1. Introduction
Many coastal regions around the world are facing an increased exposure to flood hazard and related losses because of the growing population and economy. This situation is further exacerbated by the sea level rise and ground subsidence [
1]. The intertidal zone, the tidally flooded area of coastal region, is exposed to many land and oceanic processes. Clearly, the ongoing sea level rise primarily impacts the intertidal zone by permanently flooding and changing the hydrodynamics [
2]. Our understanding and modeling of the relevant hydrodynamic processes in the intertidal region require detailed knowledge of its topography, which remains very poor worldwide due to very high costs associated with necessary field campaigns and instrumentation [
3].
Spaceborne remote sensing offers a promising alternative for mapping the intertidal topography [
4,
5]. Among the various methods, the waterline method is one of the most widely used [
6,
7,
8,
9]. In this approach, the horizontal position of the land-water boundary (i.e., shoreline of a coast) is determined from remotely sensed images using image processing techniques. When the horizontal position of this shoreline is combined with the independent knowledge of the water level at this location, at the time of image acquisition, the relative height of the shoreline can be inferred. Replicating this process over a range of tidal water levels gives an estimation of the topography between highest-water (generally observed at high tide of spring tide) and the lowest-water (generally observed at low tide of spring tide) shorelines. Various applications of this method have been attempted, including the monitoring of coastline changes [
10], estimation of sediment transport [
11], and data assimilation in a coastal morphodynamic model [
12]. At larger scale, Bishop-Taylor et al. developed an intertidal digital elevation model (DEM) for Australia coast at 25 m resolution using a relative intertidal extent model developed from 30 years of Landsat archive and global tidal modeling [
13,
14].
The use of Synthetic Aperture Radar (SAR) imagery is quite common to infer the shoreline to use with waterline method (e.g., [
6]). The reason behind using SAR imagery is its ability to work day or night including under cloudy conditions. Another reason is the ability to automate or semi-automate the shoreline detection from SAR imagery [
15,
16,
17].
The application of multi-spectral imagery can be similarly useful in waterline method. Typical shoreline detection methods rely on near-infra-red (NIR) spectrum since it is absorbed by water and gets reflected by vegetation and dry soil [
18]. The methods based on NIR either use the band directly (e.g., [
19]) or use indices developed from the conjunction of other bands. For example, the normalized difference vegetation index (NDVI) enhances the water feature with red band (e.g., [
20]), the normalized difference water index (NDWI) uses the green band (e.g., [
21]). An updated version of NDWI, known as modified normalized difference index (MNDWI) uses the shortwave infra-red (SWIR) to overcome noise issue [
22]. It is generally straightforward, and a common practice, to manually digitize the shorelines from NIR band or aforementioned indices for application of the waterline method. For example, Zhao et al. [
8] mapped the intertidal topography of Yangtze Delta using on-screen digitization of Landsat imagery and Xu et al. [
23] manually digitized Landsat imagery to study the seasonal intertidal topography variation along the coast of South Korea. Using a semi-automated approach based on MNDWI, Tseng et al. [
9] reconstructed the time-varying tidal topography from a 22-year timeseries of Landsat imagery. These semi-automated approaches are typically calibrated for a particular region, or a single tile. Manual digitization or parameter tuning can become overwhelming for large number of tiles over a broad area [
5]. Thus, the recent high-resolution spectral imagery with short revisit period (e.g., Sentinel-2) or radar missions (e.g., Sentinel 1) which are typically distributed in small tiles is generally not suited for application of manual or semi-automated waterline method over broad areas.
One of the major challenges to automatically identify the shoreline is the need to estimate a threshold (i.e., binary classification) to discriminate water from other. Since the threshold values usually vary with illumination, viewing angle and altitude [
24], selecting a threshold can be time-consuming and subjective. Moreover, applying a single threshold value for all images can lead to wrong shoreline detection (e.g., [
25]). Among recent advancement in shoreline extraction from spectral images, Zhang et al. [
26] proposed a dynamic threshold method for the classification of from Landsat-8 OLI water index images, particularly suitable for lakes. Bergmann et al. [
27] proposed a semi-automated processing of multi-spectral imagery from PROBA-V satellite based on the water pixel classification method of Pekel et al. [
28]. They also demonstrate the waterline method by combining the water level derived from nearby tide gauges—producing a DEM with typical accuracy of 1 to 2 m, at 100 m resolution using only a handful of PROBA-V acquisitions.
The present paper updates the method presented by Bergmann et al. [
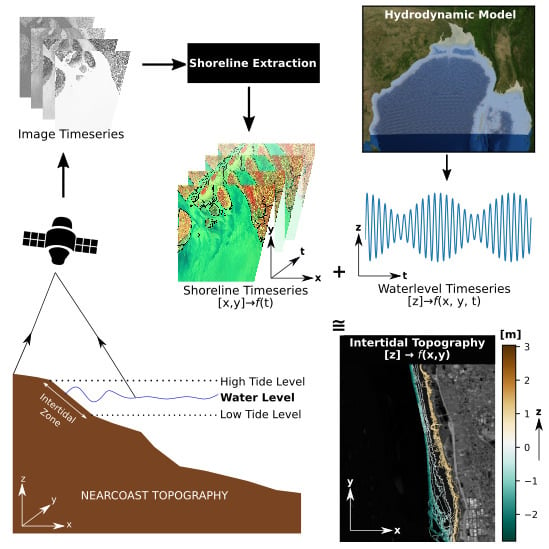
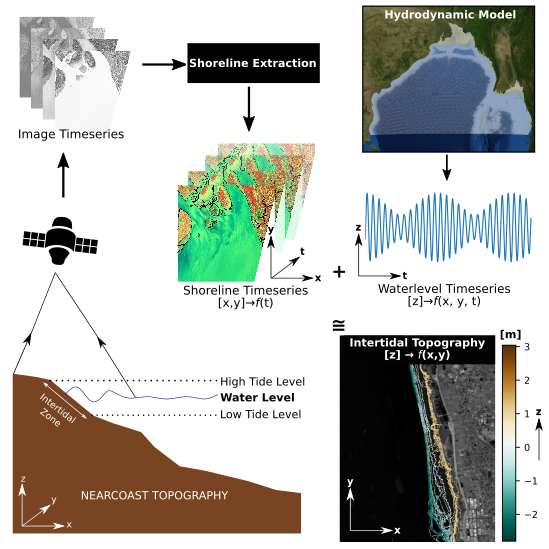
27], with several key advances. First, our method allows the use of high-resolution spaceborne imagery dataset. Here we demonstrate an application using Sentinel 2 imagery at 10 m resolution. This dataset is one order magnitude higher in resolution compared to 100 m in PROBA-V images. To the best of our knowledge, this freely available satellite dataset has never been used for deriving an intertidal DEM. Second, our method is fully automated and generic enough to be applicable to shorelines ranging from sandy to muddy, including the ability to resolve fine estuarine network and narrow creeks. Finally, our method combines the application of remote-sensing (used to infer the horizontal position of the waterlines at various phases of the tidal cycle) and high-resolution hydrodynamic modeling (used to vertically reference these waterlines) as suggested by [
7]. Removing the requirement of any ancillary in situ data makes our method lightweight. As a test case, we present here an application of our method to infer a DEM of the near-shore intertidal zone over the whole Bengal delta.
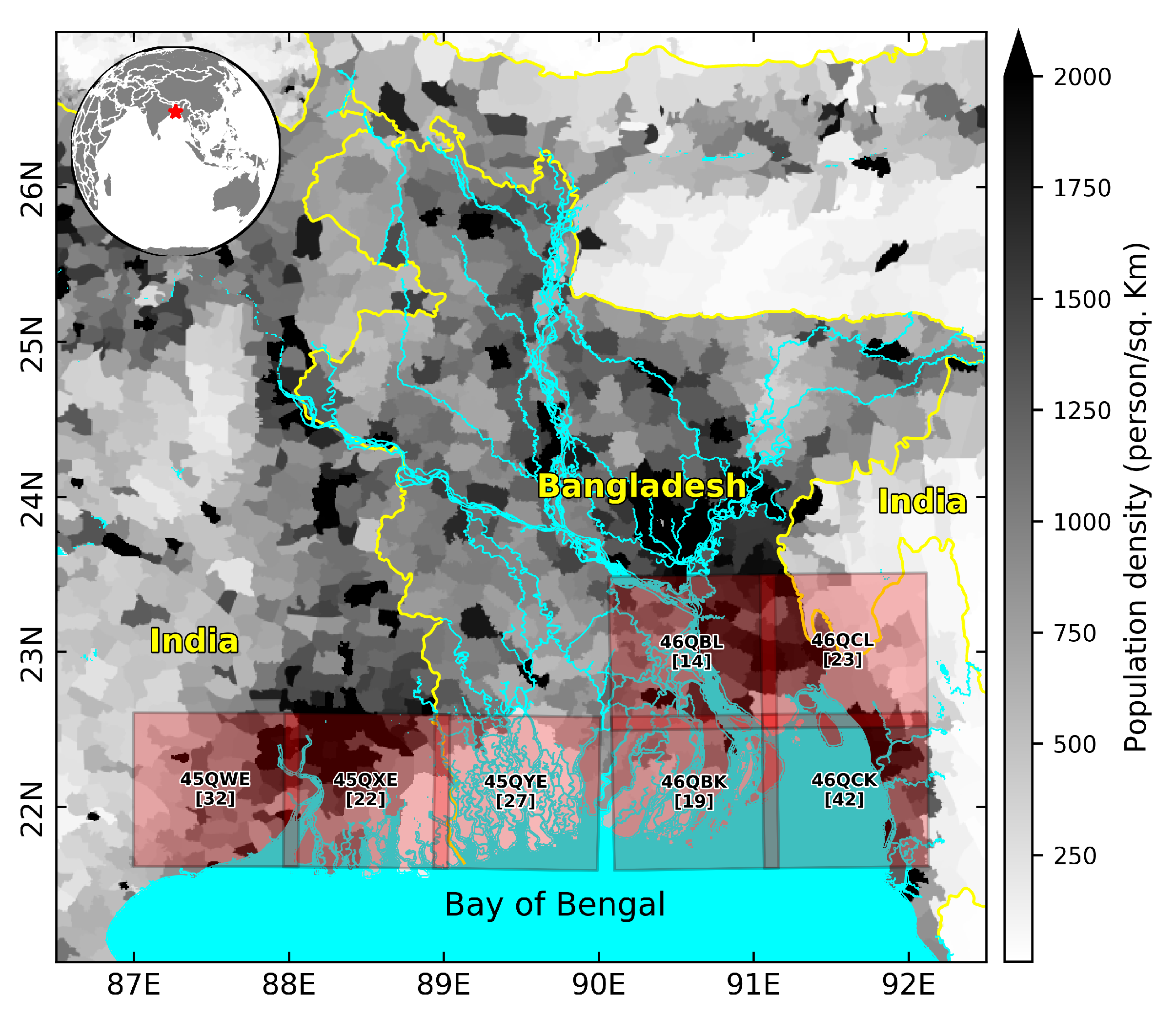
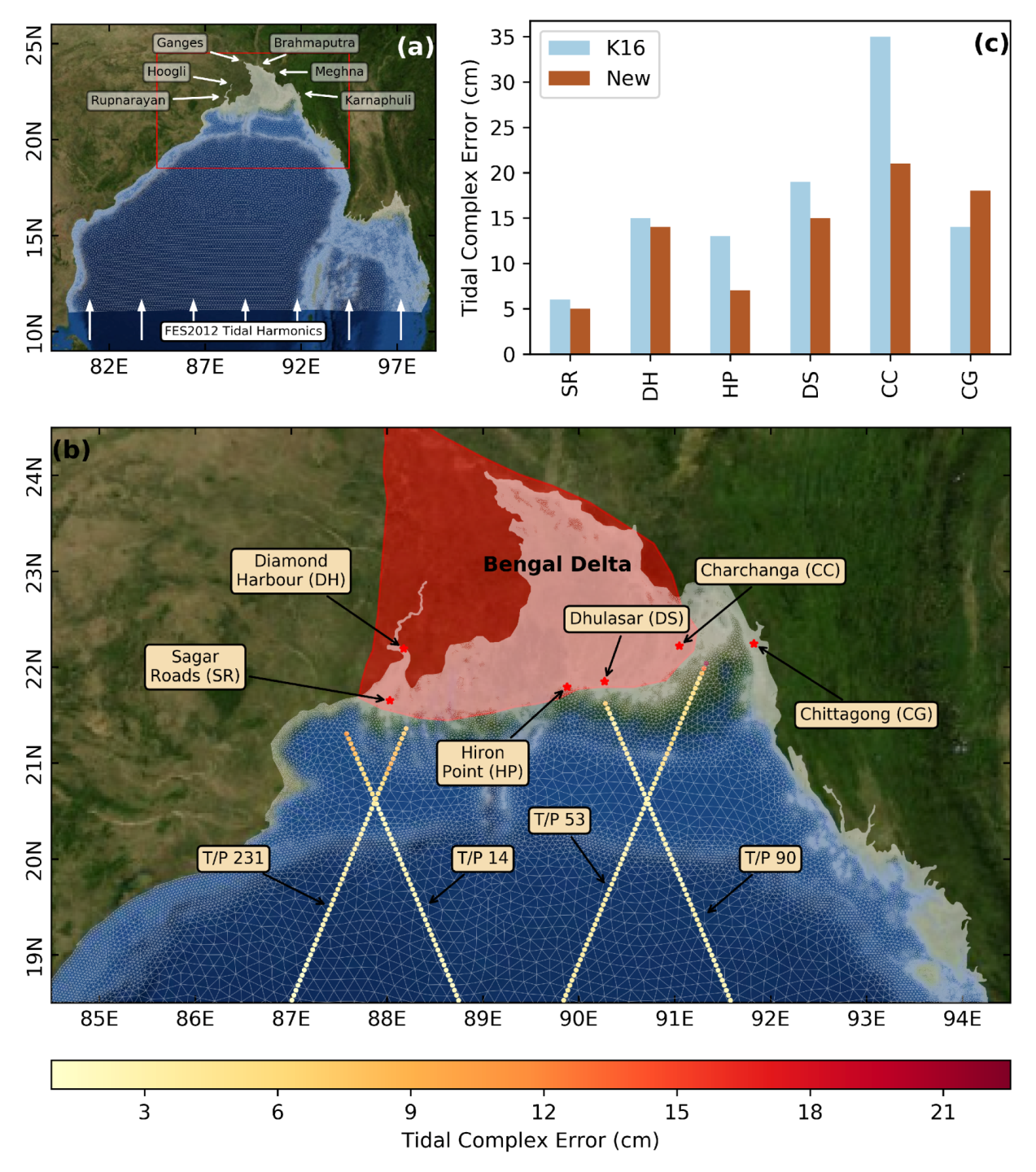
The coast of Bengal delta (
Figure 1), across Bangladesh and India, is a well-known hotspot of coastal vulnerability. About 150 million people live in this region, characterized by a flat topography, with elevation typically inferior to 4 m above mean sea level (MSL) [
29]. The near-shore ocean is characterized by a broad and shallow shelf with a mild slope in the order of 1/1000 to 1/5000, and a macro-tidal regime, with a tidal range in excess of 5 m in the North-Eastern part of the coast. The region is also prone to frequent tropical cyclones—on average, one major event in three years [
30]. In the recent decades, three particularly devastating cyclones made landfall in this region, notably Gorky (1991), Sidr (2007), and Aila (2009) claiming about 140,000, 3400, and 190 lives, respectively. Due to the combination of low topography and high population, the coastal districts of Bengal delta are generally very prone to cyclone-induced flooding and associated loss of lives and assets [
31].
The modeling of storm surge dynamics over this region is a challenging task for the scientific community. State-of-the-art numerical models can reproduce the estimated surge height, but they generally fail to reproduce the spatio-temporal evolution of the flooding [
30]. Inaccurate and outdated representation of the near-shore bathymetry and land topography is identified as one of the most important factors that prevent from accurately reproducing the tidal dynamics, the cyclone surges characteristics as well as the coastal inundation patterns [
30,
33]. Using a bathymetry dataset derived from a large ensemble of digitized in situ hydrographic surveys, Krien et al. [
29] significantly improved the representation of tidal hydrodynamics in the Bengal delta region. This dataset, however, essentially consists of point-wise soundings from shipborne surveys, which do not cover the very shallow-water zones (shallower than 2 m below MSL). This means that the whole intertidal area, which can be quite broad in this very flat region (up to several kilometers wide), are left void of up-to-date topographic data. However, it is well known that the knowledge of the intertidal topography is particularly important to realistically model the effect of wave set-up during storms and cyclones (e.g., [
34]).
The Bengal coast is also characterized by erosion and accretion of the shoreline that manifests at various timescales ranging from days to decades [
35]. These changes are particularly prominent in the mouth of Meghna estuary where the combined flow of Ganges, Brahmaputra, and Meghna is discharged. The large sediment discharge accompanies the runoff during the monsoon and then gets spread by far-reaching tidal currents as well as extreme events such as riverine floods and tropical cyclones [
35,
36]. Because of this dynamic nature, it is not feasible to perform repeated, extensive in situ hydrographic surveys over this extended deltaic region, thus making it a very interesting test case for applying our methodology.
The aim of this study is three-fold. First, we developed an automated procedure to extract waterlines from Sentinel 2 imagery. Second, we vertically referenced those shorelines using a hydrodynamic model of the area. This allows obtaining an intertidal topography. Third, we validated the resulting topography against in situ bathymetric observations harvested in a key-region of the Bay of Bengal. We present our algorithm to extract the shoreline in
Section 2, which is followed by a description of our hydrodynamic modeling framework in
Section 3. The resulting DEM over Bengal delta and its validation based on two independent in situ sounding dataset are presented in
Section 4. Finally, we discuss our results and conclude our work in
Section 5 and
Section 6, respectively.
2. Shoreline Detection with Sentinel-2 Imagery
Sentinel-2 project was launched by European Space Agency to acquire high-resolution multi-spectral images with short revisit frequency. It comprises two satellites—Sentinel-2A and Sentinel-2B, successfully launched in 2015 and 2017. The objective of these missions is to provide long-term research-quality acquisition of land surface monitoring products. For the monitoring of water bodies, the use of Sentinel-2 is very appealing due to its open-access nature, high resolution (10 m), and short revisit period (about 10 days). Sentinel-2 satellites acquire data over 13 spectral bands—four bands (blue, green, red, near infra-red—NIR) at 10 m resolution and six other bands (including shortwave infra-red—SWIR) at 20 m resolution. Because of the large dataset size, Sentinel-2 products are distributed as tiles of 1 × 1 degree. We have used the Copernicus Sentinel-2 data processed at level 2A by CNES at Theia Land data center (
https://theia.cnes.fr). The data is provided in separate GeoTIFF arrays for each of the spectral bands. All the individual tiles had been corrected from the atmospheric and adjacency effects, along with the detection of clouds and their shadows using MAJA processing chain [
37].
2.1. Pre-Processing of the Dataset
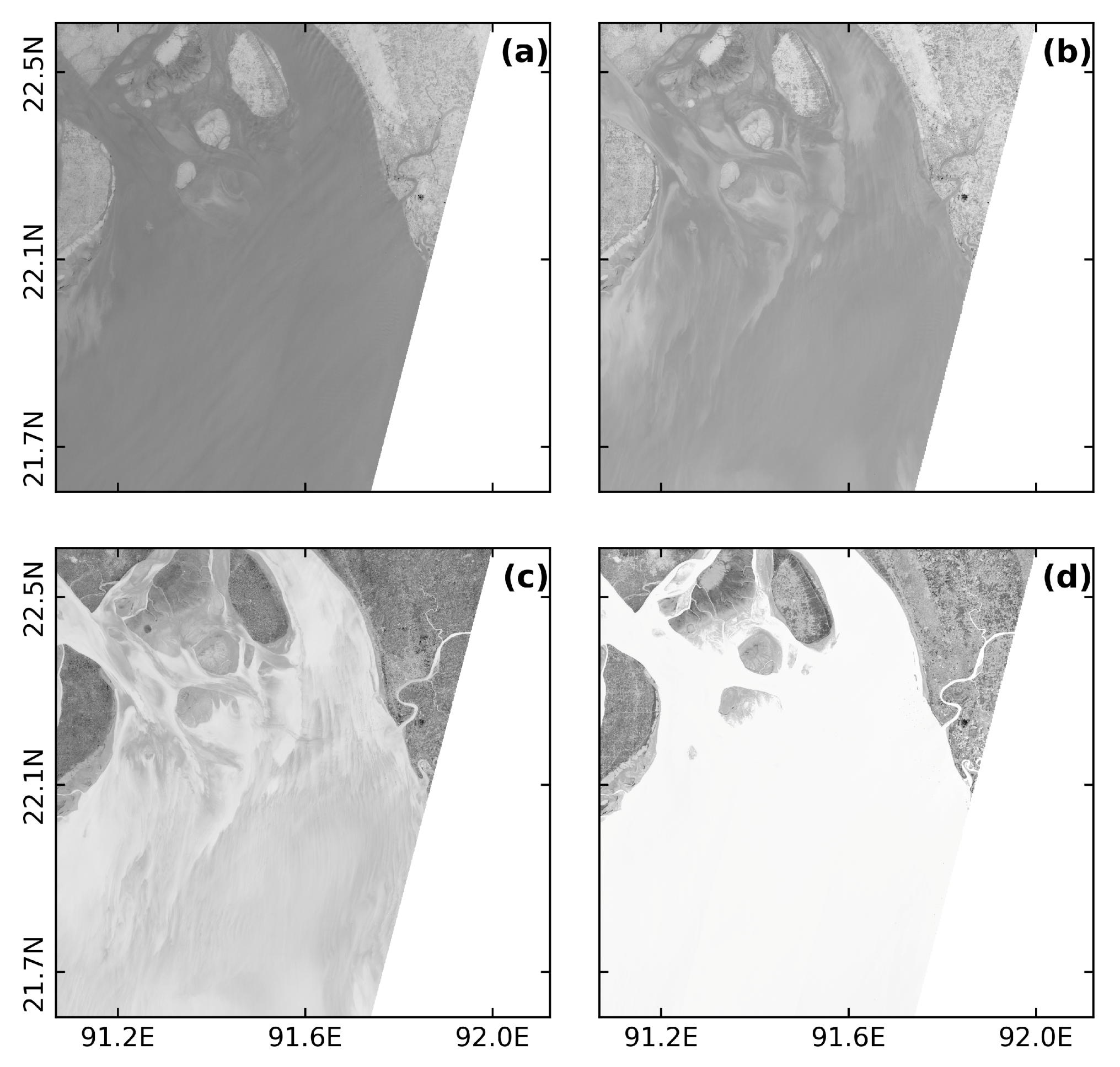
For detection of shoreline, we have used the B2, B4, B8 and B11 bands, with the spectral properties provided in
Table 1. We have selected images from the archive avoiding instances with prominent cloud cover (typically less than 10%). The images were already orthorectified and georeferenced. We have considered about three years of archive, from January 2016 to October 2018. This temporal selection encompasses on average 75 individual Sentinel-2 passes. Finally, we have considered seven tiles fully covering the coastal region of the Bengal delta. With 14 to 42 individual frames per tile, this selected dataset encompasses a large fraction of the observable tidal range. The coverage of the selected tiles, and the corresponding number of frames per tile are displayed in
Figure 1. The corresponding satellite and timestamp information of the images are provided in
Supplementary Tables S1–S7.
As mentioned in the previous section, our shoreline analysis approach is essentially an upgrade of the methodology presented in [
27]. We updated their algorithm to make it compliant with the 10 m resolution of Sentinel-2 imagery, applicable to smaller tiles, and in a fully automated fashion. We consider the surface reflectance products identified by the prefix FRE (Flat Reflectance), corrected from both atmospheric and land slope effects.
Each band data file is coded as a 16-bit integer. The original reflectance value is found from dividing this integer dataset with 10,000. The pixels which were out of the field-of-view of the satellite pass are coded as
.
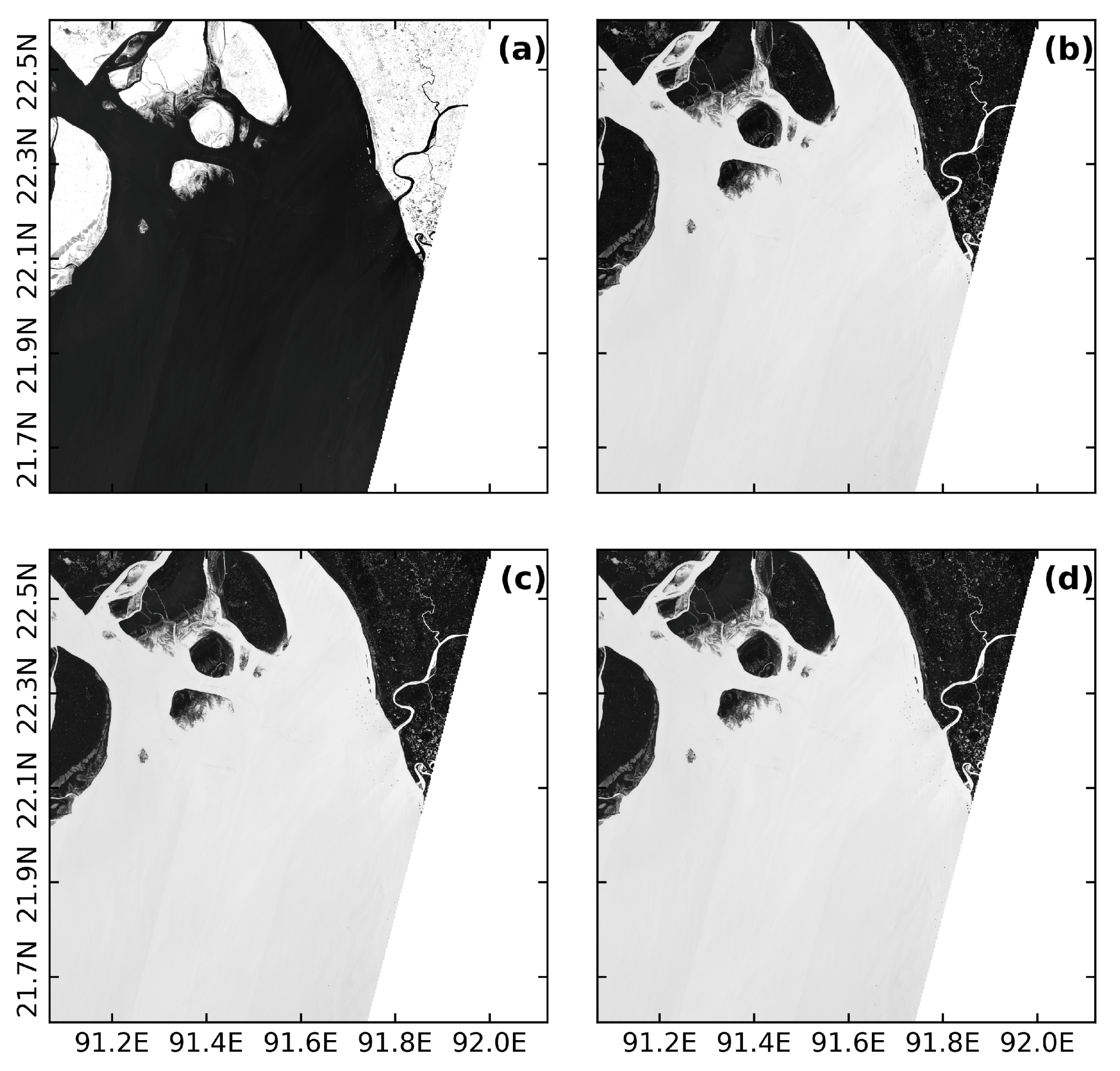
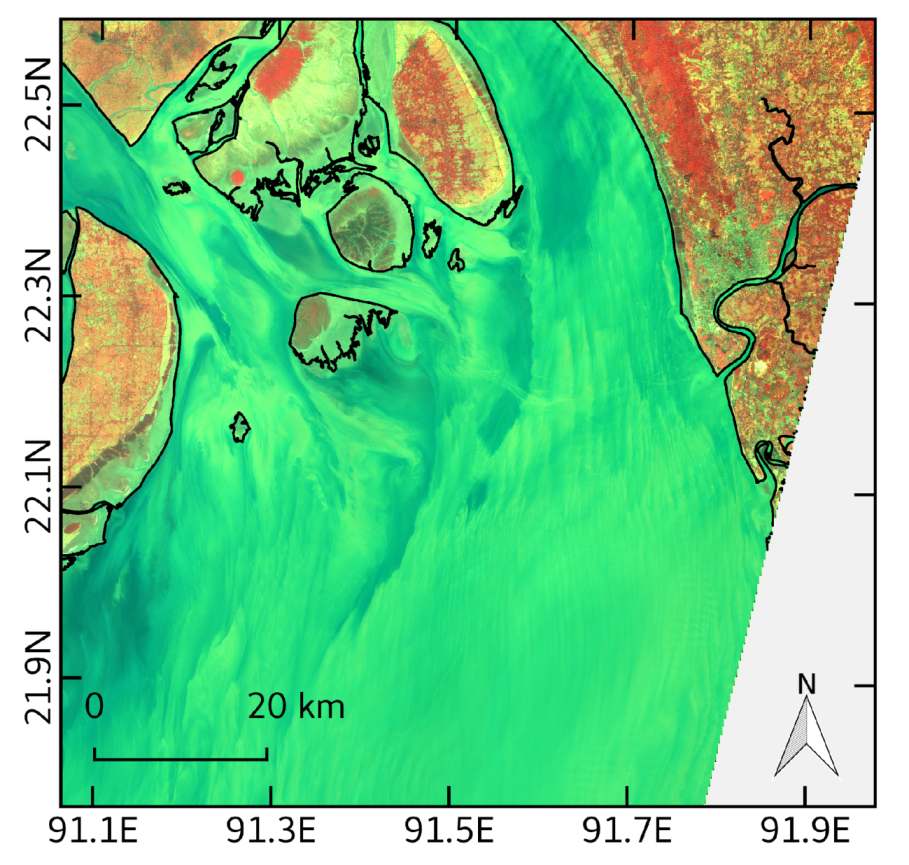
Figure 2 shows a sample of the Sentinel-2 bands used in this study.
Naturally, the illumination conditions vary from one scene to another for a given tile. On several scenes, we also noticed the presence of a few pixels with very high reflectance values. While we could not confirm the reason, at all instances these pixels correspond to some form of slanted roofs that might have induced powerful sun glint. To be consistent along the time series of the images, and to make our algorithm robust, we applied a pre-processing of the B11 band to remove these artificially bright pixels. We do so by capping the values at mean plus one standard deviation (std) on the upper side, i.e., restricting them within [0, mean+1*std]. Once the pre-processing of the B11 band is done, we apply a normalization of the dataset to [0, 1]. Finally, we use a nearest-neighbor approach to resample B11 band to 10 m from its original 20 m resolution. The B2, B4 and B8 bands are also normalized to [0, 1] for further processing.
In our approach, the B11 band serves as a transparency channel, the so-called alpha band. A synthetic red-green-blue-alpha space is constructed using B2, B4, B8 and B11 bands according to Equation (
1).
The subscript
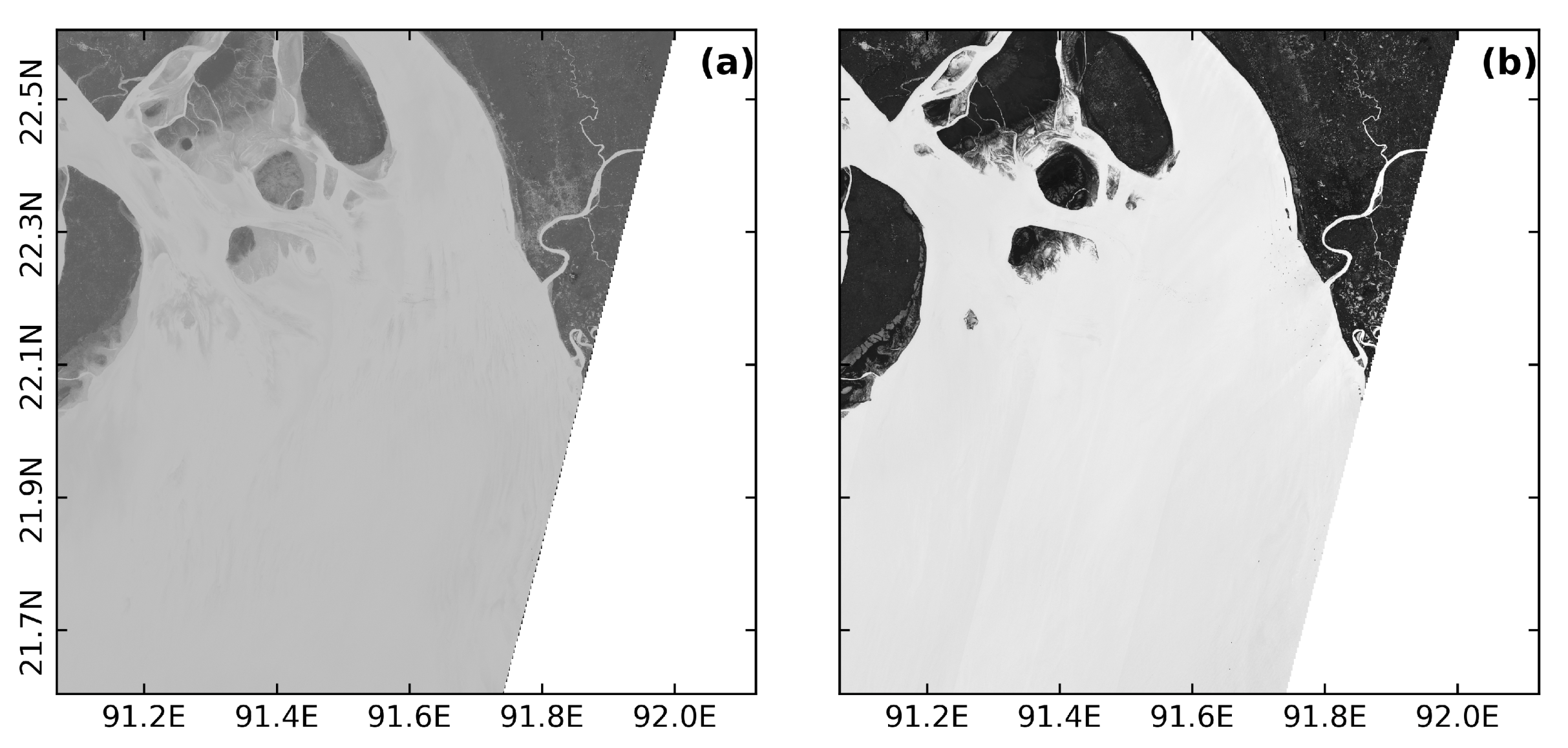
refers to the pre-processed and normalized bands of the previous step. This allows taking the full advantage of land/water contrast captured in the B11 band while retaining the high-resolution information from the other three bands (
Figure 3).
This synthetic RGBa (red-green-blue-alpha) bands in
Figure 3 are converted to hue, saturation and value (HSV) color space following [
28]. Among these three, we discard the saturation, which is essentially the intensity of the hue. This separation makes our algorithm indifferent to the various illumination conditions which are bound to happen for a multi-year archive. Only value and hue channels presented in
Figure 4 are retained during the subsequent procedure.
2.2. Coarse Water Mask
One of the essential steps in [
27] is the preparation of a coarse water mask—only once for a given region—typically by hand, to roughly separate the water from land areas. This step allows guiding the subsequent accurate discrimination of water and land pixels along the land-water interface area. Preparing such a mask manually for a large area dataset such as our test case could be tedious. To automate the preparation of this mask we used the fact that B11 band consistently shows a very distinct contrast between land and water pixels. First we normalize the multiple acquisitions of B11 band, and merge all images by taking a pixel-by-pixel average. The first advantage of this merging is the filtering of any artefact that may be present in individual B11 band images (typically: localized stripes of under-illuminated pixels), thus retaining a clear separation between land and water with reduced noise. The second advantage is the full coverage of the tile by the accumulation of observed pixels. Each tile is essentially a clipped version of a continuous image along the swath of the satellite, thus yielding individual tiles which are not always fully covered during a pass (i.e., missing values). By combining all the available images, the presence of missing values is avoided.
To generate the water mask itself, we apply a threshold based on the standard deviation of the merged band, using Equation (
2).
Here is the normalized and merged B11 band, std() is the standard deviation of the and is a scalar factor. The output of this operation—mask—is a 2D array with water (1) and land (0) coarsely classified. For our application, we found that an of 0.5 is suited for all the tiles. However, we recommend adjusting the value if needed, especially for tiles covering environments where the relative number of water pixels is very low (e.g., inland water body mapping).
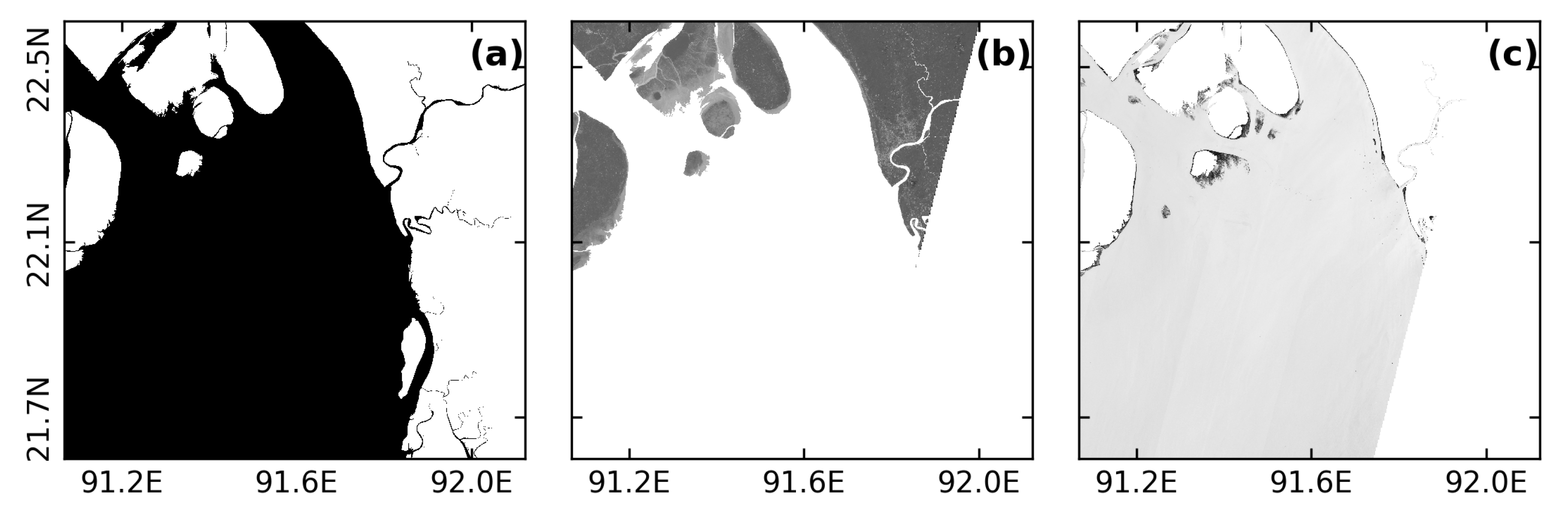
The mask is further refined by application of a blob-removal procedure. For pixels identified as water (mask value of 1), any pixel blob with size smaller than 10,000 is replaced by land mask value (0). On the other hand, for the pixels identified as land (0), any blob with size smaller than 50,000 is replaced by water mask values (1). This process essentially removes the noise and results in a cleaner coarse segmentation of land and water. Once this final cleaning is done, we obtain the water mask. This process is done only once for a given set of images. One example of such mask for tile #46QCK is presented in
Figure 5a.
2.3. Shoreline Extraction
The basic principle of our shoreline extraction algorithm is to discriminate the pixels at the land-water interface guided by the pixel values of land and water zones coarsely separated by the above-defined coarse water mask. To identify the land-water interface, we first apply our water mask presented in
Figure 5a to the hue and value channels. This mask is applied inversely on the hue channel (roughly retaining the land pixels,
Figure 5b) and directly on the value channel (roughly retaining the water pixels,
Figure 5c). Median and standard deviation are calculated for these masked channels, which are subsequently used to apply as a threshold on the images as defined by Equation (
3).
Here the and subscript indicate the channel type, is the original value of the channel before masking, (for Black–White) is the resulting binary channel. T and are the median and standard deviation, respectively. ¬ indicates the logical NOT operation.
Essentially Equation (
3) separate land and water pixels at the interface by taking a window around the median of the inversely masked hue channel and of the masked value channel. The size of the window is controlled by
and
for hue channel and value channel, respectively. Lower scaling factor results in a stricter window of threshold, and vice versa. After several trials and visual inspection of the shorelines, we selected 0.5 and 3.0 for
and
respectively. These values are close to the values used by [
27] for PROBA-V (0.4 and 5.0 for
and
respectively). The
and
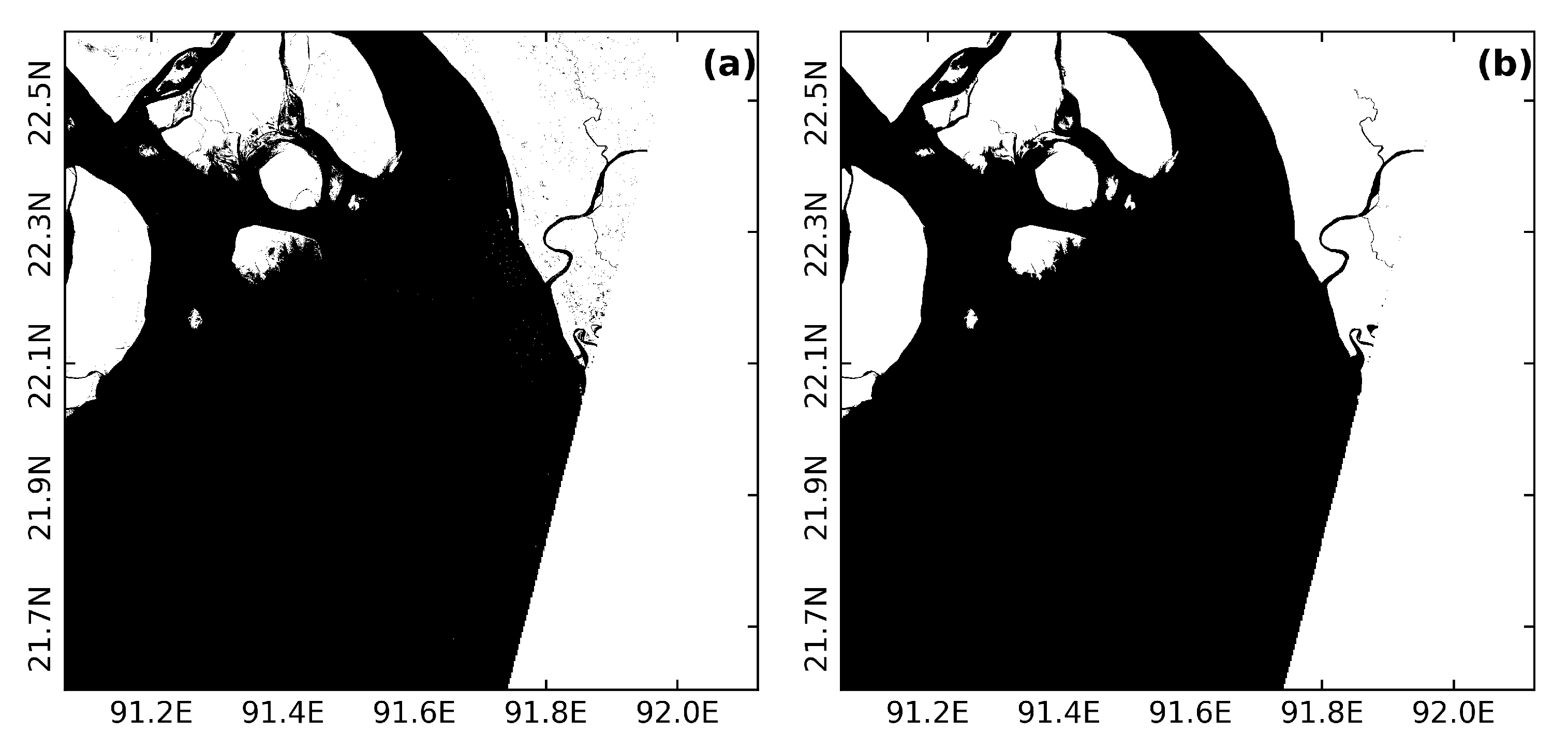
channels are then AND-connected to obtain the final separation of land-water interface. The result of this operation is presented in
Figure 6a.
At the final step, small-scale features are removed based on their size. We discard all water features smaller than 10,000 pixels in size inside land area; similarly, we remove all land features smaller than 10,000 pixels. These correspond to an area of 1 km
. This cleaning essentially removes all ships detected in the ocean as well as the smallest ponds detected inland. As a consequence of this cleaning, certain small-scale features such as coastal sandbars are also removed in our analysis, which are visible during low tide but submerged at high tide. The resulting image after our blob-removal procedure is presented in
Figure 6b.
The final step of identifying the shoreline is applying an edge detector on the classified land-water binary image. To do this, the blob-removed binary water map obtained in the previous step is convoluted with a 3 × 3 Laplacian kernel following Equation (
4).
Here,
is the clean binary water map,
is the extracted shoreline map and
K is the 2D kernel matrix defined as:
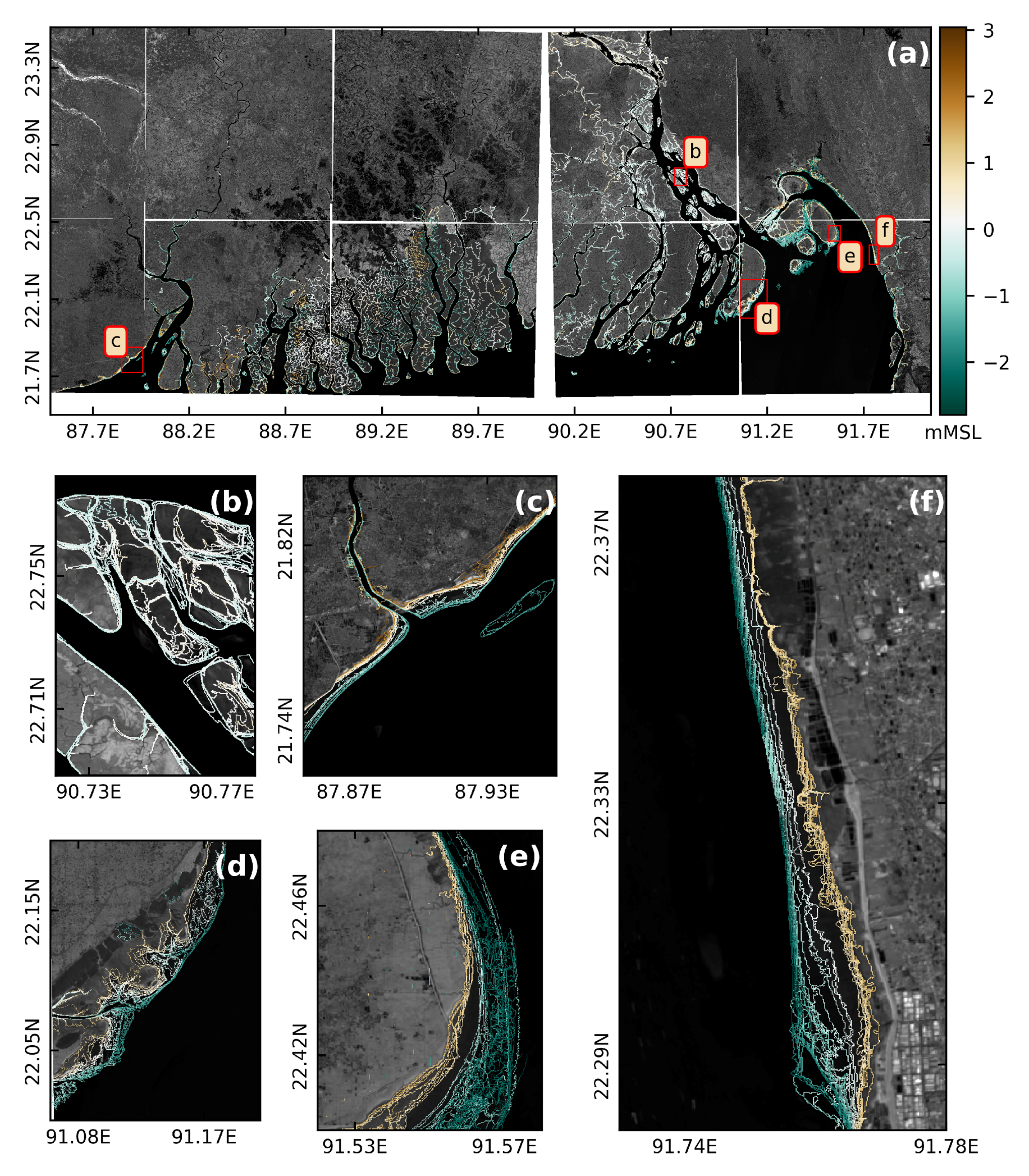
The application of this edge detector in binary 2D space results in a raster image where only the pixels forming the water/land interface are left. The location of the shoreline is then defined at the center of these pixels and converted to longitude-latitude coordinates from the native UTM projection of the satellite images. An example of the resulting shoreline is shown in
Figure 7.
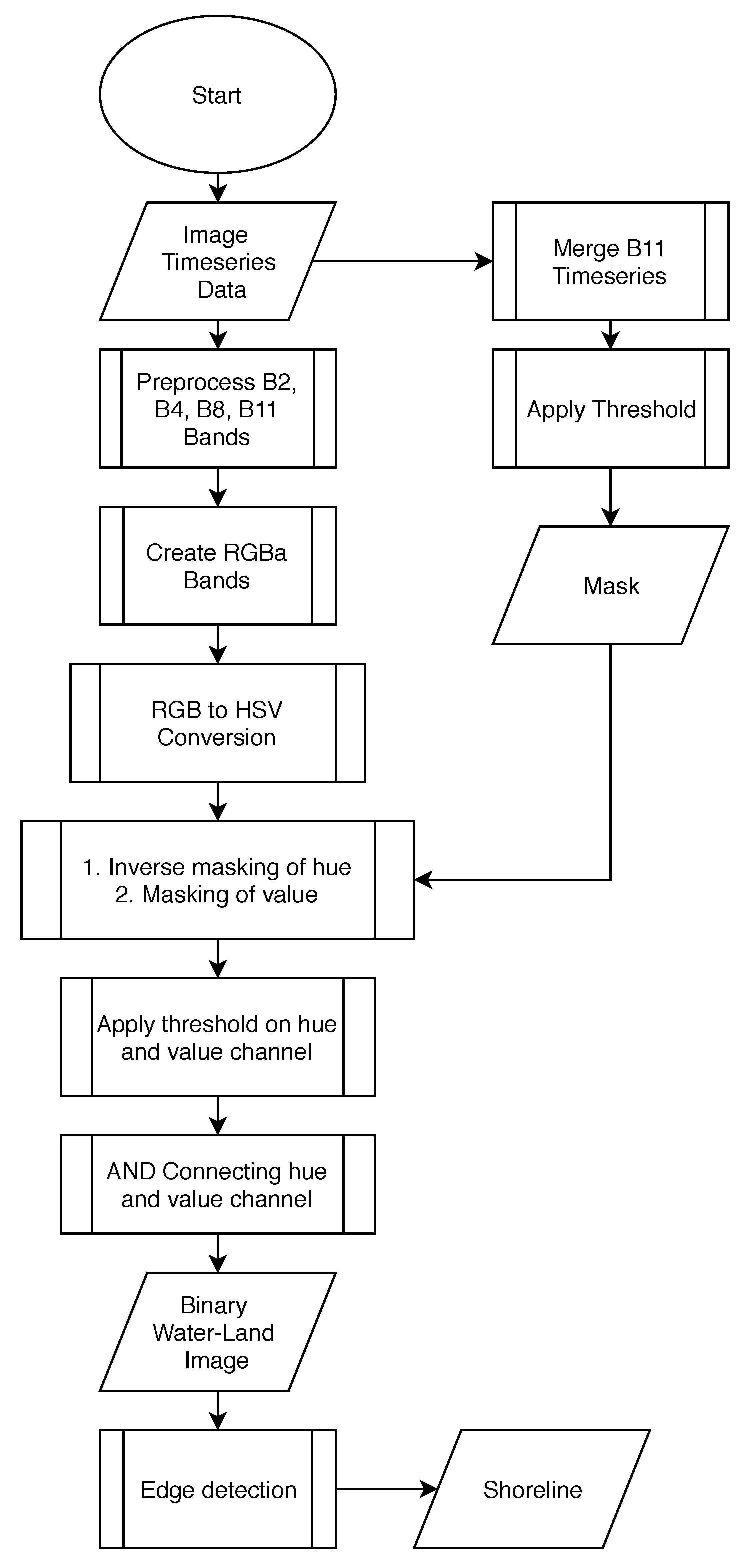
This aforementioned procedure is summarized in the flowchart shown in
Figure 8. We apply this algorithm over the time series of selected Sentinel-2 images. Eventually a manual cleaning of the resulting water lines is performed to remove large, disconnected water bodies (particularly for tile #45QXE and tile #45QYE at their northern edge), which were too large to be removed using our blob-removal procedure. In most cases these disconnected water bodies are large shrimp farms. The vertical referencing of this timeseries of shorelines is described in the following section.
5. Discussion
Our algorithm essentially builds on a well-known and tested methodology [
6,
27]. However, our method uses a new generation of satellites and is computationally lighter and automated. We also demonstrated the utility of a good hydrodynamic modeling framework, instead of depending on ancillary in situ data. The application of our algorithm to the imagery archive of Sentinel-2 over the Bengal delta resulted in a large-scale high-resolution intertidal DEM, encompassing the whole delta. The large area of the region we considered, of order 600,000 km
, did not induce any computational issue thanks to the lightness of the proposed procedure. Typically, it takes 6–7 h on a laptop computer to process the Sentinel-2 archive and generate the DEM covering such an extended region. Based on both navy soundings and dedicated primary observations, we could conclude that our DEM has an accuracy order of 1 m, which is in line with the state-of-the-art estimates produced in this region or in similar environments [
14,
27].
There are some assumptions in this approach which should be kept in mind. We assume that the water-level changes are driven by oceanic tide only. To validate our assumption, we replaced our tidal atlas by an ocean model hindcast, accounting for the atmospheric forcing (wind speed and air pressure) in addition to the tidal forcing. This did not appreciably change our resulting DEM, thus not shown here. The reason behind this is that the selection of cloud-free images typically dictates fair weather conditions associated with minor non-tidal sea level variability. However, in other coastal regions of the world ocean, where the tidal range is weaker than in ours and/or where the effects of atmospheric variability on sea level become prominent, it may be required to adopt this kind of more sophisticated approach to make the most of Sentinel-2 and similar imagery products.
For vertical referencing using the model derived tidal water level, we co-located each shoreline pixel to nearest always-wet hydrodynamic model node. This assumes that the water-level gradient is negligible in the scale of our hydrodynamic model (typically 300 m).
Additionally, our approach essentially assumes that the bathymetry of the intertidal zone is stationary over the duration of the imagery archive, which is rather small (about 3 years) in our case. However, in the case of coastal zones with prominent erosion/accretion, the long-term morphological changes might significantly distort the resulting DEM, which would result in waterlines artificially stretched, clubbed, and/or intersecting one another. In such circumstances a methodology more refined than ours may be required. Typically, a workaround approach could be to segregate the imagery archive in consecutive epochs over which the morphological changes can be neglected, then analyzing each of these periods individually following our methodology. This would allow identifying, beyond the intertidal DEM, the regions of marked erosion or accretion.
During the final step of our image processing, we have filtered the images to discard land and water features smaller than a certain size. In our case-study of Bengal delta, we have chosen 10,000 pixels (1 km) to filter ships and small inland ponds and retaining the ocean-land shorelines. This value is essentially subjective and depends on the objective of the analysis. For example, if the objective of the image processing is to map the inland water bodies, one may choose to remove this filtering altogether.
Based on the analysis over a broad region and multiple image tiles, we conclude that the and parameters used in our study are robust and well suited irrespective of the study area. For any user willing to apply our algorithm on Sentinel-2 imagery, these values should remain as reported in this paper. Our ambition for this algorithm is also to be used for another dataset than Sentinel-2. Thus, we keep open the possibility to tune these parameters for sensors with radiometric characteristics different from Sentinel-2 mission.
6. Conclusions
In this work, we present a method to infer an intertidal DEM from Sentinel-2 multi-spectral imagery and hydrodynamic modeling. Our approach, being easy to implement and automate, was designed to be readily usable in any region worldwide.
The near-shore hydrodynamics, particularly during cyclones and storm surges, is an active field of investigation [
30,
33]. While waves play an important role in the flooding, the available topographic information over Bengal delta are generally of inadequate resolution to study the small-scale processes. In future studies, our new DEM could be useful for high-resolution near-shore wave modeling over the Bengal delta. The tools and methodology presented here can be extended to study the morphodynamics of coastal regions, over broad geographical extent such as the large deltas.
Being computationally light, it paves the way towards the new generation of high-resolution spaceborne imagery. Our methodology is expected to be directly applicable to the meter-scale products already available from SPOT or PLEIADES missions, or to the future CO3D constellation expected in 2022. It also allows reanalysis of past missions in the same automated fashion presented here.
Our approach yields a DEM that can also be used to cross-evaluate other near-shore topography datasets, such as the global digital surface model ALOS World 3D (AW3D30, 30 m of resolution, [
51]) or newly available topography datasets provided by ICESat-2 (Ice, Cloud, and Land Elevation Satellite-2) altimetry mission carrying the advanced topographic laser altimeter system (ATLAS) instrument, which is very promising for estimating the elevation of coastal and intertidal areas at low tide [
5].

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}