Abstract
In this article, we will introduce a new generalized proximal -contraction for multivalued and single-valued mappings named -proximal contraction and -proximal contraction. Using these newly constructed proximal contractions, we will establish new results for the coincidence best proximity point, best proximity point, and fixed point for multivalued mappings in the context of rectangular metric space. Also, we will reduce these contractions for single-valued mappings, named -proximal contraction and -proximal contraction, to establish results for the coincidence proximity point, best proximity point, and fixed point results. We will give some illustrated examples for our newly generated results with graphical representations. In the last section, we will also find the solution to the equation of motion by using our defined results.
Keywords:
rectangular metric space; coincidence best proximity point; θ-contraction; fixed point; equation of motion MSC:
47H10; 54H25
1. Introduction
The term denotes a fixed point for a self-mapping on a metric space. However, it is evident that not every mapping exhibits such a property. We present some examples of such mappings specified on other sets; we call them non-self-mappings and translation mappings. When this happens, our objective shifts towards identifying those elements that are very close to their images, and we call them best approximations; in fact, these approximations are actually fixed points. Some new developments in fixed point theory are discussed in [1,2].
Let , a non-self-mapping, having no fixed point. However, when we approach the image of a point under this mapping, we continuously observe progress. This highlights an important idea called best proximity. Obtaining an optimal global solution, denoted as , is the key to the best proximity theorem. When we have the mapping , for all , the distance is at a minimum of . Constructing a close approximation for the relation ensures that is satisfied.
The main concept of best proximity point was first introduced in 1997 by Sadiq Basha et al. [3,4]. The method to obtain the best proximity point was given by Eldred [5]. Umer I. et al. [6] presented fuzzy adaptations of several well-known iterative mappings. Additionally, they established various concrete conditions on real-valued functions to ensure the existence of best proximity points for generalized fuzzy -iterative mappings in the framework of fuzzy metric spaces.
Youns et al. [7] established coincidence point, best proximity point, and fixed point results for multivalued proximal contractions within the framework of b-metric spaces, utilizing an alternating distance function. Komal et al. [8] obtained theorems for the best coincidence proximity points via Geraghty-type proximal cyclic contraction in metric space. Moreover, Jleli et al.’s paper [9] proposed the idea of -contraction. The proximity theorem has undergone various modifications and adaptations, as evidenced by works such as [10]. Sametric et al. [11] introduce a new concept of -contractive type mappings and establish fixed point theorems for such mappings in complete metric spaces, and gave applications to ordinary differential equations.
Here, we explore applications of fixed point theory in nonlinear systems. It is used to analyze the light-clock model [12], which describes mass as an emergent property of entangled photons, and to study battery capacity gaps and multipartite entanglement [13] under LOCC transformations. Fixed point theory also aids in the identification of nonlinear state-space models (NSSM) [14] and ensures the stability of solutions in the expectation maximization (EM) algorithm. Additionally, it was applied to analyze nonlinear mappings in a bionic bimanual robot teleoperation system [15] and to study the stability and convergence of hand detection and pose estimation algorithms, ensuring accurate motion transfer between human and robot.
The nonlinear nature of the diffusive wave model (DWM) [16] aligns with fixed point theory, enabling the exploration of forward and inverse problems regarding solution existence and stability. Fixed point theory is also applied to study the complex dynamics of Sun-perturbed Earth–Moon triangular libration points [17] and to analyze the Sobolev norm growth in the Hartree equation [18]. Furthermore, in the design and control of bioinspired soft robotic hands [19], fixed point theory helps analyze complex nonlinear dynamics and ensures stability and convergence, particularly in material compliance, actuator dynamics, and controller performance in uncertain environments.
After conducting a thorough analysis of the literature, we have discovered important information that has led to remarkable findings about the best coincidence proximity points in the rectangular metric space. We will introduce new -type proximal contractions for multivalued mappings with an alternating distance function . We reduce our findings to the result of fixed points that are mentioned as corollaries of the notion of best proximity points. Significantly, we give descriptive examples to demonstrate the best coincidence points to fixed points with graphical representations. These examples support the validity and importance of the conclusions reported in this manuscript in addition to clarifying our findings. In the last section, we offer a concise approach to solving the equation of motion using our findings. This application not only validates our theoretical results, but also demonstrates their strength in practical, real-world scenarios.
2. Preliminaries
To set the stage for our investigation, we first gather some foundational definitions, key concepts, and well-established results. These serve as the building blocks that guide us toward formulating and achieving our new findings.
Definition 1
([20]). If the following given conditions are satisfied by the function , where ʘ is a non-empty set, then đ is considered as a metric, such that
- 1.
- 2.
- iff
- 3.
- 4.
- , for each
Then, we call a metric space.
From [20], here, we have few examples of the distance.
Example 1.
The functions are given as
Then, and are metrics defined on . Furthermore, defines a metric on non-zero real numbers .
Example 2.
For the real numbers , suppose and ; then, is given as
where đ is a metric defined on
Example 3.
Let , with the metric and the metric space denoted as . The function is defined as follows:
The metric is termed a discrete metric, and is termed a discrete metric space.
In 2000, Branciari generalized the metric spaces concept in [21] as follows:
Definition 2.
If the conditions given below are fulfilled by the function , where ʘ is a non-empty set, then đ is considered to be a rectangular metric, such that
- 1.
- 2.
- 3.
- 4.
- for allThen, is termed a rectangular metric space.
Definition 3
([21]). If a sequence (a rectangular metric space), then the following holds:
- (i)
- We can write if and only if the sequence converges to a point .
- (ii)
- If the sequence satisfies the condition , then it is known to be Cauchy.
- (iii)
- If, in the rectangular metric space ʘ, every Cauchy sequence is convergent, then we call it a complete metric space, and vice versa.
- (iv)
- The uniqueness of limits is ensured for every convergent sequence in the rectangular metric space ʘ.
Definition 4.
Let be a rectangular metric space with subsets and . Then, the following is how we define and :
where
which is the distance between sets and .
Definition 5
([22]). Let , a rectangular metric space, with subsets ; then, , known to satisfy the -property if
implies that
where and .
Definition 6
([23]). Let . Upon meeting the axioms given below, it is termed an alternating distance function:
- (i)
- is continuous.
- (ii)
- If , then
- (iii)
- For all , .
Definition 7
([9]). Let the function . Upon meeting the axioms given below, the
function is termed a contraction, and collectively, the family of these functions is known as :
- ()
- θ is non-decreasing.
- ()
- For every , if and only if .
- ()
- For and .
A self-map defined on , a rectangular metric space, is identified as a -contraction, where is from the family , and serves as a constant.
where are elements of
Example 4.
Define some functions as follows: for all ,
- 1.
- ;
- 2.
- ;
- 3.
- ;
- 4.
- ;
- 5.
- ;
- 6.
- .
Then, .
Definition 8
([24]). Let be the family of all closed, bounded subsets of ʘ. The symbol denotes the Hausdorff distance associated with metric đ, given by
for with
Here, we introduce a new notion as follows:
for and
Throughout this study, we consider the rectangular metric function đ to be a continuously defined mapping.
3. Multivalued Mapping Results
Herein, we explore theorems concerning multivalued coincidence points, fixed points, and best proximity points within (ʘ, đ), a complete rectangular metric space.
Definition 9.
In , a rectangular metric space, let be two closed subsets of ʘ. Consider two mappings : mapping and the self-mapping . These mappings satisfy
Then, the point is termed a best coincidence proximity point of the couple .
Remark 1.
The best coincidence point theorems provide a unified framework encompassing both best proximity and fixed points. In particular, when , each coincidental best proximity point inherently serves as the best proximity point of . Furthermore, if simplifies to a self-map, the concept of the best proximity point seamlessly transforms into the fixed point.
Definition 10.
Consider a multivalued map and a self-map . The couple is known to satisfy the -proximal contraction condition if for and , the following is satisfied:
This implies that
where
Definition 11.
Consider , a multivalued mapping, that is termed a -proximal contraction if for and , the following holds:
This implies that
with
When the mapping is considered, every -proximal contraction naturally transitions into a -proximal contraction. Here, represents the identity mapping.
Theorem 1.
Let be a complete rectangular metric space with closed subsets , fulfilling the -property. Assume continuous mappings and , such that , , and . Assume further that is a continuous and injective mapping, and that the couple satisfies -proximal contraction, along with an alternating distance function . Based on such premises, there is a point termed the coincidence best proximity point for the couple in .
Proof.
Let us take , an arbitrary element. Since is a subset of , and is contained in , there is a point such that
Furthermore, given that , which is a subset of , and that is within this suggests that there is a point such that
Utilizing the -property, we have
Moreover, since the couple meets the condition of -proximal contraction, it follows that
where
so we can say that
If we choose then inequality (1) becomes
which is impossible.
If then inequality (1) will be
since we obtain
Now, let be an arbitrary element in . Since and is contained within , there exists an element such that
Furthermore, given that , which is a subset of , and that is contained within there is an element in such that
Utilizing the -property, we have
Furthermore, since the couple meets the condition of -proximal contraction, it follows that
where
so we can say that
If we choose then inequality (2) becomes
which is impossible. If then inequality (2) will be
since we obtain
Similarly, since and there is , which gives
After selecting , which satisfies the given condition, there exists an element that meets the condition
for all positive integers n, and utilizing the -property, we obtain
Moreover, since the couple meets the condition of -proximal contraction, and by applying Equations (3) and (4), we obtain
where
So, we can say that
If we choose then inequality (5) transforms into
which is not impossible. If then Equation (5) becomes
since we obtain
Therefore, the sequence is monotonically nonincreasing and bounded from below. As a result, there exists such that
Assuming that , with Equations (6) and (7), we have:
Proceeding with the process, we arrive at
As a consequence of the prior equation, we obtain
Using equation () of Definition 7 gives
Again, using equation of Definition 7, there is a , such that
So, we can write it for and as follows:
Hence, we obtain
From this, we have
Since , we have
From these, we obtain
By using (8), we obtain
Now, by taking the limit as , we obtain
Assume that ; from this, the above inequality is given as
From Equation (11), it is evident that there exists an integer such that, for any given ,
Next, we aim to demonstrate that the sequence is Cauchy within the rectangular metric space , which is complete too. Therefore, , we have
Thus, for all positive integers , the above inequality will be as follows:
Thus, the Cauchy sequence converges within the space . Suppose it converges to in , where is a closed set. This implies that the sequence satisfies . Given that are continuous mappings, we conclude that
Thus, is a coincidence proximity point for the couple . □
Example 5.
Take a set with the metric defined as
We see that becomes a complete rectangular metric space. Given that and are nonempty closed subsets of , meeting the -property condition, here, , . Also, we obtain . The map , defined as
and , given as
We see , a subset of , and a subset of Then, meets the condition of -proximal contraction,
for all . Therefore,
with , , and . After few simple steps, we obtain
and
Take function θ as
For , we obtain , ; then, the inequality (12) will be
for all . As a result, all of the Theorem 1’s circumstances are met; here, point 21 is the coincidence proximity point for the couple
Corollary 1.
Let (a complete rectangular metric space) with closed subsets meet the -property and . Let a continuous map with . It follows that if accomplishes the -proximal contraction condition, then it admits a best proximity point.
Proof.
Under the assumption that , where denotes the identity map, the remainder of the proof unfolds in accordance with Theorem 1. □
Observe that in Theorem 1, by setting , we derive the corresponding results presented below.
Corollary 2.
Assume that is a multivalued mapping on a complete rectangular metric space, and that meets the condition of -proximal contraction with the function . Under the mentioned assumptions, a fixed point for is confirmed to exist.
Proof.
Let . Under this assumption, the remaining part directly corresponds to Theorem 1. □
Example 6.
Consider ; then, we can conclude that constitutes a complete rectangular metric space, where the metric function is given as follows:
Also, multivalued mapping is given as
Now, meets the proximal contraction condition
for all . Let the function θ be for .
Let with ; then, , and . Therefore, , and we also obtain
Therefore,
Now, by applying θ, we obtain
and
All of the conditions stated in Corollary 2 are fulfilled, which confirms that 1 is a fixed point for .
4. Single-Valued Mappings Results
This part of the manuscript explores the coincidence proximity point results within the complete rectangular metric spaces, with a particular emphasis on single-valued mappings.
Definition 12.
Let us take two mappings such that the scenario whereby and is termed a proximal contraction if for ,
implying that
where
for all
Definition 13.
Consider a map that is termed to satisfy the proximal contraction condition if for ,
which implies that
where
for all in
While choosing as , -proximal contractions reduce to the standardized form of -proximal contractions.
Theorem 2.
Consider two mappings, and , with , closed subsets of , with the -property, where and . If the couple of continuous maps contains injective mapping , these mappings fulfill the condition of -proximal contraction. Under the mentioned assumptions, a best coincidence proximity point for the couple is confirmed to exist.
Proof.
As single-valued mappings are a special case of multivalued mappings, for and there is , which gives
After selecting , which satisfies the given condition, there exists an element that meets the condition
For all positive integers n, utilizing the -property, we obtain
Moreover, since the couple meets the condition of -proximal contraction, and by applying Equations (14) and (15), we obtain
where
So, we can say that
If we choose then inequality (16) transforms into
which is not impossible. If then Equation (16) becomes
Here, our contraction holds, and the remaining part directly corresponds to Theorem 1. □
Example 7.
Consider the set ; then, becomes a complete rectangular metric space. Here, the metric function is
Suppose that and are two closed subsets of We see that and meets the property, where and . Also, map is
and is
We clearly see that and Now, our aims to prove the couple fulfill the condition of -proximal contraction,
for all . Since
here, and . After routine calculation, we have
and
Here, θ functions as . For and , we calculate , and then inequality (18), given as
Thus, the requirements as per Theorem 2 are met, confirming that 17 serves as the coincidence best proximity point for the couple .
Corollary 3.
Let , with , closed subsets of , satisfying the -property, and the given metric is complete. Additionally, assume that . The mapping admits a proximity point if it is continuous and satisfies the -proximal contraction condition.
Proof.
If we take (here, denotes the identity mapping on ), and , and then there is , which gives
After selecting , which satisfies the given condition, there exists an element that meets the condition
For all positive integers n, utilizing the -property, we obtain
Moreover, since meets the condition of -proximal contraction, and by applying Equations (19) and (20), we obtain
where
So, we can say that
If we choose then inequality (21) transforms into
which is not impossible. If then Equation (21) becomes
Here, our contraction holds, and then, the remaining part directly corresponds to Theorem 1, and we obtain a proximity point. □
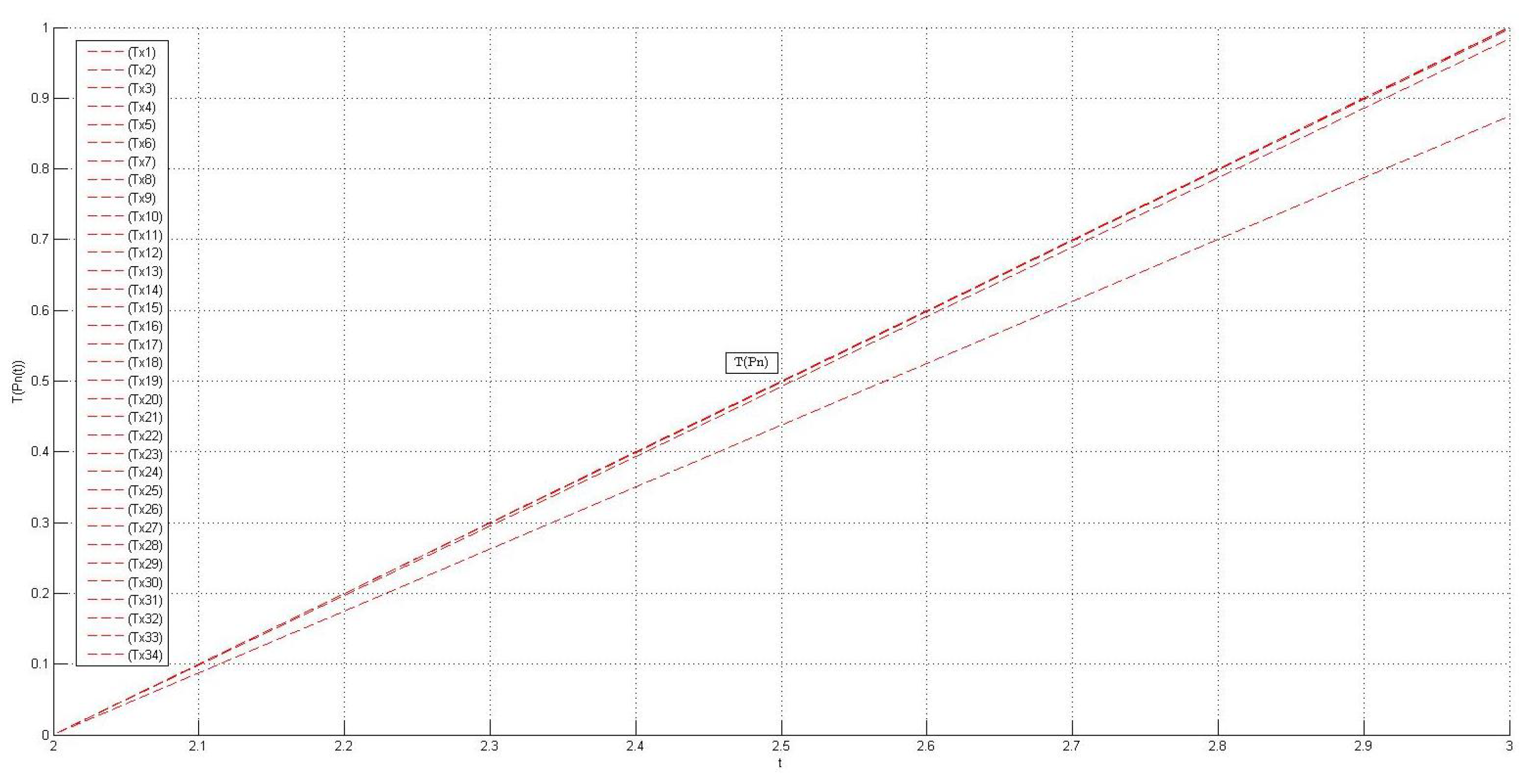
The following example shows that in the best proximity study, we are dealing with two sequences at a time, which is an advantage of best proximity. We show this phenomenon numerically and graphically.
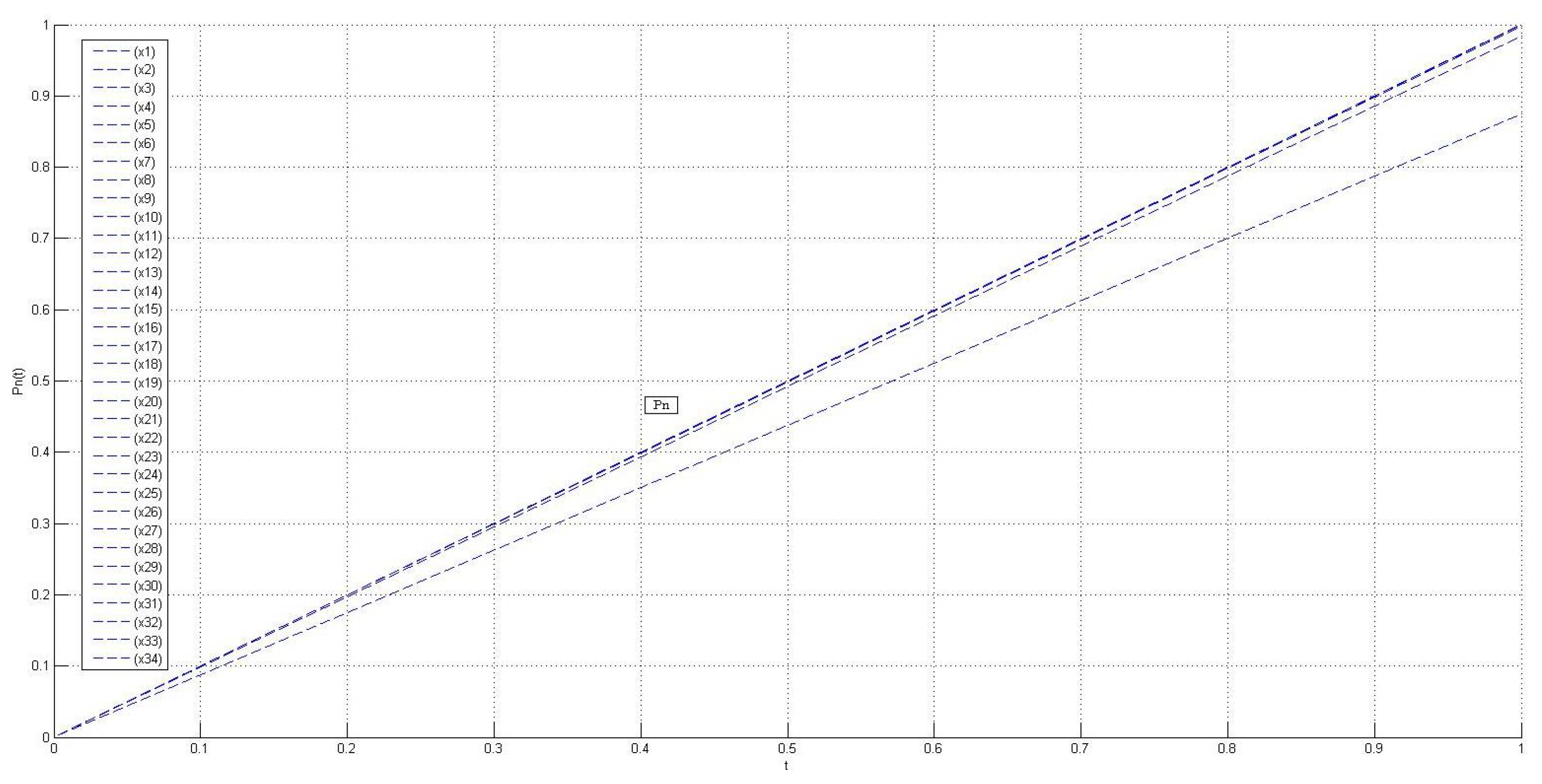
Example 8.

Let us have , and the metric . Let
and
Here, , with and . Now, non-self-mapping is defined as
So, Take , which gives
Now,
Now, taking and implies that
Hence, holds. Now, we show the numerical convergence of both sequences and in Table 1 given below, taking the initial guess .
Table 1.
Convergence of sequences and .
Now, we have the graphical convergence of both sequences, which are generated at the same time and also converge at same time in different places. In Figure 1, we show the convergence of sequence , and in Figure 2, the convergence of .
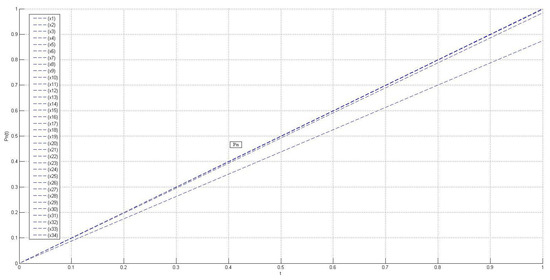
Figure 1.
Convergence behavior of sequence .
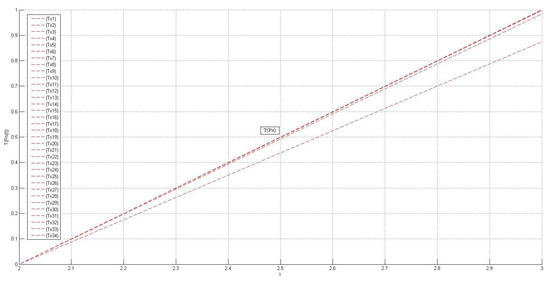
Figure 2.
Convergence behavior of sequence .
5. Fixed Point Results
If we set in Theorem 2 from the earlier section, then we obtain a fixed point and simultaneously fulfill the preceding considerations.
Definition 14.
A map is known to be -contraction, if for , the following holds:
where
Theorem 3.
Let be a self-mapping on (a complete rectangular metric space). If meets the condition of -contraction with , then possesses a fixed point. Here is an alternating distance function.
Proof.
When is considered, and for , there is . Moreover, since meets the condition of -contraction, and by applying equation, we obtain
where
So, Equation (23) becomes
Here, our contraction holds, and then, the remaining part directly corresponds to Theorem 1.
□
Example 9.
: If we take and , the metric is as follows:
and
Here, . We see that meets the rectangular metric conditions but does not fulfill the condition of a metric space. If we take and , then
On the other hand,
which gives
which shows that does not fulfill the metric definition but it meets conditions of the rectangular metric.
Now, define , where , such that
This map meets the contraction condition
for all .
- Case (i): If and , we take and ; then, the distance , with
- Case (ii): If both points are taken from set , then we have two cases. In the first one, we select closely situated elements, whereas, in the second case, the chosen points are more distant from each other.
- (a)
- If and , then đ and
- (b)
- If and , then and
Thus, all requirements mentioned in Theorem 3 are met. So, 1 is clearly a fixed point of .
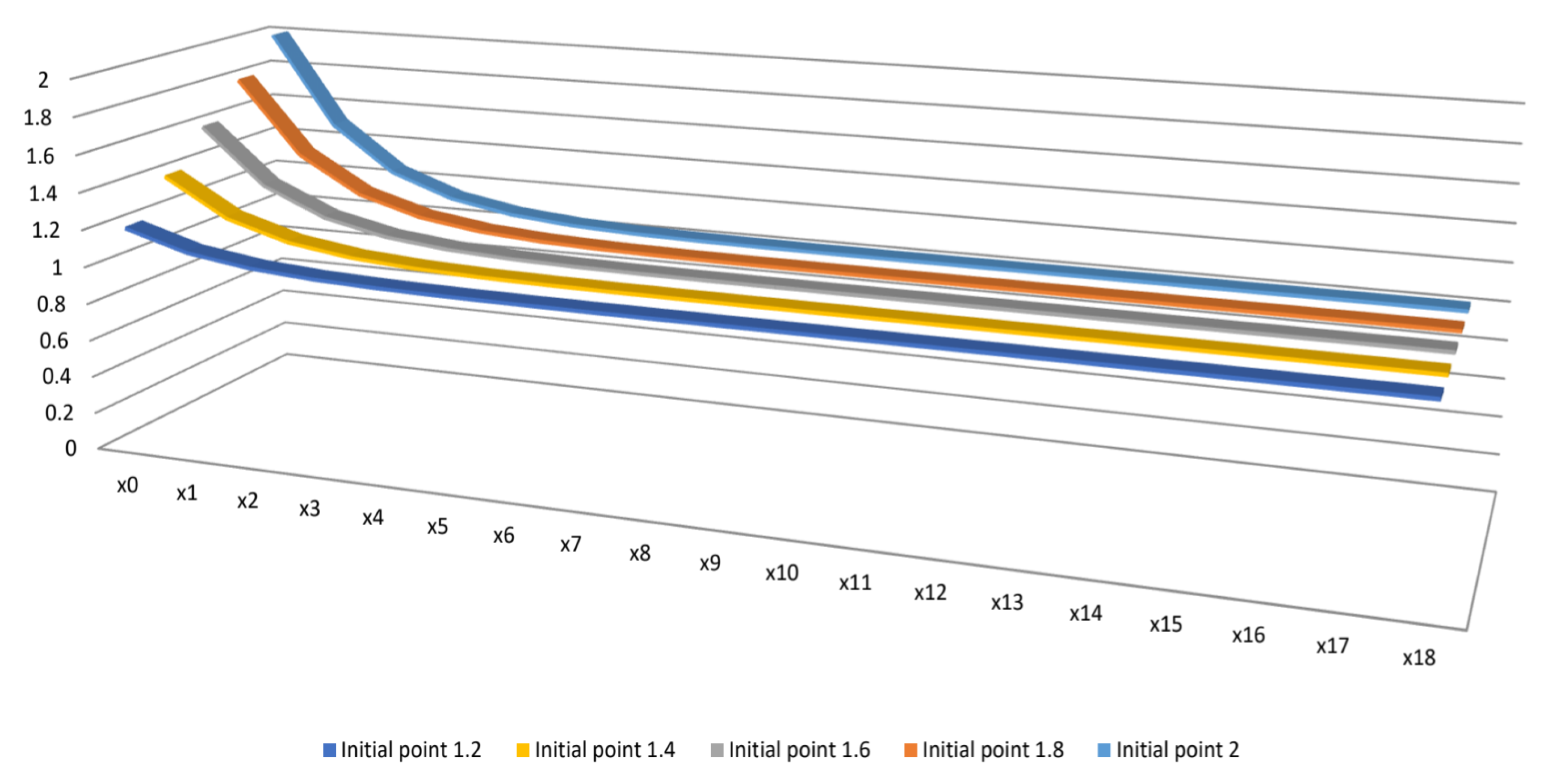
The following analysis investigates the convergence behavior of the sequence by considering different initial guesses. The results presented in Table 2 clearly highlight the distinct convergence behaviors observed in each scenario.
Table 2.
Convergence behavior of sequences with various initial guesses.
The graph below illustrates the behavior of sequences generated from various initial guesses. Figure 3 illustrates the convergence trends of these sequences, offering valuable analytical insights.
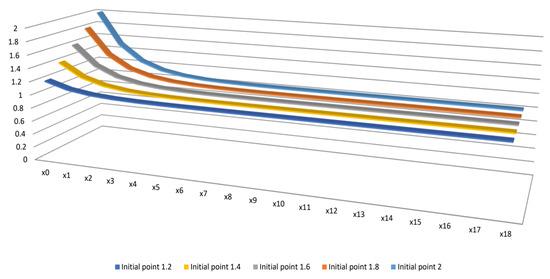
Figure 3.
Convergence behavior with various initial points.
6. Application to Equation of Motion
Fixed point theory has several applications, such as in the hybrid pneumatic–electric-driven climbing robot [25], which features bionic flexible feet and involves nonlinear control systems. Fixed point theory ensures stability and convergence within the neural control framework, facilitating proper limb-to-foot coordination and enhancing the robot’s adaptability and performance in climbing. Additionally, the proposed 3D reconstruction algorithm for bubble mesostructures [26] employs nonlinear imaging techniques, where fixed point theory ensures the stability and convergence of the reconstruction process. To demonstrate the practicality of our results, we apply the proposed generalized contraction to the equation of motion, a classical second-order differential equation in mechanics.
Consider the set , a family of continuous functions defined on . Let , defined by . It is widely acknowledged that constitutes a complete metric space.
Now, let us turn our attention to the following problem.
Problem: Let us consider a scenario where a particle with unit mass m, at time zero, is at rest, such that and . At , a force f begins to act on the particle in the direction of the x-axis, causing its velocity to abruptly change from 0 to 1. Our objective is to determine the position of the particle at time . This can be described by the equation of motion
with the initial conditions and , where is a continuous function.
We can define the Green’s function associated with this equation as
Consider a function, , satisfying the following conditions:
- for all and with .
- There is , which gives , where .
Now, we aim to establish the existence of a solution to the second-order differential equation.
Theorem 4.
Under the given assumptions (1)–(2), the equation of motion possesses a solution within the space .
Proof.
It is a well-established fact that finding a solution to Equation (26) is equivalent to finding that satisfies the associated integral equation.
Let , given by
Now, suppose that such that . So,
Since , . Hence, we obtain
Since , we obtain
and ; then, by performing a simple calculation, we obtain
So, we fulfill the -contraction condition; then, according to Theorem 3, has a unique fixed point, which is the solution to the equation of motion. □
7. Conclusions
We investigate the best coincidence proximity points in the context of rectangular metric space for multivalued maps. We employ the alternating distance function and develop
-type generalized contractions for both single-valued and multi-valued non-self-maps to examine the existence of these best coincidence, best proximity, and fixed point results. To extend the applicability of our core findings, we give examples of single-valued and multi-valued mappings. Furthermore, we showcase the practical importance of our research by applying our findings to solve problems related to the equation of motion. These results have significant implications in both the theoretical and practical realms, assisting researchers in the study of fixed point theory and addressing difficulties in mechanical and engineering disciplines.
Future directions:
One can extend this concept towards the framework of -contractions [27], which represents a further generalization of several types of contraction mappings. Future research in fixed point theory can greatly enhance stability and performance across various fields. In human-exoskeleton control, fixed point methods can stabilize mode switching in multimodal systems [28]. For electrohydrodynamic flows, they can ensure the convergence of lattice Boltzmann simulations [29]. In structural mechanics, fixed point theory can improve the stability of finite element models for reinforced concrete under torsional load [30,31].
Author Contributions
M.Z., F.U.D., L.-I.C. and D.B. were equally involved in the conceptualization, design, and coordination of this study. They contributed to drafting the manuscript, aligning the sequence, and ensuring the accuracy of the content. All authors have read and agreed to the published version of the manuscript.
Funding
This study was conducted without any external financial support.
Data Availability Statement
This research is entirely theoretical, with no involvement of datasets or empirical data collection. The findings and conclusions are solely based on mathematical analysis and computational simulations.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Khan, I.; Shaheryar, M.; Din, F.U.; Ishtiaq, U.; Popa, I.L. Fixed-Point Results in Fuzzy S-Metric Space with Applications to Fractals and Satellite Web Coupling Problem. Fractal Fract. 2025, 9, 164. [Google Scholar] [CrossRef]
- Zahid, M.; Ud Din, F.; Shah, K.; Abdeljawad, T. Fuzzy fixed point approach to study the existence of solution for Volterra type integral equations using fuzzy Sehgal contraction. PLoS ONE 2024, 19, e0303642. [Google Scholar] [CrossRef] [PubMed]
- Basha, S.; Veeramani, P. Best proximity pair theorems for multi-functions with open fibres. J. Approx. Theory 2000, 103, 119–129. [Google Scholar] [CrossRef]
- Basha, S.; Veeramani, P. Best approximations and best proximity pairs. Acta Sci. Math. 1997, 63, 289–300. [Google Scholar]
- Eldred, A.A.; Veeramani, P. Existence and convergence of best proximity points. J. Math. Anal. Appl. 2006, 323, 1001–1006. [Google Scholar] [CrossRef]
- Ishtiaq, U.; Jahangeer, F.; Kattan, D.A.; Argyros, I.K. Generalized Common Best Proximity Point Results in Fuzzy Metric Spaces with Application. Symmetry 2023, 15, 1501. [Google Scholar] [CrossRef]
- Younis, M.; Ahmad, H.; Shahid, W. Best proximity points for multivalued mappings and equation of motion. J. Appl. Anal. Comp. 2024, 14, 298–316. [Google Scholar] [CrossRef]
- Komal, S.; Hussain, A.; Sultana, N.; Kumam, P. Coincidence best proximity points for Geraghty type proximal cyclic contractions. J. Math. Comp. Sci. 2018, 18, 98–114. [Google Scholar] [CrossRef]
- Jleli, M.; Samet, B. A new generalization of the Banach contraction principle. J. Inequal. Appl. 2014, 2014, 38. [Google Scholar] [CrossRef]
- Zahid, M.; Din, F.U.; Younis, M.; Ahmad, H.; Öztürk, M. Some Results on Multivalued Proximal Contractions with Application to Integral Equation. Mathematics 2024, 12, 3488. [Google Scholar] [CrossRef]
- Sametric, B.; Vetro, C.; Vetro, P. Fixed point theorem for α-ψ-contractive type mappings. Nonlinear Anal. 2012, 75, 2154–2165. [Google Scholar]
- Feng, G.; Yu, S.; Wang, T.; Zhang, Z. Discussion on the weak equivalence principle for a Schwarzschild gravitational field based on the light-clock model. Ann. Phys. 2025, 473, 169903. [Google Scholar] [CrossRef]
- Jin, Y.; Lu, G.; Sun, W. Genuine multipartite entanglement from a thermodynamic perspective. Phys. Rev. A 2024, 109, 042422. [Google Scholar] [CrossRef]
- Liu, X.; Lou, S.; Dai, W. Further results on “System identification of nonlinear state-space models”. Automatica 2023, 148, 110760. [Google Scholar] [CrossRef]
- Gao, Q.; Deng, Z.; Ju, Z.; Zhang, T. Dual-hand motion capture by using biological inspiration for bionic bimanual robot teleoperation. Cyb. Biol. Syst. 2023, 4, 52. [Google Scholar] [CrossRef]
- Hou, Q.; Li, Y.; Singh, V.P.; Sun, Z. Physics-informed neural network for diffusive wave model. J. Hydrol. 2024, 637, 131261. [Google Scholar] [CrossRef]
- Peng, L.; Liang, Y.; He, X. Transfers to Earth-Moon triangular libration points by Sun-perturbed dynamics. Adv. Space Res. 2025, 75, 2837–2855. [Google Scholar] [CrossRef]
- Shi, Q.; Sun, Y.; Saanouni, T. On the growth of Sobolev norms for Hartree equation. J. Evol. Equ. 2025, 25, 13. [Google Scholar] [CrossRef]
- Alves, S.; Babcinschi, M.; Silva, A.; Neto, D.; Fonseca, D.; Neto, P. Integrated design fabrication and control of a bioinspired multimaterial soft robotic hand. Cybor. Biol. Syst. 2023, 4, 51. [Google Scholar] [CrossRef]
- Frechet, M.M. Sur quelques points du calcul fonctionnel. Rend. Circ. Mat. Palermo 1906, 22, 1–72. [Google Scholar] [CrossRef]
- Branciari, A. A fixed point theorem of Banach-Caccioppoli type on a class of generalized metric spaces. Publ. Math. Debr. 2000, 57, 31–37. [Google Scholar] [CrossRef]
- Sankar Raj, V. A best proximity point theorem for weakly contractive non-self-mappings. Nonlinear Anal. 2011, 74, 4804–4808. [Google Scholar] [CrossRef]
- Khan, M.S.; Swaleh, M.; Sessa, S. Fixed point theorems by altering distances between the points. Bull. Aust. Math. Soc. 1984, 30, 1–9. [Google Scholar] [CrossRef]
- Rockafellar, T.R.; Wets, R.J.V. Variational Analysis; Springer: Berlin, Germany, 2005. [Google Scholar]
- Wang, B.; Wang, Z.; Song, Y.; Zong, W.; Zhang, L.; Ji, K.; Dai, Z. GA neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion. Cyb. Biol. Syst. 2023, 4, 8. [Google Scholar]
- Song, Y.; Huang, G.; Yin, J.; Wang, D. Three-dimensional reconstruction of bubble geometry from single-perspective images based on ray tracing algorithm. Meas. Sci. Technol. 2025, 36, 016010. [Google Scholar] [CrossRef]
- Erhan, I.M.; Karapınar, E.; Sekulić, T. Fixed points of (ψ,ϕ) contractions on rectangular metric spaces. Fixed Point Theory Appl. 2012, 2012, 138. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, X.; Lin, J.; Lin, B.; Huang, Y. Experimental and numerical study on the torsional behavior of rectangular hollow reinforced concrete columns strengthened By CFRP. Structures 2024, 70, 107690. [Google Scholar] [CrossRef]
- Xiong, F.; Wang, L.; Huang, J.; Luo, K. A Thermodynamically Consistent Phase-Field Lattice Boltzmann Method for Two-Phase Electrohydrodynamic Flows. J. Sci. Comp. 2025, 103, 34. [Google Scholar] [CrossRef]
- Kou, J.; Wang, Y.; Chen, Z.; Shi, Y.; Guo, Q. Gait Planning and Multimodal Human-Exoskeleton Cooperative Control Based on Central Pattern Generator. IEEE/ASME Tran. Mech. 2024, 1–11. [Google Scholar] [CrossRef]
- Kou, J.; Wang, Y.; Chen, Z.; Shi, Y.; Guo, Q.; Xu, M. Flexible assistance strategy of lower limb rehabilitation exoskeleton based on admittance model. Sci. China Technol. Sci. 2024, 67, 823–834. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).