Abstract
A number of applications from mathematical programmings, such as minimization problems, variational inequality problems and fixed point problems, can be written as equilibrium problems. Most of the schemes being used to solve this problem involve iterative methods, and for that reason, in this paper, we introduce a modified iterative method to solve equilibrium problems in real Hilbert space. This method can be seen as a modification of the paper titled “A new two-step proximal algorithm of solving the problem of equilibrium programming” by Lyashko et al. (Optimization and its applications in control and data sciences, Springer book pp. 315–325, 2016). A weak convergence result has been proven by considering the mild conditions on the cost bifunction. We have given the application of our results to solve variational inequality problems. A detailed numerical study on the Nash–Cournot electricity equilibrium model and other test problems is considered to verify the convergence result and its performance.
1. Introduction
An equilibrium problem (EP) is a generalized concept that unifies several mathematical problems, such as the variational inequality problems, minimization problems, complementarity problems, the fixed point problems, non-cooperative games of Nash equilibrium, the saddle point problems and scalar and vector minimization problems (see e.g., [1,2,3]). The particular form of an equilibrium problem was firstly established in 1992 by Muu and Oettli [4] and then further elaborated by Blum and Oettli [1]. Next, we consider the concept of an equilibrium problem introduced by Blum and Oettli in [1]. Let C be a non-empty, closed and convex subset of a real Hilbert space and is bifunction with , for each A equilibrium problem regarding f on the set C is defined in the following way:
Many methods have been already established over the past couple of years to figure out the equilibrium problem in Hilbert spaces [5,6,7,8,9,10,11,12,13,14,15], the inertial methods [11,16,17,18] and others in [18,19,20,21,22,23,24]. In particular, Tran et al. introduced an iterative scheme in [8], in that a sequence was generated in the following way:
where and are Lipschitz constants. Lyashko et al. [25] in 2016 introduced an improvement of the method (2) to solve equilibrium problem and sequence was generated in the following way:
where and are Lipschitz constants.
In this paper, we consider the extragradient method in (3) and to provide its improvement by using the inertial scheme [26] and continue to improve the step size rule for its second step. The step size is not fixed in our case, but it is dependent on a particular formula by using prior information of the bifunction values. A weak convergence theorem dealing with the suggested technique is presented by having the specific bi-functional condition. We have also considered how our results are presented to the problems of a variational inequality. A few other formulations of the problem of variational inequalities are discussed, and many computational examples in finite and infinite dimensions spaces are also presented to demonstrate the applicability of our proposed results.
In this study, we study the equilibrium problem through the following assumptions:
- ()
- A bifunction is said to be (see [1,27]) pseudomonotone on C if
- ()
- A bifunction is said to be Lipschitz-type continuous [28] on C if there exist such that
- ()
- for each and satisfying
- ()
- is convex and subdifferentiable on for each
The rest of this paper will be organized as follows: In Section 2, we give a few definitions and important lemmas to be used in this paper. Section 3 includes the main algorithm involving pseudomonotone bifunction and provides a weak convergence theorem. Section 4 describes some applications in the variational inequality problems. Section 5 sets out the numerical studies to demonstrate the algorithmic efficiency.
2. Preliminaries
In this section, some important lemmas and basic definitions are provided. Moreover, denotes the solution set of an equilibrium problem on the set C and p is any arbitrary element of .
A metric projection of u onto a closed, convex subset C of is defined by
Lemma 1
([29]). Let be a metric projection from onto Then
- (i)
- For all and
- (ii)
- if and only if
Lemma 2
([29]). For all with . Then, the following relationship is holds.
Assume that be a convex function and subdifferential of g at is defined by
Given that is convex and subdifferentiable on for each fixed and subdifferential of at defined by
A normal cone of C at is defined by
Lemma 3.
([30]). Assume that C is a nonempty, closed and convex subset of a real Hilbert space and be a convex, lower semi-continuous and subdifferentiable function on Then, is a minimizer of a function h if and only if where and denotes the subdifferential of h at u and the normal cone of C at u, respectively.
Lemma 4
([31]). Let , and are non-negative real sequences such that
where such that for all Then, the following relations are true.
- (i)
- with
- (ii)
Lemma 5
([32]). Let a sequence in and and the following conditions have been met:
- (i)
- for each exists;
- (ii)
- each weak sequentially limit point of belongs to set C.
Then, weakly converges to an element in
3. Main Results
In this section, we present our main algorithm and provide a weak convergence theorem for our proposed method. The detailed method is given below.
Remark 1.
By Expression (5), we obtain
Lemma 6.
Let be a sequence generated by Algorithm 1. Then, the following inequality holds.
| Algorithm 1 Modified Popov’s subgradient extragradient-like iterative scheme. |
|
Proof.
Lemma 7.
Let be a sequence generated by Algorithm 1. Then, the following inequality holds.
Proof.
The proof is same as the proof of Lemma 6. □
Lemma 8.
If and in Algorithm 1, then
Proof.
The proof of this can easily be seen from Lemmas 6 and 7. □
Lemma 9.
Let be a bifunction and satisfies the conditions()–(). Then, for each we have
Proof.
By Lemma 6, we obtain
Thus, and the condition () implies that From (8), we have
From Expression (4), we obtain
Combining expression (9) and (10), implies that
By Lemma 7, we have
Thus, combining (11) and (12) we get
We have the following mathematical expressions:
From the above equation and (13), we have
We also have
Finally, we get
□
Theorem 1.
Assume that satisfies the conditions()–(). Then, for some the sequence and generated by Algorithm 1, weakly converge to
Proof.
By Lemma 9, we obtain
By definition of in the Algorithm 1, we have
Adding the term on both sides in (14) with (15) for we have
Given that then the last inequality turns into
From the definition of , we have
From , we obtain
Combining the Expressions (20), (21) and (23) we have
where
Assume that
where Next, (26) implies that
Next, we have to compute
By the use of (27) and (28) for some implies that
The relation (29) implies that is non-increasing. From we have
By definition , we have
From Equations (30) and (31), we obtain
It follows (29) and (32) that
By letting in (33), we obtain
From Expressions (22) with (34), we obtain
From (32), we have
From Expression (18) and using (21), we have
Fix and using above expression for Summing them up, we obtain
letting , and due to sum of the positive terms series, we obtain
Moreover, we obtain
By using the triangular inequality, we get
It is follow from the relation (24), we obtain
with (34), (39) and Lemma 4 imply that the sequences and limits exist for every . It means that , and are bounded sequences. Take z an arbitrary sequential cluster point of the sequence Now our aim to prove that By Lemma 6 with Expressions (10) and (12), we write
where y in Next, from (35), (40), (41) and due to boundedness of gives that the right hand side reaches to zero. Due to , and we have
Thus, implies that for all It proves that By Lemma 5, the sequence converges weakly to □
If in Algorithm 1, we have a better version of Lyashko et al. [25] extragradient method in terms of step size improvement.
Corollary 1.
Let satisfy the conditions()-(). For some the sequence and generated in the following way:
- (i)
- Given and
- (ii)
- Computewhere
Then, the sequences and converge weakly to
4. Applications
Now, we consider the applications of Theorem 1 to solve the variational inequality problems involving pseudomonotone and Lipschitz continuous operator. A variational inequality problem is defined in the following way:
We consider that F meets the following conditions.
- ()
- Solution set is non-empty and F is pseudomonotone on C, i.e.,
- ()
- F is L-Lipschitz continuous on C if there exists a positive constants such that
- ()
- for every and satisfying
Corollary 2.
Assume that meet the conditions()–(). Let and be the sequences are generated in the following way:
- (i)
- Choose and a sequence is non-decreasing such that , , and .
- (ii)
- Computewhile
Then, the sequence and converge weakly to p.
Corollary 3.
Assume that meets the conditions()-(). Let and be the sequences are generated in the following way:
- (i)
- Choose and
- (ii)
- Computewhile
Then, the sequence and converge weakly to p.
5. Computational Illustration
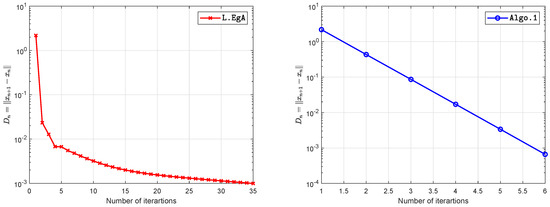
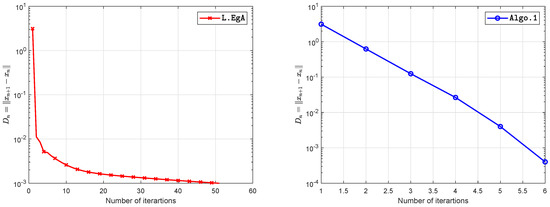
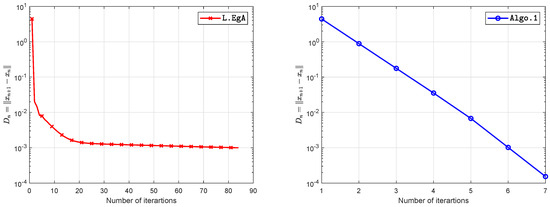
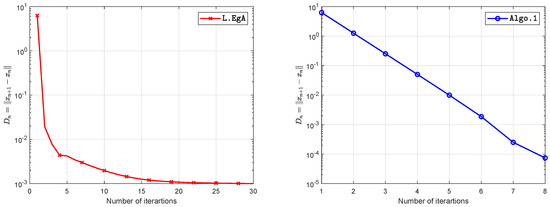
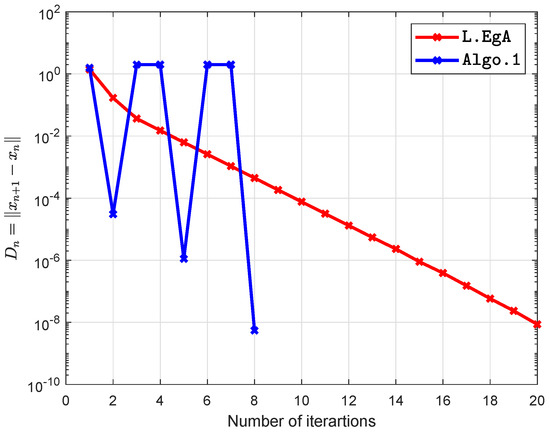
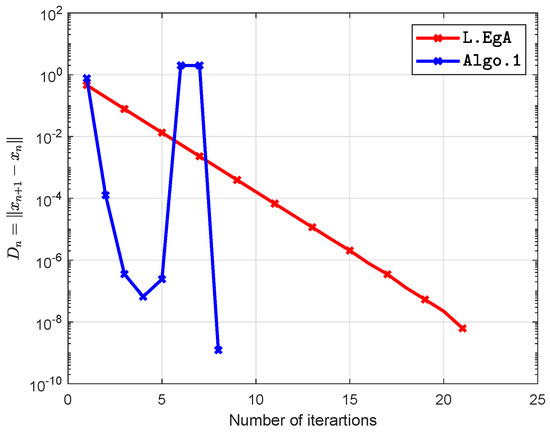
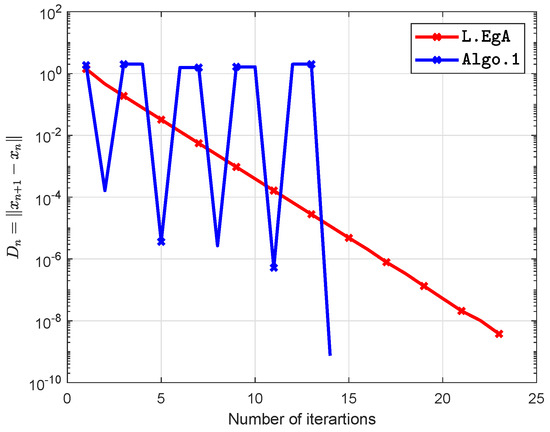
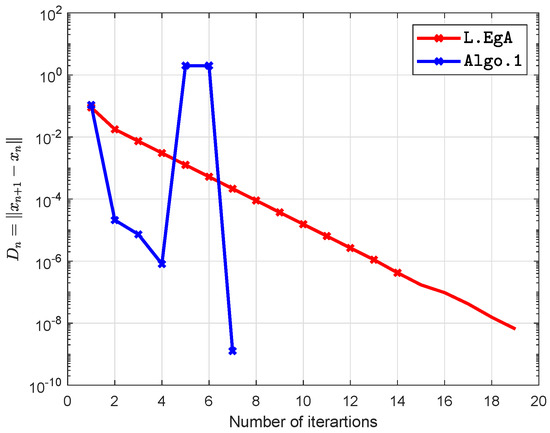
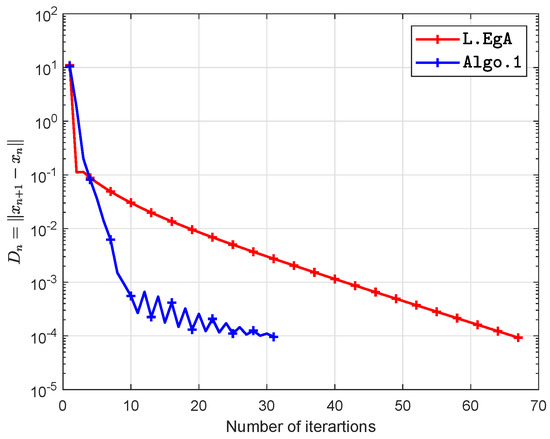
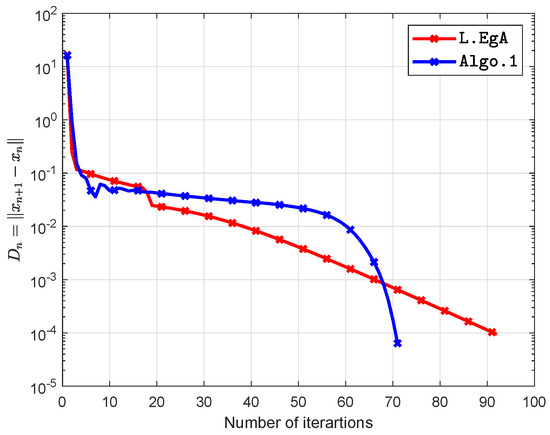
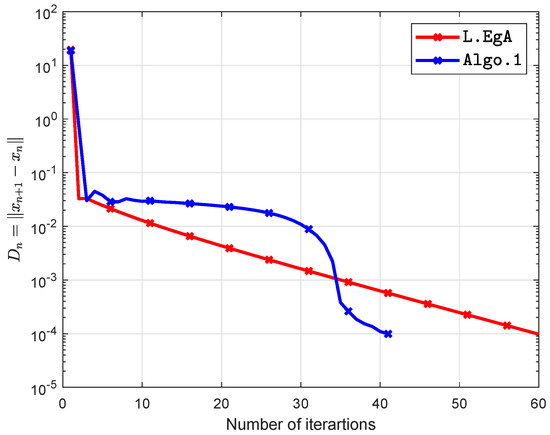
Numerical findings are discussed in this section to show the efficiency of our suggested method. Moreover, for Lyashko et al.’s [25] method (L.EgA), our proposed algorithm (Algo.1) and we use error term
Example 1.

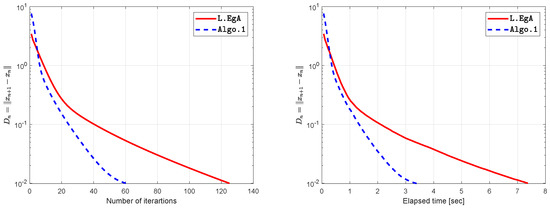
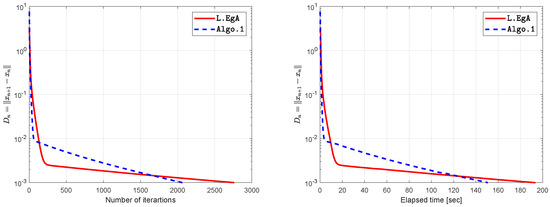
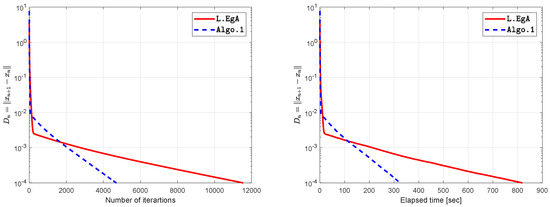
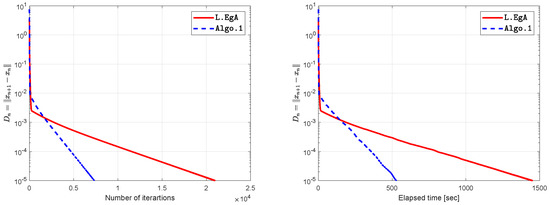
Consider the Nash–Cournot equilibrium of electricity markets as in [7]. In this problem, there are total three electricity producing firms: i The firm’s 1,2,3 have generating units named as and respectively. Assume that denote the producing power of the unit for Suppose that the value p of electricity can be taken as The cost of the manufacture j unit follows:
where and The values are provided in and in Table 1. Profit of the firm i is
where with reference to set with and give in Table 2. Define the equilibrium bifunction f in the following way:
where
This model of electricity markets can be viewed as an equilibrium problem
Numerical conclusions have shown in Figure 1, Figure 2, Figure 3 and Figure 4 and Table 3. For these numerical experiments we take and
Table 1.
Parameters for cost bi-function.
Table 2.
Values used for constraint set.
Figure 1.
Example 1 while tolerance is
Figure 2.
Example 1 while tolerance is
Figure 3.
Example 1 while tolerance is
Figure 4.
Example 1 while tolerance is
Example 2.
Assume that the following cost bifunction f defined by
on the convex set while D is an matrix and d is a non-negative vector. In the above bifunction definition we take A is an matrix, B is an skew-symmetric matrix, C is an diagonal matrix having diagonal entries are non-negative. The matrices are generated as; A = rand(n), K = rand(n), and C = diag(rand(n,1)). The bifunction f is monotone and having Lipschitz-type constants are Numerical results are presented in the Figure 5, Figure 6, Figure 7 and Figure 8 and Table 4. For these numerical experiments we take and
Figure 5.
Example 2 for average number of iterations while
Figure 6.
Example 2 for average number of iterations while
Figure 7.
Example 2 for average number of iterations while
Figure 8.
Example 2 for average number of iterations while
Example 3.
Assume that is defined by
with It is not hard to check that F is Lipschitz continuous with and pseudomonotone. The step size for Lyashko et al. [25] and , and Computational results are shown in the Table 5 and in Figure 9, Figure 10, Figure 11 and Figure 12.
Figure 9.
Example 3 while
Figure 10.
Example 3 while
Figure 11.
Example 3 while
Figure 12.
Example 3 while
Example 4.
Let is defined by
and Here, F is not monotone but pseudomonotone on C and L-Lipschitz continuous through (see, e.g., [33]). The stepsize for Lyashko et al. [25] and , , and The computational experimental findings are written in Table 6 and in Figure 13, Figure 14 and Figure 15.
Figure 13.
Example 4 while
Figure 14.
Example 4 while
Figure 15.
Example 4 while
6. Conclusions
We have established an extragradient-like method to solve pseudomonotone equilibrium problems in real Hilbert space. The main advantage of the proposed method is that an iterative sequence has been incorporated with a certain step size evaluation formula. The step size formula is updated for each iteration based on the previous iterations. Numerical findings were presented to show our algorithm’s numerical efficiency compared with other methods. Such numerical investigations indicate that inertial effects often generally improve the effectiveness of the iterative sequence in this context.
Author Contributions
Conceptualization, W.K. and K.M.; methodology, W.K. and K.M.; writing–original draft preparation, W.K. and K.M.; writing–review and editing, W.K. and K.M.; software, W.K. and K.M.; supervision, W.K.; project administration and funding acquisition, K.M. All authors have read and agreed to the published version of the manuscript.
Funding
This project was supported by Rajamangala University of Technology Phra Nakhon (RMUTP).
Acknowledgments
The first author would like to thanks the Rajamangala University of Technology Thanyaburi (RMUTT) (Grant No. NSF62D0604). The second author would like to thanks the Rajamangala University of Technology Phra Nakhon (RMUTP).
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Konnov, I. Equilibrium Models and Variational Inequalities; Elsevier: Amsterdam, The Netherlands, 2007; Volume 210. [Google Scholar]
- Muu, L.D.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. Theory Methods Appl. 1992, 18, 1159–1166. [Google Scholar]
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Flåm, S.D.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1996, 78, 29–41. [Google Scholar]
- Quoc, T.D.; Anh, P.N.; Muu, L.D. Dual extragradient algorithms extended to equilibrium problems. J. Glob. Optim. 2012, 52, 139–159. [Google Scholar]
- Quoc Tran, D.; Le Dung, M.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar]
- Santos, P.; Scheimberg, S. An inexact subgradient algorithm for equilibrium problems. Comput. Appl. Math. 2011, 30, 91–107. [Google Scholar]
- Takahashi, S.; Takahashi, W. Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 331, 506–515. [Google Scholar]
- Ur Rehman, H.; Kumam, P.; Kumam, W.; Shutaywi, M.; Jirakitpuwapat, W. The Inertial Sub-Gradient Extra-Gradient Method for a Class of Pseudo-Monotone Equilibrium Problems. Symmetry 2020, 12, 463. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Argyros, I.K.; Alreshidi, N.A.; Kumam, W.; Jirakitpuwapat, W. A Self-Adaptive Extra-Gradient Methods for a Family of Pseudomonotone Equilibrium Programming with Application in Different Classes of Variational Inequality Problems. Symmetry 2020, 12, 523. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Shutaywi, M.; Alreshidi, N.A.; Kumam, W. Inertial Optimization Based Two-Step Methods for Solving Equilibrium Problems with Applications in Variational Inequality Problems and Growth Control Equilibrium Models. Energies 2020, 13, 3293. [Google Scholar] [CrossRef]
- Hieu, D.V. New extragradient method for a class of equilibrium problems in Hilbert spaces. Appl. Anal. 2017, 97, 811–824. [Google Scholar] [CrossRef]
- Hammad, H.A.; ur Rehman, H.; De la Sen, M. Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry 2020, 12, 1198. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Argyros, I.K.; Deebani, W.; Kumam, W. Inertial Extra-Gradient Method for Solving a Family of Strongly Pseudomonotone Equilibrium Problems in Real Hilbert Spaces with Application in Variational Inequality Problem. Symmetry 2020, 12, 503. [Google Scholar] [CrossRef]
- Koskela, P.; Manojlović, V. Quasi-Nearly Subharmonic Functions and Quasiconformal Mappings. Potential Anal. 2012, 37, 187–196. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Argyros, I.K.; Shutaywi, M.; Shah, Z. Optimization Based Methods for Solving the Equilibrium Problems with Applications in Variational Inequality Problems and Solution of Nash Equilibrium Models. Mathematics 2020, 8, 822. [Google Scholar] [CrossRef]
- Rehman, H.U.; Kumam, P.; Dong, Q.L.; Peng, Y.; Deebani, W. A new Popov’s subgradient extragradient method for two classes of equilibrium programming in a real Hilbert space. Optimization 2020, 1–36. [Google Scholar] [CrossRef]
- Yordsorn, P.; Kumam, P.; ur Rehman, H.; Ibrahim, A.H. A Weak Convergence Self-Adaptive Method for Solving Pseudomonotone Equilibrium Problems in a Real Hilbert Space. Mathematics 2020, 8, 1165. [Google Scholar] [CrossRef]
- Todorčević, V. Harmonic Quasiconformal Mappings and Hyperbolic Type Metrics; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Yordsorn, P.; Kumam, P.; Rehman, H.U. Modified two-step extragradient method for solving the pseudomonotone equilibrium programming in a real Hilbert space. Carpathian J. Math. 2020, 36, 313–330. [Google Scholar]
- Lyashko, S.I.; Semenov, V.V. A new two-step proximal algorithm of solving the problem of equilibrium programming. In Optimization and Its Applications in Control and Data Sciences; Springer: Berlin/Heidelberg, Germany, 2016; pp. 315–325. [Google Scholar]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Mastroeni, G. On Auxiliary Principle for Equilibrium Problems. In Nonconvex Optimization and Its Applications; Springer: New York, NY, USA, 2003; pp. 289–298. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: Berlin/Heidelberg, Germany, 2011; Volume 408. [Google Scholar]
- Tiel, J.V. Convex Analysis; John Wiley: Hoboken, NJ, USA, 1984. [Google Scholar]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef]
- Shehu, Y.; Dong, Q.L.; Jiang, D. Single projection method for pseudo-monotone variational inequality in Hilbert spaces. Optimization 2019, 68, 385–409. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).