


An Analysis of Satellite Multichannel Differential Code Bias for BeiDou SPP and PPP




Abstract
:1. Introduction
2. BDS Satellite DCB and OSB Parameters
3. BDS DCB Positioning Correction Model
3.1. BDS Pseudo-Range Observation Equation
3.2. DCB Correction Based on the BDS Broadcast Satellite Clock
3.3. DCB Correction Based on the Precise Satellite Clock of the BDS
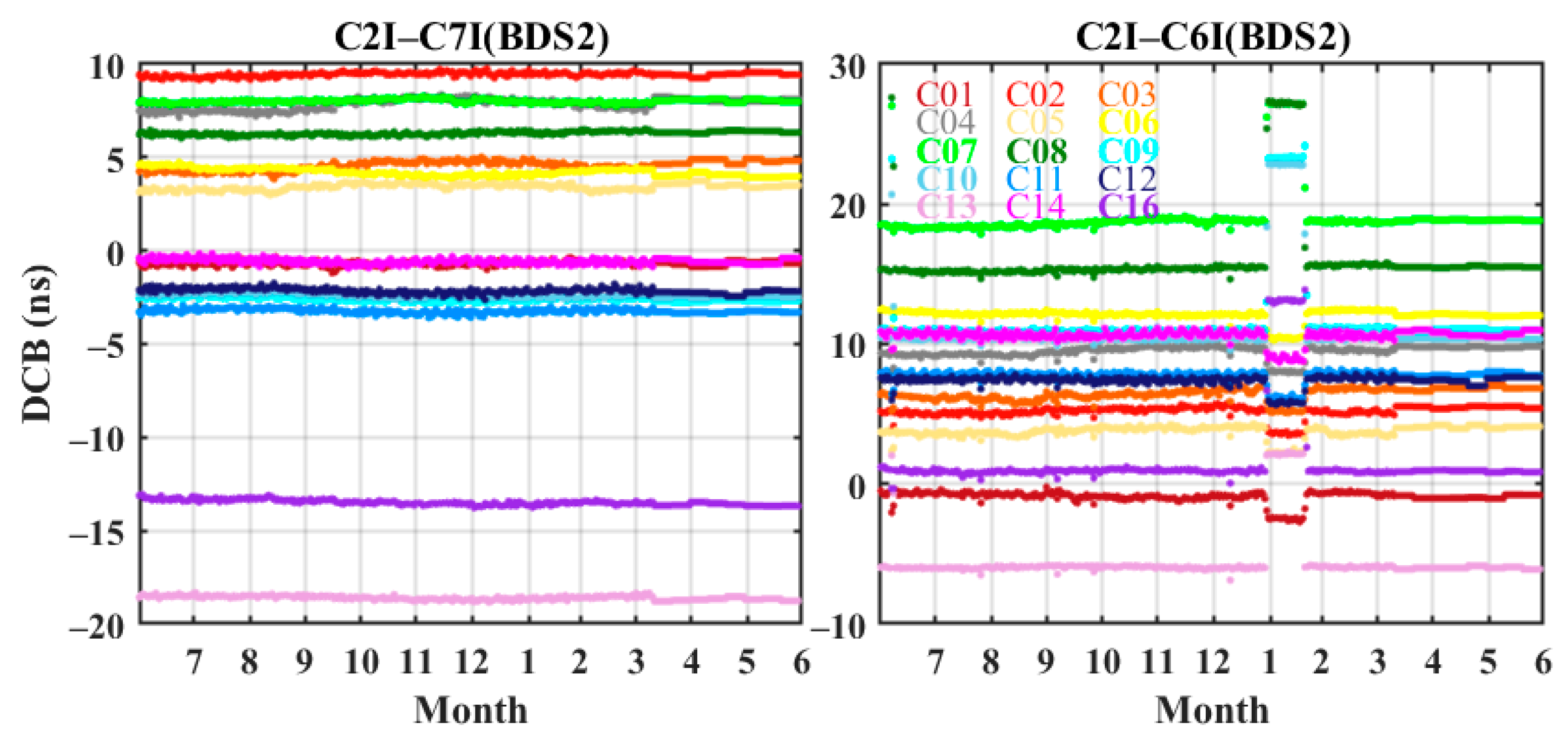
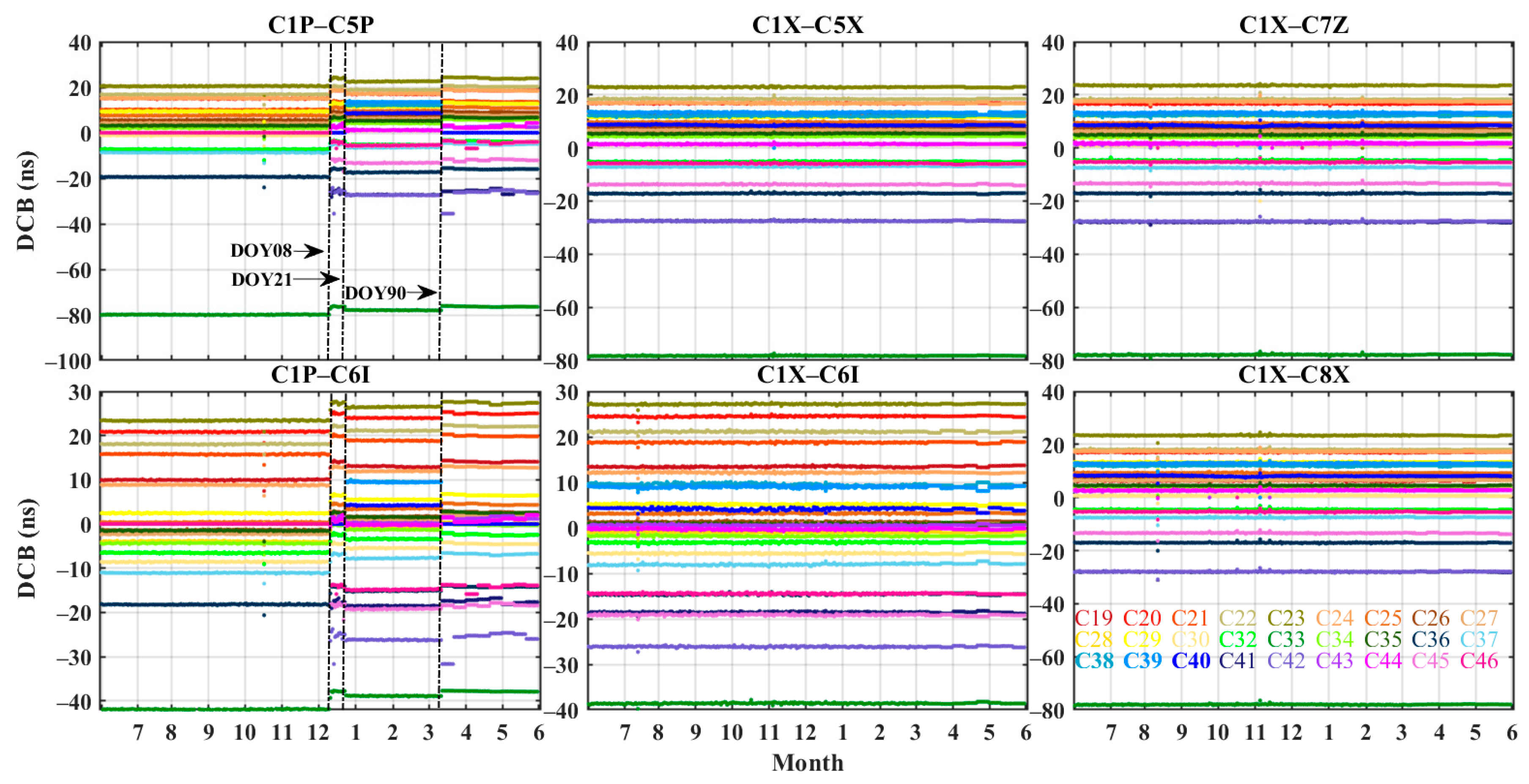
4. Time-Varying Characteristics of DCB and OSB on BDS Satellites
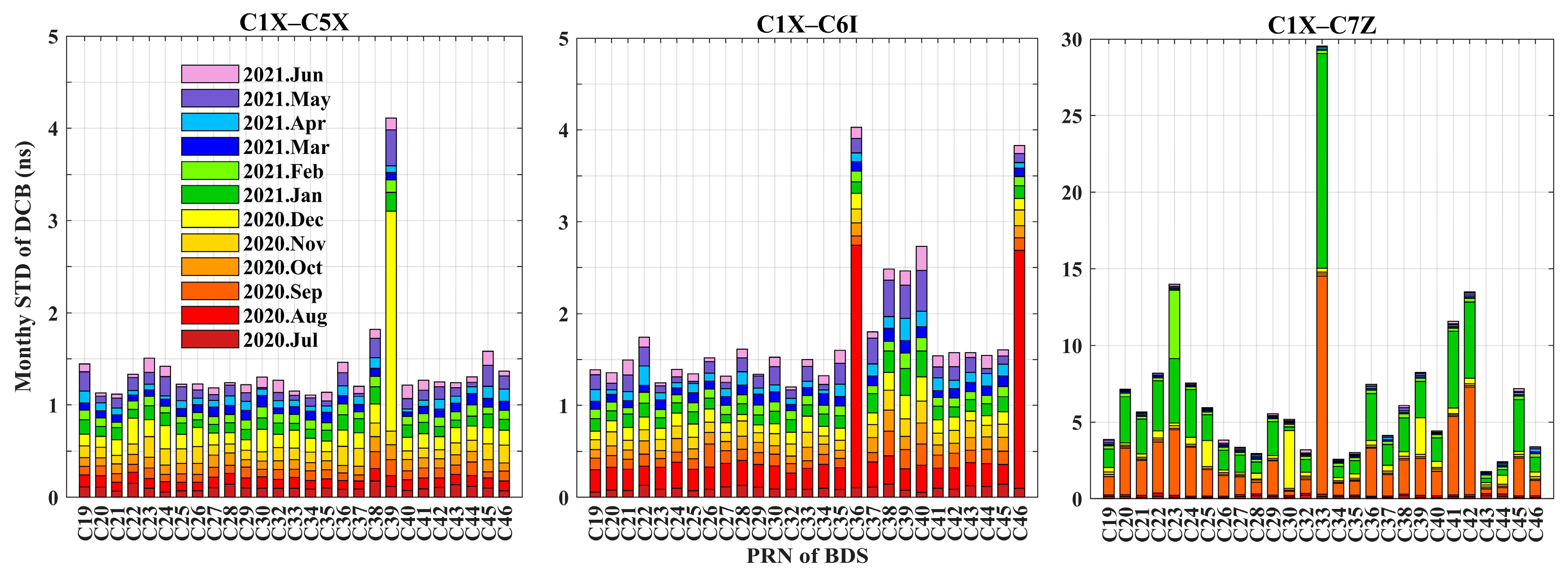
4.1. Stability of DCB and OSB Obtained from the CAS
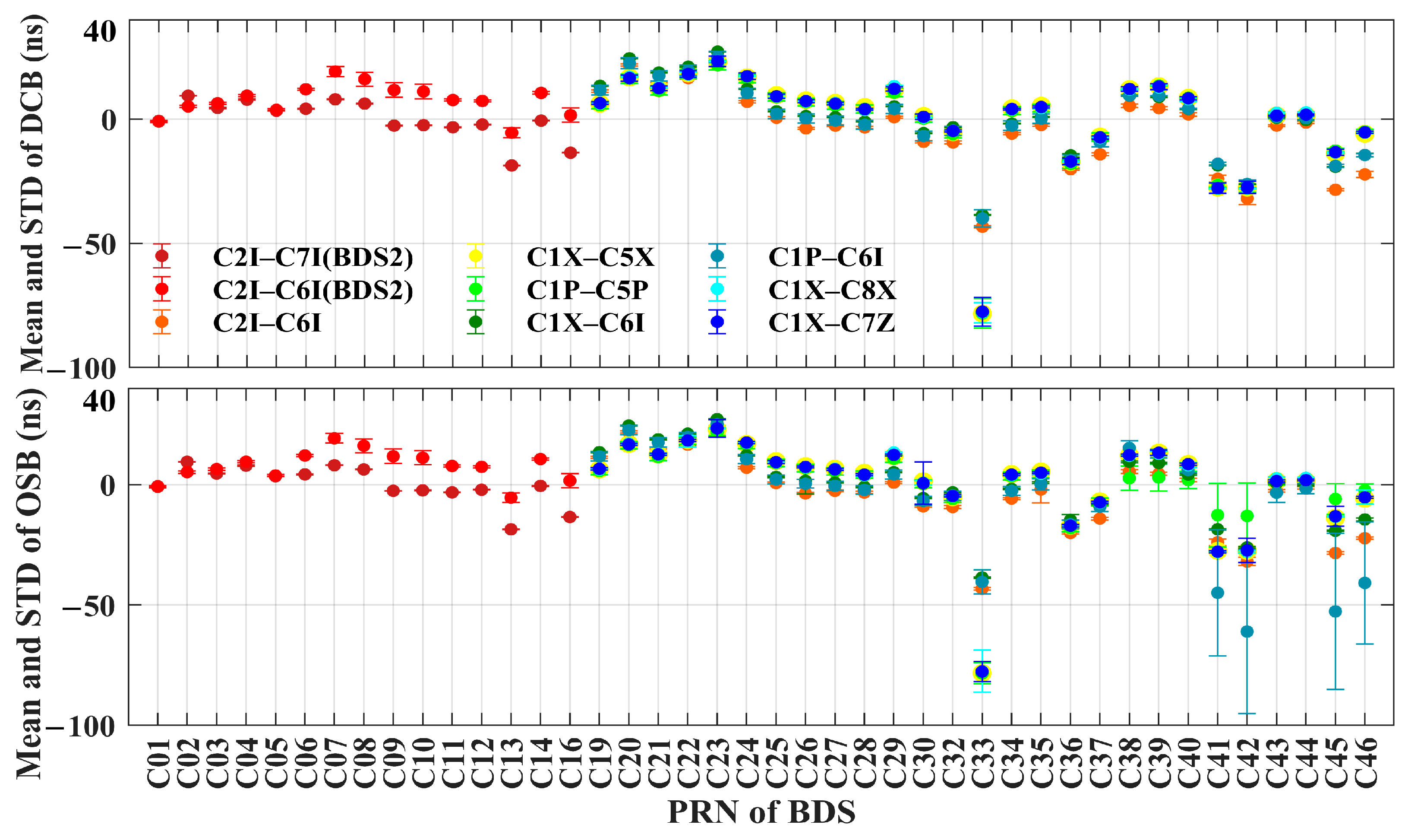
4.2. Comparison of DCB and OSB Obtained from the CAS
5. Impact of BDS Satellite DCB on Positioning
5.1. Performance of SPP
5.2. Performance of PPP
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hakansson, M.; Jensen, A.B.O.; Horemuz, M.; Hedling, G. Review of code and phase biases in multi-GNSS positioning. GPS Solut. 2017, 21, 849–860. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A. Code Biases in Multi-GNSS Point Positioning. In Proceedings of the International Technical Meeting of the Institute-of-Navigation, San Diego, CA, USA, 27–29 January 2013; pp. 616–628. [Google Scholar]
- Zhang, L.; Xu, J.; Yu, H.; Tian, X.; Han, D. Unification of Multi-GNSS Bias Reference and Parameter Optimization of ISB/IFB Random Model. In China Satellite Navigation Conference (CSNC) 2020 Proceedings: Volume III, Proceedings of the CSNC 2020, Chengdu, China, 23–25 May 2020; Springer: Singapore, 2020; p. 1. [Google Scholar]
- Ciraolo, L.; Azpilicueta, F.; Brunini, C.; Meza, A.; Radicella, S.M. Calibration errors on experimental slant total electron content (TEC) determined with GPS. J. Geod. 2007, 81, 111–120. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.H.; Wang, J.L. Timing group delay and differential code bias corrections for BeiDou positioning. J. Geod. 2015, 89, 427–445. [Google Scholar] [CrossRef]
- Zhao, Q.; Gao, C.; Pan, S.; Zhang, R. Accuracy analysis on BDS/GPS/Galileo multi-frequency SPP based on DCB correction. Dongnan Daxue Xuebao (Ziran Kexue Ban)/J. Southeast Univ. (Nat. Sci. Ed.) 2018, 48, 944–948. [Google Scholar] [CrossRef]
- Dai, P.P.; Xing, J.P.; Ge, Y.L.; Yang, X.H.; Qin, W.J.; Dong, Y.C.; Zhang, Z. The Effect of BDS-3 Time Group Delay and Differential Code Bias Corrections on Positioning. Appl. Sci. 2021, 11, 104. [Google Scholar] [CrossRef]
- Zeng, T.; Sui, L.; Bao, Y.; Xiao, G.; Dai, Q.; Yuan, T.; Zhang, Q. The Impact of Satellite Differential Code Bias on BDS Positioning and Correction Model Research. J. Geod. Geodyn. 2017, 37, 53–57. [Google Scholar]
- Gu, S.M.; Dang, Y.M.; Wang, H.; Wang, J.; Ren, Z.Z.; Zhang, J.X. The Effect of DCB Correction on Multi-system Combination Precise Point Positioning. In Proceedings of the 10th China Satellite Navigation Conference (CSNC), Beijing, China, 22–25 May 2019; pp. 305–313. [Google Scholar]
- Wang, L.; Han, J.Q.; Huang, G.W.; Zhang, Q.; Fan, L.H.; Tu, R. Characteristics and Precision Analysis of BeiDou2 Satellite Differential Code Bias Products. Navigation 2018, 65, 377–387. [Google Scholar] [CrossRef]
- Ge, Y.L.; Zhou, F.; Sun, B.Q.; Wang, S.L.; Shi, B. The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning. Sensors 2017, 17, 602. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Chen, J.P.; Gong, X.Q.; Chen, Q. The update of BDS-2 TGD and its impact on positioning. Adv. Space Res. 2020, 65, 2645–2661. [Google Scholar] [CrossRef]
- Liu, G.; Guo, F.; Wang, J.; Du, M.Y.; Qu, L.Z. Triple-Frequency GPS Un-Differenced and Uncombined PPP Ambiguity Resolution Using Observable-Specific Satellite Signal Biases. Remote Sens. 2020, 12, 2310. [Google Scholar] [CrossRef]
- Zhang, Z.; Lou, Y.D.; Zheng, F.; Gu, S.F. ON GLONASS pseudo-range inter-frequency bias solution with ionospheric delay modeling and the undifferenced uncombined PPP. J. Geod. 2021, 95, 32. [Google Scholar] [CrossRef]
- Villiger, A.; Schaer, S.; Dach, R.; Prange, L.; Susnik, A.; Jaggi, A. Determination of GNSS pseudo-absolute code biases and their long-term combination. J. Geod. 2019, 93, 1487–1500. [Google Scholar] [CrossRef]
- Nie, W. Multi-GNSS Global Ionosphere Monitoring and the Unified Handling of the Differential Code Bias. Ph.D. Thesis, Shandong University, Weihai, China, 2019. [Google Scholar]
- Gong, X.P.; Lou, Y.D.; Zheng, F.; Gu, S.F.; Shi, C.; Liu, J.N.; Jing, G.F. Evaluation and calibration of BeiDou receiver-related pseudorange biases. GPS Solut. 2018, 22, 98. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navig.—J. Inst. Navig. 2019, 66, 19–35. [Google Scholar] [CrossRef]
- Li, Z.S.; Yuan, Y.B.; Li, H.; Ou, J.K.; Huo, X.L. Two-step method for the determination of the differential code biases of COMPASS satellites. J. Geod. 2012, 86, 1059–1076. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. In Proceedings of the International Technical Meeting of the Institute-of-Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 802–812. [Google Scholar]
- Wang, N.B.; Yuan, Y.B.; Li, Z.S.; Montenbruck, O.; Tan, B.F. Determination of differential code biases with multi-GNSS observations. J. Geod. 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Zi-shen, L.; Ningbo, W.; Yuan, Y. A Unified Definition and Processing Method of Observable-Specific Signal Biases for Multi-mode and Multi-frequency Global Navigation Satellite System. J. Position. Navig. Timing 2022, 7, 10–20. [Google Scholar]
- Wang, N.B.; Li, Z.S.; Duan, B.B.; Hugentobler, U.; Wang, L. GPS and GLONASS observable-specific code bias estimation: Comparison of solutions from the IGS and MGEX networks. J. Geodesy 2020, 94, 74. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Open Service Performance Standard (Version 2.0); China Satellite Navigation Office: Beijing, China, 2018. [Google Scholar]
- Zhang, Y.Z.; Wang, H.; Chen, J.P.; Wang, A.H.; Meng, L.D.; Wang, E.S. Calibration and Impact of BeiDou Satellite-Dependent Timing Group Delay Bias. Remote Sens. 2020, 12, 192. [Google Scholar] [CrossRef]
- Qin, W.J.; Ge, Y.L.; Zhang, Z.; Yang, H.Y.; Su, H.; Yang, X.H. Enhancing BDS-3 precise time transfer with DCB modelling. Measurement 2021, 174, 108641. [Google Scholar] [CrossRef]
- Wang, N.B.; Li, Z.S.; Montenbruck, O.; Tang, C.P. Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays. Adv. Space Res. 2019, 64, 1764–1779. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Signal | Frequency (MHz) | Band | Channel | Modulation |
|---|---|---|---|---|---|
| BDS-2 | B1I | 1561.098 | 2 | I Q X | Quadrature phase-shift keying (QPSK) |
| B2I | 1207.140 | 7 | I Q X | QPSK | |
| B3I | 1268.520 | 6 | I Q X A | Binary phase-shift keying (BPSK) | |
| BDS-3 | B1I | 1561.098 | 2 | I Q X | BPSK |
| B1C | 1575.420 | 1 | D P X A | Binary offset carrier (BOC) Quadrature Multiplexed Binary Offset Carrier (QMBOC) | |
| B2a | 1176.450 | 5 | D P X | BPSK | |
| B2b | 1207.140 | 7 | D P Z | BPSK | |
| B2(B2a+B2b) | 1191.795 | 8 | D P X | BPSK | |
| B3I | 1268.520 | 6 | I Q X A | BPSK |
| System | OBS1-OBS2 | Signal 1 | Signal 2 | The Number of Satellites |
|---|---|---|---|---|
| BDS-2 | C2I–C7I | B1I | B2b | C01–C14\C16(15) |
| C2I–C6I | B1I | B3I | C01–C14\C16 | |
| BDS-3 | C1X–C5X | B1C | B2a | C19–C30\C32–C46(27) |
| C1P–C5P | B1C | B2a | C19–C30\C32–C46 | |
| C1D–C5D | B1C | B2a | Temporarily no data | |
| C1X–C6I | B1C | B3I | C19–C30\C32–C46 | |
| C1P–C6I | B1C | B3I | C19–C30\C32–C46 | |
| C1D–C6I | B1C | B3I | Temporarily no data | |
| C2I–C6I | B1I | B3I | C19–30\C32–C46 | |
| C1X–C7Z | B1C | B2b | C19–C30\C32–C46 | |
| C1X–C8X | B1C | B2I | C19–C30\C32–C46 |
| System | OSB | Signal | The Number of Satellites |
|---|---|---|---|
| BDS-2 | C2I | B1I | C01–C14\C16(15) |
| C7I | B2b | C01–C14\C16(15) | |
| C6I | B3I | C01–C14\C16(15) | |
| BDS-3 | C1X | B1C | C19–C30\C32–C46(27) |
| C1P | B1C | C19–C30\C32–C46(27) | |
| C5X | B2a | C19–C30\C32–C46(27) | |
| C5P | B2a | C19–C30\C32–C46(27) | |
| C7Z | B2b | C19–C30\C32–C46(27) | |
| C8X | B2 | C19–C30\C32–C46(27) | |
| C2I | B1I | C19–C30\C32–C46(27) | |
| C6I | B3I | C19–C30\C32–C46(27) |
| Satellite Type | Signal | Navigation Message Type | Modulation Method (Data/Pilot) | Symbol Rate (sps) |
|---|---|---|---|---|
| BDS-2-MEO | B1I, B3I | D1 | BPSK | 200 |
| BDS-2-IGSO | B1I, B3I | D1 | BPSK | 200 |
| BDS-2-GEO | B1I, B3I | D2 | BPSK | 200 |
| BDS-3-MEO | B1I, B3I | D1 | BPSK | 200 |
| B1C | B-CNAV1 | BOC/QMBOC | 100/0 | |
| B2a | B-CNAV2 | BPSK/BPSK | 200/0 |
| System | Signal Channel | DCB | Combined OSB | Note (Rejection Rate) | ||
|---|---|---|---|---|---|---|
| Mean (ns) | STD (ns) | Mean (ns) | STD (ns) | |||
| BDS-2 | C2I–C7I | 0 | 0.15 | 0 | 0.14 | 0 |
| C2I–C6I | 7.73 | 1.30 | 7.73 | 1.30 | 0 | |
| BDS-3 | C2I–C6I | −4.29 | 0.61 | −4.59 | 1.14 | OSB:11.11% |
| C1X–C5X | 0 | 0.15 | 0 | 0.22 | 0 | |
| C1P–C5P | −0.31 | 1.53 | −0.31 | 1.41 | 0 | |
| C1X–C6I | 0 | 0.20 | 0 | 0.55 | 0 | |
| C1P–C6I | −0.80 | 1.55 | −2.15 | 2.16 | OSB:18.51% | |
| C1X–C7Z | 0 | 0.45 | 0.02 | 0.84 | 0 | |
| C1X–C8X | 0 | 1.11 | 0.01 | 1.34 | 0 | |
| System | Signal | Mean (ns) | STD (ns) | Excluded Satellites |
|---|---|---|---|---|
| BDS-2 | C2I | −15.02 | 2.54 | No |
| C6I | −22.75 | 3.84 | No | |
| C7I | −15.02 | 2.57 | No | |
| BDS-3 | C1P | 12.36 | 2.54 | C35, C41, C42, C45, C46 |
| C1X | 12.94 | 2.36 | C35, C41, C42 | |
| C2I | 8.34 | 1.15 | No | |
| C5P | 12.66 | 2.47 | C35, C41, C42, C45, C46 | |
| C5X | 12.94 | 2.38 | C35, C41, C42 | |
| C6I | 12.94 | 2.11 | C35, C41, C42 | |
| C7Z | 12.92 | 2.85 | C35, C41, C42 | |
| C8X | 12.93 | 3.11 | C35, C41, C42 |
| Content | Strategy |
|---|---|
| Positioning model | Ionosphere-free combination |
| Elevation mask | 10° |
| Sampling rate | 30 s |
| Observation weighting | Elevation angle weighting |
| Satellite orbit and clock | Products from GFZ analysis center |
| Satellite and receiver antennas | igs14.atx |
| Station coordinates | IGS coordinates of the weekly solution |
| Satellite DCB corrections | DCB products provided by the CAS |
| Troposphere delayed | Dry component: Saastamoinen model Wet component: random wandering process estimation |
| Ionosphere delay | White noise process estimation |
| Relativistic effects | Model correction |
| Phase wrap | Model correction |
| Solid tide | Model correction |
| Earth rotation | Model correction |
| Receiver clock error | White noise process estimation |
| Station coordinates | Time constant estimation |
| Ambiguity | Float solution, constant estimation |
| Deal with signal combination | B1I+B2a, B1I+B3I, B2a+B3I, B2a+B1C, B3I+B1C |
| Processing strategies | Strategy I (no-corr): no correction Strategy II (dcb-corr): DCB correction |
| Filtering | Extended Kalman filtering |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Zhu, Y.; An, Q.; Wang, H.; Su, X. An Analysis of Satellite Multichannel Differential Code Bias for BeiDou SPP and PPP. Remote Sens. 2023, 15, 4470. https://doi.org/10.3390/rs15184470
Wang G, Zhu Y, An Q, Wang H, Su X. An Analysis of Satellite Multichannel Differential Code Bias for BeiDou SPP and PPP. Remote Sensing. 2023; 15(18):4470. https://doi.org/10.3390/rs15184470
Chicago/Turabian StyleWang, Guangxing, Yue Zhu, Qing An, Huizhen Wang, and Xing Su. 2023. "An Analysis of Satellite Multichannel Differential Code Bias for BeiDou SPP and PPP" Remote Sensing 15, no. 18: 4470. https://doi.org/10.3390/rs15184470
APA StyleWang, G., Zhu, Y., An, Q., Wang, H., & Su, X. (2023). An Analysis of Satellite Multichannel Differential Code Bias for BeiDou SPP and PPP. Remote Sensing, 15(18), 4470. https://doi.org/10.3390/rs15184470