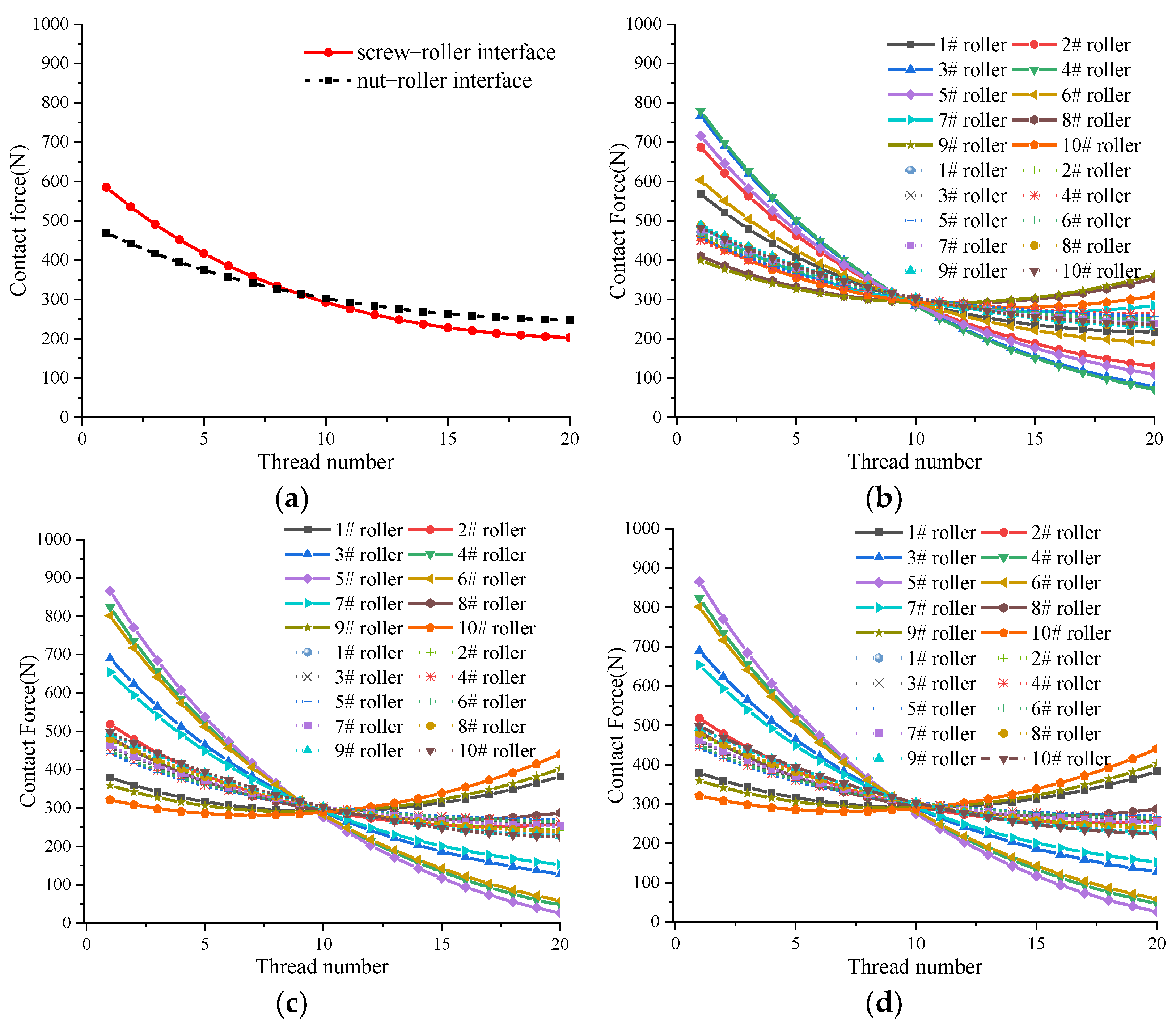
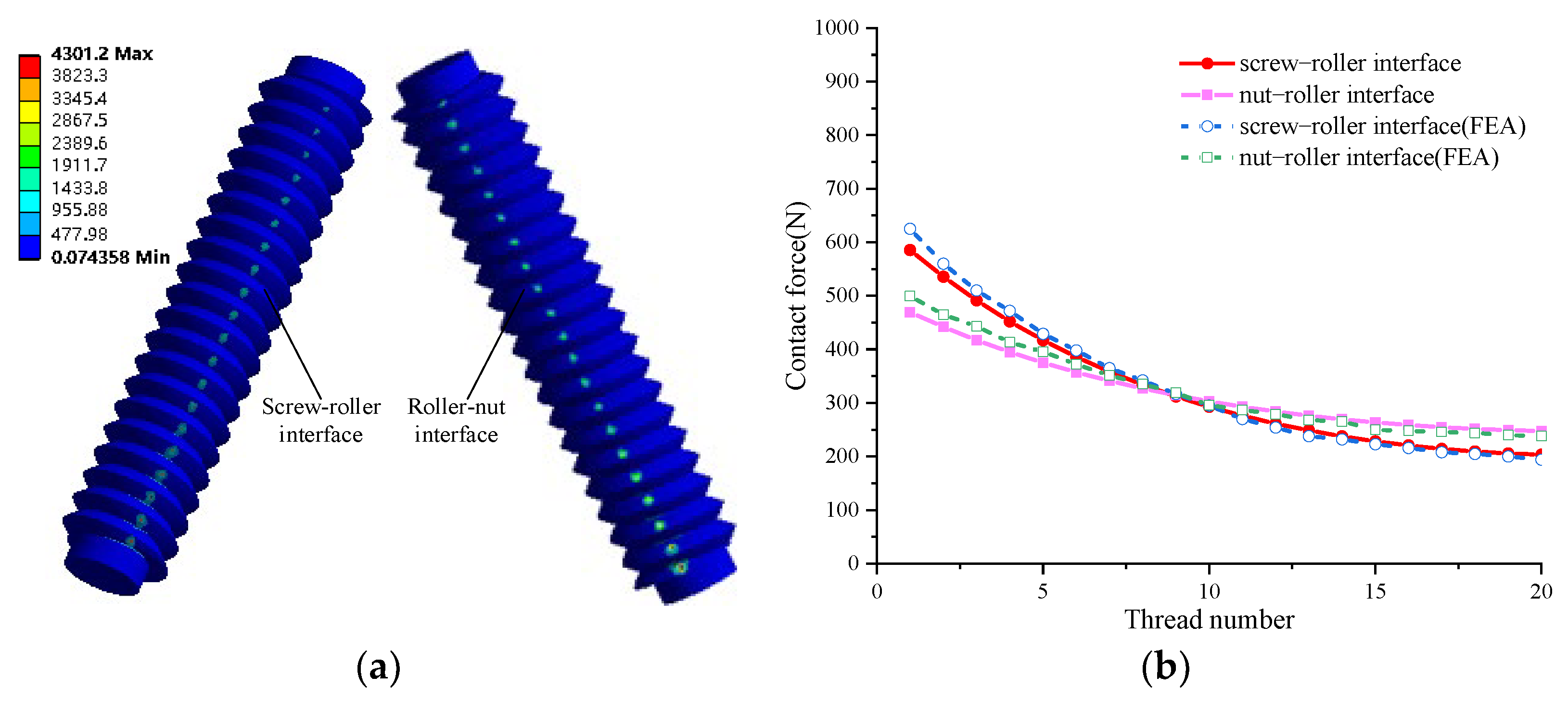
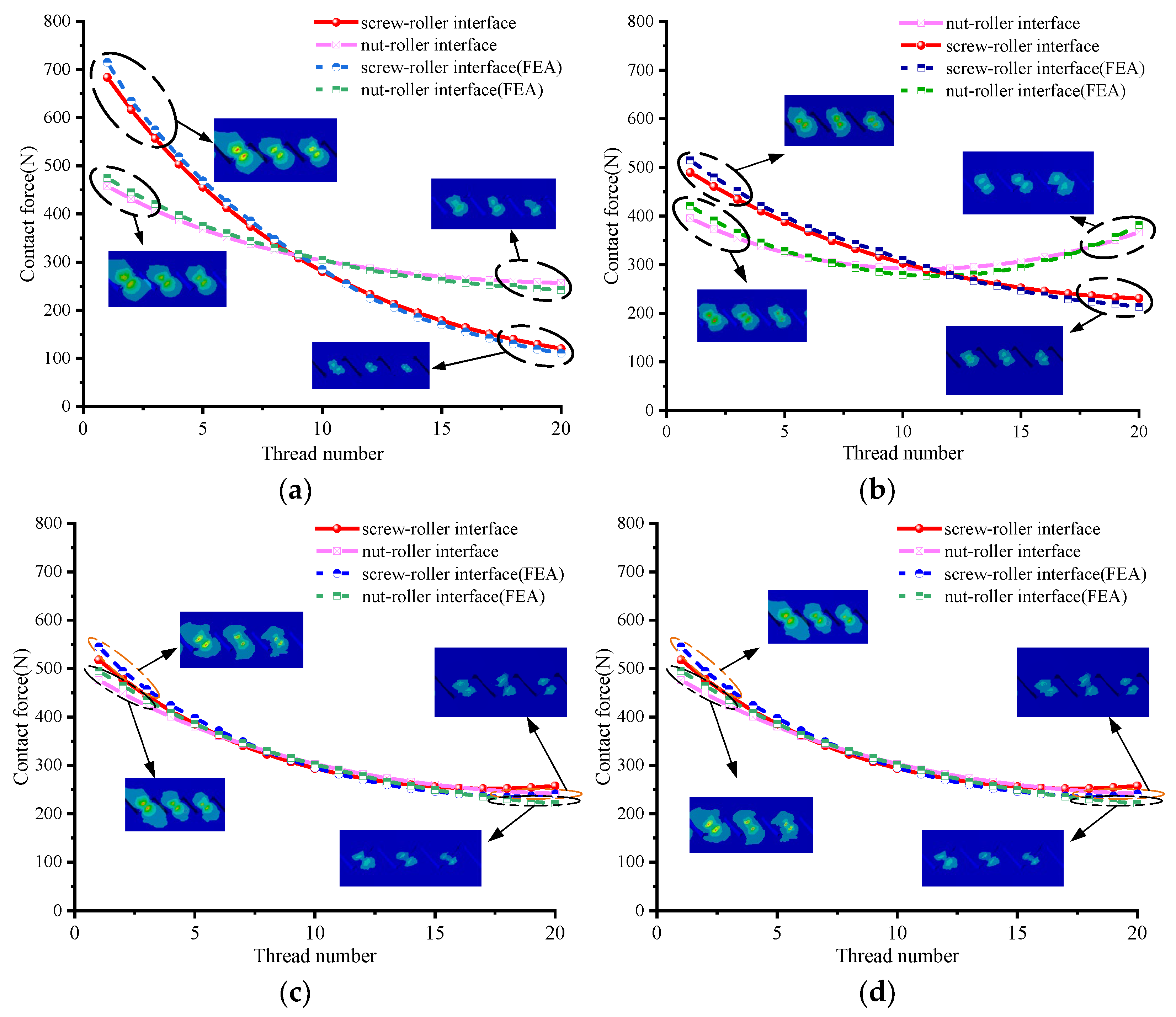
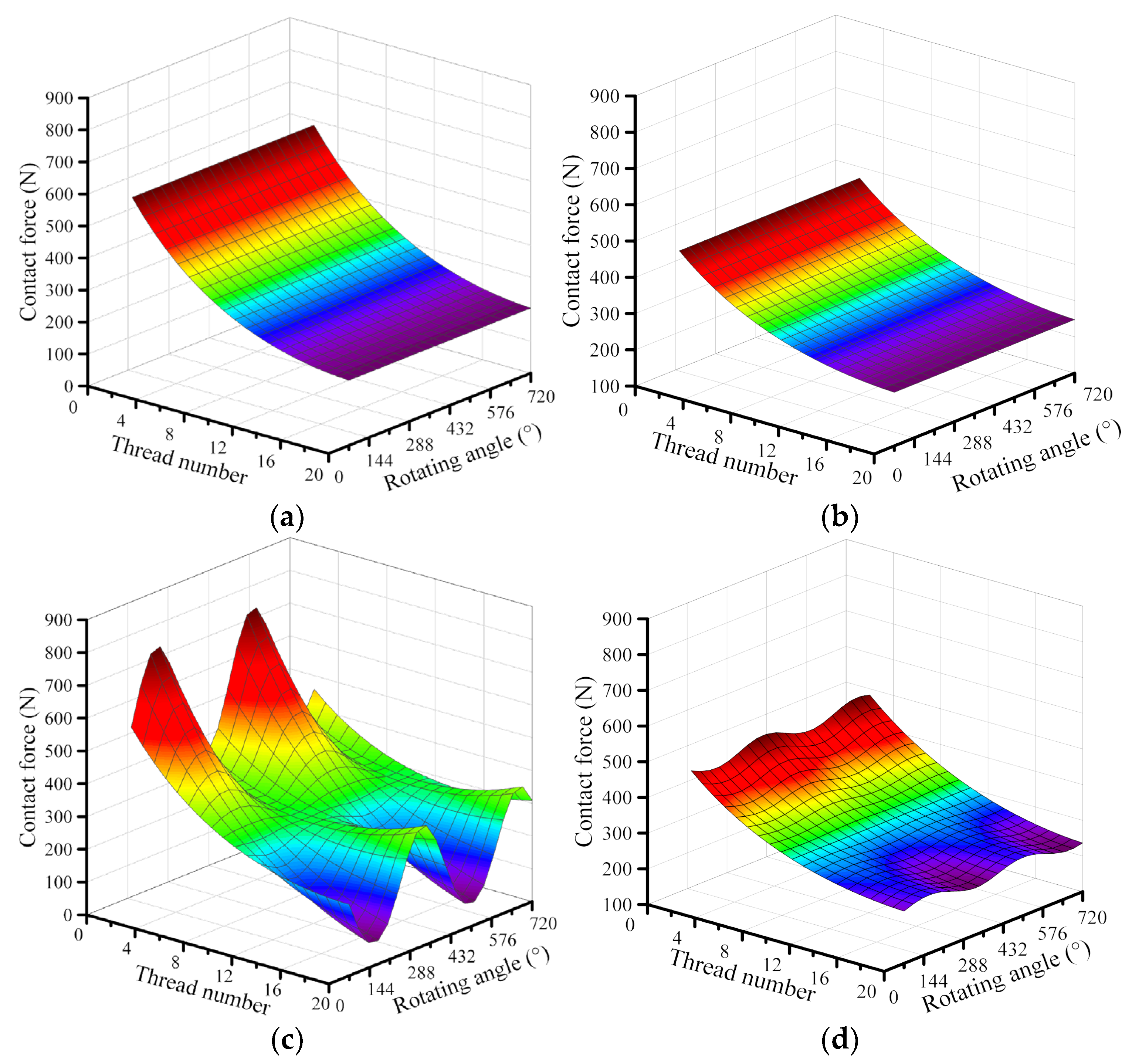
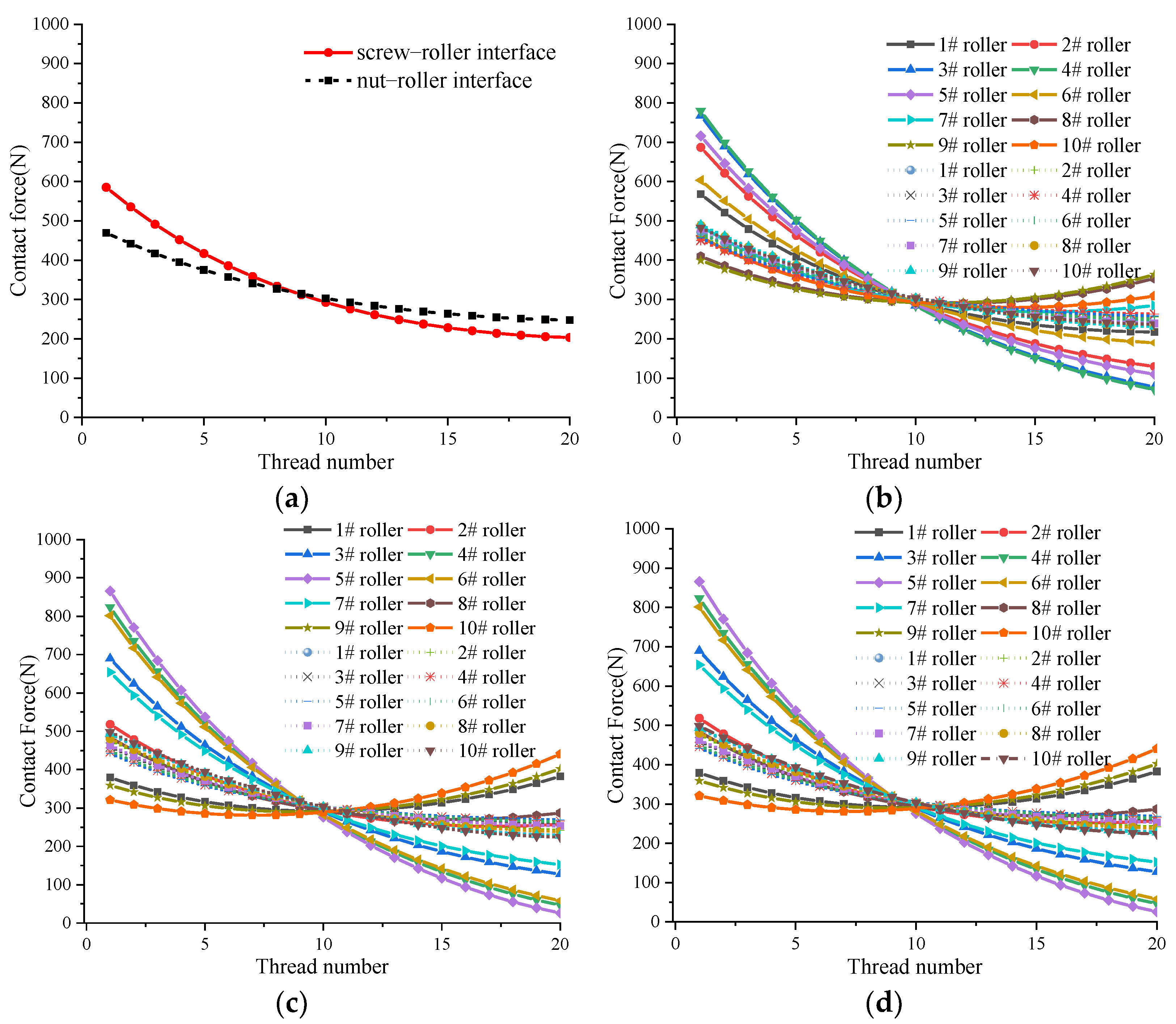
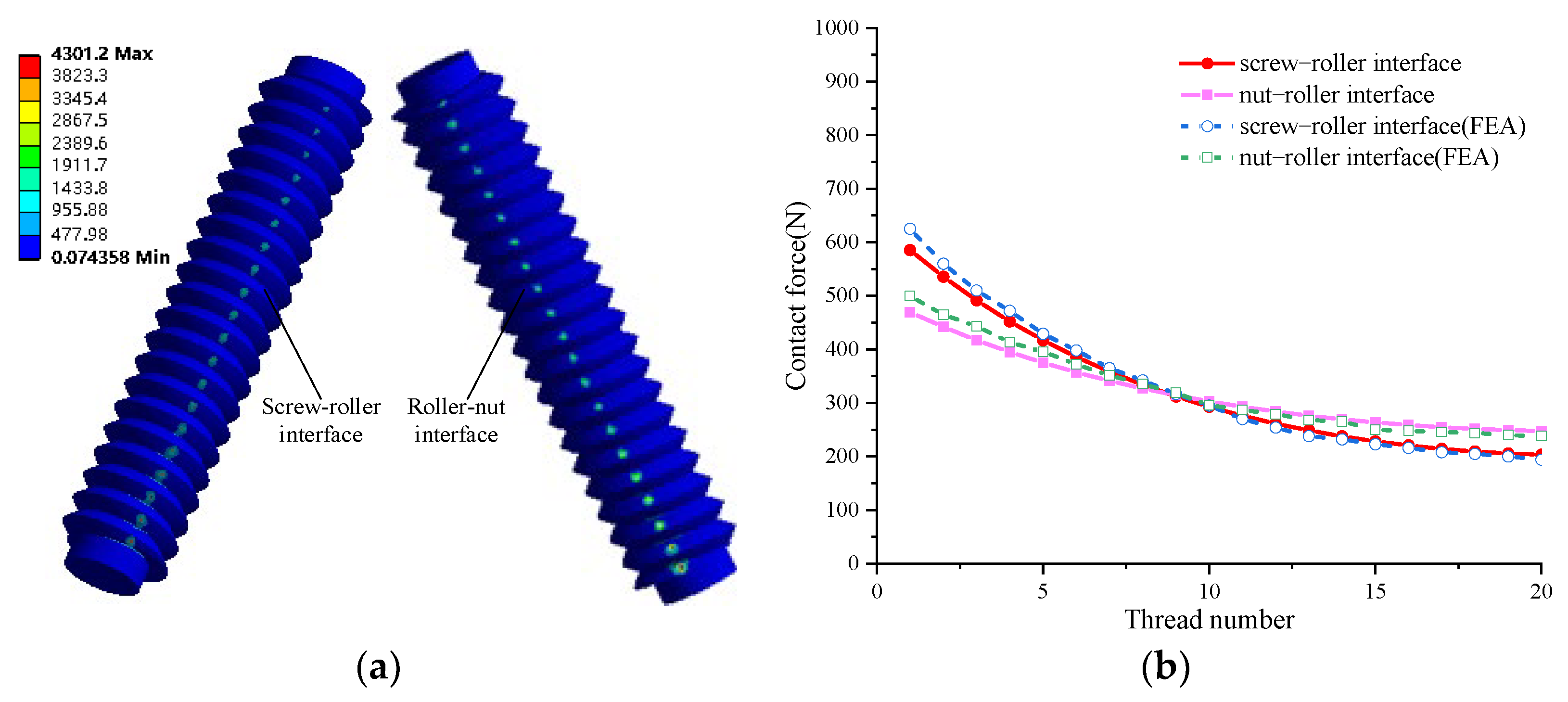
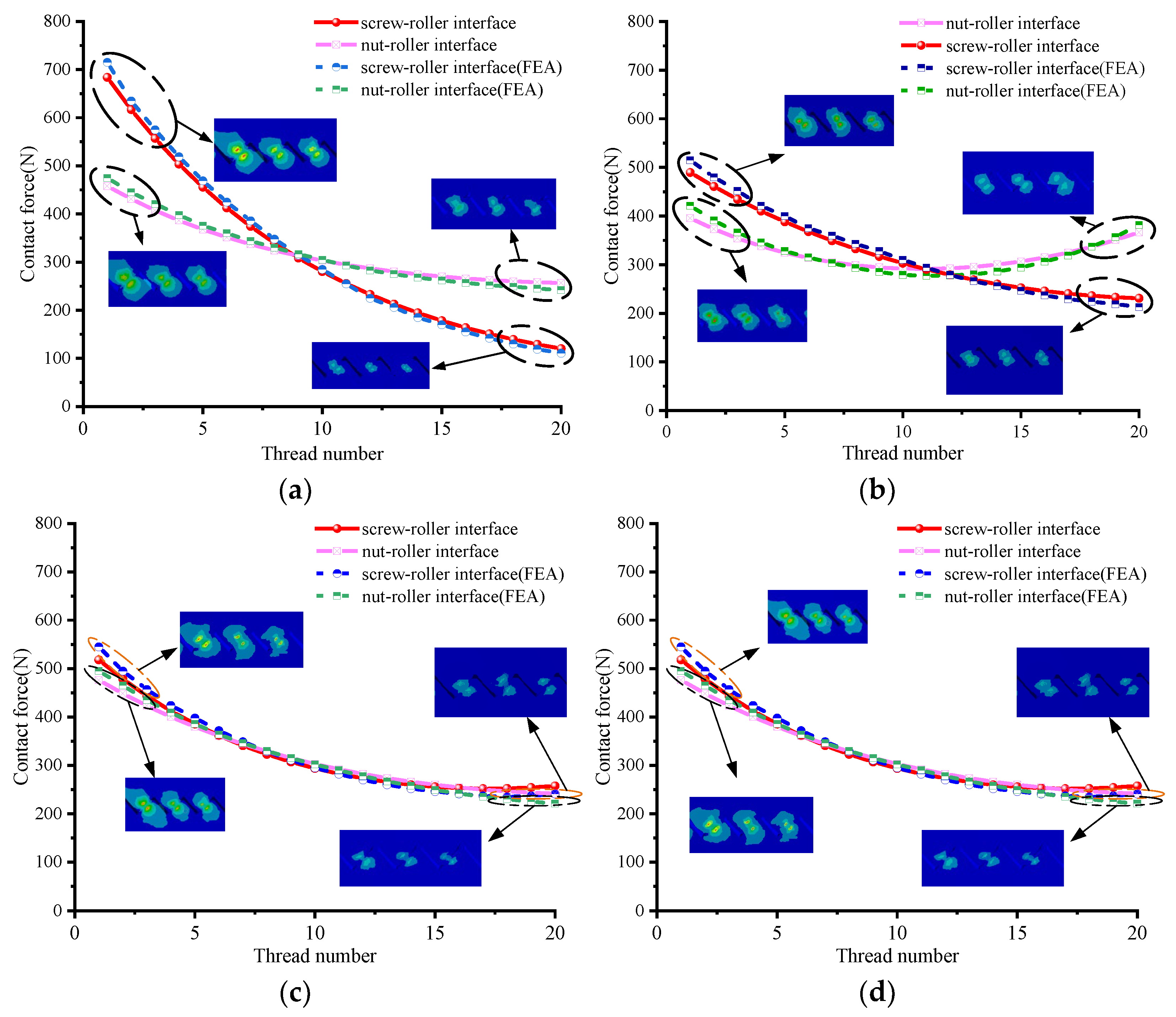
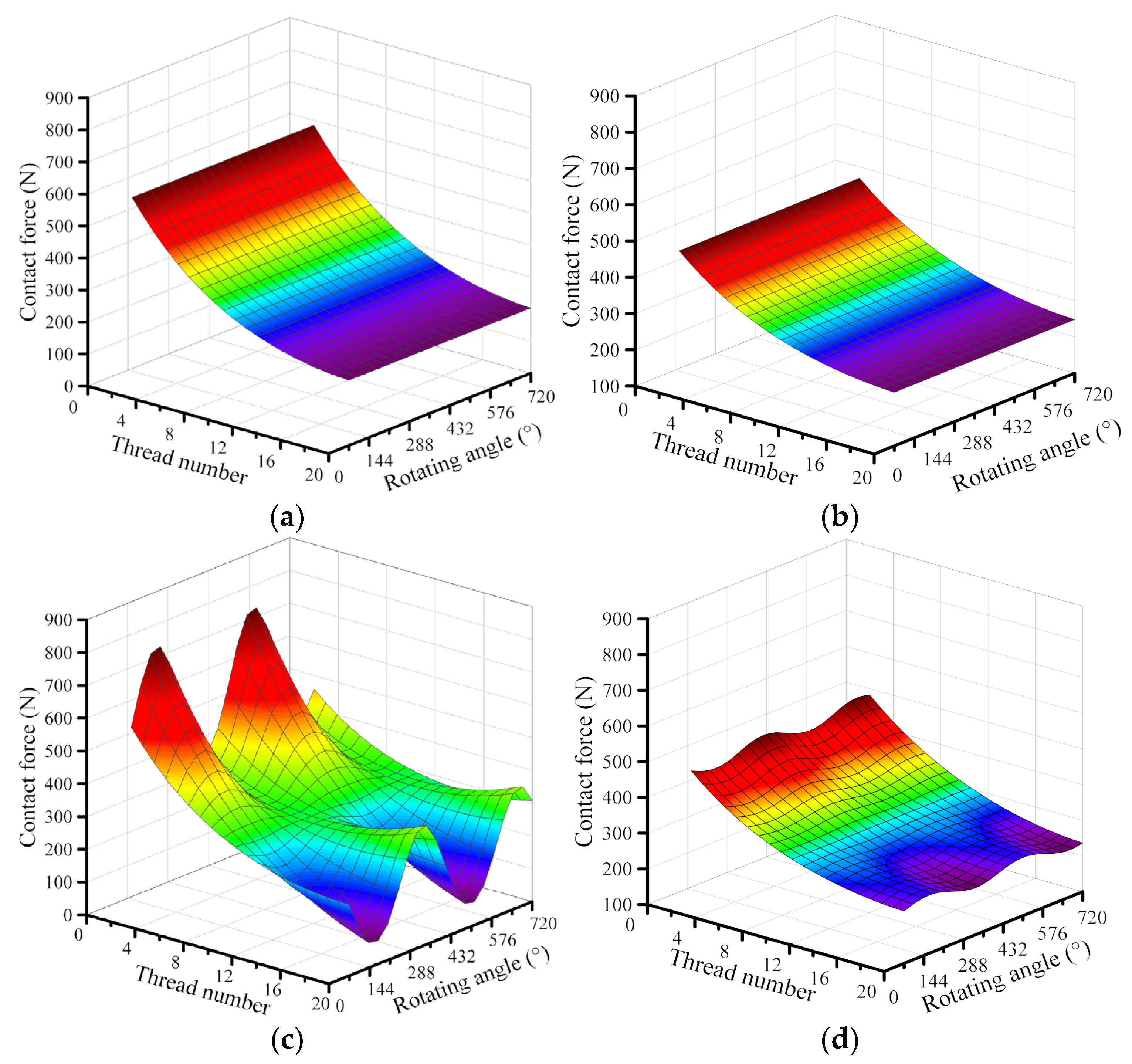
3.2. Effect of Misalignment on Load Distribution
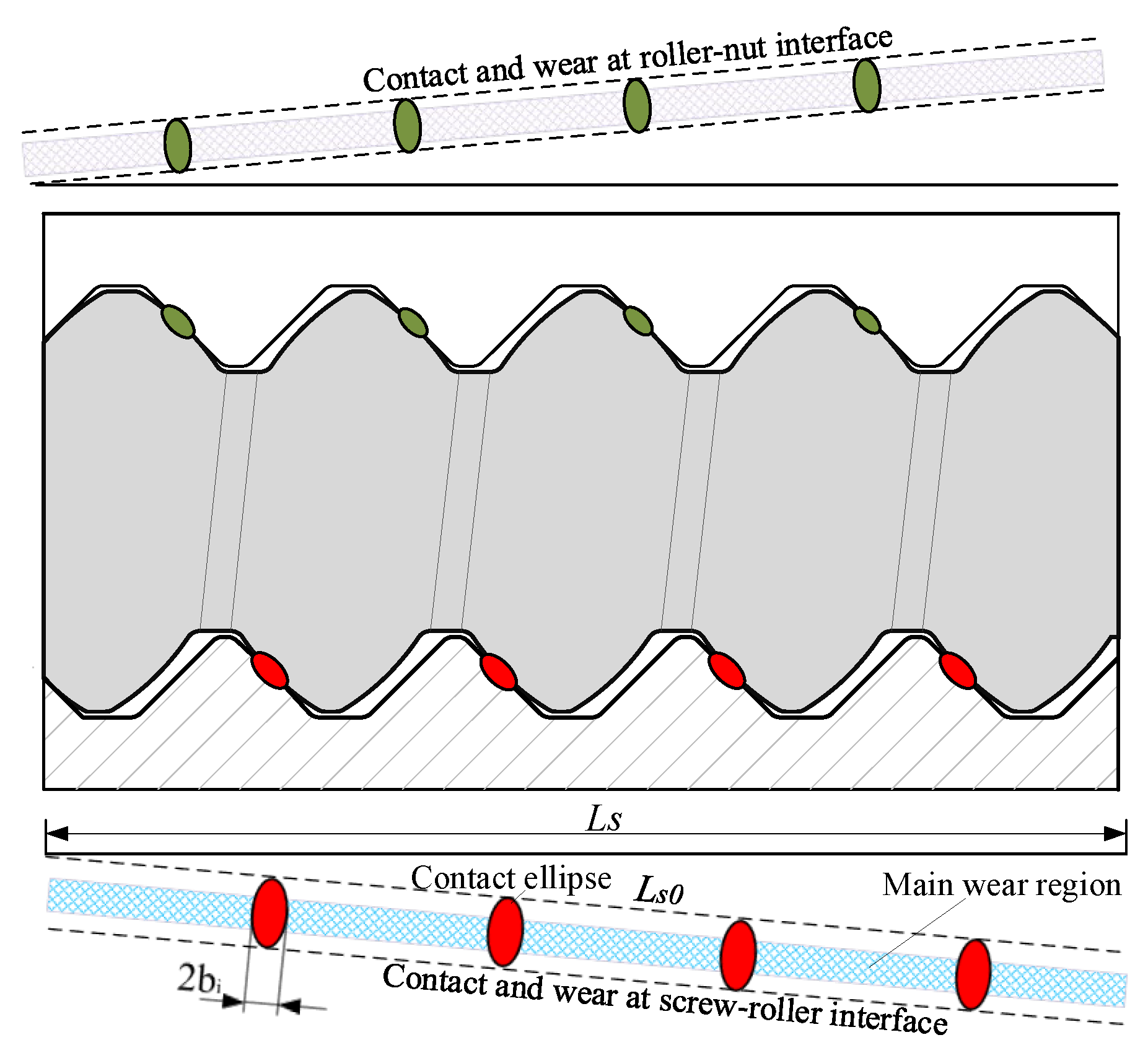
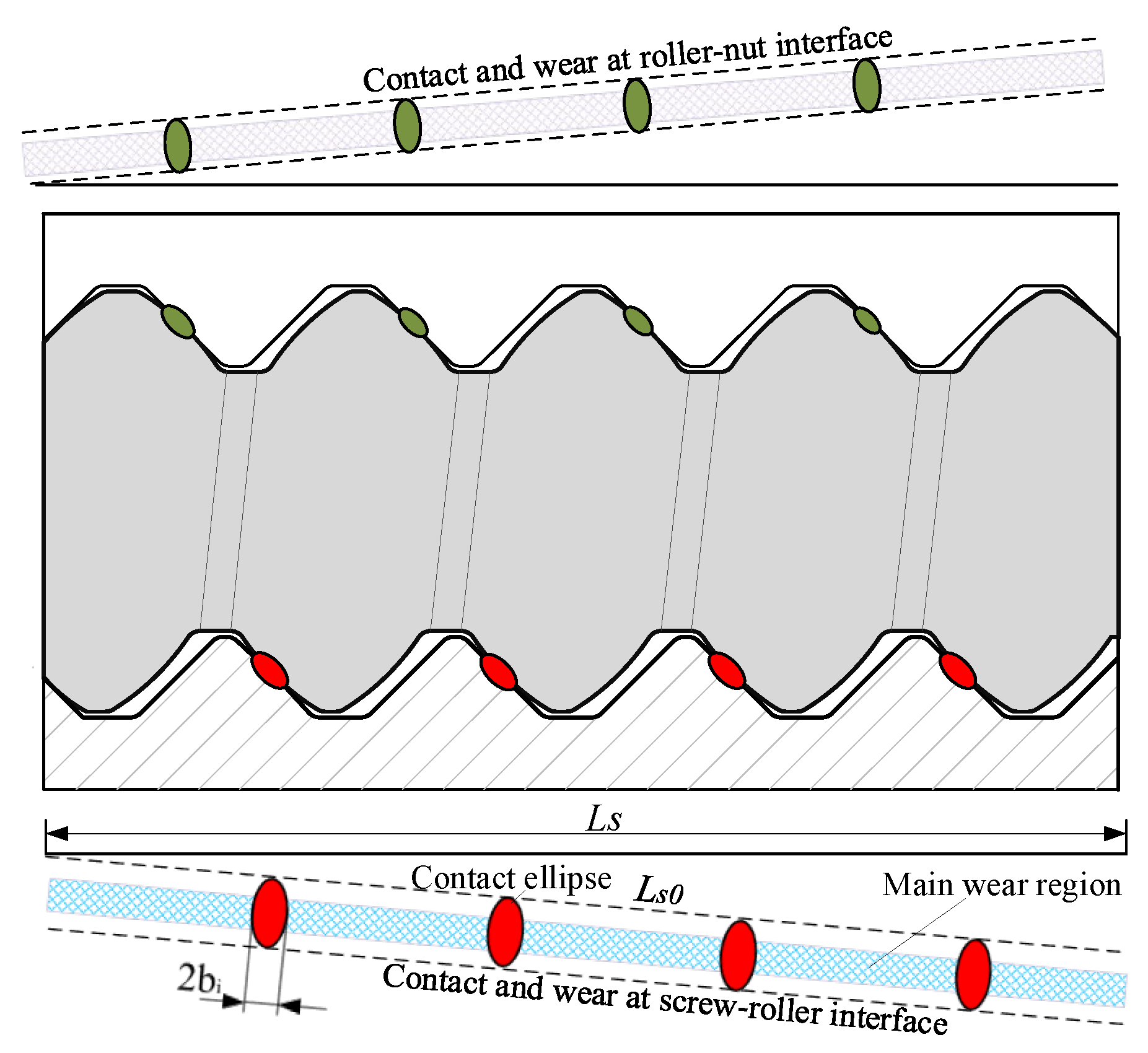
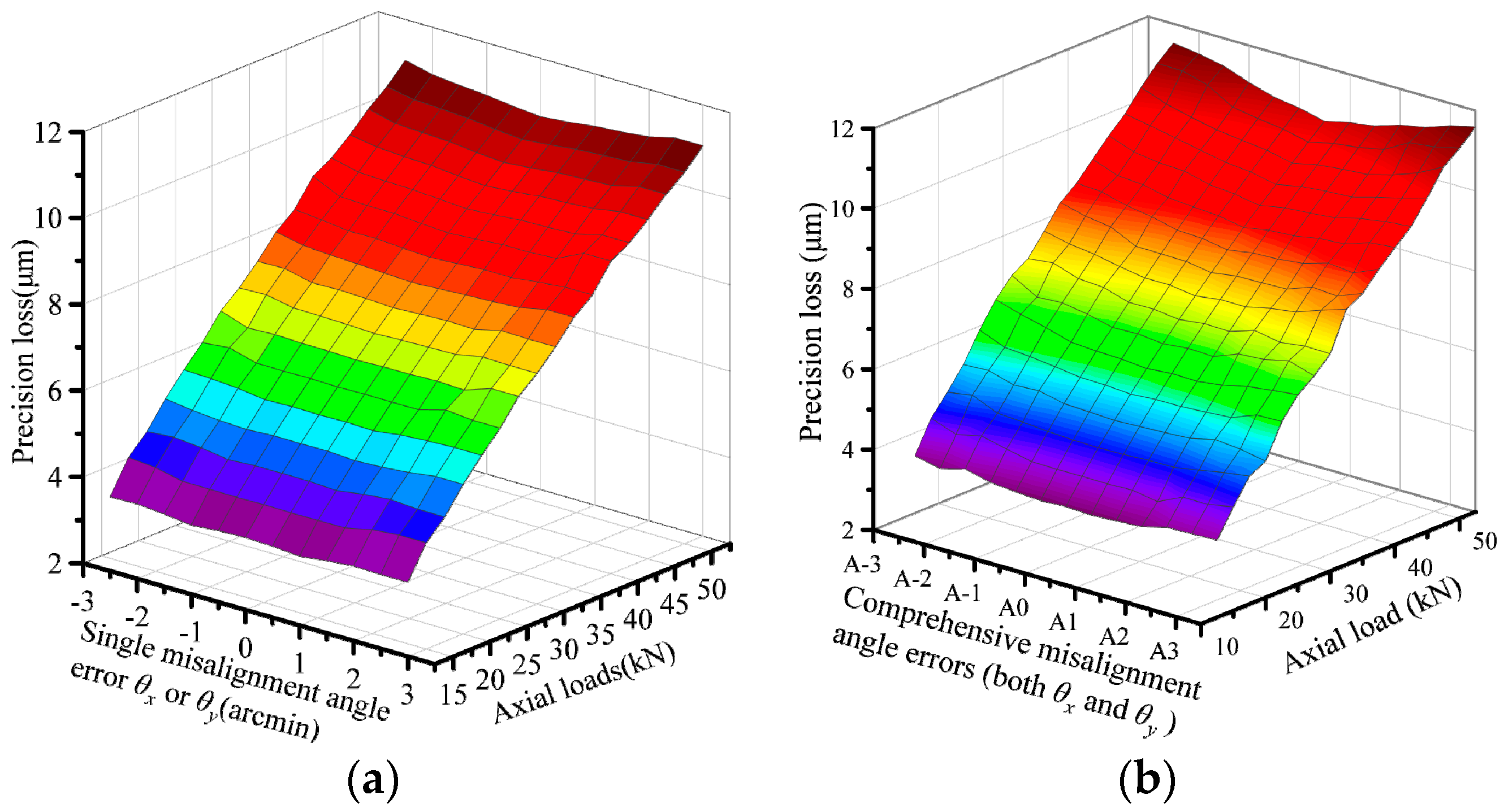
3.3. Effect of Misalignment on Wear and Precision Loss
4. Conclusions
- (1)
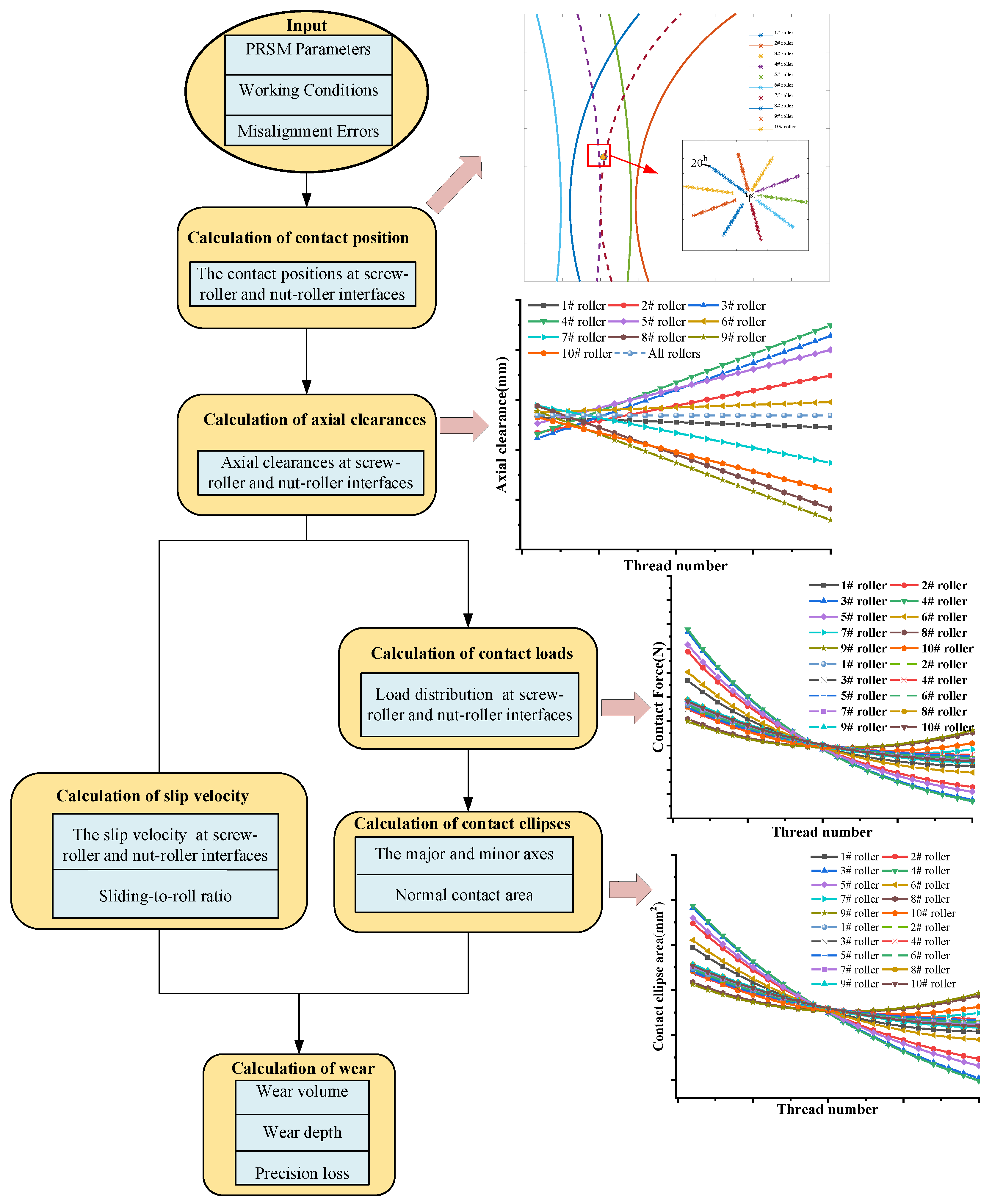
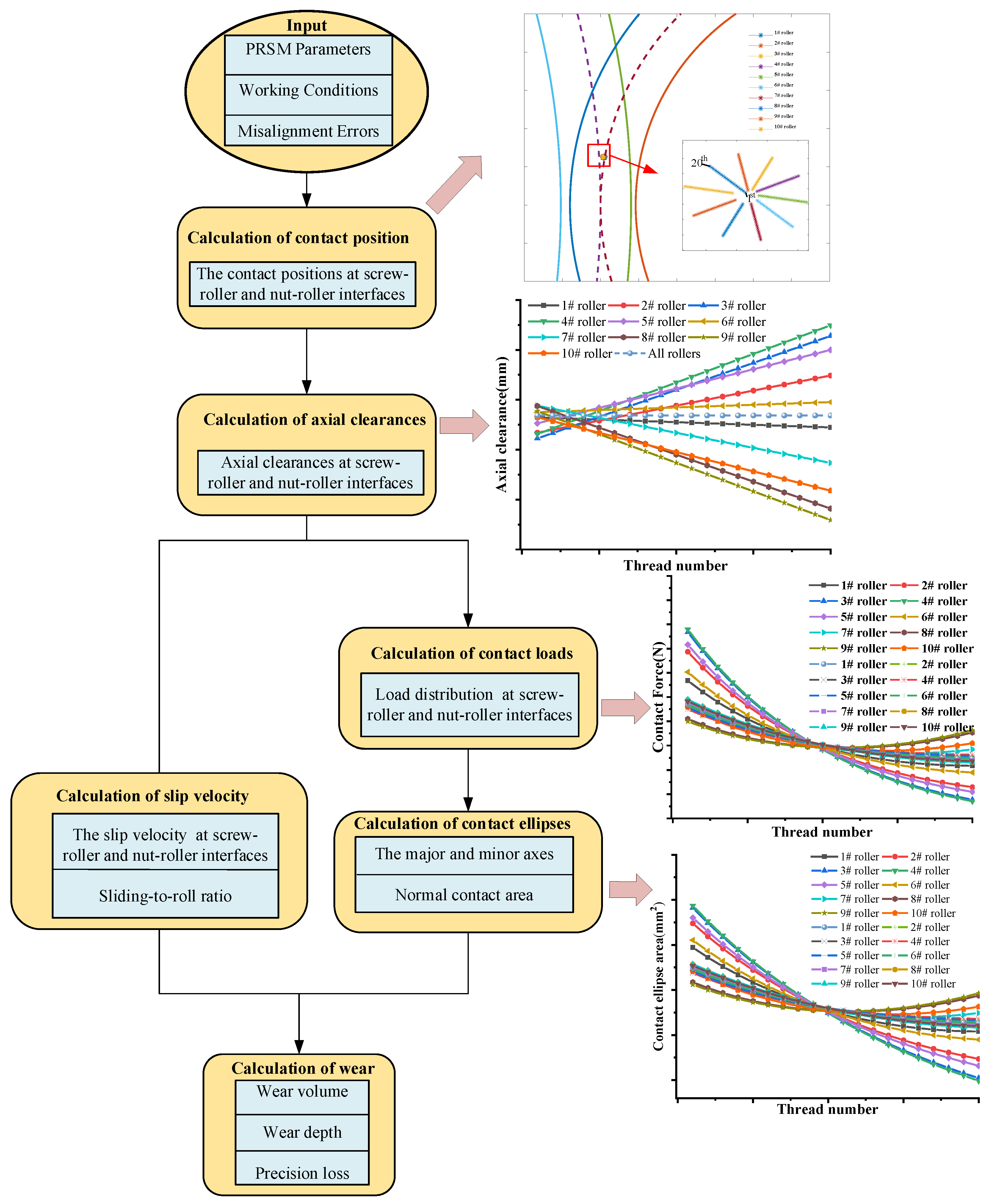
- The instant contact points and contact clearances are predicted by the unloaded meshing simulation. The simulation result suggests the misaligned angle errors slightly affect the contact positions and axial clearances of the PRSM, while the offset errors obviously change the contact positions and increase axial clearances. However, the difference between the maximum and minimum clearances caused by the offset error is equal and that of the axial clearance between adjacent threads is also the same.
- (2)
- The load distribution is calculated based on the improved load model considering the variation of axial clearances and contact angles. Based on the numerical results, the load distribution is greatly affected by the misalignment angles of the screw. Those results are validated by taking advantage of the results obtained from the FEA. Moreover, the contact forces of the misaligned PRSM change periodically under normal working conditions, while those of the aligned PRSM are constant under the same thread teeth.
- (3)
- The precision loss is predicted by the accumulated wear depth. The variables (such as contact forces, contact ellipses and sliding velocities) which have affected the results of the wear depth are taken into consideration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| a: b | Semi-major and the semi-minor axes of contact ellipse, respectively, (mm) |
| cs, cr, cn | Half of thread tooth thickness of the screw, roller and nut, respectively, (mm) |
| d0s, d0r, d0n | Nominal diameters of the screw, roller and nut, respectively, (mm) |
| d1s, d1r, d1n | Root diameters of the screw, roller and nut, respectively, (mm) |
| d2s, d2r, d2n | Outside diameters of the screw, roller and nut, respectively, (mm) |
| Axial clearances at screw-roller and roller-nut interfaces, respectively, (mm) | |
| Wear depth at screw-roller and roller-nut interfaces, respectively, (mm) | |
| ma, mb | Major and minor semi-axis coefficients of the contact ellipse, respectively, (mm) |
| rs, rr, rn | Nominal radius of the screw, roller and nut, respectively, (mm) |
| us, ur, un | Surface coordinates of the screw, roller and nut, respectively, (mm) |
| ws, wp | Rotate speed of the screw and revolution speed of the roller, respectively, (mm) |
| As, Ar, An | Cross-sectional area of the screw, roller and nut, respectively, (mm) |
| Nominal contact area of the contact ellipse at screw-roller and roller-nut interfaces, respectively, (mm2) | |
| Es, Er, En | Effective Young’s modulus of the screw, roller and nut, respectively, (MPa) |
| Axial forces at screw-roller and roller-nut interfaces, respectively, (mm) | |
| Fn | Normal contact force, (N) |
| Axial stiffness of the screw, roller and nut, respectively, (mm) | |
| Hertz contact stiffnesses at screw-roller and roller-nut interfaces, respectively, (mm) | |
| Ls, Ls0 | Effective travel of the screw and length of the abraded areas of the screw, respectively (mm) |
| R | Radius of the effective ball of the roller, (mm) |
| Greek letters | |
| θsx, θsy | Misalignment angle errors in xs and ys direction, respectively, (rad) |
| θs, θm, θn | Rotate angles about screw, roller and nut, respectively, (rad) |
| εs | Offset vector in the screw |
| ζs, ζsr, ζn | Axial deformation, (mm) |
| τi | Separation angle of i# roller with respect to 1# roller, (rad) |
References
- Lohmeier, S.; Buschmann, T.; Ulbrich, H. Humanoid robot LOLA. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 775–780. [Google Scholar]
- Garcia, J.R.; Cusido, J.; Rosero, J.A.; Ortega, J.A.; Romeral, L. Reliable electro-mechanical actuators in aircraft. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 19–25. [Google Scholar] [CrossRef]
- Li, L.; Fu, Y.; Zheng, S.; Fu, J.; Xia, T. Friction Torque Analysis of Planetary Roller Screw Mechanism in Roller Jamming. Math. Probl. Eng. 2020, 2020, 1392380. [Google Scholar] [CrossRef]
- Ma, S.; Wu, L.; Fu, X.; Li, Y.; Liu, G. Modelling of static contact with friction of threaded surfaces in a planetary roller screw mechanism. Mech. Mach. Theory 2019, 139, 212–236. [Google Scholar] [CrossRef]
- Ma, S.; Liu, G.; Tong, R.; Fu, X. A Frictional Heat Model of Planetary Roller Screw Mechanism Considering Load Distribution. Mech. Based Des. Struct. Mach. 2015, 43, 164–182. [Google Scholar] [CrossRef]
- Xie, Z.; Xue, Q.; Wu, J.; Gu, L.; Wang, L.; Song, B. Mixed-lubrication analysis of planetary roller screw. Tribol. Int. 2019, 140, 105883. [Google Scholar] [CrossRef]
- Wu, L.; Ma, S.; Wan, Q.; Liu, G. Dynamic Model of Planetary Roller Screw Mechanism with Considering Torsional Degree of Freedom. In Proceedings of the 6th International Conference on Mechatronics and Mechanical Engineering (ICMME 2019), Osaka, Japan, 27–30 November 2020; p. 1003. [Google Scholar] [CrossRef] [Green Version]
- Fu, X.; Liu, G.; Ma, S.; Tong, R.; Li, X. An efficient method for the dynamic analysis of planetary roller screw mechanism. Mech. Mach. Theory 2020, 150, 103851. [Google Scholar] [CrossRef]
- Fu, X.; Liu, G.; Tong, R.; Ma, S.; Lim, T.C. A nonlinear six degrees of freedom dynamic model of planetary roller screw mechanism. Mech. Mach. Theory 2018, 119, 22–36. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A.; Lasky, T.A. Dynamics of the Planetary Roller Screw Mechanism. J. Mech. Robot. 2015, 8, 014503. [Google Scholar] [CrossRef]
- Meng, J.; Du, X.; Li, Y.; Chen, P.; Xia, F.; Wan, L. A Multiscale Accuracy Degradation Prediction Method of Planetary Roller Screw Mechanism Based on Fractal Theory Considering Thread Surface Roughness. Fractal Fract. 2021, 5, 237. [Google Scholar] [CrossRef]
- Velinsky, S.A.; Chu, B.; Lasky, T.A. Kinematics and Efficiency Analysis of the Planetary Roller Screw Mechanism. J. Mech. Des. 2008, 131, 011016. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A. Contact Kinematics in the Roller Screw Mechanism. J. Mech. Des. 2013, 135, 051003. [Google Scholar] [CrossRef]
- Liu, Y.; Shang, Y.; Wang, J. Mathematical analysis of the meshing performance of planetary roller screws applying different roller thread shapes. Adv. Mech. Eng. 2017, 9, 1687814017703009. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Cheng, H.; Sun, Y. Kinematics Analysis of the Roller Screw Based on the Accuracy of Meshing Point Calculation. Math. Probl. Eng. 2015, 2015, 303972. [Google Scholar] [CrossRef] [Green Version]
- Fu, X.; Liu, G.; Ma, S.; Tong, R.; Lim, T.C. A Comprehensive Contact Analysis of Planetary Roller Screw Mechanism. J. Mech. Des. 2017, 139, 012302. [Google Scholar] [CrossRef]
- Xiaojun, F.U.; Geng, L.I.U.; Shangjun, M.A. Meshing Properties of Planetary Roller Screw Mechanism within Misalignments. Chin. J. Mech. Eng. 2017, 53, 25–33. [Google Scholar] [CrossRef]
- Du, X.; Chen, B.; Liu, R.; Li, C. Research on Fractal Model of Load Distribution and Axial Stiffness of Planetary Roller Screw Mechanism Considering Surface Roughness and Friction Factor. Adv. Theory Simul. 2022, 5, 2100399. [Google Scholar] [CrossRef]
- Du, X.; Chen, B.; Zheng, Z. Investigation on mechanical behavior of planetary roller screw mechanism with the effects of external loads and machining errors. Tribol. Int. 2021, 154, 106689. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, G.; Ma, S.; Tong, R. Load distribution over threads of planetary roller screw mechanism with pitch deviation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4653–4666. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, G.; Tong, R.; Ma, S. Load distribution of planetary roller screw mechanism and its improvement approach. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 3304–3318. [Google Scholar] [CrossRef]
- Sandu, S.; Biboulet, N.; Nelias, D.; Abevi, F. Analytical prediction of the geometry of contact ellipses and kinematics in a roller screw versus experimental results. Mech. Mach. Theory 2019, 131, 115–136. [Google Scholar] [CrossRef]
- Aurégan, G.; Fridrici, V.; Kapsa, P.; Rodrigues, F. Wear Behavior of Martensitic Stainless Steel in Rolling-Sliding Contact for Planetary Roller Screw Mechanism: Study of the WC/C Solution. Tribol. Online 2016, 11, 209–217. [Google Scholar] [CrossRef] [Green Version]
- Aurégan, G.; Fridrici, V.; Kapsa, P.; Rodrigues, F. Experimental simulation of rolling–sliding contact for application to planetary roller screw mechanism. Wear 2015, 332–333, 1176–1184. [Google Scholar] [CrossRef]
- Wei, C.-C.; Liou, W.-L.; Lai, R.-S. Wear analysis of the offset type preloaded ball–screw operating at high speed. Wear 2012, 292–293, 111–123. [Google Scholar] [CrossRef]
- Zhou, H.-X.; Zhou, C.-G.; Feng, H.-T.; Ou, Y. Theoretical and experimental analysis of the preload degradation of double-nut ball screws. Precis. Eng. 2020, 65, 72–90. [Google Scholar] [CrossRef]
- Zhou, C.-G.; Zhou, H.-X.; Feng, H.-T. Experimental analysis of the wear coefficient of double-nut ball screws. Wear 2020, 446–447, 203201. [Google Scholar] [CrossRef]
- Zhou, C.-G.; Ou, Y.; Feng, H.-T.; Chen, Z. Investigation of the precision loss for ball screw raceway based on the modified Archard theory. Ind. Lubr. Tribol. 2017, 69, 166–173. [Google Scholar] [CrossRef]
- Liu, J.; Ma, C.; Wang, S. Precision loss modeling method of ball screw pair. Mech. Syst. Signal Process. 2020, 135, 106397. [Google Scholar] [CrossRef]
- Cheng, Q.; Qi, B.; Liu, Z.; Zhang, C.; Xue, D. An accuracy degradation analysis of ball screw mechanism considering time-varying motion and loading working conditions. Mech. Mach. Theory 2019, 134, 1–23. [Google Scholar] [CrossRef]
- Liu, G.; Ma, S.; Fu, X. Planetary Roller Screw Drive: Meshing Principle; Science Press: Beijing, China, 2019. [Google Scholar]
- Jones, M.H.; Velinsky, S.A. Stiffness of the Roller Screw Mechanism by the Direct Method. Mech. Based Des. Struct. Mach. 2014, 42, 17–34. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Screw | Roller | Nut |
|---|---|---|---|---|
| Material | / | GCr15 | GCr15 | GCr15 |
| Hardness of parts (HRC) | H | 56~62 | 56~62 | 56~62 |
| Young moduli (Pa) | E | 2.12 × 1011 | 2.12 × 1011 | 2.12 × 1011 |
| Poisson’s ratio | ν | 0.29 | 0.29 | 0.29 |
| Parameters | Symbols | Screw | Roller | Nut |
|---|---|---|---|---|
| Root diameters(mm) | d1 | 19.96 | 5.92 | 34.16 |
| Nominal diameters(mm) | d0 | 21 | 7 | 35 |
| Outside diameters(mm) | d2 | 21.84 | 7.8 | 35.96 |
| External diameters (mm) | D1 | / | / | 45 |
| Half of thread tooth thickness (mm) | ci | 0.45 | 0.45 | 0.54 |
| Flank angle (rad) | βi | 0.7854 | 0.7854 | 0.7854 |
| Helix angle(rad) | λi | 0.1504 | 0.0907 | 0.0907 |
| Number of starts | ni | 5 | 1 | 5 |
| Pitch (mm) | pi | 2 | 2 | 2 |
| Number of rollers | / | 10 | / | |
| Total number of a roller thread teeth | / | 20 | / | |
| Effective stroke (mm) | Ls | 100 | / | / |
| Parameters | Symbols | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|---|
| Misalignment angle errors in x direction (arcmin) | θsx | 1 | 0 | 1 | 1 |
| Misalignment angle errors in y direction (arcmin) | θsy | 0 | 1 | 1 | 1 |
| Misalignment vector errors(mm) | ε | [0, 0, 0] | [0, 0, 0] | [0, 0, 0] | [0.01, 0.01, 0.01] |
| Symbols | A−3 | A−2 | A−1 | A0 | A2 | A2 | A3 |
|---|---|---|---|---|---|---|---|
| misalignment errors | (−3, −3) | (−2, −2) | (−1, −1) | (0, 0) | (1, 1) | (2, 2) | (3, 3) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, J.; Du, X.; Zhao, X.; Zheng, J.; Wang, D.; Wan, L. Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments. Lubricants 2022, 10, 115. https://doi.org/10.3390/lubricants10060115
Meng J, Du X, Zhao X, Zheng J, Wang D, Wan L. Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments. Lubricants. 2022; 10(6):115. https://doi.org/10.3390/lubricants10060115
Chicago/Turabian StyleMeng, Junjie, Xing Du, Xin Zhao, Junwei Zheng, Dingwei Wang, and Long Wan. 2022. "Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments" Lubricants 10, no. 6: 115. https://doi.org/10.3390/lubricants10060115
APA StyleMeng, J., Du, X., Zhao, X., Zheng, J., Wang, D., & Wan, L. (2022). Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments. Lubricants, 10(6), 115. https://doi.org/10.3390/lubricants10060115