
Spectral–Spatial Complementary Decision Fusion for Hyperspectral Anomaly Detection




Abstract
:
1. Introduction
- (1)
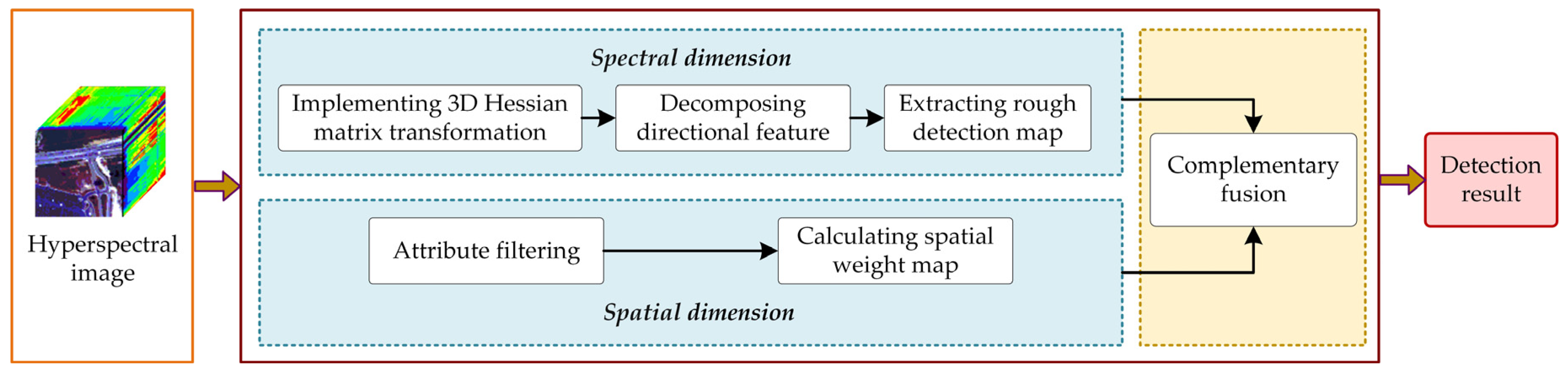
- A spectral–spatial complementary decision fusion (SCDFSCDF) framework was constructed for hyperspectral anomaly detection. In the entire framework, the spectral features and spatial features were fused to ensure satisfactory detection results.
- (2)
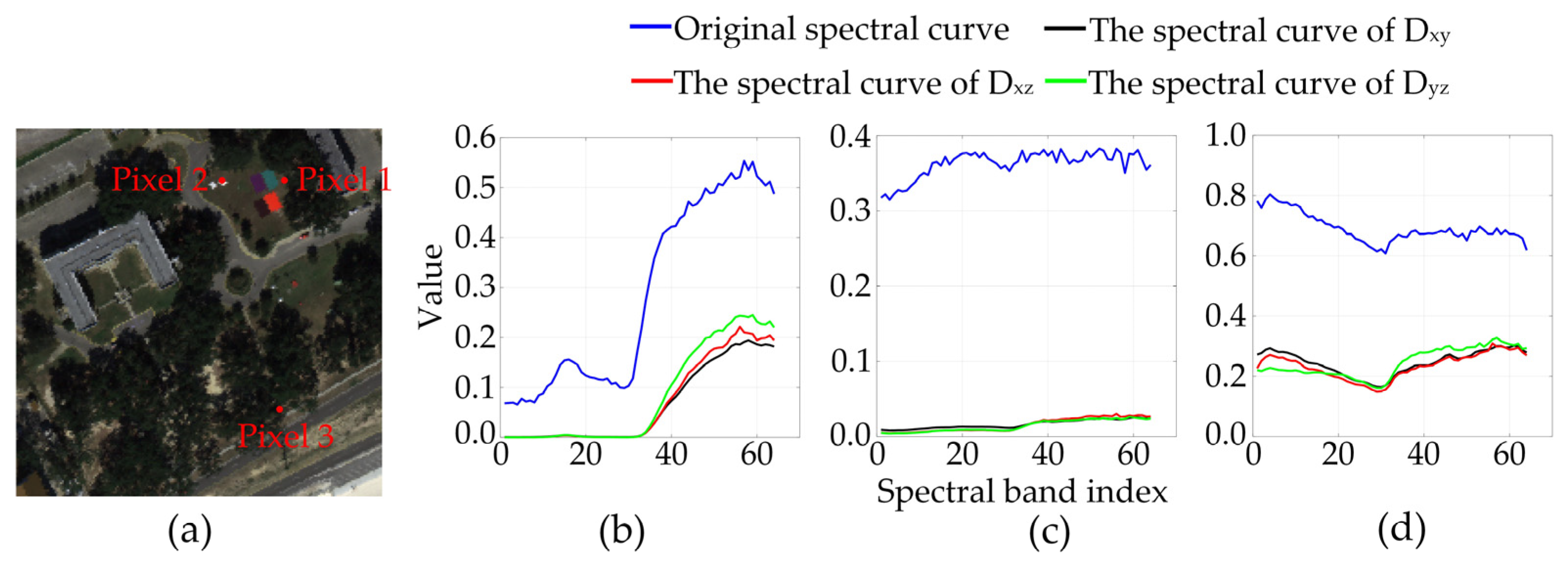
- For the first time, because a three–dimensional Hessian matrix can exploit the spectral information and the three–dimensional spatial structure information of the HSI, it is introduced to hyperspectral anomaly detection to obtain the directional feature images, which can highlight the anomaly targets and suppress the background pixels in HSIs. The three–dimensional Hessian matrix not only contains the spectral information of the HSI, but also does not break the overall structural information of the HSI.
- (3)
- The truncated nuclear norm approximates the rank function more accurately by minimizing the sum of a few of the smallest singular values. Therefore, to more accurately separate the sparse matrix containing anomaly targets from the directional feature images, we exploited LRSMD with the truncated nuclear norm (TNN) and sparse regular terms for the first time in hyperspectral anomaly detection. In the LRSMD, TNN replaced the nuclear norm to better approximate the rank function. In addition, a sparse regular term of the l2,1–norm was added.
2. Proposed Approach
2.1. SCDF Framework
2.2. Spectral Dimension
2.2.1. Three–Dimensional Hessian Matrix of the HSI
2.2.2. LRSMD–TNN
2.2.3. The Extraction of Rough Detection Results
| Algorithm 1 Low–rank and sparse matrix decomposition with truncated nuclear norm |
| Input: Directional feature image D. |
| Initialization: parameter λ > 0 and β > 0, number of singular values r < min(m,n), penalty coefficient μ0 and μmax, parameter ε > 1, reconstruction error τ1 and τ2, number of iterations t = k = 1, L1 = S1 = X1 = X1 = C1 = 0, D1 = D. |
| While Equation (15) does not converge do |
| (1) Update At and Bt according to Equations (10) and (11). |
| While Equation (25) does not converge do |
| (2) Update Lk+1 according to Equation (20). |
| (3) Update Sk+1 according to Equation (21). |
| (4) Update Ck+1 according to Equation (22). |
| (5) Update (X1)k+1 and (X2)k+1 according to Equation (23). |
| (6) Update μk+1 according to Equation (24). |
| End |
| Return Lt+1, St+1 and Dt+1. |
| End |
| Return L and S. |
2.3. Spatial Dimension
2.4. Complementary Fusion
| Algorithm 2 Spectral–spatial complementary decision fusion |
| Input: HSI H. |
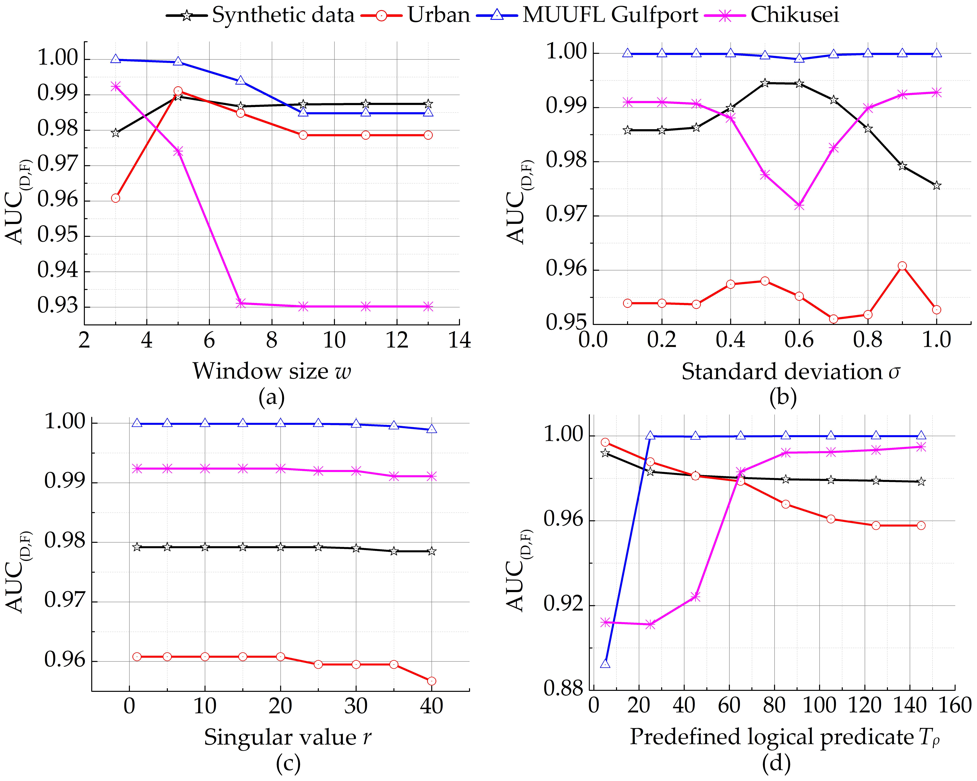
| Initialization: standard deviation σ, window size w, number of singular values r, predefined logical predicate Tρ. |
| (1) Calculate the directional feature images Dxy, Dxz and Dyz by Equations (2)–(4). |
| (2) Calculate the sparse matrix Sl by Algorithm 1. |
| (3) Get the rough detection map El by Equation (26). |
| (4) Extract the spatial feature image M by Equation (27). |
| (5) Calculate the spatial weight map T by Equation (28). |
| (6) Obtain the final detection map F by Equation (29). |
| Return the final detection map F. |
3. Experimental Dataset and Evaluation Indicator
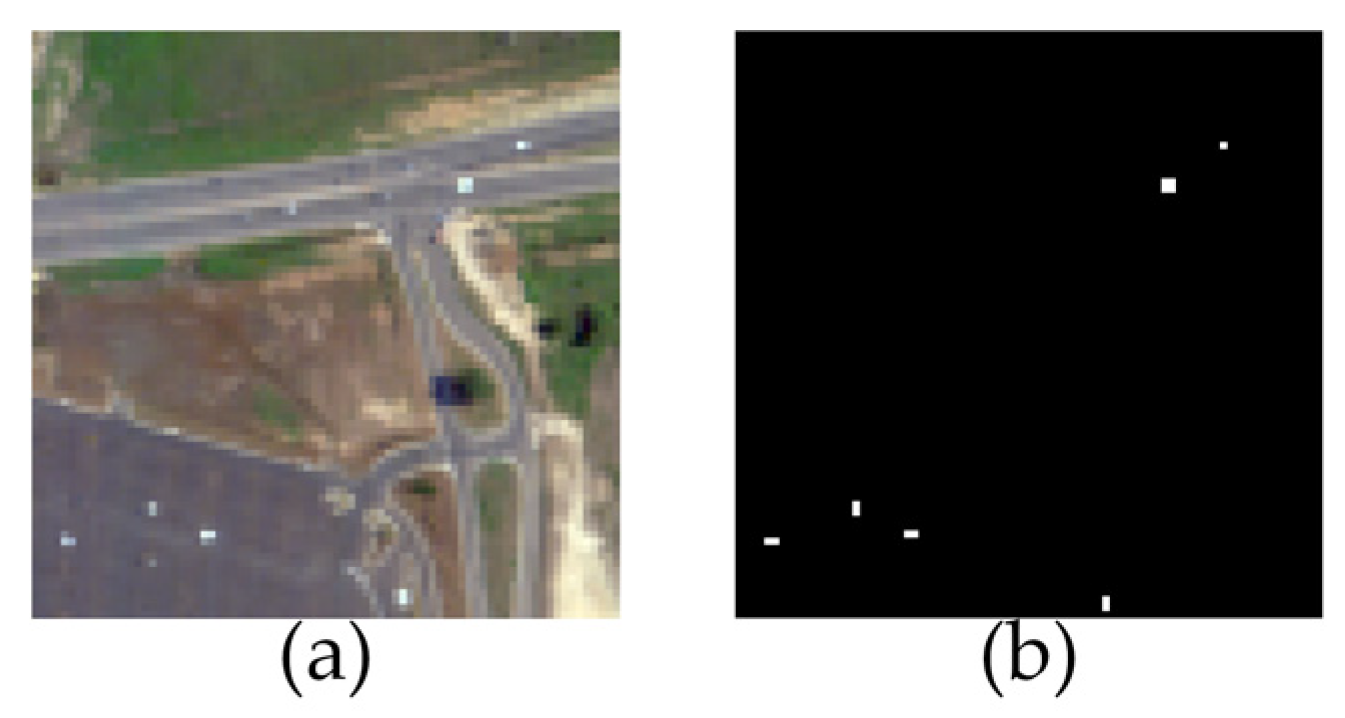
3.1. Experimental Dataset
3.2. Evaluation Indicator
4. Discussion
4.1. Parameter Analysis
4.2. Experimental Results and Discussion
4.3. Complementary Dimension Performance Analysis
4.4. The Performance Analysis of TNN
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, G.; Li, F.; Zhang, X.; Laakso, K.; Chan, J.C.-W. Archetypal analysis and structured sparse representation for hyperspectral anomaly detection. Remote Sens. 2021, 13, 4102. [Google Scholar] [CrossRef]
- Tang, L.; Li, Z.; Wang, W.; Zhao, B.; Pan, Y.; Tian, Y. An efficient and robust framework for hyperspectral anomaly detection. Remote Sens. 2021, 13, 4247. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, L.; Cen, Y.; Chen, L.; Wang, Y. A fast hyperspectral anomaly detection algorithm based on greedy bilateral smoothing and extended multi-attribute profile. Remote Sens. 2021, 13, 3954. [Google Scholar] [CrossRef]
- Zhu, X.; Cao, L.; Wang, S.; Gao, L.; Zhong, Y. Anomaly detection in airborne Fourier transform thermal infrared spectrometer images based on emissivity and a segmented low-rank prior. Remote Sens. 2021, 13, 754. [Google Scholar] [CrossRef]
- Das, S.; Bhattacharya, S.; Khatri, P.K. Feature extraction approach for quality assessment of remotely sensed hyperspectral images. J. Appl. Remote Sens. 2020, 14, 026514. [Google Scholar] [CrossRef]
- Wang, J.; Xia, Y.; Zhang, Y. Anomaly detection of hyperspectral image via tensor completion. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1099–1103. [Google Scholar] [CrossRef]
- Li, Z.; He, F.; Hu, H.; Wang, F.; Yu, W. Random collective representation-based detector with multiple features for hyperspectral images. Remote Sens. 2021, 13, 721. [Google Scholar] [CrossRef]
- Xiang, P.; Song, J.; Li, H.; Gu, L.; Zhou, H. Hyperspectral anomaly detection with harmonic analysis and low-rank decomposition. Remote Sens. 2019, 11, 3028. [Google Scholar] [CrossRef] [Green Version]
- Farooq, S.; Govil, H. Mapping regolith and gossan for mineral exploration in the eastern Kumaon Himalaya, India using hyperion data and object oriented image classification. Adv. Space Res. 2014, 53, 1676–1685. [Google Scholar] [CrossRef]
- Moriya, É.A.S.; Imai, N.N.; Tommaselli, A.M.G.; Miyoshi, G.T. Mapping mosaic virus in sugarcane based on hyperspectral images. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 740–748. [Google Scholar] [CrossRef]
- Ellis, R.J.; Scott, P.W. Evaluation of hyperspectral remote sensing as a means of environmental monitoring in the St. Austell China clay (kaolin) region, Cornwall, UK. Remote Sens. Environ. 2004, 93, 118–130. [Google Scholar] [CrossRef]
- Liang, J.; Zhou, J.; Tong, L.; Bai, X.; Wang, B. Material based salient object detection from hyperspectral images. Pattern Recogn. 2018, 76, 476–490. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Zhang, L. Spectral–spatial stacked autoencoders based on low-rank and sparse matrix decomposition for hyperspectral anomaly detection. Infrared Phys. Technol. 2018, 92, 166–176. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, C. A spectral-spatial method based on low-rank and sparse matrix decomposition for hyperspectral anomaly detection. Int. J. Remote Sens. 2017, 38, 4047–4068. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Theiler, J. An overview of background modeling for detection of targets and anomalies in hyperspectral remotely sensed imagery. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 2317–2336. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and linear filter-based RXD: Improving background statistics estimation for anomaly detection in hyperspectral imagery. IEEE J. Sel. Top/ Appl. Earth Observ. Remote Sens. 2014, 7, 2351–2366. [Google Scholar] [CrossRef]
- Carlotto, M.J. A cluster-based approach for detecting man-made objects and changes in imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 374–384. [Google Scholar] [CrossRef]
- Tao, R.; Zhao, X.; Li, W.; Li, H.C.; Du, Q. Hyperspectral anomaly detection by fractional Fourier entropy. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 4920–4929. [Google Scholar] [CrossRef]
- Liu, J.; Hou, Z.; Li, W.; Tao, R.; Orlando, D.; Li, H. Multipixel anomaly detection with unknown patterns for hyperspectral imagery. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Chen, S.; Chang, C.I.; Li, X. Component decomposition analysis for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5516222. [Google Scholar] [CrossRef]
- Tu, B.; Yang, X.; Ou, X.; Zhang, G.; Li, J.; Plaza, A. Ensemble entropy metric for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5513617. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Zhou, J.; Kwan, C.; Ayhan, B.; Eismann, M.T. A novel cluster kernel RX algorithm for anomaly and change detection using hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6497–6504. [Google Scholar] [CrossRef]
- Xie, W.; Jiang, T.; Li, Y.; Jia, X.; Lei, J. Structure tensor and guided filtering-based algorithm for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4218–4230. [Google Scholar] [CrossRef]
- Xing, C.; Wang, M.; Dong, C.; Duan, C.; Wang, Z. Joint sparse-collaborative representation to fuse hyperspectral and multispectral images. Signal Process. 2020, 173, 107585. [Google Scholar] [CrossRef]
- Wang, X.; Zhong, Y.; Cui, C.; Zhang, L.; Xu, Y. Autonomous endmember detection via an abundance anomaly guided saliency prior for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2336–2351. [Google Scholar] [CrossRef]
- Chen, Y.; Nasrabadi, N.M.; Tran, T.D. Sparse representation for target detection in hyperspectral imagery. IEEE J. Sel. Top. Signal Process. 2011, 5, 629–640. [Google Scholar] [CrossRef]
- Li, W.; Du, Q. Collaborative representation for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1463–1474. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, B.; Zhang, L.; Wang, S. A low-rank and sparse matrix decomposition-based Mahalanobis distance method for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1376–1389. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Li, J.; Plaza, A.; Wei, Z. Anomaly detection in hyperspectral images based on low-rank and sparse representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1990–2000. [Google Scholar] [CrossRef]
- Li, L.; Li, W.; Du, Q.; Tao, R. Low-rank and sparse decomposition with mixture of gaussian for hyperspectral anomaly detection. IEEE Trans. Cybern. 2021, 51, 4363–4372. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Fan, G.; Jin, Q.; Huang, J.; Mei, X.; Ma, J. Hyperspectral anomaly detection via integration of feature extraction and background purification. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1436–1440. [Google Scholar] [CrossRef]
- Qu, Y.; Wang, W.; Guo, R.; Ayhan, B.; Kwan, C.; Vance, S.; Qi, H. Hyperspectral anomaly detection through spectral unmixing and dictionary-based low-rank decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4391–4405. [Google Scholar] [CrossRef]
- Li, L.; Li, W.; Qu, Y.; Zhao, C.; Tao, R.; Du, Q. Prior-based tensor approximation for anomaly detection in hyperspectral imagery. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–14. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, B. Graph and total variation regularized low-rank representation for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 391–406. [Google Scholar] [CrossRef]
- Nassif, A.B.; Talib, M.A.; Nasir, Q.; Dakalbab, F.M. Machine learning for anomaly detection: A systematic review. IEEE Access. 2021, 9, 78658–78700. [Google Scholar] [CrossRef]
- Racetin, I.; Krtali, A. Systematic review of anomaly detection in hyperspectral remote sensing applications. Appl. Sci. 2021, 11, 4878. [Google Scholar] [CrossRef]
- Xiang, P.; Zhou, H.; Li, H.; Song, S.; Tan, W.; Song, J.; Gu, L. Hyperspectral anomaly detection by local joint subspace process and support vector machine. Int. J. Remote Sens. 2020, 41, 3798–3819. [Google Scholar] [CrossRef]
- Xie, W.; Li, Y.; Lei, J.; Yang, J.; Chang, C.; Li, Z. Hyperspectral band selection for spectral-spatial anomaly detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3426–3436. [Google Scholar] [CrossRef]
- Du, B.; Zhao, R.; Zhang, L.; Zhang, L. A spectral-spatial based local summation anomaly detection method for hyperspectral images. Signal Process. 2016, 124, 115–131. [Google Scholar] [CrossRef]
- Zhang, X.; Wen, G.; Dai, W. A tensor decomposition-based anomaly detection algorithm for hyperspectral image. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5801–5820. [Google Scholar] [CrossRef]
- Lei, J.; Xie, W.; Yang, J.; Li, Y.; Chang, C.I. Spectral-spatial feature extraction for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8131–8143. [Google Scholar] [CrossRef]
- Yao, X.; Zhao, C. Hyperspectral anomaly detection based on the bilateral filter. Infrared Phys. Technol. 2018, 92, 144–153. [Google Scholar] [CrossRef]
- Zhao, C.; Li, C.; Feng, S.; Su, N.; Li, W. A spectral-spatial anomaly target detection method based on fractional Fourier transform and saliency weighted collaborative representation for hyperspectral images. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2020, 13, 5982–5997. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, W.; Huang, J. Exploiting embedding manifold of autoencoders for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1527–1537. [Google Scholar] [CrossRef]
- Lindeberg, T. Feature detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 79–116. [Google Scholar] [CrossRef]
- Su, P.; Liu, D.; Li, X.; Liu, Z. A saliency-based band selection approach for hyperspectral imagery inspired by scale selection. IEEE Geosci. Remote Sens. Lett. 2018, 15, 572–576. [Google Scholar] [CrossRef]
- Du, Y.P.; Parker, D.L. Vessel enhancement filtering in three-dimensional MR angiograms using long-range signal correlation. J. Magn. Reson. Imaging 1997, 7, 447–450. [Google Scholar] [CrossRef]
- Skurikhin, A.N.; Garrity, S.R.; McDowell, N.G.; Cai, D.M.M. Automated tree crown detection and size estimation using multi-scale analysis of high-resolution satellite imagery. Remote Sens. Lett. 2013, 4, 465–474. [Google Scholar] [CrossRef]
- Sun, W.; Liu, C.; Li, J.; Lai, Y.M.; Li, W. Low-rank and sparse matrix decomposition-based anomaly detection for hyperspectral imagery. J. Appl. Remote Sens. 2014, 8, 083641. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, D.; Ye, J.; Li, X.; He, X. Fast and accurate matrix completion via truncated nuclear norm regularization. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2117–2130. [Google Scholar] [CrossRef]
- Cao, F.; Chen, J.; Ye, H.; Zhao, J.; Zhou, Z. Recovering low-rank and sparse matrix based on the truncated nuclear norm. Neural Netw. 2017, 85, 10–20. [Google Scholar] [CrossRef]
- Gai, S. Color image denoising via monogenic matrix-based sparse representation. Vis. Comput. 2019, 35, 109–122. [Google Scholar] [CrossRef]
- Wright, J.; Yi, M.; Mairal, J.; Sapiro, G.; Huang, T.S.; Yan, S. Sparse representation for computer vision and pattern recognition. Proc. IEEE 2010, 98, 1031–1044. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wright, J.; Huang, T.S.; Ma, Y. Image super-resolution via sparse representation. IEEE Trans. Image Process. 2010, 19, 2861–2873. [Google Scholar] [CrossRef]
- Zhang, D.; Hu, Y.; Ye, J.; Li, X.; He, X. Matrix completion by truncated nuclear norm regularization. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2192–2199. [Google Scholar]
- Xue, Z.; Dong, J.; Zhao, Y.; Liu, C.; Chellali, R. Low-rank and sparse matrix decomposition via the truncated nuclear norm and a sparse regularizer. Vis. Comput. 2019, 35, 1549–1566. [Google Scholar] [CrossRef]
- Kong, W.; Song, Y.; Liu, J. Hyperspectral image denoising via framelet transformation based three-modal tensor nuclear norm. Remote Sens. 2021, 13, 3829. [Google Scholar] [CrossRef]
- Merhav, N.; Kresch, R. Approximate convolution using DCT coefficient multipliers. IEEE Trans. Circuits Syst. Video Technol. 1998, 8, 378–385. [Google Scholar] [CrossRef]
- Andika, F.; Rizkinia, M.; Okuda, M. A hyperspectral anomaly detection algorithm based on morphological profile and attribute filter with band selection and automatic determination of maximum area. Remote Sens. 2020, 12, 3387. [Google Scholar] [CrossRef]
- Kang, X.; Zhang, X.; Li, S.; Li, K.; Li, J.; Benediktsson, J.A. Hyperspectral anomaly detection with attribute and edge-preserving filters. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5600–5611. [Google Scholar] [CrossRef]
- Tan, K.; Hou, Z.; Wu, F.; Du, Q.; Chen, Y. Anomaly detection for hyperspectral imagery based on the regularized subspace method and collaborative representation. Remote Sens. 2019, 11, 1318. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Wen, G.; Qiu, S. Low-rank and sparse matrix decomposition with cluster weighting for hyperspectral anomaly detection. Remote Sens. 2018, 10, 707. [Google Scholar] [CrossRef] [Green Version]
- Du, X.; Zare, A. Technical Report: Scene Label Ground Truth Map for MUUFL Gulfport Data Set; Tech. Rep. 20170417; University of Florida Technical Report: Gainesville, FL, USA, 2017. [Google Scholar]
- Yokoya, N.; Iwasaki, A. Airborne hyperspectral data over Chikusei. Space Appl. Lab. Univ. Tokyo Jpn. 2016, SAL-2016-05-27, 1–6. [Google Scholar]
- Chang, C.I. An effective evaluation tool for hyperspectral target detection: 3d receiver operating characteristic curve analysis. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5131–5153. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameter Setting |
|---|---|
| LRX | The size of window: (3, 5), (11, 15), (13, 31), (13, 15) |
| LSMAD | The rank: 5, 6, 6, 30 |
| The cardinality: 10, 1, 1, 5 | |
| LSDM–MoG | The rank: 60, 60, 30, 60 |
| The number of mixture Gaussian noise: 4, 4, 4, 4 | |
| CDASC | The value of virtual dimensionality: 13, 10, 15, 10 |
| The number of principal components: 2, 4, 6, 7 | |
| The number of independent components: 11, 6, 9, 3 | |
| 2S–GLRT | The size of window: (3, 5), (5, 7), (13, 25), (5, 7) |
| BFAD | The size of window: (3, 5), (3, 5), (13, 31), (5, 7) |
| The outputting sensitivity of spatial distance weight: 0.8, 5, 10, 0.5 | |
| The outputting sensitivity of spectral distance weight: 0.3, 1, 1, 0.3 | |
| SSFSCRD | The size of window: (3, 5), (5, 7), (13, 21), (3, 5) |
| The fractional order: 0.8, 0.5, 0.8, 0.9 | |
| The Lagrange multiplier: 0.5, 1, 0.1, 0.1 | |
| The weighting coefficient: 0.5, 0.1, 0.1, 0.1 | |
| AED | The band number: 3, 3, 3, 3 |
| The thresholding number: 5, 25, 125, 25 | |
| The domain transform recursive filtering: (1, 0.1). (5, 1), (5, 1), (5, 1) |
| Method | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|
| RX | 0.8073 | 0.2143 | 0.0314 | 1.0216 | 0.7759 | 6.8318 | 0.1829 | 0.9903 |
| LRX | 0.9895 | 0.2414 | 0.00008 | 1.2309 | 0.9894 | 3003.0358 | 0.2413 | 1.2309 |
| LSMAD | 0.8911 | 0.3640 | 0.0191 | 1.2551 | 0.8720 | 19.0536 | 0.3449 | 1.2360 |
| LSDM–MoG | 0.9713 | 0.5205 | 0.0342 | 1.4918 | 0.9370 | 15.2135 | 0.4863 | 1.4576 |
| CDASC | 0.9919 | 0.3725 | 0.0013 | 1.3644 | 0.9906 | 280.9193 | 0.3712 | 1.3631 |
| 2S–GLRT | 0.9491 | 0.1744 | 0.0049 | 1.1235 | 0.9441 | 35.3608 | 0.1695 | 1.1185 |
| BFAD | 0.9603 | 0.9340 | 0.2910 | 1.8943 | 0.6693 | 3.2093 | 0.6430 | 1.6033 |
| SSFSCRD | 0.9916 | 0.4713 | 0.0083 | 1.4629 | 0.9833 | 56.8626 | 0.4630 | 1.4546 |
| AED | 0.9895 | 0.6785 | 0.0030 | 1.6680 | 0.9865 | 226.3940 | 0.6755 | 1.6650 |
| SCDF | 0.9982 | 0.4851 | 0.0005 | 1.4833 | 0.9976 | 844.0422 | 0.4845 | 1.4828 |
| Method | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|
| RX | 0.9628 | 0.3859 | 0.0509 | 1.3487 | 0.9120 | 7.5857 | 0.3350 | 1.2978 |
| LRX | 0.9812 | 0.2582 | 0.0075 | 1.2395 | 0.9738 | 34.5067 | 0.2507 | 1.2320 |
| LSMAD | 0.2788 | 0.0172 | 0.0340 | 0.2960 | 0.2448 | 0.5068 | −0.0168 | 0.2620 |
| LSDM–MoG | 0.9956 | 0.7360 | 0.0566 | 1.7317 | 0.9391 | 13.0127 | 0.6795 | 1.6751 |
| CDASC | 0.9893 | 0.5917 | 0.0641 | 1.5811 | 0.9252 | 9.2315 | 0.5276 | 1.5170 |
| 2S–GLRT | 0.9922 | 0.3169 | 0.0097 | 1.3091 | 0.9824 | 32.5407 | 0.3072 | 1.2994 |
| BFAD | 0.9960 | 0.8330 | 0.0856 | 1.8290 | 0.9104 | 9.7369 | 0.7474 | 1.7434 |
| SSFSCRD | 0.9994 | 0.4556 | 0.0086 | 1.4550 | 0.9908 | 53.0610 | 0.4471 | 1.4465 |
| AED | 0.9959 | 0.5454 | 0.0629 | 1.5413 | 0.9331 | 8.6753 | 0.4825 | 1.4784 |
| SCDF | 0.9988 | 0.5791 | 0.0021 | 1.5779 | 0.9967 | 269.8049 | 0.5769 | 1.5758 |
| Method | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|
| RX | 0.9978 | 0.2247 | 0.0162 | 1.2225 | 0.9816 | 13.8612 | 0.2085 | 1.2063 |
| LRX | 0.9840 | 0.0442 | 0.0010 | 1.0282 | 0.9830 | 45.1625 | 0.0433 | 1.0272 |
| LSMAD | 0.9923 | 0.2735 | 0.0170 | 1.2658 | 0.9753 | 16.0725 | 0.2565 | 1.2488 |
| LSDM–MoG | 0.9992 | 0.6008 | 0.0581 | 1.6000 | 0.9411 | 10.3378 | 0.5427 | 1.5419 |
| CDASC | 0.9985 | 0.3661 | 0.0123 | 1.3646 | 0.9862 | 29.8252 | 0.3539 | 1.3524 |
| 2S–GLRT | 0.9702 | 0.0405 | 0.0003 | 1.0107 | 0.9699 | 135.2632 | 0.0402 | 1.0104 |
| BFAD | 0.9459 | 0.1092 | 0.0184 | 1.0551 | 0.9275 | 5.9332 | 0.0908 | 1.0367 |
| SSFSCRD | 0.9865 | 0.1605 | 0.0181 | 1.1469 | 0.9684 | 8.8850 | 0.1424 | 1.1289 |
| AED | 0.9919 | 0.2947 | 0.0486 | 1.2866 | 0.9433 | 6.0614 | 0.2461 | 1.2380 |
| SCDF | 0.9949 | 0.0420 | 0.0005 | 1.0368 | 0.9944 | 84.7453 | 0.0415 | 1.0363 |
| Method | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|
| RX | 0.9991 | 0.3306 | 0.0337 | 1.3297 | 0.9654 | 9.8166 | 0.2969 | 1.2960 |
| LRX | 0.9886 | 0.1396 | 0.0079 | 1.1282 | 0.9807 | 17.5729 | 0.1317 | 1.1203 |
| LSMAD | 0.9985 | 0.2645 | 0.0281 | 1.2629 | 0.9704 | 9.4273 | 0.2364 | 1.2349 |
| LSDM–MoG | 0.9929 | 0.4163 | 0.0411 | 1.4092 | 0.9518 | 10.1363 | 0.3752 | 1.3681 |
| CDASC | 0.9996 | 0.2190 | 0.0052 | 1.2186 | 0.9944 | 42.0535 | 0.2137 | 1.2134 |
| 2S–GLRT | 0.9869 | 0.2192 | 0.0151 | 1.2061 | 0.9718 | 14.5301 | 0.2041 | 1.1910 |
| BFAD | 0.9939 | 0.8599 | 0.2064 | 1.8538 | 0.7875 | 4.1651 | 0.6534 | 1.6474 |
| SSFSCRD | 0.9977 | 0.3300 | 0.0409 | 1.3278 | 0.9568 | 8.0682 | 0.2891 | 1.2869 |
| AED | 0.9972 | 0.4820 | 0.0353 | 1.4792 | 0.9619 | 13.6584 | 0.4467 | 1.4439 |
| SCDF | 0.9999 | 0.4060 | 0.0019 | 1.4059 | 0.9980 | 211.9936 | 0.4041 | 1.4041 |
| Dataset | Dimension | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|---|
| Synthetic data | Dimension 1 | 0.9905 | 0.7097 | 0.0300 | 1.7002 | 0.9605 | 23.6893 | 0.6797 | 1.6702 |
| Dimension 2 | 0.9721 | 0.4955 | 0.0307 | 1.4676 | 0.9413 | 16.1221 | 0.4648 | 1.4368 | |
| Dimension 3 | 0.9672 | 0.4952 | 0.0251 | 1.4624 | 0.9421 | 19.7153 | 0.4700 | 1.4373 | |
| Dimension 4 | 0.9997 | 0.6906 | 0.0232 | 1.6903 | 0.9765 | 29.7763 | 0.6674 | 1.6671 | |
| Final result | 0.9982 | 0.4851 | 0.0006 | 1.4833 | 0.9976 | 844.0422 | 0.4845 | 1.4828 | |
| Urban | Dimension 1 | 0.9930 | 0.7249 | 0.0395 | 1.7179 | 0.9534 | 18.3303 | 0.6854 | 1.6783 |
| Dimension 2 | 0.9771 | 0.5781 | 0.0527 | 1.5552 | 0.9244 | 10.9608 | 0.5253 | 1.5024 | |
| Dimension 3 | 0.9914 | 0.6612 | 0.0666 | 1.6526 | 0.9248 | 9.9258 | 0.5946 | 1.5859 | |
| Dimension 4 | 0.9982 | 0.7068 | 0.0271 | 1.7050 | 0.9712 | 26.1143 | 0.6797 | 1.6780 | |
| Final result | 0.9988 | 0.5791 | 0.0021 | 1.5779 | 0.9967 | 269.8049 | 0.5769 | 1.5758 | |
| MUUFL Gulfport | Dimension 1 | 0.9903 | 0.0737 | 0.0027 | 1.0640 | 0.9876 | 27.6608 | 0.0710 | 1.0613 |
| Dimension 2 | 0.9896 | 0.0756 | 0.0027 | 1.0652 | 0.9869 | 28.1420 | 0.0729 | 1.0625 | |
| Dimension 3 | 0.9910 | 0.0882 | 0.0029 | 1.0792 | 0.9881 | 29.9237 | 0.0852 | 1.0762 | |
| Dimension 4 | 0.9767 | 0.4696 | 0.0929 | 1.4463 | 0.8837 | 5.0532 | 0.3767 | 1.3534 | |
| Final result | 0.9949 | 0.0420 | 0.0005 | 1.0368 | 0.9944 | 84.7453 | 0.0415 | 1.0363 | |
| Chikusei | Dimension 1 | 0.9999 | 0.6345 | 0.0156 | 1.6344 | 0.9843 | 40.7601 | 0.6190 | 1.6189 |
| Dimension 2 | 0.9998 | 0.5688 | 0.0129 | 1.5686 | 0.9869 | 43.9322 | 0.5558 | 1.5556 | |
| Dimension 3 | 0.9997 | 0.5759 | 0.0130 | 1.5756 | 0.9867 | 44.2998 | 0.5629 | 1.5627 | |
| Dimension 4 | 0.9973 | 0.6202 | 0.0799 | 1.6175 | 0.9174 | 7.7616 | 0.5403 | 1.5376 | |
| Final result | 0.9999 | 0.4041 | 0.0016 | 1.4040 | 0.9983 | 249.2678 | 0.4024 | 1.4024 |
| Dataset | Method | AUC(D,F) | AUC(D,τ) | AUC(F,τ) | AUCTD | AUCBS | AUCSNPR | AUCTDBS | AUCODP |
|---|---|---|---|---|---|---|---|---|---|
| Synthetic data | SCDF–noTNN | 0.9975 | 0.4849 | 0.0008 | 1.4824 | 0.9967 | 616.8351 | 0.4841 | 1.4816 |
| SCDF–TNN | 0.9982 | 0.4851 | 0.0006 | 1.4833 | 0.9976 | 844.0422 | 0.4845 | 1.4828 | |
| Urban | SCDF–noTNN | 0.9972 | 0.6562 | 0.0081 | 1.6534 | 0.9891 | 81.0583 | 0.6481 | 1.6453 |
| SCDF–TNN | 0.9988 | 0.5791 | 0.0021 | 1.5779 | 0.9967 | 269.8049 | 0.5769 | 1.5758 | |
| MUFL Gulfport | SCDF–noTNN | 0.9921 | 0.0256 | 0.0004 | 1.0176 | 0.9916 | 57.2450 | 0.0251 | 1.0172 |
| SCDF–TNN | 0.9949 | 0.0420 | 0.0005 | 1.0369 | 0.9944 | 84.7453 | 0.0415 | 1.0363 | |
| Chikusei | SCDF–noTNN | 0.9986 | 0.3551 | 0.0033 | 1.3537 | 0.9953 | 107.5117 | 0.3518 | 1.3504 |
| SCDF–TNN | 0.9999 | 0.4041 | 0.0016 | 1.4040 | 0.9983 | 249.2678 | 0.4024 | 1.4024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, P.; Li, H.; Song, J.; Wang, D.; Zhang, J.; Zhou, H. Spectral–Spatial Complementary Decision Fusion for Hyperspectral Anomaly Detection. Remote Sens. 2022, 14, 943. https://doi.org/10.3390/rs14040943
Xiang P, Li H, Song J, Wang D, Zhang J, Zhou H. Spectral–Spatial Complementary Decision Fusion for Hyperspectral Anomaly Detection. Remote Sensing. 2022; 14(4):943. https://doi.org/10.3390/rs14040943
Chicago/Turabian StyleXiang, Pei, Huan Li, Jiangluqi Song, Dabao Wang, Jiajia Zhang, and Huixin Zhou. 2022. "Spectral–Spatial Complementary Decision Fusion for Hyperspectral Anomaly Detection" Remote Sensing 14, no. 4: 943. https://doi.org/10.3390/rs14040943
APA StyleXiang, P., Li, H., Song, J., Wang, D., Zhang, J., & Zhou, H. (2022). Spectral–Spatial Complementary Decision Fusion for Hyperspectral Anomaly Detection. Remote Sensing, 14(4), 943. https://doi.org/10.3390/rs14040943