
Dynamic Behavior of PVC Gel Actuators: Nonlinear Effects of Viscoelasticity and Electromechanical Coupling


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Deformation Mechanism and Dynamic Model of PVC Gel Actuator
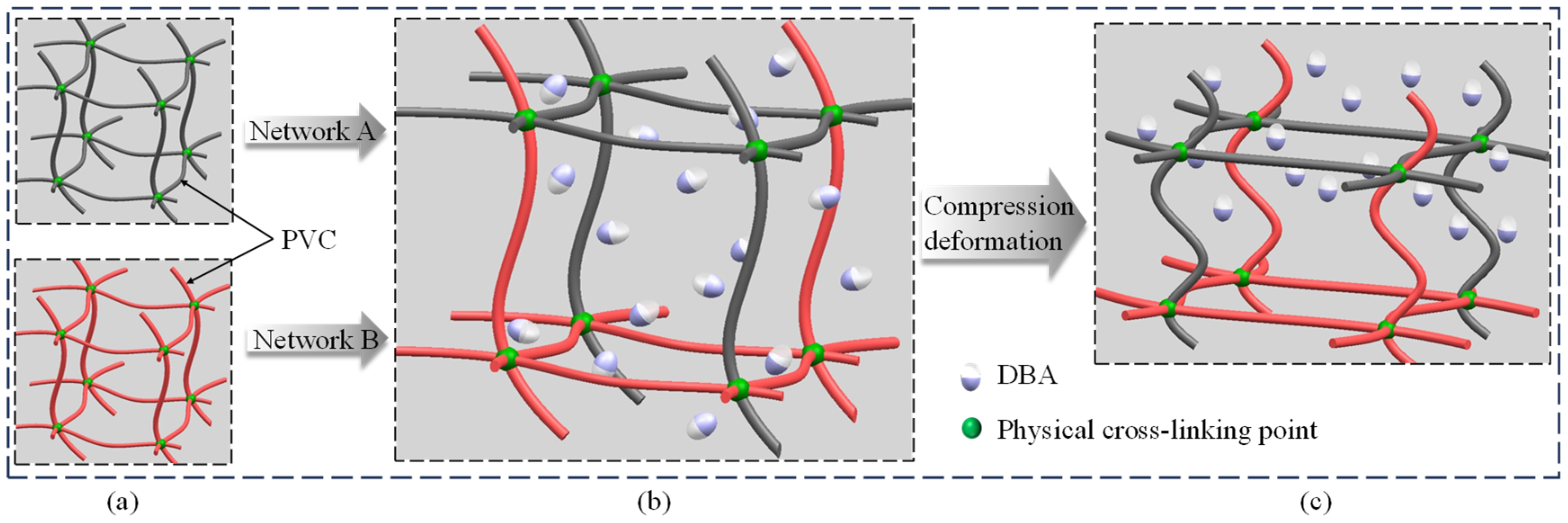
2.1. Deformation Mechanism of Viscoelastic PVC Gel
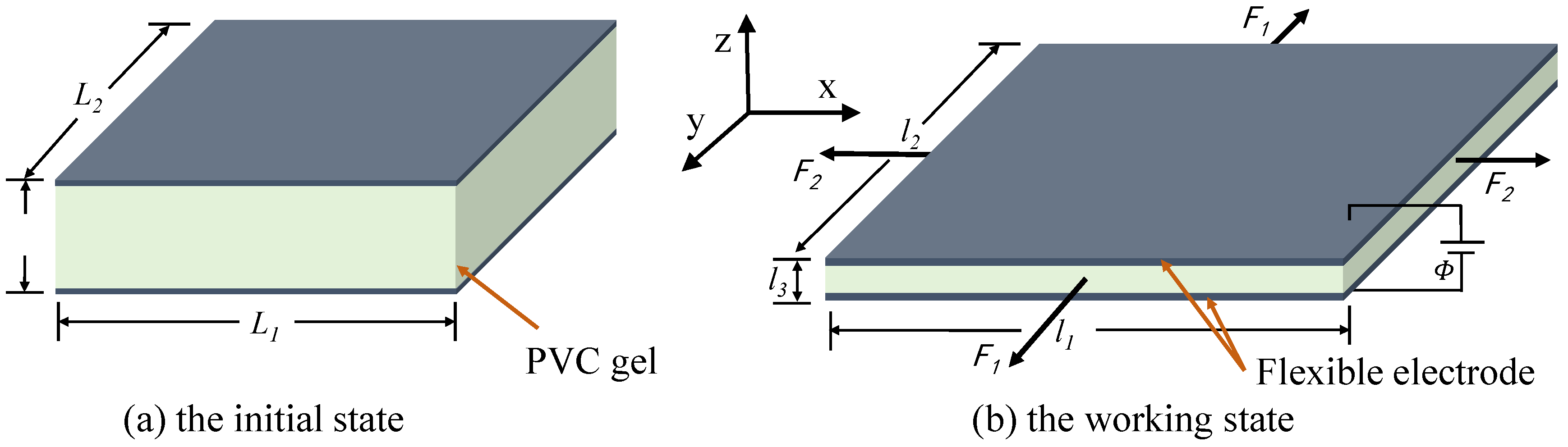
2.2. Dynamic Model of PVC Gel Actuator
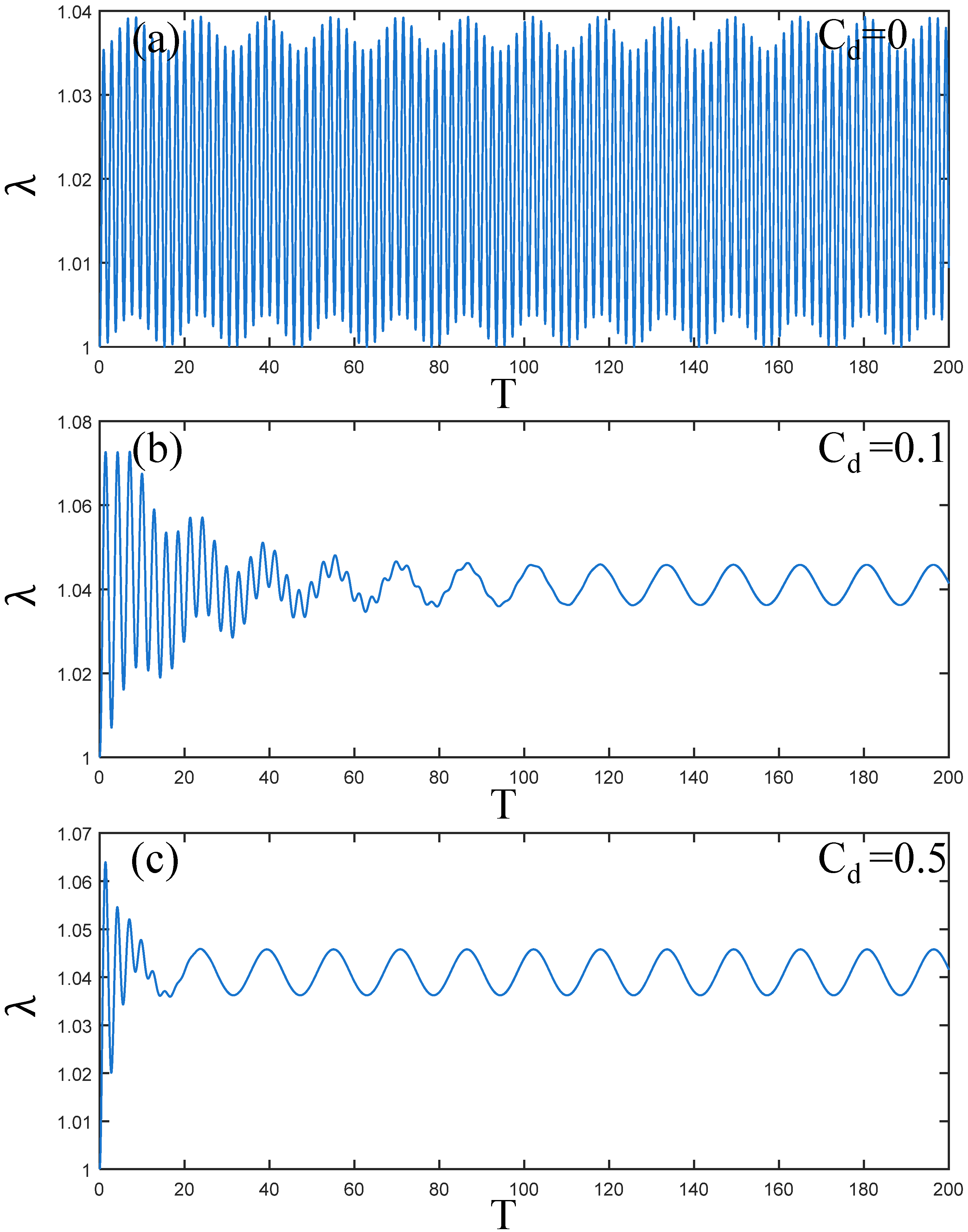
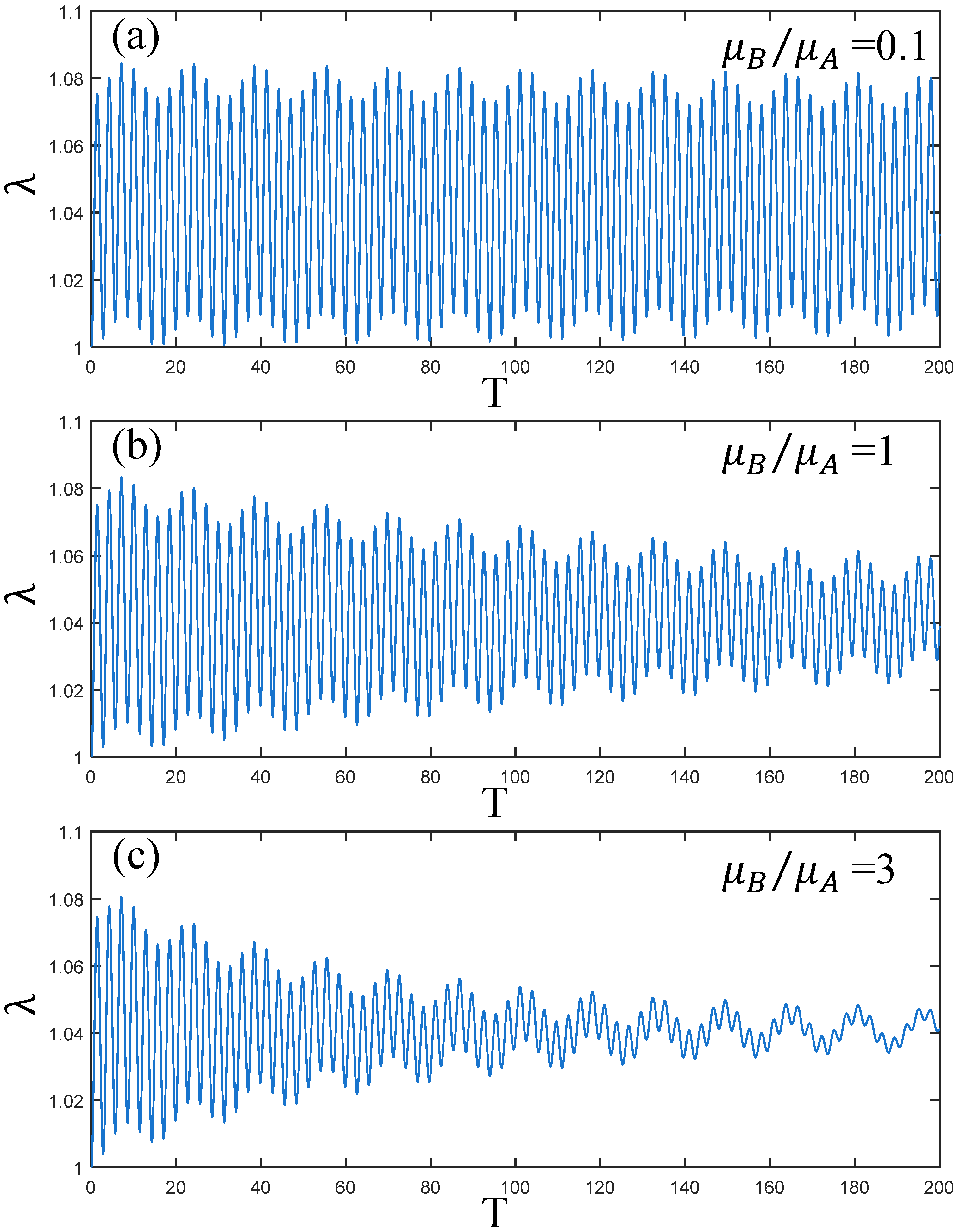
3. Dynamic Characteristics Analysis of PVC Gel Actuator Under Different Parameters
4. The Stability and Periodicity of PVC Gel Actuator Under Different Parameters
5. Resonance Analysis of PVC Gel Actuator
6. Bifurcation Characteristics and Lyapunov Exponent of PVC Gel Actuator Under Single Parameter Change
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Dong, Y.; Annapooranan, R.; Li, C.; Chambers, R.; Cai, S. PVC gel-based electro-adhesion on extremely rough surfaces. Appl. Mater. Today 2024, 38, 102189. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Tang, N.; Lei, D.; Lin, J.; Wang, Y.; Xiao, R. Modeling the Damage and Self-healing Behaviors of Plasticized PVC Gels. Acta Mech. Solida. Sin. 2021, 34, 466–476. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Y.D.; Shi, Q.; Liang, Y. Electroactive dielectric polymer gels as new-generation soft actuators: A review. J. Mater. Sci. 2021, 56, 14943–14963. [Google Scholar] [CrossRef]
- Sengalani, R.; Rasool Mohideen, S. Numerical Analysis of Robotic Manipulator Subject to Mechanical Flexibility by Lagrangian Method. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2019, 90, 503–513. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Luo, K.; Tian, Q.; Hu, H. Twisting tubes as soft robotic valves. Int. J. Mech. Sci. 2023, 260, 108655. [Google Scholar] [CrossRef]
- Neubauer, J.; Olsen, Z.J.; Frank, Z.; Hwang, T.; Kim, K.J. A study of mechanoelectrical transduction behavior in polyvinyl chloride (PVC) gel as smart sensors. Smart Mater. Struct. 2021, 31, 015010. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, Y.; Xu, M. Tunable focus poly(vinyl chloride) gel microlens Array fabricated by shaping in patterned electric field. J. Appl. Polym. Sci. 2023, 141, e54816. [Google Scholar] [CrossRef]
- Zhang, H.; He, Q.; Tian, C.; Wu, Y.; Zhao, Z.; Yu, M. PVC gel bio-inspired adhesives with variable modulus and its application in a gripper. J. Cent. South Univ. 2022, 29, 1778–1787. [Google Scholar] [CrossRef]
- Dong, C.; Shi, X.; Fan, P.; Zhu, Z. A Novel Bionic Robot Fish Using PVC Gel Actuators. Lect. Notes Electr. Eng. 2023, 1010, 791–800. [Google Scholar]
- Liu, C.; Zhang, K. A Wearable Finger Tremor-Suppression Orthosis Using the PVC Gel Linear Actuator. IEEE Robot. Autom. Lett. 2024, 9, 3854–3861. [Google Scholar] [CrossRef]
- Tian, C.; Yu, M.; Wu, Y.; Yin, G.; Hu, R.; Ge, H.; Tong, X.; Wang, G.; Li, H. Dynamic braille display based on surface-structured PVC gel. Smart Mater. Struct. 2024, 33, 035018. [Google Scholar] [CrossRef]
- Neubauer, J.; Cho, H.J.; Kim, K.J. Tunable polyvinyl chloride (PVC) and thermoplastic polyurethane (TPU)-based soft polymer gel sensors. Smart Mater. Struct. 2022, 31, 115025. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Hashimoto, M. Low-voltage planar PVC gel actuator with high performances. Sens. Actuators B Chem. 2019, 282, 482–489. [Google Scholar] [CrossRef]
- Sharif, M.A. PVC gel smart sensor for robotics sensing applications: An experimental and finite element simulation study *. Eng. Res. Express 2022, 4, 035029. [Google Scholar] [CrossRef]
- Irfan, M.; Ali, I.; Ali, A.; Ahmed, M.; Soomro, T.A.; Yang, W.; Rahman, S.; Mursal, S.N.F.; Jalalah, M.; Ghanim, A.A.J. Analysis of the Performance of a Gel Actuator Made of Plasticized Polyvinyl Chloride/Carboxylated Cellulose Nanocrystals. ACS Omega 2023, 8, 17976–17982. [Google Scholar] [CrossRef]
- Zhang, Y.; Perrin, V.; Seveyrat, L.; Lebrun, L. On a better understanding of the electromechanical coupling in electroactive polyurethane. Smart Mater. Struct. 2020, 29, 055007. [Google Scholar] [CrossRef]
- Al-Rubaiai, M.; Qi, X.; Frank, Z.; Tsuruta, R.; Gandhi, U.; Kim, K.J.; Tan, X. Nonlinear Modeling and Control of Polyvinyl Chloride (PVC) Gel Actuators. IEEE/ASME Trans. Mech. 2022, 27, 2168–2175. [Google Scholar] [CrossRef]
- Costa, L.G.; Savi, M.A. Nonlinear dynamics of a compact and multistable mechanical energy harvester. Int. J. Mech. Sci. 2024, 262, 108731. [Google Scholar] [CrossRef]
- Lei, J.; Xu, M.; Liu, T.; Xuan, Y.; Sun, H.; Wei, Z. Compressive mechanical behavior and constitutive model of polyvinyl chloride elastomer under dynamic loading. AIP Adv. 2020, 10, 075315. [Google Scholar] [CrossRef]
- Du, Z.; Luo, B.; Zhu, K. Study on deformation theory and resonance frequency of circular-plane PVC actuator. J. Phys. D Appl. Phys. 2023, 57, 065401. [Google Scholar] [CrossRef]
- Li, Y.; Feng, X.; Zhu, L.; Zhang, Z.; Guo, M.; Li, Z.; Li, Y.; Hashimoto, M. Modeling of Fiber-Constrained Planar PVC Gel Actuators. Nanomaterials 2023, 13, 1483. [Google Scholar] [CrossRef]
- Gent, A.N. A New Constitutive Relation for Rubber. Rubber Chem. Technol. 1996, 69, 59–61. [Google Scholar] [CrossRef]
- Sourani, P.; Arani, A.G.; Hashemian, M.; Niknejad, S. Nonlinear dynamic stability analysis of CNTs reinforced piezoelectric viscoelastic composite nano/micro plate under multiple physical fields resting on smart foundation. Proc. Inst. Mech. Eng. Part C 2023, 238, 4307–4342. [Google Scholar] [CrossRef]
- Arani, A.G.; Miralaei, N.; Farazin, A.; Mohammadimehr, M. An extensive review of the repair behavior of smart self-healing polymer matrix composites. J. Mater. Res. 2023, 38, 617–632. [Google Scholar] [CrossRef]
- Ask, A.; Menzel, A.; Ristinmaa, M. Electrostriction in electro-viscoelastic polymers. Mech. Mater. 2012, 50, 9–21. [Google Scholar] [CrossRef]
- Zhang, M.; Jakobsen, J.; Li, R.; Bai, S. Investigation of a Simple Viscoelastic Model for a PVC-Gel Actuator under Combined Mechanical and Electrical Loading. Materials 2023, 16, 1183. [Google Scholar] [CrossRef]
- Alhadidi, A.H.; Gibert, J.M. A new perspective on static bifurcations in the presence of viscoelasticity. Nonlinear Dyn. 2021, 103, 1345–1363. [Google Scholar] [CrossRef]
- Cohen, N.; de Botton, G. The electromechanical response of polymer networks with long-chain molecules. Math. Mech. Solids 2014, 20, 721–728. [Google Scholar] [CrossRef]
- Kosgallana, C.; Wijesinghe, S.; Senanayake, M.; Mohottalalage, S.S.; Ohl, M.; Zolnierczuk, P.; Grest, G.S.; Perahia, D. From Molecular Constraints to Macroscopic Dynamics in Associative Networks Formed by Ionizable Polymers: A Neutron Spin Echo and Molecular Dynamics Simulations Study. ACS Polym. Au 2024, 4, 149–156. [Google Scholar] [CrossRef]
- You, H.; Zheng, S.; Li, H.; Lam, K.Y. A model with contact maps at both polymer chain and network scales for tough hydrogels with chain entanglement, hidden length and unconventional network topology. Int. J. Mech. Sci. 2024, 262, 108713. [Google Scholar] [CrossRef]
- Jafari, H.; Sedaghati, R. Free and Forced Vibration Behaviors of Magnetodielectric Effect in Magnetorheological Elastomers. Vibration 2023, 6, 269–285. [Google Scholar] [CrossRef]
- Hwang, T.; Frank, Z.; Neubauer, J.; Kim, K.J. High-performance polyvinyl chloride gel artificial muscle actuator with graphene oxide and plasticizer. Sci. Rep. 2019, 9, 9658. [Google Scholar] [CrossRef] [PubMed]
- Acharya, R.; Dutta, S.D.; Patil, T.V.; Ganguly, K.; Randhawa, A.; Lim, K.-T. A Review on Electroactive Polymer–Metal Composites: Development and Applications for Tissue Regeneration. J. Funct. Biomater. 2023, 14, 523. [Google Scholar] [CrossRef]
- White, J.R. The site model theory and the standard linear solid. Rheol. Acta 1981, 20, 23–28. [Google Scholar] [CrossRef]
- Wang, D.; Liu, W.; Chen, K. Well-posedness and decay property for the Cauchy problem of the standard linear solid model with thermoelasticity of type III. Z. Angew. Math. Phys. 2023, 74, 70. [Google Scholar] [CrossRef]
- Li, Z.; Liu, C.; Sheng, M.; Wang, M.; Chen, H.; Li, B.; Xia, P. Broadening Bandwidth in a Semi-Active Vibration Absorption System Utilizing Stacked Polyvinyl Chloride Gel Actuators. Micromachines 2024, 15, 649. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Chen, Z.; Wang, Y.; Lu, H.; Luo, B. Dynamic Behavior of PVC Gel Actuators: Nonlinear Effects of Viscoelasticity and Electromechanical Coupling. Polymers 2025, 17, 633. https://doi.org/10.3390/polym17050633
Xiao Y, Chen Z, Wang Y, Lu H, Luo B. Dynamic Behavior of PVC Gel Actuators: Nonlinear Effects of Viscoelasticity and Electromechanical Coupling. Polymers. 2025; 17(5):633. https://doi.org/10.3390/polym17050633
Chicago/Turabian StyleXiao, Yang, Zhigang Chen, Ye Wang, Hanjing Lu, and Bin Luo. 2025. "Dynamic Behavior of PVC Gel Actuators: Nonlinear Effects of Viscoelasticity and Electromechanical Coupling" Polymers 17, no. 5: 633. https://doi.org/10.3390/polym17050633
APA StyleXiao, Y., Chen, Z., Wang, Y., Lu, H., & Luo, B. (2025). Dynamic Behavior of PVC Gel Actuators: Nonlinear Effects of Viscoelasticity and Electromechanical Coupling. Polymers, 17(5), 633. https://doi.org/10.3390/polym17050633