Barycenter Theorem in Phase Characteristics of Symmetric and Asymmetric Windows


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Phase Response of Symmetric Windows
2.1. Phase Response of Symmetric Windows
2.2. Phase Response of Sampled Symmetric Windows
3. Phase Response of Asymmetric Windows
3.1. Phase Response of Asymmetric Windows
3.2. Phase Response of Sampled Asymmetric Windows
4. Applications and Numerical Simulations
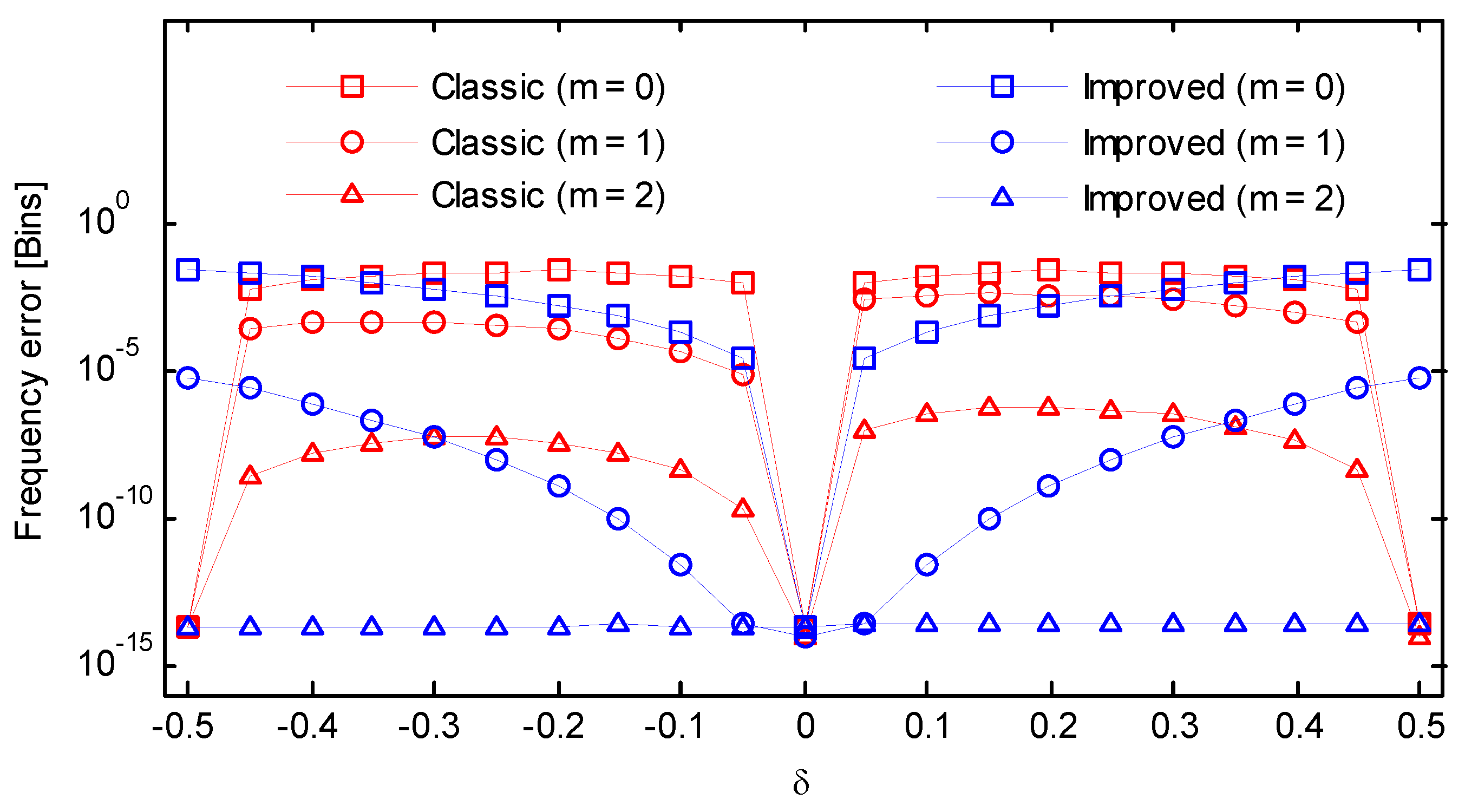
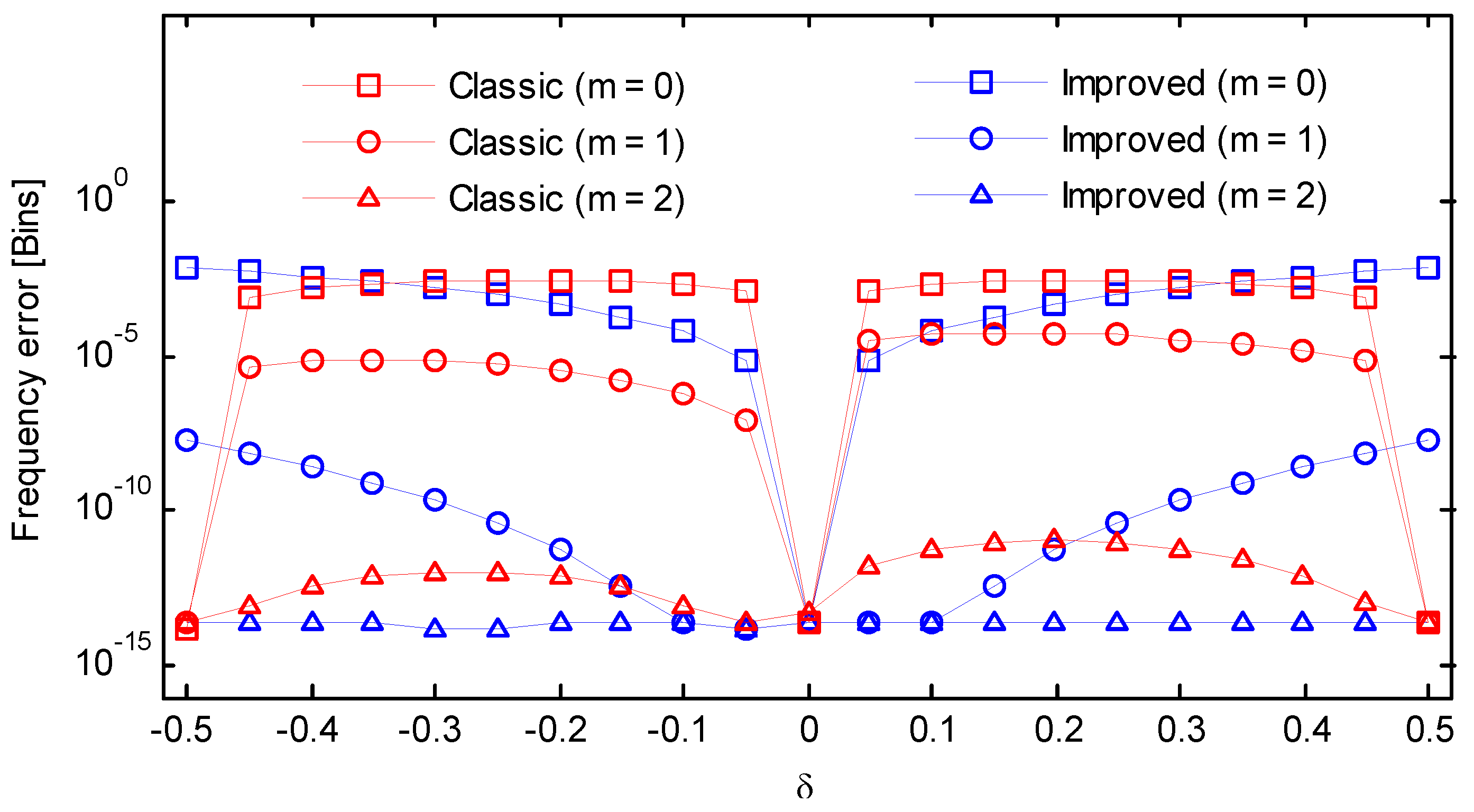
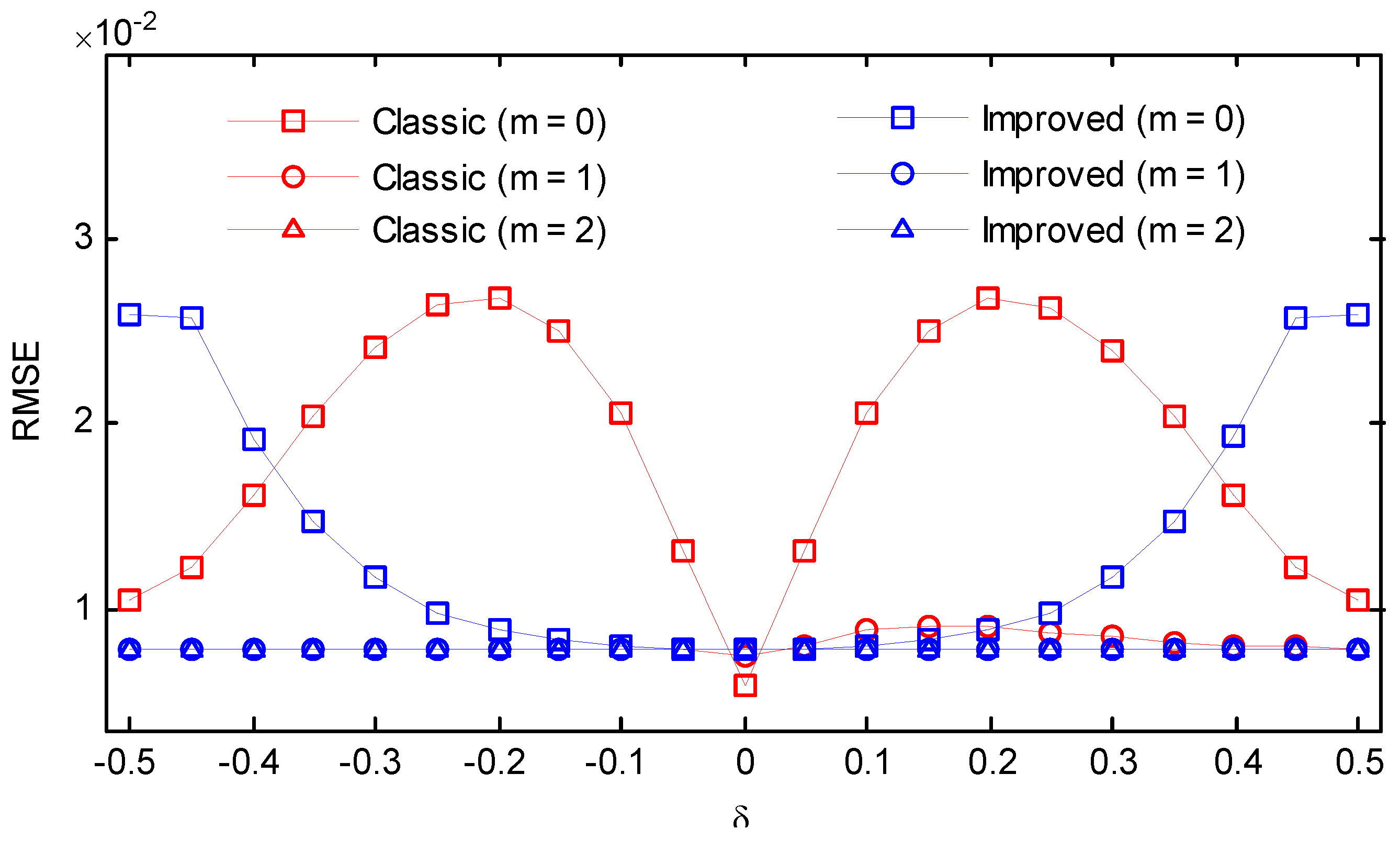
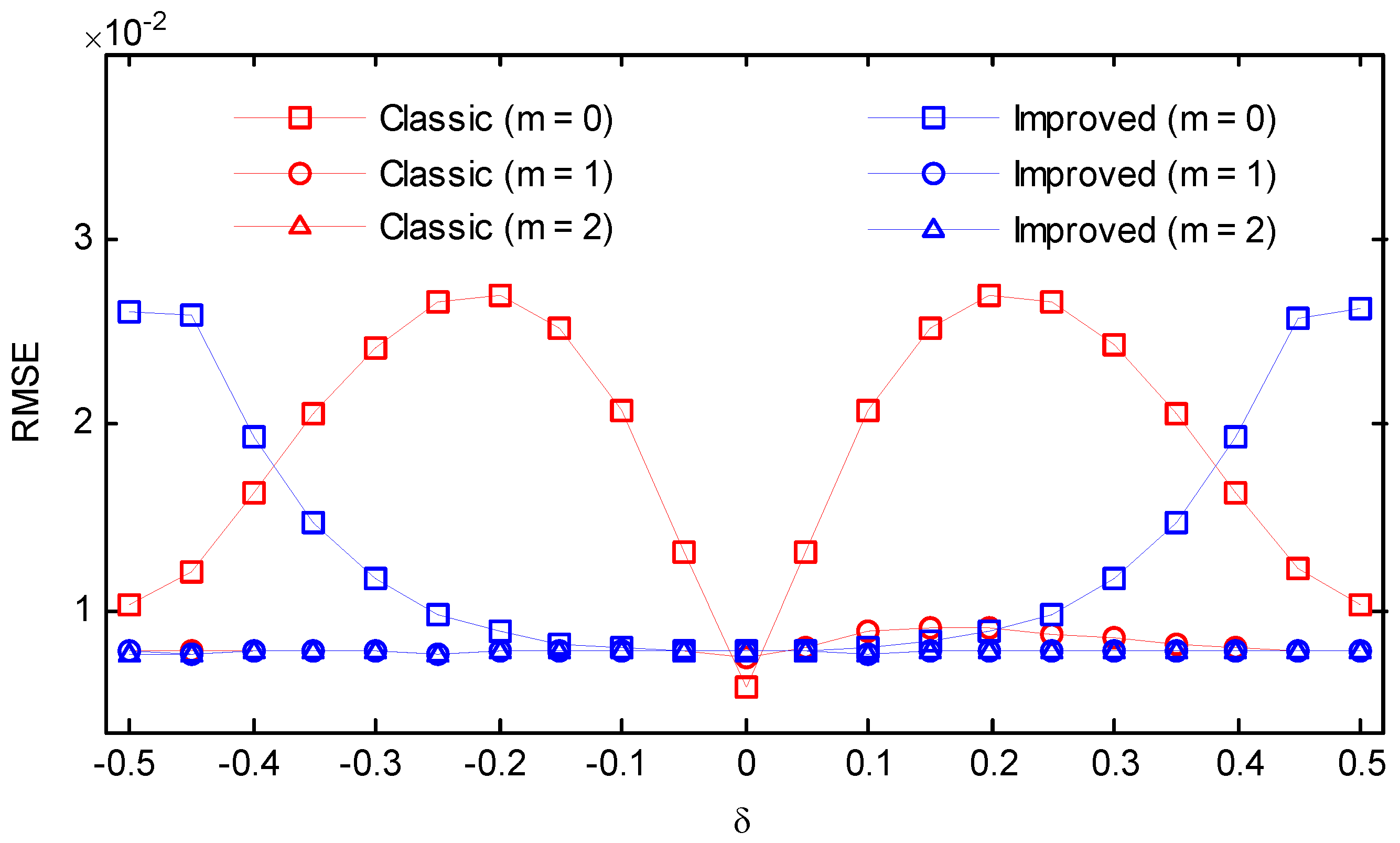
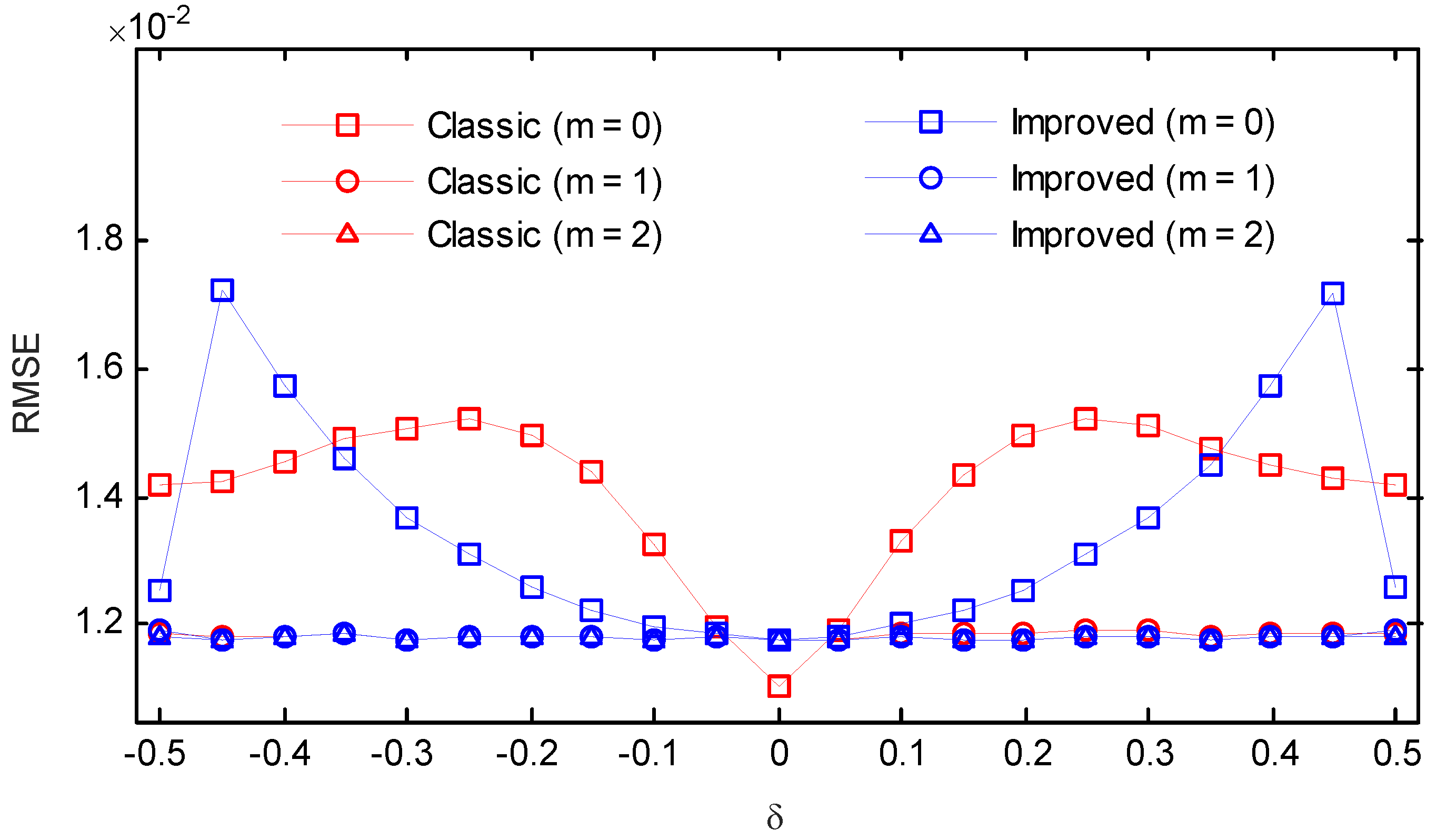
4.1. Application in Frequency Estimation
- (1)
- Obtain the first discrete-time signal , where is the raw sequence with N samples and is a symmetric window.
- (2)
- Obtain the second sequence , where is the corresponding asymmetric window.
- (3)
- Perform a coarse search on , where is FFT of , to determine the bin number l with the largest magnitude.
- (4)
- Calculate the window-related coefficient as well as the phase difference between the two sequences , where is the DFT coefficient of .
- (5)
- Return the coarse estimate .
- (6)
- Obtain the further refined estimate by the iterations .
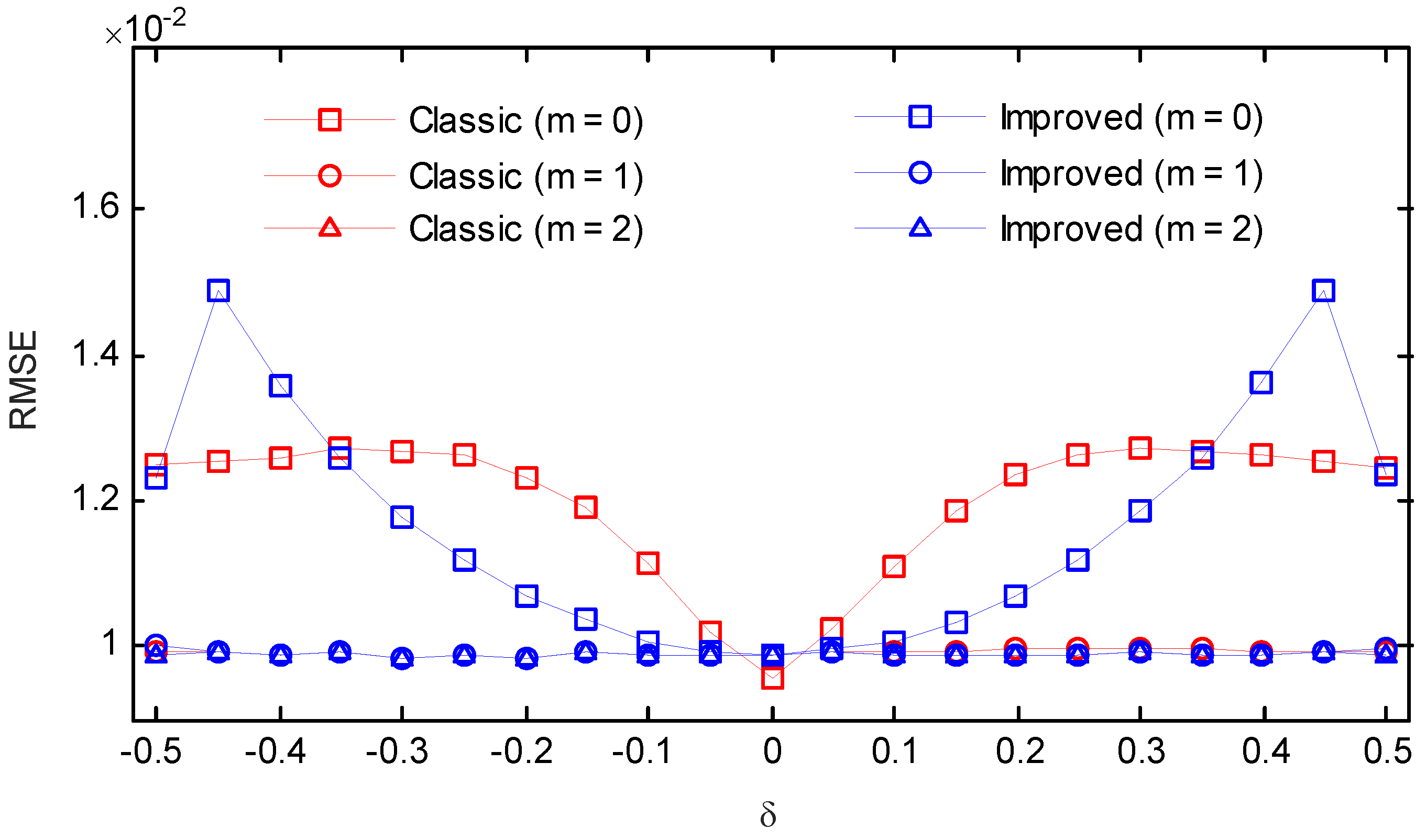
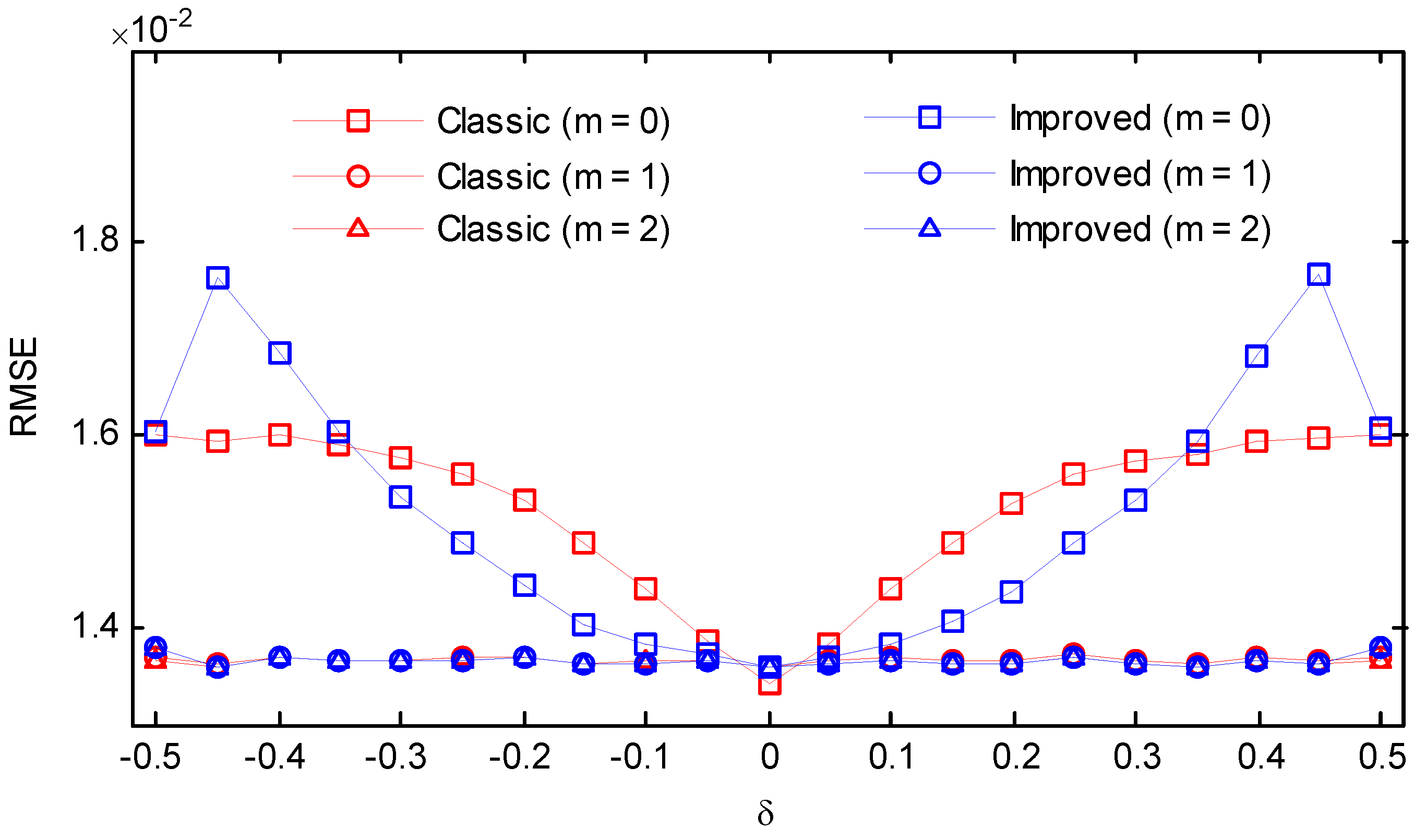
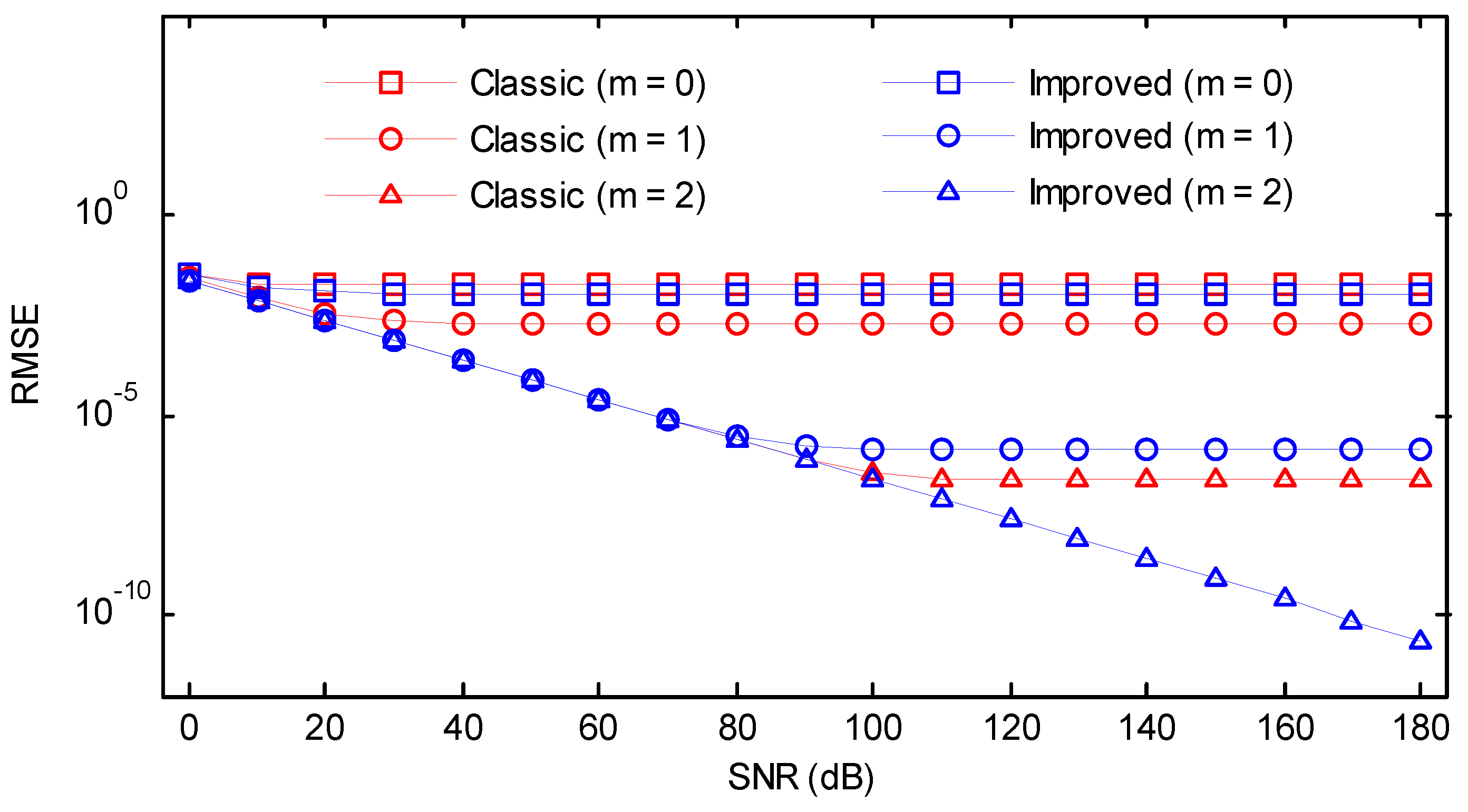
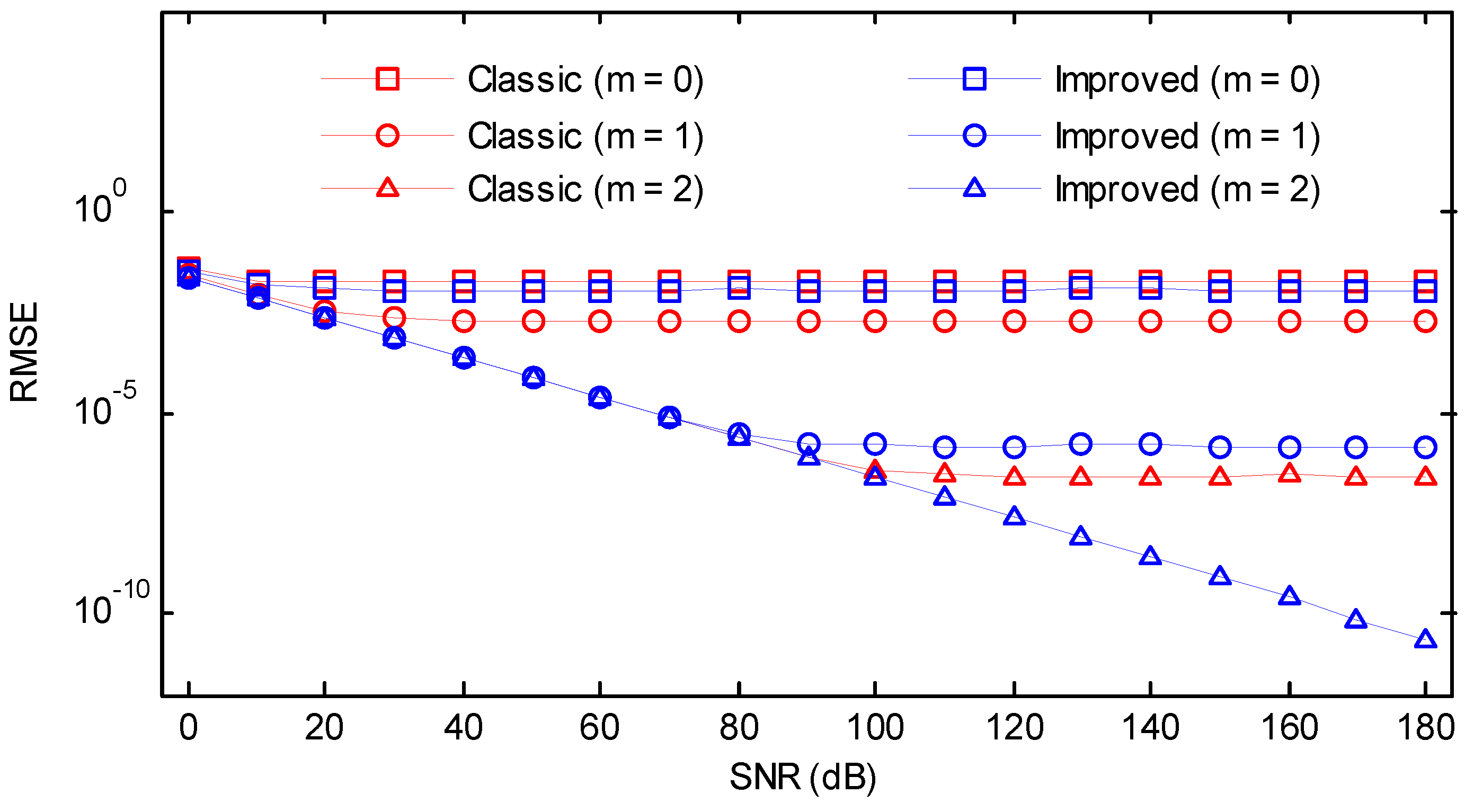
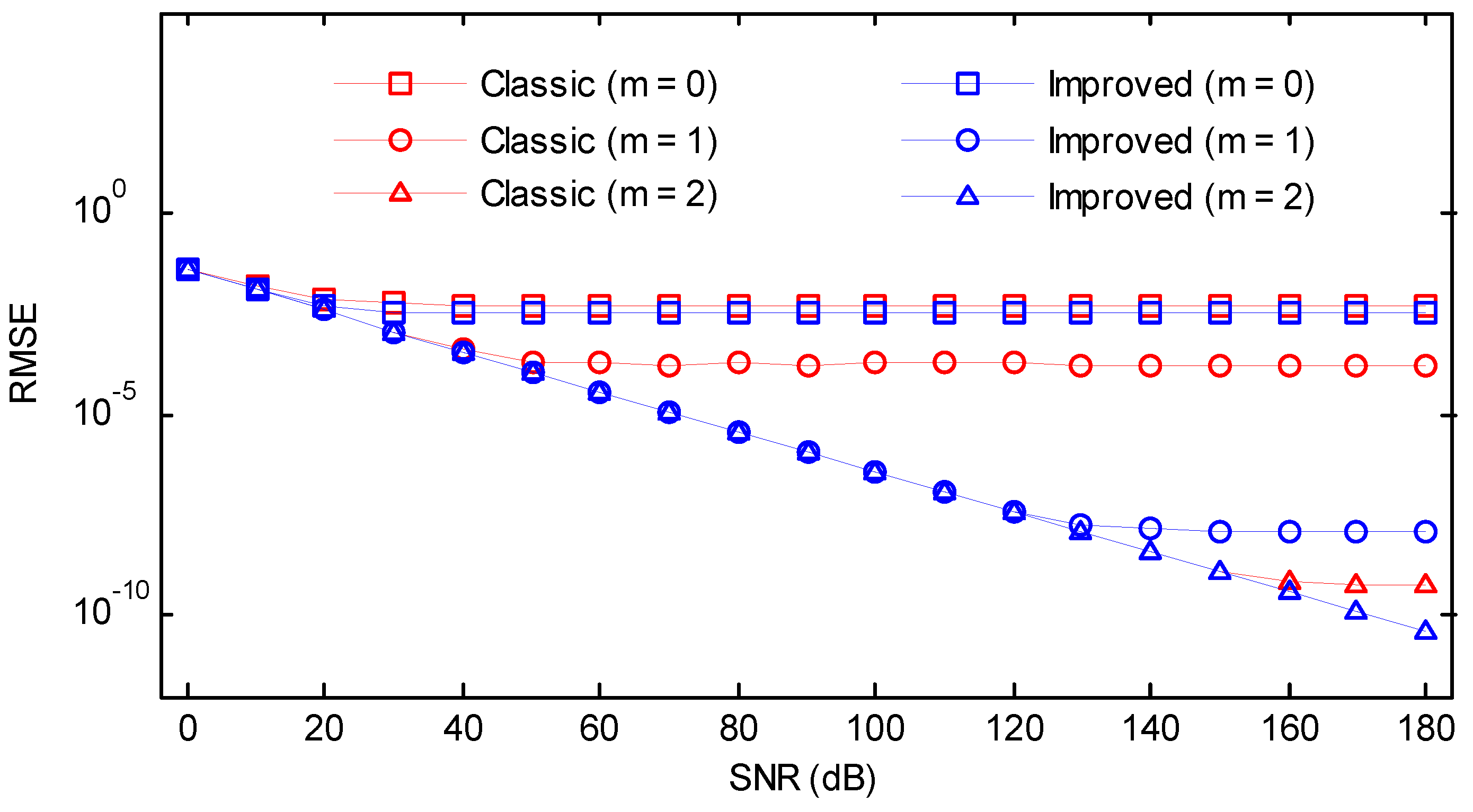
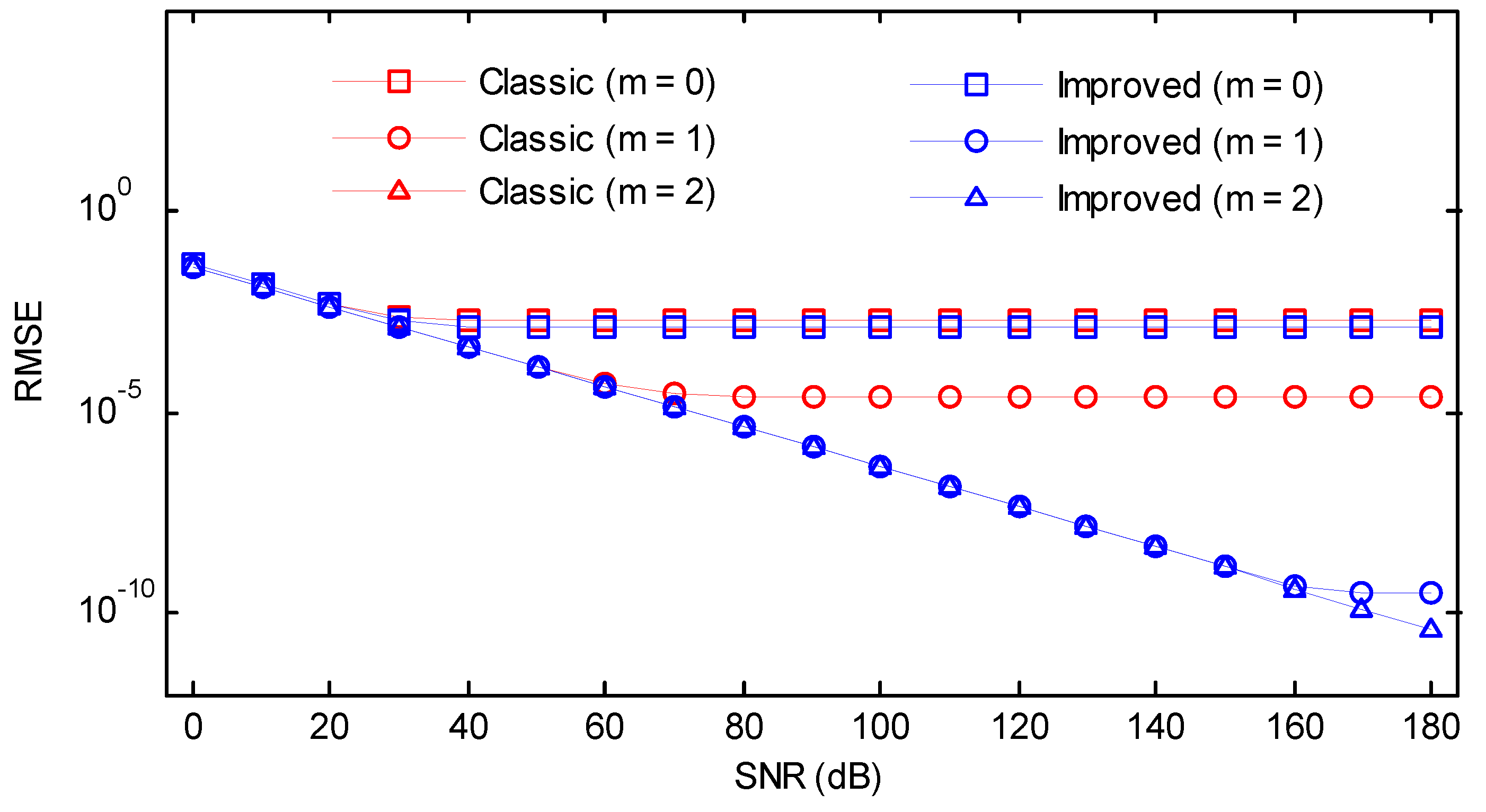
4.2. Simulation and Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
References
- Harris, F.J. On the use of harmonic analysis with the discrete Fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Luo, J.; Xie, Z.; Li, X. Asymmetric windows and their application in frequency estimation. J. Algorithms Comput. Technol. 2015, 9, 389–412. [Google Scholar] [CrossRef]
- Rozman, R.; Kodek, D.M. Using asymmetric windows in automatic speech recognition. Speech Commun. 2007, 49, 268–276. [Google Scholar] [CrossRef]
- Florencio, D.A.F. On the use of asymmetric windows for reducing the time delay in real-time spectral analysis. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Toronto, AN, Canada, 14–17 April 1991; Volume 3265, pp. 3261–3264. [Google Scholar]
- Florencio, D.A.F. Investigating the use of asymmetric windows in CELP vocoders. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Minneapolis, MN, USA, 27–30 April 1993; pp. 427–430. [Google Scholar]
- Rozman, R.; Kodek, D.M. Improving speech recognition robustness using non-standard windows. In Proceedings of the IEEE Region 8 Eurocon 2003: Computer as a Tool, Ljubljana, Slovenia, 22–24 September 2003; Volume 172, pp. 171–174. [Google Scholar]
- Shannon, B.J.; Paliwal, K.K. Feature extraction from higher-lag autocorrelation coefficients for robust speech recognition. Speech Commun. 2006, 48, 1458–1485. [Google Scholar] [CrossRef]
- Zivanovic, M.; Carlosena, A. On asymmetric analysis windows for detection of closely spaced signal components. Mech. Syst. Signal Process. 2006, 20, 702–717. [Google Scholar] [CrossRef]
- Luo, J.; Xie, M. Phase difference methods based on asymmetric windows. Mech. Syst. Signal Process. 2015, 54–55, 52–67. [Google Scholar] [CrossRef]
- Rabiner, L.R.; Gold, B.; Yuen, C. Theory and Application of Digital Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1975. [Google Scholar]
- Huang, D. Phase error in fast fourier transform analysis. Mech. Syst. Signal Process. 1995, 9, 113–118. [Google Scholar]
- Xie, M.; Ding, K. Corrections for frequency, amplitude and phase in a fast fourier transform of a harmonic signal. Mech. Syst. Signal Process. 1996, 10, 211–221. [Google Scholar]
- Luo, J.; Xie, Z.; Xie, M. Frequency estimation of the weighted real tones or resolved multiple tones by iterative interpolation DFT algorithm. Digit. Signal Process. 2015, 41, 118–129. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing Principles, Algorithms, and Applications, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]























© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, J.; Xu, H.; Zheng, K.; Li, X.; Feng, S. Barycenter Theorem in Phase Characteristics of Symmetric and Asymmetric Windows. Symmetry 2018, 10, 329. https://doi.org/10.3390/sym10080329
Luo J, Xu H, Zheng K, Li X, Feng S. Barycenter Theorem in Phase Characteristics of Symmetric and Asymmetric Windows. Symmetry. 2018; 10(8):329. https://doi.org/10.3390/sym10080329
Chicago/Turabian StyleLuo, Jiufei, Haitao Xu, Kai Zheng, Xinyi Li, and Song Feng. 2018. "Barycenter Theorem in Phase Characteristics of Symmetric and Asymmetric Windows" Symmetry 10, no. 8: 329. https://doi.org/10.3390/sym10080329
APA StyleLuo, J., Xu, H., Zheng, K., Li, X., & Feng, S. (2018). Barycenter Theorem in Phase Characteristics of Symmetric and Asymmetric Windows. Symmetry, 10(8), 329. https://doi.org/10.3390/sym10080329