Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning


Abstract
1. Introduction
2. System Design and Implementation
3. Performance Evaluation
3.1. Station Deployment
3.2. Noise-Level Analysis
3.3. Collocated Recording Comparison
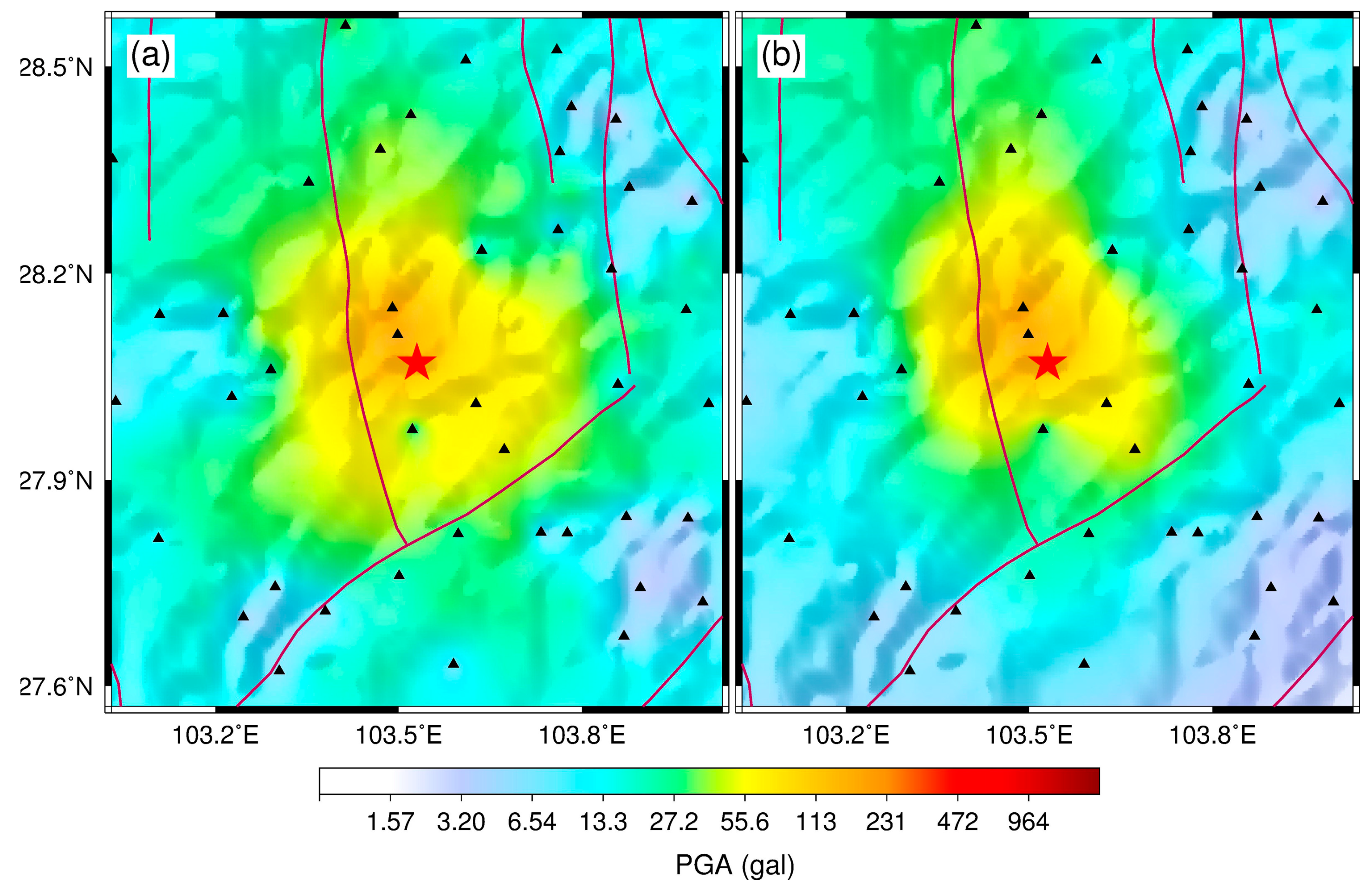
3.4. Shake Map Generation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M | Epicenter Distance (km) | Strong-motion Station Code | Comp. | PGA (cm/s2) | GL-P2B Station Code | PGA (cm/s2) | δPGArel (%) |
|---|---|---|---|---|---|---|---|
| 5.1 | 16.6 | 51XCH | UD | 85.27 | W0107 | 80.95 | 5.07 |
| EW | 199.08 | 195.66 | 1.72 | ||||
| NS | 81.23 | 79.16 | 2.55 | ||||
| 24.0 | 51XCN | UD | 31.04 | W0105 | 31.01 | 0.10 | |
| EW | 40.68 | 40.60 | 0.20 | ||||
| NS | 56.80 | 53.30 | 6.16 | ||||
| 27.6 | 51XCX | UD | 8.02 | W0111 | 8.00 | 0.27 | |
| EW | 18.90 | 20.44 | −8.11 | ||||
| NS | 18.84 | 19.44 | −3.15 | ||||
| 33.2 | 51PGW | UD | 9.53 | W2810 | 9.45 | 0.83 | |
| EW | 20.21 | 20.86 | −3.25 | ||||
| NS | 25.66 | 25.94 | −1.10 | ||||
| 40.3 | 51XCL | UD | 13.39 | W0109 | 12.73 | 4.96 | |
| EW | 27.73 | 26.64 | 3.94 | ||||
| NS | 50.07 | 51.09 | −2.04 | ||||
| 46.1 | 51PGQ | UD | 8.70 | W2809 | 7.32 | 15.85 | |
| EW | 32.55 | 31.62 | 2.86 | ||||
| NS | 27.05 | 27.02 | 0.09 | ||||
| 56.5 | 51MNZ | UD | 8.04 | W3310 | 10.06 | −25.04 | |
| EW | 28.07 | 29.12 | −3.74 | ||||
| NS | 18.33 | 17.85 | 2.62 | ||||
| 57.1 | 51MNM | UD | 16.95 | W3307 | 16.11 | 4.97 | |
| EW | 37.25 | 36.90 | 0.94 | ||||
| NS | 38.76 | 38.71 | 0.13 | ||||
| 75.6 | 51XDG | UD | 1.20 | W3203 | 1.77 | −47.87 | |
| EW | 5.38 | 5.33 | 1.08 | ||||
| NS | 3.15 | 3.24 | −2.92 | ||||
| 76.5 | 51XDM | UD | 4.75 | W3207 | 5.45 | −14.80 | |
| EW | 11.94 | 11.38 | 4.67 | ||||
| NS | 9.78 | 9.79 | −0.07 | ||||
| 78.7 | 51MNS | UD | 5.09 | W3305 | 4.94 | 3.05 | |
| EW | 19.60 | 19.49 | 0.53 | ||||
| NS | 11.12 | 11.35 | −2.07 | ||||
| 81.5 | 51MNF | UD | 7.23 | W3303 | 7.25 | −0.26 | |
| EW | 13.48 | 14.00 | −3.88 | ||||
| NS | 12.31 | 12.09 | 1.76 | ||||
| 84.6 | 51MNH | UD | 10.14 | W3306 | 9.75 | 3.88 | |
| EW | 15.80 | 15.29 | 3.21 | ||||
| NS | 13.00 | 12.54 | 3.53 | ||||
| 95.4 | 51MNJ | UD | 4.65 | W3302 | 4.48 | 3.66 | |
| EW | 7.11 | 6.94 | 2.39 | ||||
| NS | 6.94 | 6.65 | 4.18 | ||||
| 105.7 | 51MNA | UD | 5.03 | W3311 | 5.15 | −2.39 | |
| EW | 14.62 | 14.83 | −1.40 | ||||
| NS | 12.68 | 12.96 | −2.22 | ||||
| 106.3 | 51MNC | UD | 3.09 | W3301 | 3.16 | −2.26 | |
| EW | 7.57 | 7.52 | 0.71 | ||||
| NS | 7.92 | 7.76 | 1.98 | ||||
| 106.8 | 51YXZ | UD | 1.85 | W3408 | 1.83 | 0.95 | |
| EW | 8.11 | 8.01 | 1.26 | ||||
| NS | 5.50 | 6.61 | −20.22 | ||||
| 107.0 | 51MND | UD | 1.72 | W3312 | 1.81 | −5.15 | |
| EW | 5.04 | 4.46 | 11.47 | ||||
| NS | 5.63 | 5.54 | 1.50 | ||||
| 120.1 | 51YXX | UD | 2.17 | W3406 | 2.33 | −7.08 | |
| EW | 3.37 | 3.43 | −1.95 | ||||
| NS | 4.58 | 4.89 | −6.70 | ||||
| 124.8 | 51MNW | UD | 2.80 | W3308 | 2.10 | 25.21 | |
| EW | 3.69 | 3.73 | −1.01 | ||||
| NS | 4.88 | 4.91 | −0.61 | ||||
| 146.3 | 51SML | UD | 2.39 | T2403 | 2.48 | −3.86 | |
| EW | 7.33 | 7.21 | 1.63 | ||||
| NS | 7.80 | 7.48 | 4.19 | ||||
| 161.3 | 51SMC | UD | 1.39 | T2401 | 1.59 | −14.39 | |
| EW | 3.47 | 3.31 | 4.61 | ||||
| NS | 3.49 | 3.30 | 5.44 | ||||
| 176.4 | 51SMX | UD | 1.23 | T2405 | 1.44 | −16.82 | |
| EW | 2.15 | 2.18 | −1.40 | ||||
| NS | 1.95 | 1.87 | 4.26 | ||||
| 4.3 | 8.7 | 51SMC | UD | 52.49 | T2401 | 62.01 | −18.14 |
| EW | 165.16 | 157.71 | 4.51 | ||||
| NS | 197.69 | 189.23 | 4.28 | ||||
| 10.8 | 51SMX | UD | 45.22 | T2405 | 38.32 | 15.26 | |
| EW | 83.60 | 80.17 | 4.10 | ||||
| NS | 70.06 | 72.57 | −3.57 | ||||
| 28.5 | 51SMK | UD | 4.91 | T2402 | 4.51 | 8.09 | |
| EW | 8.43 | 8.09 | 4.07 | ||||
| NS | 4.91 | 4.80 | 2.17 | ||||
| 41.3 | 51MNW | UD | 6.89 | W3308 | 8.32 | −20.86 | |
| EW | 11.35 | 11.93 | −5.08 | ||||
| NS | 16.27 | 16.03 | 1.51 | ||||
| 49.9 | 51HYJ | UD | 5.84 | T2301 | 5.76 | 1.39 | |
| EW | 5.10 | 4.63 | 9.32 | ||||
| NS | 5.18 | 4.89 | 5.48 | ||||
| 59.0 | 51YXX | UD | 9.28 | W3406 | 9.96 | −7.34 | |
| EW | 21.07 | 21.45 | −1.83 | ||||
| NS | 35.28 | 33.82 | 4.13 | ||||
| 59.5 | 51MNC | UD | 4.13 | W3301 | 4.80 | −16.16 | |
| EW | 6.45 | 6.41 | 0.66 | ||||
| NS | 6.39 | 6.18 | 3.26 | ||||
| 61.2 | 51MNA | UD | 3.42 | W3311 | 3.40 | 0.60 | |
| EW | 5.34 | 5.94 | −11.20 | ||||
| NS | 6.70 | 6.98 | −4.30 | ||||
| 87.1 | 51MNS | UD | 2.12 | W3305 | 2.17 | −2.33 | |
| EW | 3.32 | 3.37 | −1.74 | ||||
| NS | 2.75 | 2.81 | −2.12 |
References
- Böse, M.; Heaton, T.H.; Hauksson, E. Real-time finite fault rupture detector (FinDer) for large earthquakes. Geophys. J. Int. 2012, 191, 803–812. [Google Scholar] [CrossRef]
- Böse, M.; Smith, D.E.; Felizardo, C.; Meier, M.-A.; Heaton, T.H.; Clinton, J.F. FinDer v.2: Improved real-time ground-motion predictions for M2–M9 with seismic finite-source characterization. Geophys. J. Int. 2018, 212, 725–742. [Google Scholar] [CrossRef]
- Cuéllar, A.; Suárez, G.; Espinosa-Aranda, J.M. Performance evaluation of the earthquake detection and classification algorithm 2(tS–tP) of the Seismic Alert System of Mexico (SASMEX). Bull. Seismol. Soc. Am. 2017, 107, 1451–1463. [Google Scholar] [CrossRef]
- Kuyuk, H.S.; Allen, R.M. A global approach to provide magnitude estimates for earthquake early warning alerts. Geophys. Res. Lett. 2013, 40, 6239–6333. [Google Scholar] [CrossRef]
- Peng, C.Y.; Yang, J.S.; Zheng, Y.; Zhu, X.Y.; Xu, Z.Q.; Chen, Y. New τc regression relationship derived from all P wave time windows for rapid magnitude estimation. Geophys. Res. Lett. 2017, 44, 1724–1731. [Google Scholar]
- Wu, Y.M.; Kanamori, H.; Allen, R.M.; Hauksson, E. Determination of earthquake early warning parameters, τc and Pd, for southern California. Geophys. J. Int. 2007, 170, 711–717. [Google Scholar] [CrossRef]
- Yamada, M.; Heaton, T.H.; Beck, J. Real-time estimation of fault rupture extent using near-source versus far-source classification. Bull. Seismol. Soc. Am. 2007, 97, 1890–1910. [Google Scholar] [CrossRef]
- Zollo, A.; Amoroso, O.; Lancieri, M.; Wu, Y.M.; Kanamori, H. A threshold-based earthquake early warning using dense accelerometer networks. Geophys. J. Int. 2010, 183, 963–974. [Google Scholar] [CrossRef]
- Chen, D.Y.; Wu, Y.M.; Chin, T.L. An empirical evolutionary magnitude estimation for early warning of earthquakes. J. Asian Earth Sci. 2017, 135, 190–197. [Google Scholar] [CrossRef]
- Cuéllar, A.; Espinosa-Aranda, J.M.; Suárez, R.; Ibarrola, G.; Uribe, A.; Rodríguez, F.H.; Islas, R.; Rodríguez, G.M.; García, A.; Frontana, B. The Mexican Seismic Alert System (SASMEX): Its alert signals, broadcast results and performance during the M 7.4 Punta Maldonado earthquake of March 20th, 2012. In Early Warning for Geological Disasters; Wenzel, F., Zschau, J., Eds.; Springer: Berlin, Germany, 2014; pp. 71–87. [Google Scholar]
- Fujinawa, Y.; Noda, Y. Japan’s earthquake early warning system on 11 March 2011: performance, shortcomings, and changes. Earthq. Spectra 2013, 29, S341–S368. [Google Scholar] [CrossRef]
- Kodera, Y.; Saitou, J.; Hayashimoto, N.; Adachi, S.; Morimoto, M.; Nishimae, Y.; Hoshiba, M. Earthquake early warning for the 2016 Kumamoto earthquake: Performance evaluation of the current system and the next-generation methods of the Japan Meteorological Agency. Earth Planets Space 2016, 68, 202. [Google Scholar] [CrossRef]
- Chen, D.Y.; Hsiao, N.C.; Wu, Y.M. The earthworm based earthquake alarm reporting system in Taiwan. Bull. Seismol. Soc. Am. 2015, 105, 568–579. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Lin, P.Y.; Wang, H.H.; Chiang, H.W.; Chang, Y.W.; Kuo, C.H.; Lin, C.M.; Wen, K.L. Comparing the performance of the NEEWS earthquake early warning system against the CWB system during the 6 February 2018 MW 6.2 Hualien earthquake. Geophys. Res. Lett. 2018, 45, 6001–6007. [Google Scholar]
- Wu, Y.M.; Liang, W.T.; Mittal, H.; Chao, W.A.; Lin, C.H.; Huang, B.S.; Lin, C.M. Performance of a low-cost earthquake early warning system (P-alert) during the 2016 ML 6.4 Meinong (Taiwan) earthquake. Seismol. Res. Lett. 2016, 87, 1050–1059. [Google Scholar] [CrossRef]
- Wu, Y.M.; Mittal, H.; Huang, T.C.; Yang, B.M.; Jan, J.C.; Chen, S.K. Performance of a low-cost earthquake early warning system (P-alert) and shake map production during the 2018 MW 6.4 Hualien, Taiwan, earthquake. Seismol. Res. Lett. 2019, 90, 19–29. [Google Scholar] [CrossRef]
- Satriano, C.; Elia, L.; Martino, C.; Lancieri, M.; Zollo, A.; Iannaccone, G. PRESTo, the earthquake early warning system for Southern Italy: Concepts, capabilities and future perspectives. Soil Dyn. Earthq. Eng. 2011, 31, 137–153. [Google Scholar] [CrossRef]
- Festa, G.; Picozzi, M.; Caruso, A.; Colombelli, S.; Cattaneo, M.; Chiaraluce, L.; Elia, L.; Martino, C.; Marzorati, S.; Supino, M.; et al. Performance of earthquake early warning systems during the 2016–2017 MW 5–6.5 central Italy sequence. Seismol. Res. Lett. 2018, 89, 1–12. [Google Scholar] [CrossRef]
- Chung, A.I.; Henson, I.; Allen, R.M. Optimizing earthquake early warning performance: ElarmS-3. Seismol. Res. Lett. 2019, 90, 727–743. [Google Scholar] [CrossRef]
- Cochran, E.S.; Kohler, M.D.; Given, D.D.; Guiwits, S.; Andrews, J.; Meier, M.A.; Ahmad, M.; Henson, I.; Hartog, R.; Smith, D. Earthquake early warning ShakeAlert system: Testing and certification platform. Seismol. Res. Lett. 2018, 89, 108–117. [Google Scholar] [CrossRef]
- Peng, H.S.; Wu, Z.L.; Wu, Y.M.; Yu, S.M.; Zhang, D.N.; Huang, W.H. Developing a prototype earthquake early warning system in the Beijing capital region. Seismol. Res. Lett. 2011, 83, 394–403. [Google Scholar] [CrossRef]
- Zhang, H.C.; Jin, X.; Wei, Y.X.; Li, J.; Kang, L.C.; Wang, S.C.; Huang, L.Z.; Yu, P.Q. An earthquake early warning system in Fujian, China. Bull. Seismol. Soc. Am. 2016, 106, 755–765. [Google Scholar] [CrossRef]
- Sheen, D.H.; Park, J.H.; Chi, H.C.; Hwang, E.H.; Lim, I.S.; Seong, Y.J.; Park, J. The first stage of an earthquake early warning system in South Korea. Seismol. Res. Lett. 2017, 88, 1491–1498. [Google Scholar] [CrossRef]
- Carranza, M.; Buforn, E.; Zollo, A. Performance of a network-based earthquake early warning system in the Ibero-Maghrebian region. Seismol. Res. Lett. 2017, 88, 1499–1507. [Google Scholar] [CrossRef]
- Hsiao, N.C.; Wu, Y.M.; Shin, T.C.; Zhao, L.; Teng, T.L. Development of earthquake early warning system in Taiwan. Geophys. Res. Lett. 2009, 36, L00B02. [Google Scholar] [CrossRef]
- Holland, A. Earthquake data recorded by the MEMS accelerometer. Seismol. Res. Lett. 2003, 74, 20–26. [Google Scholar] [CrossRef]
- Lawrence, J.F.; Cochran, E.S.; Chung, A.; Kaiser, A.; Christensen, C.M.; Allen, R.M.; Baker, J.W.; Fry, B.; Heaton, T.H.; Kilb, D. Rapid earthquake characterization using MEMS accelerometers and volunteer hosts following the M 7.2 Darfield, New Zealand, earthquake. Bull. Seismol. Soc. Am. 2014, 104, 184–192. [Google Scholar] [CrossRef][Green Version]
- Fleming, K.; Picozzi, M.; Milkereit, C.; Kühnlenz, F.; Lichtblau, B.; Fischer, J.; Zulfikar, C.; Özel, O.; the SAFER and EDIM working groups. The self-organizing seismic early warning information network (SOSEWIN). Seismol. Res. Lett. 2009, 80, 755–771. [Google Scholar] [CrossRef]
- Wu, Y.M.; Chen, D.Y.; Lin, T.L.; Hsieh, C.Y.; Chin, T.L.; Chang, W.Y.; Li, W.S.; Ker, S.H. A high-density seismic network for earthquake early warning in Taiwan based on low cost sensors. Seismol. Res. Lett. 2013, 84, 1048–1054. [Google Scholar] [CrossRef]
- Peng, C.Y.; Zhu, X.Y.; Yang, J.S.; Xue, B.; Chen, Y. Development of an integrated onsite earthquake early warning system and test deployment in Zhaotong, China. Comput. Geosci. 2013, 56, 170–177. [Google Scholar] [CrossRef]
- Fu, J.H.; Li, Z.T.; Meng, H.; Wang, J.J.; Shan, X.J. Performance evaluation of low-cost seismic sensors for dense earthquake early warning: 2018–2019 field testing in southwest China. Sensors 2019, 19, 1999. [Google Scholar] [CrossRef]
- Instrumentation Guidelines for the Advanced National Seismic System. Available online: https://pubs.usgs.gov/of/2008/1262/pdf/OF08-1262_508.pdf (accessed on 29 October 2019).
- Evans, J.R.; Allen, R.M.; Chung, A.I.; Cochran, E.S.; Guy, R.; Hellweg, M.; Lawrence, J.F. Performances of several low-cost accelerometers. Seismol. Res. Lett. 2014, 85, 147–158. [Google Scholar] [CrossRef]
- Ringler, A.; Evans, J.R.; Hutt, C.R. Self-noise models of five commercial strong-motion accelerometers. Seismol. Res. Lett. 2015, 86, 1143–1147. [Google Scholar] [CrossRef]
- Peng, C.Y.; Chen, Y.; Chen, Q.S.; Yang, J.S.; Wang, H.T.; Zhu, X.Y.; Xu, Z.Q.; Zheng, Y. A new type of tri-axial accelerometers with high dynamic range MEMS for earthquake early warning. Comput. Geosci. 2017, 100, 179–187. [Google Scholar] [CrossRef]
- MSV6000 Variable Capacitance Accelerometers. Available online: http://www.mtmems.com/en/product_view.asp?id=84 (accessed on 3 September 2019).
- ADS1281. Available online: http://www.ti.com/lit/ds/symlink/ads1281.pdf (accessed on 3 September 2019).
- SAMA5D3 Series. Available online: https://datasheetspdf.com/pdf-file/830323/Atmel/SAMA5D36/1 (accessed on 3 September 2019).
- Deng, Q.D.; Zhang, P.Z.; Ran, Y.K.; Yang, X.P.; Min, W.; Chu, Q.Z. Basic characteristics of active tectonics of China. Sci. China Ser. D 2003, 46, 356–372. [Google Scholar]
- McNamara, D.E. Ambient noise levels in the continental United States. Bull. Seismol. Soc. Am. 2004, 94, 1517–1527. [Google Scholar] [CrossRef]
- Yu, Y.X.; Wang, S.Y. Attenuation relations for horizontal peak ground acceleration and response spectrum in Eastern and Western China. Technol. Earthq. Disaster Prev. 2006, 1, 206–217. [Google Scholar]
- Distribution and Explanation of the Intensity of the October 31 2018 M5.1 Xichang, Sichuan Earthquake. Available online: http://www.scdzj.gov.cn/xwzx/fzjzyw/201811/t20181102_49990.html (accessed on 25 October 2019).








| Grade | UD RMS Values (cm/s2) | EW RMS Values (cm/s2) | NS RMS Values (cm/s2) |
|---|---|---|---|
| grade-1 | <0.023 | <0.019 | <0.019 |
| grade-2 | 0.023–0.030 | 0.019–0.026 | 0.019–0.026 |
| grade-3 | >0.030 | >0.026 | >0.026 |
| No. | Grade | Station Code | Time: 1 January 2018, at 1 am RMS Values (cm/s2) | Time: 30 December 2018, at 1 am RMS Values (cm/s2) | ||||
|---|---|---|---|---|---|---|---|---|
| UD | EW | NS | UD | EW | NS | |||
| 1 | grade-1 | SC/W0113 | 0.0193 | 0.0165 | 0.0179 | 0.0192 | 0.0167 | 0.0180 |
| 2 | grade-1 | YN/C2515 | 0.0210 | 0.0157 | 0.0176 | 0.0211 | 0.0157 | 0.0177 |
| 3 | grade-2 | YN/C2105 | 0.0261 | 0.0194 | 0.0200 | 0.0271 | 0.0219 | 0.0211 |
| 4 | grade-2 | SC/W3702 | 0.0261 | 0.0199 | 0.0200 | 0.0255 | 0.0201 | 0.0198 |
| 5 | grade-3 | SC/W3701 | 0.0366 | 0.0277 | 0.0259 | 0.0330 | 0.0259 | 0.0258 |
| 6 | grade-3 | SC/W0105 | 0.0361 | 0.0296 | 0.0278 | 0.0388 | 0.0307 | 0.0293 |
| Grade | Component | RMS Values (cm/s2) | DR/dB | NU/bits |
|---|---|---|---|---|
| grade-1 | UD | 0.0193–0.0229 | 95.63–97.12 | 15.9–16.1 |
| EW | 0.0157–0.0189 | 97.30–98.91 | 16.2–16.4 | |
| NS | 0.0160–0.0188 | 97.34–98.74 | 16.2–16.4 | |
| grade-2 | UD | 0.0230–0.0300 | 93.28–95.59 | 15.5–15.9 |
| EW | 0.0190–0.0260 | 94.53–97.25 | 15.7–16.2 | |
| NS | 0.0191–0.0259 | 94.56–97.21 | 15.7–16.1 | |
| grade-3 | UD | 0.0303–0.0388 | 91.05–93.20 | 15.1–15.5 |
| EW | 0.0262–0.0297 | 93.37–94.46 | 15.5–15.7 | |
| NS | 0.0261–0.0279 | 93.92–94.49 | 15.6–15.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.; Jiang, P.; Chen, Q.; Ma, Q.; Yang, J. Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning. Micromachines 2019, 10, 735. https://doi.org/10.3390/mi10110735
Peng C, Jiang P, Chen Q, Ma Q, Yang J. Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning. Micromachines. 2019; 10(11):735. https://doi.org/10.3390/mi10110735
Chicago/Turabian StylePeng, Chaoyong, Peng Jiang, Quansheng Chen, Qiang Ma, and Jiansi Yang. 2019. "Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning" Micromachines 10, no. 11: 735. https://doi.org/10.3390/mi10110735
APA StylePeng, C., Jiang, P., Chen, Q., Ma, Q., & Yang, J. (2019). Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning. Micromachines, 10(11), 735. https://doi.org/10.3390/mi10110735