
A Weighted-Least-Squares Meshless Model for Non-Hydrostatic Shallow Water Waves






Abstract
:1. Introduction
2. The Governing Equations and the Simplification
3. The Time Marching Processes
3.1. Prediction
3.2. Correction
4. Approach for Calculating the Spatial Derivatives
5. The Smoothing Process
6. Examples
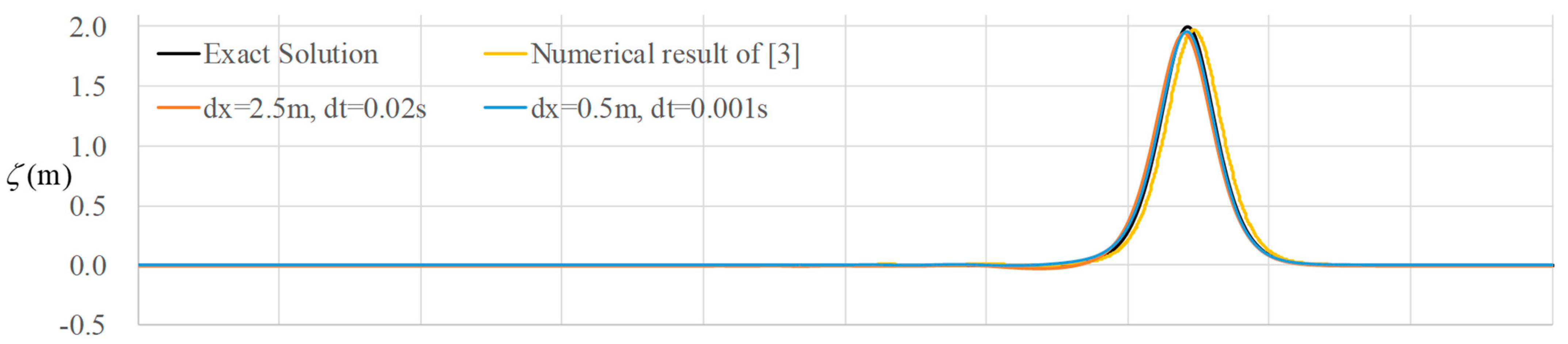
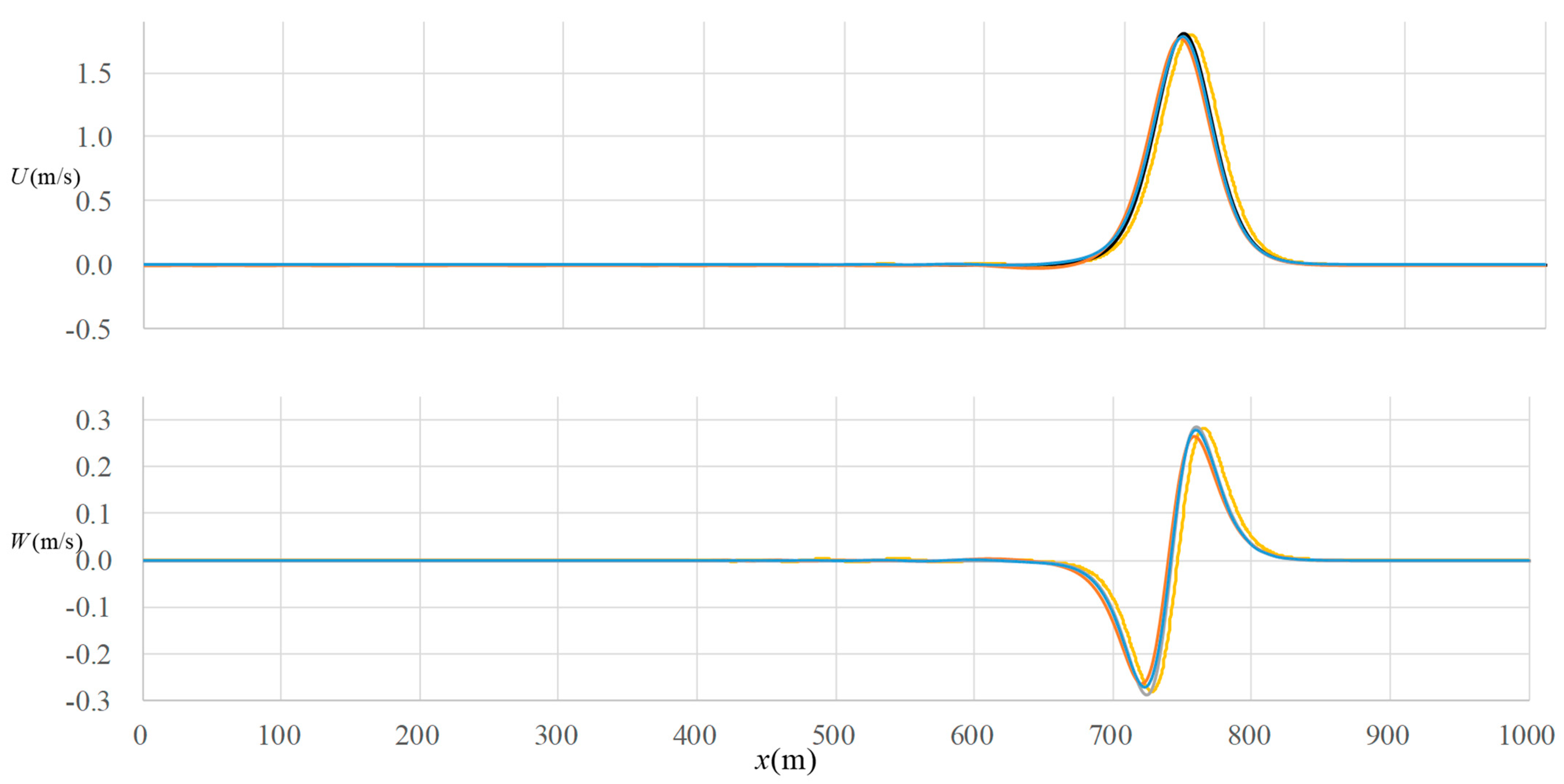
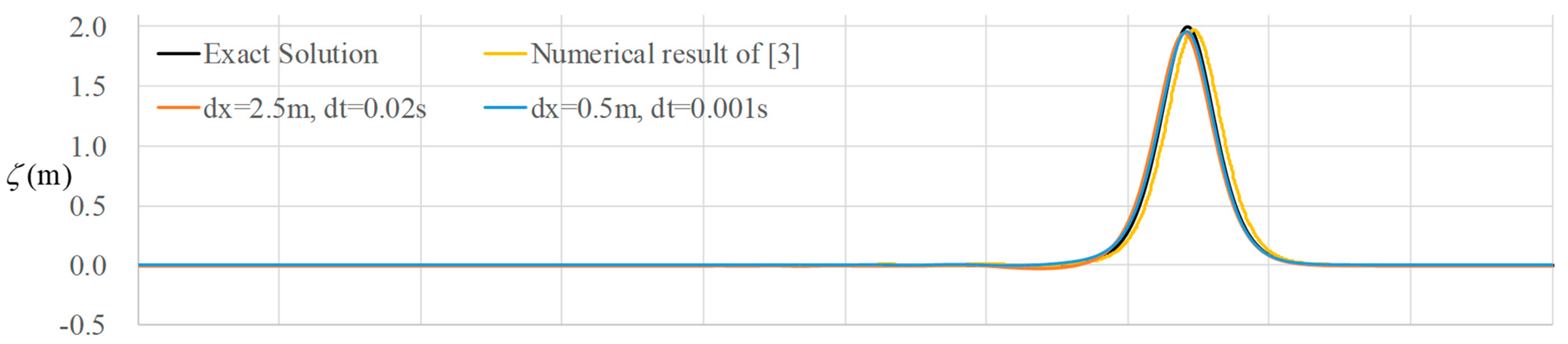
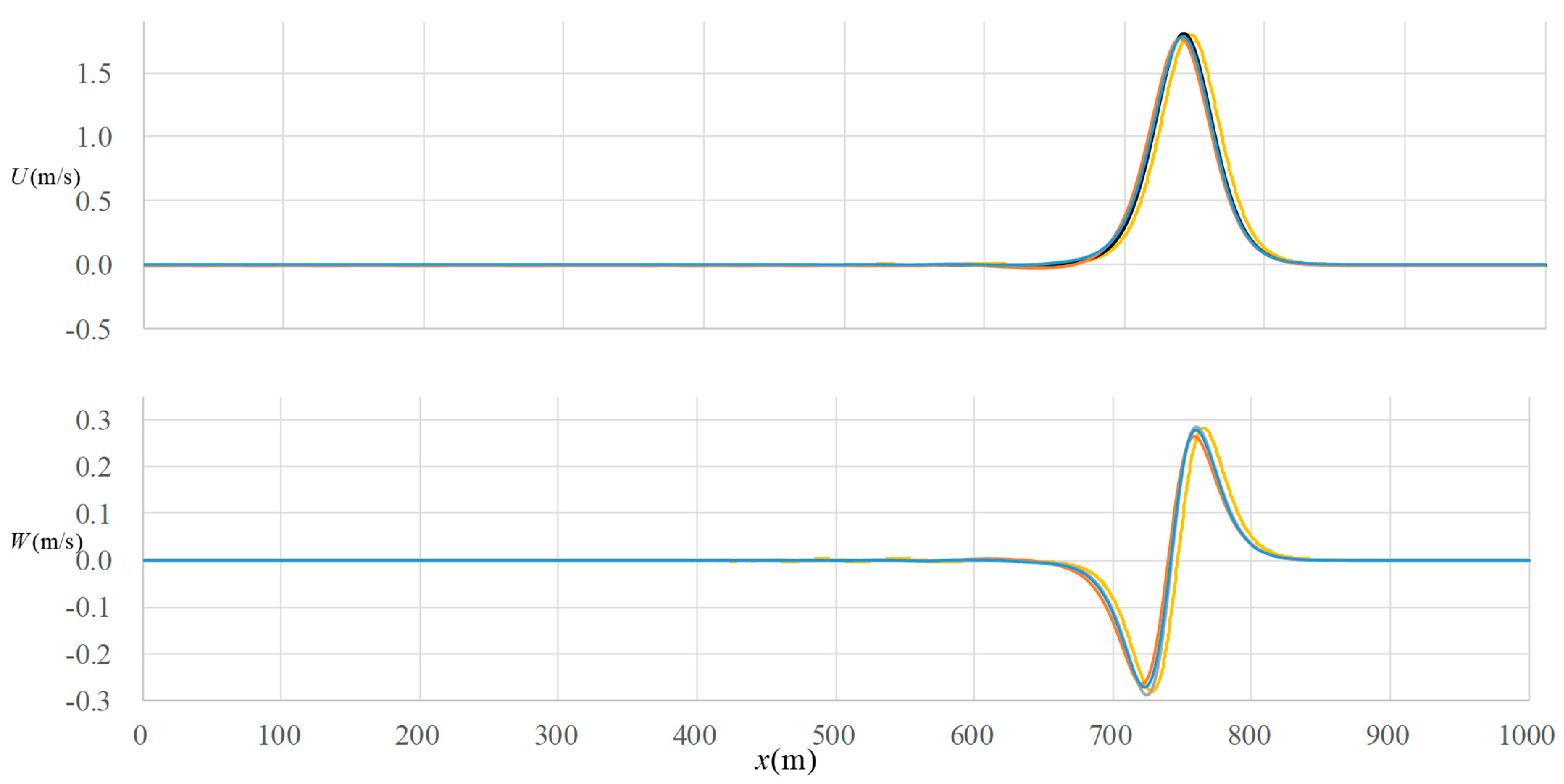
6.1. Propagation of a Solitary Wave in a Constant Depth
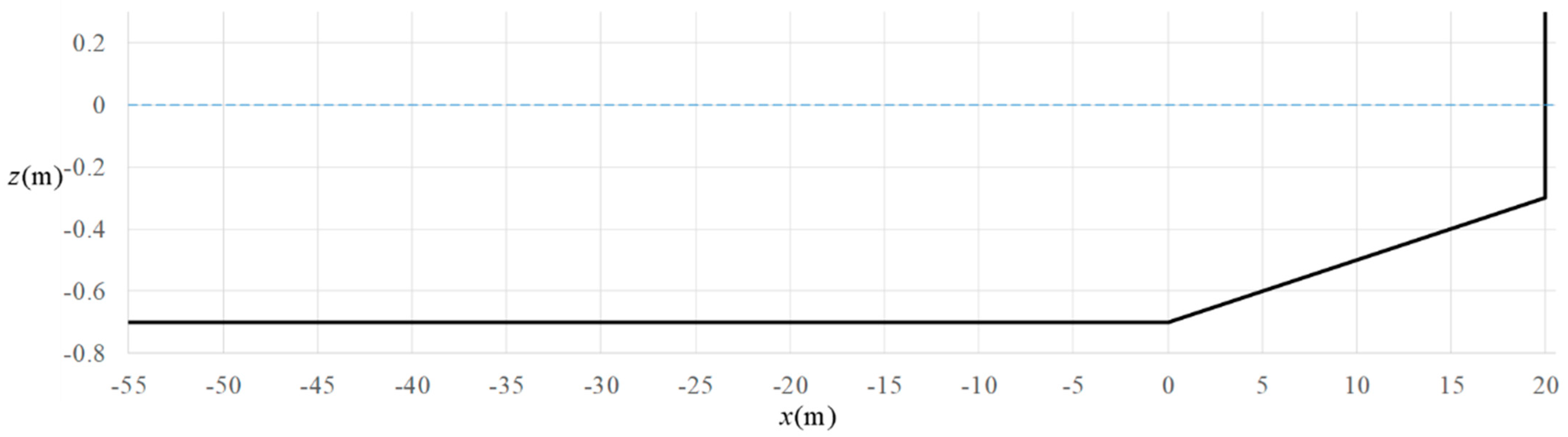
6.2. Solitary Wave Reflection after Running Up a Slope
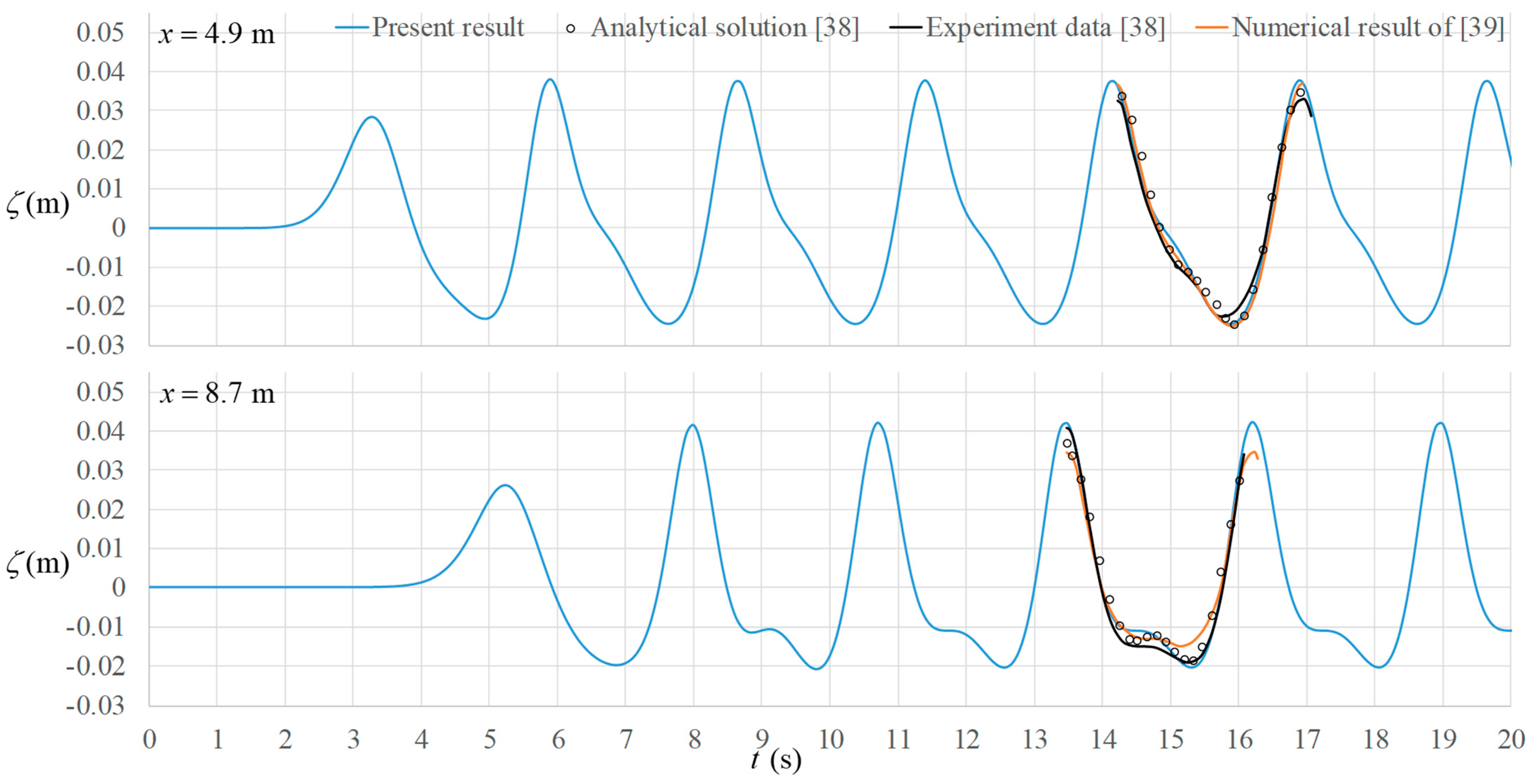
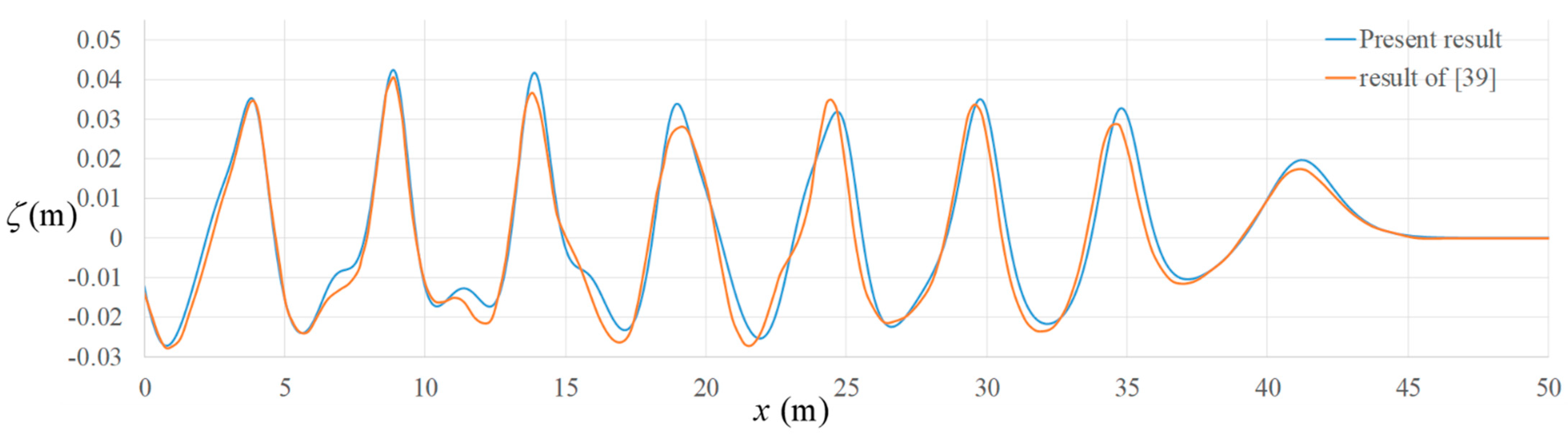
6.3. Nonlinear Waves Generated by a Large Stroke Harmonic Motion of a Piston Type Wave Maker
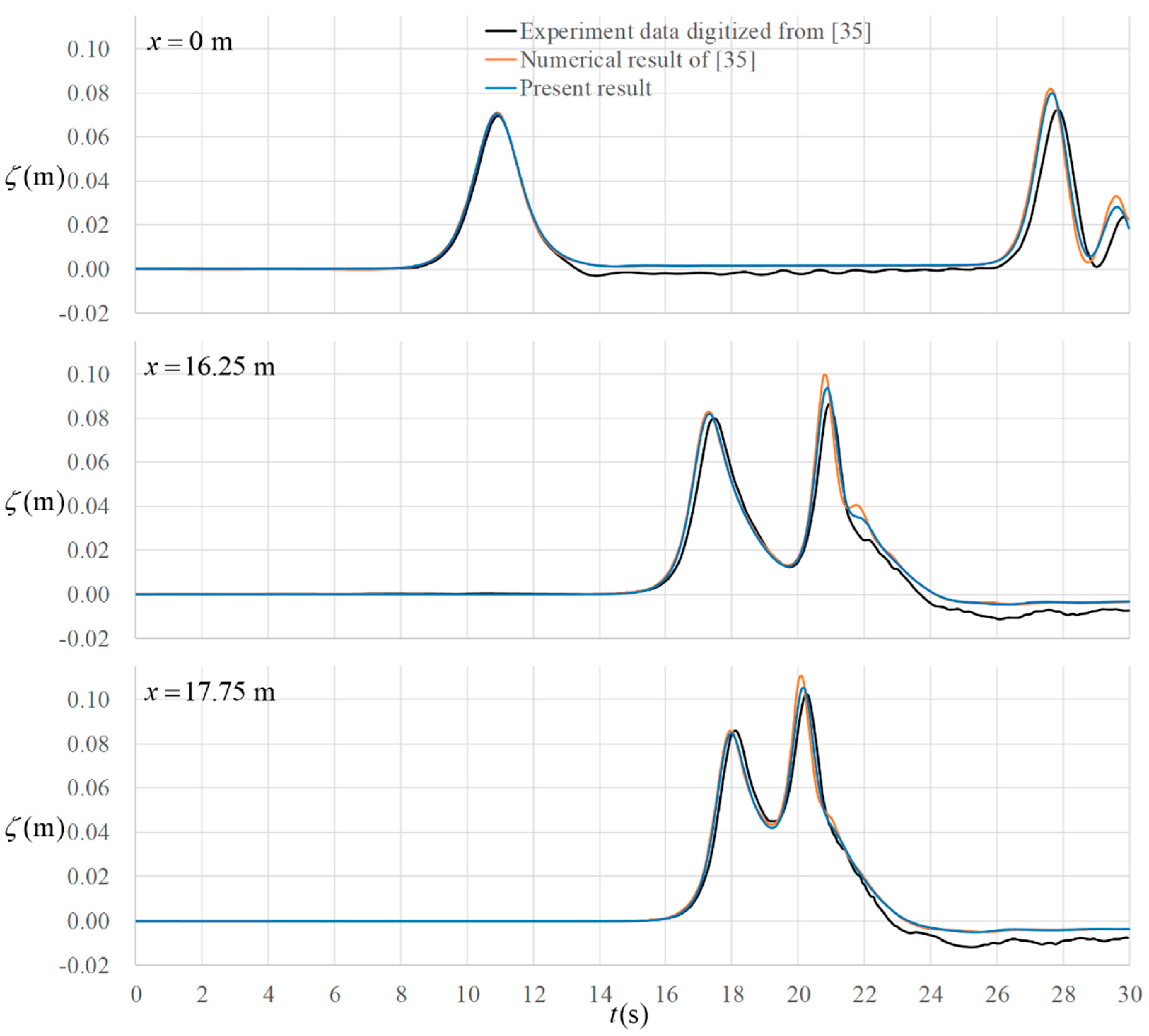
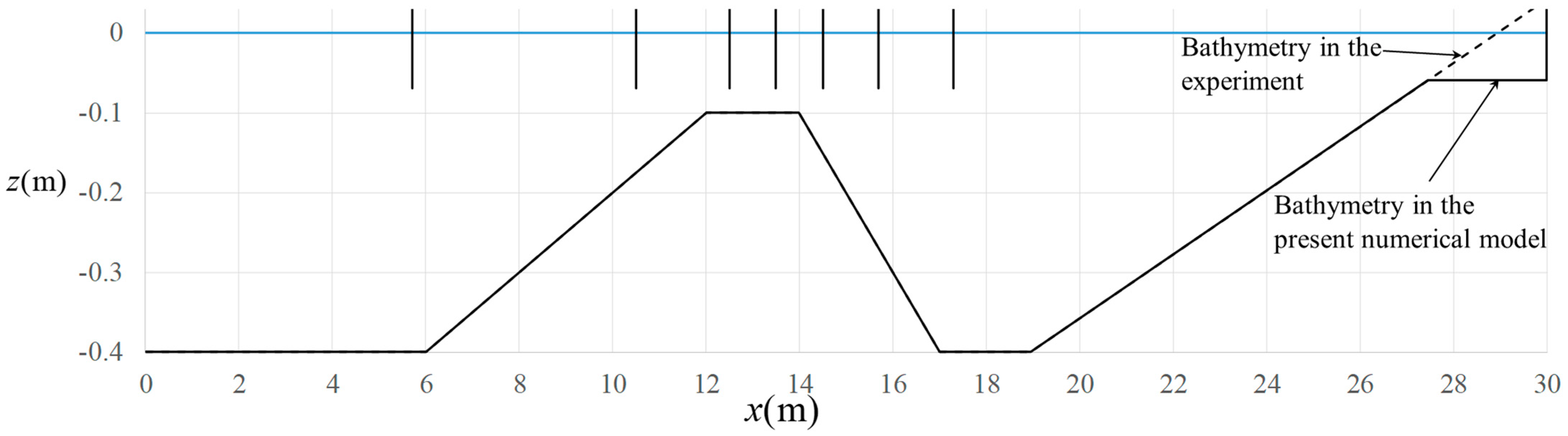
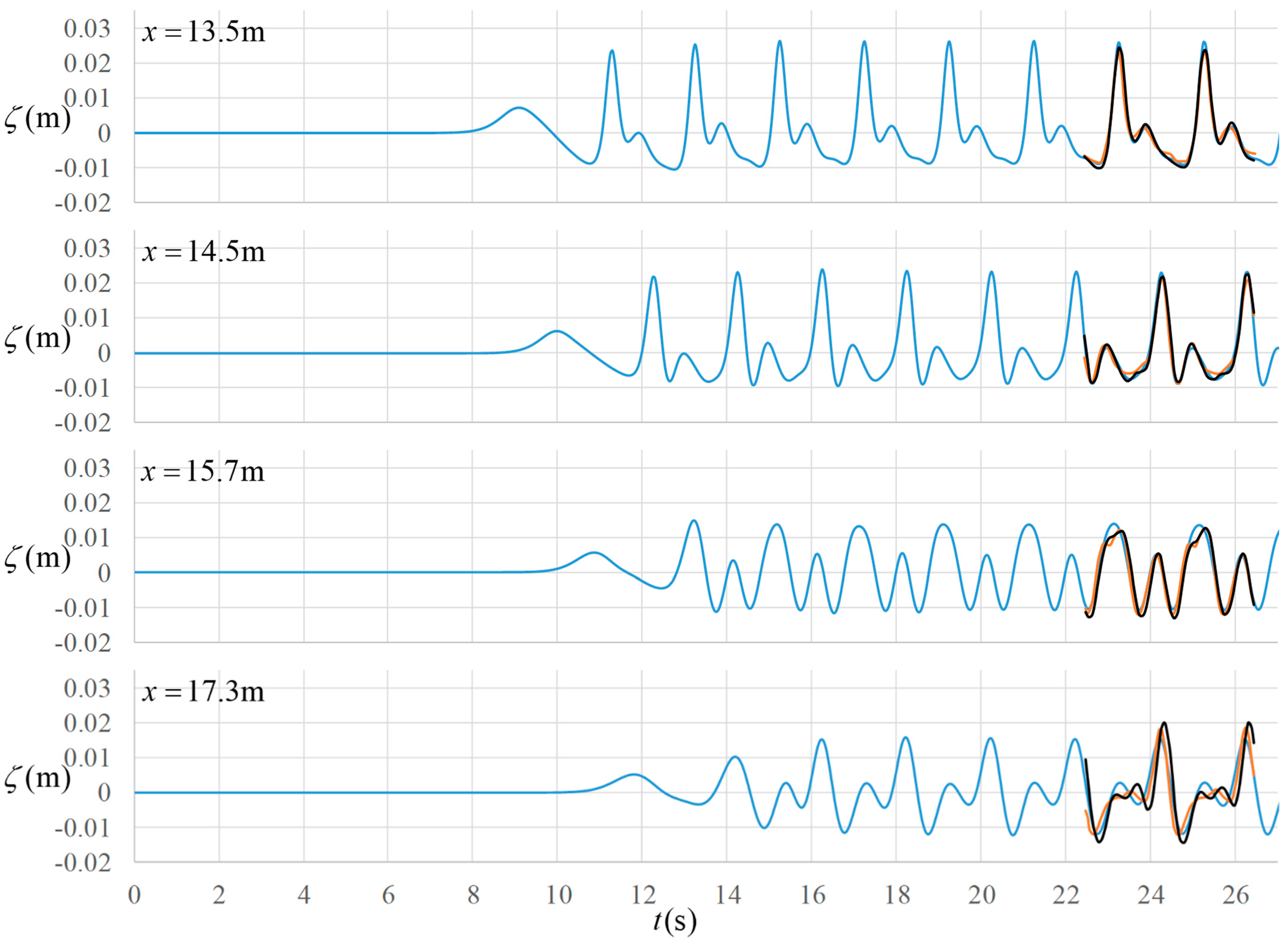
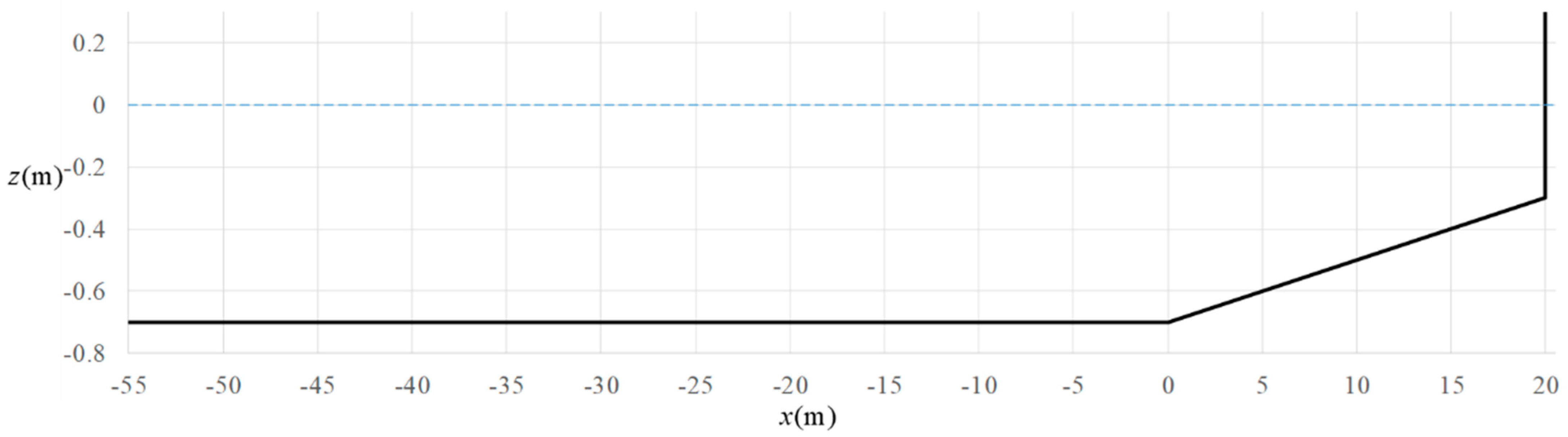
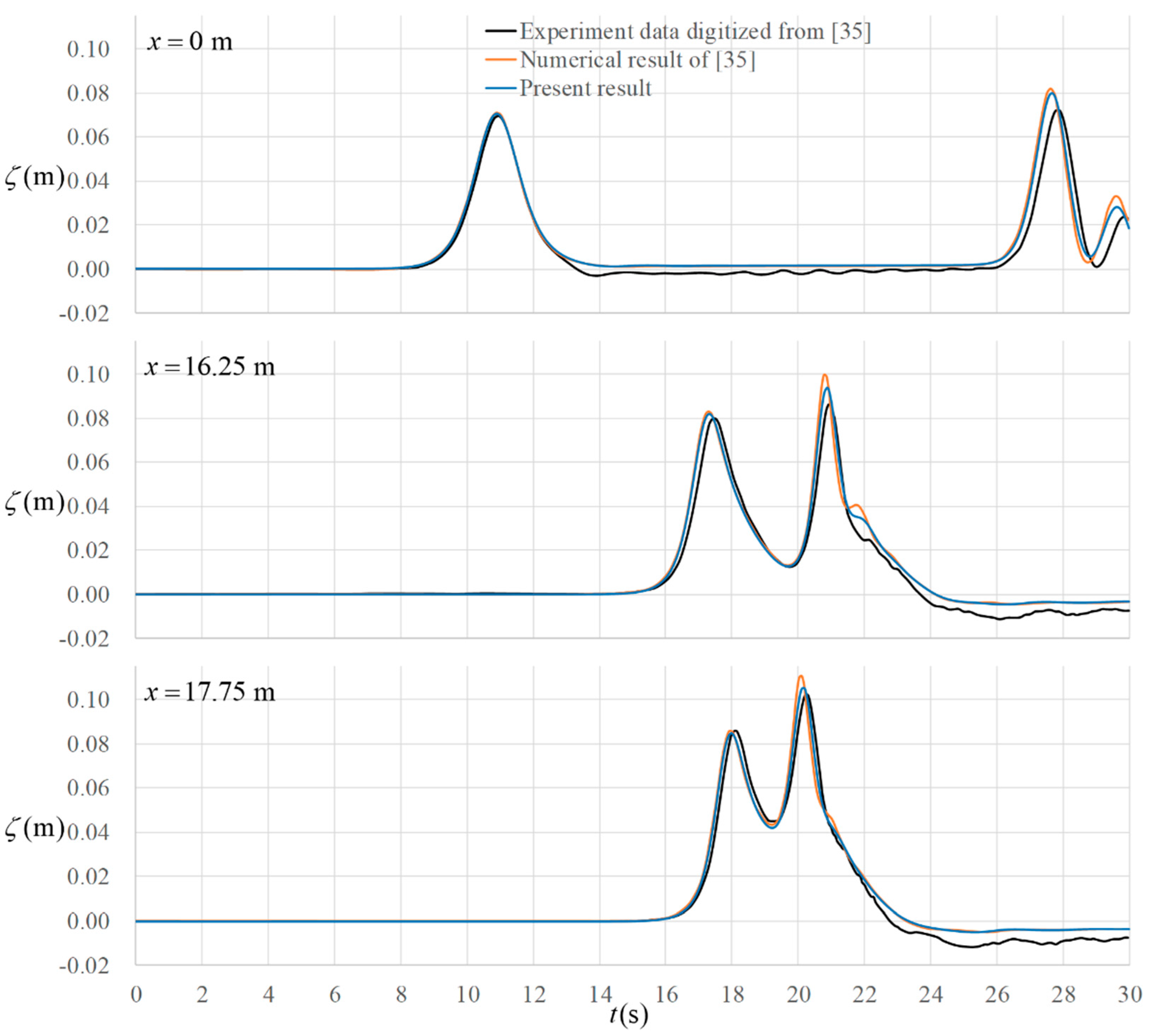
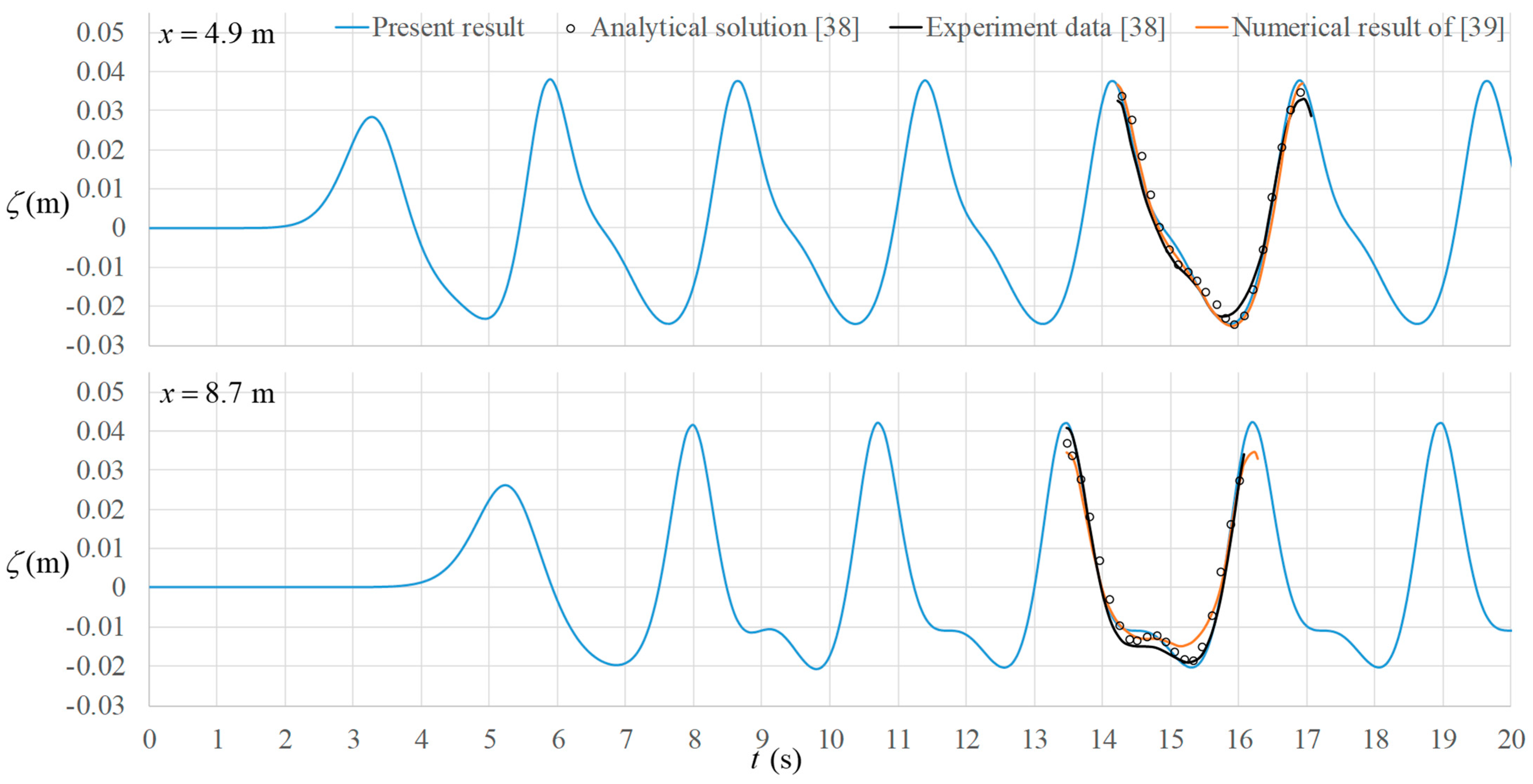
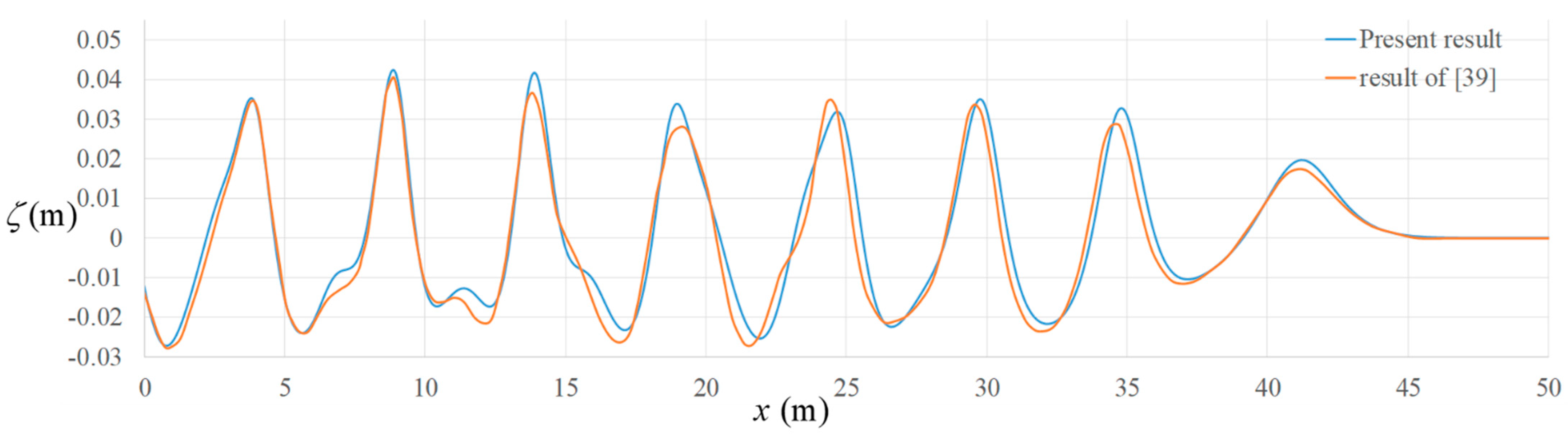
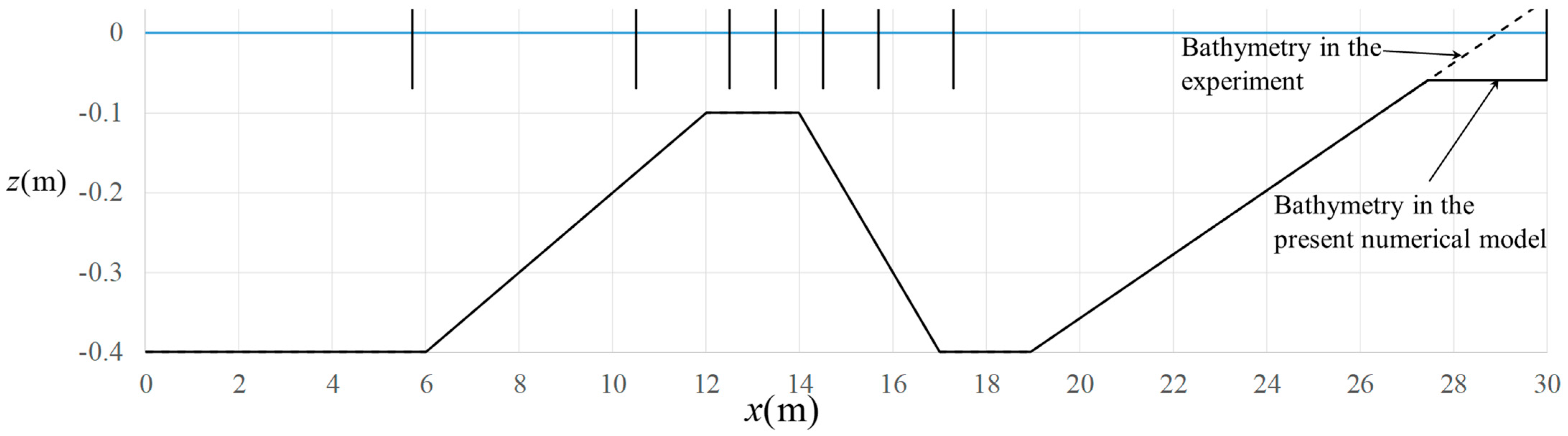
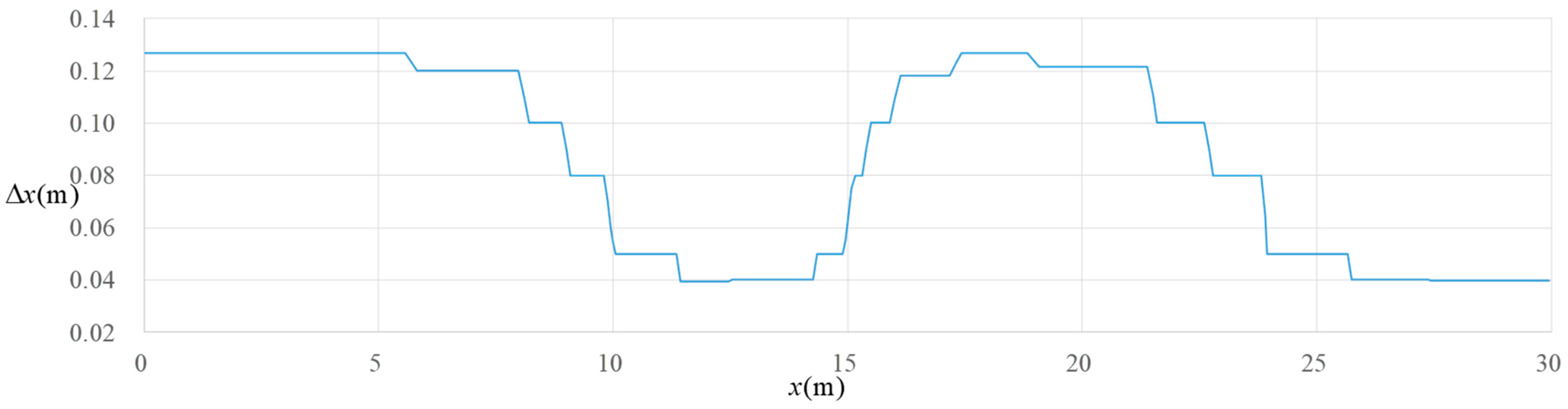
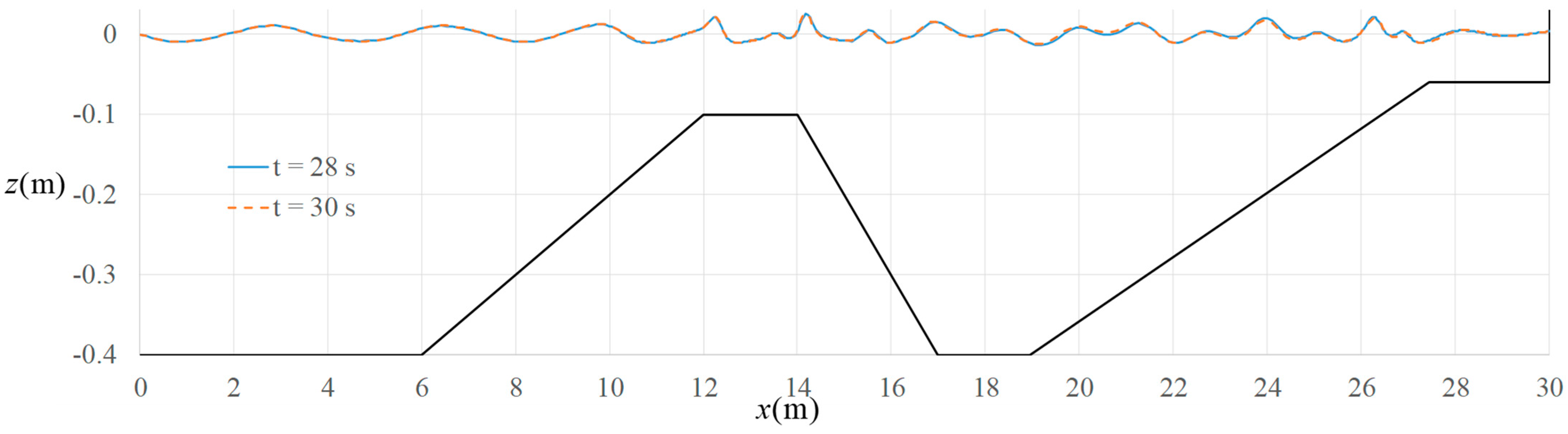
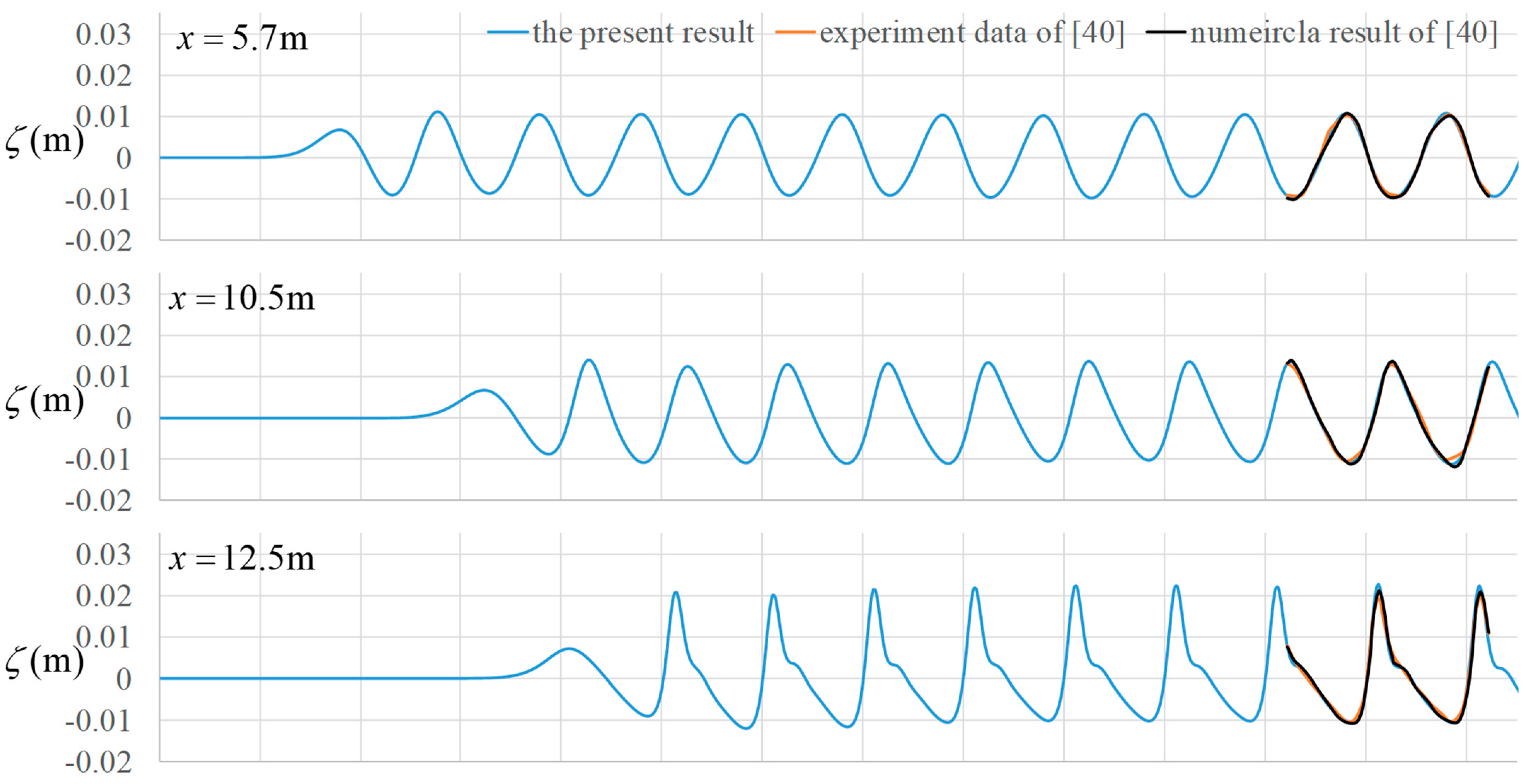
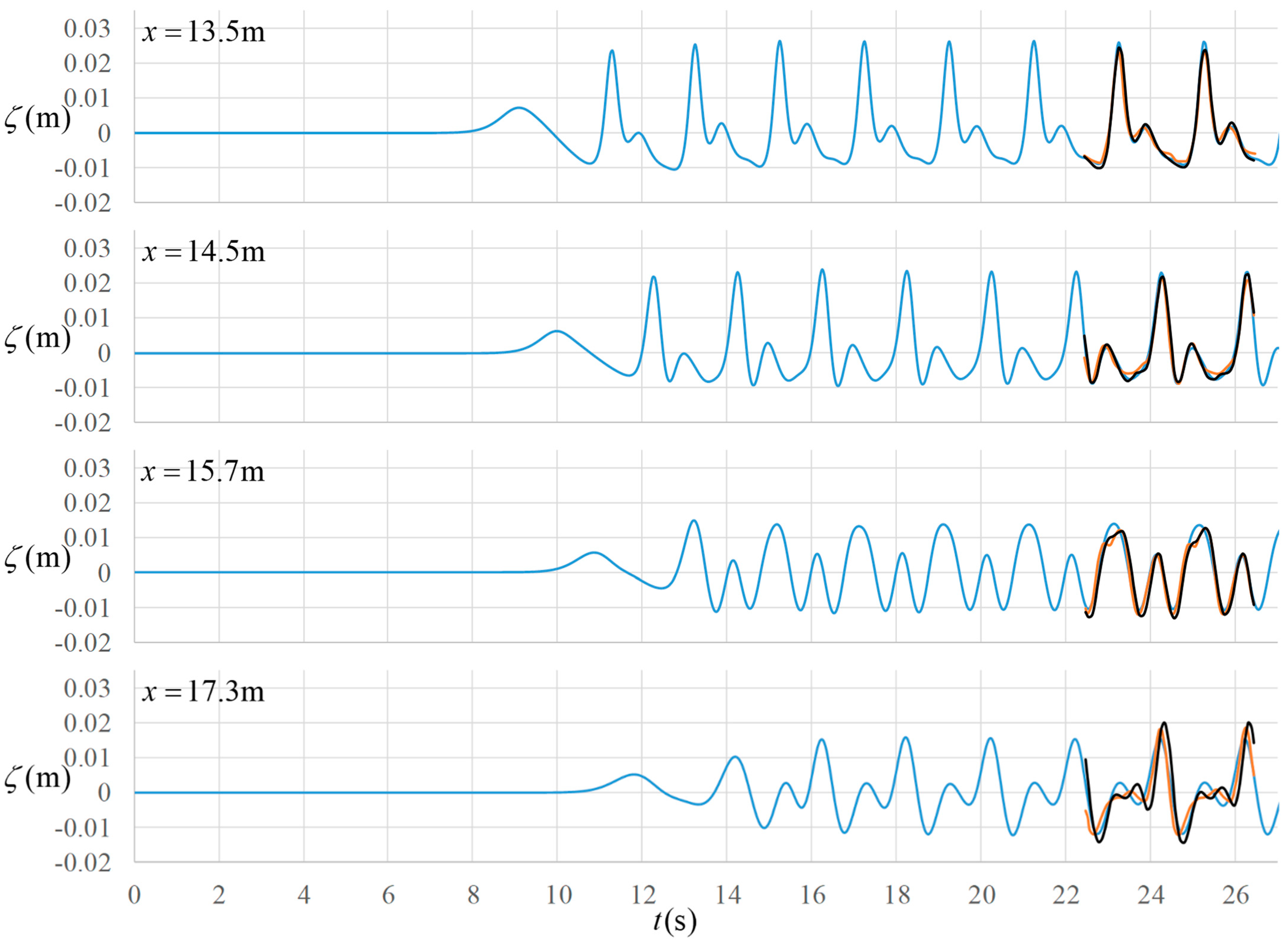
6.4. The Nonlinear Modulation of Periodic Waves Passing over a Submerged Obstacle
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| WLS | Weighted-least-squares |
| MLS | Moving-least-squares |
| SWE | Shallow water equations |
| FDM | Finite difference method |
| FEM | Finite element method |
| BEM | Boundary element method |
References
- Bristeau, M.-O.; Goutal, N.; Sainte-Marie, J. Numerical simulations of a non-hydrostatic shallow water model. Comput. Fluids 2011, 47, 51–64. [Google Scholar]
- Kang, L.; Jing, Z. Depth-averaged non-hydrostatic hydrodynamic model using a new multithreading parallel computing method. Water 2017, 9, 184. [Google Scholar]
- Liang, S.-J.; Young, C.-C.; Dai, C.; Wu, N.-J.; Hsu, T.-W. Simulation of ocean circulation of Dongsha water using non-hydrostatic shallow-water model. Water 2020, 12, 2832. [Google Scholar]
- Horrillo, J.; Kowalik, Z.; Shigihara, Y. Wave dispersion study in the Indian Ocean-Tsunami of December 26, 2004. Mar. Geod. 2006, 29, 149–166. [Google Scholar]
- Mayer, S.; Garapon, A.; Sorensen, L.S. A fractional step method for unsteady free-surface flow with applications to non-linear wave dynamics. Int. J. Numer. Methods Fluids 1998, 28, 293–315. [Google Scholar]
- Casulli, V. A semi-implicit finite difference method for non-hydrostatic free surface flows. Int. J. Numer. Methods Fluids 1999, 30, 425–440. [Google Scholar]
- Namin, M.; Lin, B.; Falconer, R. An implicit numerical algorithm for solving non-hydrostatic free-surface flow problems. Int. J. Numer. Methods Fluids 2001, 35, 341–356. [Google Scholar]
- Yuan, H.; Wu, C.H. An implicit 3D fully non-hydrostatic model for free-surface flows. Int. J. Numer. Methods Fluids 2004, 46, 709–733. [Google Scholar]
- Choi, D.Y.; Wu, C.H. A new efficient 3D non-hydrostatic free-surface flow model for simulating water wave motions. Ocean Eng. 2006, 33, 587–609. [Google Scholar]
- Ma, G.; Shi, F.; Kirby, J.T. Shock-capturing non-hydrostatic model for fully dispersive surface wave process. Ocean Model. 2012, 43–44, 22–35. [Google Scholar]
- Stelling, G.S.; Zijlema, M. An accurate and efficient finite-difference algorithm for non-hydrostatic free-surface flow with application to wave propagation. Int. J. Numer. Methods Fluids 2003, 43, 1–23. [Google Scholar]
- Keller, H.B. A new difference scheme for parabolic problems. In Numerical Solutions of Differential Equations-II, Proceedings of the Second Symposium on the Numerical Solution of Partial Differential Equations; Hubbard, B., Ed.; Academic Press: New York, NY, USA, 1971; pp. 327–350. [Google Scholar]
- Waters, R.A. A semi-implicit finite element model for non-hydrostatic (dispersive) surface waves. Int. J. Numer. Methods Fluids 2005, 49, 721–737. [Google Scholar]
- Peregrine, D.H. Long waves on a beach. J. Fluid Mech. 1967, 27, 815–827. [Google Scholar]
- Yamazaki, Y.; Kowalik, Z.; Cheung, K.F. Depth-averaged non-hydrostatic model for wave breaking and run-up. Int. J. Numer. Methods Fluids 2009, 61, 473–497. [Google Scholar]
- Zijlema, M.; Stelling, G.S. Efficient computation of surf zone waves using the nonlinear shallow water equations with non-hydrostatic pressure. Coast. Eng. 2008, 55, 780–790. [Google Scholar]
- Wei, P.; Jia, Y. A depth-integrated non-hydrostatic finite element model wave propagation. Int. J. Numer. Methods Fluids 2013, 73, 976–1000. [Google Scholar]
- Aricò, C.; Re, C.L. A non-hydrostatic pressure distribution solver for the nonlinear shallow water equations over irregular topography. Adv. Water Resour. 2016, 98, 47–69. [Google Scholar]
- Wang, W.; Martin, T.; Kamath, A.; Bihs, H. An improved depth-averaged nonhydrostatic shallow water model with quadratic pressure approximation. Int. J. Numer. Methods Fluids 2020, 92, 803–824. [Google Scholar]
- Hon, Y.-C.; Cheng, K.F.; Mao, X.-Z.; Kansa, E.J. Multiquadric solution for shallow water equations. J. Hydraul. Eng. ASCE 1999, 125, 524–533. [Google Scholar]
- Wong, S.M.; Hon, Y.-C.; Golberg, M.A. Compactly supported radial basis functions for shallow water equations. Appl. Math. Comput. 2002, 127, 79–101. [Google Scholar]
- Alhuri, Y.; Naji, A.; Ouazar, D.; Taik, A. RBF based meshless method for large scale shallow water simulations: Experimental validation. Math. Model. Nat. Phenom. 2010, 5, 4–10. [Google Scholar]
- Sun, C.-P.; Young, D.L.; Shen, L.-H.; Chen, T.-F.; Hsian, C.-C. Application of localized meshless methods to 2D shallow water equation problems. Eng. Anal. Bound. Elem. 2013, 37, 1339–1350. [Google Scholar]
- Chou, C.K.; Sun, C.P.; Young, D.L.; Sladek, J.; Sladek, V. Extrapolated local radial basis function collocation method for shallow water problems. Eng. Anal. Bound. Elem. 2015, 50, 275–290. [Google Scholar]
- Malidareh, B.F.; Hosseini, S.A.; Jabbari, E. Discrete mixed subdomain least squares (DMSLS) meshless method with collocation points for modeling dam-break induced flows. J. Hydroinform. 2016, 18, 702–723. [Google Scholar]
- Wu, N.-J.; Chen, C.; Tsay, T.-K. Application of weighted-least-square local polynomial approximation to 2D shallow water equation problems. Eng. Anal. Bound. Elem. 2016, 68, 124–134. [Google Scholar]
- Li, P.-W.; Fan, C.-M. Generalized finite difference method for two-dimensional shallow water equations. Eng. Anal. Bound. Elem. 2017, 80, 58–71. [Google Scholar]
- Chaabelasri, E.; Jeyar, M.; Borthwick, A.G.L. Explicit radial basis function collocation method for computing shallow water flows. Procedia Comput. Sci. 2019, 148, 361–370. [Google Scholar]
- Hsu, T.-W.; Liang, S.-J.; Wu, N.-J. Application of Meshless SWE Model to Moving Wet/Dry Front Problems. Eng. Comput. 2019, 35, 291–303. [Google Scholar]
- Hsu, T.-W.; Liang, S.-J.; Wu, N.-J. A 2D SWE meshless model with fictitious water level at dry nodes. J. Hydraul. Res. 2021, in press. [Google Scholar] [CrossRef]
- Avesani, D.; Dumbser, M.; Chiogna, G.; Bellin, A. An alternative smooth particle hydrodynamics formulation to simulate chemotaxis in porous media. Math. Biol. 2017, 74, 1037–1058. [Google Scholar]
- Antona, R.; Vacondio, R.; Avesani, D.; Righetti, M.; Renzi, M. Towards a High Order Convergent ALE-SPH Scheme with Efficient WENO Spatial Reconstruction. Water 2021, 13, 2432. [Google Scholar] [CrossRef]
- Avesani, D.; Dumbser, M.; Vacondio, R.; Righetti, M. An alternative SPH formulation: ADER-WENO-SPH. Comput. Methods Appl. Mech. Eng. 2021, 382, 113871. [Google Scholar]
- Walkley, M.; Berzins, M. A finite element method for the one-dimensional extended Boussinesq equations. Int. J. Numer. Methods Fluids 1999, 29, 143–157. [Google Scholar]
- Walkley, M.A. A Numerical Method for Extended Boussinesq Shallow-Water Wave Equations. Ph.D. Thesis, University of Leeds, Leeds, UK, September 1999. [Google Scholar]
- Dodd, N. A numerical model of wave run-up, overtopping and regeneration. J. Waterw. Port Coast. Ocean Eng. ASCE 1999, 124, 73–81. [Google Scholar]
- Havelock, T.H. Forced surface-waves on water. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1929, 8, 569–576. [Google Scholar]
- Madsen, O.S. On the generation of long waves. J. Geophys. Res. 1971, 76, 8672–8683. [Google Scholar]
- Dong, C.-M.; Huang, C.-J. Generation and propagation of water waves in a two-dimensional numerical viscous wave flume. J. Waterw. Port Coast. Ocean Eng. ASCE 2004, 130, 143–153. [Google Scholar]
- Ohyama, T.; Beji, S.; Nadoka, K.; Battjes, J.A. Experimental verification of numerical model for nonlinear wave evolutions. J. Waterw. Port Coast. Ocean Eng. ASCE 1994, 20, 637–644. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, N.-J.; Su, Y.-M.; Hsiao, S.-C.; Liang, S.-J.; Hsu, T.-W. A Weighted-Least-Squares Meshless Model for Non-Hydrostatic Shallow Water Waves. Water 2021, 13, 3195. https://doi.org/10.3390/w13223195
Wu N-J, Su Y-M, Hsiao S-C, Liang S-J, Hsu T-W. A Weighted-Least-Squares Meshless Model for Non-Hydrostatic Shallow Water Waves. Water. 2021; 13(22):3195. https://doi.org/10.3390/w13223195
Chicago/Turabian StyleWu, Nan-Jing, Yin-Ming Su, Shih-Chun Hsiao, Shin-Jye Liang, and Tai-Wen Hsu. 2021. "A Weighted-Least-Squares Meshless Model for Non-Hydrostatic Shallow Water Waves" Water 13, no. 22: 3195. https://doi.org/10.3390/w13223195
APA StyleWu, N.-J., Su, Y.-M., Hsiao, S.-C., Liang, S.-J., & Hsu, T.-W. (2021). A Weighted-Least-Squares Meshless Model for Non-Hydrostatic Shallow Water Waves. Water, 13(22), 3195. https://doi.org/10.3390/w13223195