

Raw Data Simulation of Spaceborne Synthetic Aperture Radar with Accurate Range Model



Abstract
1. Introduction
- We establish a precise spatial geometric model based on the two-body orbit model and Earth ellipsoid model for spaceborne SAR.
- A range model with a “nonstop-and-go” configuration is established through satellite and ground target motion state vector analysis.
- The target illumination area under elliptical beams is determined based on space coordinate transformation.
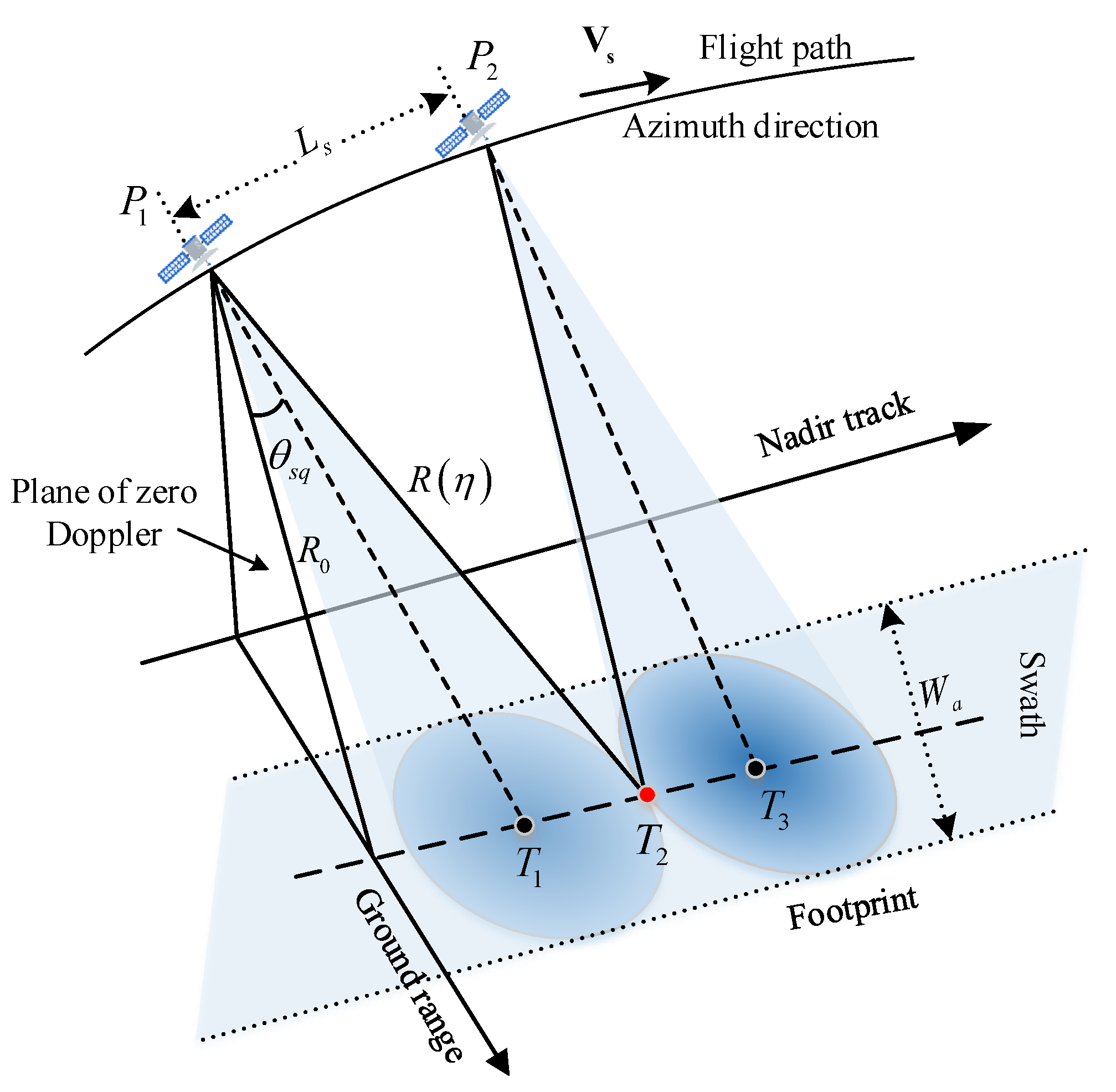
2. SAR Echo Signal Model
3. Space Geometric Model of Spaceborne SAR
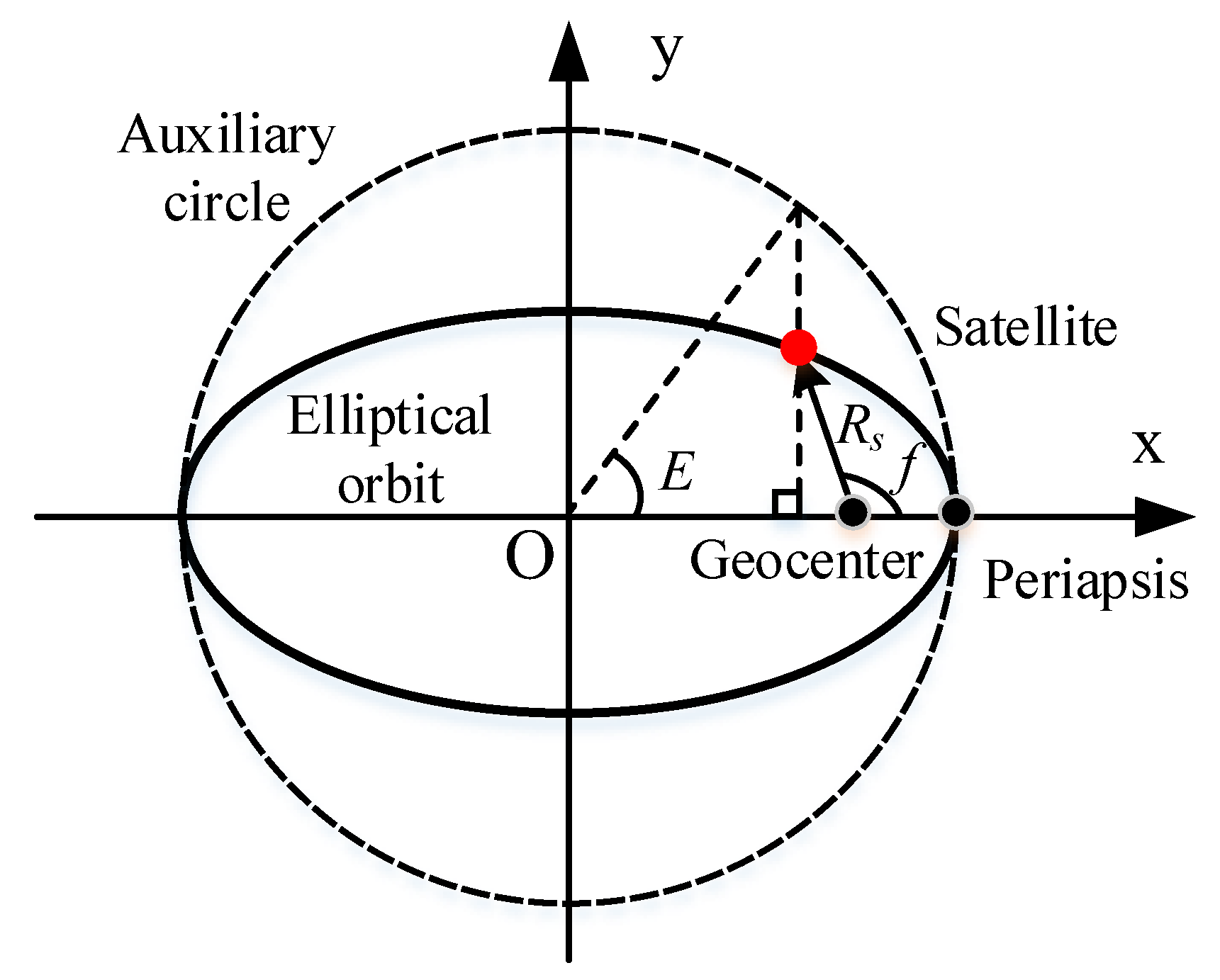
3.1. Two-Body Orbit Model
3.2. Earth Model
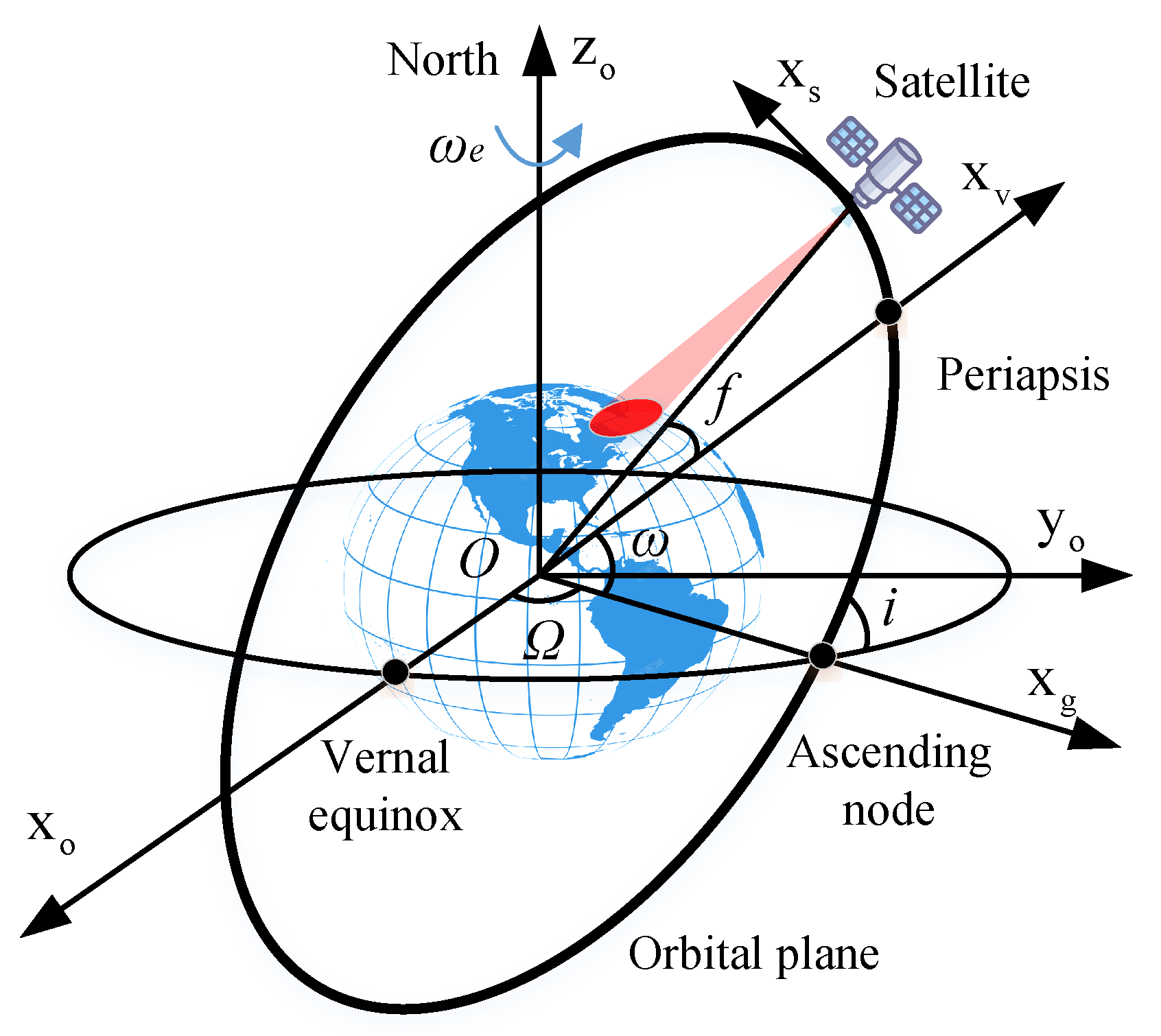
3.3. Spatial Coordinate Systems and Transformation Relationships
3.4. Solution of the State Vector of Space-Earth Motion
4. Spaceborne SAR Raw Data Simulation
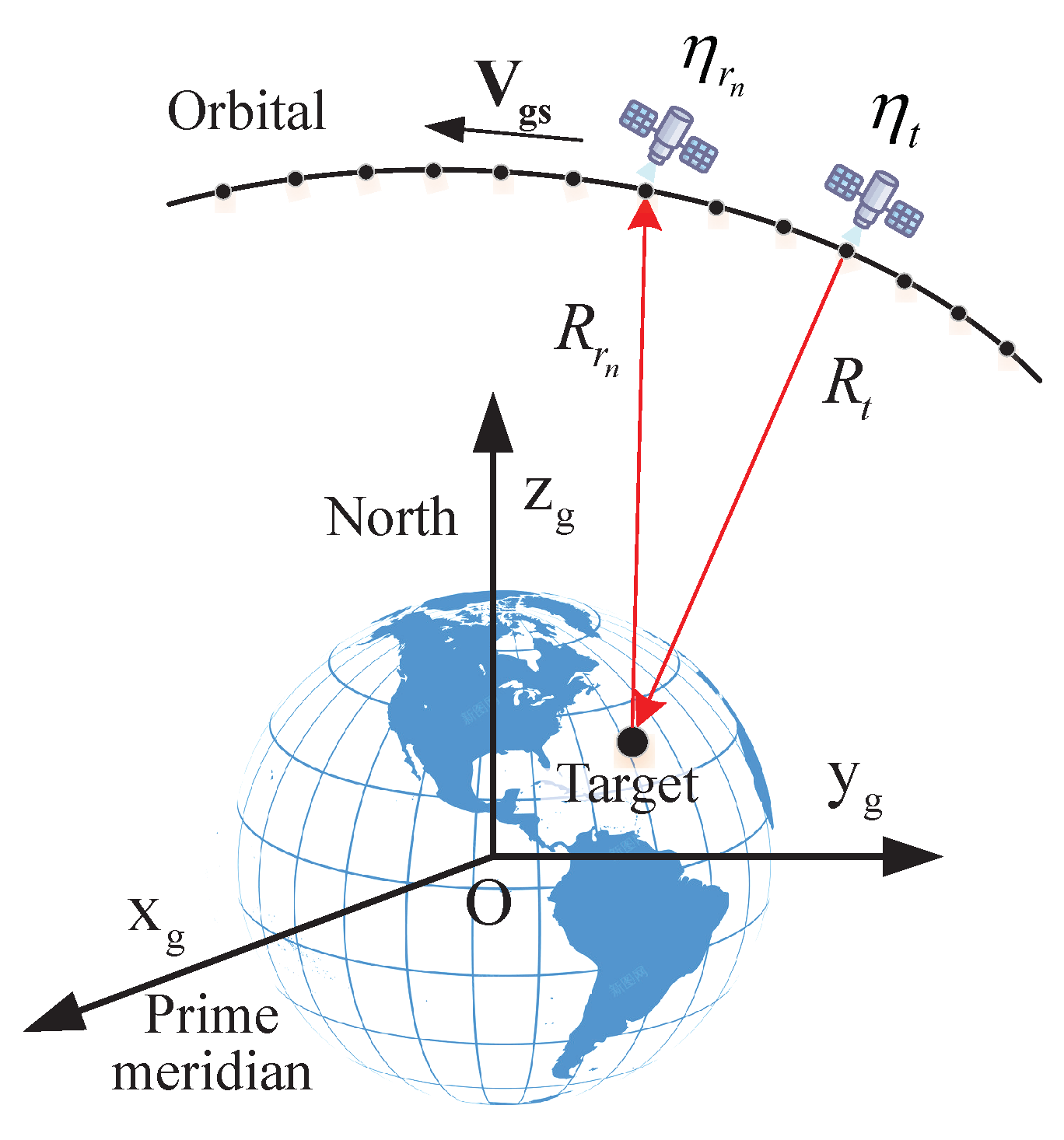
4.1. Accurate Range Model with “Nonstop-and-Go” Configuration
- At a certain azimuth moment , the radar transmits a pulse signal towards the target and calculates the position of the satellite and the transmission range ;
- By iterating to solve the azimuth moment of receiving the echo signal from the target , let , and set its initial value to ;
- After n iterations, calculate the position of the satellite when the echo signal is received at the azimuth time . Then, calculate the reception range of the echo signal at this time;
- Calculate the iteration error . If it is less than the preset accuracy, the iteration is completed, and the final reception range of the target echo signal is . Otherwise, set , , and continue to iterate in step 3 until the required accuracy is met. Generally, the error tolerance can be set to one-quarter of the wavelength to meet the precision requirements.
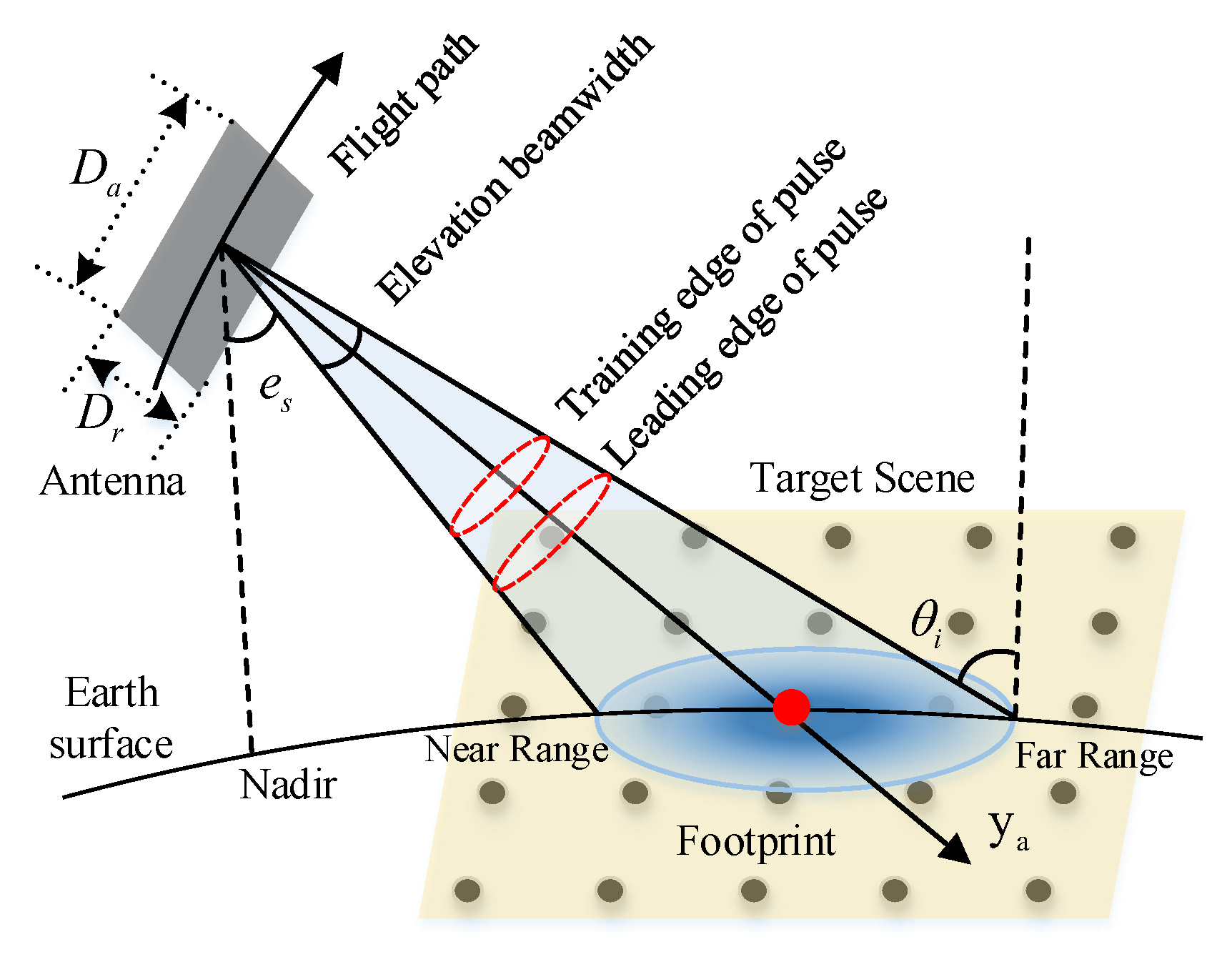
4.2. Determination of Beam Illumination Area
4.3. Raw Data Simulation Based on Time-Domain Method
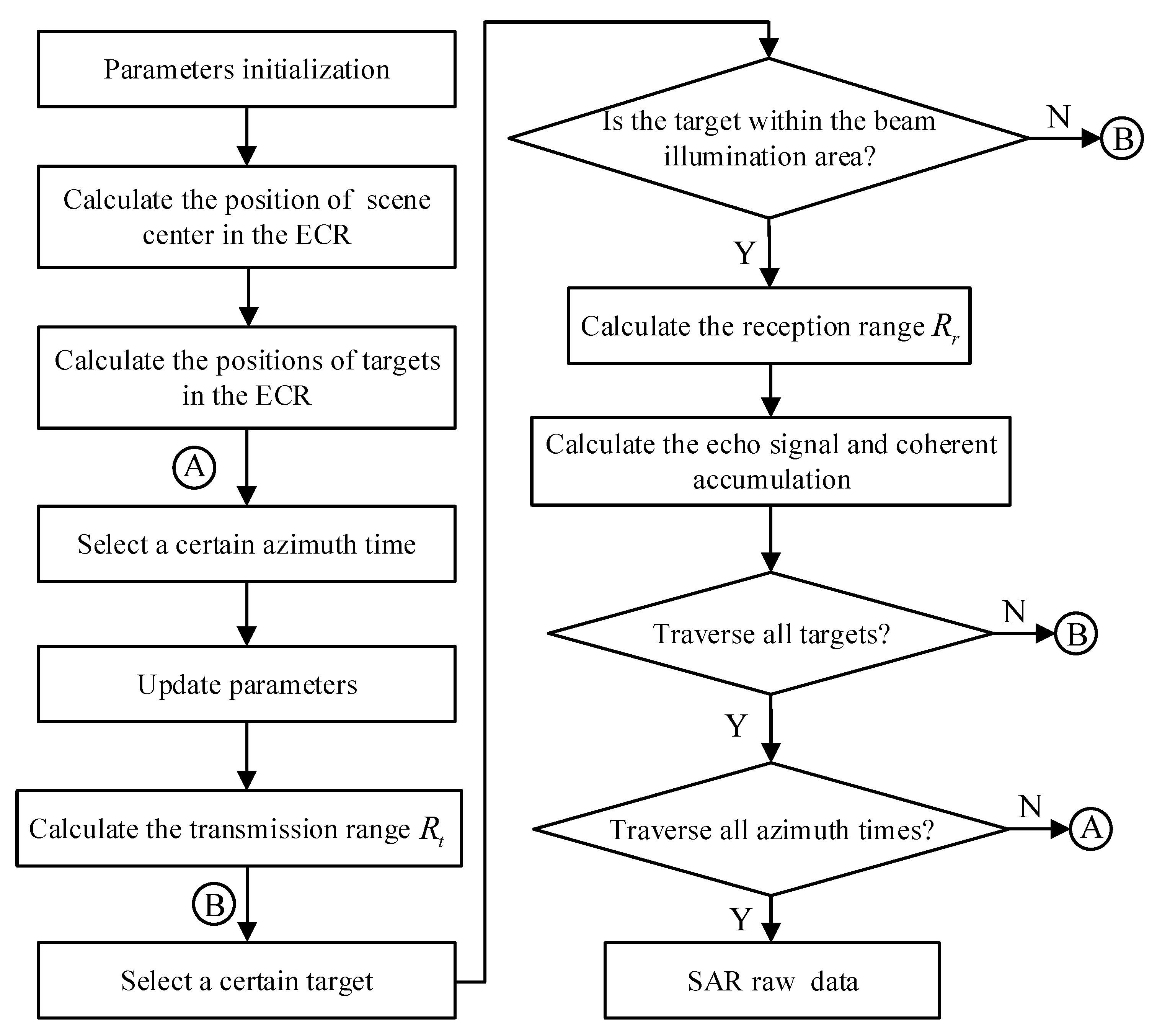
- Initialize the system parameters, including satellite orbit and attitude parameters, Earth model parameters, SAR working parameters, simulation scene parameters, coordinate transformation matrices, etc.
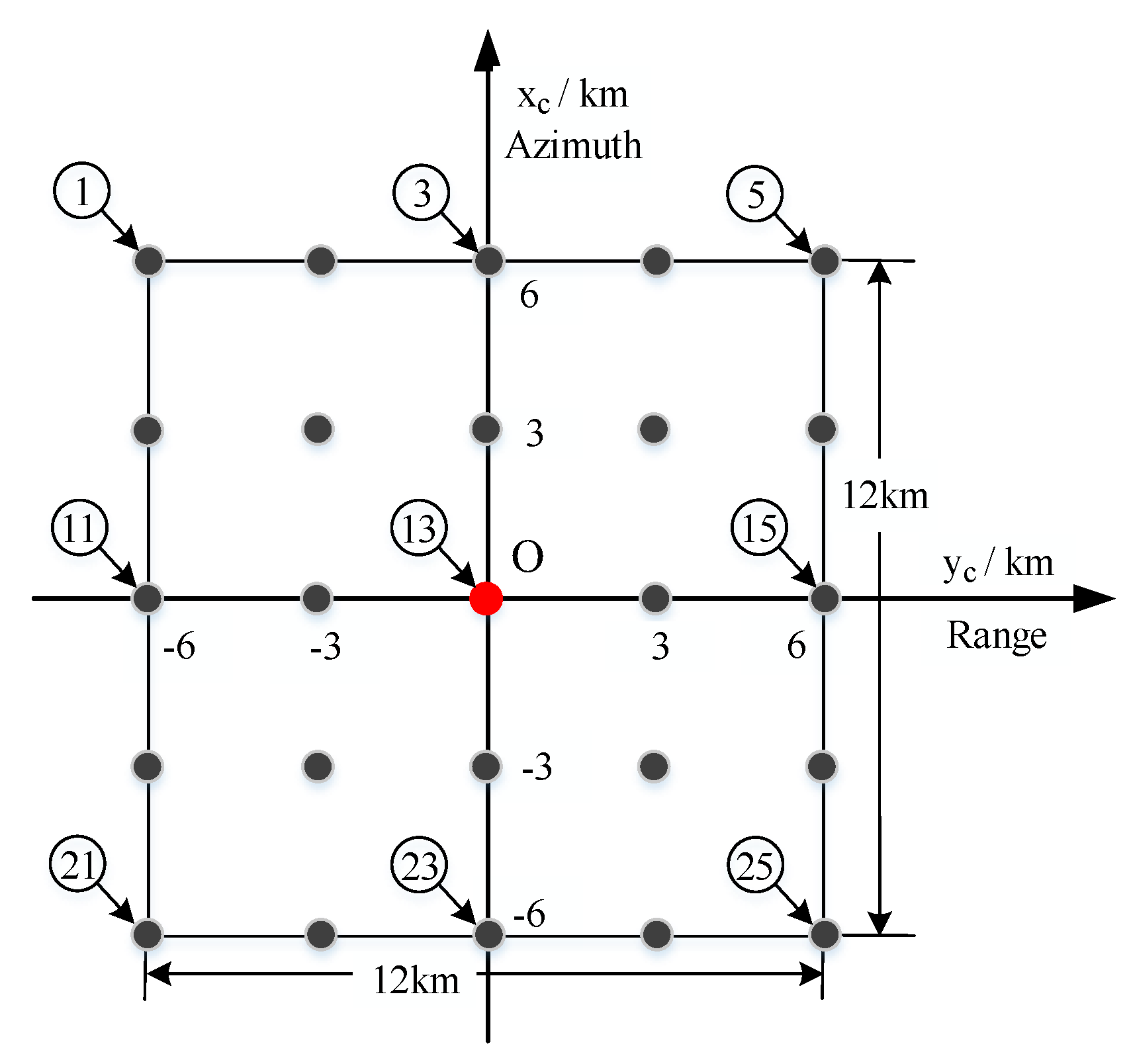
- Calculate the position coordinates of the scene center in the ECR coordinate system based on the space geometry model of the spaceborne SAR and calculate the coordinates of other targets in the scene based on the scene coordinate transformation.
- Compute the orbital parameters, coordinate transformation matrices, and satellite position at a certain azimuth moment.
- Transform the coordinates of each target in the scene to the antenna coordinate system and judge whether they are within the beam illumination area according to the theory introduced in Section 4.2.
- Compute the transmission distance and reception range for each target within the beam illumination area, sum them up as the propagation distance of the signal, and calculate the target’s echo signal.
- Coherently accumulate the echoes of all targets at this azimuth moment, calculate the next azimuth moment, and continue until all azimuth moments have been traversed.
- Finally, simulated echo data of the targets are obtained; details of the echo simulation flow are illustrated in the Figure 7.
5. Simulation Results and Analysis
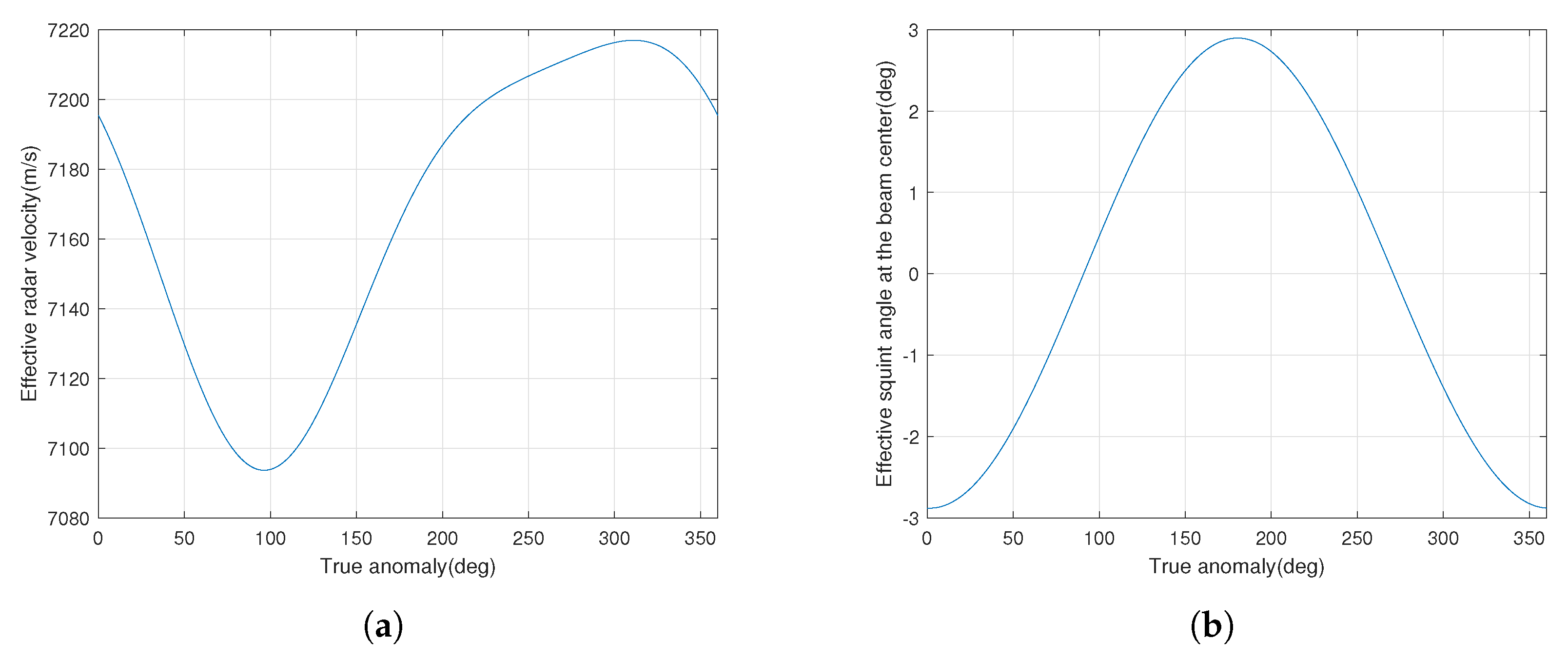
5.1. Simulation of Satellite Key Parameters
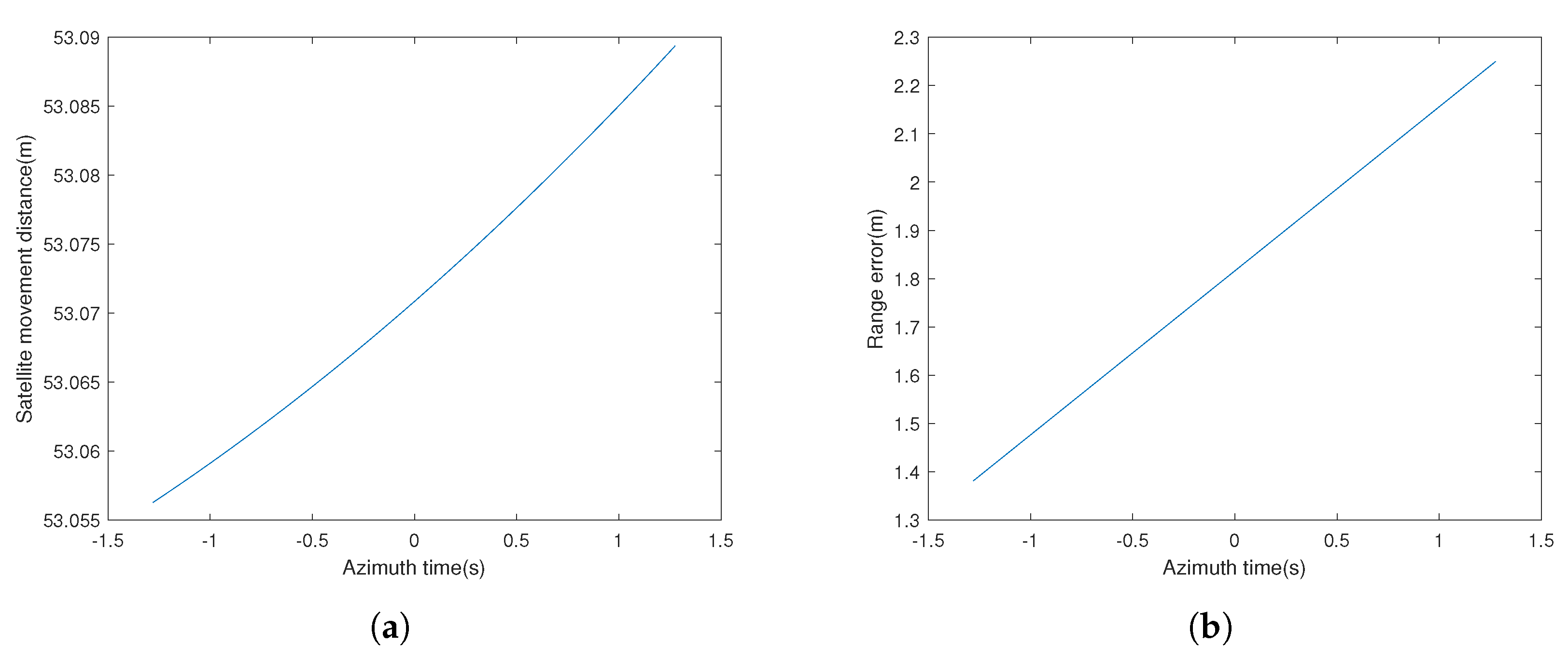
5.2. Simulation of Slant Range with “Nonstop-and-Go” Configuration
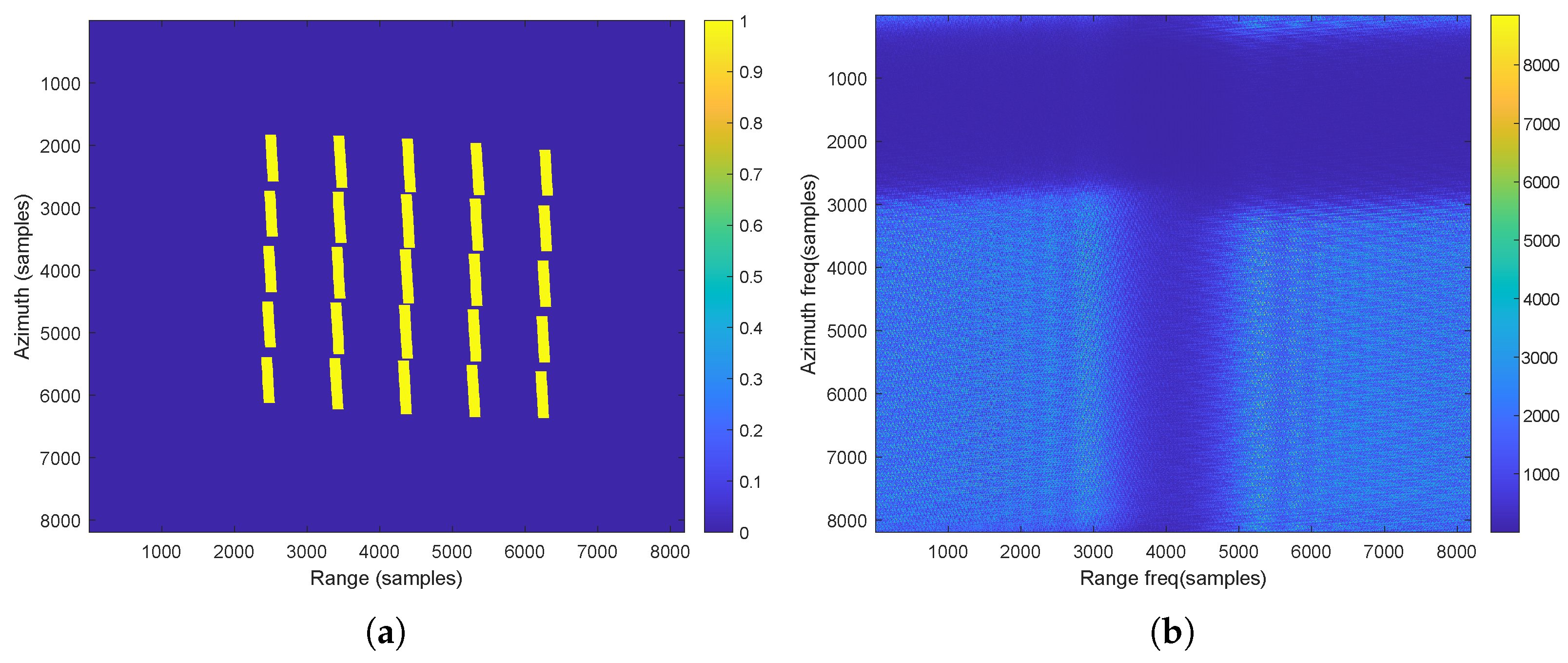
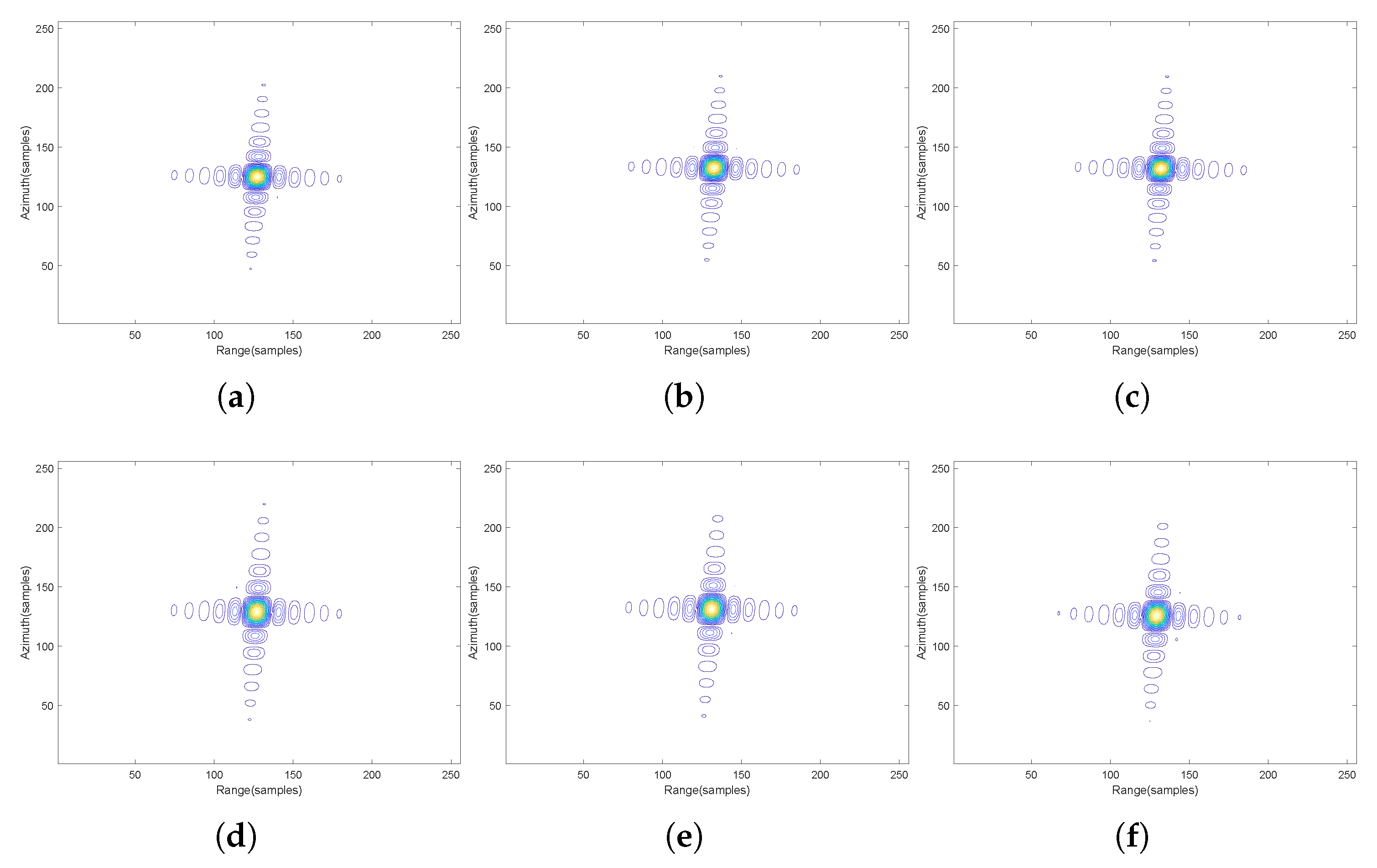
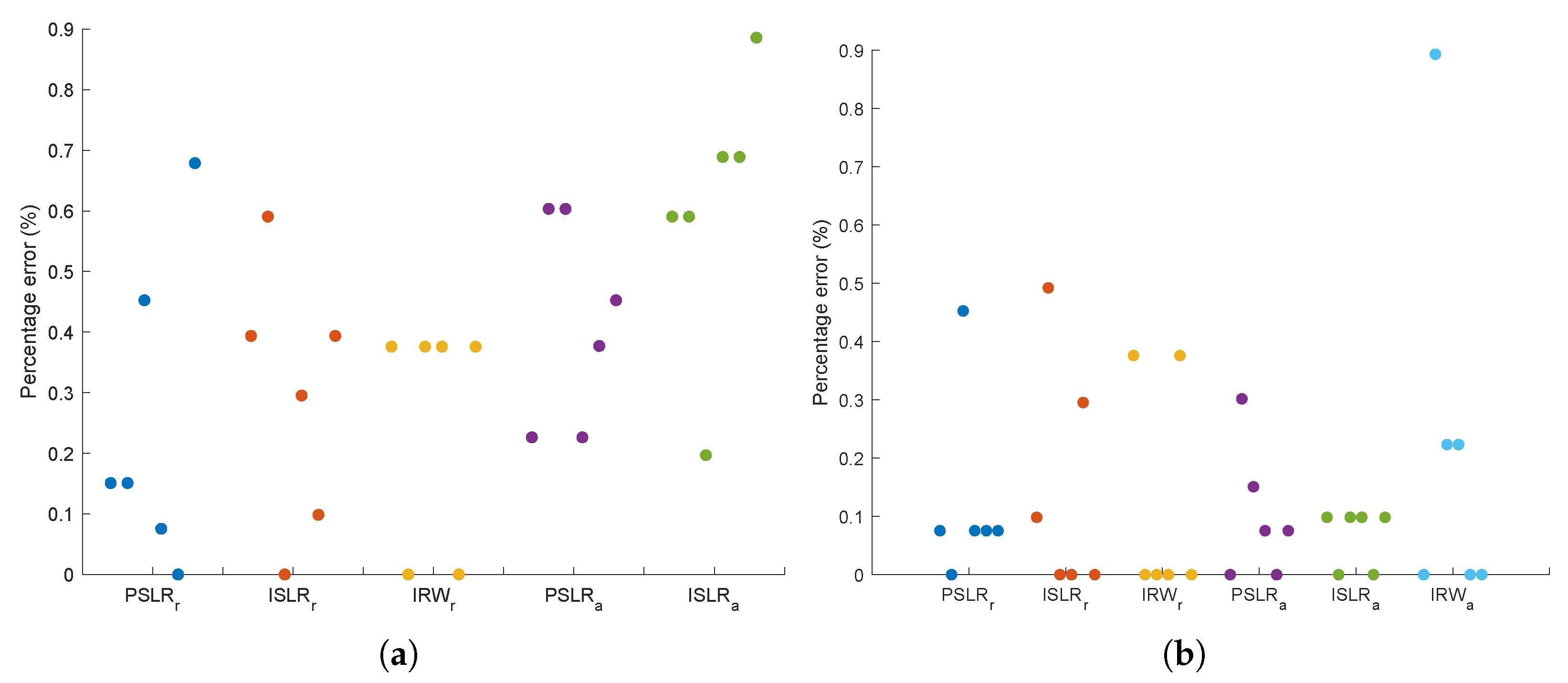
5.3. Raw Data Simulation and Imaging Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CSA | chirp scaling algorithm |
| ECI | ECI (coordinate system) |
| ECR | ECR (coordinate system) |
| FFT | fast Fourier transform |
| FM | frequency modulation |
| IFFT | inverse FFT |
| IRW | impulse response width (resolution) |
| ISLR | integrated sidelobe ratio |
| LEO | low earth orbit |
| LFM | linear frequency modulation |
| PRF | pulse repetition frequency |
| PSLR | peak sidelobe ratio (ratio to main lobe) |
| RAAN | right ascension of the ascending node |
| RCMC | range cell migration correction |
| SAR | synthetic aperture radar |
| WGS-84 | World Geodetic System defined in 1984 |
| WSS | wrapped staring spotlight |
References
- Curlander, J.C.; Mcdonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 1991. [Google Scholar]
- Deng, Y. High-Resolution Wide-Swath SAR Imaging Technology for Spaceborne Platforms; Science Press: Beijing, China, 2020. [Google Scholar]
- Reigber, A.; Scheiber, R.; Jaeger, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-High-Resolution Airborne Synthetic Aperture Radar Imaging: Signal Processing and Applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A Tutorial on Synthetic Aperture Radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Chen, J.; Yang, W.; Wang, P.; Zeng, H.; Men, Z.; Li, C. Review of Novel Azimuthal Multi-Angle Observation Spaceborne SAR Technique. J. Radars 2020, 9, 205–220. [Google Scholar]
- Bayir, I. A Glimpse to Future Commercial Spy Satellite Systems. In Proceedings of the 2009 4th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 11–13 June 2009; pp. 370–375. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Scheiber, R.; Rodriguez-Cassola, M.; Mittermayer, J.; Wollstadt, S.; De Zan, F.; Brautigam, B.; Schwerdt, M.; Reigber, A.; Moreira, A. On the Processing of Very High Resolution Spaceborne SAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6003–6016. [Google Scholar] [CrossRef]
- Mittermayer, J.; Kraus, T.; López-Dekker, P.; Prats-Iraola, P.; Krieger, G.; Moreira, A. Wrapped Staring Spotlight SAR. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5745–5764. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, Z.; Huang, Y.; Wan, J.; Tan, X. SAR Raw Data Simulation for Fluctuant Terrain: A New Shadow Judgment Method and Simulation Result Evaluation Framework. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Kim, S.; Ka, M.H. SAR Raw Data Simulation for Multiple-Input Multiple-Output Video Synthetic Aperture Radar Using Beat Frequency Division Frequency Modulated Continuous Wave. Microw. Opt. Technol. Lett. 2019, 61, 1411–1418. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.W. An Integrated Raw Data Simulator for Airborne Spotlight ECCM SAR. Remote Sens. 2022, 14, 3897. [Google Scholar] [CrossRef]
- Sofiani, R.; Heidar, H.; Kazerooni, M. An Efficient Raw Data Simulation Algorithm for Large Complex Marine Targets and Extended Sea Clutter in Spotlight SAR. Microw. Opt. Technol. Lett. 2018, 60, 1223–1230. [Google Scholar] [CrossRef]
- Zhang, M.; Zhou, P.; Zhang, X.; Dai, Y.; Sun, W. Space-Variant Analysis and Target Echo Simulation of Geosynchronous SAR. J. Eng. 2019, 2019, 5652–5656. [Google Scholar] [CrossRef]
- Zhang, H.; Deng, Y.; Wang, R.; Wang, W.; Jia, X.; Liu, D.; Li, C. End-to-End Bistatic Insar Raw Data Simulation for Twinsar-L Mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019; pp. 3519–3522. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, J.; Li, W.; Wu, J.; Li, Z.; Huang, Y.; Yang, J.; IEEE. Efficient Time Domain Echo Simulation of Bistatic SAR Considering Topography Variation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2020), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2153–2156. [Google Scholar] [CrossRef]
- Yang, L.; Zeng, D.; Yan, J.; Sai, Y. Efficient Strip-Mode SAR Raw-Data Simulator of Extended Scenes Included Moving Targets Based on Reversion of Series. CMC-Comput. Mater. Contin. 2020, 64, 313–323. [Google Scholar] [CrossRef]
- Guo, Z.; Fu, Z.; Chang, J.; Wu, L.; Li, N. A Novel High-Squint Spotlight SAR Raw Data Simulation Scheme in 2-D Frequency Domain. Remote Sens. 2022, 14, 651. [Google Scholar] [CrossRef]
- Liu, B.; He, Y. SAR Raw Data Simulation for Ocean Scenes Using Inverse Omega-K Algorithm. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6151–6169. [Google Scholar] [CrossRef]
- Ji, Y.; Dong, Z.; Zhang, Y.; Zhang, Q.; Sun, Z.; Li, D.; Yu, L. Geosynchronous SAR Raw Data Simulator in Presence of Ionospheric Scintillation Using Reverse Backprojection. Electron. Lett. 2020, 56, 512–514. [Google Scholar] [CrossRef]
- Zhang, F.; Yao, X.; Tang, H.; Yin, Q.; Hu, Y.; Lei, B. Multiple Mode SAR Raw Data Simulation and Parallel Acceleration for Gaofen-3 Mission. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 2115–2126. [Google Scholar] [CrossRef]
- Zhang, F.; Tang, H.; Yin, Q.; Liu, J.; Qiu, X.; Hu, Y.; IEEE. Multiple Mode SAR Raw Data Simulation for GaoFen-3 Mission Evaluation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2097–2100. [Google Scholar]
- Zhang, F.; Hu, C.; Li, W.; Hu, W.; Wang, P.; Li, H.C. A Deep Collaborative Computing Based SAR Raw Data Simulation on Multiple CPU/GPU Platform. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 387–399. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, C.; Li, W.; Hu, W.; Li, H.C. Accelerating Time-Domain SAR Raw Data Simulation for Large Areas Using Multi-GPUs. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 3956–3966. [Google Scholar] [CrossRef]
- Cruz, H.; Véstias, M.; Monteiro, J.; Neto, H.; Duarte, R.P. A Review of Synthetic-Aperture Radar Image Formation Algorithms and Implementations: A Computational Perspective. Remote Sens. 2022, 14, 1258. [Google Scholar] [CrossRef]
- Sun, G.C.; Liu, Y.; Xiang, j.; Liu, W.; Xing, m.; Chen, J. Spaceborne Synthetic Aperture Radar Imaging Algorithms: An Overview. IEEE Geosci. Remote Sens. Mag. 2022, 10, 161–184. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: New York, NY, USA, 2005. [Google Scholar]
- Zhang, R. Satellite Orbit Attitude Dynamics and Control; Beihang University Press: Beijing, China, 1998; pp. 39–71. [Google Scholar]
- Hu, X.; Wang, P.; Chen, J.; Yang, W.; Guo, Y. An Antenna Beam Steering Strategy for Sar Echo Simulation in Highly Elliptical Orbit. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2020), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2149–2152. [Google Scholar] [CrossRef]
- Lorusso, R.; Milillo, G. Stop-and-Go Approximation Effects on COSMO-SkyMed Spotlight SAR Data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2015), Milan, Italy, 26–31 July 2015; pp. 1797–1800. [Google Scholar] [CrossRef]
- Liu, Y.; Xing, M.; Sun, G.; Lv, X.; Bao, Z.; Hong, W.; Wu, Y. Echo Model Analyses and Imaging Algorithm for High-Resolution SAR on High-Speed Platform. IEEE Trans. Geosci. Remote Sens. 2012, 50, 933–950. [Google Scholar] [CrossRef]
- Liu, J.; Li, C.; Tan, X.; Shi, P. Characteristics Analysis of “Stop Go Stop” Hypothesis of GEO SAR. Mod. Radar 2014, 36, 38–42. [Google Scholar]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR Processing Using Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]






 represents the execution node position corresponding to the program’s conditional branch, and
represents the execution node position corresponding to the program’s conditional branch, and  is the same).
represents the execution node position corresponding to the program’s conditional branch, and is the same).
is the same).
represents the execution node position corresponding to the program’s conditional branch, and is the same).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinate | Origin | x-Axis | y-Axis | z-Axis |
|---|---|---|---|---|
| Earth’s center of mass | Prime meridian | Form right-handed system | Same angular momentum as the Earth | |
| Earth’s center of mass | Vernal equinox | Form right-handed system | Same angular momentum as the Earth | |
| Earth’s center of mass | Perigee | Form right-handed system | Same angular momentum as the Earth | |
| Satellite’s center of mass | Direction of satellite velocity | Form right-handed system | Same angular momentum as the Earth | |
| In zero attitude, the same as the . | ||||
| Phase center of the antenna | Same as the x-axis of | Direction of the antenna beam | Form a right-handed coordinate | |
| Scene center | Form a right-handed coordinate | Flight direction | Normal vector points towards the sky | |
| Scene center | East | North | Normal vector points towards the sky | |
| Item | Parameters | Value | Unit |
|---|---|---|---|
| Satellite orbit | Semimajor axis | 7071.004 | km |
| Inclination | 97 | deg | |
| Eccentricity | 0.0011 | ||
| Longitude ascending node | 0 | deg | |
| Argument of perigee | 0 | deg | |
| Center time location | s | ||
| Earth | Earth Model | WGS-84 | |
| Radar | Antenna’s azimuth diameter | 10 | m |
| Antenna’s elevation diameter | 2 | m | |
| Looking angle (right-looking) | −45 | deg | |
| Azimuth angle | 0 | deg | |
| Carrier frequency | 9.6 | GHz | |
| Waveform | Pulse duration | 40 | μs |
| Chirp bandwidth | 50 | MHz | |
| Sampling frequency | 60 | MHz | |
| Pulse repetition frequency | 2000 | Hz |
| Target 3 | Target 13 | Target 23 | Target 5 | Target 15 | Target 25 | |
|---|---|---|---|---|---|---|
| Traditional hyperbolic range model | ||||||
| Location (samples) (range/azimuth) | 2415/4374 | 4097/4374 | 5778/4374 | 2415/6077 | 4097/6077 | 5778/6077 |
| Curved orbit with “stop-and-go” assumption | ||||||
| Location (samples) (range/azimuth) | 2922/4401 | 4709/4374 | 6496/4346 | 2956/6289 | 4743/6262 | 6530/6234 |
| Proposed accurate range model | ||||||
| Location (samples) (range/azimuth) | 2915/4401 | 4702/4374 | 6489/4346 | 2949/6289 | 4736/6262 | 6523/6234 |
| Target 3 | Target 13 | Target 23 | Target 5 | Target 15 | Target 25 | |
|---|---|---|---|---|---|---|
| Traditional hyperbolic range model | ||||||
| PSLR (dB) (range/azimuth) | −13.19/−13.23 | −13.18/−13.33 | −13.19/−13.24 | −13.18/−13.23 | −13.16/−13.31 | −13.18/−13.23 |
| ISLR (dB) (range/azimuth) | −10.20/−10.39 | −10.17/−10.43 | −10.20/−10.39 | −10.23/−10.38 | −10.21/−10.42 | −10.23/−10.38 |
| IRW (m) (range/azimuth) | 2.67/5.01 | 2.67/ 4.97 | 2.67/ 5.01 | 2.66/ 4.99 | 2.66/4.95 | 2.66/4.99 |
| Curved orbit with “stop-and-go” assumption | ||||||
| PSLR (dB) (range/azimuth) | −13.20/−13.26 | −13.20/−13.29 | −13.19/−13.34 | −13.20/−13.27 | −13.17/−13.26 | −13.08/−13.30 |
| ISLR (dB) (range/azimuth) | −10.23/−10.34 | −10.18/−10.37 | −10.20/−10.38 | −10.20/−10.46 | −10.23 /−10.49 | −10.19/−10.46 |
| IRW (m) (range/azimuth) | 2.67/4.47 | 2.67/4.46 | 2.66/4.45 | 2.67/ 5.21 | 2.67/5.22 | 2.67/ 5.17 |
| Proposed accurate range model | ||||||
| PSLR (dB) (range/azimuth) | −13.21/−13.26 | −13.20/−13.25 | −13.25/−13.32 | −13.19/−13.26 | −13.16/−13.26 | −13.09/−13.29 |
| ISLR (dB) (range/azimuth) | −10.24/−10.33 | −10.23/−10.37 | −10.20/−10.37 | −10.20/−10.45 | −10.20/−10.49 | −10.19/−10.47 |
| IRW (m) (range/azimuth) | 2.66/4.47 | 2.67/4.50 | 2.66/4.46 | 2.67/ 5.22 | 2.66/5.22 | 2.67/ 5.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; An, J.; Jiang, X.; Lin, M. Raw Data Simulation of Spaceborne Synthetic Aperture Radar with Accurate Range Model. Remote Sens. 2023, 15, 2705. https://doi.org/10.3390/rs15112705
Li H, An J, Jiang X, Lin M. Raw Data Simulation of Spaceborne Synthetic Aperture Radar with Accurate Range Model. Remote Sensing. 2023; 15(11):2705. https://doi.org/10.3390/rs15112705
Chicago/Turabian StyleLi, Haisheng, Junshe An, Xiujie Jiang, and Meiyan Lin. 2023. "Raw Data Simulation of Spaceborne Synthetic Aperture Radar with Accurate Range Model" Remote Sensing 15, no. 11: 2705. https://doi.org/10.3390/rs15112705
APA StyleLi, H., An, J., Jiang, X., & Lin, M. (2023). Raw Data Simulation of Spaceborne Synthetic Aperture Radar with Accurate Range Model. Remote Sensing, 15(11), 2705. https://doi.org/10.3390/rs15112705