Abstract
To address the challenge of low trajectory tracking accuracy for underactuated unmanned underwater vehicles (UUVs) under external disturbances, this study proposes a method integrating backstepping control with improved active disturbance rejection control (IADRC), which enhances high-precision trajectory tracking performance for UUV systems. Firstly, a five-degree-of-freedom dynamic model is established according to the symmetrical structure characteristics of an underactuated UUV, and virtual control inputs are designed using the backstepping method to address the underactuated characteristics. To improve convergence speed and tracking accuracy, a nonsingular terminal sliding mode control (NTSMC) is incorporated into the ADRC framework. Additionally, a parameter-adaptive tracking differentiator (PATD) is developed to mitigate the “differential explosion” problem inherent in backstepping virtual control inputs. A model-assisted extended state observer (ESO) is also designed to accurately estimate system disturbances. Stability analysis, grounded in Lyapunov theory, rigorously proves that all tracking errors converge asymptotically to a small bounded neighborhood of the origin. Simulation results demonstrate the effectiveness and superiority of the proposed control strategy.
1. Introduction
With advances in science and technology, human exploration and development of the oceans have become increasingly sophisticated. As a type of marine equipment, unmanned underwater vehicles (UUVs) possess distinct advantages, including low production costs, high maneuverability, and excellent stealth capabilities. These unique features have garnered significant research interest and attention [1,2]. UUVs can operate in deep-sea environments inaccessible to humans, enabling widespread applications in areas such as scientific research expeditions and resource exploration. They provide valuable data acquisition capabilities, supplying crucial research materials for scientific studies [3,4,5]. Furthermore, UUVs offer significant potential for applications in shallow-water environments. In such regions, UUVs can perform critical scientific research tasks, including marine sample collection and seabed exploration [6,7]. Contemporary UUVs predominantly manifest two distinct configurations: fully actuated and underactuated systems. Underactuation denotes control architectures characterized by the absence of direct actuation in specific degrees of freedom, permitting explicit command authority solely over selected motion directions while necessitating dependence on dynamic coupling for residual directional motions. Contrasted with fully actuated paradigms where control inputs dimensionally correspond to motion degrees of freedom, underactuated systems exhibit significantly amplified control complexity when tracking time-varying trajectories. Consequently, advancing trajectory tracking control methodologies for underactuated UUVs to achieve rapid and precise tracking performance constitutes a critical research imperative [8].
Recent research has extensively investigated two-dimensional trajectory tracking control for underactuated UUVs, yielding numerous advanced control methodologies [9,10]. Representative approaches comprise sliding mode control [11], adaptive control [12], and neural network control [13], as well as fuzzy logic control [14]. However, in three-dimensional trajectory tracking, actuator limitations inducing dynamic constraints combined with the nonholonomic nature of underactuated UUVs render independent decoupling control unfeasible [15]. Current research on three-dimensional trajectory tracking control remains limited. Although limited studies have achieved three-dimensional trajectory tracking, persistent issues exist, including control system oscillation and progressive accuracy deterioration during prolonged operation [16].
Numerous researchers have employed classical methods, such as local linearization and input–output decoupling, to design trajectory tracking controllers for UUVs [17]. However, these approaches typically yield suboptimal closed-loop performance and provide only local stability results, confined to specific operating conditions. The backstepping approach entails decomposing a nonlinear system into subsystems of lower dimensions than the system order. For each subsystem, it progressively designs Lyapunov functions and virtual control laws, ensuring the stability of these Lyapunov functions through corresponding virtual controllers, ultimately achieving stabilization of the entire system. Therefore, backstepping control offers a compelling alternative to address these limitations. Li et al. [18] defined a spatial error metric and utilized backstepping to derive a non-decoupled controller, ensuring convergence of the tracking error to a small neighborhood of the origin. Nevertheless, due to the inherent characteristics of the backstepping technique, complete error elimination within finite time cannot be achieved.
Additionally, sliding mode control (SMC) exhibits strong robustness against time-varying parameters and represents another methodology for 3D trajectory tracking of UUVs [19,20,21,22,23]. Elmokadem et al. [19] proposed a classical sliding mode controller (SMC) for trajectory tracking in underactuated UUVs. This controller demonstrates tracking capability against generalized disturbances with guaranteed finite-time convergence. However, significant trajectory deviations occur during circular path tracking tasks. Yan et al. [20] introduced an adaptive integral sliding mode controller (AISMC) for enhanced trajectory tracking in underactuated UUVs, effectively addressing trajectory deviations associated with classical SMC under uncertain dynamics and unknown disturbances. However, control input chattering caused by the limitation of SMC compromises trajectory smoothness during operation. Han J. [24] introduced active disturbance rejection control (ADRC), a methodology demonstrating superior disturbance rejection capacity and robust system stabilization capabilities. This technique could effectively address limitations inherent in both backstepping approaches and sliding mode control (SMC) [25]. Xu et al. [26] designed a control algorithm combining NTSMC for permanent magnet AC servo systems. By embedding NTSMC into the ADRC framework, they utilized ESO to accurately estimate system disturbances and states, while leveraging NTSMC’s fast convergence to reduce chattering in sliding mode control, thereby enhancing disturbance rejection and dynamic response. However, this study primarily focused on a specific motor system, with limited discussion on its adaptability to other nonlinear systems. Yan et al. [27] developed an enhanced ADRC framework by integrating cascaded ESO (CESO) with adaptive gain tuning for nonlinear systems. Their approach optimized TD to improve transient performance and employed a CESO to estimate and compensate for external disturbances effectively. However, the method’s reliance on precise model assumptions limited its applicability in highly uncertain environments with strong inter-channel coupling.
To address the limitations inherent in the aforementioned methods, this paper presents a hybrid control scheme integrating backstepping with IADRC to achieve high-precision tracking of three-dimensional trajectories for underactuated UUVs. The control strategy consists of two steps: Firstly, a virtual velocity command is constructed based on the backstepping method to resolve the kinematic coupling inherent in underactuated systems. Subsequently, non-singular terminal sliding mode control (NTSMC) is embedded within the ADRC. Within the ADRC framework, we optimize the tracking differentiator (TD) and the extended state observer (ESO) to enhance the system’s dynamic response performance and disturbance rejection capability. The main contributions of this work are summarized as follows.
- (1)
- Compared to the control methods for trajectory tracking of underactuated UUV presented in the existing references [17,18,19,20,21,22,23], this paper proposes a hybrid control strategy that integrates backstepping with an improved ADRC (IADRC). This strategy fully leverages the capability of backstepping to decompose the kinematic coupling of underactuated systems, effectively reducing the complexity of control design and ensuring high-precision trajectory tracking through the design of virtual velocity commands. Furthermore, by embedding nonsingular terminal sliding mode control (NTSMC) into the IADRC framework, the proposed strategy adaptively addresses external disturbances and system uncertainties, thereby enhancing system robustness. Additionally, through the optimization of control parameters and dynamic response mechanisms, this control strategy achieves fast and stable three-dimensional trajectory tracking in complex marine environments, providing an efficient and reliable solution for the control of underactuated UUVs.
- (2)
- Compared to the design of most disturbance observers in existing systems [28,29], this paper leverages the structural characteristics of underactuated UUVs to develop a model-assisted disturbance observer. The proposed disturbance observation scheme offers the following advantages in practical applications. First, the design incorporates the system model, pre-compensating predictable system dynamics to reduce the estimation burden on the ESO. Second, in cases where the specific form of uncertainty cannot be determined, the method estimates lumped disturbances by reducing the observer bandwidth and employing adaptive parameters, thereby enhancing the estimation accuracy of unknown environmental disturbances. This approach enables more effective disturbance observation and compensation, consequently improving the stability of the control system.
- (3)
- By designing a novel parameter adaptive tracking differentiator (PATD) and integrating it and NTSMC within the ADRC framework based on model-assisted ESO, an adaptive parameter tuning mechanism is introduced to dynamically optimize the gain parameters during the differentiation process, thereby effectively suppressing the differential explosion phenomenon and enhancing the smoothness and accuracy of signal tracking.
The remainder of this paper is organized as follows. Section 2 establishes the underactuated UUV model and derives the error equations pertaining to the trajectory tracking process. Section 3 focuses on the design of the trajectory tracking control system. Section 4 conducts a stability analysis of the proposed control system based on Lyapunov theory. Section 5 presents simulation results for the designed control system, including their verification and analysis. Section 6 provides concluding remarks, summarizing the work presented in the paper.
2. Underactuated UUV Model
The motion of a UUV is six-degree-of-freedom in three-dimensional space [30]. In this paper, the inertial system and the body-fixed system are established according to the symbols formulated by the Society of Naval Architects and Marine Engineers (SNAME), as shown in Figure 1. The origin of the inertial system is any position on the Earth. The origin of the body-fixed system coincides with the UUV floating center.
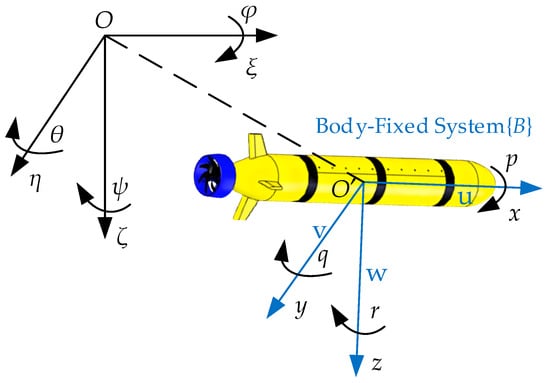
Figure 1.
The coordinate systems of UUV.
2.1. Kinematic Model
The following reasonable assumptions are introduced [30,31].
Assumption 1.
The UUV in this paper is buoyancy balanced, and the mass is evenly distributed. The shape is symmetrical about the three main planes, and the rolling channel has strong stability.
Assumption 2.
In the whole nominal trajectory,
.
Ignoring the rolling motion of the UUV, the five-degree-of-freedom kinematic equation is established as follows:
where are the three-direction position of the UUV, are the pitch angle and yaw angle of the UUV, are the three-direction linear velocity of the UUV in {B}, and are the pitch angle velocity and yaw angular velocity, respectively.
2.2. Dynamic Model
Based on Assumption 1 and the underactuated characteristics of the UUV in this paper, the following dynamic model is established [32].
where represents the mass term and represents the inertia term. , , , , , represent the hydrodynamic parameters of the linear resistance term, denotes the hydrodynamic parameter of the secondary drag term. is the thrust of the UUV, , represents the pitch rudder deflection angle and the yaw rudder deflection angle, respectively, and are rudder efficiency coefficients. represents the disturbance of the UUV.
The formulas for represent the translational dynamics equations of the UUV’s center of mass in the body-fixed coordinate system, while the formulas for represent the rotational dynamics equations about the center of mass in the body-fixed coordinate system. Subsequently, the actual state variables of the UUV will be calculated based on Equation (2), and the corresponding errors will be computed. Control laws will be designed for the UUV dynamic model described by Equation (2) to generate control outputs ensuring error convergence in the presence of disturbances and achieving tracking of the desired trajectory.
2.3. Error Model
In the trajectory tracking control task, the given desired trajectory is , the location information of the UUV is , and the position error in the inertial frame is as follows.
In the design of the UUV trajectory tracking control system, the position error in the inertial system {I} is usually converted to the body-fixed system {B}, and the trajectory tracking control task is completed by controlling the position error convergence. The position error in the body coordinate system is as follows.
According to the line of sight (LOS) navigation method, the desired attitude angle can be obtained as follows:
where is the expected yaw angle and is the expected pitch angle. The attitude angle error during navigation is
Combined with Equations (1) and (3)–(6), the position error and attitude error in the {B} system are derived as
where , , . After the non-singular transformation of the transformation matrix, and converge uniformly, so the control objective is transformed into , asymptotically stable and convergent. The following will introduce the design of the controller.
3. Improved ADRC Control System Design
This section designs a trajectory tracking control system for the underactuated UUV based on the previously established mathematical model. The system architecture is illustrated in Figure 2. Initially, a virtual velocity command is constructed using the backstepping method to decouple the complex kinematic coupling of the underactuated UUV, ensuring the precision and stability of trajectory tracking. Subsequently, within the ADRC framework, a PATD is developed to address the potential differential explosion issue arising from the virtual velocity command. This PATD effectively mitigates numerical instability during differentiation through adaptive parameter adjustment. Additionally, a model-assisted ESO is designed, leveraging the dynamic model information of the underactuated UUV to enhance the observation and compensation of external disturbances and internal uncertainties, thereby improving the control system’s stability and disturbance rejection performance. Finally, the NTSMC is integrated into the enhanced ADRC framework and combined with the backstepping method to formulate a composite control strategy for trajectory tracking of the underactuated UUV.
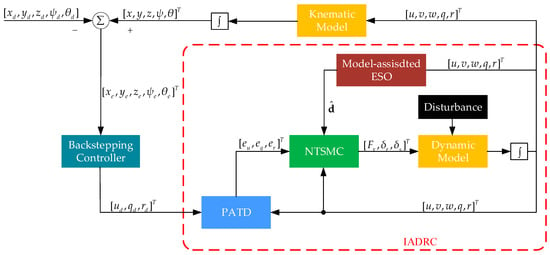
Figure 2.
The structure of control system.
3.1. Kinematic Controller Design Based on Backstepping Method
This section aims to design a kinematics controller based on the backstepping method, leveraging its capability to decompose the kinematic coupling characteristics of underactuated systems. The specific design process is as follows:
Step1 Construct Lyapunov function. Select the Lyapunov function as the following Equation (8).
where Deriving and bringing Equation (7) into Equation (8), the result is shown in Equation (9).
Step2 Virtual velocity command design. According to the Lyapunov theorem, design the desired virtual velocity command to ensure , guaranteeing the convergence of . The design of the virtual velocity command is shown in Equation (10).
In the course of navigation, the actual speed is , , , and the virtual control speed error is shown in Equation (11).
Step3 Conduct a stability analysis for the kinematics controller designed above. Take Equations (10) and (11) back to Equation (9), and the results are shown in Equation (12).
According to the Lyapunov theorem, in order to ensure that , , , converge to 0, the control law should subsequently be designed to achieve convergence of , , , thus ensuring the convergence of global errors.
3.2. Dynamic Controller Design Based on IADRC
As shown in Figure 2, the IADRC-based dynamic controller comprises three components: a parameter-adaptive tracking differentiator (PATD), a model-assisted ESO, and a non-singular terminal sliding mode control (NTSMC) law. Each component is detailed in turn in the following sections.
3.2.1. Parameter-Adaptive Tracking Differentiator
During the solution process of the virtual velocity command, the issue of differential explosion may arise. To address this challenge, a tracking differentiator (TD) is employed to achieve smooth tracking and differential estimation of virtual velocity command , and . This generates smoothed signal and . Furthermore, an adaptive law is designed to enable parameter self-adaptation within the TD, thereby forming a PATD. This enhancement further mitigates irregularities in the control process.
For the channel, the control input is updated using the following formulation:
where the calculation of is as follows.
where is the tracking speed and is the filtering factor. To enable adaptive adjustment of parameters and within the TD, thereby enhancing its tracking accuracy, differential signal quality, and robustness in complex and uncertain environments, we define ; then, the adaptive laws of and are expressed as follows:
where is the initial tracking speed and is the initial filtering factor. and are the parameters in the adaptive law, which are normal numbers. Similarly, the PATD of the r channel and q channel can be derived.
3.2.2. Model-Assisted ESO
In practical navigation scenarios, UUVs are subject to external disturbances that compromise the performance of their control systems. To ensure system stability and control quality, a disturbance observer must be designed to estimate and compensate for these perturbations. Based on the UUV dynamic model (Equation (2)), this subsection elaborates the design of a model-assisted ESO.
Let ; the model-assisted ESO is shown in Equation (16).
where is the UUV state observation value, and is the disturbance estimation value. and are parameters in ESO, which are positive numbers. is the calculation step length. Similarly, the model-assisted ESO of the r channel and q channel can be derived.
3.2.3. Non-Singular Terminal Sliding Mode Control Law
To ensure finite-time convergence of the speed tracking error for an underactuated UUV, this section integrates the previously derived PATD and model-assisted ESO with a non-singular terminal sliding mode approach to formulate the dynamic control law.
Define the following variables:
where is the disturbance of the UUV; then, the u-channel dynamic model of the UUV can be simplified as
Define the following error equation:
According to Equations (18) and (19), can be expressed as Equation (20).
The sliding surface is designed as follows:
where and are the coefficients of the sliding surface, , >1. , is a minimal positive number.
The reaching law is designed as follows:
where > 0, > 1. By assigning , Equation (23) is derived as follows.
Under observer estimation where, by setting , , , the control law for is derived as shown in Equation (24).
Similarly, the control laws for and are formulated as shown in Equation (25).
where , , , , , , .
This completes the design of the trajectory tracking control system for the UUV. The subsequent section will conduct a stability analysis of the proposed control system.
4. Stability Analysis
In this section, the stability analysis of the trajectory tracking control system is carried out. The following assumptions and theorems are given.
Assumption 3.
The dynamics of the UUV system are continuous and nonlinear. When
and
, the control input satisfies
Theorem 1.
Consider a nonlinear system whose dynamic process is composed of Equations (10), (13), (16), (25) and (26). If there is a positive definite Lyapunov candidate function:
Its derivative satisfies
where are bounded, and these parameters are all adjustable. Specifically, represents the lower bound of the control gain for position, velocity, and attitude errors. denotes the modulation of the control gain by the attitude angle, which is subject to geometric constraints of the attitude angle. indicates the convergence rate of the disturbance estimation. reflects the dynamic response characteristics, constrained by physical parameters. integrates the sliding mode control gain and nonlinear terms, embodying the characteristics of sliding mode control. represent state error, velocity error, PATD error, ESO error, and sliding surface, respectively, is a bounded positive term caused by perturbation estimation. Under these conditions, the system achieves global asymptotic stability in the presence of bounded disturbances, with all tracking errors converging to a small neighborhood of the origin.
The specific proof is as follows.
First, the error variables are defined as follows for the subsequent stability analysis:
The following Lyapunov function candidate is constructed for stability analysis.
Here, the explicit formulations of each term in the Lyapunov function are defined as follows.
Subsequently, the time derivative of is derived as follows.
For , can be approximated via the backstepping method as , and from and , it follows that
Similarly, the attitude error can be obtained, which is expressed as
In the methodology design of this study, since the backstepping technique utilizes to control and to control and , ultimately enabling the regulation of and , the convergence of and is dependent upon and . Hence, the terms and are not considered.
From comprehensive Equations (31)–(34), the following can be obtained.
According to Young’s inequality, the following can be obtained.
Therefore, the following can be obtained.
For , the equation of PATD in the channel of is as follows.
The equation of error is as follows.
When , then . The expression of is as follows.
According to Young’s inequality, the following can be obtained.
Therefore, the expression of in the channel of is as follows.
Similarly, according to Equations (38)–(42), and can be obtained. In summary, the following can be obtained.
For , the error of ESO in the channel of is as follows.
Bring Equations (31) and (44) into , the following can be obtained.
According to Young’s inequality, the following can be obtained.
Bringing Equation (46) into , the following can be obtained.
Similarly, according to Equations (44)–(46), and can be obtained. In summary, the expression of is as follows.
For , in the channel of , sliding surface and its derivative are as follows.
Then, can be expressed as follows.
Since , it holds that , from which the following is derived.
Similarly, according to Equations (49)–(51), and can be obtained. In summary, the expression of is as follows.
In summary, after substituting all items of , the expression of can be obtained.
According to Young’s inequality, the following can be obtained.
After sorting, the following expression is obtained.
To optimize Equation (55), the following parameters are defined.
Since are all bounded, the defined terms are bounded. Hence, the expression of is as follows.
Given that is determined by bounded disturbances and estimation errors, the system states remain bounded. All tracking errors asymptotically converge to a small neighborhood of the origin by Barbalat lemma. Thus, the theorem holds, and the system is stable.
5. Simulation and Analysis
This section validates the performance of the controller designed in this study through numerical simulation and comparative analysis. We utilized a system equipped with an i5 quad-core 1.4 GHz processor and 8 GB of RAM, performing numerical simulations on the MATLAB R2024a platform to verify the effectiveness of the proposed control algorithm.
5.1. Trajectory-Tracking Simulation
To validate the effectiveness of the proposed method, we select the high-mobility trajectory and initial state as test criteria. The structural parameters of the UUV correspond to those reported in Reference [32]. The reference trajectory is shown in Equation (58).
where is time. The initial position of the UUV is , , . The initial attitude angle of the UUV is , . The initial velocity of the UUV is , , , , . The corresponding parameters are detailed in Table 1.

Table 1.
Corresponding parameters.
The disturbance setting of the UUV navigation process is shown in Equation (59).
The following simulation results are obtained. Figure 3 depicts the trajectory tracking results in three-dimensional space, while Figure 4 illustrates the time histories of the desired and actual trajectories. The simulation results demonstrate that, under the control of the proposed method, the UUV can achieve precise trajectory tracking in three-dimensional space despite the presence of model uncertainties and external bounded disturbances.
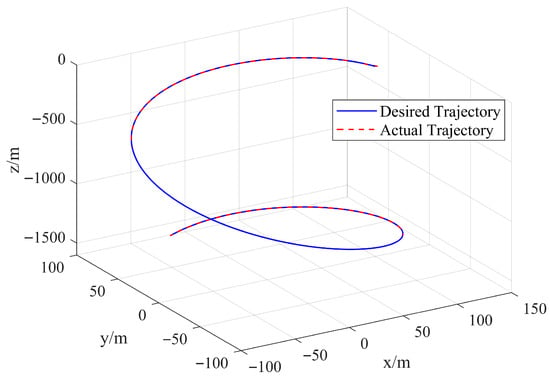
Figure 3.
Three-dimensional trajectory tracking results.
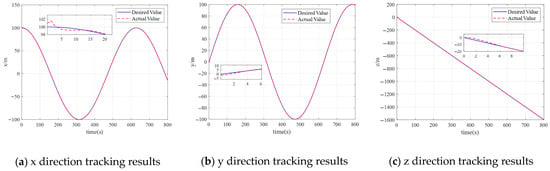
Figure 4.
Three-direction trajectory tracking results.
Figure 5, Figure 6, Figure 7 and Figure 8 depict the time histories of the control inputs, disturbance estimation, position errors and attitude errors, respectively. Figure 7 illustrates the time histories of the control inputs. Analysis reveals that during trajectory tracking, the output pitch control input exhibits oscillations with an amplitude of approximately 30° within the first 35 s; however, it promptly stabilizes within the subsequent 5 s. Similarly, the output yaw control input demonstrates oscillatory behavior during the initial 18 s of tracking, but also achieves rapid stabilization thereafter. Figure 6 demonstrates the ability of the model-assisted ESO integrated within the proposed controller to estimate external bounded disturbances. Across all three channels, the ESO achieves high estimation accuracy, with estimation error bounds confined within 0.02. Figure 7 depicts the time histories of the UUV’s position tracking errors in each Cartesian coordinate. In the x-direction, the initial position error is approximately 1.5 m. This error converges to within the range [−0.005, 0.05] within 6 s, exhibiting no overshoot; it remains confined to this numerical range thereafter. Similarly, in the y-direction, the initial position error is approximately 0.2 m. Convergence to the interval [−0.02, 0.06] occurs within 5 s without overshoot, and the error remains bounded within this range subsequently. Likewise, for the z-direction, the initial position error is approximately 2 m. It converges to within [0, 0.005] within 7 s, exhibiting no overshoot, and remains confined to this range throughout the simulation. Figure 8 depicts the time histories of attitude tracking errors during the maneuver. Although the pitch angle error and yaw angle error exhibit the chattering phenomenon during the initial phase, both converge to minimal ranges during subsequent control execution.
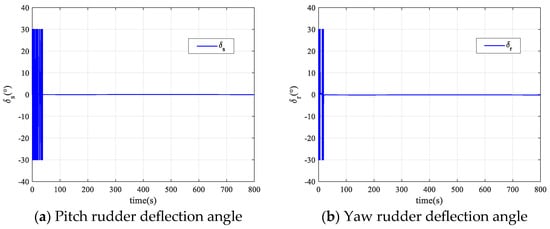
Figure 5.
Control quantity output.
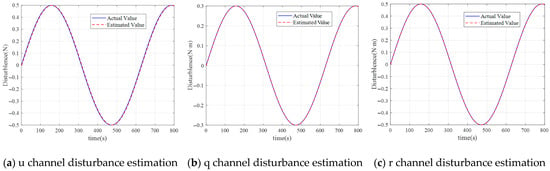
Figure 6.
Disturbance estimation results.
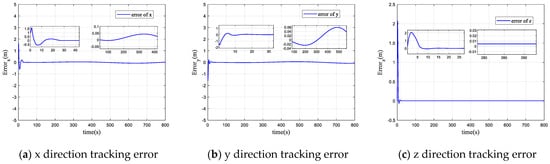
Figure 7.
Three-direction trajectory tracking error.
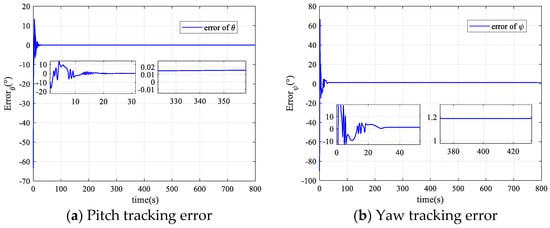
Figure 8.
Attitude angle tracking error.
In summary, the simulation results verify that the proposed controller achieves accurate three-dimensional trajectory tracking for the UUV despite the presence of disturbances. The developed controller attains rapid, overshoot-free convergence to the target trajectory across varying initial error magnitudes while confining the tracking errors within small bounded neighborhoods. Furthermore, the model-assisted ESO employed in the controller demonstrates high-fidelity estimation of external bounded disturbances, which substantially augments the disturbance rejection capability of the overall control scheme. Due to the NTSMC introduced into the ADRC framework in this paper, minor control fluctuations occur during the initial control phase. These fluctuations are caused jointly by NTSMC’s inherent control characteristics and the substantial initial deviation from the desired trajectory. However, benefiting from the overall controller architecture and powerful disturbance observer, the control signals rapidly stabilize near constant values. Subsequent control signals remain smooth without chattering phenomena.
5.2. Comparative Verification Simulation
This subsection employs a comparative study with the conventional NTSMC approach [33] to demonstrate the superiority of the proposed improved ADRC integrated with backstepping. The superior performance of the proposed method is verified by comparing the trajectory tracking errors of the two methods under the same working conditions; the parameters of the expected trajectory and external interference of the method in Reference [33] are the same as those in this paper. Three different working cases are set up for comparative simulation, and the initial conditions of the three working cases are set as shown in Table 2. The working principle of the comparative method is as follows: First, the backstepping method calculates the virtual control inputs and transmits them to the NTSMC dynamics controller. Subsequently, the NTSMC computes the control inputs based on the deviations between the actual state variables and the virtual control inputs , thereby enabling trajectory error convergence and ultimately achieving trajectory tracking. Specifically, the main difference between the NTSMC controller and our proposed controller is that the former does not incorporate the improved ADRC control strategy. The primary reason for introducing the NTSMC controller for comparison is to demonstrate the superiority of the IADRC control strategy designed in this paper. In NTSMC, the controller parameters are selected as and . For detailed information regarding the structure and parameter selection for the NTSMC controller, please refer to Reference [33].
Table 2.
The initial condition settings under three working cases.
The simulation results are as follows. Figure 9 shows the three-dimensional trajectory tracking results of the two control schemes under three working cases. Although the performance of the two control methods is different, the convergence values are the same under the three working conditions. According to Figure 10, Figure 11 and Figure 12 and Table 3, the initial errors of the proposed method in three directions are smaller than those of the method in the literature under three working conditions, and the convergence time and convergence performance are better than those of the method in the literature.
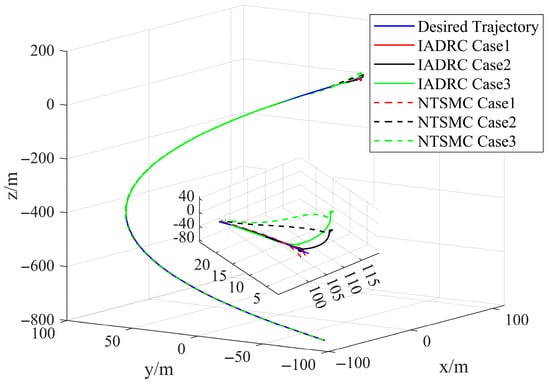
Figure 9.
Three-dimensional trajectory tracking comparison.
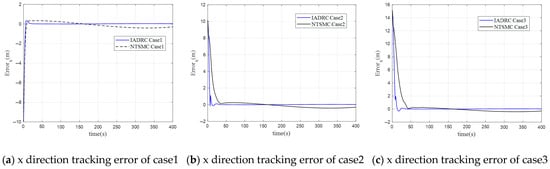
Figure 10.
x direction tracking error of three cases.
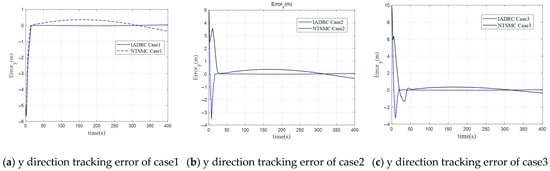
Figure 11.
y direction tracking error of three cases.
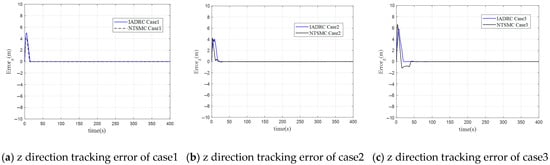
Figure 12.
z direction tracking error of three cases.
Table 3.
Three-direction position tracking steady-error under three working cases.
As illustrated in Figure 13 and Figure 14, under case 1, the proposed method achieves convergence of attitude errors within a small neighborhood of the steady-state value within 15 s. Although initial oscillations are observed in yaw angle errors under cases 2 and 3, the controller still accomplishes rapid active adjustment and subsequent convergence to the stabilized region within a limited time frame. In contrast, while the benchmark method also attains stabilization within 15 s, it exhibits significantly larger oscillations throughout the process. The same holds true for its performance under cases 2 and 3.
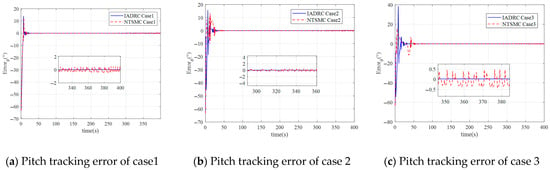
Figure 13.
Pitch tracking error of three cases.
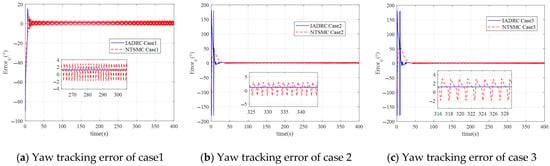
Figure 14.
Yaw tracking error of three cases.
As can be seen from the comparative analysis above, both control schemes successfully achieved trajectory tracking control with comparable precision. Nevertheless, distinct differences remain. In terms of positional error performance under varying operating conditions, the proposed method converges to a lower error range in all three directions, benefiting from its strong disturbance rejection capabilities and stable control structure. In contrast, the comparative method exhibits inferior error convergence, with its errors oscillating within a larger margin. Regarding attitude tracking performance, the proposed method rapidly stabilizes the attitude error within a small range without observable control chattering. While the comparative method also achieves convergence within a comparable time frame, it demonstrates significant chattering. In summary, under diverse operating conditions and in the presence of disturbances, the proposed method outperforms the comparative method by providing superior disturbance rejection, higher tracking accuracy, and more effective control ability.
6. Conclusions
To achieve three-dimensional diving trajectory tracking for underactuated UUVs under disturbances, this paper proposed a control method combining backstepping control with an IADRC. Within this method, virtual velocity control variables were derived using the backstepping technique. Subsequently, an NTSMC strategy was introduced into the ADRC framework to guarantee finite-time convergence. A TD with adaptively adjusted parameters was designed to resolve the issue of differential explosion, enabling smooth trajectory tracking. Furthermore, a model-assisted ESO was employed for efficient disturbance estimation. Lyapunov stability analysis demonstrated that the designed controller ensured the trajectory tracking errors converged to a small neighborhood near the origin within a finite time. Simulation of 3D trajectory tracking was then conducted on the proposed control scheme. Comparative analysis with the traditional NTSMC method validated the effectiveness and superiority of the proposed scheme. The simulation results revealed that although both methods could track the preset trajectory, the proposed method exhibited significantly superior performance in terms of error. Under three cases, the maximum convergence error range for the proposed method was [−0.02, 0.04], compared to [−0.4, 0.4] for the traditional NTSMC; the trajectory tracking error was reduced by 92.5%. Additionally, noticeable attitude chattering was observed in the traditional NTSMC approach.
The proposed method is suitable for high-precision UUV trajectory tracking tasks in complex marine environments and demonstrates promising application potential. However, this method exhibits a high dependency on model parameters, which may impact performance when model uncertainty is significant. Additionally, the algorithm has thus far been validated only through simulation, necessitating further verification through practical experiments. In the future, we aim to enhance the system’s adaptability to complex environments by incorporating online model update mechanisms or optimizing parameter tuning through deep learning. Furthermore, we will explore hardware integration to demonstrate the algorithm’s applicability, thereby providing support for broader applications in marine engineering.
Author Contributions
The author‘s contributions are as follows: Conceptualization, X.G., Z.Y. and C.M.; methodology, X.G., Z.Y. and C.M.; software, X.G. and Z.Y.; validation, X.G., Z.Y. and C.M.; formal analysis, X.G. and Z.Y.; investigation, X.G. and Z.Y.; resources, C.M.; data curation, X.G. and Z.Y.; writing—original draft preparation, X.G. and Z.Y.; writing—review and editing, C.M.; visualization, X.G. and Z.Y.; supervision, C.M.; project administration, C.M.; funding acquisition, C.M. All authors have read and agreed to the published version of the manuscript.
Funding
The authors would like to acknowledge the National Natural Science Foundation of China (Grant No. 52002185) and the Fundamental Research Funds for the Central Universities (Grant No. 30925010705) for providing funding for conducting experiments.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ADRC | Active Disturbance Rejection Control |
| IADRC | Improved Active Disturbance Rejection Control |
| SMC | Sliding Mode Control |
| NTSMC | Nonsingular Terminal Sliding Mode Control |
| ESO | Extended State Observer |
| CESO | Cascaded ESO |
| UUV | Unmanned Underwater Vehicle |
| 2D | Two-Dimensional |
| 3D | Three-Dimensional |
| TD | Tracking Differentiator |
| PATD | Parameter-Adaptive Tracking Differentiator |
| SNAME | Society Of Naval Architects And Marine Engineers |
References
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced Control in Marine Mechatronic Systems: A Survey. IEEE/ASME Trans. Mechatron. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Heo, J.; Kim, J.; Kwon, Y. Technology Development of Unmanned Underwater Vehicles (UUVs). J. Comput. Commun. 2017, 5, 28–35. [Google Scholar] [CrossRef]
- Huang, H.; Tang, Q.; Li, J.; Zhang, W.; Bao, X.; Zhu, H.; Wang, G. A review on underwater autonomous environmental perception and target grasp, the challenge of robotic organism capture. Ocean Eng. 2020, 195, 106644. [Google Scholar] [CrossRef]
- Li, J.; Guo, H.; Zhang, H.; Yan, Z. Double-Loop Structure Integral Sliding Mode Control for UUV Trajectory Tracking. IEEE Access 2019, 7, 101620–101632. [Google Scholar] [CrossRef]
- Ju, Y.; Cai, W.; Zhang, M.; Chen, H. A Trajectory Tracking Control Method for 6 Dof UUV Based on Event Triggering Mechanism. J. Mar. Sci. Eng. 2025, 13, 879. [Google Scholar] [CrossRef]
- Liao, Y.; Chen, C.; Du, T.; Sun, J.; Xin, Y.; Zhai, Z.; Wang, B.; Li, Y.; Pang, S. Research on disturbance rejection motion control method of USV for UUV recovery. J. Field Robot. 2023, 40, 574–594. [Google Scholar] [CrossRef]
- Yan, Z.; Liu, Y.; Yu, C.; Zhou, J. Leader-following coordination of multiple UUVs formation under two independent topologies and time-varying delays. J. Cent. South Univ. 2017, 24, 382–393. [Google Scholar] [CrossRef]
- Chen, H.; Chen, Y.; Wang, M. Trajectory tracking for underactuated surface vessels with time delays and unknown control directions. IET Control. Theory Appl. 2022, 16, 587–599. [Google Scholar] [CrossRef]
- Guo, B.; Chen, Y. Adaptive fast sliding mode fault tolerant control integrated with disturbance observer for spacecraft attitude stabilization system. ISA Trans. 2019, 94, 1–9. [Google Scholar] [CrossRef]
- Li, P.; Liu, D.; Baldi, S. Adaptive Integral Sliding Mode Control in the Presence of State-Dependent Uncertainty. IEEE/ASME Trans. Mechatron. 2022, 27, 3885–3895. [Google Scholar] [CrossRef]
- Cho, G.R.; Park, D.-G.; Kang, H.; Lee, M.-J.; Li, J.-H. Horizontal trajectory tracking of underactuated AUV using backstepping approach. IFAC-PapersOnLine 2019, 52, 174–179. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, P.; Qian, C.; Hua, C. Adaptive Trajectory Tracking Error Constraint Control of Unmanned Underwater Vehicle Based on a Fully Actuated System Approach. J. Syst. Sci. Complex. 2024, 37, 2633–2653. [Google Scholar] [CrossRef]
- Chen, G.; Dong, J. Approximate Optimal Adaptive Prescribed Performance Fault-Tolerant Control for Autonomous Underwater Vehicle Based on Self-Organizing Neural Networks. IEEE Trans. Veh. Technol. 2024, 73, 9776–9785. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Liu, S.-Y.; Wang, N. Fully-tuned fuzzy neural network based robust adaptive tracking control of unmanned underwater vehicle with thruster dynamics. Neurocomputing 2016, 196, 1–13. [Google Scholar] [CrossRef]
- Chen, H.; Tang, G.; Wang, S.; Guo, W.; Huang, H. Adaptive fixed-time backstepping control for three-dimensional trajectory tracking of underactuated autonomous underwater vehicles. Ocean Eng. 2023, 275, 114109. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Command filter based adaptive neural trajectory tracking control of an underactuated underwater vehicle in three-dimensional space. Ocean Eng. 2019, 180, 175–186. [Google Scholar] [CrossRef]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control. In Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Li, Y.; Wei, C.; Wu, Q.; Chen, P.; Jiang, Y.; Li, Y. Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle. Ocean Eng. 2015, 105, 270–274. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory tracking sliding mode control of underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-loop integral terminal sliding mode tracking control for UUVs with adaptive dynamic compensation of uncertainties and disturbances. IEEE J. Ocean Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Deng, Y.; Liu, T.; Zhao, D. Event-triggered output-feedback adaptive tracking control of autonomous underwater vehicles using reinforcement learning. Appl. Ocean Res. 2021, 113, 102676. [Google Scholar] [CrossRef]
- Gong, H.; Er, M.J.; Liu, Y. Fuzzy Optimal Fault-Tolerant Trajectory Tracking Control of Underactuated AUVs with Prescribed Performance in 3-D Space. IEEE Trans. Syst. Man Cybern. Syst. 2025, 55, 170–182. [Google Scholar] [CrossRef]
- Han, J. Active disturbance rejection controller and its application. Control Decis. 1998, 13, 19–23. (In Chinese) [Google Scholar]
- Ming, C.; Wang, X. A Novel Linear Active Disturbance Rejection Control Design for Air-Breathing Supersonic Vehicle Attitude System with Prescribed Performance. Int. J. Aerosp. Eng. 2020, 2020, 1676739. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Ji, W. Improved Non-Singular Fast Terminal Sliding Mode Control with Disturbance Observer for PMSM Drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Yan, Z.; Deng, S.; Yang, Z.; Zhao, X.; Yang, N.; Lu, Y. Improved nonlinear active disturbance rejection control for a continuous-wave pulse generator with cascaded extended state observer. Control. Eng. Pract. 2024, 146, 105897. [Google Scholar] [CrossRef]
- Wang, G.; Fang, S.; Xu, Q. Robot Joint Vibration Suppression Method Based on Improved ADRC. Appl. Sci. 2025, 15, 5476. [Google Scholar] [CrossRef]
- Liu, H.; Xu, Z.; Qi, Z.; Li, B.; Shu, Y. Research on ADRC algorithm for longitudinal attitude of hydrofoil craft based on improved convergence law. Ocean Eng. 2024, 293, 116656. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Wu, H.-M.; Karkoub, M. Hierarchical backstepping control for trajectory-tracking of autonomous underwater vehicles subject to uncertainties. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Republic of Korea, 22–25 October 2014; pp. 1191–1196. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Egeland, O. Time-varying exponential stabilization of the position and attitude of an underactuated autonomous underwater vehicle. IEEE Trans. Autom. Control 1999, 44, 112–115. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, H.; Hu, B.; Feng, X. Trajectory Tracking of a Novel Underactuated AUV via Nonsingular Integral Terminal Sliding Mode Control. IEEE Access 2021, 9, 103407–103418. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).