1. Introduction
As a unique type of aerial vehicle that combines the operational characteristics of both fixed-wing airplanes and helicopters, the tiltrotor aircraft has been a hot research point in recent years. On one hand, traditional helicopters are constrained by the compressibility of the advancing rotor blade and the flow separation on the retreating rotor blade, which typically restrict their maximum cruising speed. On the other hand, runways are necessary for the wheeled takeoff and landing of fixed-wing aircraft, imposing stringent infrastructure demands and limiting operational flexibility in certain environments. The tiltrotor aircraft, however, integrates the vertical takeoff, landing capabilities, and hovering proficiency inherent to helicopters with the high-speed cruising efficiency characteristic of turboprop airplanes. This advantage endows tiltrotor aircraft with extended endurance, lower costs, and enhanced maneuverability compared to conventional helicopters, which makes it highly promising for addressing future urban air transportation needs [
1,
2,
3].
Tiltrotor aircraft operate in three distinct flight modes: airplane mode, tilt-transition mode, and helicopter mode [
4]. Each wing is equipped with a rotor nacelle system rotating between 0 and 90 degrees, so that the seamless transitions between helicopter and airplane modes can be achieved [
2]. During the tilt-transition stage, the nacelles gradually rotate towards the direction of flight, shifting the rotor thrust vector from providing vertical lift to generating forward thrust, thereby broadening the aircraft flight envelope [
5]. Despite the benefits, some challenges, such as the high-order dynamics of the control model, strong nonlinearities, and severe control coupling, render traditional flight control methods insufficient for achieving stable control across the full flight envelope for tiltrotor aircraft [
6,
7], which promotes the research in this paper.
An accurate mathematical model of flight dynamics is crucial for the design of effective flight controllers. Therefore, extensive research has been conducted on the modeling of tiltrotor aircraft. Su et al. considered the dynamic characteristics of multiple tilting rotors and their gyroscopic and inertial coupling effects, established a comprehensive nonlinear rigid body dynamic model, and linearized it into a linear parameter variation (LPV) model [
8]. Tischler et al. analyzed flight test data in the frequency domain to derive the transfer function of the tiltrotor model, which no longer required restrictive assumptions on model order or structure [
9,
10]. Liang et al. adopted a sub-component modeling method by separating the tiltrotor UAV into tilting and non-tilting parts and established their aerodynamic models, respectively [
11]. Juhasz et al. further refined rotorcraft modeling by decoupling rigid-body and structural states, which were validated by using XV-15 and large civil tiltrotor platforms [
12]. Distinct from the prior efforts that primarily focused on flight dynamics modeling and handling quality assessment, Lu et al. proposed a linear combination mode synthesis modeling approach that reflected stability derivatives throughout three operational modes to unify tiltrotor behaviors [
13]. Despite these advancements, the complex interactions among key components, such as the fuselage, wings, tail, rotors, as well as their effects on overall flight dynamics, remain insufficiently detailed, indicating an urgent need for further research in this area.
With the continuous exploration of modern control theory and the refinement of tiltrotor aircraft mathematical models, more reliable controllers, such as incremental nonlinear dynamic inversion control [
14], constrained optimal control [
15], comprehensive robust control [
16], active disturbance rejection control [
17], model predictive control [
18], and sliding mode control [
19], have been developed to address the challenges of tiltrotor flight control. In addition, some emerging and widely adopted strategies, such as state-filtered disturbance rejection control [
20] and multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection [
21], have also shown promising results in handling complex control problems. While these approaches have achieved flight control in a certain flight mode, they still lack sufficient adaptability and robustness for fine-tuning in the presence of transient effects and cross-mode nonlinear coupling, which arise from the nonlinear dynamic characteristics, time-varying parameter characteristics, and aerodynamic coupling effects during the tilt-transition mode. It should be noted that model reference adaptive control (MRAC) has emerged as an effective method for addressing nonlinear challenges due to its strong adaptability and robustness. In recent years, a number of MRAC-based schemes tailored for tiltrotor aircraft have been proposed. For instance, Liu et al. designed the radial-basis function (RBF) neural network and offline adaptation method to address the nonlinear problems in the control of a quad-tiltrotor UAV [
22]. Wen et al. developed a hybrid adaptive control to address the actuator faults that occur during flight [
23]. Shen et al. proposed a finite-time convergent sliding mode control based on an adaptive neural network extended state observer, which significantly improved disturbance rejection in tiltrotor UAVs [
24]. These advancements highlight the ongoing efforts to enhance adaptability and robustness in tiltrotor flight control.
However, as the flight control requirement becomes increasingly complex, traditional integer-order control methods have shown their limitations due to the lack of flexible and refined parameter tuning capabilities. In contrast, FOC provides additional degrees of freedom for the controller by introducing fractional-order operators and taking advantage of their nonlocality and long memory characteristics. This characteristic enables FOC to achieve refined compensation for nonlinear transient processes by dynamically adjusting the historical state weights, thereby significantly improving the tracking accuracy and robustness during cross-mode dynamic transitions. In recent years, fractional-order control has emerged as a noteworthy approach. Lu et al. proposed a fractional-order sliding mode control strategy augmented with a disturbance observer, which exploited the memory-dependent properties of fractional calculus to achieve stable speed regulation of electromechanical systems [
25]. Similarly, Zhang et al. constructed an electrospring model and introduced a fuzzy adaptive fractional-order controller, effectively improving the accuracy of the model and the robustness and adaptive ability of the control system [
26]. Investigating the work above, fractional-order control is potentially suitable for tiltrotor aircraft flight control throughout all flight modes. Considering the rare application of FO-MRAC to tiltrotor aircraft, this paper conducts this research.
In this paper, by investigating the character of the unique aerodynamic modeling of the tiltrotor aircraft, a FO-MRAC is proposed for full-mode flight. Based on data from NASA research [
27], a rigid-body model in the vertical plane is developed that is validated under open-loop configurations to ensure accuracy. Subsequently, the developed nonlinear model is used to calculate stable flight conditions so that the flight envelope can be determined. Then, model linearization is performed at certain stable points for controller design. To enhance parameter tuning ability during the full-mode flight, an FO-MRAC method applied with a fractional-order component is proposed for the flight control of the tiltrotor aircraft. Additionally, the simulations are conducted to verify the effectiveness of the fractional-order adaptive controller during the tilt-transition process within the stable flight envelope, which is also validated comprehensively by a hardware-in-the-loop platform.
The rest of this paper is organized as follows. In
Section 2, the motion characteristic is investigated to establish the controlled model. In
Section 3, trim analysis and stability characterization are discussed based on the constructed model. In
Section 4, the design of the attitude control system based on FO-MRAC is presented. In
Section 5, the simulations and experiments are conducted to demonstrate the effectiveness of the proposed control method. Finally, this paper is summarized in
Section 6.
3. Trimming and Steady-State Analysis
In tilt-transition mode, the tiltrotor aircraft experiences continuous variations in nacelle tilt angle and flight velocity, which lead to significant nonlinear coupling between rotor aerodynamics and body-axis force components. Additionally, the aerodynamic forces acting on the body change drastically, influencing the flight states of tiltrotor aircraft. Thus, these dynamic interactions necessitate a rigorous steady-state analysis to quantify equilibrium conditions throughout the transition corridor.
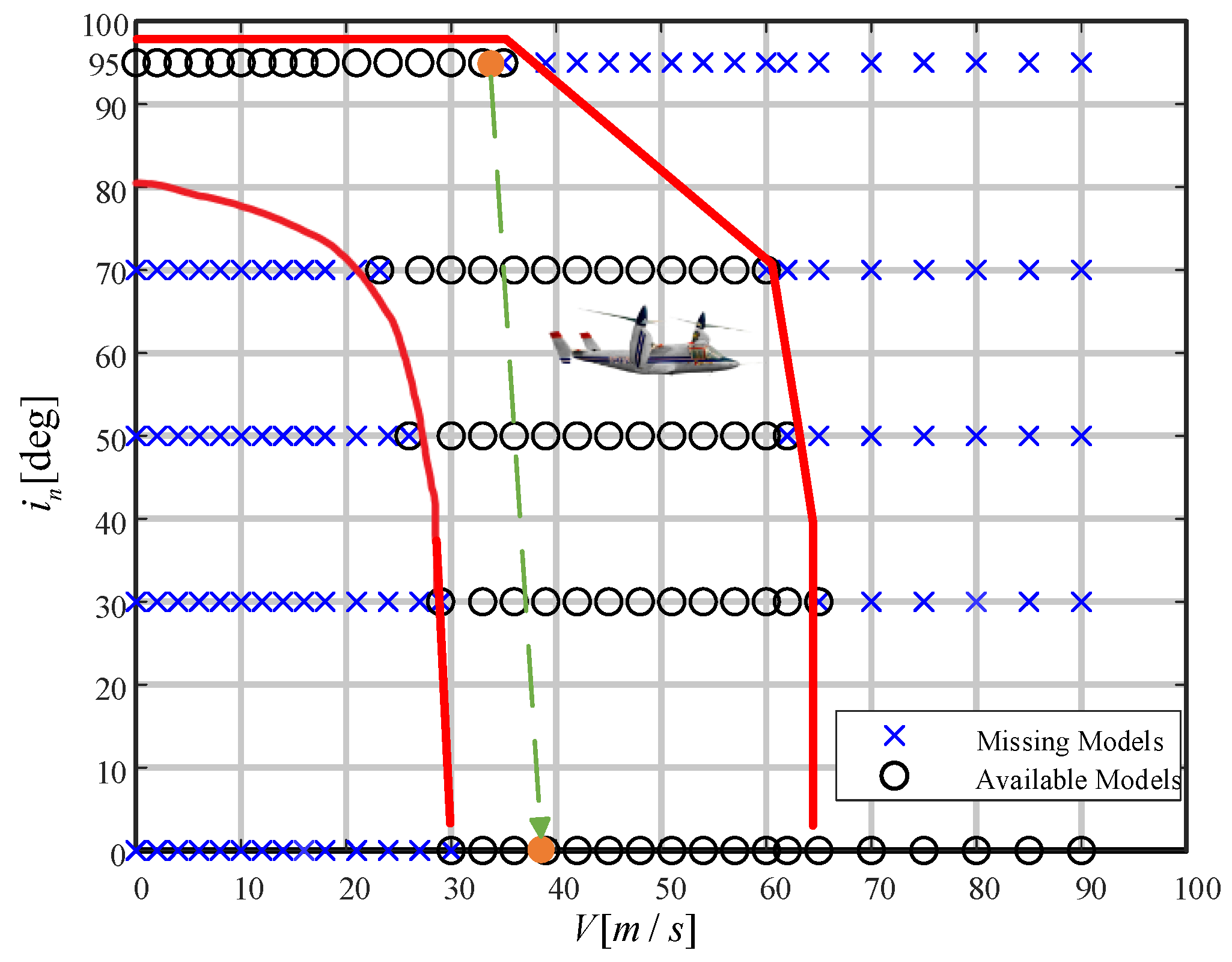
During the transition phase of flight, the vertical velocity of the aircraft remains relatively low, while its horizontal velocity is higher. At this stage, the thrust generated by the rotor becomes the primary source of both speed and lift. Therefore, the angle of attack and the nacelle angle play a critical role in aircraft control. As the flight speed increases, the aerodynamic forces and moments acting on the fuselage also increase. Since the angle of attack directly influences these aerodynamic forces and moments, it is essential to control the angle of attack precisely when the aerodynamic force is the main source of lift. To mitigate transient disturbances during trimming, the angle of attack is constrained to 0°. Subsequently, different nacelle angles and rotor-generated lift values are selected to trim the tiltrotor aircraft. The resulting trim points are shown in
Table 1, and the equilibrium points satisfy the following equation:
where
represents the trimmed state vector, and
represents the trimmed control vector. The validated trim points demonstrate monotonic convergence across the transition envelope.
The data from the table indicate that when
, the aircraft achieves hovering equilibrium with
and
, which is consistent with rotor-dominated vertical thrust. The data are used to construct a two-dimensional grid map that quantitatively relates flight speed to nacelle tilt angle, as illustrated in
Figure 7. Additionally, the grid points outside the transition corridor represent trimmed states at extreme velocities. The monotonic convergence of trim points across
provides critical reference states for controller synthesis, particularly in addressing hybrid aerodynamic dominance during mode transitions.
4. Design of the Controller
In this paper, the equilibrium states tabulated in
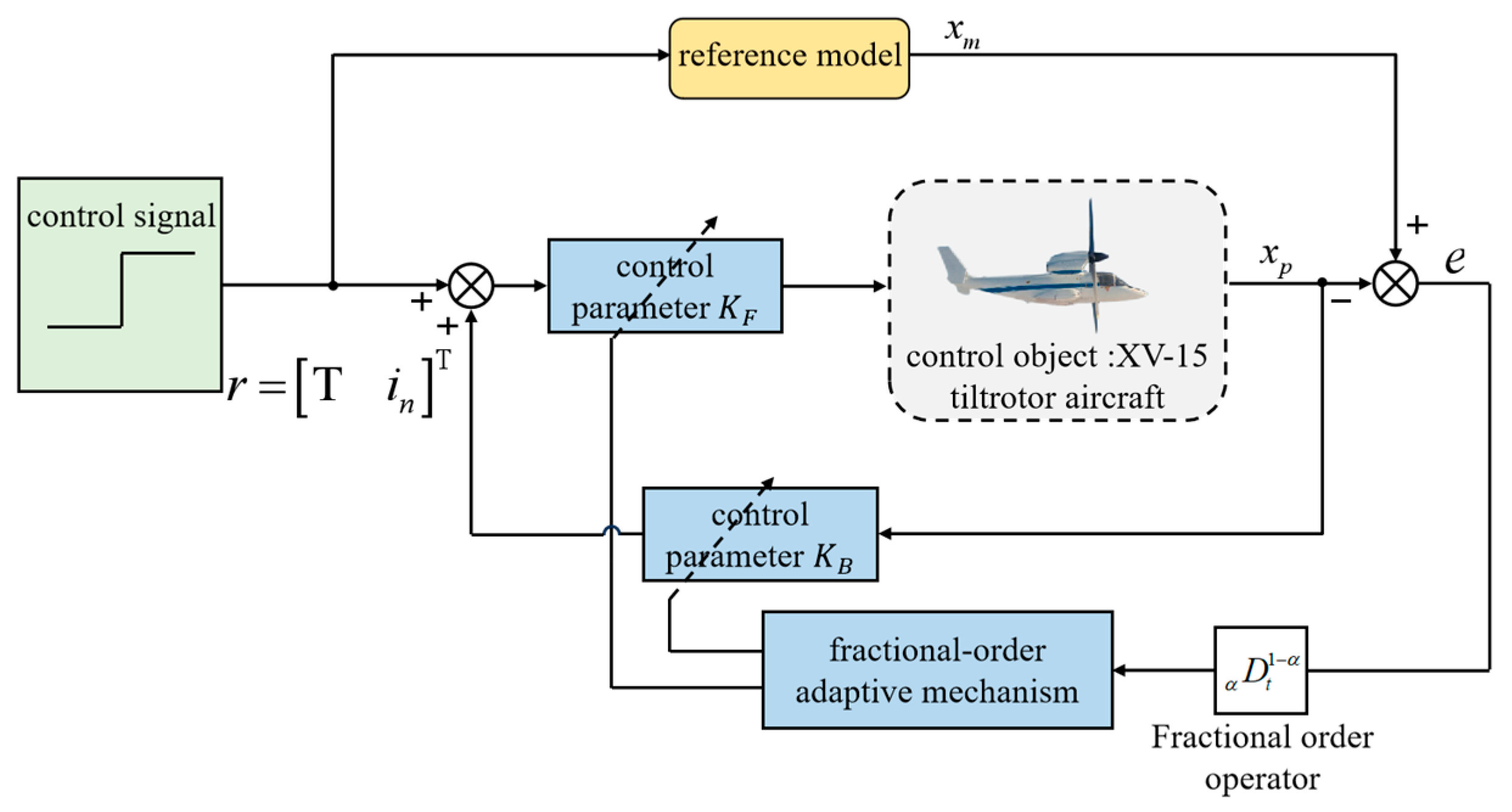
Table 1 are identified as linearization baselines, and a fractional-order control strategy is proposed for the tiltrotor aircraft, as illustrated in
Figure 8. The control input
is processed through a feedforward gain matrix
to generate an initial control signal. Subsequently, the plant output
is compared with the reference model output
, generating a tracking error
, which is modulated by a fractional-order operator and adjusted via feedback gain.
At the equilibrium points
, the nonlinear dynamics are linearized as
where
,
,
,
, and
. To address residual nonlinearities
, a corrective
function is introduced, and the equation can be further rewritten as [
33]
where
,
, and
. The reference model for the FO-MRAC system is formulated as
where
,
, and
are system matrices with
,
. The state tracking error is defined as
To ensure effective tracking, the control law is designed as
where
represents the feedforward gain matrix, and
represents the feedback gain matrix, acting as the bridge between the adaptive mechanism and the control law. Based on prior Equations (19) and (20), the state equation of the tracking error can be further derived as
Assuming the reference model and system satisfy the completely matchable condition [
34], there exist matrices
and
such that
and
. Substituting the matrices into the error dynamics Equation (23), we obtain
where
,
, and
denote the parameter adaptation errors. To analyze the stability of the closed-loop system, the Lyapunov function is constructed as
where
,
,
, and
are parameters to be designed. Furthermore, the operator
is the trace operation if
. Taking the fractional-order time derivative of
, the system stability conditions can be further evaluated:
According to Equation (24), the derivation can be continued as follows:
The adaptation laws are defined as
Since
is a positive-definite matrix, there exist positive-definite matrices
and
such that
, and thus,
[
35]. The above-mentioned adaptation laws can ensure that the fractional-order closed-loop system is globally asymptotically stable. The parameter adaptation laws are formulated as
In terms of Equation (29) and
, the parameter
can be obtained as
According to Equations (22), (29) and (30), the adaptive controller is obtained as
When there are disturbances in the parameters, assume the external disturbance
satisfies
, and consider the following modified adaptation law:
which is also applicable to
, and the auxiliary Lyapunov function is introduced later.
where
is the original Lyapunov function. Take the derivative of
and substitute
:
According to the complete-square inequality, the
can be further rewritten as
This shows that
is bounded. Furthermore, combined with Barbalat’s lemma [
36], we have
5. Hardware-in-the-Loop Validation
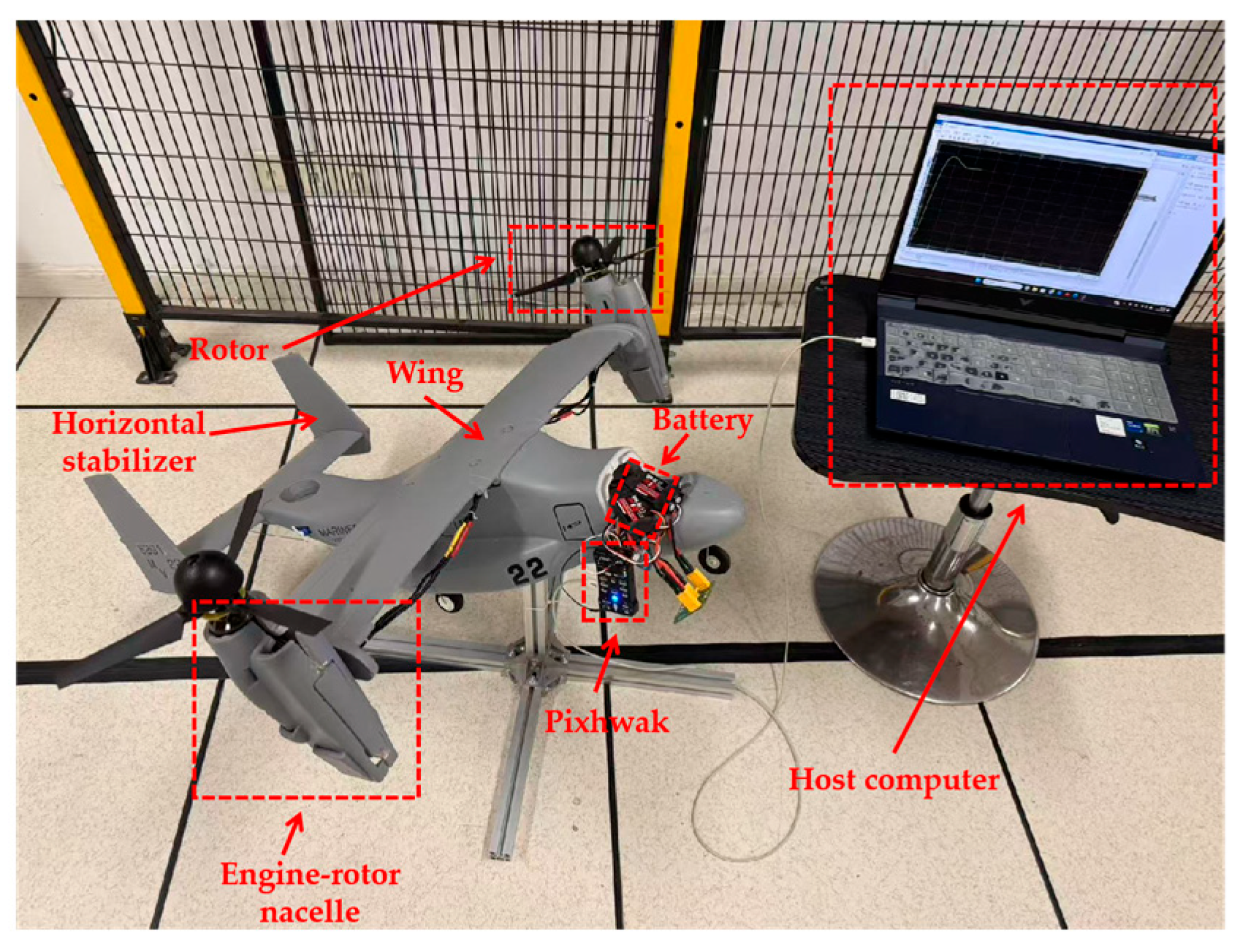
To validate the effectiveness of the control law, a hardware-in-the-loop (HIL) platform is established. We simulated the model of the tilting rotor aircraft with a fixed time step on the PC to ensure its high fidelity. The simulation system realizes two-way communication with the Pixhawk flight control hardware through the MAVLink HIL protocol, ports 14540/14550, and a message frequency of 200 Hz, ensuring strict time synchronization between the controller and the simulation model. The PX4 firmware integrates a sensor simulation module internally, including a barometer, magnetometer, and gyroscope, etc., enabling Pixhawk to receive perception data consistent with those of actual aircraft. The actuator commands output by Pixhawk are received by Simulink and sent to the control plane or motor via the serial port, forming a complete feedback loop. Flight control laws are deployed to Pixhawk via PX4 firmware for real-time operation.
Figure 9 and
Figure 10 clearly show the closed-loop structure, USB communication path, MAVLink protocol interface, and sensor and actuator simulation module, thereby more clearly demonstrating the structural integrity and modeling fidelity of the HIL system.
To conduct the validation, the transition process is designed by selecting two stable flight states within the operational envelope of the tiltrotor aircraft, as depicted in
Figure 11. As shown in
Figure 11, the transition maneuver is simulated starting from an initial state of
and reaching a final state of
.
5.1. Flight States Verification of the Integer-Order System at a Single Stable Point
To demonstrate that the tiltrotor aircraft states do not converge effectively under a uniform set of control parameters, we choose two states,
and
. Two distinct control parameters are provided in
Table 2 and
Table 3, respectively.
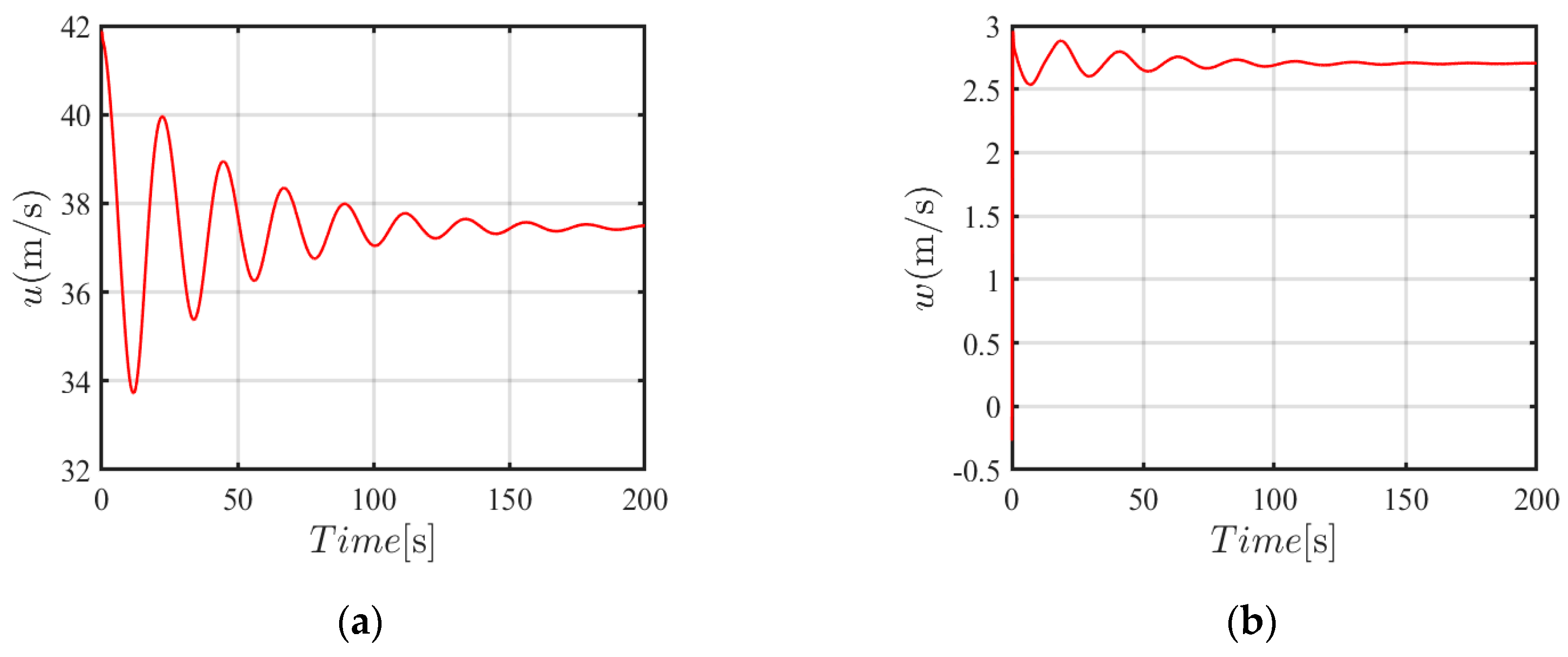
As shown in
Figure 12, under the initial flight condition, the dynamic response of a step input signal was achieved by using the first set of control parameters. Specifically, the responses of the horizontal speed, the vertical velocity, the pitch angular velocity, and the pitch angle are depicted in
Figure 12a–d, respectively. As shown in
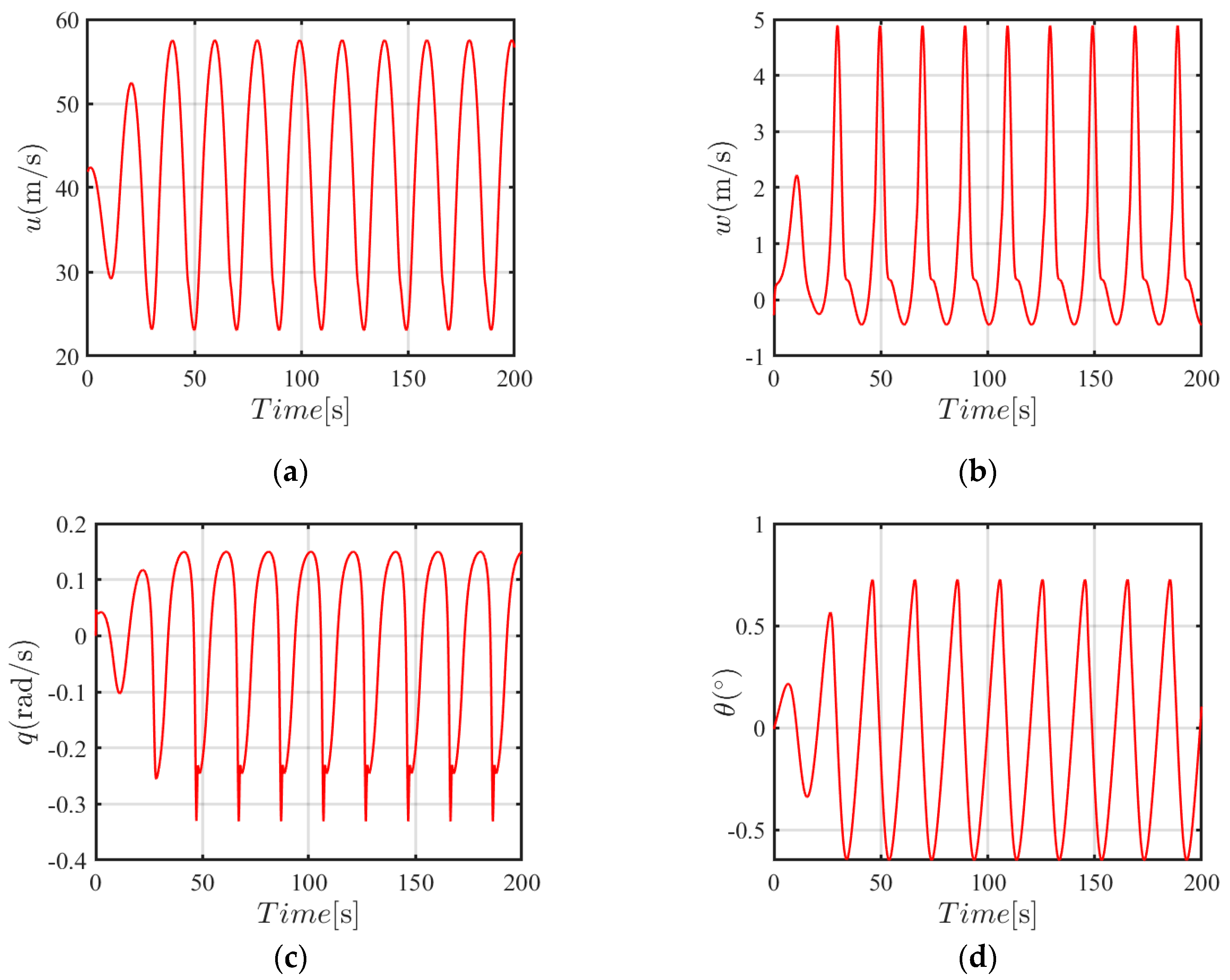
Figure 12, the closed-loop system is stable under the initial flight condition. Furthermore, the response of a step input signal under the final condition is shown in
Figure 13. As shown in
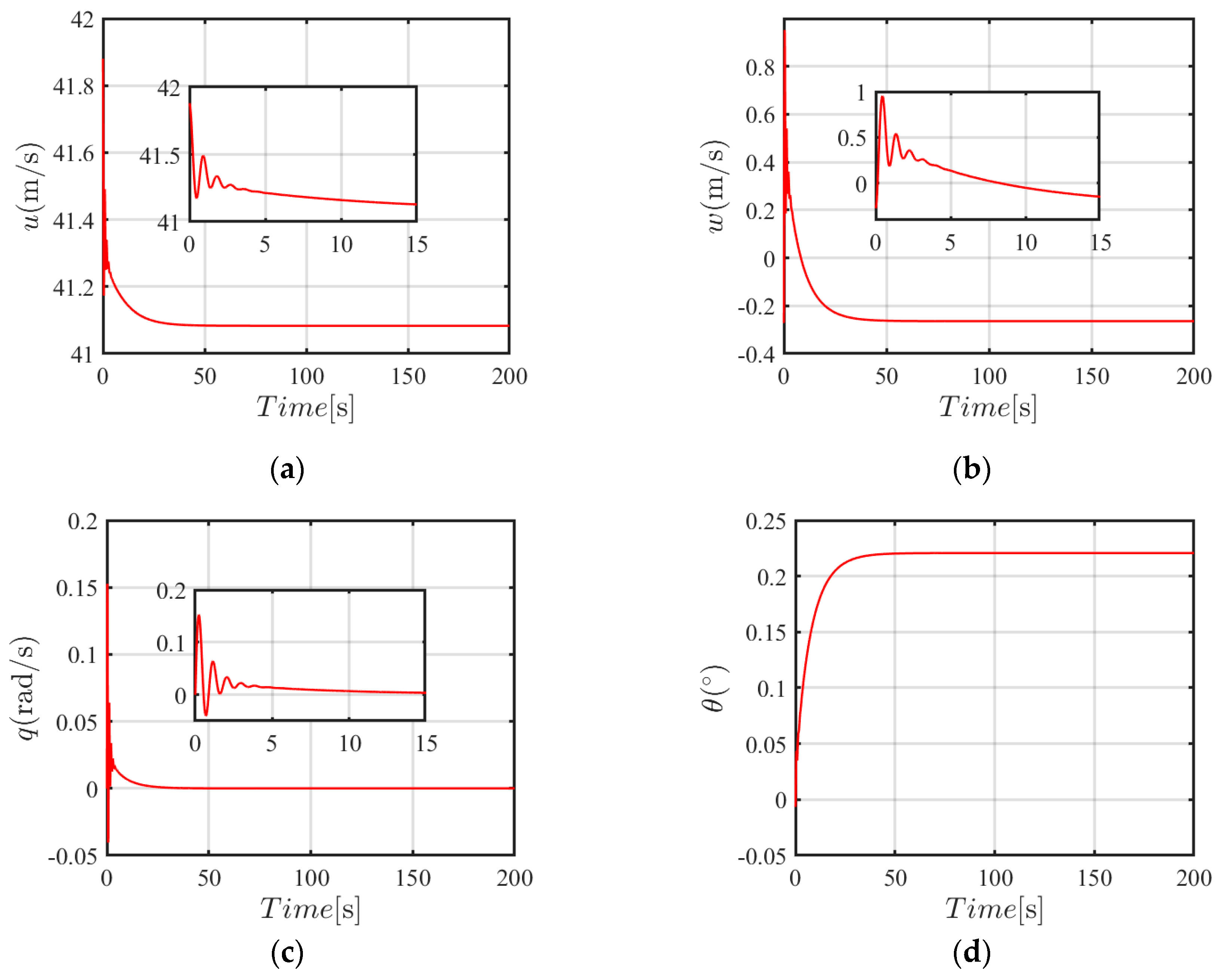
Figure 13, the closed-loop system is unstable under the final condition. Such an unstable phenomenon could be attributed to parameter mismatches or insufficient gain tuning in the controller design under the initial flight condition, which cannot meet the control requirement in the later stages of flight. To address this limitation, a second group of control parameters was developed through re-tuning the controller gains in terms of Equation (30). The dynamic response under the re-tuning of the controller gains is shown in
Figure 14. As shown in
Figure 14, the stability of the closed-loop system is achieved either under the initial flight condition or under the final condition, which confirms the effectiveness of the proposed gain tuning regulation (30).
5.2. Verification of Tiltrotor Aircraft Transition Process
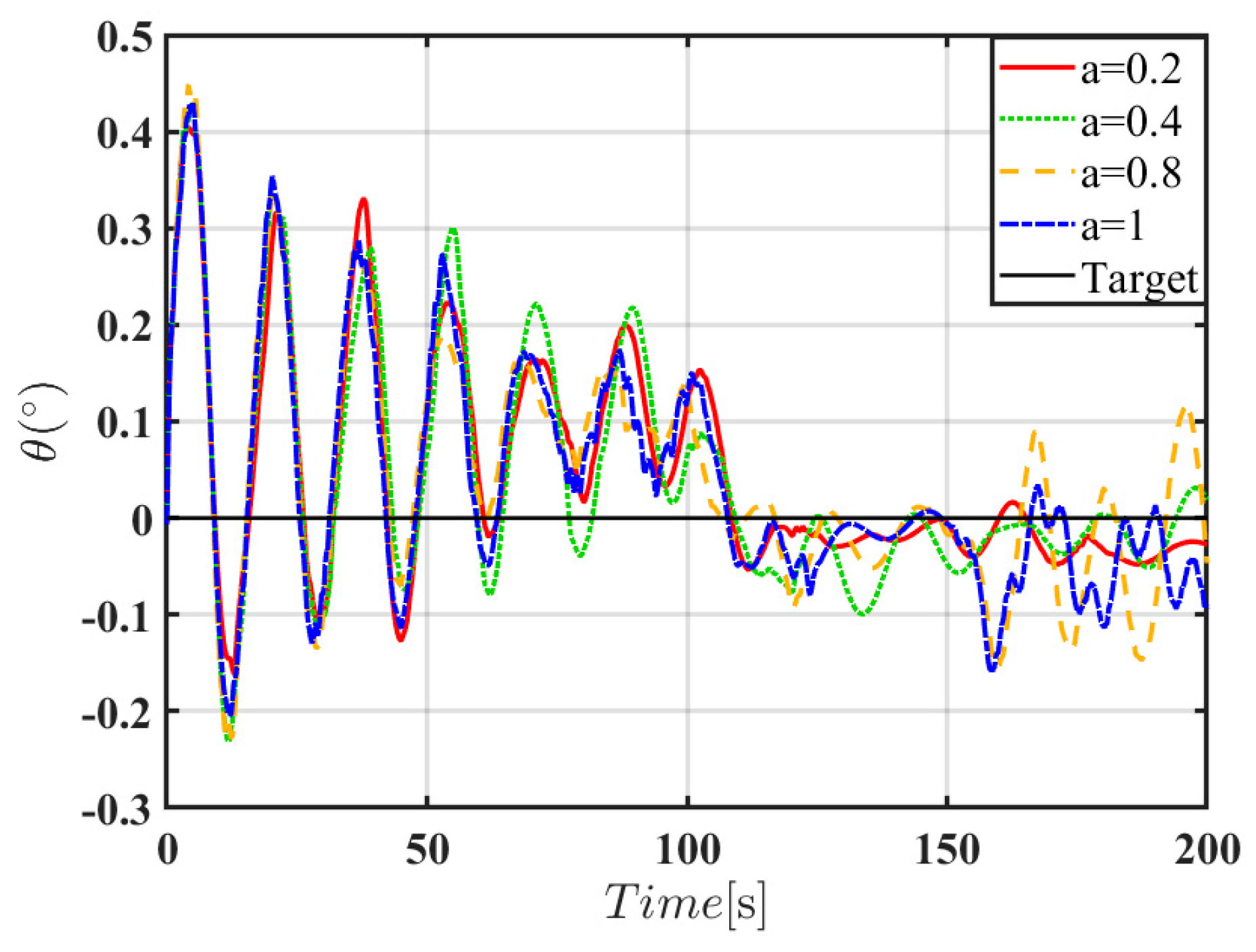
FO-MRAC has been developed to ensure a smooth transition between the two states. In order to verify how to select the appropriate fractional order , the pitch angle is taken as the research object to study the influence on the error size under different fractional orders. Select different fractional orders: , , , .
As shown in
Figure 15, when the fractional-order exponent is
, selecting a fractional-order exponent can reduce the error and enhance the stability. Therefore, an appropriate fractional-order exponent of
is selected. To illustrate the superiority of the proposed method, the MRAC method and a conventional linear controller (CLM) are also designed with the same parameters.
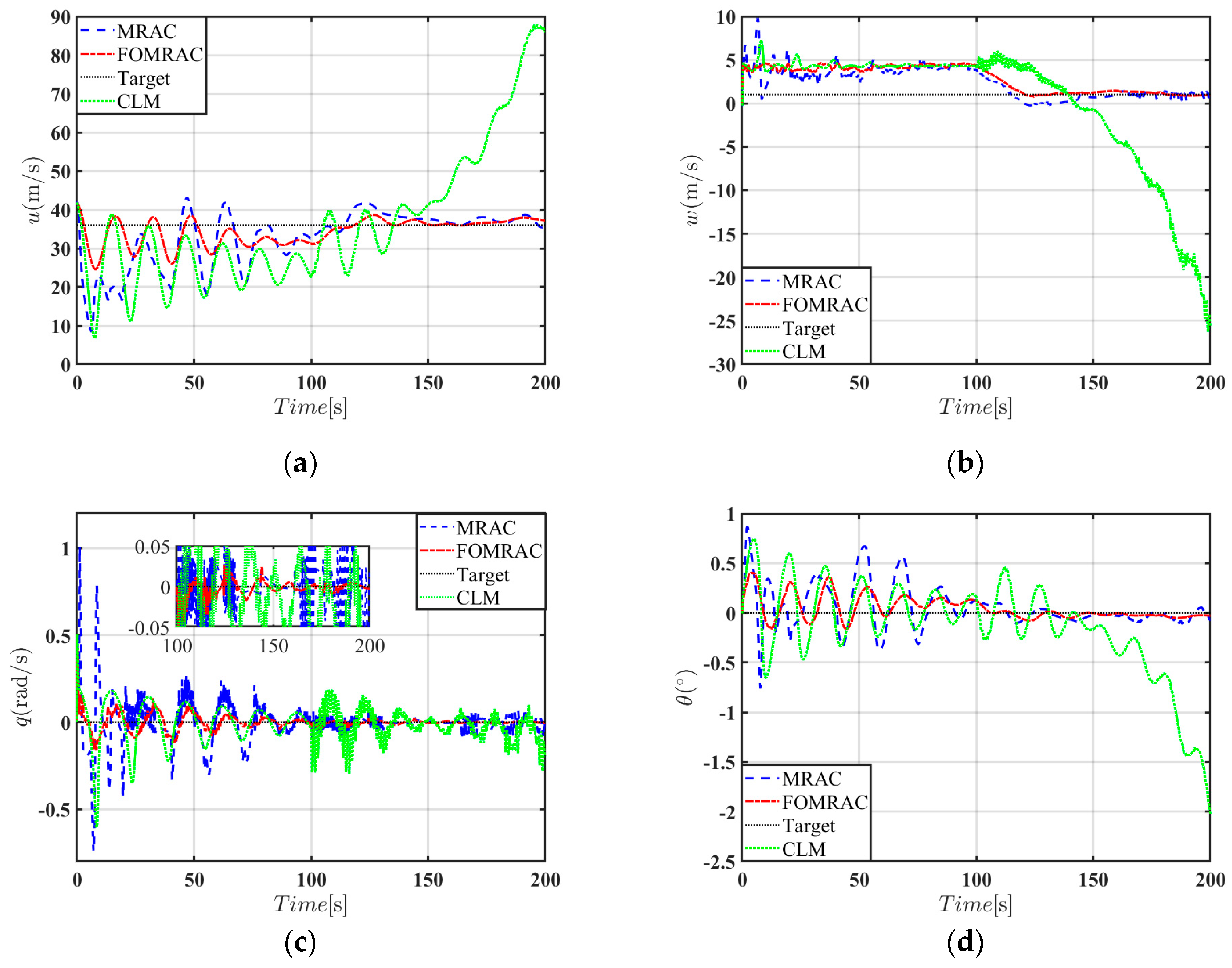
As shown in
Figure 16, the transition process of the tiltrotor aircraft begins at 100 s. The proposed FO-MRAC control method exhibits a notably faster dynamic response, achieving an average regulation time of 18.65 s, compared to 36.92 s for the conventional MRAC. The comparison between the two methods shows that the efficiency has increased by 50.51%. In terms of forward velocity tracking, the disturbance error under integer-order control ranges from 0% to 4.12%, whereas the FO-MRAC reduces this range to 0–1.27%, demonstrating its superior capability in suppressing both overshoot and steady-state error while preserving overall stability. Moreover, the reduced oscillation amplitude during the transition further confirms the enhanced transient performance and steady-state behavior of the FO-MRAC scheme. These quantitative indicators fully verify the robustness and effectiveness of this control strategy in dealing with complex flight state transitions.
6. Conclusions
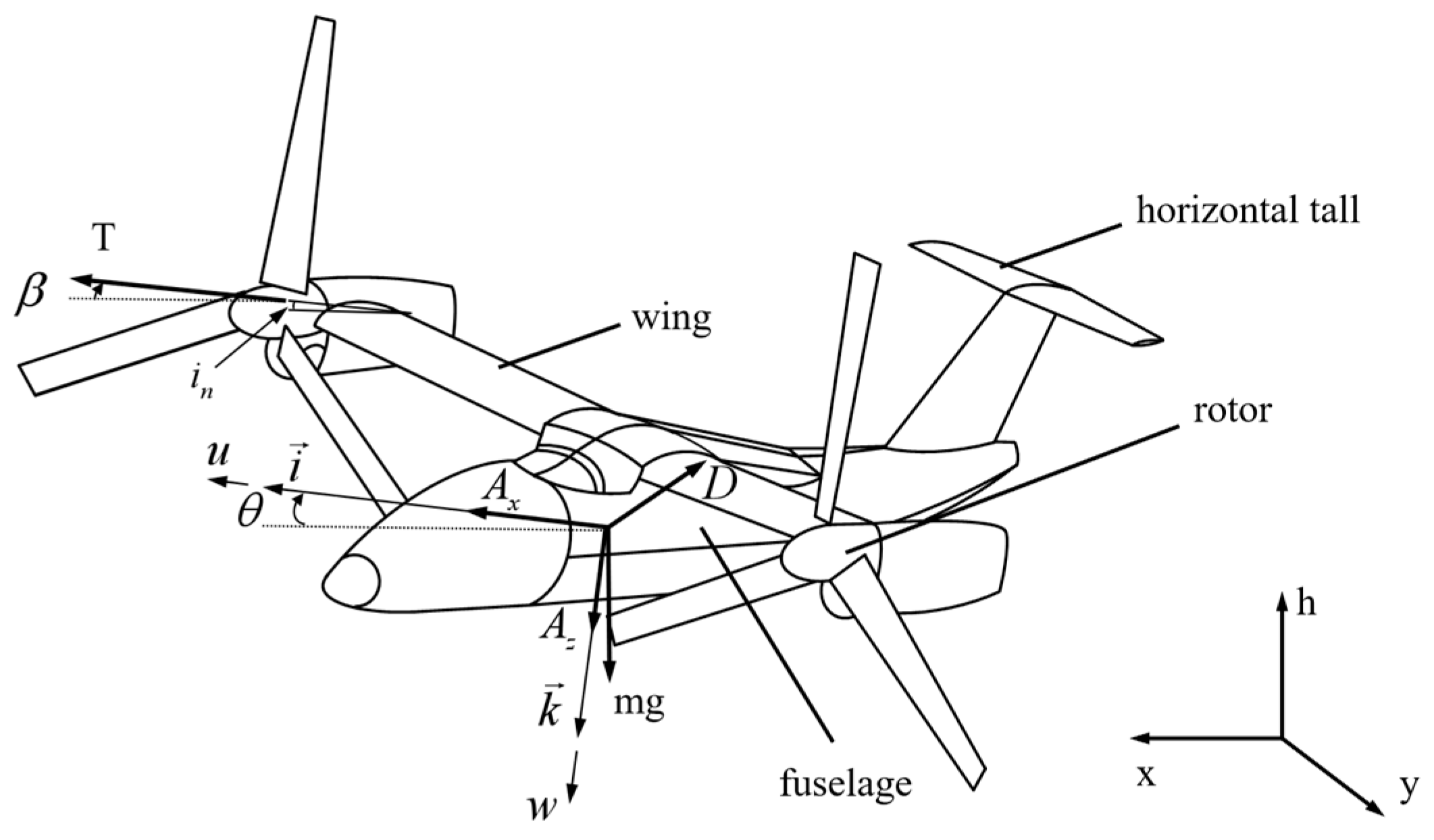
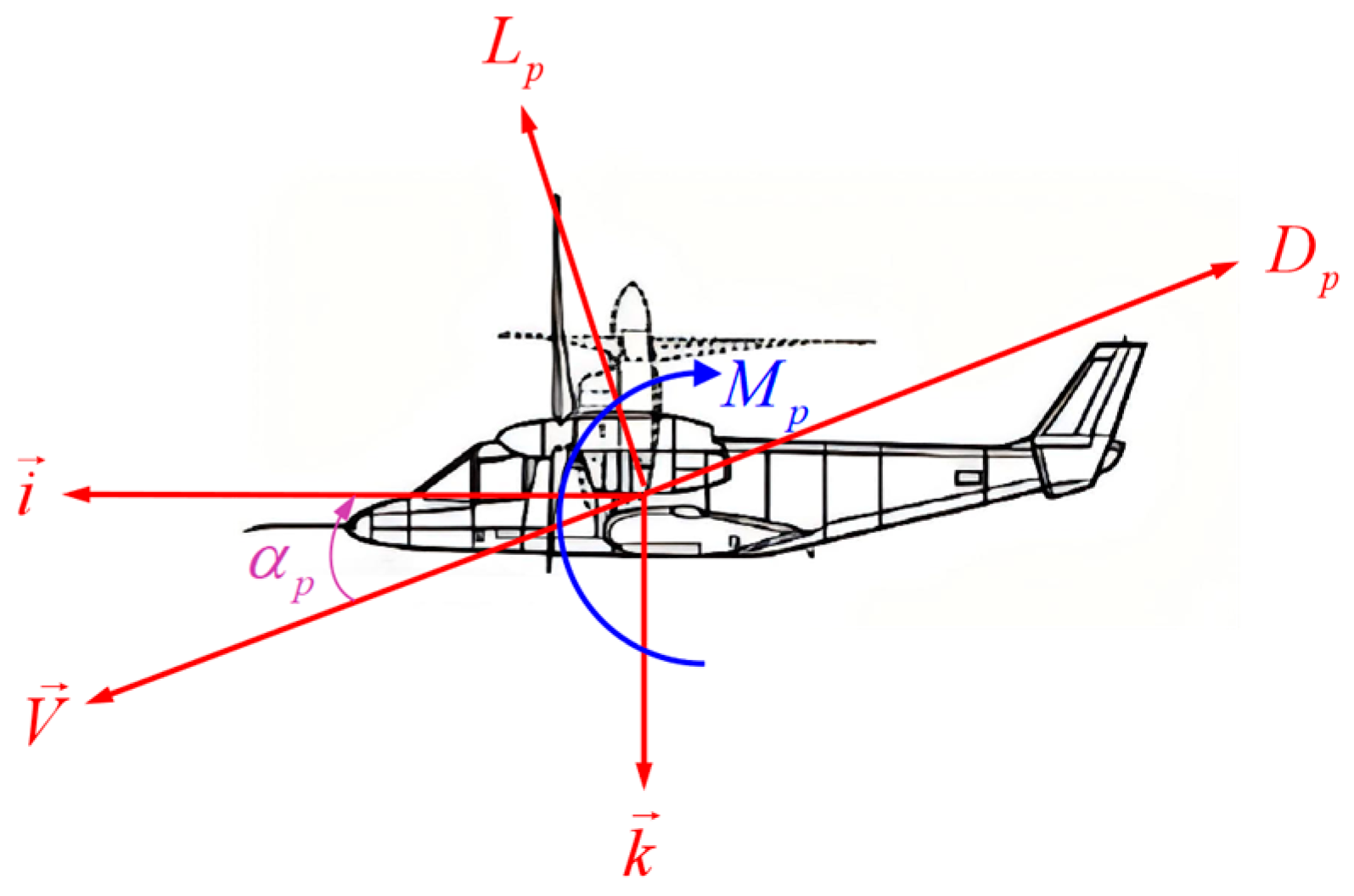
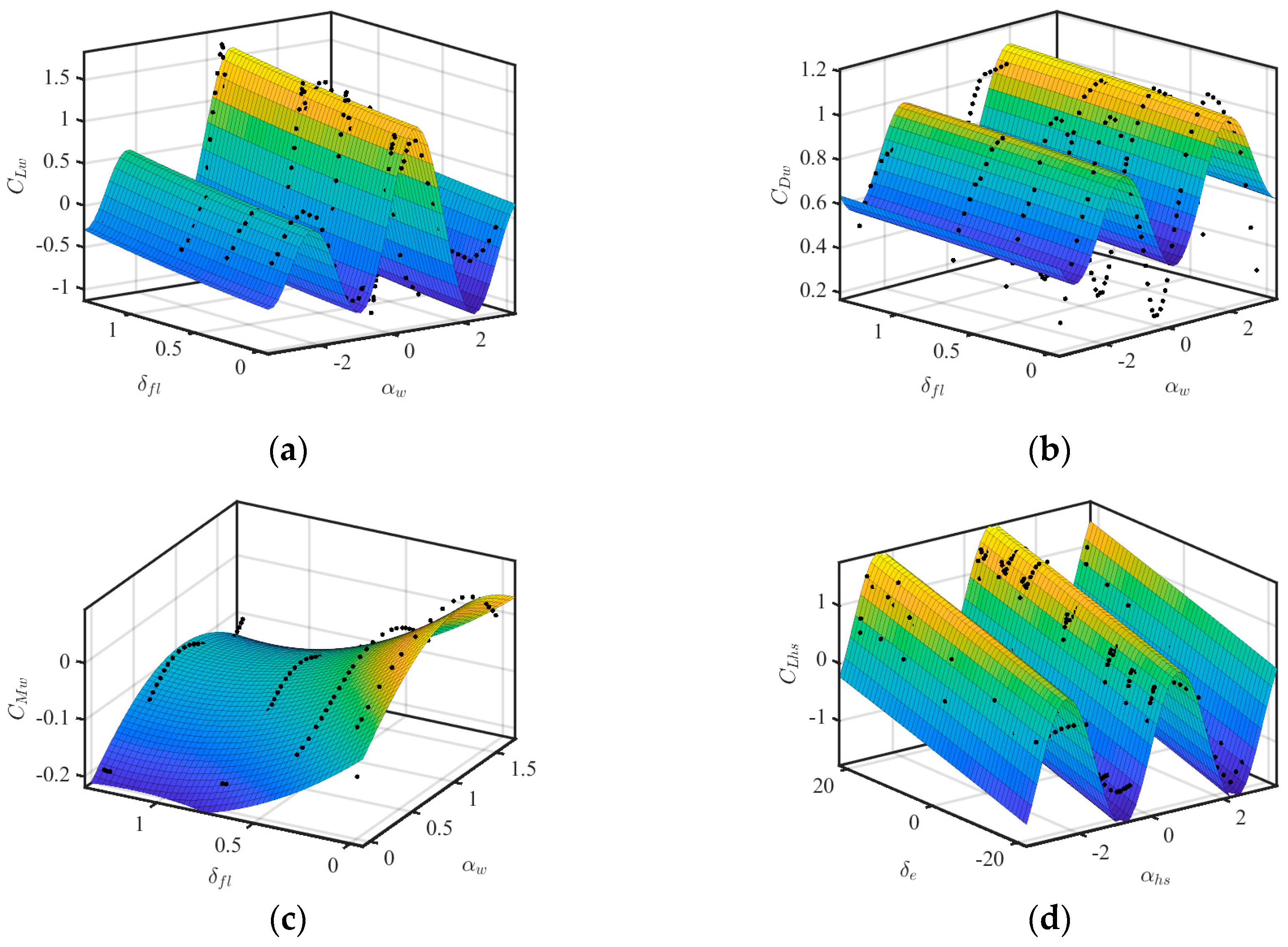
By investigating four key components, such as rotors, wings, fuselage, and horizontal tail, motion models are established to accurately capture the forces and moments acting on these key parts. Based on the models, the nonlinear simulation model is subsequently linearized to obtain the equilibrium points of the aircraft under various flight modes, facilitating the construction of the stable flight envelope. To address the system uncertainties and external disturbances, an FO-MRAC strategy is introduced. Leveraging the flexibility of fractional-order operators, the strategy enables precise parameter tuning and exceptional disturbance rejection capabilities, which ensures favorable flight stability. Considering that the tilting transition process has significant nonlinear and time-varying characteristics, further research will be carried out in the future focusing on the theoretical completeness and engineering practicability of the controller, mainly including factors such as non-modeling dynamics, bounded parameter disturbances, and actuator delays, to conduct research on uncertainty modeling and compensation mechanisms. Combining the state observer or neural network approximation method, a nonlinear full-envelope controller is constructed to adapt to severe flight maneuvers and complex working conditions.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}