This section will provide the important definitions that linked relevant theorems used in this work.
3.1. RKTF Trees and B-Series Theory
To construct the order conditions to RKTF approach Equation (
2), we are required to use autonomous formula of fourth-order IVP Equation (
1)
subject to initial prerequisites of
The IVP (
1) of order four can be defined as the autonomous form through expansion of initial-value problem (
1) using one-dimensioned vector
We will obtain the same result when the RKTF approach (
2) is applied to the autonomous Equation (
4) and also to the non-autonomous problem (
1). Thus, we want only consider the autonomous Equation (
3) (see Hussain et al. [
25]). Hence, to get a common method to obtain the higher-order derivatives to the analytic solutions for Equation (
3), we note that the elementary differentials up to six derivatives for
at
are given as follow:
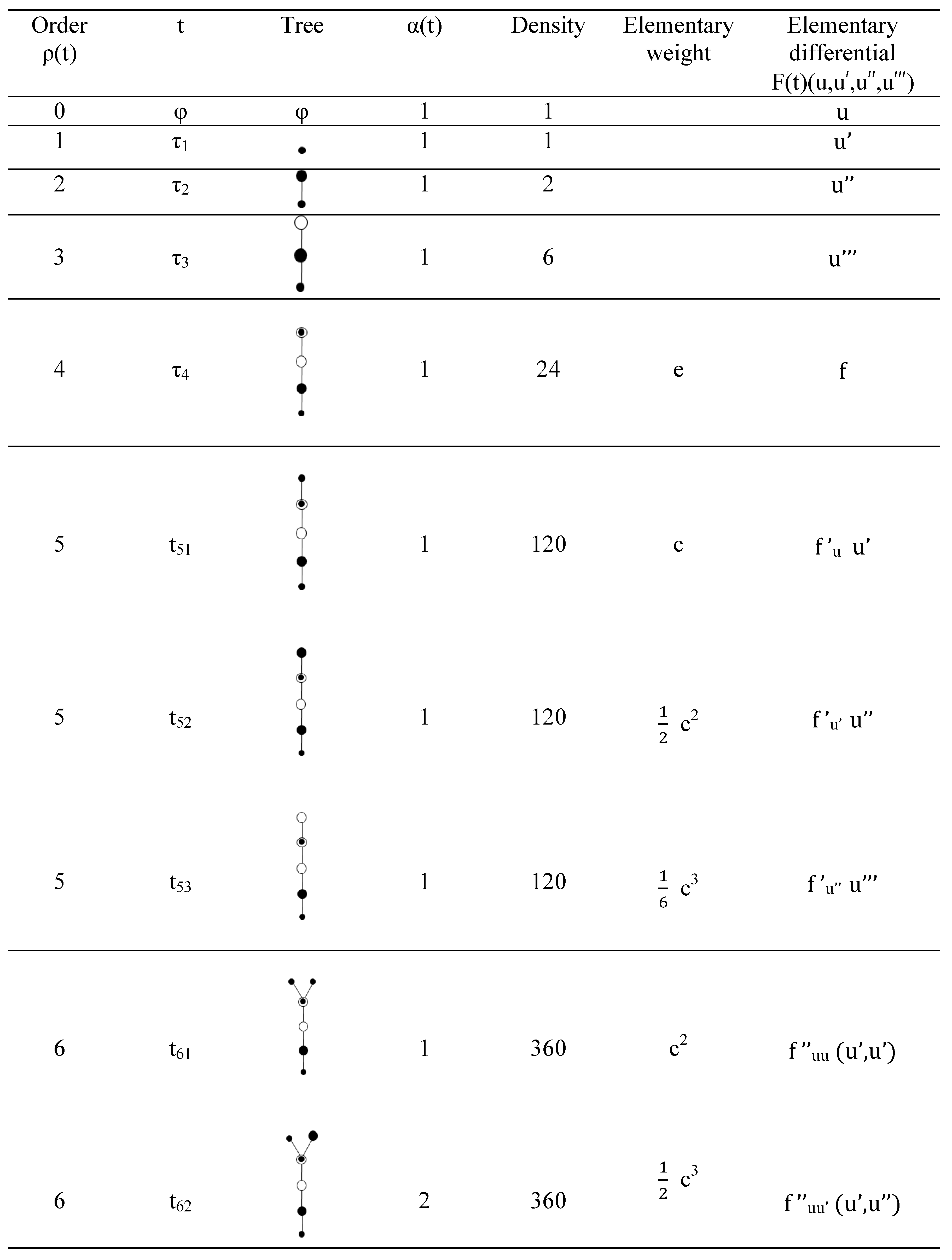
Based on Hairer et al. ([
9], p. 286) a better method to tackle this issue is to use graphical exemplification indicated by quad-colored trees, in addition to some amendments to the ODEs of order four. These trees contain four kinds of; “meagre”, “black ball”, “white bal l”, as well as “black ball inside white ball” vertices both with brackets to link them. Fairly, in these trees we use the finish “meagre vertex” to denote for all
, the finish “black-ball vertices” to denote for all
, the finish “white ball vertex” to denote for all
and the finish “black-ball-within-white-ball vertex” to denote for all
f, and all arc leaves of this vertex is the m-ordered f-derivative based on
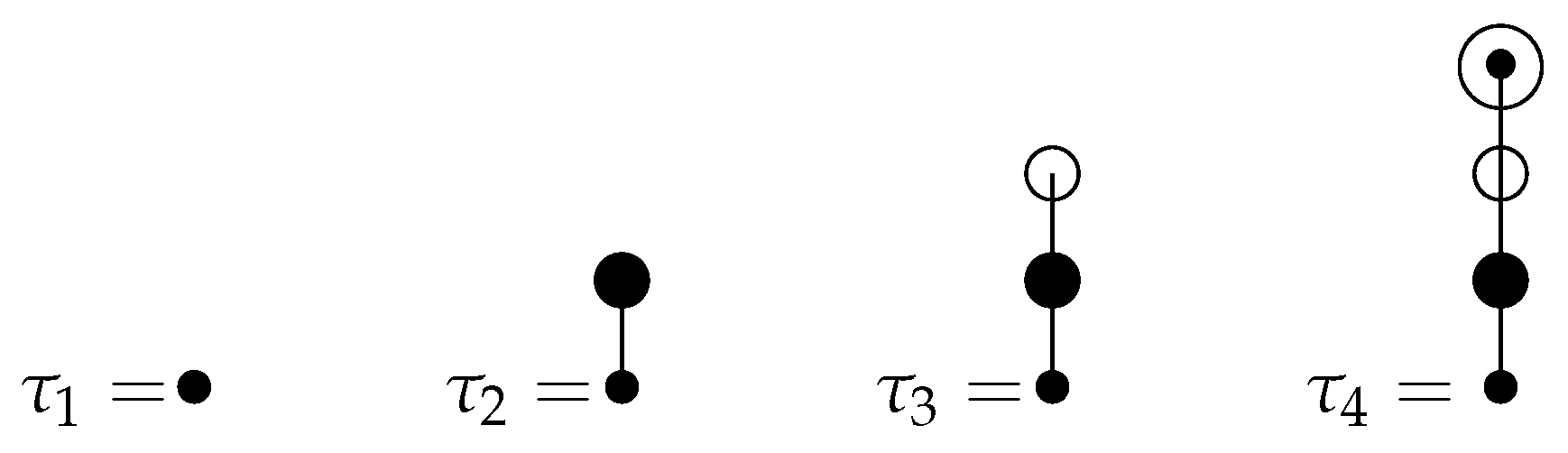
. The sign
is denoted to the first algebraic order tree, the sign
is denoted to the second algebraic order tree, the sign
is denoted to a algebraic order three tree, while
is denoted to the fourth algebraic order tree (see
Figure 1).
Definition 2. The repetitively explaining for the group of quad-colored trees (RT) that gives the following: (see Hussain et al. [25] and Chen et al. [26]) - (a)
The tree includes just one “meagre vertex” (called root) and and also trees mentioned above and are in .
- (b)
If , , then is the tree gained through connecting , , to “black ball inside white ball vertex” of the tree in and the root of the “meagre vertex” is at the bottom. The subscript 4 is to remind that the trees of the roots of , , to the tree include a series of four vertex.
To produce the quad-colored trees we shall use these basics:
- (a)
The “meagre” vertex is permanently the root.
- (b)
A “meagre” vertex has just one kid and this kid have to be “black ball”.
- (c)
A “black-ball” vertex has just one kid and this kid have to be “white ball”.
- (d)
A “white ball” vertex has just one kid and this kid have to be “black ball inside white ball vertex”.
- (e)
Each kid of a “black ball inside white ball vertex” vertex has to be “meagre”.
Definition 3. We acquaint the order and similarity functions as follows: (see Hussain et al. [25]) - (a)
= 1, = 2, = 3, = 4,
- (b)
= 1, = 1, = 1, = 1,
- (c)
If , then and where is the number of vertices of t, and count equal trees between
Then we can acquaint the set that contain all trees of order p, where is the multiplicity of for .
Definition 4. The vector-valued function on is defined as the elementary differential to every tree, recursively by (see Hussain et al. [25]) - (a)
,
- (b)
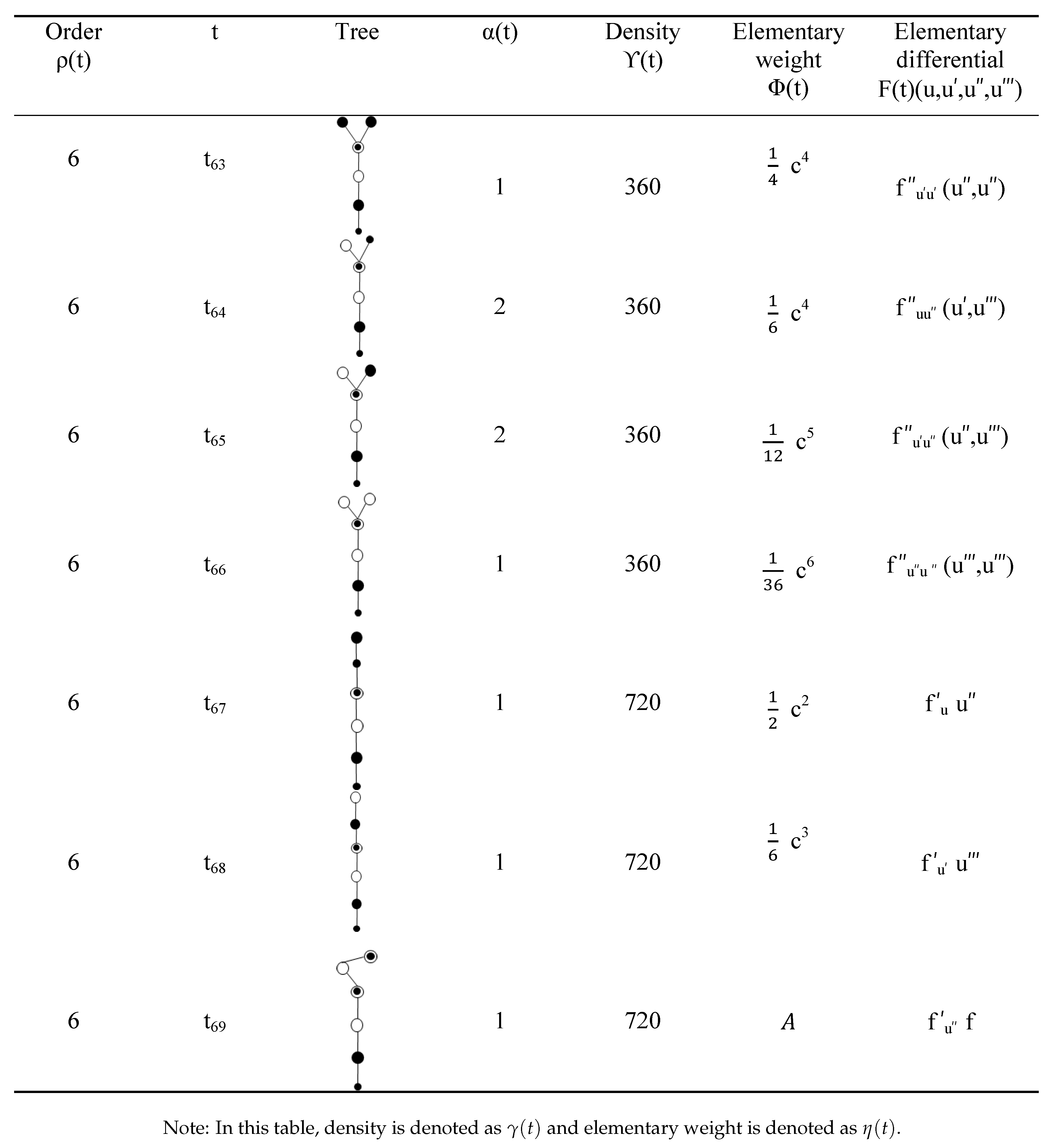
Note: we denote by
the quad-colored tree whose new roots are black ball, white ball and black ball inside white ball. (see
Table 2).
By the acquaint of B-series on the tri-colored trees in [
27] and the acquaint of B-series on the root trees in ([
28], p. 57), we expanded these theorems and definitions to RKTF formulas to grant the use qualifier of B-series on the group
from the quad-colored trees.
Definition 5. For a mapping we can define format of an official series through:is named a B-series. (see Chen et al. [26]). We will give the fundamental lemma that provides an important role in this construct as following.
Lemma 1. Suppose δ be a function with = 1, be a function with = 1 and also be a function with = 1. Thus, is also B-series where = 0, = 1 and for with
Proof. By assumption, , and . Thus, the Taylor expansion of shows that which implies that , = 1.
Depend on the proof in Hairer et al. [
28], we have
where, one equality
and the number of methods of ordering the subtrees
in
i.e., the multiplicity of
is
,
count equal trees between
,
count equal trees between
and
count equal trees between
we get
Theorem 1. Suppose that the analytic solution of the form (
3)
is B-series, with a real function e defined on . Thenand for , Proof. Thus, the first fourth derivative of
is presented by
Moreover, of Lemma 1, we have
where
and
,
Inserting (
9) and (
10) to Equation (
3), then depending on the both sides, we compare the coefficients of the same elementary differential to obtain
and
lastly, depending on the Taylor series expansions of
about
,
. □
, we lead to write the density as follows and also write non-negative integer as follows . Thus, from Theorem 1 we have two propositions that we will mention below.
Proposition 1. , the density is the non-negative integer valued function on satisfying. (see Hussain et al. [25] and Chen et al. [26]) - (i)
,
- (ii)
,
Proposition 2. , is the positive-integer satisfying. (see Chen et al. [26]) - (i)
,
- (ii)
, with distinct and distinct, distinct,where is the multiplicity of .
Then the B-series (
6) can be written as follows:
and
can be expressed as
3.3. B-Series of the Numerical Solution and Numerical Derivative
So as to constitute the B-series for the numerical solution
and the numerical derivative
of the form (
3) created by the RKTF approach (
2), we suppose that
,
and
in Equation (
2) can be developed as B-series
,
and
respectively. Then the first-three equations in the scheme (
2) are as follows,
by (
11) and (
12) the former two equations can be presented as
It follows that
and
furthermore, for trees
and
, Lemma 5 gives
inserting (
19) into (
20) we obtain:
We denote , for all trees and .
Thus, (
21) can be written as follows,
Commonly, the next significant lemma yields the values of for each tree belonging to
Lemma 2. We can compute the function on recursively.
- (i)
= 1
- (ii)
for with distinct and different from and distinct, distinct,
where, is the multiplicity of respectively and is the multiplicity of for
Here, we define the vector for
- (i)
The initial weight linked to is denoted by
- (ii)
is denoted to the initial weight linked with and written as follows:
- (iii)
is denoted to the initial weight linked with and written as follows:
.
- (iv)
is denoted to the initial weight linked with and written as follows:
.
Theorem 3. The numerical solution and the numerical derivative of Equation (
3)
produced by the RKTF approach (
2)
have the following B-series Proof. By assumption,
,
and
in the scheme (
2) are B-series
and
respectively, from Lemma 5 we have
3.5. Zero-Stability of the New Method
Here, we will discuss the zero-stability of the new techniques. It is stable at zero significance to prove the convergence of multi-step techniques and stability (see [
10,
11]). In [
29], also discussed on the zero-stability to obtain the upper boundedness of the multi-steps methods. Now, the first characteristic polynomial for the RKTF method for Equation (
2) is based on the following equation:
where
is the identity matrix coefficient of
and
and
is matrix coefficient of
,
and
, respectively.
Then, the first characteristic polynomial of new methods is
thus, By solving the characteristic polynomial, we obtain the roots, = 1, 1, 1, 1. Therefore, the RKTF methods is zero stable since the roots of the characteristic polynomial have modulus less than or equal to one. The RKTF is consistent because the RKTF has order This property, with the zero stable of the methods, implies the convergence of the RKT method.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}