
Stabilization and Synchronization of a New 3D Complex Chaotic System via Adaptive and Active Control Methods



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The 3D Chaotic System and Its Equilibrium Points
3. Stability Analysis of the 3D Chaotic System
3.1. Active Control
3.2. Adaptive Control
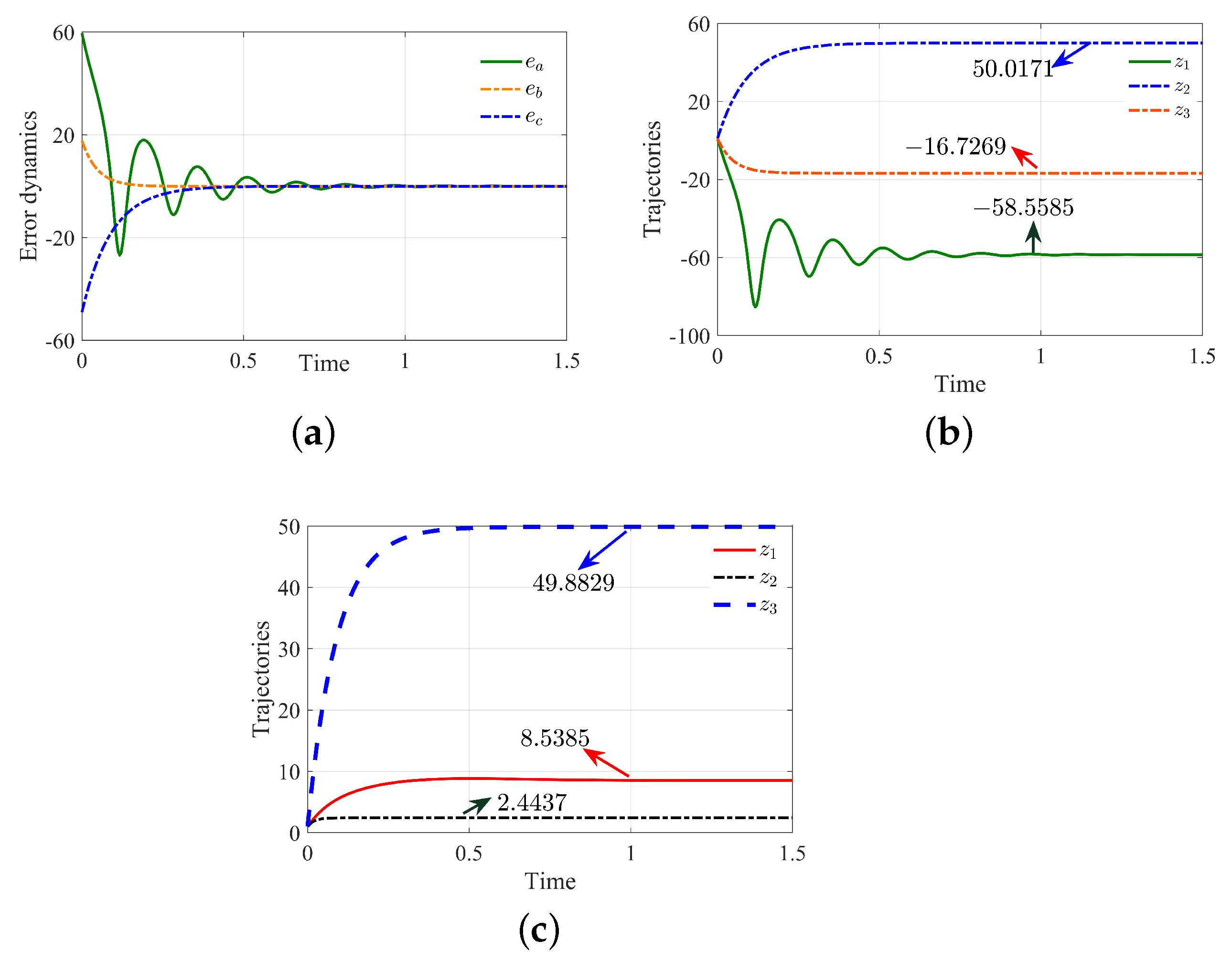
3.3. Stability: Results and Discussion
4. Synchronization of the 3D Chaotic System
4.1. Active Control Synchronization
4.2. Adaptive Synchronization
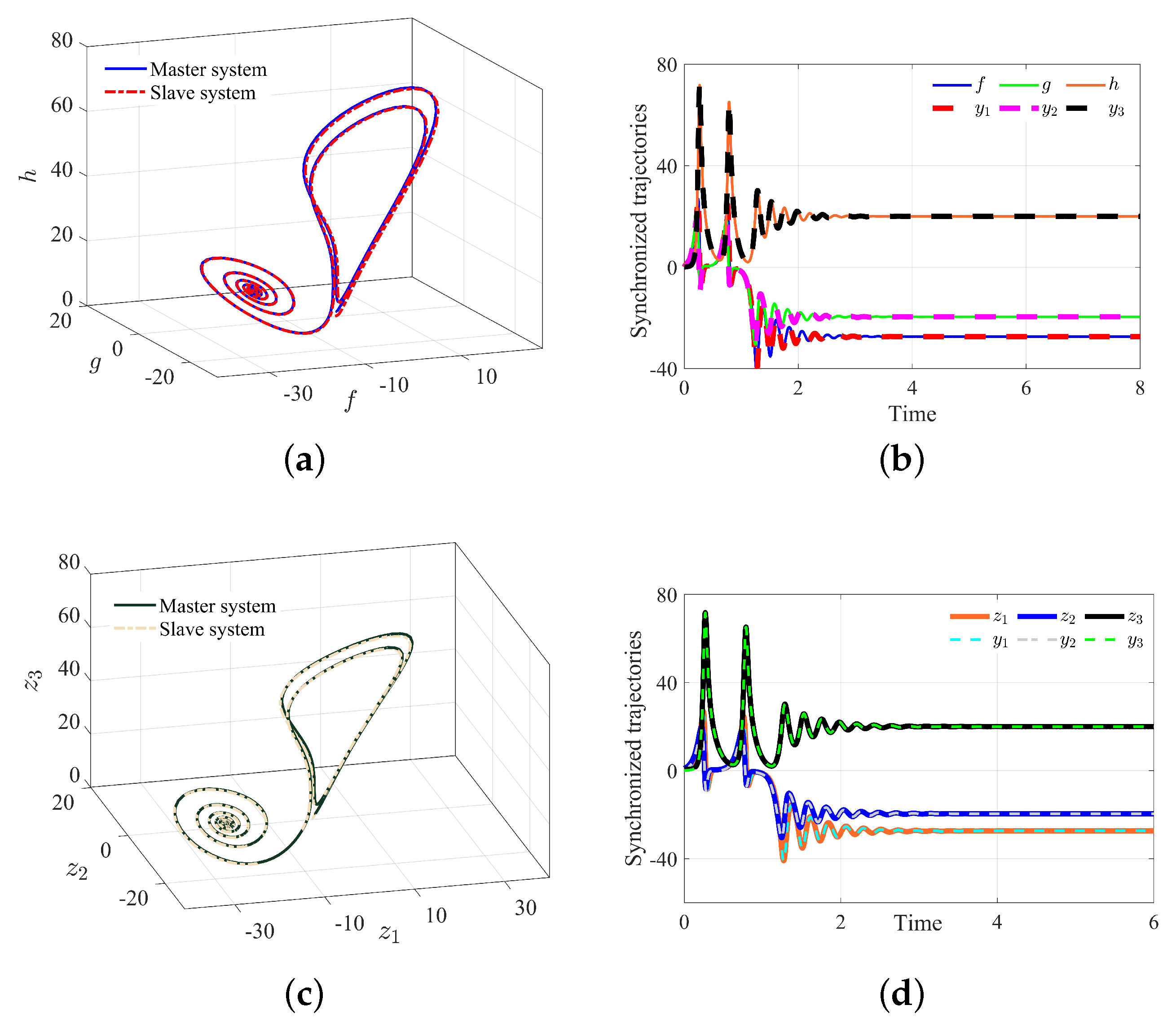
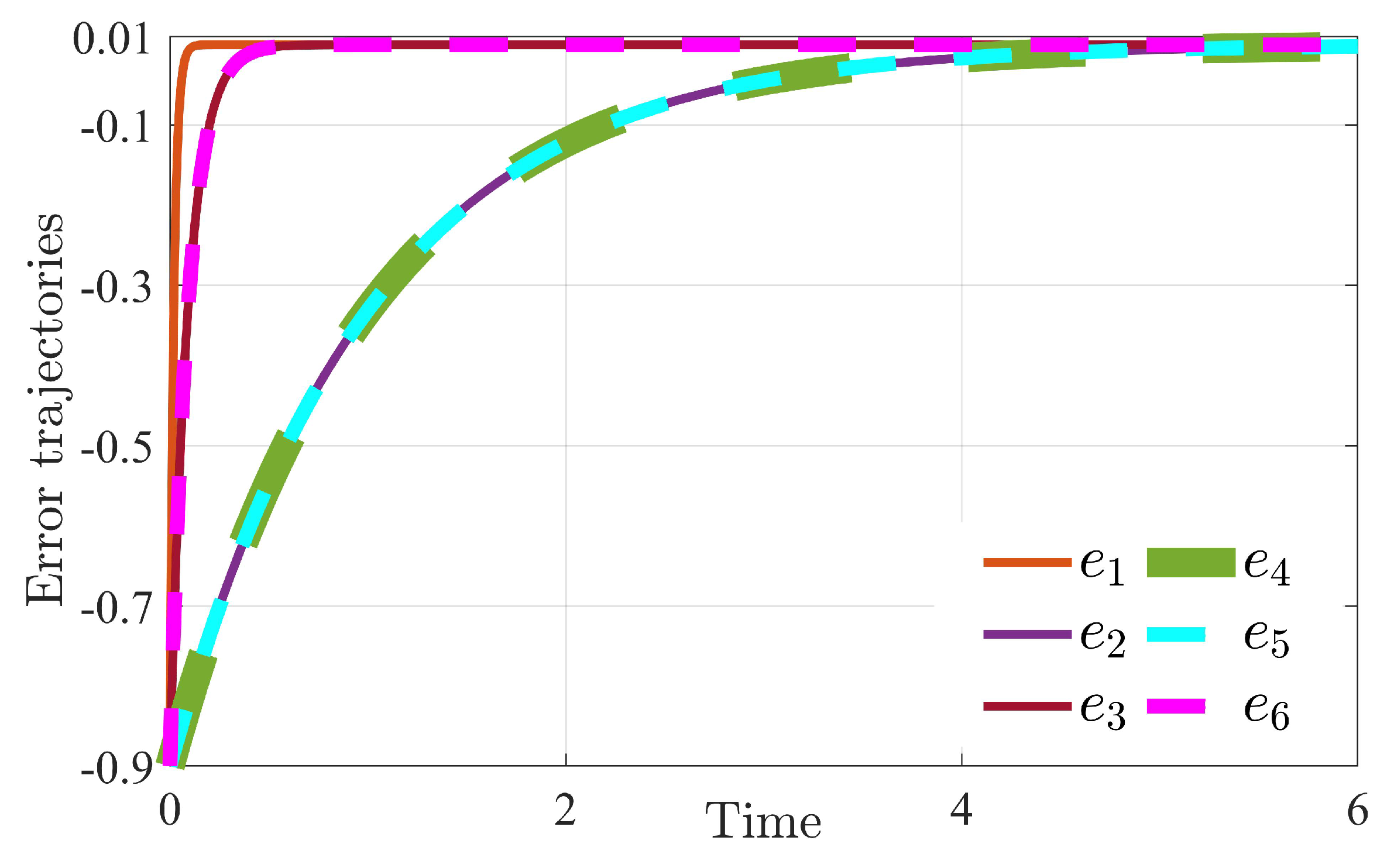
4.3. Synchronization: Discussion and Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, T.; Xing, H.; Xu, X.; Wang, Z.; Zhao, Y. Chaos-based coverage path planning framework for mobile robots and its digital signal processing implementation. Phys. Scr. 2024, 99, 125293. [Google Scholar] [CrossRef]
- Wang, N.; Marwan, M.; Yang, Y.; Chen, X.; Herbert, H.C.I.; Xu, Q. Designing nest-fold system via dual-route fractal process and application in chaotic mobile robot. IEEE Internet Things J. 2024, 12, 9206–9217. [Google Scholar] [CrossRef]
- Manhil, M.M.; Jamal, R.K. A novel secure communication system using Duffing’s chaotic model. Multimed. Tools Appl. 2024, 83, 89681–89694. [Google Scholar] [CrossRef]
- Gokyildirim, A.; Akgul, A.; Calgan, H.; Demirtas, M. Parametric fractional-order analysis of Arneodo chaotic system and microcontroller-based secure communication implementation. AEU-Int. J. Electron. Commun. 2024, 175, 155080. [Google Scholar] [CrossRef]
- Yan, S.; Zhang, H.; Jiang, D. Multi-wing chaotic system based on smooth function and its predefined time synchronization. Commun. Nonlinear Sci. Numer. Simul. 2024, 138, 108178. [Google Scholar] [CrossRef]
- Marwan, M.; Han, M.; Dai, Y.; Cai, M. The impact of global dynamics on the fractals of a Quadrotor Unmanned Aerial Vehicle (QUAV) chaotic system. Fractals 2024, 32, 2450043. [Google Scholar] [CrossRef]
- Matouk, A.E. Applications of the generalized gamma function to a fractional-order biological system. Heliyon 2023, 9, e18645. [Google Scholar] [CrossRef]
- Polyanovsky, V.O.; Kamenev, I.G. On stable and quasi-chaotic regimes in a one-dimensional unimodal mapping obtained by modeling the dynamics of a biological population. J. Phys. Conf. Ser. 2024, 2701, 012058. [Google Scholar] [CrossRef]
- Bi, H.; Qi, G.; Hu, J. Modeling and analysis of chaos and bifurcations for the attitude system of a quadrotor unmanned aerial vehicle. Complexity 2019, 2019, 6313925. [Google Scholar] [CrossRef]
- Ali, A.; Ahmad, J.; Javed, S.; Rehman, S. Analysis of chaotic structures, bifurcation and soliton solutions to fractional Boussinesq model. Phys. Scr. 2023, 98, 075217. [Google Scholar] [CrossRef]
- Kocamaz, U.E.; Cevher, B.; Uyaroglu, Y. Control and synchronization of chaos with sliding mode control based on cubic reaching rule. Chaos Solitons Fractals 2017, 105, 92–98. [Google Scholar] [CrossRef]
- Johansyah, M.D.; Sambas, A.; Mobayen, S.; Vaseghi, B.; Al-Azzawi, S.F.; Sukono; Sulaiman, I.M. Dynamical analysis and adaptive finite-time sliding mode control approach of the financial fractional-order chaotic system. Mathematics 2022, 11, 100. [Google Scholar] [CrossRef]
- Saeed, N.A.; Saleh, H.A.; El-Ganaini, W.A.; Kamel, M.; Mohamed, M.S. On a New Three-Dimensional Chaotic System with Adaptive Control and Chaos Synchronization. Shock Vib. 2023, 2023, 1969500. [Google Scholar] [CrossRef]
- Rahman, Z.A.; Al-Kashoash, H.A.; Ramadhan, S.M.; Al-Yasir, Y.I. Adaptive control synchronization of a novel memristive chaotic system for secure communication applications. Inventions 2019, 4, 30. [Google Scholar] [CrossRef]
- Marwan, M.; Ahmad, S.; Aqeel, M.; Sabir, M. Control analysis of Rucklidge chaotic system. J. Dyn. Syst. Meas. Control 2019, 141, 041010. [Google Scholar] [CrossRef]
- Yu, Z.; Zhao, F.; Ding, S.; Chen, X. Adaptive pre-assigned finite-time control of uncertain nonlinear systems with unknown control gains. Appl. Math. Comput. 2022, 417, 126784. [Google Scholar] [CrossRef]
- Dou, W.; Ding, S.; Chen, X. Practical adaptive finite-time stabilization for a class of second-order systems. Appl. Math. Comput. 2022, 431, 127340. [Google Scholar] [CrossRef]
- Cheng, L.; Lin, Y.; Hou, Z.; Tan, M.; Huang, J.; Zhang, W. Adaptive tracking control of hybrid machines: A closed-chain five-bar mechanism case. IEEE/ASME Trans. Mech. 2010, 16, 1155–1163. [Google Scholar] [CrossRef]
- Barzegar, A.; Lee, D.-J. Deep reinforcement learning-based adaptive controller for trajectory tracking and altitude control of an aerial robot. Appl. Sci. 2022, 12, 4764. [Google Scholar] [CrossRef]
- Jai, A.A.; Ouassaid, M. Three novel machine learning-based adaptive controllers for a photovoltaic shunt active power filter performance enhancement. Sci. Afr. 2024, 24, e02171. [Google Scholar]
- He, G.; Choudhary, Y.; Shi, G. Self-Supervised Meta-Learning for All-Layer DNN-Based Adaptive Control with Stability Guarantees. arXiv 2024, arXiv:2410.07575. [Google Scholar]
- Berkenkamp, F.; Turchetta, M.; Schoellig, A.P.; Krause, A. Safe model-based reinforcement learning with stability guarantees. Adv. Neural Inf. Process. Syst. 2017, 30, 1–11. [Google Scholar]
- Aguilar-Lopez, R.; Martínez-Guerra, R. Chaos suppression via observer-based active control scheme: Application to Duffing’s oscillator. Chaos Solitons Fractals 2007, 32, 1887–1897. [Google Scholar] [CrossRef]
- Roldán-Caballero, A.; Pérez-Cruz, J.H.; Hernandez-Marquez, E.; Garcia-Sanchez, J.R.; Ponce-Silva, M.; Rubio, J.D.J.; Mendoza-Chegue, A. Synchronization of a new chaotic system using adaptive control: Design and experimental implementation. Complexity 2023, 2023, 2881192. [Google Scholar] [CrossRef]
- Kumar, A.; Handa, H. PI Sliding Mode Control and Active Control Based Stabilization Scheme for a Chaotic System Having Single Stable Equilibrium and its Circuit Implementation. In Proceedings of the 2024 5th International Conference for Emerging Technology (INCET), Belgaum, India, 24–26 May 2024; pp. 1–7. [Google Scholar]
- Akter, M.T.; Tarammim, A.; Hussen, S. Chaos control and synchronization of modified Lorenz system using active control and backstepping scheme. Waves Random Complex Media 2023, 16, 1–20. [Google Scholar] [CrossRef]
- Tarammim, A.; Akter, M.T. A comparative study of synchronization methods of rucklidge chaotic systems with design of active control and backstepping methods. Int. J. Mod. Nonlinear Theory Appl. 2022, 11, 31–51. [Google Scholar] [CrossRef]
- Iqbal, S.; Wang, J. A novel fractional-order 3-D chaotic system and its application to secure communication based on chaos synchronization. Phys. Scr. 2025, 100, 025243. [Google Scholar] [CrossRef]
- Tarammim, A.; Akter, M.T. Shimizu–Morioka’s chaos synchronization: An efficacy analysis of active control and backstepping methods. Front. Appl. Math. Stat. 2023, 9, 1100147. [Google Scholar] [CrossRef]
- Pakiriswamy, S.; Vaidyanathan, S. Generalized projective synchronization of three-scroll chaotic systems via active control. In Proceedings of the 2012 International Conference on Computer Science and Information Technology, Bangalore, India, 2–4 January 2012; pp. 146–155. [Google Scholar]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Driving systems with chaotic signals. Phys. Rev. A 1991, 44, 2374. [Google Scholar] [CrossRef]
- Wang, J.; Ye, X.; Si, W. Robust ISS-satisfying fuzzy control of chaotic systems. In Proceedings of the Sixth International Conference on Intelligent Systems Design and Applications, Jinan, China, 16–18 October 2006; Volume 1, pp. 293–298. [Google Scholar]
- Wang, X.; Liu, X.; She, K.; Zhong, S. Pinning impulsive synchronization of complex dynamical networks with various time-varying delay sizes. Nonlinear Anal. Hybrid Syst. 2017, 26, 307–318. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.; Kamal, N.A.; Koubaa, A. Robust Kinematic Control of Unmanned Aerial Vehicles with Non-holonomic Constraints. Proc. Int. Conf. Adv. Intell. Syst. Inform. 2020, 1261, 839–850. [Google Scholar]
- Wang, L.; Dong, W.; Ding, Q. A new fixed-time sliding mode control scheme for synchronization of chaotic systems. Phys. Scr. 2024, 99, 095240. [Google Scholar] [CrossRef]
- Marwan, M.; Mehboob, M.; Ahmad, S.; Aqeel, M. Hopf bifurcation of forced Chen system and its stability via adaptive control with arbitrary parameters. Soft Comput. 2020, 24, 4333–4341. [Google Scholar] [CrossRef]
- Jia, T.; Chen, X.; He, L.; Zhao, F.; Qiu, J. Finite-time synchronization of uncertain fractional-order delayed memristive neural networks via adaptive sliding mode control and its application. Fractal Fract. 2022, 6, 502. [Google Scholar] [CrossRef]
- Ogorzalek, M.J. Taming chaos. I. Synchronization. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1993, 40, 693–699. [Google Scholar] [CrossRef]
- Zeng, Y.; Singh, S.N. Adaptive control in Lorenz system. Int. J. Dyn. Control 1998, 8, 255–267. [Google Scholar]
- Sambas, A.; Benkouider, K.; Kaçar, S.; Ceylan, N.; Vaidyanathan, S.; Sulaiman, I.M.; Mohamed, M.A.; Ayob, A.F.M.; Muni, S.S. Dynamic Analysis and Circuit Design of a New 3D Highly Chaotic System and its Application to Pseudo Random Number Generator (PRNG) and Image Encryption. SN Comput. Sci. 2024, 5, 420. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Y.; Li, X.; Yang, J. Active Control of Dynamic Behaviors of Graded Graphene Reinforced Cylindrical Shells with Piezoelectric Actuator/Sensor Layers. Appl. Math. Model. 2020, 82, 252–270. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Yang, C.; Wu, D. A Novel Interval Dynamic Reliability Computation Approach for the Risk Evaluation of Vibration Active Control Systems Based on PID Controllers. Appl. Math. Model. 2021, 92, 422–446. [Google Scholar] [CrossRef]
- Qin, G.; Wu, H.; Cheng, Y.; Pan, H.; Zhao, W.; Shi, S.; Song, Y.; Ji, A. Adaptive Trajectory Control of an Under-Actuated Snake Robot. Appl. Math. Model. 2022, 106, 756–769. [Google Scholar] [CrossRef]
- Guo, X.; Wang, H.; Liu, H. Adaptive Sliding Mode Control with Disturbance Estimation for Hydraulic Actuator Systems and Application to Rock Drilling Jumbo. Appl. Math. Model. 2024, 136, 115637. [Google Scholar] [CrossRef]
- He, Y.; Yang, M.; Zhao, X.; He, C.; Chen, Y.-H.; Li, D.; Huang, J. Adaptive Control Scheme for Cooperative Transport Systems Navigation Under Uncertainty. Appl. Math. Model. 2025, 138, 115778. [Google Scholar] [CrossRef]
- Fiori, S. A control-theoretic approach to the synchronization of second-order continuous-time dynamical systems on real connected Riemannian manifolds. SIAM J. Control Optim. 2020, 58, 787–813. [Google Scholar] [CrossRef]
- Rieger, C.G.; David, I.G.; McQueen, M.A. Resilient control systems: Next generation design research. In Proceedings of the 2009 2nd Conference on Human System Interactions, Catania, Italy, 21–23 May 2009. [Google Scholar]
- Wei, D.; Ji, K. Resilient industrial control system (RICS): Concepts, formulation, metrics, and insights. In Proceedings of the 2010 3rd International Symposium on Resilient Control Systems, Idaho Falls, ID, USA, 10–12 August 2010. [Google Scholar]
- Zhang, W.J.; Van Luttervelt, C.A. Toward a resilient manufacturing system. CIRP Ann. 2011, 60, 469–472. [Google Scholar] [CrossRef]
- Zhang, W.; Lin, Y. On the principle of design of resilient systems–application to enterprise information systems. Enterp. Inf. Syst. 2010, 4, 99–110. [Google Scholar] [CrossRef]
- Soliman, H.M.; Elshafei, A.L.; Shaltout, A.A.; Morsi, M.F. Robust power system stabiliser. IEE Proc.-Gener. Transm. Distrib. 2000, 147, 285–291. [Google Scholar] [CrossRef]
- Liu, C.C.; Jung, J.; Heydt, G.T.; Vittal, V.; Phadke, A.G. The strategic power infrastructure defense (SPID) system. A conceptual design. IEEE Control Syst. Mag. 2000, 20, 40–52. [Google Scholar]
- Leonessa, A.; Haddad, W.M.; Chellaboina, V. Hierarchical Nonlinear Switching Control Design with Applications to Propulsion Systems; Springer Science & Business Media: London, UK, 2000. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loudahi, L.; Yuan, J.; Dehbi, L.; Osman, M. Stabilization and Synchronization of a New 3D Complex Chaotic System via Adaptive and Active Control Methods. Axioms 2025, 14, 383. https://doi.org/10.3390/axioms14050383
Loudahi L, Yuan J, Dehbi L, Osman M. Stabilization and Synchronization of a New 3D Complex Chaotic System via Adaptive and Active Control Methods. Axioms. 2025; 14(5):383. https://doi.org/10.3390/axioms14050383
Chicago/Turabian StyleLoudahi, Lamia, Jing Yuan, Lydia Dehbi, and Mawia Osman. 2025. "Stabilization and Synchronization of a New 3D Complex Chaotic System via Adaptive and Active Control Methods" Axioms 14, no. 5: 383. https://doi.org/10.3390/axioms14050383
APA StyleLoudahi, L., Yuan, J., Dehbi, L., & Osman, M. (2025). Stabilization and Synchronization of a New 3D Complex Chaotic System via Adaptive and Active Control Methods. Axioms, 14(5), 383. https://doi.org/10.3390/axioms14050383