
Machine Learning-Based Agoraphilic Navigation Algorithm for Use in Dynamic Environments with a Moving Goal




Abstract
:1. Introduction
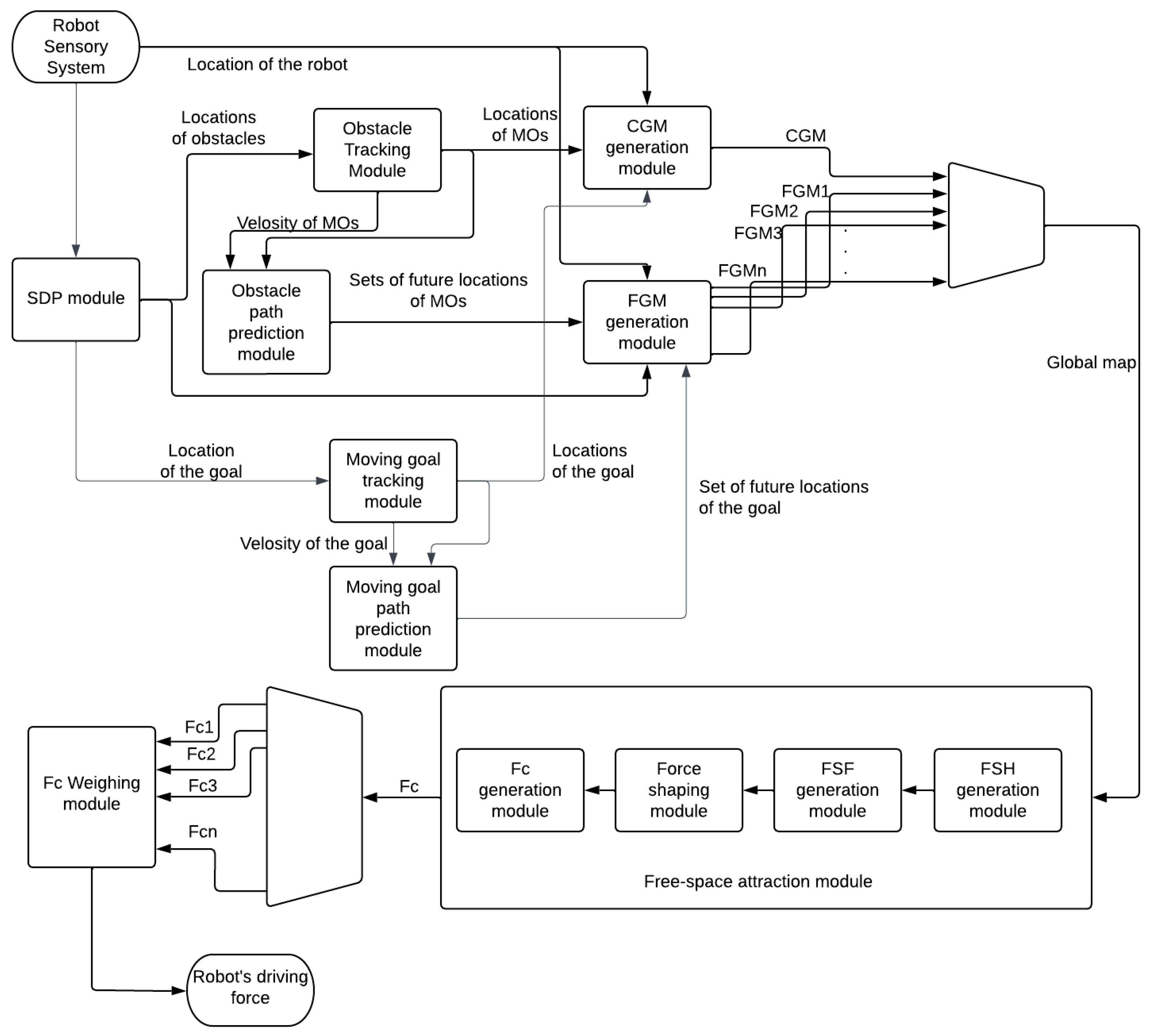
2. Development of the ML-Based Agoraphilic Navigation Algorithm in Dynamic Environment (ANADE)
- Sensory Data Processing (SDP) module;
- Moving goal tracking module;
- Moving goal path prediction module;
- Obstacle tracking module;
- Obstacle path prediction module;
- Current Global Map (CGM) generation module;
- Future Global Map (FGM) generation module;
- Free-space attraction module;
- (a)
- Free-space histogram generation module;
- (b)
- Free-space force generation module;
- (c)
- Force shaping module;
- (d)
- Instantaneous driving force component (Fc) generation module;
- Instantaneous driving force component weighing module.
2.1. Pseudocode of ML-Based ANADE with a Moving Goal
- Step 1: Begin the algorithm.
- Step 2: Collect sensory data and input it into the SDP module.
- Step 3: Input the processed sensory data into the moving goal tracking module.
- Step 4: The moving goal tracking module estimates the location and velocity of the moving goal.
- Step 5: Input the processed sensory data into the obstacle tracking module.
- Step 6: The obstacle tracking module estimates the locations and velocities of moving obstacles.
- Step 7: Using the current location of the goal, the current locations of moving obstacles and static obstacles, CGM generation module generates the Current Global Map (CGM) as shown in Figure 1.
- Step 8: Predict future locations of the goal based on its estimated current location and velocity using the moving goal path prediction module.
- Step 9: Predict future locations of the obstacles based on their estimated current locations and velocities using the obstacle path prediction module.
- Step 10: Generate a set of future global maps (FGMs) using a set of future locations of the goal, sets of future locations of moving obstacles, location of static obstacles and states of the robot, Figure 1.Note: After Step 9 there is one current global map and multiple future global maps. Each of these maps proceeds through Steps 11 to 14, which are the components of free-space attraction module.
- Step 11: Identify the free-space passages in the global map and convert the global map into a free-space histogram.
- Step 12: Convert the generated free-space histogram into a set of free-space forces.
- Step 13: Use the ML-based force shaping module to focus the free-space forces towards the goal.
- Step 14: Feed the set of shaped forces into the instantaneous driving force component generation module. This module produces a single force for the particular global map known as the instantaneous driving force component (Fc,n).
- Step 15: Feed all the instantaneous driving force components (Fc,1, Fc,2, …, Fc,N) into the instantaneous driving force component weighing module to create the instantaneous driving force for the current iteration. This is the robot’s actual driving force.
- Step 16: If the robot has reached the goal, go to Step 17. If not, go back to Step 2.
- Step 17: Stop the algorithm.
2.2. Sensory Data Processing (SDP) Module
2.3. Moving Goal Tracking Module
- where:
- ∼ N(0,R)
- ∼ N(0,Q)
- p error covariancet
- ) estimated position of the moving obstacle
- measured position of the moving obstacle
- acceleration of the moving obstacle.
2.4. Moving Goal Path Prediction Module
- position in x direction
- position in y direction
- T sample period
- n sample number.
2.5. Obstacle Tracking Module
- Positions of moving obstacles;
- Velocity vectors of moving obstacles.
2.6. Obstacle Path Prediction Module
2.7. Current Global Map (CGM) Generation Module
- Locations of static obstacles with respect to the robot’s axes system from the sensory system;
- Current locations of moving obstacles from the moving obstacle tracking module;
- Current location of the goal/target estimated from the goal tracking module;
- Current location of the robot from the sensory system.
2.8. Future Global Map (FGM) Generation Module
- The current location of the robot;
- Sets of future positions of moving obstacles;
- A set of future positions of the goal.
2.9. Free-Space Attraction (FSA) Module
- Free-Space Histogram (FSH) generation module;
- Free-Space Forces (FSF) generation module;
- Force-shaping module;
- Instantaneous driving force component (Fc) generation module.
2.10. Instantaneous Driving Force (IDF) Generation Module
3. Machine Learning (ML) for ANADE Algorithm
- Goal seeking: the goal is in the line of sight of the robot;
- Normal travel: the robot is in an environment with dynamic as well as static obstacles with a reasonable amount of free-space;
- Safe travel: the robot is in a cluttered environment with very limited free-space;
- Right side safe: the robot is in a cluttered environment with limited free-space on the left side of the robot;
- Left side safe: the robot is in a cluttered environment with limited free-space on the right side of the robot.
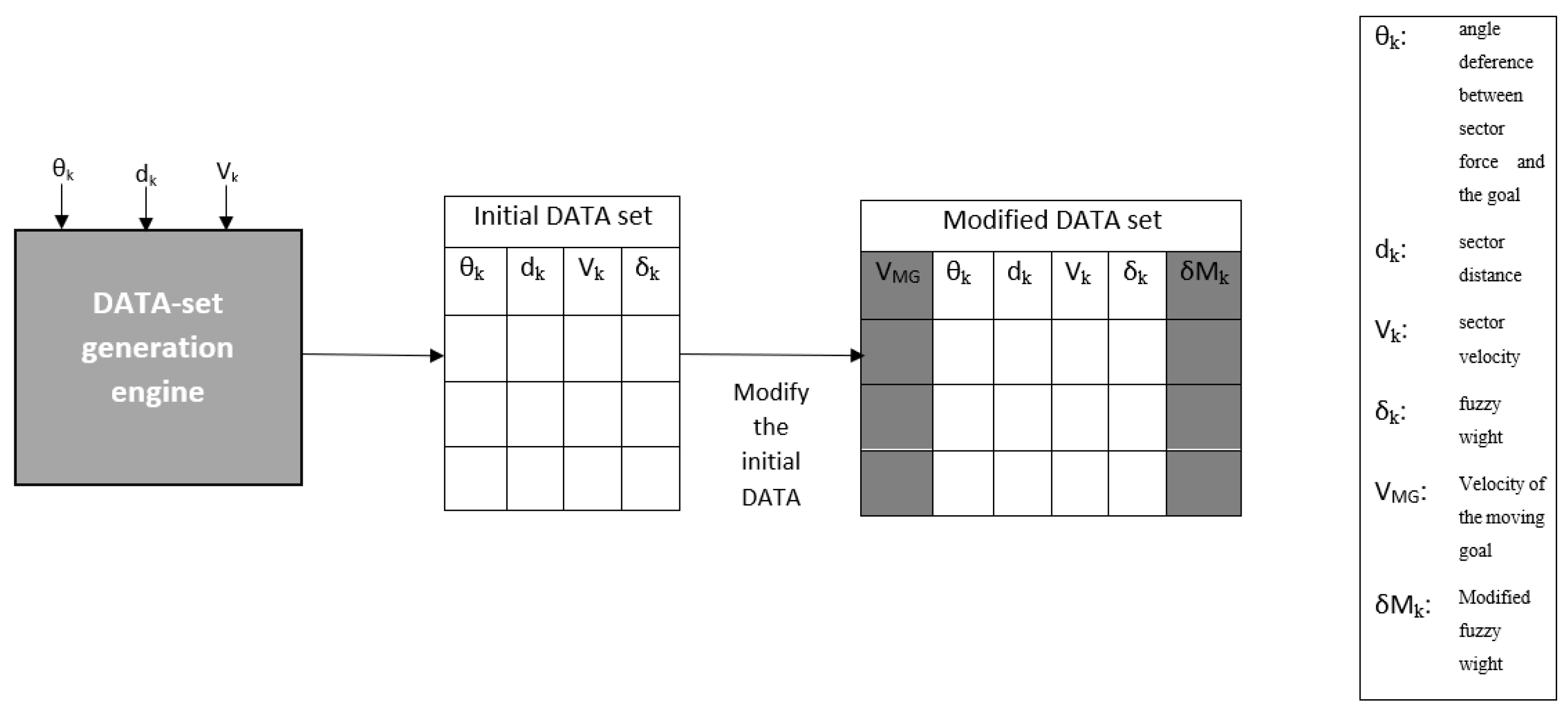
3.1. Training and Testing Datasets Generation
3.2. Datasets for Different Agoraphilic Behaviors
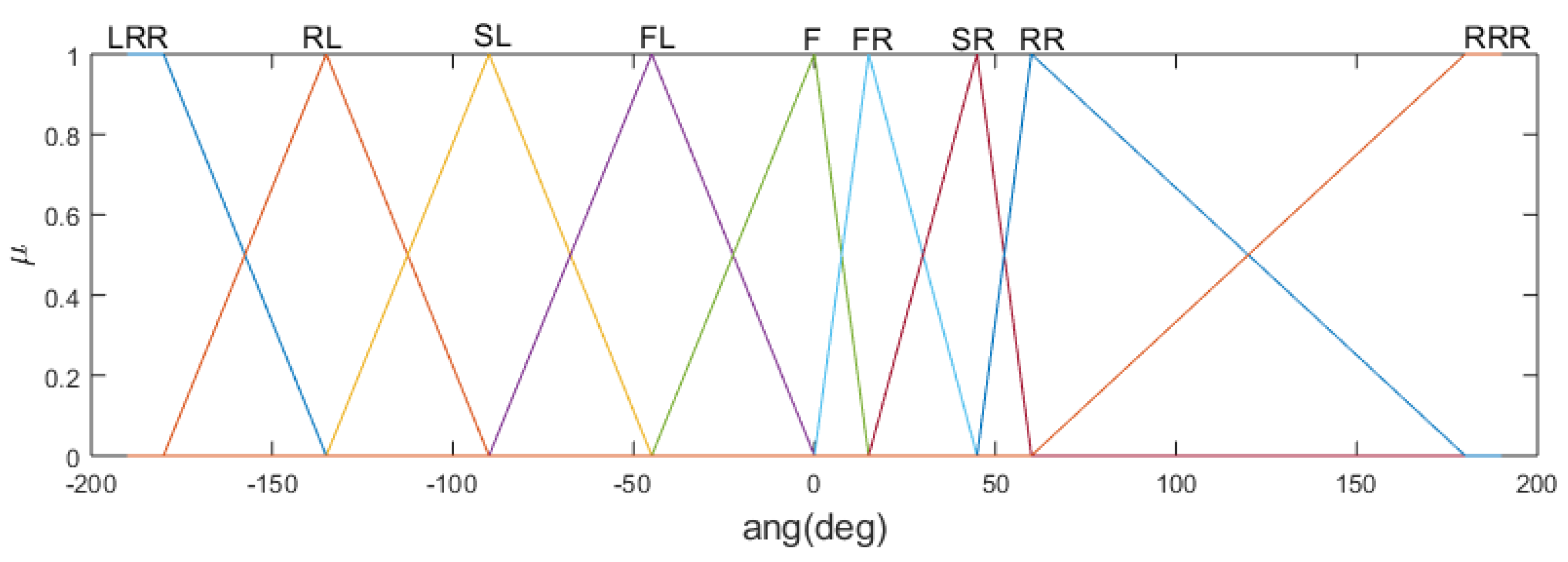
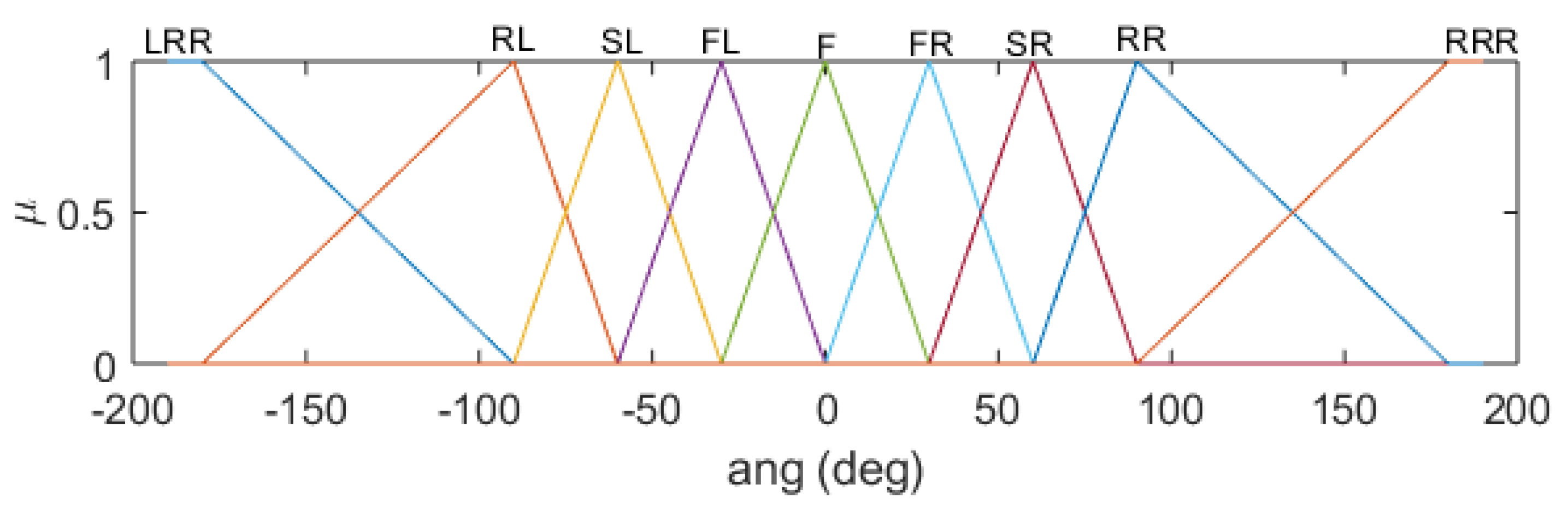
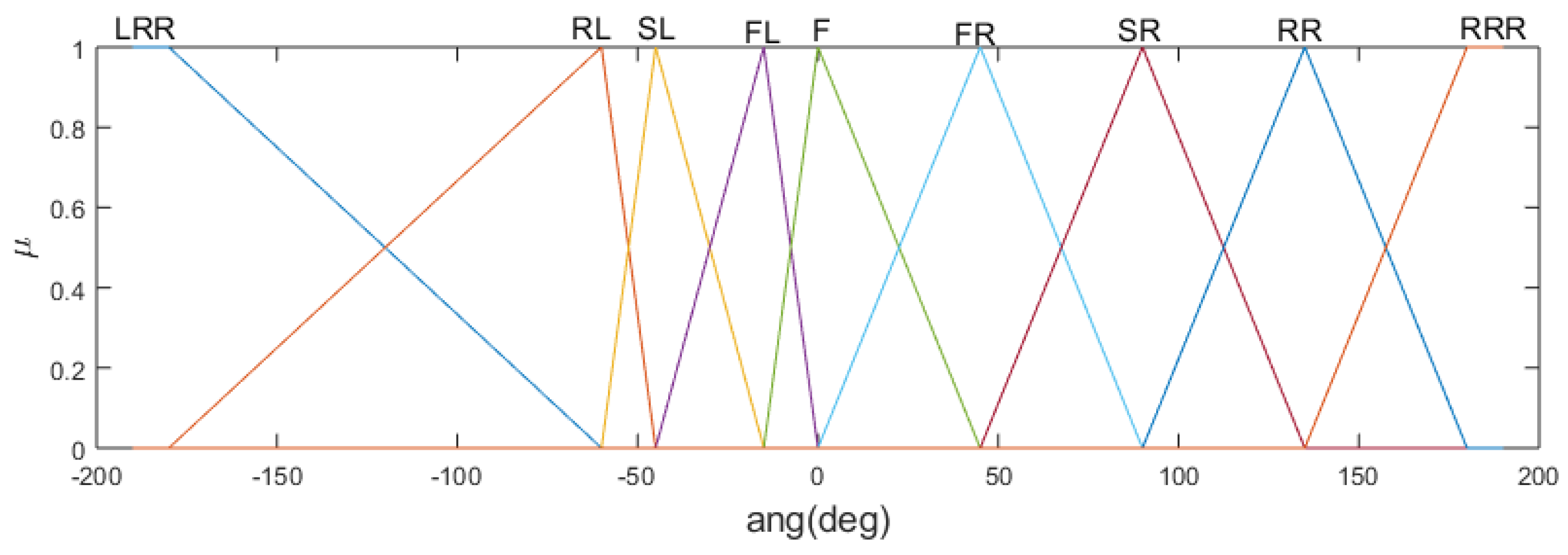
- angle difference between sector forces and the goal (). Five different databases were used for the five engines;
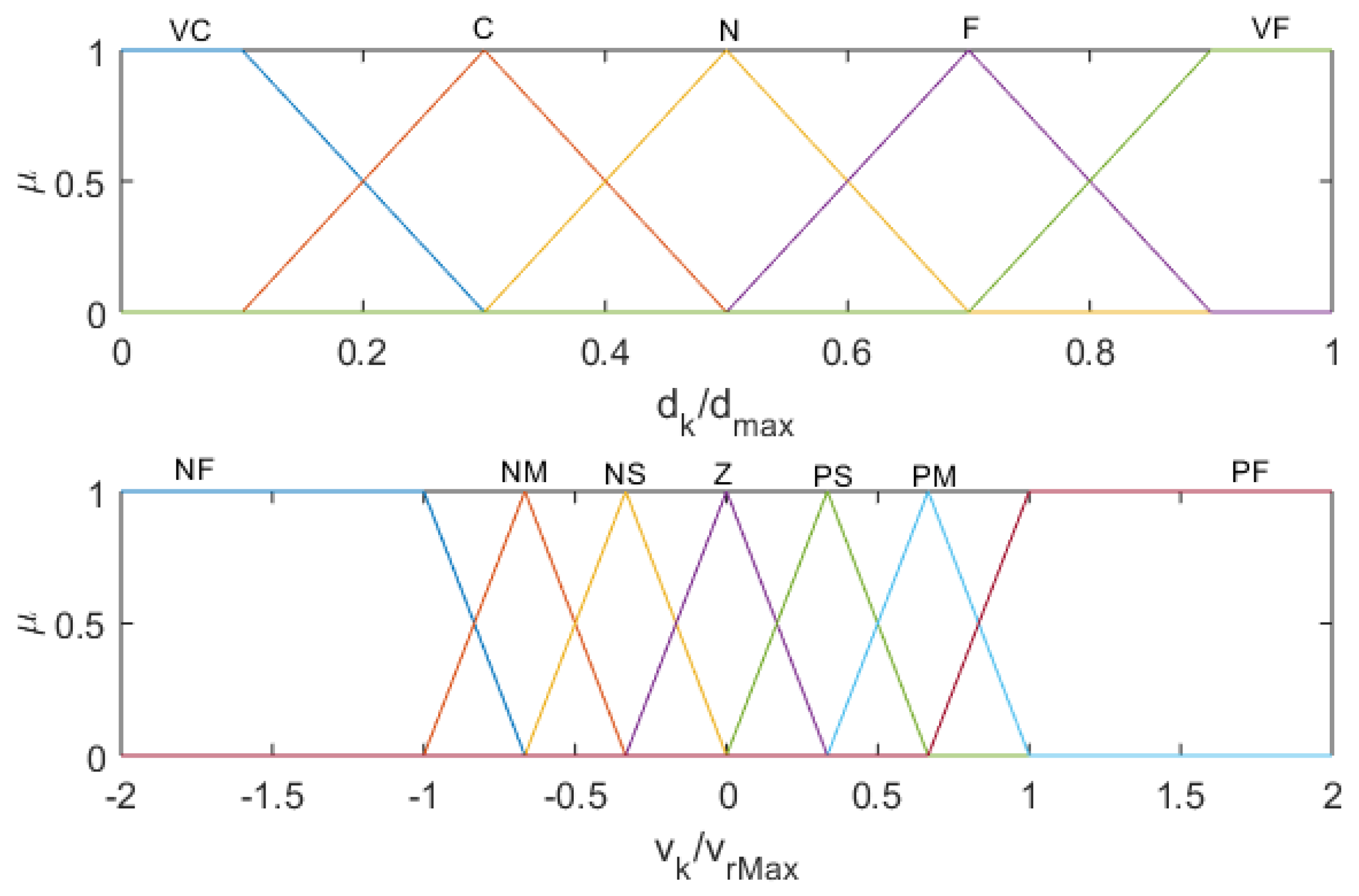
- normalized sector distance ()-this is common for all five engines (database is developed according to Equation (12));
- normalized sector velocity ()-this is common for all five engines (database is developed according to Equation (13))
- 1.
- fuzzy shaping factor ().
- ML module for goal seeking behavior;
- ML module for goal normal travel behavior;
- ML module for goal safe travel behavior;
- ML module for goal right side safe behavior;
- ML module for goal left side safe behavior.
- ML module for goal seeking behavior, 23%;
- ML module for normal travel behavior, 7%;
- ML module for safe travel behavior, 8%;
- ML module for right side safe behavior, 9%;
- ML module for left side safe behavior, 10%.
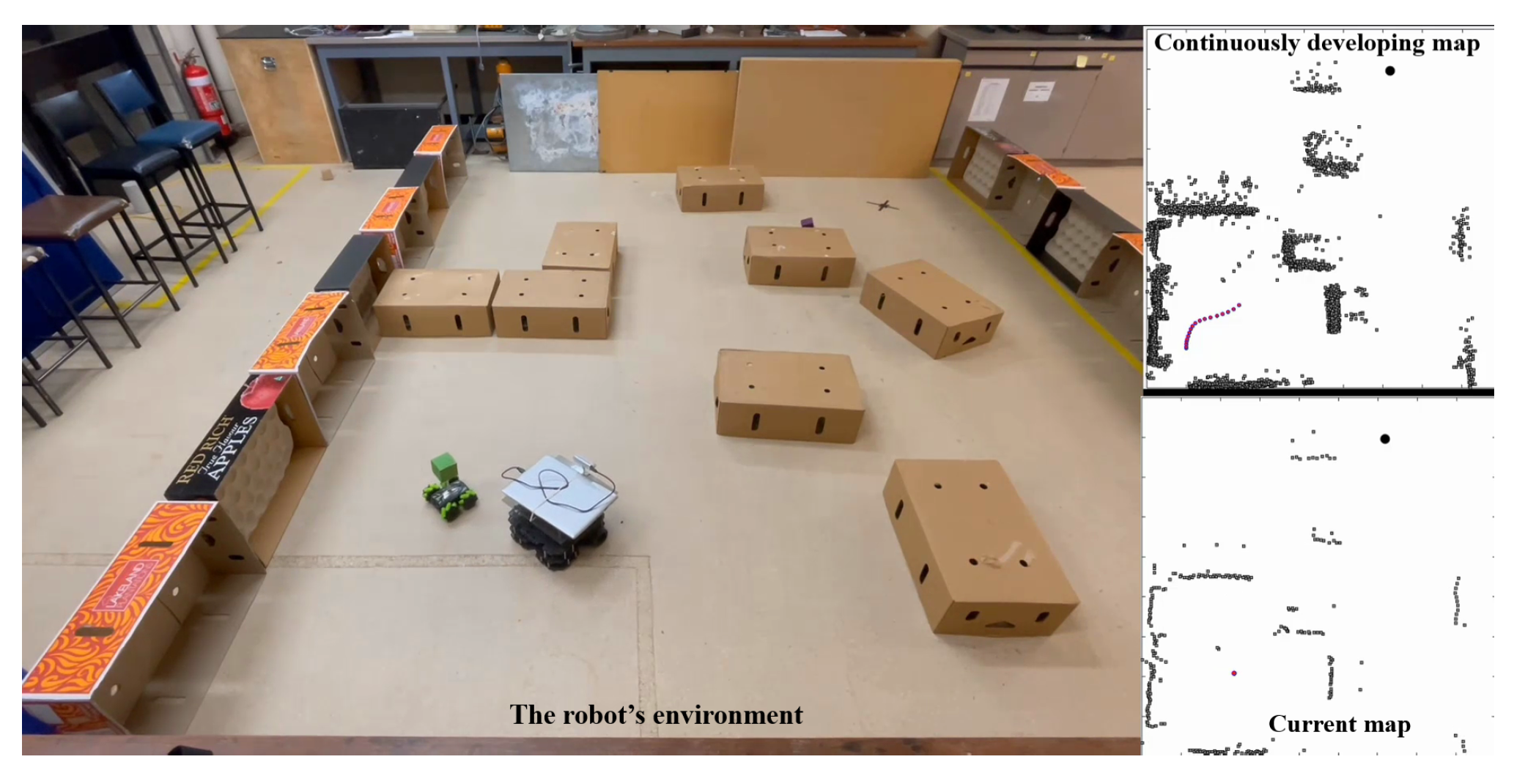
4. Experimental Testing and Analysis of Results
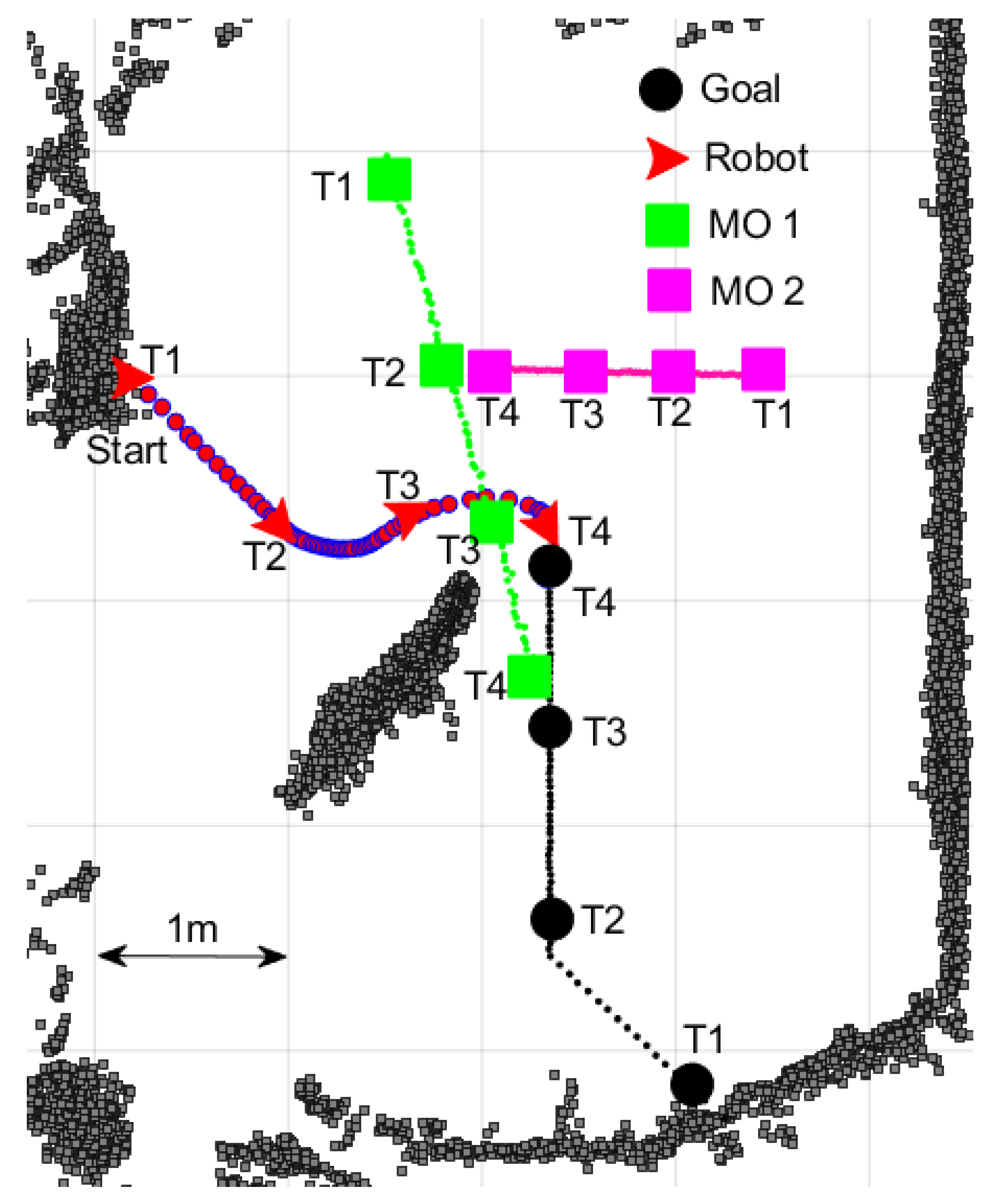
4.1. Experiment 1: Random Experiment with Two Moving Obstacles in a Cluttered Environment with a Moving Goal
- Move to the left (towards MO1 and MO2);
- Move to the right (more free-space).
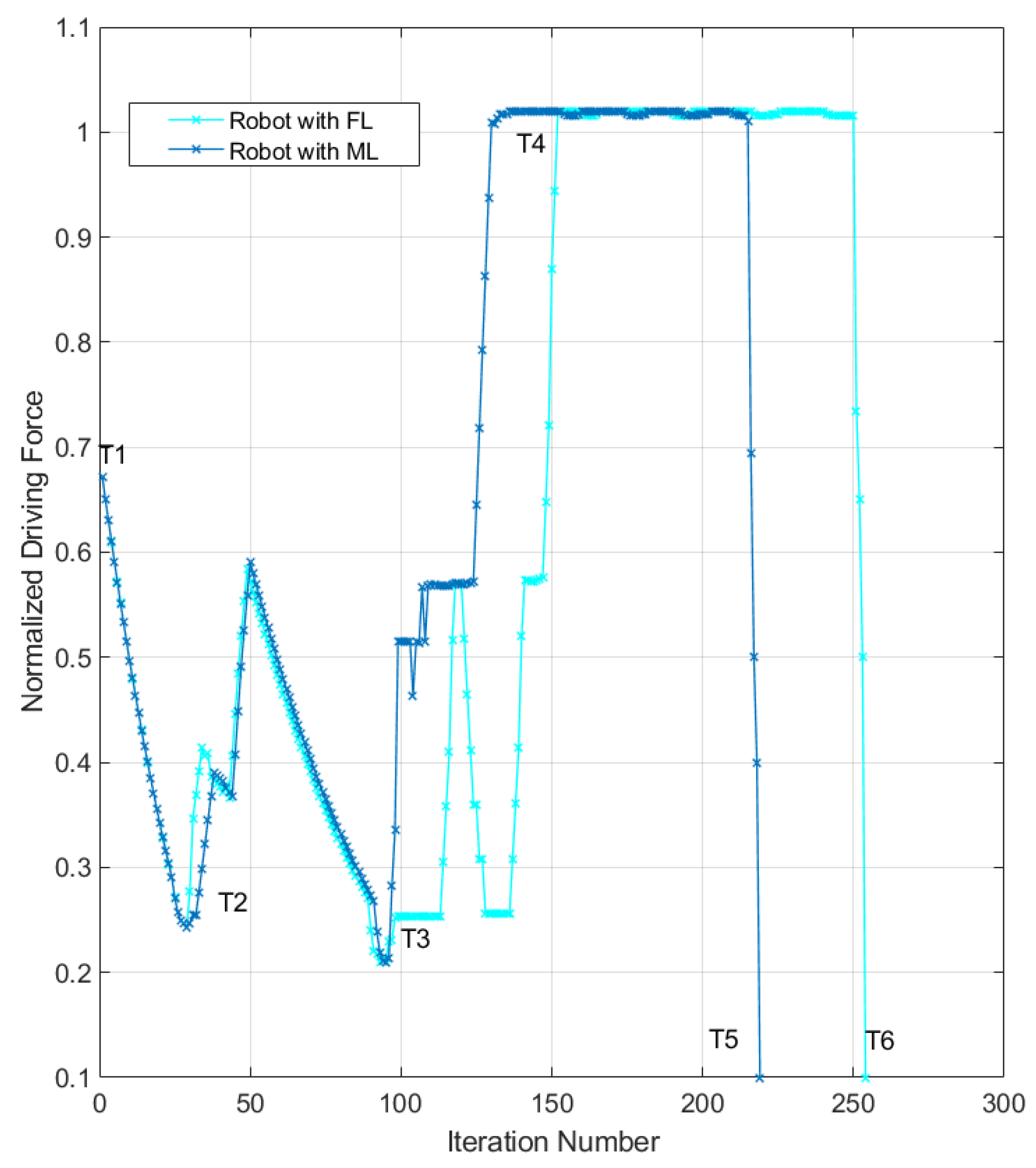
4.2. Comparative Test between FLC-Based ANADE and ML-Based ANADE
4.2.1. Comparison 1—Simulation Test
- With the ML-based force-shaping module;
- With FLC-based force shaping module.
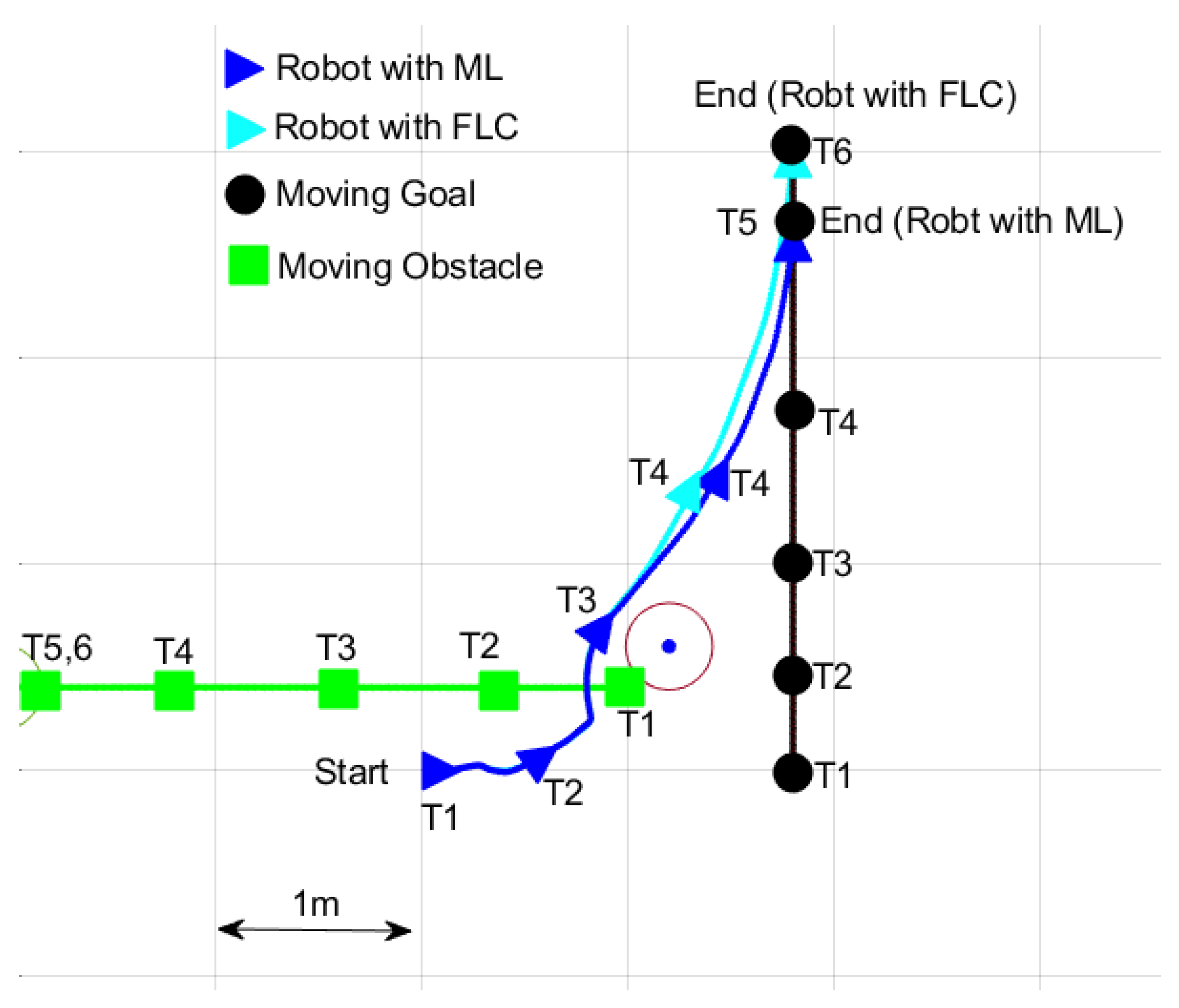
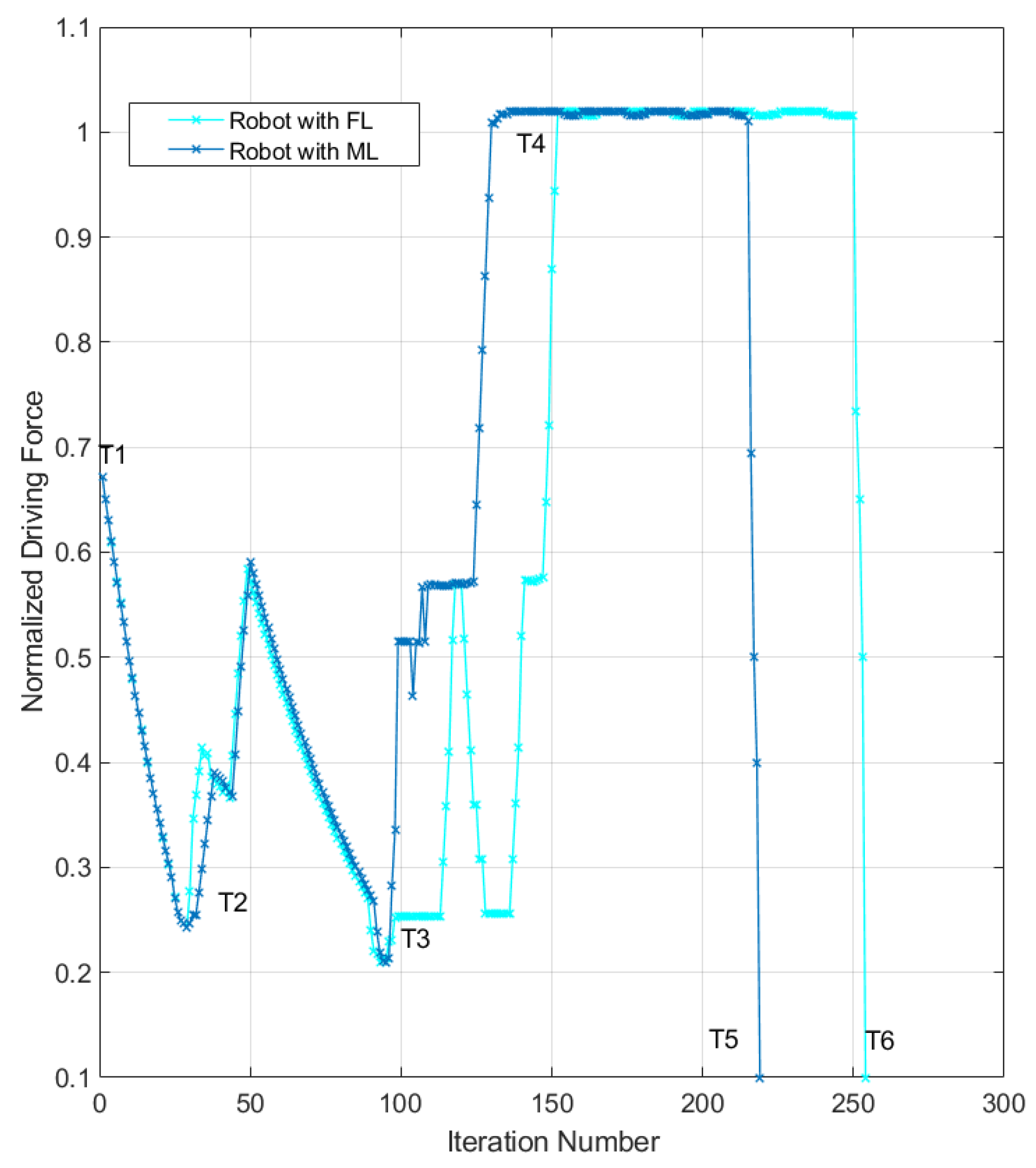
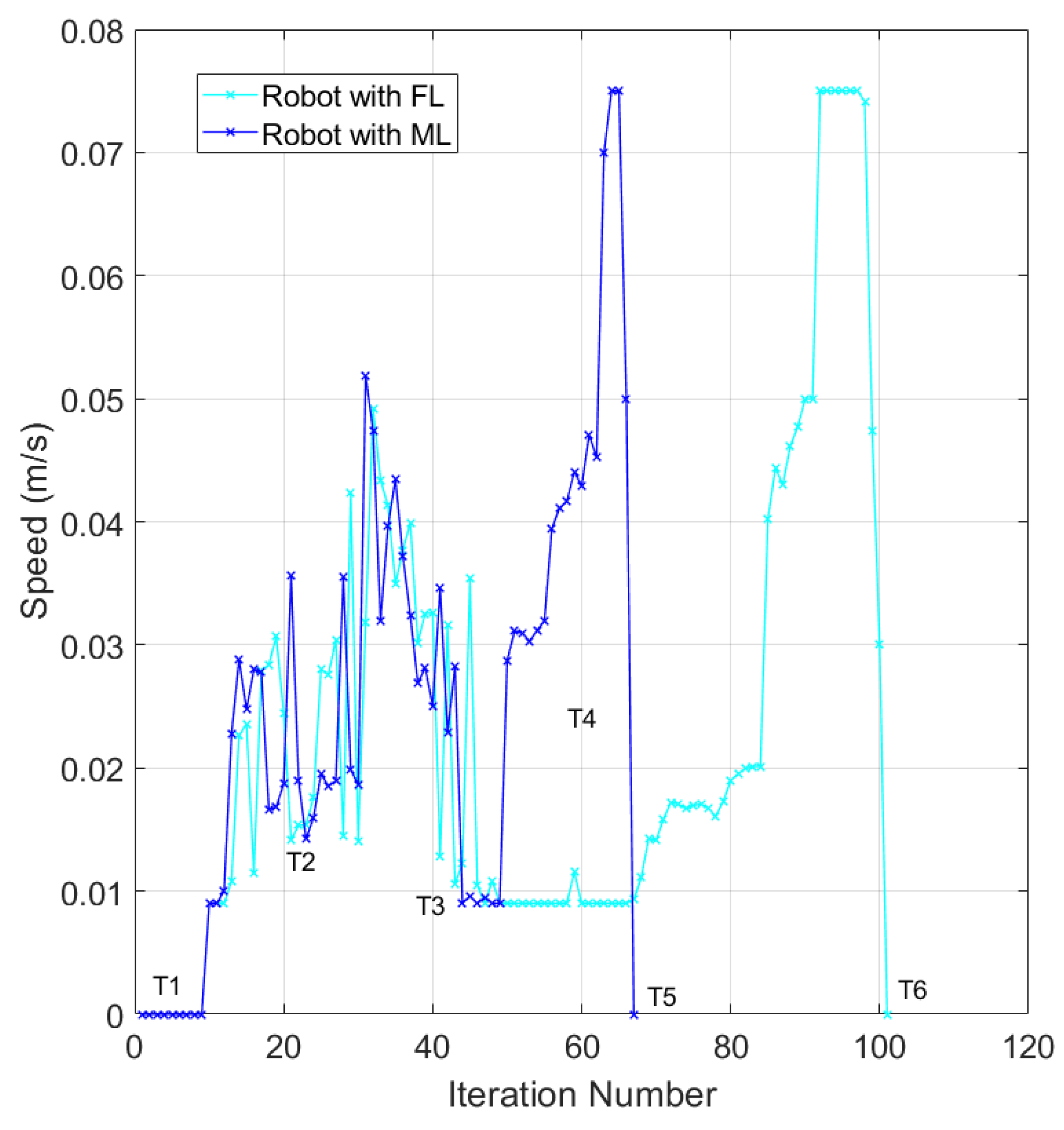
4.2.2. Comparison 2—Experimental Test
- With the ML-based force-shaping module;
- With FLC-based force shaping module.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hewawasam, H.S.; Ibrahim, Y.; Kahandawa, G.; Choudhury, T. Agoraphilic Navigation Algorithm under Dynamic Environment. IEEE/ASME Trans. Mechatron. 2022, 27, 1727–1737. [Google Scholar] [CrossRef]
- Hewawasam, H.; Ibrahim, M.Y.; Kahandawa, G.; Choudhury, T. Agoraphilic navigation algorithm in dynamic environment with obstacles motion tracking and prediction. Robotica 2022, 40, 329–347. [Google Scholar] [CrossRef]
- Hewawasam, H.S.; Ibrahim, M.Y.; Kahandawa, G.; Choudhury, T.A. Agoraphilic Navigation Algorithm in Dynamic Environment with and without Prediction of Moving Objects Location. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 5179–5185. [Google Scholar] [CrossRef]
- Patle, B.; Babu, L.G.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V. An algorithm for safe navigation of mobile robots by a sensor network in dynamic cluttered industrial environments. Robot. Comput. Integr. Manuf. 2018, 54, 65–82. [Google Scholar] [CrossRef]
- Pandey, A.; Parhi, D.R. New algorithm for behavior-based mobile robot navigation in cluttered environment using neural network architecture. World J. Eng. 2016, 13, 129–141. [Google Scholar] [CrossRef]
- Tao, X.; Lang, N.; Li, H.; Xu, D. Path Planning in Uncertain Environment with Moving Obstacles using Warm Start Cross Entropy. IEEE/ASME Trans. Mechatron. 2022, 27, 800–810. [Google Scholar] [CrossRef]
- Siming, W.; Tiantian, Z.; Weijie, L. Mobile robot path planning based on improved artificial potential field method. In Proceedings of the 2018 IEEE International Conference of Intelligent Robotic and Control Engineering (IRCE), Lanzhou, China, 24–27 August 2018; pp. 29–33. [Google Scholar]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. UAV motion planning and obstacle avoidance based on adaptive 3D cell decomposition: Continuous space vs discrete space. In Proceedings of the 2017 IEEE Second Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Schouwenaars, T.; De Moor, B.; Feron, E.; How, J. Mixed integer programming for multi-vehicle path planning. In Proceedings of the 2001 European Control Conference (ECC), Porto, Portugal, 4–7 September 2001; pp. 2603–2608. [Google Scholar]
- Akbaripour, H.; Masehian, E. Semi-lazy probabilistic roadmap: A parameter-tuned, resilient and robust path planning method for manipulator robots. Int. J. Adv. Manuf. Technol. 2017, 89, 1401–1430. [Google Scholar] [CrossRef]
- Ibrahim, M.Y.; Fernandes, A. Study on mobile robot navigation techniques. In Proceedings of the 2004 IEEE International Conference on Industrial Technology, IEEE ICIT’04, Hammamet, Tunisia, 8–10 December 2004; Volume 1, pp. 230–236. [Google Scholar]
- Hewawasam, H.S.; Ibrahim, M.Y.; Kahandawa, G.; Choudhury, T.A. Evaluating the Performances of the Agoraphilic Navigation Algorithm under Dead-Lock Situations. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 536–542. [Google Scholar] [CrossRef]
- Babinec, A.; Duchoň, F.; Dekan, M.; Mikulová, Z.; Jurišica, L. Vector Field Histogram* with look-ahead tree extension dependent on time variable environment. Trans. Inst. Meas. Control 2018, 40, 1250–1264. [Google Scholar] [CrossRef]
- Li, G.; Yamashita, A.; Asama, H.; Tamura, Y. An efficient improved artificial potential field based regression search method for robot path planning. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1227–1232. [Google Scholar]
- Saranrittichai, P.; Niparnan, N.; Sudsang, A. Robust local obstacle avoidance for mobile robot based on dynamic window approach. In Proceedings of the 2013 10th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Krabi, Thailand, 15–17 May 2013; pp. 1–4. [Google Scholar]
- Liu, C.; Lee, S.; Varnhagen, S.; Tseng, H.E. Path planning for autonomous vehicles using model predictive control. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 174–179. [Google Scholar]
- Hewawasam, H.S.; Ibrahim, M.Y.; Kahandawa, G.; Choudhury, T.A. Comparative Study on Object Tracking Algorithms for mobile robot Navigation in GPS-denied Environment. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 19–26. [Google Scholar] [CrossRef]
- Hewawasam, H.S.; Ibrahim, M.Y.; Kahandawa, G.; Choudhury, T.A. Development and Bench-marking of Agoraphilic Navigation Algorithm in Dynamic Environment. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 1156–1161. [Google Scholar] [CrossRef]
- Hewawasam, H.; Ibrahim, Y.; Kahandawa, G. A Novel Optimistic Local Path Planner: Agoraphilic Navigation Algorithm in Dynamic Environment. Machines 2022, 10, 1085. [Google Scholar] [CrossRef]
- Arroyo, J.; Maté, C. Forecasting histogram time series with k-nearest neighbors methods. Int. J. Forecast. 2009, 25, 192–207. [Google Scholar] [CrossRef]
- Khamparia, A.; Singh, S.K.; Luhach, A.K.; Gao, X.Z. Classification and analysis of users review using different classification techniques in intelligent e-learning system. Int. J. Intell. Inf. Database Syst. 2020, 13, 139–149. [Google Scholar] [CrossRef]
- Nampoothiri, M.H.; Anand, P.G.; Antony, R. Real time terrain identification of autonomous robots using machine learning. Int. J. Intell. Robot. Appl. 2020, 4, 265–277. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Starting Location (cm) | Starting Velocity (cm/s) |
|---|---|---|
| Robot | (0, 0) | 0 |
| Goal | (306, −327) | 3.2) |
| Moving Obstacle 1 (MO1) | (150, 100) | 2.5) |
| Moving Obstacle 2 (MO2) | (350, 0) | 0.81) |
| Parameter | Value |
|---|---|
| Robot’s path length | 275 cm |
| Goal’s path length | 301 cm |
| Robot’s average speed | 3 cm/s |
| Goal’s average speed | 3.4 cm/s |
| Total time | 89 s |
| Object | Starting Location (cm) | Starting Velocity (cm/s) |
|---|---|---|
| Robot | (0, 0) | 0 |
| Goal | (900, 0) | 2) |
| Moving Obstacle (MO) | (150, 100) | 2) |
| Parameter | Without ML | With FLC | Performance Comparison with Respect to Case 2 |
|---|---|---|---|
| Robot’s path length | 1749 cm | 1943 cm | 10% |
| Goal’s path length | 1303 cm | 1512 cm | 13.78% |
| Robot’s average speed | 2.68 cm/s | 2.57 cm/s | 4.3% |
| Goal’s of the goal | 2 cm/s | 2 cm/s | N/A |
| Total time | 651.8 s | 756 s | 13.78% |
| Object | Starting Location (cm) | Starting Velocity (cm/s) |
|---|---|---|
| Robot | (0, 0) | 0) |
| Goal | (0, −250) | 2) |
| Moving Obstacle 1 (MO1) | (150, −100) | 1.50) |
| Moving Obstacle 2 (MO2) | (150, −100) | 1.58) |
| Parameter | Without ML | With FLC | Performance Comparison with Respect to Case 2 |
|---|---|---|---|
| Robot’s path length | 376 cm | 467 cm | 19% |
| Goal’s path length | 252 cm | 379 cm | 33% |
| Robot’s average speed | 2.1 cm/s | 2.3 cm/s | 8% (low) |
| Goal’s of the goal | 1.54 cm/s | 1.52 cm/s | N/A |
| Total time | 132 s | 202 s | 35% |
| Avg. sample time | 1.9 s | 2.0 s | 5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hewawasam, H.; Kahandawa, G.; Ibrahim, Y. Machine Learning-Based Agoraphilic Navigation Algorithm for Use in Dynamic Environments with a Moving Goal. Machines 2023, 11, 513. https://doi.org/10.3390/machines11050513
Hewawasam H, Kahandawa G, Ibrahim Y. Machine Learning-Based Agoraphilic Navigation Algorithm for Use in Dynamic Environments with a Moving Goal. Machines. 2023; 11(5):513. https://doi.org/10.3390/machines11050513
Chicago/Turabian StyleHewawasam, Hasitha, Gayan Kahandawa, and Yousef Ibrahim. 2023. "Machine Learning-Based Agoraphilic Navigation Algorithm for Use in Dynamic Environments with a Moving Goal" Machines 11, no. 5: 513. https://doi.org/10.3390/machines11050513
APA StyleHewawasam, H., Kahandawa, G., & Ibrahim, Y. (2023). Machine Learning-Based Agoraphilic Navigation Algorithm for Use in Dynamic Environments with a Moving Goal. Machines, 11(5), 513. https://doi.org/10.3390/machines11050513