
Technologies and Equipment of Mechanized Blossom Thinning in Orchards: A Review


 ,
,
Abstract
:1. Introduction
2. Mechanism Research
2.1. Thinning Force
2.2. Thinning Agronomy
2.3. Thinning Model
3. Machine Development
3.1. Hand-Held Thinner
3.2. Tractor-Mounted Thinner
4. Intelligent Upgrading
5. Conclusions and Future Perspectives
5.1. Orchard Planting Pattern
5.2. Mechanical Structure of the Thinning Arm
5.3. Material of the Thinning Rope
5.4. Parameterized Thinning Operation Model
5.5. Intelligent Thinning
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Bureau of Statistics of the People’s Republic of China. Chinese Statistical Yearbook; China Statistics Press: Beijing, China, 2023; 935p. [Google Scholar]
- Zheng, Y.J.; Chen, B.T.; Lyu, H.T.; Kang, F.; Jiang, S.J. Research progress of orchard plant protection mechanization technology and equipment in China. J. Trans. Chin. Soc. Agric. Eng. 2020, 36, 110–124. [Google Scholar]
- Zheng, Y.J.; Jiang, S.J.; Chen, B.T.; Lyu, H.T.; Wang, C.; Kang, F. Review on technology and equipment of mechanization in hilly orchard. J. Trans. Chin. Soc. Agric. Mech. 2020, 51, 1–20. [Google Scholar]
- Wang, W.H.; Wang, G.P.; Tian, L.M.; Li, X.G.; Lyu, X.L.; Zhang, Y.X.; Zhang, J.H.; Cao, Y.F. Fruit scientific research in new China in the past 70 years: Pear. J. Fruit Sci. 2019, 36, 1273–1282. [Google Scholar]
- Zhao, Y.; Xiao, H.R.; Mei, S.; Song, Z.Y.; Ding, W.Q.; Jin, Y.; Han, Y.; Xia, X.F.; Yang, G. Current status and development strategies of orchard mechanization production in China. J. Chin. Agric. Univ. 2017, 22, 116–127. [Google Scholar]
- Qiao, Z.X. Impact of Agricultural Labor Aging on Production Behavior of Apple Households: A Case Study from Shanxi and Gansu Province; Northwest A&F University: Xianyang, China, 2018; 202p. [Google Scholar]
- Rivero, R.; Sonsteby, A.; Heide, O.M.; Mage, F.; Remberg, S.F. Flowering phenology and the interrelations between phenological stages in apple trees (Malus domestica Borkh.) as influenced by the Nordic climate. Acta Agric. Svandinavica Section B-Soil Plant Sci. 2017, 67, 292–302. [Google Scholar]
- Pavanello, A.P.; Zoth, M.; Ayub, R.A. Manage of crop load to improve fruit quality in plums. Rev. Bras. Frutic. 2018, 40, 721. [Google Scholar] [CrossRef]
- Barreto, C.F.; Antunes, L.E.; Ferreira, L.V.; Navroski, R.; Benati, J.A.; Pereira, J.F. Mechanical flower thinning in peach trees. Rev. Bras. Frutic. 2019, 41, 465. [Google Scholar] [CrossRef]
- Robinson, T.L.; Lakso, A.N. Predicting chemical thinner response with a carbohydrate model. Acta Horticul. 2011, 903, 743–750. [Google Scholar] [CrossRef]
- Miller, S.S.; Tworkoski, T. Blossom thinning in apple and peach with an essential oil. HortScience 2010, 45, 1218–1225. [Google Scholar] [CrossRef]
- Hampson, C.; Bedford, K. Efficacy of blossom thinning treatments to reduce fruit set and increase fruit size of ambrosia and aurora golden gala (TM) apples. Can. J. Plant Sci. 2011, 91, 983–990. [Google Scholar] [CrossRef]
- Hu, C.Q.; Sun, C.H.; Xu, Y. Experiment and analysis of mechanical properties for branches pedicel node and receptacles corolla node of apple tree. J. Qingdao Agric. Univ. 2015, 32, 211–214. [Google Scholar]
- Sun, C.H.; Hu, C.Q.; Hou, Q.S.; Pan, Z.G. Simulation of mechanical thinning flower actuator based on ADAMS. J. Agric. Mech. Res. 2015, 37, 70–73. [Google Scholar]
- Hu, C.Q.; Sun, C.H.; Ji, J. Performance experiment and analysis on mechanical thinning flower actuator. J. Chin. Agric. Mech. 2015, 36, 24–28. [Google Scholar] [CrossRef]
- Hu, C.Q.; Sui, R.D. Fruit Tree Mechanical Blossom Thinning Machine Performance Test Bench. P. China CN103454077B, 4 May 2016. [Google Scholar]
- Hu, C.Q.; Sui, R.D. Hydraulic Fruit Tree Blossom Thinning Machine and Method Based on Machine Vision. P. China CN103081730B, 10 September 2014. [Google Scholar]
- Hu, C.Q.; Sui, R.D. Hydraulic transmission type fruit tree flower thinning machine based on machine vision and flower thinning method. P. China CN203120538U, 14 August 2013. [Google Scholar]
- Yuan, C.W.D. Design and Performance Test of Peach Blossom Thinning Machine; Hebei Agricultural University: Baoding, China, 2020; 64p. [Google Scholar]
- Wang, Q.D. Design and Research of Mechanical Blossom Thinning Device for the Dwarf Dense Fruit Trees; Hebei Agricultural University: Baoding, China, 2018; 71p. [Google Scholar]
- Yang, X.; Wang, P.F.; Li, J.P.; Liu, H.J.; Shao, J.Z.; Qian, J. Wide Row Close Planting Fruit Tree Blossom Thinning Machine. P. China CN210381974U, 24 April 2020. [Google Scholar]
- Assirelli, A.; Caracciolo, G.; Cacchi, M.; Sirri, S.; Pallottino, F.; Costa, C. Evaluation of the detachment force needed for mechanical thinning of green peach fruits. Sustainability 2018, 10, 2291. [Google Scholar] [CrossRef]
- Sidhu, R.S.; Bound, S.A.; Hunt, I. Crop load and thinning methods impact yield, nutrient content, fruit quality, and physiological disorders in ‘Scilate’ apples. Agronomy 2022, 12, 1989. [Google Scholar] [CrossRef]
- De Oliveira, P.D.; Bettio Marodin, G.A.; De Almeida, G.K.; Gonzatto, M.P.; Darde, D.C. Heading of shoots and hand thinning of flowers and fruits on ‘BRS Kampai’ peach trees. Pesqui. Agropecu. Bras. 2017, 52, 1006–1016. [Google Scholar] [CrossRef]
- Szot, I.; Lipa, T. Apple trees yielding and fruit quality depending on the crop load, branch type and position in the crown. Acta Sci. Pol. Hortoru. 2019, 18, 205–215. [Google Scholar] [CrossRef]
- Han, W.W.; Han, N.; He, X.; Zhao, X.J. Berry thinning to reduce bunch compactness improves fruit quality of Cabernet Sauvignon (Vitis vinifera L.). Sci. Hortic. 2019, 246, 589–596. [Google Scholar] [CrossRef]
- Nie, P.X.; Lu, C.; Xue, X.M.; Wang, G.P.; Wang, J.Z. Effects of apple inflorescence thinning at different periods on fruit set rate and fruit quality. J. Hebei Agric. Sci. 2013, 17, 27–29. [Google Scholar]
- Hua, M.; Deng, H.D.; Guo, L.J.; Feng, X.J.; Chen, L.M. Effects of mechanical flowerthinning and chemical fruit thinning on average seedless fruit weight and quality of ‘Tainong No.1′ mango. Chin. Tropic. Agric. 2021, 4, 42–46+80. [Google Scholar]
- Iwanami, H.; Moriya-Tanaka, Y.; Honda, C.; Hanada, T.; Wada, M. A model for representing the relationships among crop load, timing of thinning, flower bud formation, and fruit weight in apples. Sci. Hortic. 2018, 242, 181–187. [Google Scholar] [CrossRef]
- Pellerin, B.P.; Buszard, D.; Iron, D.; Embree, C.G.; Marini, R.P.; Nichols, D.S.; Neilsen, G.H.; Nelsen, D. A theory of blossom thinning to consider maximum annual flower bud numbers on biennial apple trees. Hortscience 2011, 46, 40–42. [Google Scholar] [CrossRef]
- Manfrini, L.; Taylor, J.A.; Grappadelli, L.C. Spatial analysis of the effect of fruit thinning on apple crop load. Eur. J. Hortic. Sci. 2009, 74, 54–60. [Google Scholar]
- Reginato, G.H.; De Cortazar, V.G.; Robinson, T.L. Predicted crop value for nectarines and cling peaches of different harvest season as a function of crop load. Hortscience 2007, 42, 239–245. [Google Scholar] [CrossRef]
- Infaco. Available online: https://www.infaco.com/fr/produits/eclaircisseuse-ec1700-powercoup-pw3/ (accessed on 22 April 2023).
- Cinch. Available online: https://blossomcinch.com/ (accessed on 22 April 2023).
- Lakewoodproducts. Available online: https://www.lakewoodproducts.co.nz/horticulture/electronic-blossom-thinners/ (accessed on 22 April 2023).
- Volpi. Available online: https://www.volpioriginale.it/en/product/giulivo-plus/ (accessed on 22 April 2023).
- Campagnola. Available online: https://www.campagnola.co.uk/engine-driven-hook-shaker/gsm-el-toro/ (accessed on 22 April 2023).
- Gong, H.J.; Li, J.W.; Wang, F.M.; Mo, Q.H.; Ye, K.Y.; Jiang, Q.S.; Liu, P.P.; Qi, B.B. Hand-Held Kiwi Fruit Thinning Device. P. China CN217308396U, 30 August 2022. [Google Scholar]
- Zhao, J.Z.; Wang, L.X.; Tang, H.; Shu, W.M. An Electric Knapsack Blossom Thinning Machine. P. China CN112930929A, 11 June 2021. [Google Scholar]
- Liu, K.Y.; Liu, Y.L.; Wang, X.D.; Li, J. Hand-Held Pomelo Blossom Thinning Device. P. China CN216492184U, 13 May 2022. [Google Scholar]
- Xyu, L.M.; Yan, C.G.; Ma, S.; Niu, C.; Zhao, S.J.; Wang, S.S.; Yuan, X.T. Hand-Held Bag-Shaped Flower and Fruit Thinning Device. P. China CN212677848U, 12 March 2021. [Google Scholar]
- Zhao, X.; Yang, Y.; Luo, L.J. Hand-Held Citrus Flower Thinning Machine. P. China CN211509900U, 18 September 2020. [Google Scholar]
- Chen, A.M.; Xyu, S.H.; Shang, Z. Electric Flower and Fruit Thinning Device. P. China CN210808375U, 23 June 2020. [Google Scholar]
- Chen, W. Device for Thinning Flower, Fruit and Small Grains Fruit. P. China CN209057550U, 5 July 2019. [Google Scholar]
- Zheng, J.G.; Zheng, J.Y.; Zheng, J.F.; Zheng, J.Y.; Zheng, L.M. Hand-Held Blossom Thinning Machine for Citrus. P. China CN208836605U, 10 May 2019. [Google Scholar]
- Lu, H.Z.; Li, J.; Yang, Z.; Wu, M.C.; Qiu, J.H. Ultrasonic Target Detection Orchard Thinning Machine. P. China CN102217493B, 22 August 2012. [Google Scholar]
- Yang, Z.; Li, J.; Lu, H.Z.; Lin, B.Q.; Tan, J.H.; Wang, W.Z. Electric Orchard Thinner Convenient for Manual Adjustment and Its Use Method. P. China CN102217492B, 7 November 2012. [Google Scholar]
- Lei, X.H.; Lyu, X.L.; Zhang, M.N.; Ma, Z.B.; Chang, Y.H.; Andreas, H. Test and research on electric rotating rope blossom thinner in ‘Cuiguan’ pear orchard. J. Chin. Agric. Mech. 2020, 41, 47–52. [Google Scholar]
- Zhang, B.B.; Ma, R.J.; Guo, L.; Yyu, M.L.; Song, H.F.; Zhang, G.P.; Feng, Z.R. Hand-Held Electric Blossom Thinning Device. P. China CN206791205U, 26 December 2017. [Google Scholar]
- Wang, M.; Wang, H.; Zhang, Q.; Lewis, K.M.; Scharf, P.A. A hand-held mechanical blossom thinning device for fruit trees. Appl. Eng. Agric. 2013, 29, 155–160. [Google Scholar] [CrossRef]
- Xyu, C.G.; Zhang, Q.; Zhuang, X.; He, H.Y. Portable Electric Equipment for Fruit Tree Blossom Thinning. P. China CN202617766U, 26 December 2012. [Google Scholar]
- Martin, B.; Torregrosa, A.; Brunton, J.G. Post-bloom thinning of peaches for canning with hand-held mechanical devices. Sci. Hortic. 2010, 125, 658–665. [Google Scholar] [CrossRef]
- Martin, B.; Torregrosa, A.; Brunton, J.G. Feasibility of peach bloom thinning with hand-held mechanical devices. Sci. Hortic. 2011, 129, 91–97. [Google Scholar] [CrossRef]
- Martin, B.; Torregrosa, A.; Aragon, R.; Brunton, J.G. Portable Mechanical Device for the Clarification of Flowers and Fruit Recience in Trees and Shrubs. P. Spanish ES200901448A, 2 June 2009. [Google Scholar]
- Spornberger, A.; Leder, L.; Bock, K.; Keppel, H.; Modl, P. Impact of thinning methods on yield, diseases and fruit quality of sweet cherries (Prunus avium L.) in organic growing. Erwerbs-Obstbau 2011, 53, 15–22. [Google Scholar] [CrossRef]
- Fruit-tec. Available online: https://fruit-tec.com/ (accessed on 20 July 2023).
- Wallis, A.E.; Miranda-Sazo, M.R.; Cox, K.D. Assessing and minimizing the development and spread of fire blight following mechanical thinning and pruning in apple orchards. Plant Dis. 2021, 105, 650–659. [Google Scholar] [CrossRef]
- Ngugi, H.K.; Schupp, J.R. Evaluation of the risk of spreading fire blight in apple orchards with a mechanical string blossom thinner. Hortscience 2009, 44, 863–865. [Google Scholar] [CrossRef]
- Penzel, M.; Pflanz, M.; Gebbers, R.; Zude-Sasse, M. Tree-adapted mechanical flower thinning prevents yield loss caused by over-thinning of trees with low flower set in apple. Eur. J. Hortic. Sci. 2021, 86, 88–98. [Google Scholar] [CrossRef]
- Lordan, J.; Alins, G.; Avila, G.; Torres, E.; Carbo, J.; Bonany, J.; Alegre, S. Screening of eco-friendly thinning agents and adjusting mechanical thinning on ‘Gala’, ‘Golden Delicious’ and ‘Fuji’ apple trees. Sci. Hortice. 2018, 239, 141–155. [Google Scholar] [CrossRef]
- Theron, K.I.; Steenkamp, H.; Steyn, W.J. Efficacy of ACC (1-aminocyclopropane-1-carboxylic acid) as a chemical thinner alone or combined with mechanical thinning for japanese plums (Prunus salacina). Hortscience 2017, 52, 110–115. [Google Scholar] [CrossRef]
- McClure, K.A.; Cline, J.A. Mechanical blossom thinning of apples and influence on yield, fruit quality and spur leaf area. Can. J. Plant Sci. 2015, 95, 887–896. [Google Scholar] [CrossRef]
- Sauerteig, K.A.; Cline, J.A. Mechanical blossom thinning of ‘Allstar’ peaches influences yield and quality. Sci. Hortic. 2013, 160, 243–250. [Google Scholar] [CrossRef]
- Baugher, T.A.; Ellis, K.; Remcheck, J.; Lesser, K.; Schupp, J.; Winzeler, E.; Reichard, K. Mechanical string thinner reduces crop load at variable stages of bloom development of peach and nectarine trees. Hortscience 2010, 45, 1327–1331. [Google Scholar] [CrossRef]
- Baugher, T.A.; Schupp, J.; Ellis, K.; Remcheck, J.; Winzeler, E.; Duncan, R.; Johnson, S.; Lewis, K.; Reighard, G.; Henderson, G.; et al. String blossom thinner designed for variable tree forms increases crop load management efficiency in trials in four united states peach-growing regions. Horttechnology 2010, 20, 409–414. [Google Scholar] [CrossRef]
- Baugher, T.A.; Schupp, J.R.; Lesser, K.M.; Hess-Reichard, K. Horizontal string blossom thinner reduces labor input and increases fruit size in peach trees trained to open-center systems. Horttechnology 2009, 19, 755–761. [Google Scholar] [CrossRef]
- Schupp, J.R.; Baugher, T.A. Peach blossom string thinner performance improved with selective pruning. Hortscience 2011, 46, 1486–1492. [Google Scholar] [CrossRef]
- Asteggiano, L.; Giordani, L.; Bevilacqua, A.; Vittone, G.; Pellegrino, S.; Costa, G. Bloom mechanical thinning improves fruit quality and reduces production costs in peach. Acta Hortic. 2015, 1084, 389–394. [Google Scholar] [CrossRef]
- La Canne Vale. Available online: https://www.lacannevale.fr (accessed on 20 July 2020).
- Assirelli, A.; Caracciolo, G.; Roccuzzo, G.; Stagno, F. New tools for mechanical thinning of apricot fruitlets. Agriculture 2021, 11, 1138. [Google Scholar] [CrossRef]
- Assirelli, A.; Giovannini, D.; Cacchi, M.; Sirri, S.; Baruzzi, G.; Caracciolo, G. Evaluation of a new machine for flower and fruit thinning in stone fruits. Sustainability 2018, 10, 4088. [Google Scholar] [CrossRef]
- Faugno, S.; Cacchi, M.; Sirri, S.; Caracciolo, G.; Giovannini, D.; Quacquarelli, I.; Civitarese, V.; Assirelli, A. Mechanical thinning of apricot fruitlets. Chemi. Eng. Trans. 2017, 58, 259–264. [Google Scholar]
- Clemens. Available online: https://www.clemens-online.com/en/products/ (accessed on 1 December 2022).
- Lei, X.H.; Lv, X.L.; Zhang, M.N.; Li, X.; Chang, Y.H.; Andreas, H. Development and test of three arms tractor-mounted flower thinner. J. Trans. Chin. Soc. Agric. Eng. 2019, 35, 31–38. [Google Scholar]
- Lei, X.H.; Lyu, X.L.; Zhang, M.N.; Lu, D.P.; Wang, S.L.; Chang, Y.H.; Zhong, D.X.; Shen, T.B. Performance evaluation of mechanical blossom thinning in trunk type pear orchard. Int. J. Agric. Biol. Eng. 2021, 14, 106–112. [Google Scholar] [CrossRef]
- Lammerich, S.; Kunz, A.; Damerow, L.; Blanke, M. Mechanical Crop Load Management (CLM) Improves Fruit Quality and Reduces Fruit Drop and Alternate Bearing in European Plum (Prunus domestica L.). Horticulturae 2020, 6, 52. [Google Scholar] [CrossRef]
- Seehuber, C.; Damerow, L.; Blanke, M. Regulation of source: Sink relationship, fruit set, fruit growth and fruit quality in European plum (Prunus domestica L.)-using thinning for crop load management. Plant Growth Regul. 2011, 65, 335–341. [Google Scholar] [CrossRef]
- Peifer, L.; Ottnad, S.; Kunz, A.; Damerow, L.; Blanke, M. Effect of non-chemical crop load regulation on apple fruit quality, assessed by the DA-meter. Sci. Hortic. 2018, 233, 526–531. [Google Scholar] [CrossRef]
- Damerow, L.; Kunz, A.; Blanke, M. Regulation of fruit set by mechanical flower thinning. Erwerbs-Obstbau 2007, 49, 1–9. [Google Scholar] [CrossRef]
- Hehnen, D.; Hanrahan, I.; Lewis, K.; McFerson, J.; Blanke, M. Mechanical flower thinning improves fruit quality of apples and promotes consistent bearing. Sci. Hortic. 2012, 134, 241–244. [Google Scholar] [CrossRef]
- Solomakhin, A.A.; Blanke, M. Mechanical flower thinning improves the fruit quality of apples. J. Sci. Food and Agric. 2010, 90, 735–741. [Google Scholar] [CrossRef]
- Schupp, J.R.; Baugher, T.A.; Miller, S.S.; Harsh, R.M.; Lesser, K.M. Mechanical thinning of peach and apple trees reduces labor input and increases fruit size. Horttechnology 2008, 18, 660–670. [Google Scholar] [CrossRef]
- Miller, S.S.; Schupp, J.R.; Baugher, T.A.; Wolford, S.D. Performance of mechanical thinners for bloom or green fruit thinning in peaches. Hortscience 2011, 46, 43–51. [Google Scholar] [CrossRef]
- Philbrownwelding. Available online: https://www.philbrownwelding.com/index.php/peach-blossom-thinner (accessed on 1 December 2022).
- Aasted, M.; Dise, R.; Baugher, T.A.; Schupp, J.R.; Heinemann, P.H.; Singh, S. Autonomous Mechanical Thinning Using Scanning LIDAR. In Proceedings of the 2011 ASABE Annual International Meeting, Louisville, KY, USA, 7–10 August 2011. [Google Scholar]
- Lyons, D.J.; Heinemann, P.H.; Schupp, J.R.; Baugher, T.A.; Liu, J. Development of a selective automated blossom thinning system for peaches. Trans. ASABE 2015, 58, 1447–1457. [Google Scholar]
- Li, J.; Xu, Y.; Xu, J.T.; Yang, Z.; Lu, H.Z. Design and experiment of control system for suspended electric flexible thinner. J. Trans. Chin. Soc. Agric. Eng. 2016, 32, 61–66. [Google Scholar]
- Li, J.; Lu, H.Z.; Yang, Z.; Zheng, S.Y. Design and experimental study of litchi flexible thinning mechanism. J. South Chin. Agric. Univ. 2013, 34, 431–435. [Google Scholar]
- Wouters, N.; De Ketelaere, B.; Deckers, T.; De Baerdemaeker, J.; Saeys, W. Multispectral detection of floral buds for automated thinning of pear. Comput. Electron. Agric. 2015, 113, 93–103. [Google Scholar] [CrossRef]
- Zhou, Y.; Pan, Y.F.; He, L.; Song, L.; Wang, Q.; Song, Z.S.; Wen, X.Y. A Tractive Blossom and Fruit Thinning Device. P. China CN113692872B, 6 January 2023. [Google Scholar]
- Yang, Z.; Ding, Y.H.; Li, J.; Xyu, X.; Duan, J.L.; Fu, H.; Jiang, Y.L.; Lin, J.Q.; Wang, B.; Liu, E.X.; et al. Orchard Cruise Blossom Thinning Device and Method. P. China CN111670715A, 30 June 2020. [Google Scholar]
- Hu, C.Q.; Sui, R.D. Blossom Thinner. P. China CN213245837U, 21 May 2021. [Google Scholar]
- Yang, Z.; Ding, Y.H.; Li, J.; Duan, J.L.; Xyu, X.; Jiang, Y.L.; Xiang, J.; Wang, T.Y.; Yyu, X.F.; Li, J.X.; et al. A litchi Profiling Blossom Mechanism. P. China CN110235641A, 1 August 2019. [Google Scholar]
- Lyu, X.L.; Lei, X.H.; Zhang, M.N.; Chang, Y.H.; Bai, Z.C.; Li, H. A Multi-Segment Arm Profiling Blossom and Fruit Thinning Device. P. China CN106857044B, 30 August 2022. [Google Scholar]
- Lei, X.H.; Lyu, X.L.; Zhang, M.N.; Ma, Z.B.; Shen, Q.Y.; Liu, W.H. An Electric Orchard Blossom Thinner. P. China CN211909757U, 13 November 2020. [Google Scholar]
- Yang, Z.; Ding, Y.H.; Liu, B.L.; Duan, J.L.; Xiong, J.T.; Li, J.; Xyu, X.; Jiang, Y.L.; Yuan, H.T.; Huang, G.S.; et al. Adaptive Blossom Thinner and Method. P. China CN113099870B, 14 June 2022. [Google Scholar]
- Lei, X.H.; Lyu, X.L.; Zhang, M.N.; Chang, Y.H. A Profiling Blossom Thinner and Method for Y Trellis Pear Orchard. P. China CN113243220B, 6 January 2023. [Google Scholar]
- Liu, P.; Gao, D.Z.; Zhu, Y.J.; Liu, L.P. A Blossom Thinning Arm Based on Image Recognition and Its Application Method. P. China CN111837701A, 30 October 2020. [Google Scholar]
- Wu, J.J.; Shang, Z.; Gong, W.J.; Wang, X.L. Electromagnetic Blossom Thinning Device for apple Tree Based on Computer Control. P. China CN209693537U, 29 November 2019. [Google Scholar]
- Liu, P.; Gao, D.Z.; Zhu, Y.J.; Liu, L.P.; Du, W.S. A Double Roller Intelligent Blossom Thinner Based on Machine Vision and Its Application Method. P. China CN111903370A, 10 November 2020. [Google Scholar]
- Chen, G.F.D. Research on Apple Flower Recognition and Detection Method Based on Deep Learning. Master’s Dissertation, Shandong Agricultural University, Tai’an, China, 2022. 80p. [Google Scholar]
- Shang, Y.Y.; Zhang, Q.R.; Song, H.B. Application of deep learning using Yolov5s to apple flower detection in natural scenes. J. Trans. Chin. Soc. Agric. Eng. 2022, 38, 222–229. [Google Scholar]
- Wang, X.; Tang, J.L.; Whitty, M. DeepPhenology: Estimation of apple flower phenology distributions based on deep learning. Comput. Electron. Agric. 2021, 185, 106123. [Google Scholar] [CrossRef]
- Tian, Y.N.; Yang, G.D.; Wang, Z.; Li, E.; Liang, Z.Z. Instance segmentation of apple flowers using the improved mask ReCNN model. Biosyst. Eng. 2020, 193, 264–278. [Google Scholar] [CrossRef]
- Farjon, G.; Krikeb, O.; Aharon, B.H.; Alchanatis, V. Detection and counting of flowers on apple trees for better chemical thinning decisions. Preci. Agric. 2020, 21, 503–521. [Google Scholar] [CrossRef]
- Wu, D.H.; Lv, S.C.; Jiang, M.; Song, H.B. Using channel pruning-based Yolov4 deep learning algorithm for the real-time and accurate detection of apple flowers in natural environments. Comput. Electron. Agric. 2020, 178, 105742. [Google Scholar] [CrossRef]
- Zhang, C.L.; Mouton, C.; Valente, J.; Kooistra, L.; van Ooteghem, R.; de Hoog, D.; van Dalfsen, P.; de Jong, P.F. Automatic flower cluster estimation in apple orchards using aerial and ground based point clouds. Biosyst. Eng. 2022, 221, 164–180. [Google Scholar] [CrossRef]
- Liu, S.X.; Sun, L.L.; Wang, Z.; Wang, R.R.; Zhang, H.J.; Wang, J.X. Fuzzy clustering accurate estimation model of apple tree flowers with complex background. J. Chin. Agric. Mech. 2017, 38, 74–81. [Google Scholar]
- Crtomir, R.; Urska, C.; Stanislav, T.; Denis, S.; Karmen, P.; Pavlovic, M.; Marjan, V. Application of neural networks and image visualization for early forecast of apple yield. Erwerbs-Obstbau. 2012, 54, 69–76. [Google Scholar] [CrossRef]
- Aggelopoulou, A.D.; Bochtis, D.; Fountas, S.; Swain, K.C.; Gemtos, T.A.; Nanos, G.D. Yield prediction in apple orchards based on image processing. Preci. Agric. 2011, 12, 448–456. [Google Scholar] [CrossRef]
- Xia, Y.; Lei, X.H.; Qi, Y.N.; Xyu, T.; Yuan, Q.C.; Pan, J.; Jiang, S.K.; Lyu, X.L. Detection of pear inflorescence based on improved Ghost-Yolov5s-BiFPN algorithm. Smart Agric. 2022, 4, 108–119. [Google Scholar]
- Zhou, G.H.; Sun, L.L.; Liang, F.F.; Zhang, X.H. Pear flower density classification based on improved density peak clustering algorithm. J. Trans. Chin. Soc. Agric. Eng. 2023, 39, 126–135. [Google Scholar]
- Lyu, S.L.; Zhao, Y.W.; Li, R.Y.; Li, Z.; Fan, R.J.; Li, Q.F. Embedded sensing system for recognizing citrus flowers using cascaded fusion Yolov4-CF + FPGA. Sensors 2022, 22, 1255. [Google Scholar] [CrossRef]
- Deng, Y.; Wu, H.R.; Zhu, H.J. Recognition and counting of citrus flowers based on instance segmentation. J. Trans. Chin. Soc. Agric. Eng. 2020, 36, 200–207. [Google Scholar]
- Du, W.S.; Wang, C.Y.; Zhu, Y.J.; Liu, L.P.; Liu, P. Fruit stem clamping points location for table grape thinning using improved mask R-CNN. J. Trans. Chin. Soc. Agric. Eng. 2022, 3, 169–177. [Google Scholar]
- Lin, J.Q.; Li, J.; Yang, Z.; Lu, H.Z.; Ding, Y.H.; Cui, H.J. Estimating litchi flower number using a multicolumn convolutional neural network based on a density map. Precis. Agric. 2022, 23, 1226–1247. [Google Scholar] [CrossRef]
- Wang, Z.L.; Underwood, J.; Walsh, K.B. Machine vision assessment of mango orchard flowering. Comput. Electron. Agric. 2018, 151, 501–511. [Google Scholar] [CrossRef]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Horton, R.; Cano, E.; Bulanon, D.; Fallahi, E. Peach flower monitoring using aerial multispectral imaging. J. Imaging 2017, 3, 2. [Google Scholar] [CrossRef]

| Brand | External Structure | Working Site | Main Performance Parameter |
|---|---|---|---|
| Infaco of Infaco Co. Ltd. in France |  |  | Weight: 2.9 kg |
| Range of extension rod: 1.5 to 1.9 m | |||
| Range of spindle rotation speed: 320 to 1900 r/min | |||
| Cinch of Cinch Co. Ltd. in the USA | 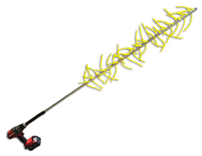 |  | Weight: 3 kg |
| Length: 2 m | |||
| Range of spindle rotation speed: 0 to 2000 r/min | |||
| Lakewoodproducts of Lakewoodproducts Co. Ltd. in New Zealand |  |  | Weight: 0.5 kg |
| Length: 0.3 m | |||
| Range of spindle rotation speed: 0 to 1500 r/min | |||
| Volpi of Volpi Co. Ltd. in Italy |  |  | Weight: 2 kg |
| Range of extension rod: 2.1 to 3.6 m | |||
| Range of spindle rotation speed: 714 to 833 r/min | |||
| Campagnolaof Campagnola Co. Ltd. in Italy |  |  | Weight: 1.9 kg |
| Range of vibratory frequency: 10 to 14 Hz |
| Name | External Structure Drawing | Main Structure and Performance |
|---|---|---|
| Hand-held kiwi fruit thinning device designed by Chinese Academy of Sciences |  | It includes a telescopic rod, upper/lower blade clip, and three-tooth silicone sleeve. On the basis of improving the efficiency of thinning, more central flowers can be retained to prevent scratching young fruit [38]. |
| Electric knapsack blossom thinning machine of China Agricultural University |  | It includes a back frame, telescopic rod mechanism, articulated mechanism, and adjustable tool head. The vertical height and spindle angle can be adjust by the operator and it has a good profiling effect [39]. |
| Hand-held pomelo blossom thinning device of Duwei Xianxi Fruit Industry Professional Cooperative in China | 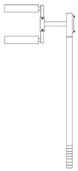 | It includes a hand-held rod, fixed rod, locking block, adjusting rod, and thinning ring. During operation, stick the thinning ring into the branch, and move it up and down with a hand pole to peel the blossom off the branch [40]. |
| Hand-held bag-shaped flower and fruit thinning device of China Agricultural University |  | It includes a power battery, handle, bag thinning device, motor, U-type frame, fixed tool holder, and cutting blade. During operation, the U-type frame encloses the inflorescence and the motor drives the cutting blade rotation for thinning [41]. |
| Hand-held citrus flower thinning machine of Country Garden Co. Ltd. in China |  | It includes a handle, power cord, battery, backpack, and movable shaft connecting rod. The rotating shaft of the device can be adjusted arbitrarily to the required operating angle [42]. |
| Electric flower and fruit thinning device of Mengxian Automation Equipment Co. Ltd. in China |  | It includes a shell, thinning sleeve, driving motor, driving wheel, and cutting knife. During operation, the reserved blossoms are placed in the thinning sleeve, and the motor is driven to rotate and drive the cutting knife to remove the excess blossom [43]. |
| Device for thinning flower, fruit and small grains fruit | 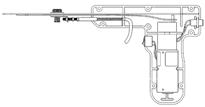 | It includes a fixed blade, moving blade, scissor amplitude regulator and eccentric wheel. During operation, press the switch with your fingers, and align the scissor with the target inflorescence [44]. |
| Hand-held citrus flower thinning machine of Yang Fengsheng citrus Professional Cooperative in China |  | It includes a fixed cylinder, telescopic rod, fixed plate, rack, limit plate, lifting block, moving block, rotating shaft, and a rotating gear. The mechanism can rotate while moving up and down to meet the needs of the working site [45]. |
| Ultrasonic target detection orchard thinning machine of South China Agricultural University |  | It includes a work frame, spindle, thinning strip group, ultrasonic sensor, motor, angle adjusting mechanism, telescopic rod, and control mechanism. During operation, the ultrasonic detector performs a start–stop action of spindle according to the presence or absence of the inflorescence target [46,47]. |
| Name | Working Site | Main Performance Parameter |
|---|---|---|
| Darwin S |  | Type: 150, 200, 230, 250, 300 |
| Weight: 87 to 101 kg | ||
| Working height: 1.475 to 2.85 m | ||
| Driving speed: 6 to 18 km/h | ||
| Range of spindle rotation speed: 150 to 450 r/min | ||
| Working efficiency: 1.5 to 2.5 ha/h | ||
| Orchard species: apple, peach | ||
| Suitable canopy type: hedge wall | ||
| Darwin PT |  | Type: 250 |
| Weight: 246 kg | ||
| Working height: 2.395 m | ||
| Driving speed: 6 to 18 km/h | ||
| Range of spindle rotation speed: 150 to 450 r/min | ||
| Range of rotation angle: 0 to 180° | ||
| Working efficiency: 1.5 to 2.5 ha/h | ||
| Orchard species: apple, peach | ||
| Suitable canopy type: hedge wall, V-type, open center | ||
| Darwin SmaArt |  | Type: 150, 200, 230, 250, 300 |
| Weight: 130 to 152 kg | ||
| Working height: 1.475 to 2.85 m | ||
| Driving speed: 6 to 18 km/h | ||
| Range of spindle rotation speed: 150 to 450 r/min | ||
| Working efficiency: 1.5 to 2.5 ha/h | ||
| Orchard species: apple, peach | ||
| Suitable canopy type: hedge wall |
| Name | Working Site | Main Performance Parameter |
|---|---|---|
| Eclairvale EH |  | Type: 1600, 2100, 2500 |
| Weight: 580 to 1095 kg | ||
| Working height: 1.6 to 2.5 m | ||
| Driving speed: 1.5 to 15 km/h | ||
| Working efficiency: 0.25 to 3 ha/h | ||
| Orchard species: peach, nectarine, apricot, plum, organic apple, almond, pistachio | ||
| Suitable canopy type: cone, goblet, hedge wall | ||
| Eclairvale FR |  | Type: 1600, 2100, 2500, 3000, 3500 |
| Weight: 540 to 1325 kg | ||
| Working height: 1.6 to 3.5 m | ||
| Driving speed: 1.5 to 15 km/h | ||
| Working efficiency: 0.25 to 3 ha/h | ||
| Orchard species: peach, nectarine, apricot, plum, organic apple, almond, pistachio | ||
| Suitable canopy type: cone, goblet, hedge wall |
| Brand | Working Site | Main Performance Parameter |
|---|---|---|
| Flexitree of Clemens Co. Ltd. |  | Weight: 155 kg |
| Dimensions: 0.46 × 2.2 × 2.45 m | ||
| Lifting height: 0.95 m | ||
| Lateral inclination: inwards 18°, outwards 26° | ||
| Orchard species: apple, peach | ||
| Suitable canopy type: trunk type, Y-trellis, hedge wall | ||
| TTBT-300 designed by Jiangsu Academy of Agricultural Sciences |  | Weight: 200 kg |
| Dimensions: 0.9 × 1.2 × 2.7 m | ||
| Arm extension range: 0–0.5 m | ||
| Spindle length: 1.1 m | ||
| Spindle rotation speed range: 0–300 r/min | ||
| Orchard species: apple, peach, pear | ||
| Suitable canopy type: trunk type, Y-trellis | ||
| Bonner designed by University of Bonn |  | Height: 3 m |
| Arm extension range: 0–0.5 m | ||
| Spindle rotation speed range: 0–500 r/min | ||
| Orchard species: apple, peach | ||
| Suitable canopy type: trunk type, Y-trellis, hedge wall |
| Name | Working Site | Main Performance Parameter |
|---|---|---|
| Double spiked-drum shaker |  | Rotating drum diameter: 2.4 m |
| Rotating drum height: 1.5 m | ||
| Layer number of nylon rods: 6 | ||
| Nylon rods number of one layer: 12 | ||
| Nylon rods line diameter: 3.2 cm | ||
| Nylon rods length: 1.1 m | ||
| Orchard species: peach | ||
| Suitable canopy type: V-type | ||
| Single spiked-drum shaker |  | Rotating drum diameter: 1.35 m |
| Rotating drum height: 1.2 m | ||
| Layer number of nylon rods: 8 | ||
| Nylon rods number of one layer: 24 | ||
| Nylon rods line diameter: 1.6 cm | ||
| Nylon rods length: 0.61 m | ||
| Adjustable tilt angle: 45° | ||
| Orchard species: peach | ||
| Suitable canopy type: V-type |
| Name | Working Site | Main Performance Parameter |
|---|---|---|
| One-rotor orchard horizontal rotary thinner of Phil Brown Welding Co. Ltd. |  | Hydraulic driven rotor with variable speed, adjustable for different tree row widths, and rubber ropes can be easily replaced when worn. Orchard species: peach Suitable canopy type: open center |
| Darwin thinner with LIDAR scanning system of Carnegie Mellon University |  | Tractor speed: 1.6 km/h Spindle rotation speed: 240 r/min Spindle lateral control time: 5 s Spindle angle control time: 4 s Orchard species: peach, apple Suitable canopy type: V-type, hedge wall |
| Visual blossom thinning system of Pennsylvania State University | 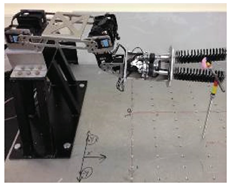 | Robotic arm precision: −1.26 cm to +1.57 cm End-effector brushes precision: –2.97 cm to +3.04 cm Orchard species: peach |
| Litchi blossom thinner profiling control system of South China Agricultural University |  | Dynamic mean errors of translational screw: 0.17 cm Dynamic mean errors of profile adjusting screw: 0.07 cm Orchard species: litchi |
| Multispectral camera system for pear inflorescence designed by Catholic University of Leuven |  | Detection precision: 87% False detection rate: <16% Orchard species: pear |
| Name | External Structure Drawing | Main Structure and Performance |
|---|---|---|
| Tractive blossom and fruit thinning device designed by Xinjiang Academy of Agricultural and Reclamation Sciences | 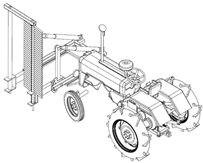 | It includes a U-type bracket, bottom mounting frame, L type connecting frame, and flower assembly. During operation, the spindle angle can be adjusted, which can adapt to the working environment of different terrains and canopies [90]. |
| Orchard cruise blossom thinning device of South China Agricultural University | 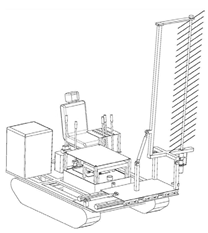 | It includes a blossom thinning mechanism, cruise mechanism, control system, and hydraulic system. When working, the distance sensor transmits the signal to the control system, and the control system controls the hydraulic system according to the target distance information, so that the hydraulic system drives the blossom thinning mechanism and the cruise mechanism [91]. |
| Blossom thinner of Qingdao Agricultural University | 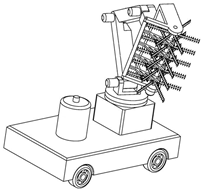 | It includes a trolley body with wheels, a supporting arm, and a flower thinning mechanism. It can ensure that the flower thinning agent can be completely sprayed on every part of the tree canopy [92]. |
| Litchi profiling blossom mechanism of South China Agricultural University | 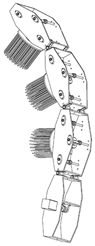 | It includes a base bracket, support bracket, spring articulated mechanism, and blossom thinning mechanism. During operation, the profiling function is realized through the coordination of a hinged structure with a torsion spring, support bracket, motor, and wire rope [93]. |
| Multi-segment arm profiling blossom and fruit thinning device designed by Jiangsu Academy of Agricultural Sciences |  | It includes a suspension frame, transmission shaft, support bracket, hydraulic cylinder, thinning arm, and brush. During operation, the thinner is hung behind the tractor, which is used in orchards of the different tree canopies [94]. |
| Electric orchard blossom thinner designed by Jiangsu Academy of Agricultural Sciences | 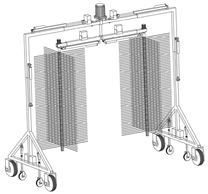 | It includes adjustable support, a thinning device, and a walking device. During operation, the height, width, and distance between the two spindles can be adjusted to avoid the damage of fruit trees in the process of flower-thinning, so that the thinner can adapt to fruit trees of different growth periods [95]. |
| Adaptive blossom thinner of South China Agricultural University | 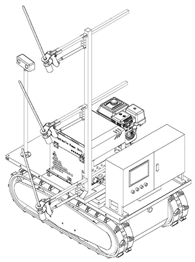 | It includes a carrier, multi-stage adaptive arm, intelligent inflorescence density identification system, adaptive control system, and hydraulic drive station. During operation, the image of fruit tree inflorescence is collected by the camera; the position and density information of blossoms are obtained by the intelligent inflorescence density recognition system, and the action of the thinning arm is controlled [96]. |
| Wide row dense planting orchard intelligent blossom thinner of Hebei Agricultural University | 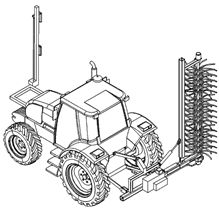 | It includes an unmanned tractor, camera, fixed bracket, and thinning device. During operation, the angle, distance, and speed of flexible brushing can be adjusted [21]. |
| Y trellis pear orchard profiling blossom thinner of Jiangsu Academy of Agricultural Sciences | 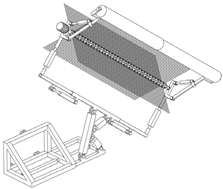 | It includes a suspension frame, holding bracket, hydraulic cylinder, thinning spindle, and distance roller. During operation, the angle and height of the telescopic thinning spindle can be adjusted to match the different sizes of the Y trellis [97]. |
| Blossom thinning arm based on image recognition of Shandong Agricultural University | 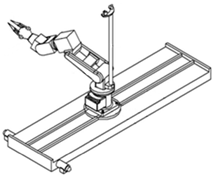 | It includes a controller, image acquisition equipment, mechanical arm, and actuator. During the operation, the image acquisition device collects the inflorescence image, the operator selects the inflorescence to be cut off, and the controller controls the mechanical arm and actuator to complete the thinning operation [98]. |
| Electromagnetic blossom thinning device for apple tree of HeXi University | 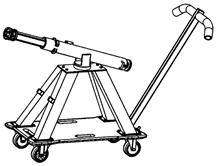 | It includes a support frame, turntable, connecting plate, tool head, telescopic rod, CCD camera, and control circuit. During the operation, the CCD camera collects the inflorescence image, the background computer obtains the three-dimensional coordinate information of the target object, and the embedded computer controls the motor to control the telescopic rod to move and locate the target object [99]. |
| Double roller intelligent blossom thinner based on machine vision of Shandong Agricultural University | 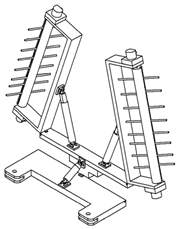 | It includes a fixed base, support platform, image acquisition device, and thinning device. During operation, the image acquisition equipment collects the height, canopy shape, position, and blossom density information of the fruit tree, and the controller determines the inclination angle and rotation speed of the roller [100]. |
| Training Model/Method | Platform | Image | Performance Index | Reference |
|---|---|---|---|---|
| Yolov5 | Software platform: Windows10, PyCharm2022, Pytorch1.7, Python 3.8. Hardware platform: Intel(R)Core(TM)i7-10700F, CPU2.9GHz, NVIDIA GeForce RTX3060. |  | Precision: 98.07% | [101] |
| Recall: 97.56% | ||||
| mAP: 94.9% | ||||
| Detection speed: 77 FPS | ||||
| Yolov5s | Software platform: Windows10, PyCharm2022, Pytorch1.6, Python 3.8. Hardware platform: Intel(R)Core(TM) i7-10700K, CPU3.80 GHz, NVIDIA GeForce RTX2080Ti. |  | Precision: 87.7% | [102] |
| Recall: 94% | ||||
| mAP: 97.2% | ||||
| Trained model size: 14.09 MB | ||||
| Detection speed: 60 FPS | ||||
| Vgg16 | Software platform: Ubuntu 18.04 LTS, Pytorch1.1. Hardware platform: Intel(R)Core(TM) i9-9900KF, CPU3.60 GHz, NVIDIA GeForce RTX2080Ti. |  | Kullback-Leibler divergence value: 0.23 | [103] |
| Mask R-CNN | Hardware platform:NVIDIA Tesla V100 server. |  | Precision: 96.43% | [104] |
| Recall: 95.37% | ||||
| F1 score: 95.90% | ||||
| mAP: 59.4% | ||||
| mIoU: 91.55% | ||||
| Vgg16 | Software platform: Matlab 2014a. |  | Precision: 68.3% | [105] |
| Recall: 70% | ||||
| Yolov4 | Software platform: Python 3.8, Microsoft Visual Studio 2015. Hardware platform: Intel(R)Core(TM) E5-1620, CPU3.50 GHz, NVIDIA GeForce RTX2080Ti. |  | mAP: 97.31% | [106] |
| Trained model size: 12.46 MB | ||||
| Detection speed: 72 FPS | ||||
| Point cloud with image colour | Unmanned aerial vehicle, RGB camera, real time kinematic positioning system | 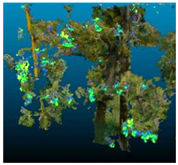 | R2: >0.65 RRMSE: <20% P-stat: <0.005 | [107] |
| Fuzzy cluster | RGB camera |  | Precision: 92% | [108] |
| Picture texture | Digital camera | 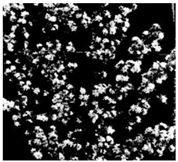 | Precision: 82% | [110] |
| Fruits | Training Model/Method | Platform | Image | Performance Index | Reference |
|---|---|---|---|---|---|
| Pear | Yolov5s | Software platform: Ubuntu 20.04, Pytorch. Hardware platform: Intel(R)Core(TM)E5V3, CPU3.10 GHz, NVIDIA GeForce RTX3090. |  | Precision: 91.3% Recall: 89.9% Trained model size: 7.62 MB Detection speed: 34 FPS | [111] |
| Pear | Yolov4 | Software platform: Pytorch. |  | Accuracy of scale prediction: 94.89% Accuracy of density classification: 94.29% | [112] |
| Citrus | Yolov4 | Software platform: Windows 10, TensorFlow 2.2.0, Keras 2.3.1. Hardware platform: Intel(R)Core(TM) i7-9700, CPU3.00 GHz, NVIDIA GeForce RTX2060. |  | mAP: 95.03% F1 score: 89.00% Trained model size: 5.96 MB Detection speed: 30 FPS | [113] |
| Citrus | Mask R-CNN | Software platform: Python3, TensorFlow, Keras. Hardware platform: NVIDIA Quadro M4000 |  | AP value: 36.3 Average error rate: 11.9% | [114] |
| Grape | Mask R-CNN | Software platform: Windows 10, Pytorch. Hardware platform: Intel(R)Core(TM) i7, NVIDIA GeForce RTX2080Ti. |  | Precision: 83.3% Location time: 0.325 s | [115] |
| Litchi | Yolov3, Yolov4, Faster-RCNN | Software platform: Ubuntu 16.04, PyTorch 1.3, Python 3.7. Hardware platform: Intel Xeon Gold 5218, CPU2.3 GHz, NVIDIA GeForce RTX2080Ti. |  | Mean absolute error: 16.29 Mean square error: 25.4 | [116] |
| Mango | Faster-RCNN | Software platform: Matlab. Hardware platform: Intel Core i7 CPU. |  | Precision: 89% Recall: 81% Accuracy: 96% F1 score: 0.85 | [117] |
| Almond | Point cloud with image colour | The ‘‘Shrimp” mobile ground vehicle robot | 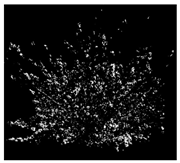 | R2 of hand-held photography and image processing: 0.71 | [118] |
| Peach | Multispectral | Unmanned aerial system with multispectral camera |  | Average detection rate: 84.3% | [119] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, X.; Yuan, Q.; Xyu, T.; Qi, Y.; Zeng, J.; Huang, K.; Sun, Y.; Herbst, A.; Lyu, X. Technologies and Equipment of Mechanized Blossom Thinning in Orchards: A Review. Agronomy 2023, 13, 2753. https://doi.org/10.3390/agronomy13112753
Lei X, Yuan Q, Xyu T, Qi Y, Zeng J, Huang K, Sun Y, Herbst A, Lyu X. Technologies and Equipment of Mechanized Blossom Thinning in Orchards: A Review. Agronomy. 2023; 13(11):2753. https://doi.org/10.3390/agronomy13112753
Chicago/Turabian StyleLei, Xiaohui, Quanchun Yuan, Tao Xyu, Yannan Qi, Jin Zeng, Kai Huang, Yuanhao Sun, Andreas Herbst, and Xiaolan Lyu. 2023. "Technologies and Equipment of Mechanized Blossom Thinning in Orchards: A Review" Agronomy 13, no. 11: 2753. https://doi.org/10.3390/agronomy13112753
APA StyleLei, X., Yuan, Q., Xyu, T., Qi, Y., Zeng, J., Huang, K., Sun, Y., Herbst, A., & Lyu, X. (2023). Technologies and Equipment of Mechanized Blossom Thinning in Orchards: A Review. Agronomy, 13(11), 2753. https://doi.org/10.3390/agronomy13112753