1. Introduction
Road collisions are increasing, and they are being expected to be the fifth leading cause of death by 2030 [
1,
2]. Annually, millions of people lose their lives on roads worldwide due to traffic accidents [
1], with 40 times more suffering from injuries. These accidents are also the main cause of traffic congestion, which in turn has a great impact on the economy [
3,
4], and billions of dollars are lost due to the treatment of injuries, loss of property, lost working hours, and high fuel consumption [
5]. Several studies reveal that more than 95% of accidents are attributed to human error that can be avoided if the drivers had been warned half a second beforehand [
6]. Vehicular ad hoc networks (VANETs) have emerged, mainly to reduce those accidents, improve road safety and traffic efficiency, and provide user comfort [
7]. Vehicles with hundreds of sensors and communication capabilities share their real-time information about their movement state, road conditions, and traffic situation [
8,
9]. Mobility information is the main building block of VANET applications and services to create hazard-free roads, which optimize the traffic efficiency, and improve network agility. Vehicles use wireless access in vehicular environments (WAVE) devices, also called on-board units (OBU), to communicate with each other in an ad-hoc manner and/or with Road Sites Unites (RSUs) in the infrastructure. These devices utilize the dedicated short range communication (DSRC) protocol to form vehicle-to-vehicle (V2V), and/or vehicle-to-infrastructure (V2I) links.
By utilizing VANET’s capabilities, a wide range of applications can be provided for safety, traffic efficiency, and commercial applications [
10]. Many applications have received attention from research and industry, such as cooperative collision warning (CCWS) [
11], intersection safety [
12], cooperative driving [
13], cooperative adaptive cross-control (CACC) [
14], and driver assistance systems (ADAS) [
15]. These applications have a huge potential to save tens of thousands of lives and billions of dollars each year [
16]. An extensive review of VANET applications can be found in References [
6,
17]. With such applications, vehicle automation will become a reality, such that human error will be minimized, and the vehicles can navigate safely even under hazardous and dangerous traffic conditions such as fog, black ice, and accidents. The performance of most VANET applications depends on the availability of continuous, accurate, and up-to-date vehicle mobility information, including position information, speed information, and direction information [
18]. In VANET, vehicles cooperatively share their mobility information to facilitate the operation of applications. However, VANET is vulnerable to many types of attacks that can disrupt the functionality of these applications. Such vulnerability is due to the deployment of VANET in hostile environments, and the cooperative nature of these applications [
19]. Context-driven attackers may exploit the aforementioned vulnerabilities and inject false information to influence vehicles’ behavior [
20]. Consequently, the compromised vehicle can manipulate the data and share false mobility information, which leads to catastrophic accidents that might put many lives in danger. Moreover, the misbehaving vehicle can deceive other benign vehicles to make wrong decisions by responding to illusive events, such as sudden braking and wrong maneuvering, causing serious traffic problems and accidents [
11,
19]. Moreover, attackers can hijack and control the compromised vehicles and use them to commit many crimes, including terrorist attacks, assassination, and running over crowds of people, to name a few. Several studies have investigated the influences of misbehavior on VANET performance [
21,
22,
23]. These studies revealed that attackers could significantly degrade the traffic flow, the performance of the routing protocol, and channel utilization. Threats such as artificial collisions [
24], illusion attack [
25], and Sybil attack [
26] are difficult to be detected [
27]. The most sophisticated case is when false information resembles real abnormal situation patterns, such as accidents, congestion, and braking patterns [
28].
Several solutions have been proposed to defend against insider attacks, namely the context-driven attacks that send false mobility information in VANET. Preventing vehicles from sending false information through cryptographic techniques is computationally expensive and ineffective for many attack scenarios. Meanwhile, many attacks in VANET are inevitable. For example, attackers can manipulate the sensors’ data prior to the application of cryptographic techniques. Sensors can also be deceived by simulating the environment around them, making them acquire false data. Hence, vehicles may spread legitimate but false information [
19]. Preventing vehicles from spreading false information in VANET is computationally expensive and could be challenging in many cases [
19]. Therefore, misbehavior detection (also called intrusion detection) is crucial for VANET security. Detecting intruders locally and autonomously is the ultimate goal of misbehavior detection in VANET so that an immediate response can be taken. Most of the existing misbehavior detection systems (MDS) employ a set of rules for detecting misbehaving vehicles. These rules assume a stationary environment and identical independence of their input variables. Moreover, several issues have been found in the existing MDS, which adversely affect the performance of the MDS. These issues are related to sensor uncertainty, communication reliability, non-stationary (dynamic) context, and insufficient context representation. However, overlooking sensors’ uncertainties, communication reliability, and dynamic vehicular context increase the false alarms rate and decrease the detection rate. The dynamic and heterogeneous noise environment renders data acquisition algorithms unstable, which, in turn, increases the uncertainty of mobility information and adversely affects the information accuracy shared among the vehicles. In addition, vehicles’ high mobility and density increase congestion in the communication channels. Such congestion creates unreliable communication and generates incomplete and uncertain mobility data. Nevertheless, extant misbehavior detection solutions have ignored such an issue and used predefined static thresholds in a highly dynamic context instead.
Furthermore, existing solutions are limited to basic and specific attack types. However, many types of attacks can target VANETs, including falsifying vehicle data and hijacking the vehicle’s entire system to control a wide range of its functionalities. As such, existing solutions are limited to a particular type of context-driven attacks, namely the basic type; hence, they cannot be generalized. Basic and multifaceted rule sets-based MDS models have been commonly used to detect misbehaving vehicles and intrusions, by building multi-classifiers with independent assumptions. That is, the input variables have been assumed identically and independently distributed (i.i.d.). However, these assumptions are unrealistic for real VANET applications. Such solutions ignore the correlations among the input variables, resulting in a set of non-independent classifiers. Although the output of one classifier might contain information about the output of the other classifiers, which, if utilized, could improve the detection accuracy, such correlation has been ignored by the existing solutions. That is, the correlation among input variables has been overlooked, leading to insufficient context representation, which decreases the detection rate and increases the false alarms rate.
To this end, this paper proposes an ensemble hybrid context-aware misbehavior detection system model (EHCA-MDS), to address the aforementioned two issues, namely, the adaptability of the MDS model with the context, and the insufficient context representation. EHCA-MDS utilizes the concepts of the wisdom of crowds and the power of diversity to improve its effectiveness. Multifaceted adaptive statistical-based classifiers and ensemble learning-based classifiers were integrated to detect the different types of misbehaving vehicles that share false mobility information. More specifically, EHCA-MDS combines several non-parametric, unsupervised-based online statistical classifiers with a supervised-based offline classifier. This combination brings along the robustness and the effectiveness of VANET critical applications. A multifaceted context reference was built and updated online using the Hampel filter, which utilizes the spatial and temporal correlation of the features derived from the mobility information collected from the neighboring vehicles using a Kalman filter-based algorithm. Three types of multifaceted and hybrid features were used to construct the context reference, namely, the consistency-based, plausibility-based, and behavioral-based features. The Kalman filter-based algorithm was used to periodically track and predict the mobility states of the neighboring vehicles due to its efficiency in tracking multiple vehicles’ states that are suitable for real-time requirements of VANET applications [
29]. During such tracking, the Kalman filter-based algorithm collects recent mobility information of the neighboring vehicles. Using the spatial and temporal properties of the mobility information that were generated from the neighboring vehicles, multidimensional feature sets that represent data plausibility, data consistency, and the behavioral activities were extracted. The Hampel filter was then used to construct a dynamic context-reference using these features. Vehicles were evaluated from different perspectives using the Hampel filter-based z-score algorithm. The evaluation was based on the vehicle’s deviation from the dynamic context reference. As a pre-detection process, multiple adaptive statistical classifiers were proposed using the Hampel filter due to its robustness to outliers and its non-parametric nature that can be built online and fit the dynamic vehicular context. As such, the context reference can be estimated even in the presence of attackers’ data. This is because the Hampel filter introduces the breakdown points concepts, in which it considers the smallest percentage of outliers that can render the classifiers biased. The larger the breakdown point an estimator has, the more robust it becomes. This statistical classification model is called the hybrid context-aware misbehavior detection system model (HCA-MDS). HCA-MDS was further improved using the random forest (RF) algorithm to include the correlation among input features and create an ensemble of independent classifiers. The RF was trained using the output coming from the statistical classifiers, along with the context reference model parameters, the consistency features, the plausibility features, and the behavioral features. The random forest algorithm creates a random set of independent classifiers resulting in an unbiased decision. It also selects the most relevant features based on the contribution of each feature that well represents the vehicular mobility data. The final decision was taken based on the output of both statistical and random-forest classifiers. EHCA-MDS is a comprehensive misbehavior detection solution as it combines supervised with unsupervised learning, statistical with machine learning classification, and data-centric with behavioral-centric features in one model, such that it can be generalized for VANET applications.
The rest of this paper is organized as follows. The related works are reviewed in
Section 2. The proposed model is elaborated in detail in
Section 3.
Section 4 presents the performance evaluation and the experimental setup.
Section 5 illustrates the results, while
Section 6 discusses and analyzes the results. Finally, the paper is concluded in
Section 7.
2. Related Work
Due to the tight relation with road safety, business activities, and cybersecurity, VANET is vulnerable to many types of cyberattacks that lead to physical damage, vandalism, terrorism, robbery, kidnapping, and fraud, to name a few. Most of the severe attacks in VANET are context-driven attacks, which manipulate their own context information (mobility data). These attacks might be orchestrated by organizations with a substantial amount of resources, such as government agencies that sponsor cyberwarfare [
30]. Such attacks can disturb public safety and/or business activities, leading to substantial loss of lives and properties. Preventing vehicles from sending false information in VANET could be impossible due to the presence of vehicles in hostile environments where the onboard sensors can be manipulated by the owner or technician during maintenance, making vehicles vulnerable to attacks. Although preventing attacks through cryptography-based solutions might be suitable to thwart external attacks, such solutions are not able to prevent the internal attackers that send false information [
19]. Because the performance of VANET applications and services depend on exchanging high rate, accurate, and reliable mobility information, attackers that manipulate such information can disrupt the operation of these applications, which put the road safety at risk and adversely affects the traffic efficiency [
31]. Likewise, an attacker can employ malware to invade vehicles’ operating systems and manipulate the vehicular data, which make the vehicle send false information, such as fake accidents or false congestions messages [
19]. Once compromised, the vehicle can be used to carry out many types of crimes, like assassination, hijacking, terrorism, and sabotage. Moreover, malware can force vehicles to respond to fake events, such as hard breaking, which might expose onboard passengers to life threatening accidents. Therefore, misbehavior detection systems (MDSs) are important security measures that work as the second line of defense when the prevention approaches fail. MDSs aim at protecting the integrity of the data and guarantee their correctness.
Misbehavior detection systems (MDSs) have been studied for many years, and several solutions have been suggested [
20,
32,
33,
34,
35,
36,
37,
38,
39]. These solutions can be categorized into three approaches, behavioral [
32,
33,
34,
35,
36,
37,
38], data-centric [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44], and hybrid [
20,
39]. A detailed and recent summary of those approaches can be found in Reference [
30]. The behavioral-based approach has been investigated in intrusion detection and misbehavior detection in VANET. A node would be classified as a misbehaving vehicle if it violated the expected behavior predefined by VANET protocols, applications, and/or services. Moreover, behavioral-based techniques try to encourage cooperation among vehicles. A dedicated watchdog mechanism was adopted by several studies, such as in References [
32,
33,
34,
35], to monitor the compliance of a vehicle with the predefined expected behavior. The behavioral-based detection starts by monitoring the observable behavior of vehicles, such as forwarding behavior in routing protocols, and broadcasting behavior in broadcasting schemes. For example, monitoring forwarding behavior allows for detecting the wormhole attacks while the broadcasting rate allows for the detection of Denial of Service (DoS) attacks. Although the behavioral approach can effectively detect many types of attacks, it is not suitable for detecting misbehaving vehicles that send false information as it focuses only on monitoring the behavior of the nodes against known protocols and/or services. Vehicles that send false information may not violate those predefined rules or deviate from the expected behavior.
The data-centric approach is feasible to detect misbehaving vehicles that share false information [
10,
40,
41,
42,
43,
44]. Data-centric-based solutions can be farther classified into event-based or context-based misbehavior detection. Event-based MDS focuses on detecting false event messages, such as false congestion alerts [
44], false crash notifications [
38], or false emergency messages [
41,
45]. However, event-based MDSs are application-specific, as they covers only certain types of events, such as congestion and crash notification. Although a generalization of such an approach has been suggested by many researchers, it is still in the conceptual forms, such as in References [
43,
46,
47], and no implementation has been attempted yet. In addition, the event-based MDS tries to detect if the emerged events were raised due to attack, which is almost difficult to detect locally in ephemeral networks, as it is the case in VANET.
The second type of data-centric-based MDS is context-based MDS. This type of MDS has received much interest from VANET researchers as the performance of most VANET applications and protocols depends on the availability of accurate context information [
48]. Therefore, it is commonly believed that context-based data-centric misbehavior detection has many advantages. For example, context-based misbehavior detection can detect most types of attacks that send false information, including false events [
29,
44,
49,
50]. Most of the possible attacks in VANET are performed through manipulating context information [
51,
52]. In addition, attackers in VANET target this type of information as they can inflict major damage easily while they remain undetected [
23,
25,
26,
53]. As such, this study aims to build a mobility information-based MDS. Mobility information-based MDSs are more general than the event-based MDSs for locally detecting the misbehaving vehicles that send false information messages. In contrast to event-based MDSs, mobility information-based MDSs try to detect the attacks in the early stages, i.e., before it develops to advanced stages. In other words, the attacks can be detected before the attacker succeeds in triggering the vehicles to send false event messages.
Plausibility and consistency checks are common detection techniques used by existing data-centric solutions. Plausibility-based detection uses a particular known data model of the real-world for detecting implausible information [
20,
54]. For example, two vehicles cannot occupy the same area at the same time. Similarly, it is implausible for a vehicle to exist in different locations at the same time. Meanwhile, data consistency is used to compare messages received from many independent sources to detect any inconsistencies [
10,
54]. Unlike message plausibility, data consistency correlates messages originated from different sources. For example, the speed reported by the positioning sensors should be consistent with the vehicle velocity obtained from the speedometer. Plausibility- and consistency-based solutions [
10,
29,
50,
51,
55,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65,
66] can effectively detect many types of attacks under controlled conditions, in which accurate and reliable information can be collected. However, the vehicular environment is highly dynamic, and the collection of accurate and reliable information cannot be guaranteed. Unfortunately, the existing MDS solutions use pre-defined static thresholds to detect the misbehaving vehicles, such that a vehicle whose data consistency or data plausibility exceeds certain thresholds is deemed as misbehaving. However, in the vehicular network where vehicles move in a harsh environment, communication is unreliable due to the heterogeneous and dynamic noises. Consequently, the data collected are inaccurate and incomplete as a result of message loss that increases due to vehicle mobility and density. As such, static thresholding-based solutions produce high false alarms and low detection rate. On the other hand, a data-centric context-aware MDS (DCA-MDS) proposed by the authors of this paper significantly reduced the false alarms rate and improved the detection accuracy. The solution was successfully able to classify the mobility messages. However, it was not able to identify misbehaving vehicles. In addition, DCA-MDS is vulnerable to context-aware attackers that incrementally manipulate the mobility data and can bypass the dynamic thresholds. In the current study, the DCA-MDS has been modified to identify misbehaving vehicles instead of false messages.
One possible solution to address this issue is by combining the data-centric-based technique with behavioral techniques [
67]. Such a combination is referred to as a hybrid-based approach in this paper. The hypothesis is that a context-aware attacker will be keen to convey the false pattern to victims, e.g., by increasing the broadcasting rate, resulting in a different behavior compared to the neighboring vehicles falling in the same context. Bissmeyer and Michael [
20] proposed a model that includes behavioral activities in the evaluation of the vehicle. However, predefined static thresholds were used in the detection. In addition, no deep analysis or discussion has been performed to validate the proposed model. In addition, the correlation among the independent classifiers was not considered, which makes the scheme vulnerable to sophisticated attacks, such as advanced illusion attacks where the attackers create traffic illusions by sending consistent and plausible information. Grover and Laxmi [
39] have trained MDS models based on a set of behavioral and data-centric features using different machine learning techniques. Random forest generated the highest accuracy. However, no details have been provided about the types of the implemented attacks and the scenario used to generate the training dataset.. In addition, the context-features have not been considered in this model, which renders such a solution specific to a particular scenario. Accordingly, Grover and Laxmi’s [
39] model cannot be generalized. Moreover, the attackers can leverage the model to search for a successful attack. A more general model was proposed in Reference [
68], where the datasets were generated under different communication status and environmental noises scenarios. The context was represented by behavioral and data-centric features that were extracted offline, assuming the availability of sufficient information. The MDS model was trained using the neural network algorithm and tested against basic attacks. The derived features were a combination of the consistency features generated using the Kalman filter algorithm and plausibility features generated using the overlapping test algorithm. The results showed the advantage of the proposed model compared to state-of-the-art. However, the model was not evaluated against the context-aware and sophisticated attacks. Ghaleb and Maarof [
67] proposed hybrid misbehavior detection that combines both behavioral-based classifiers with data-centric features. However, such an approach has overlocked the correlation between those multifaceted features causing a high false alarms rate.
To protect the VANET from a wide range of attacks, multifaceted, data-centric-based MDSs that utilize data-consistency and plausibility-based rules were commonly suggested by many studies in the literature. However, most such studies rely on predefined static thresholds that do not fit the dynamic nature of VANETs. To improve detection accuracy, hybrid MDSs that combine behavioral-based features with the data-centric-based features were suggested by several other works. However, such an approach has not been deeply studied yet. Most of the solutions in this regard use independent multifaceted rules that ignore the correlation between these rules causing low detection accuracy and high false alarms. The machine learning-based solutions can perceive such relationships. However, existing machine learning-based solutions overlook the context dynamicity and the sophisticated attack types, which render using the supervised machine learning-based solution alone ineffective for VANET dynamic context.
In this paper, a more comprehensive approach called an ensemble-based hybrid context-aware misbehavior detection model for vehicular ad hoc network (EHCA-MDS) was proposed. The wisdom of crowds and power of diversity concepts have motivated the authors of this paper to construct an ensemble of multifaceted hybrid- and context-aware-based classifiers. Both statistical and machine learning-based approaches were used to build those classifiers. Multidimensional features that reflect the data consistency and plausibility, as well as vehicular behaviors against the communication protocol, were derived to construct the multifaceted statistical-based classifiers. Then, a dynamic context reference model was constructed using Kalman and Hampel filter-based algorithms utilizing the spatial and temporal correlation among mobility information collected from neighboring vehicles. The context reference is dynamically updated according to the newly arrived data from the neighboring vehicles. Vehicles are evaluated using a robust Hampel filter-based outlier z-score algorithm. Vehicles were evaluated based on the deviation from the context reference. The random forest algorithm was used to learn the features of legitimate and misbehaving vehicles, by which a set of diverse classifiers were constructed for the ensemble model. This ensemble was trained based on rich features extracted from the output of the statistical classifiers, the vehicles’ data consistency and plausibility, the behavioral scores, and the context model parameters. The outputs of the statistical classifiers and machine learning-based classifiers were aggregated using the weighted voting scheme to deduce the final class.
3. Materials and Methods
The proposed misbehavior detection model is host-based, i.e., it is deployed at each vehicle to detect the local misbehavior in its initial stages before it develops to a sophisticated attack. Due to the absence of labeled attack data, the proposed solution uses an unsupervised statistical method to construct a context reference to detect novel attacks in their early stages. It is a context-aware model, in which a dynamic context reference is constructed and updated online based on the analysis of the spatial and temporal properties of the recent mobility information collected from neighboring vehicles. The proposed model analyzes both the mobility information and the vehicle’s cooperative behavior to derive multi-dimensional features that enable detecting a wide range of misbehavior attacks. The mobility information was used because they are the main building block of VANET applications, and they are targeted by many attacks, which have a huge impact on VANET’s critical applications and services, as pointed out above. The proposed model is hybrid as it combines a set of multifaceted classifiers to provide diversity that facilitates detecting a vast type of misbehaviors that target VANET’s mobility data.
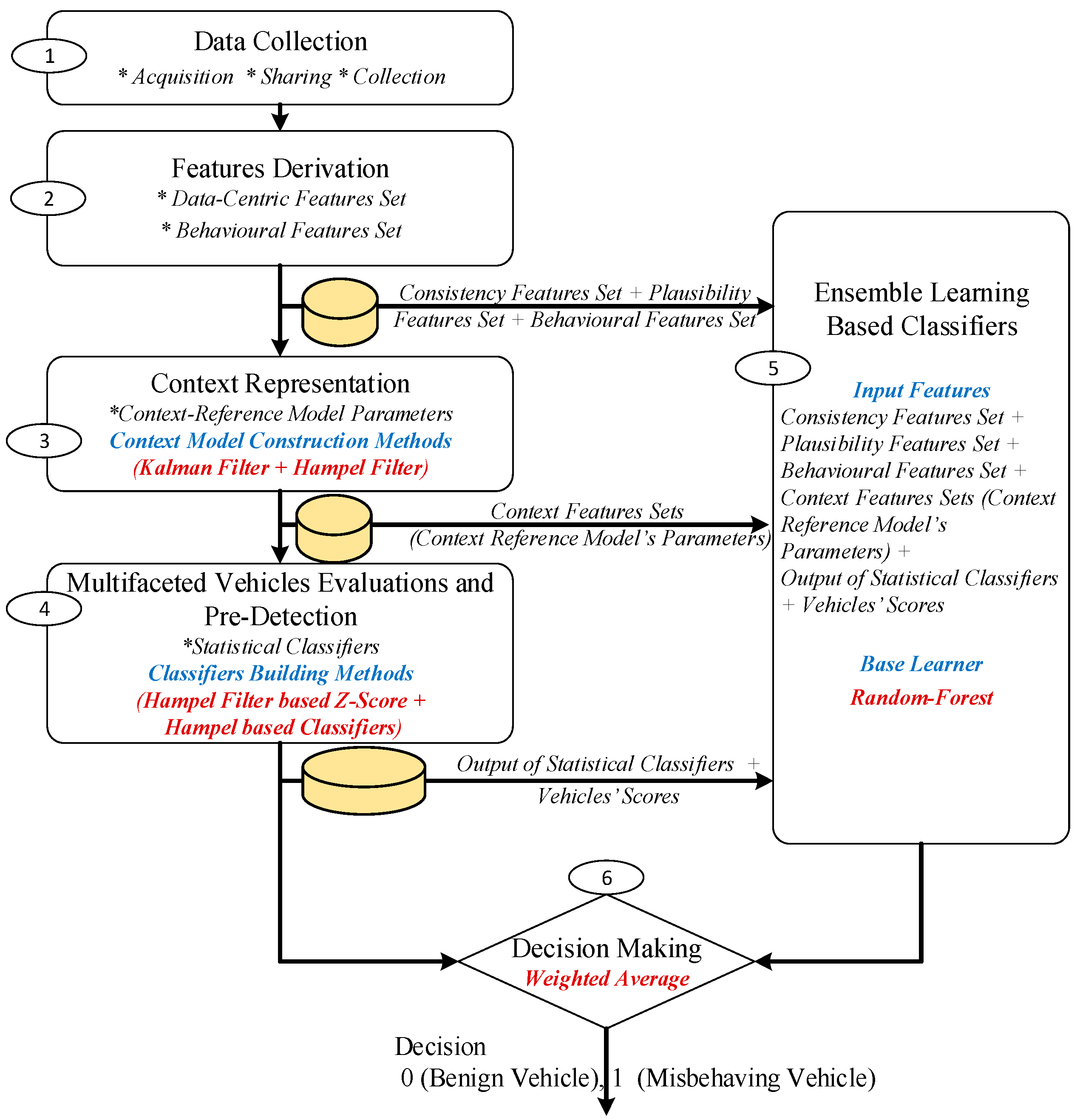
Figure 1 shows the architecture of the proposed model.
As shown in
Figure 1, the proposed misbehavior detection model consists of six main phases, as follows: firstly, the mobility data collection phase, in which Kalman filter-based algorithms were used to accurately acquire the data from the sensors surrounded by dynamic and heterogeneous noises. The collected data were then efficiently shared among neighboring vehicles. Meanwhile, the data sent by neighboring vehicles were effectively collected. A more detailed description of this phase is presented in
Section 3.1. The second phase is the features derivation phase, in which data-centric (namely data-consistency, and data-plausibility) and behavioral features were derived. The detailed description of the derived features is presented in
Section 3.2. The third phase is the context representation phase. In this phase, a dynamic context reference is built using an adaptive Hampel filter-based method, utilizing the spatial and temporal properties of the derived features. The output of this phase is the context reference model parameters.
Section 3.3. presents a detailed description of this phase. The fourth phase is the multifaceted vehicles evaluation, in which vehicles were evaluated with respect to the derived multidimensional features based on their deviation from the dynamic context reference using the Hampel filter z-score-based algorithm. A set of 13 different classifiers were built (one classifier for each feature) using the Hampel filter-based method, in which vehicles were classified into either misbehaving or benign vehicles. The outputs of this phase are the set of multifaceted, context-aware, statistical-based classifiers, which are used for the pre-detection and the vehicles’ scoring. More details about this phase are presented in
Section 3.4. In the fifth phase, the outputs of the second phase (the derived consistency, plausibility, and behavioral features), the third phase (context reference model parameters), and the fourth phase (pre-classification and vehicle scores) were used as input features to train the ensemble learning-based classifiers. The random forest algorithm was used to create a set of independent classifiers. More details about this phase are presented in
Section 3.5. In the sixth phase, a weighted average-based method was used to aggregate the output of the classifiers in phase 5 and produce the final decision. More details about this phase are presented in
Section 3.6. The detailed description of the used methods is presented in the following subsections.
3.1. Data Collection Phase
In this phase, each vehicle collects the mobility information shared by its neighboring vehicles. Data collection in VANET is not a trivial task due to the surrounding noises and harsh communication environment. In particular, vehicles’ sensors are surrounded by different types of noises, which render obtaining accurate data challenging. Furthermore, the communication channels between the vehicles are unreliable due to the high mobility, traffic density, and drivers’ behavior.
Figure 2 shows the data collection scheme used by each node (vehicle or RSU) that hosts the MDS to collect the mobility information. A similar data collection scheme was used recently in our previous publications [
67,
69]. However, this scheme will be elaborated in more detail.
The scheme in
Figure 2 consists of three main components: data acquisition, data-sharing, and data collection. During data acquisition, each vehicle uses the acquisition algorithm to acquire the mobility data recorded by its onboard sensors, such as Global Positioning System (GPS) receiver, speedometer, accelerometer, and gyroscope. However, the harsh environment that these vehicles operate within, as well as the mobility nature of those vehicles, contained heterogeneous and dynamic noises within the data, which render the acquired data uncertain and the environment-dependent, i.e., it depends on the environment surrounding the vehicles’ sensors. A robust acquisition algorithm that is aware of such an environment should be used to improve the accuracy and estimate the uncertainty of the acquired data. Although there are many acquisition algorithms in the literature, the improved innovation-based adaptive estimation Kalman filter algorithm proposed in Reference [
70] has been found robust for heterogeneous and dynamic noises in vehicular environments. The algorithm in Reference [
70], which is called Enhanced Innovation-based Adaptive Estimation Kalman Filter algorithm (EIAE-KF), estimates the measurement noise covariance according to the discrepancy between the prediction and measurement phases of the Kalman filter algorithm in a timely manner. The estimated noise covariance was then used to adaptively adjust the Kalman gain to improve the estimation accuracy along with estimating the uncertainty of the data. For more details about the EIAE-KF algorithm, the readers are referred to the study in Reference [
70].
During the data sharing step, each vehicle shares its mobility information messages with its neighbors. Due to the high mobility of vehicles, mobility data become outdated quickly. Therefore, vehicles should broadcast their mobility information at high rates (10 messages per second according to the VANET standards) [
71]. Unfortunately, the high broadcasting rate in shared communication channels increases the congestion rate within these channels, which in turn increases the rate of lost messages. Moreover, intermittent communication increases the uncertainty of the information, leading to degrading the effectiveness of the applications and increases the false alarm rate in the existing Intrusion Detection Systems (IDSs) solutions. Many broadcasting schemes have been proposed in the literature to adapt the broadcasting rate according to channel characteristics such as busy time status, vehicle density, traffic flow, or a combination of these parameters. In this study, the Driving-Situation-Aware Adaptive Broadcasting Rate Scheme ( DSA-ABR) [
31], has been adopted to broadcast the mobility information. DSA-ABR adapts the broadcasting rate of each individual vehicle according to the driving situation to decrease the number of broadcasted messages, and thus decreases the number of competitors on the channel while preserving the accuracy of the information. Furthermore, DSA-ABR increases broadcasting according to the changes in driving behavior, such as during braking, acceleration, and maneuvering, and it decreases the broadcasting rate when the driving regime is stable and/or mobility information has high uncertainty. During the stable driving situation, neighboring vehicles can accurately predict the omitted mobility messages. On the other hand, if the uncertainty of the information is high, there is no need to increase the broadcasting rate.
For a reliable collection of the mobility information broadcasted by neighboring vehicles, the DSA-ABR uses a Kalman filter prediction algorithm to track the mobility information broadcasted by neighboring vehicles and predict the lost or omitted information. It is worth noting that some mobility information messages are lost due to unreliable communication in the vehicles’ environment. In the DSA-ABR scheme, some mobility information messages that can be easily predicted by receivers are deliberately omitted by senders to decrease the broadcasting rate, so as to improve communication reliability. The output of this phase is a dataset for each neighboring vehicle. Each dataset contains a history of vehicle mobility information sampled at every 100 milliseconds.
3.2. Features Derivation Phase
After collecting the mobility information of the neighboring vehicles, two main types of features were derived: a data-centric-based features set and a behavioral-based features set.
3.2.1. Data-Centric-Based Features
Two data-centric types of features were extracted from each dataset collected in the previous phase: a consistency-based features set and a plausibility-based features set. More specifically, the vector of the innovation errors of the Kalman filter algorithm is used as consistency features. This vector contains the divergence between the predicted state and the received mobility messages. Thus, four consistency features related to the positioning error, and speed prediction errors in both latitude and longitude dimensions, were extracted, assuming two-dimensional space and a fixed acceleration mobility model. The plausibility-based features set consists of three main features, as follows. The communication range-based feature, which is the distance between the sender (all neighboring vehicles) and the receiver vehicle (the subject vehicle that host the misbehavior detection model). The distance of the vehicles’ appearance feature, which is the distance between the sender and the receiver vehicle when the sender vehicle enters the communication range of the receiver vehicle, and the overlapping frequency-based feature, which is the number of times in which the vehicle occupation area of the neighboring vehicles is overlapped with each other. Thus, seven data-centric-based features were derived to represent the data consistency (DC1, DC2, DC3, and DC4) and the plausibility (DC5, DC6, and DC7).
Table 1 presents a list of those features with their names and description. In the table, DSF stands for Data-centeric Features Set while DC stands for Data-Centeric.
The following paragraphs explain more about how the consistency features (DC1, DC2, DC3, and DC4) were derived. As the innovation sequence of the Kalman filter can describe the discrepancy between the expected and reported mobility information, it has been used to represent the consistency of the received information from neighboring vehicles with the information predicted using the mobility model. Accordingly, there are two main steps to derive the consistency score (CS) feature. Where
is a vector that contains the innovation errors of vehicle
that was recorded at the time epoch (
and
is a matrix that contains a list of the innovation errors for all neighboring vehicles. The consistency feature
of a neighboring vehicle
at a specific time epoch,
is then calculated according to the following equation:
where
is the mobility information vector as received from the neighboring vehicle
at the time epoch
,
is the predicted mobility information vector using the last received messages (at the time epoch
, and
is the time epoch when the last message is received.
The plausibility-based features were driven as follows. For the communication range-based feature (denoted by DC5 and
in
Table 1),
contains the list of all neighboring vehicles,
is the position of the vehicle that will drive this feature (the receiver), and
is the position of the vehicle
that sent the mobility messages. Then, the communication range-based feature
of vehicle
at time epoch
can be calculated as Euclidean distance between the sender and receiver, as follows:
The vehicle appearance distance (DC6 or
) is calculated for newly neighboring vehicles when they enter the communication range of the subject vehicle (the receiver). Thus, the
can be set equal to
assuming
is the time epoch when
enter the communication range of the subject vehicle. The overlapping frequency feature (denoted by DC7 or
in
Table 1) was derived based on the work of Bissmeyer et al. in Reference [
20]. In their work, the vehicles were modeled as rectangles so that vehicles are misbehaving if their rectangles intersect (overlap) with each other. This study utilized the same idea to derive overlapping-based features that work as an indication of possible misbehavior. The algorithm in
Figure 3 presents a pseudocode for the data-centric-based features derivation.
3.2.2. Behavioral-Based Features Set
As shown in
Table 2, vehicles’ behaviors are represented by the following six features. Four features (BF1, BF2, BF3, and BF4) were attributed to the vehicle’s behavior against the communication protocol, while two features (BF5 and BF6) are for driving behavior features.
3.3. Context Representation Phase
In this phase, the context reference model is constructed and updated in a timely manner. Because neighboring vehicles are exposed to the same context in terms of traffic conditions, environmental noises, communication status, and road status, thus, the spatial correlation among the features derived in the previous phase can be utilized to construct a dynamic context reference. The spatial correlation among neighboring vehicles has been utilized to construct the context reference. The Hampel filter has been used to construct the reference model as follows: let
is the set of features,
is the set of neighboring vehicles at time epoch
. Also,
is a matrix that contains the value of the features of each neighboring vehicle at time epoch
is a vector that contains the values of feature
derived from each neighboring vehicle
at time epoch
.
where
is the value of the feature j that was derived from the vehicle
at time epoch,
. Thus, the Hampel filter-based dynamic context reference model
, at time epoch
, can be computed as follows:
where
and
are the median and the median absolute deviation (MAD) of each feature in
, respectively.
is the context reference’s upper bound which is equal to the Hampel filter upper bound
.
is the context reference’s lower bound which is equal to the Hampel filter lower bound
), and
β is a threshold that was selected heuristically, such that the best accuracy is obtained. Thus, the model parameters’ can be expressed as follows:
Because vehicular context is highly dynamic due to high vehicle mobility, critical VANET applications require a high rate of context-awareness messages. Thus, it is worth noting that the context references are built on the fly and updated every 100 ms to capture the highly dynamic temporal change of the context data. However, building the context reference based on information collected within a very short period can make the context reference unstable and inefficient, causing improper detection accuracy and delay. Similarly, using a long period can make the context reference rigid. Accordingly, Welford’s approach [
73] to calculate the running average is used to update the
model parameters in real-time, as follows:
where
is the context reference model at time epoch
, and
is the sliding window width. Equation (4) is equivalent to the average of the context references using the average batch formula
, but it is numerically stable and more efficient than the average batch formula.
3.4. Multifaceted Vehicles Evaluation and Pre-Detection Phase
After constructing the context reference, vehicles are evaluated based on their deviation from the context reference. The evaluation has been calculated using a Hampel Filter-based z-score outlier detection (
). Hample filter replaces the arithmetic mean
, and standard deviation
by the median
and median absolute deviation
, respectively. Thus, each vehicle got a score for each feature using Hampel based z-score, which can be rewritten as follows:
The set of z-scores of a vehicle,
, at time epoch,
, was represented by a vector,
, as follows:
Accordingly, the set of all scores of all vehicles can be represented by a matrix,
, as follows:
Different statistical classifiers were developed according to the context reference and vehicle scores. With each vehicle, a set of tests has been conducted for each feature to the prediction results, as follows:
where
is the output of the classifier that represents the features,
, for a vehicle,
, at the time epoch,
.
and
are the context lower bound and the context upper bound respectively, as computed from the feature,
, of all vehicles present at time epoch,
, using the Hampel filter. If the
is located outside those bounds, the corresponding vehicle (
is considered as a misbehaving vehicle with respect to the feature,
, detected at time epoch,
.
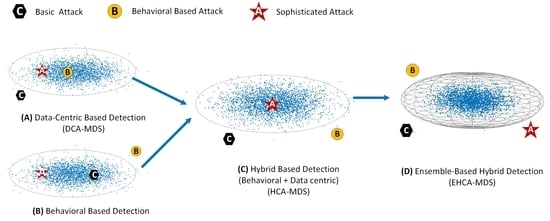
Figure 4 presents the multifaceted MDS model, which contains both the data-centric context-aware MDS (DCA-MDS) and the hybrid context-aware MDS (HCA-MDS). We have distinguished between these two MDSs in order to separately evaluate the performance of each detection concept. The DCA-MDS model is a context-aware MDS that has been built based on the data-centric features. It aims to thwart many types of basic attacks where the attacker is unaware of the context. However, a context-aware or a sophisticated attack type can bypass such a solution rendering DCA-MDS not effective. Thus, the behavioral features-based classifiers were built to assist the DCA-MDS to improve the detection rate. Our hypothesis is that the attackers may show different behavioral activities compared to the benign vehicles because they are keen to convey their false information to the vehicles in their vicinity. Thus, the hybrid model, HCA-MDS, is constructed. The model considers both data-centric- and behavioral-based features.
Figure 5 shows the pseudocode for features derivation, context reference model construction, and the set of classification rules that were used by HCA-MDS and DCA-MDS.
Table 3 lists the description of the symbols used in
Figure 5.
3.5. Ensemble Learning Phase
In the previous section, the vehicles were evaluated, and pre-detection was obtained. Multi-faceted statistical adaptive classifiers were built, as shown in
Figure 3. This design relays on the univariate statistical analysis, in which the input variables (the derived features) were assumed to be independent. That is, a classification rule was created for each derived feature. The relationship among the variables has been ignored, rendering such design vulnerable to sophisticated and context-aware attackers. An attacker who incrementally manipulates the mobility information can end up with a successful attack because the independent classifiers can only distinguish the outliers that deviate much from the statistical context reference represented by that specific feature. Therefore, considering the relationship between the input features is important to detect such advanced attacks. For example, the broadcasting rate feature, which is a behavioral-based feature, is correlated with the consistency features (Kalman innovation errors). If the broadcasting rate increased, the innovation errors of the Kalman filter would decrease. An attacker who incrementally manipulates the vehicle’s own mobility information will be keen to convey the false information to the neighboring vehicle by increasing the broadcasting rate. The attacker will also be aware of the context, so that the increase of the broadcasting rate will be within the context reference boundaries. Thus, independent classifiers that ignore the correlation between the features may not be able to detect such an attack. Furthermore, collecting sufficient information about the vehicles can be challenging in the VANET environment. Therefore, mining previously known data can be useful in detecting previously seen patterns. Because correlation among the features is stationary with respect to the particular vehicular context, a supervised approach can be acceptable to predict the sophisticated attack context-aware attackers. Accordingly, an ensemble-learning-based predictive model has been constructed using the random forest algorithm. A random forests algorithm creates a forest of random decision trees-based classifiers. Each of those classifiers was trained based on a random sample that was randomly selected with replacement from the original dataset. The outputs of the classifiers are aggregated using the majority voting scheme. Inspired by the concepts “wisdom of crowds and the power of diversity,” the random forest algorithm was selected to improve the detection effectiveness and provide comprehensive context representation.
Figure 6 shows the procedure used to train and evaluate the proposed predictive model.
As shown in
Figure 6, there are two main tasks conducted to construct the proposed EHCA-MDS model. The offline training of the random forest-based classifiers and the integration of the trained ensemble classifiers with the HCA-MDS model presented in
Figure 4 for the online operation. For offline training, the first procedure is the preparation of the datasets. The preparation includes noise injection to simulate the vehicular noise environment. The datasets have been replayed under different communication reliability scenarios, where different message loss ratios were simulated. Then, many basic and sophisticated attack types related to false mobility information attacks have been simulated and injected into vehicle trajectories. A detailed description of the procedure of the data preparation is presented in the next section (
Section 4). Then, the HCA-MDS model is implemented and used by each vehicle in the datasets to detect the simulated misbehaving vehicles. Each vehicle uses the proposed algorithm shown in
Figure 5 to derive the context features, construct the context reference model, evaluate the vehicles, and provide pre-detection outputs. Then, the derived features, the parameters of the context reference model, the vehicle’s scores, and the classification outputs have been used as input features to the random forest algorithm to construct the ensemble-based classifiers. The integration of the trained ensemble classifiers with the HCA-MDS model was then carried out for the online operations. The classification outputs of all classifiers (the statistical and the ensemble-based classifiers) were aggregated using a weighted average for the final decision.
3.6. Decision Phase
After obtaining the outputs of the statistical and ensemble learning-based classifiers, the final decision is taken using the following formula:
where
is the final decision, and
and
are the weight and the output of the classifier
, respectively. The classifiers’ weight vector,
, is obtained from the performance of the classifiers according to the performance of the individual classifiers. For example, if the performance of the classifier
in terms of F-measure is 80%, the classifier is then weighted as 0.8. Consequently, if the condition in Equation (9) was true, the misbehaving vehicle would be detected.
5. Results
In this section, the performance of the proposed EHCA-MDS, HCA-MDS, and DCA-MDS, in terms of the aforementioned performance measures, is presented. In HCA-MDS, the classification outputs of all statistical classifiers have been aggregated using the logical OR operator to obtain the final decision (the pre-detection phase). That is, a misbehaving vehicle is identified if the output of any one of the independent statistical classifiers is positive. The context-aware entity-centric MDS model (DCA-MDS) is similar to the hybrid model with the behavioral classifiers removed. The Ensmbel-based Hybrid Context-Aware MDS (EHCA-MDS), Hybrid Context-Aware MDS (HCA-MDS), and Data-Centric Context-Aware MDS (DCA-MDS) were compared with the Bissmeyer’s model [
20], called the Entity-Centric Trust-based MDS (ECT-MDS) model and Stübing’s MDS model [
58]. Stübing’s MDS [
58] has been used as a baseline for evaluating misbehavior detection by several studies [
20,
29]. The results of the simulations are presented in
Table 5. For each value in
Table 5, the results were averaged over 144 runs (16 datasets × 9 communication scenarios) with respect to the performance measure.
The results in
Table 5 show that EHCA-MDS has achieved the highest accuracy performance in terms of detection accuracy (see
Figure 7a). That is, 97.01% of the vehicles were correctly classified by the EHCA-MDS compared to 93.01% for the HCA-MDS, 90.98% for the DCA-MDS, 74.79% for the ECT-MDS, and 87.37% for the baseline MDS model. In terms of the false positive rate, the EHCA-MDS achieved the lowest false alarms, 1.19% of benign vehicles were misclassified as attackers by the EHCA-MDS compared to 4.45%, 2.33%, 2.98%, and 4.79% of HCA-MDS, DCA-MDS, ECT-MDS, and MDS models, respectively. Furthermore, the ensemble-based approach, EHCA-MDS, achieved the lowest false positive rate (1.19%) compared to the independent-classifiers HCA-MDS and DCA-MDS and non-context-aware model ECT-MDS and Stübing’s MDS (see
Figure 7b), which achieved 4.45%, 2.33%, 2.98%, and 4.79%, respectively. Regarding the detection rate, an average of 90.45% of misbehaving vehicles has been correctly identified by EHCA-MDS compared to 86.11%, 66.18%, 30.65%, and 62.55% for the HCA-MDS, CA-MDS, ECT-MDS, and MDS models, respectively. That is, EHCA-MDS has achieved the highest detection rate compared to the related work (see
Figure 7c). Overall, EHCA-MDS has achieved the highest detection performance, which is 92.82% compared to 84.44%, 75.05%, 44.49%, and 71.60% for HCA-MDS, CA-MDS, ECT-MDS, and MDS models, respectively. The results in terms of F-measure shows that the proposed model achieves the highest trade-off between precision and recall (see
Figure 7d).
Table 6 summarized the improvement gained by the proposed EHCA-MDS compared to the other studied models HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline. In terms of the overall accuracy, the EHCA-MDS achieved 3.5, 6.03, 22.22, and 9.64 higher than HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline, respectively. That is, the accuracy has been improved by 3.74%, 36.67%, 29.71%, and 11.03%, as compared to HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline, respectively. The false-positive rate has been reduced to 1.19%, which becomes 73%, 36.67%, 60.07%, and 75.16% lower than that of HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline, respectively. The detection rate (DR) was improved by 5%, 36.67%, 195.11%, and 44.60% compared to HCA-MDS. In terms of precision, the proposed EHCA-MDS has been improved by 11.8% compared to HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline, respectively. The overall performance has been improved by 9.9% compared to HCA-MDS.
Figure 8 shows the performance comparison between the proposed EHCA-MDS, the independent classifiers-based approach (HCA-MDS), the data-centric context-aware-based approach (DCA-MDS), and the related non-hybrid non-context-aware models (ETC-MDS and MDS) under different context scenarios where the communication reliability degraded from ideal in the first scenario to the worst in the last scenario. The X-axis contains nine context scenarios. In each scenario, different messages’ arrival rates that represent different communication statuses were used. The
Y-axis contains the average results of replaying the 16 datasets listed in
Table 4 under each context scenario in terms of the performance measures, namely, detection accuracy (
Figure 8a), FPR (
Figure 8b), DR (
Figure 8c), and the F-Measure (
Figure 8d).
Figure 8a–d compare the impact of different vehicular contexts on the detection performance of each model. All the context-aware models (EHCA-MDS, HCA-MDS, and DCA-MDS) manage to keep the false positive rate low.
Figure 8a shows the comparison of the accuracy performance of EHCA-MDS with the other implemented MDS models.
Figure 8b compares the performance of EHCA-MDS in terms of the false-positive rate. EHCA-MDS has the lowest false positive rate in most scenarios, with a slight increase when communication becomes more unreliable. HCA-MDS has the highest false-positive rate among the context-aware models.
Figure 8c compares the performance of EHCA-MDS with other MDS models in terms of the detection rate. EHCA-MDS has the highest detection rate in most scenarios. In the first scenario where the communication was assumed ideal, the detection rate of the EHCA-MDS is lower than that of HCA-MDS.
Figure 8d summarizes the overall performance of EHCA-EC-MDS compared to the other MDS models in terms of the F-measure. Particularly, EHCA-EC-MDS has the highest F-measure values in most scenarios. Only under the assumption of ideal communication, the overall performance of the EHCA-EC-MDS, in terms of F-measure, is lower than that of HCA-EC-MDS. However, the difference is insignificant.
6. Discussion
In this study, the ensemble hybrid context-aware misbehavior detection system model (EHCA-MDS) was introduced to address the adaptability issue of the MDS model with the highly dynamic vehicular context as well as the issue of insufficient context representation. To address the adaptability issue, Kalman and Hampel filters were used to build a hybrid multifaceted dynamic context reference utilizing neighboring vehicles’ context information. Accordingly, hybrid multifaceted statistical models were constructed online and updated in a timely manner. In doing so, the misbehaving vehicles can be effectively detected locally and autonomously. That is, vehicles that deviated much from the context reference are considered suspicious. To address the issue of insufficient context representation, the output of the hybrid and multifaceted classifiers were used as new features to train an ensemble of machine-learning-based classifiers using the ensemble learning method. The random forest algorithm was used as the base classifier. The results from both statistical- and ensemble-based classifiers were combined using a weighted average function for more effective results. The results show the effectiveness and robustness of the proposed model for dynamic vehicular context. In
Table 4,
Table 5,
Figure 7, and
Figure 8, significant improvements were observed by the proposed EHCA-MDS model compared to the existing MDS models in all studied scenarios. The results confirm that the proposed ensemble-based model (EHCA-MDS) outperforms the existing models, including the independent hybrid model (HCA-MDS), the non-hybrid context-aware model (DCA-MDS), and the non-context-aware-based models (ECT-MDS and MDS) with high significance (see
Table 4 and
Figure 7).
The results in
Table 4,
Table 5,
Figure 7, and
Figure 8 indicate that the combination among several non-parametric, unsupervised-based online statistical classifiers with a supervised-based offline classifier consolidates the robustness and the effectiveness of VANET critical applications. The improvement achieved by the proposed model suggests that the consideration of the correlation among the hybrid and multifaceted features can capture the unseen behavior of the misbehaving vehicles. That is, sophisticated attacks that are aware of vehicular context and resemble benign vehicles can be easily identified when the correlations among features are considered. Considering the correlations between the outputs of individual classifiers provided effective context representation and worked as a pre-detection step that helps the ensemble-based classifiers to accurately distinguish the misbehaving vehicles from other benign ones. The lack of consideration of the correlation among the outputs of the statistical classifiers led to lower accuracy (see
Figure 8a,c). This is because of the sophisticated attackers that are aware of the parameters of the statistical classifiers. Thus, those parameters can be used as attack thresholds to normalize attackers’ behavior and avoid detection. To increase the detectability of the sophisticated attackers, the limits of the statistical classifiers can be shrunk. The problem, however, is that such shrinking leads to an increase in the false-positive rate. This interprets the high positive-rate resulted from the HCA-MDS (see
Figure 8b) and led to reducing the overall performance (see
Figure 8d). Both the non-context-aware and non-hybrid approaches (ECT-MDS [
20] and MDS baseline [
58]) are ineffective even for simple attack types ( See
Figure 8) due to the ignorance of the context and lack of considering the correlation among different features.
As shown in
Figure 8a, EHCA- MDS remains stable at the highest accuracy among all the models in most of the scenarios. In the first scenario where the communication was assumed ideal, the accuracy of the HCA-MDS is slightly higher than the accuracy of the EHCA-MDS. However, the EHCA-MDS is more robust than HCA-MDS when the communication becomes unreliable. This is due to the consideration of the relationship among the input features in the EHCA-MDS compared to the other models that treat the features separately, which has led to insufficient representation and thus lower accuracy. Although both DCA-MDS and HCA-MDS have a high false-positive rate compared to the EHCA-MDS, all context-aware models are relatively stable and robust to the context change (see
Figure 8b). As shown in
Figure 8b, EHCA-MDS is more stable and robust in terms of the false-positive rate than the other tested models. When the data is accurate, the baseline model has a relatively low false-positive rate compared to HCA-MDS and DCA-MDS. However, when the context becomes unreliable, or data accuracy is highly uncertain, the false-positive rate of the baseline MDS model increases rapidly.
From
Figure 8c, it can be noted that in the first scenario where the communication was assumed ideal, the accuracy of the HCA-MDS is slightly higher than the accuracy of the EHCA-MDS. This is because the ensemble-based learning-based classifiers could not well distinguish between the patterns of the sophisticated attack due to its high similarity with the behavior of benign vehicles in the ideal context scenarios. This explains the drop in the accuracy under the first scenario, as shown in
Figure 8a. The detection rate remains stable as the communication becomes highly unreliable as their detection rate stays stable under different context scenarios (see scenarios 6, 7, 8, and 9 in
Figure 8c). It can be observed that neither context-aware nor non-context-aware was able to detect sophisticated attacks effectively. The non-context-aware schemes fail to achieve a balance between the detection rate and the false positive rate. That is, both the false positive rate and the detection rate of the non-context-aware (Bissmeyers’ ECT-MDS and Stübing’s MDS) approach increases dramatically when the communication becomes more unreliable. In contrast, the context-aware approach (EHCA-MD, HCA-MDS, and DCA-MDS) has a better trade-off between the detection rate and the false positive rate (see
Figure 8b,c). It can be observed that the EHCA-MDS is more effective in terms of the trade-off between detection rate and false-positive rate among all studied models. Compared with the non-hybrid approaches, EHCA-MDS and HCA-MDS are more effective and stable when making a trade-off between the false positive rate and the detection rate compared with the data-centric and non-context-aware models (DCA-MDS).
From
Figure 8d, one can observe that the overall performance in terms of F-measure shows that EHCA-EC-MDS is more robust and effective than the other studied models. Although the overall performance of the EHCA-EC-MDS is lower than that of HCA-EC-MDS under the assumption of ideal communication, the difference is insignificant. This is due to the drop in the detection rate, as shown in
Figure 8c. The drop in the detection rate is due to the high similarity between attack behavior and normal vehicle behavior. The weights that were given to the classifiers during the decision-making process worked as a penalty in high message arrival rate scenarios. This interprets the improvement in the detection rate when the message arrival rate decreases. Although the difference is insignificant, one idea to solve such a problem is by adapting the classifiers’ weights according to the context. This issue has been left for future work.
To sum up, the performance achieved by the ensemble-based learning approach, i.e., EHCA-MDS, was better than that of the independent statistical classifiers-based approach (represented by HCA-MDS, DCA-MDS, ECT-MDS, and MDS baseline) due to its consideration of the correlation among the outputs of the statistical classifiers. Meanwhile, the performance achieved by the hybrid-based approach, i.e., HCA-MDS, outperformed the non-hybrid approach (DCA-MDS, Bissmeyers’ ECT-MDS, and Stübing’s MDS) due to involving the multifaceted classifiers, which addressed the direct relationship between the behavioral- and data-centric-based features. For example, the attacker who tries to share false events will be keen to increase its broadcasting rate to get more chance over the congested communication channel. On average, HCA-MDS has improved the overall performance by 17.93% compared to Stübing’s MDS model. The proposed context-aware models EHCA-MDS, HCA-MDS, and DCA-MDS can adapt to dynamic vehicular context achieving higher performance than that of the none-context aware models (ECT-MDS and MDS baseline).
Table 7 summarizes the important features that have led to the performance improvement in terms of F-measure achieved by the proposed EHCA-MDS model compared to the existing models.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}