Abstract
The Internet of Vehicles (IoV) is an important idea in developing intelligent transportation systems and self-driving cars. Vehicles with various wireless networking options can communicate both inside and outside the vehicles. IoVs with cognitive radio (CR) enable communication between vehicles in a variety of communication scenarios, increasing the rate of data transfer and bandwidth. The use of CR can meet the future need for quicker data transport between vehicles and infrastructure (V2I). Vehicles with CR capabilities on VANET have a different appearance than regular VANET vehicles. This paper aims to develop effective spectrum management for CR-equipped automobiles. An improved channel decision model has been proposed with proven outcomes to boost the pace of transmission, eliminate end-to-end delays, and minimize the number of handoffs. Many high-bandwidth channels will be used in the near future to communicate large-sized multimedia content between vehicles and roadside units (RSU) for both entertainment and safety purposes. Co-operative sensing promotes energy-constrained CR vehicles for sensing a wide spectrum, resulting in high-quality communication channels for requesting vehicles. Our research on the CR-VANET focuses on channel decision instead of spectrum sensing and it differs from previous studies. We used the DAHP–TOPSIS model under multi-criteria decision analysis (MCDA), a sub-domain of operations research, to boost profits, i.e., transmission rate with less computing time. We constructed a test-bed in MATLAB and carried out several analyses to demonstrate that the suggested model performs better than other parallel MCDA models because there has been a limited amount of research work conducted with CR-VANET
1. Introduction
One of the key study topics in intelligent transportation systems (ITS) is transportation safety. Most people prefer to commute in their own vehicle in today’s fast-paced society. Vehicle users are expanding on a daily basis in populous places, particularly in Asian countries, such as India and China. On the one hand, vehicle manufacturers are working hard to create technology-based vehicles that will appeal to consumers by adhering to safety criteria that include crash tests, vehicle maintenance, and emission testing. On the other hand, the majority of people drive recklessly and threaten other people’s lives. This results in a higher number of deaths and injuries due to organ loss. When we are living a sophisticated life with vehicles, we occasionally reflect on the past as we drive through traffic. Most auto insurance companies are having difficulty determining the specific cause of accidents. The Department of Telecommunications in the United States provides an unlicensed radio band for ITS, namely the 5.875–5.925 GHz frequency band, which has been earmarked for safety purposes using dedicated short-range communication (DSRC) [1,2].
1.1. Vehicular Communication Standards Currently in Use
Vehicle communication standards were established primarily for safety applications in high-mobility contexts. This can help drivers stay safe and inform other road users if a problem arises. The IEEE 802.11 P standard, commonly known as DSRC, is used for vehicle-to-vehicle communication. It facilitates multi-hop communication and works in high-dynamic settings. It does, however, allow for a lot of movement. Due to its limited coverage, it can only converse across a 1000-m range [1].
1.2. Dedicated Short-Range Communication
IEEE 802.11P is especially useful for VANET communications within a 1-km range. Even though the distance is shorter, it provides a variety of safety benefits. Hop-to-hop communication can be used to extend the communication range of a solitary DSRC. Multi-hop communication is not feasible when there is no vehicle within the DSRC range. As a result, most DSRCs have an on-board unit (OBU). In this situation, a fixed roadside unit (RSU) assists in communication between cars when communication between vehicles is impossible. In the United States, the Department of Transportation (DOT) provides a 75 MHz c band between 5.850 and 5.925 GHz radio frequency for DSRC transmission, which is combined with a 10 MHz bandwidth [2,3].
DSRC can enable communication for safety and non-safety applications, such as traffic congestion control, navigation, weather forecasting, cruise control, automatic tolling, emergency response system, infotainment, and entertainment for car users. Many automotive manufacturers have started work on the project, keeping safety and environmental standards in mind. To assist the driver in notifying internal and external factors, all modern automobiles are equipped with various sensors and actuators. This information can be shared via vehicle communication protocols, such as DSRC, and updated over the cloud to help other drivers with navigation, road accidents, and traffic congestion avoidance [4,5].
1.3. CR-VANET
The CR technique can be extended to VANET to utilize unused spectrum bands to improve vehicular communication efficiency. Figure 1 depicts the CR-VANET architecture, which can sense and make decisions across a wide spectrum. The allocation and utilization of the spectrum for networks is a key task to complete. It can be calculated by taking into account several factors, such as unused and underutilized license bands. The suggested work’s primary goal is to avoid a large amount of spectrum utilization in a VANET communication scenario. In a CR-VANET, the sequence of actions, such as spectrum sensing, decision, and switch-over, if necessary, is crucial. We worked on a spectrum decision model in this paper to create an efficient spectrum and reduce the number of unwanted handoffs, through which overall end-to-end delay will be minimized. The study is divided into several sections, including related works, DAHP–TOPSIS, a suggested suitable channel decision method, and performance analysis [6,7].
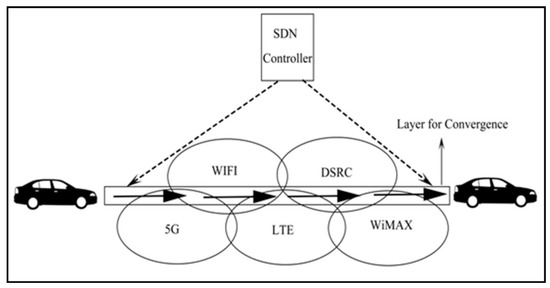
Figure 1.
CR-VANET architecture.
2. Related Works
Xu et al. [8] offered a comparison study between the DSRC and LTE standards, which was evaluated with various communication scenarios, and the authors concluded that DSRC is superior to LTE in collision avoidance and safety applications. The integrated DSRC and LTE systems, according to the author, can help provide safe communication over a greater distance. Kumar et al. [9] proposed an efficient integrated DSRC WiMAX system based on common physical layer parameters to create communication for the intelligent transportation system. Kumar et al. [10] established an uplink communication simulation model based on several vehicular communication scenarios, such as sending data from WiMAX to DSRC using FFT subcarrier matching. Kandar et al. [11] presented a physical layer OFDM parameter, which was simulated by mixing DSRC and WiMAX and tested with image samples to demonstrate that successful communication between multiple standards can be established. Kumar et al. [12] investigated the performance of several vehicular communication situations by considering payload calculation and resource allocation. It can be evaluated in terms of how the resource is assigned to the vehicle’s users via sub-channelization. Kumar et al. [1] presented a novel approach to converge DSRC and WiMAX by considering common physical layer parameters and testing them using picture transmission between DSRC and WiMAX. Thun et al. [13] developed an OpenFlow SDN controller-controlled vehicle ad hoc network augmentation technique. Khadim et al. [14] developed an optimal energy-efficient system for vehicle networks, which they evaluated using a multicast routing protocol controlled by SDN and fog computing. In a vehicle network, Kalokhe et al. [15] suggested a durable and efficient routing technique and a secure channel using software-defined networks.
Chen et al. [16] presented a DCF mechanism in the DSRC standard to increase the performance of a vehicular network utilizing SDN, which they tested with a vertical handoff method between the car and the roadside unit. By addressing load balancing and multipath routing, Toufga et al. [17] offered a comparative analysis of how the software-defined network helps to govern vehicular networks and how it may be used for intelligent transportation system applications. Based on SDN technology, Kalinin et al. [2] suggested an architecture to establish a secure traffic vehicular network to prevent unwanted user access. Huo et al. [18] proposed an efficient model for traffic analysis using a software-defined network to describe the vehicular communication network. Huang et al. [4] suggested an offloading technique based on handover between different networks, such as DSRC and Wi-Fi, as well as an analysis of network quality and signal strength for the vehicle to a fixed infrastructure scenario. The SDN aids in the control and monitoring of a stable IEEE 802.11P and Wi-Fi connection. C. Lai et al. [19] proposed a unique technique based on IP and software vehicular networks to offer safe and lossless communication. Zhu ming et al. [5] suggested an SDN-based routing technique for vehicular networks that may be used for geographical position sharing by routing messages over connected, accessible mobile networks. A survey of SDN-based security threats and services for automotive networks was proposed by Shafiq et al. [20]. Based on a background analysis of several SDN-based VANET systems, the authors concluded that deploying a single distant SDN controller will improve overall network efficiency. By utilizing effective fog computing, Arif Muhammad et al. [21] suggested virtualized security for vehicle networks. This methodology aids in the secure and rapid communication of vehicles operating in high-dynamic environments. Balta et al. [22] suggested a fuzzy-based SDN controller improves traffic signals in large cities by taking into account various environmental scenarios, such as emergencies, typical traffic, and congestion. The authors claimed that a three-stage fuzzy SDN controller aids in decision-making based on priority and demand vehicle routing data. Kalokhe et al. [23] proposed employing an SDN controller to provide efficient and robust routing information for vehicular traffic monitoring and secure communication between vehicles. SDN aids in separating network control from the transmission and reception of data packets using various standard network protocols. SDN is a central control unit that can manage numerous network topologies on a shared distributed network platform.
2.1. Existing DSRC-Based VANET
2.1.1. Different Vehicular Communication Scenarios Using OpenFlow SDN Controller
The Standalone DSRC IEEE 802.11P supports vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) safety communication. However, the DSRC communication range is relatively limited (1000 m), and it can only enable communication in high-mobility cars, up to 120 miles per hour. It does not provide multi-hop communication between vehicles. By analyzing various communication scenarios, the SDN controller aids in extending the range of communication [24,25].
Figure 2 depicts the architecture of the OpenFlow SDN controller to select the networks based on different vehicular communication scenarios. There are two modes of communication mentioned in the architecture, i.e., V-to-V and V-to-I. Mostly in V2V, communication takes place only within a limited 1000-m range. Hop-to-hop communication is supported with the help of DSRC communication, when all the vehicles should be in the range of 1KM. In the above architecture, vehicle V2 can communicate with vehicle V4 with the help of V3. The range between V2 and V4 is 2 km. In this scenario, DSRC cannot provide direct communication. Therefore, hop-to-hop communication occurs between V2 to V3 and V3 to V4 [26,27].
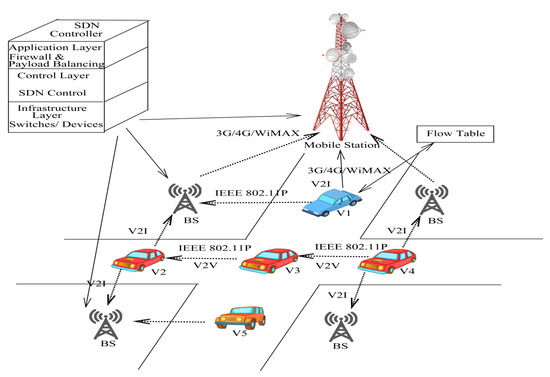
Figure 2.
Different vehicular communication scenarios using OpenFlow SDN controller.
The application layer, control layer, and infrastructure layer are all controlled by the SDN controller. Each layer performs its own set of tasks. The top application layer aids load balancing by filtering unauthorized car users through the firewall. The control layer is responsible for general control of the OpenFlow SDN, whereas the infrastructure layer contains switches and devices that connect vehicles and base stations. The flow table is used to keep track of many communication data, such as the distance between neighboring vehicles and the base station, as well as the direction and speed. Vehicle V1 can use the data in the flow table to seek a nearby network by examining the scenario. Vehicles can support two forms of communication: DSRC to DSRC with the use of a base station (BS) and DSRC to mobile networks hybrid communication (3G, LTE, WiMAX). Mobile networks, on the other hand, offer a wide choice of communication options but do not support significant mobility [28,29].
When the vehicle delivers communication over a distance of more than 1 km, the design shown in Figure 2 is used. As a result, Hybrid DSRC/WiMAX allows users to communicate across a distance of up to 10 km using RSU. Without an SDN controller, combining IEEE 802.11P and IEEE 802.16D is a difficult operation. However, the IEEE standards are not the same. Uplink and downlink communication use the same physical layer settings. The transmission of OFDM signals faces several hurdles, including a 10 MHz bandwidth, a common 5.9 GHz RF, and subcarrier matching. The DSRC 64 FFT subcarriers may be equal to the WiMAX 256 FFT subcarriers in our proposed system if other modulation methods and padding bits are used [3,30,31].
2.1.2. Mathematical Model for Physical Layer OFDM
Both uplink and downlink operations are possible with hybrid vehicular communication. Uplink DSRC to other communication networks is taken into consideration. For one OFDM transmission, DSRC required 64 FFT subcarriers, while mobile networks required 256 FFT subcarriers. With DSRC OFDM, these FFT subcarriers are matched with padding zeros, making them comparable to the mobile network subcarrier [32,33,34]. Each OFDM symbol associated with I/Q signaling in this mathematical model will be:
For DSRC 64 FFT:
For 256 FFT:
For example, I stands for in-phase and Q stands for quadrature phase. The employment of two sinusoids with the same frequency and a 90° relative phase shift is referred to as I/Q signaling. When combining two separate wireless networks, such as IEEE 802.11P vehicular communication and IEEE 802.16 WiMAX, common physical layer orthogonal frequency division multiplexing (OFDM) parameters are needed to establish communication in order to enhance the range of CR-based vehicular networks. All observed RF signals are orthogonal in nature, and that can be modulated in amplitude, phase, and frequency by summing amplitude-modulated I/Q signals. Quadrature modulation is a type of modulation that uses both I and Q signals. Quadrature phase-shift keying is achieved by adding I and Q carriers that have each been multiplied by +1 or −1 in accordance with the incoming digital data [31]. For downlink transmission, i.e., mobile network to DSRC, the 16 QAM modulation type estimates the FFT subcarrier value. The OFDM 256 FFT physical layer is modulated with 16 QAM modulation. As a result, each 256 FFT OFDM signal is modulated with 14 bits per symbol, making the DSRC 64 FFT subcarrier comparable. The 64 FFT DSRC OFDM signal = 256 × 1/4 bits (16 QAM). The 64 FFT subcarriers are separated into 52 used data carriers, 4 pilot subcarriers, and 8 unused subcarriers for DSRC. In IQ signaling, the 52 data carrier is modulated into +26 and −26 FFT. The 256 FFT carrier is divided into 200 usable data carriers, and the remaining 56 subcarriers are utilized for pilot and unused subcarriers in IEEE 802.16. In CR-based mobile networks, OFDM is employed as a digital modulation technique. Here, ∆f denotes the frequency separation between subcarriers, and the carrier signal 2πk ∆f (t) at fc, where fc is the determining factor for which technology is employed. The sent data are represented by Ck, where k is the frequency offset index of the subcarriers for one sample. For DSRC vehicular communication, fc is the common RF frequency of 5.9GHz. In each time domain, f1(t) represents the 64FFT DSRC carrier frequency and f2(t) represents the 256 FFT WiMAX carrier frequency.
After applying I and Q function values from Equations (1)–(4), Ck is derived as follows in Equation (5):
Each carrier frequency Ck can be represented as:
Ck = Ik + j·Qk
Ck is the input data signal, which is modulated to Ik and Qk signaling. The “j” operator is utilized to convert a complex number to √1 (90° phase shift), so Ck = cos(k) + j·sin(k) signaling.
Overall, these studies show the limitations of the existing V2V model for certain futuristic scenarios. Since the future applications in VANET will include multimedia and other real-time streaming between vehicles, we need optimized and enlarged bandwidth communications. Either vehicle industries can utilize new bands by adopting radio frequency regulation bodies or effectively utilizing existing bands. We have proposed a novel scheme DAHP–TOPSIS for a channel decision model for CR-enabled VANET, which falls under the second category to match future needs in V2V communications.
3. Spectrum Management for CR-VANET Using MCDM
CR-VANET is a type of vehicular communication infrastructure that may be used to solve a variety of decision issues. It can also be employed in a variety of communication scenarios. AHP, TOPSIS, ELECTRAE, PROMETHEE, VIKOR, and SAW are only a few of the CR-VANET decision-making models. We used the combination of AHP and TOPIS in this paper. AHP has been improved to become DAHP, which can be used for a variety of situations and services between sender and receiver vehicles. Centralized decision-centralized sensing and centralized decision-co-operative sensing are two network models for implementing the DAHP–TOPSIS channel decision model [34,35].
3.1. Co-Operative Spectrum Management in CR-VANET
There are two different models, as shown in Figure 3a,b, that can be used to perform spectrum sending and decision tasks. In the proposed model, 3.b-based infrastructure needs to be established to take channel decision, since the available RSU enabled, with consistent and uninterrupted power supply and enough computational ability, this model chosen to take channel decision.
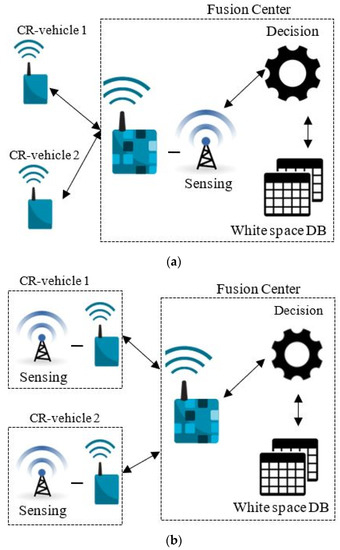
Figure 3.
(a) Centralized decision and sensing, (b) centralized decision–co-operative sensing.
3.2. Channel Decision Based on Channel Ranking
Rank-based decision-making is used to decide the channel to communicate with other networks based on weights assigned to the channel. Hybrid combined TOPSIS and DAHP techniques are used for decision-making and initiating communication to suitable networks. TOPSIS Algorithm is depicted in Algorithm 1.
| Algorithm 1: TOPSIS algorithm |
| C—Evaluation criteria, C = {c1, c2,…cm} M—No. of criteria’s involved n—No. of alternatives Vij—Ai value with respective channel Cj Wm—weight’s derived of ‘m’ criteria’s, 0 ≤ Wm ≤ 1 Dmat—decision matrix quanitative Ψ—matrix for normalized decision Dmat, 0 ≤ Vij ≤ 1 Ω—Weighted decision matrix Dmat, 0 ≤ Vij ≤ 1 —TOPSIS alternative weights |
| Stage-1: |
| i. Data matrix for quantitative normalization |
| Let, DataMatrix = [Vij]m×n |
| Ψ = |
| if (C’s objective is benefit) |
| Or (C’s cost objective) |
| End ii. Calculation of weighted |
| Stage-2: |
| iii. Positive Ideal Solutions |
PIS(j*) = Max(Ωij*), where i = 1,2, …n, j = 1,2, …m,
|
| Negative Ideal Solutions
NIS(j*) = Min(Ωij*), where i = 1,2,3,…n, j = 1,2,3,…m,
|
|
iv. Positive Ideal matrix
|
| Negative Ideal matrix
|
| v. Calculating weight of alternatives
—rowSum of Positive idle matrix as in Equation (11) —rowSum of Negative idle matrix as in Equation (12) |
3.2.1. DAHP Data Services Implementation Procedure
The channel decision factor deals with some quality metrics to analyze the weight of the channel for decision-making in terms of signal-to-noise ratio, bit error interference ratio, and bandwidth. Optimizing the channel strength needs to give priority to major channel parameters. Initially, AHP generated a rating from 0 to 1 to improve the better channel selection. Scores need to be compared to produce a better decision-making strategy. The AHP rating parameters are as follows.
3.2.2. Qualitative Analysis for AHP
- Matrix Z for Comp_Rating;
- Z2 for Square matric calculation;
- Search SumR (Sum of Row) (normalized).
The DAHP algorithm is depicted in Algorithm 2 to show preference to the order for weights from Table 1. The Matrix Z is used for Saaty weights to give preference in order to improve the efficiency of algorithms. The calculated comparative and calculated matrix tables are used for better decision-making. Table 2. Parameters for ordering preference for decision making.
| Algorithm 2: DAHP algorithm |
| n: Channels required for sensing |
| m: No. of deciding factors |
| m!: Total possible order of deciding factors |
| k: filtered deciding factors |
| q: rounds required for training |
| Where, q—restricted based on sensing vehicle limitation || ranges between 1 to (m!-k) |
| Stage I. Fix_Factors_weight |
| If: CR-vehicle data services (video/audio/text) |
| PR_activity: poisson_rnd( ) |
| { Min: 0.2 to max: 0.6 } |
| Train_rounds DAHP: (T = 1, T < q, T++) { |
| Intialize { |
| Saaty_levels (F): 1 to 9; |
| req_factors(m);} |
| Build matrix ‘Z’ from m: x: m; |
| Assign performance_factors_for_Rating (1 to m); { |
| Comp (Fmx, Fmx+1), 1 ≤ x < m; |
| Z[i][j] = (Fmx/Fmx+1); } |
| Calculate_sumof_row: ; |
| Until(values(small)(Norm(rSumR(i))) { |
| Normalized sumof_row: ; } |
| End |
| Consistency checking: |
| Order_priority(performance_factors):max→ min(Normal(SumR(i)); |
| Ratio of consistency: CR = CI/RI; //decision for validation |
| If CR is less than 0.10: Decision towards Consistent |
| Else: Decision towards In-Consistent |
| , (RI)((2:10) m → from 0 till 1.51) |
| γmax = . Normal_SumC[j]T |
| End |
| II. Finding Priority order of parameters: |
| channel_wgt → Row_Sum(SumR); //Decision model for channel |
| TOPSIS-I for CCRN fit model |
| Best outcomes Initialization: |
| Let, BestComp(n) → n channels for Best Computation time |
| WFRatio(n) → n channels for Worst fault ratio |
| BestRelativeSD(n) → n samples for Best relative standard deviation |
| BAT(n) → n channels for best throughput |
| If (BestComp(n) > comp_time(t)) |
| BestComp(n) = comp_time(t); |

Table 1.
AHP rating.
Table 2.
Parameters for ordering preference for decision making.
Input data for taking channel decision contains different units and ranges. Initially comparative matrix Z[i][j] should be generated where deciding parameters as shown in Table 2 will be compared with one another. Normalizing is an operation which will convert the table values between 0 to 1.
where,
Z[i][j]—comparative matrix for taken deciding parameters for channel.
3.2.3. Calculation of Normalized Row Sum
Square matrix for Z[i][j] has to be calculated then each row sum should be calculated as in Equation (17),
where i is from 1, 2, …, m: number of rows
The above Equations (16) and (17) has been applied to Table 3 and Table 4, and sum of row calculated as in Table 5.
Table 3.
Comparative rating Matrix “Z”.
Table 4.
Normalized weighted comparative matrix.
Table 5.
Sum of row (SumR) for matrix comparison.
The sum of row SumR(i) is normalized to calculate the priority of ordering mentioned in Equation (18).
Normalized_SumR(i) = SumR(i)/total (SumR(i)), i = 1, 2, …, m
Therefore:
Finally, by considering the various factors, the performance is analyzed by calculating the weight. The consistency ratio is calculated by dividing an index of consistency (CI) and random (RI) values, and it is mentioned in Equation (20). In addition, n is the number of DAHP factors. Calculated weighs for performance factors are presented in Table 6.
Table 6.
Calculated weights for performance factors.
Therefore, n and R values of RI are n = 1, 2, …, 8, with respective 0.0, 0.0. 0.5, 0.9, 1.1, 1.2, 1.3, 1.4. can be calculated as average(rSum) of weighted comparative matrix.
By combining Equations (20) and (21) various data services, such as data, audio, and video, can be provided by calculating CRAT values, and they are less than 0.1 in value, as mentioned in Table 7.
Table 7.
CRAT values calculated for sample criteria.
Computation of the normalized sum of row is calculated in Equation (22).
The sum of normalized row SumR(i) helps to reduce the weight of each channel by DAHP qualitative analysis metrics by calculating the parameters of text, audio, and video, and it is mentioned in Table 8.
Table 8.
DAHP qualitative order preference.
By comparing all qualitative parameters, we can see in Table 8 that packet loss ratio is comparatively less in text data when compared with audio and video data. Therefore, channel quality is compared by transmitting all kinds of data formats, which are mentioned in Figure 4. The signal-to-noise ratio is the maximum weight of CAV. Therefore, CAV helps to decide the channel quality for all data services.
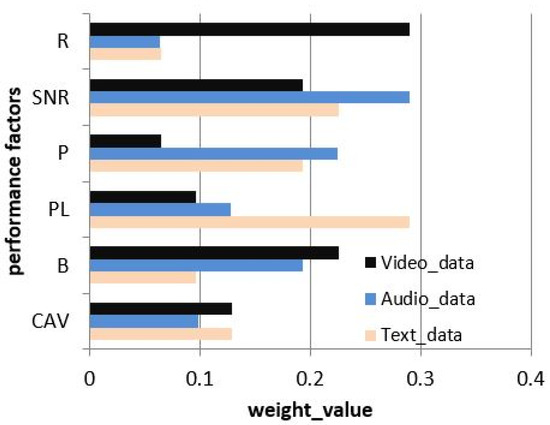
Figure 4.
Performance factor weight comparison with multiple scenarios.
3.3. TOPSIS Channel Ranking
TOPSIS channel ranking is used to eliminate the choice of choosing poor weights in terms of providing good qualitative data service to the channels. Enhanced TOPSIS helps to provide the best decision-making strategy for channel selection.
TOPSIS with DAHP for Providing Qualitative Data Service
The ranking method can be followed in TOPSIS to enhance the weight of the decision matrix to choose a better channel for communicating. Combining DAHP with TOPSIS provides a better qualitative decision matrix for all data service applications. There are three steps to follow to provide better qualitative service in TOPSIS: channel properties collection, normalizing the decision matrix, and qualitative channel ranking.
Table 9 depicts the simulation parameter of the proposed model by considering 20 to 200 channels in different weights and normalized values as shown in Equations (6) and (23), the below X(i,j) represented as matrix in Table 10:
Table 9.
Simulation parameters for channel properties.
Table 10.
Normalized matrix for text services.
Therefore, positive- and negative-ideal solutions as in Equations (9) and (10) help to calculate the weight mentioned in Table 10. Table 11 and Table 12 analyze the channel by using text services. As per Equations (11) and (12), Table 11 and Table 12 has been calculated.
Table 11.
Positive-ideal matrix for text.
Table 12.
Negative-ideal matrix for text services.
Therefore, the same methodology as with text services, positive- and negative-ideal solutions, helps to calculate the weight mentioned in Table 13. Table 14 and Table 15 analyze the channel by using audio services.
Table 13.
Normalized weighted matrix for audio service.
Table 14.
Positive-ideal matrix for audio.
Table 15.
Negative-ideal matrix for audio.
Therefore, the same methodology used for text and audio services, positive- and negative-ideal solutions, helps to calculate the weight mentioned in Table 16. Table 17 and Table 18 analyze the channel by using video services.
Table 16.
Video: normalized weighted matrix.
Table 17.
Positive-ideal matrix for video services.
Table 18.
Negative-ideal matrix for video services.
By implementing a rank-based channel selection process using DAHP–TOPSIS, all kinds of data services, such as text, audio, and video, are illustrated by comparing them with 20 channel ranks. In all CR-VANET scenarios, it is possible to communicate with various kinds of services, and channels 5 and 20 provide the best text, audio, and video data transmission by utilizing the optimized channel weight, and the same is represented as a table to display each channel and its rank in Table 19 as per Equations (13)–(15).
Table 19.
DAHP–TOPSIS channel comparison for text, audio, and video (20 channels).
4. Performance Evaluation of DAHP–TOPSIS
4.1. Performance Analysis by Calculating Computation Time
The proposed DAHP–TOPSIS methodology provides a better result by comparing other channel selection techniques, such as DAHP–SAW and random DAHP–MOORA. SAW and MOORA also can be integrated with DAHP to take channel decisions. SAW and MOORA are lightweight techniques to handle a smaller number of alternatives. Computation time and delay are much lower in the proposed techniques by comparing them with techniques and the comparative qualitative metrics mentioned in Table 20. The results of Table 20 are visualized in plots in terms of best, worst, and average cases, as shown in Figure 5, Figure 6, Figure 7 and Figure 8.
Table 20.
Analyses of computation time (msec).
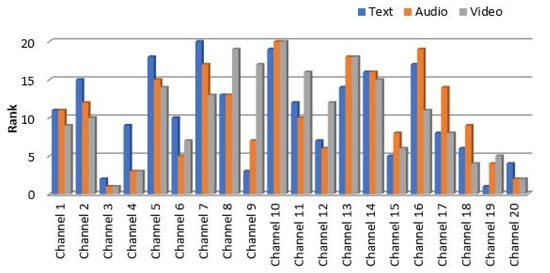
Figure 5.
DAHP–TOPSIS for channel ranking.
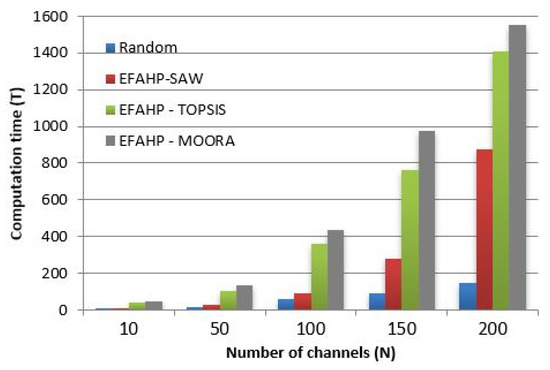
Figure 6.
Best case computation time.
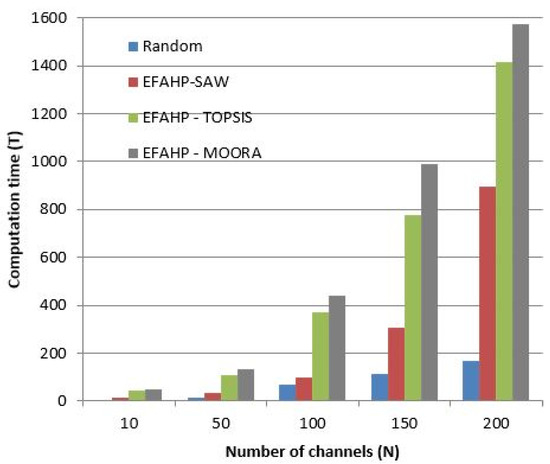
Figure 7.
Worst case computation time.
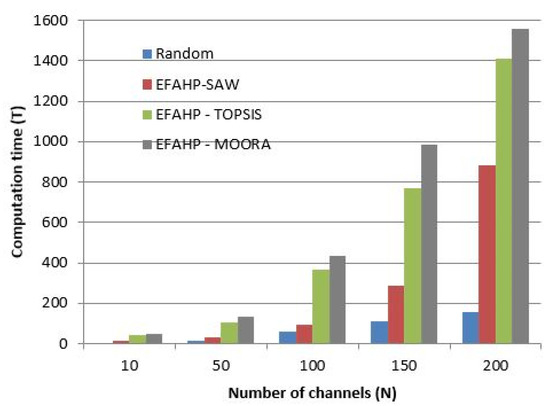
Figure 8.
Computation time for an average case.
4.2. Handoff Analysis in the Proposed DAHP–TOPSIS
The operational cost for handoffs is much costlier compared with other operations, especially in CR-VANET. By considering 20, 100, and 200 channels used to analyze the various spectra utilized in CR_VANET handoffs, comparative analysis of DAHP–TOPSIS, DAHP–MOORA, DAHP–SAW, and random helps to identify the best quality of service provided by CR-VANET in terms of average end-to-end delay, packet delivery ratio, packet loss ratio, and control overhead. Figure 9 and Figure 10 depict the comparison of various channel selection respective handoff schemes for PU low traffic = 0.2 and PU high traffic = 0.6. Table 21 depicts the various handoff strategies by varying types of data, channel size, and traffic in PU, i.e., low = 0.2, high = 0.6.
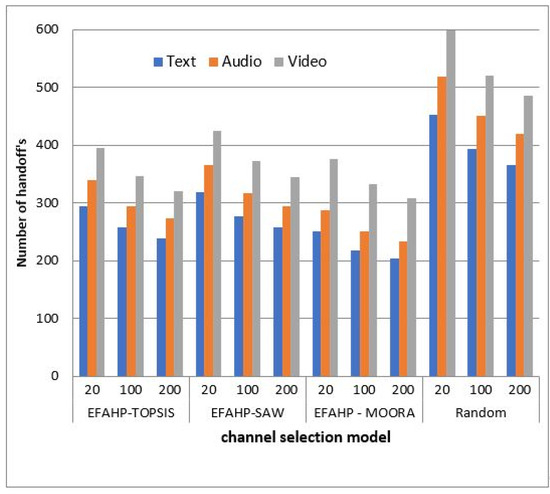
Figure 9.
Channel selection vs. handoff schemes for PU low traffic = 0.2.
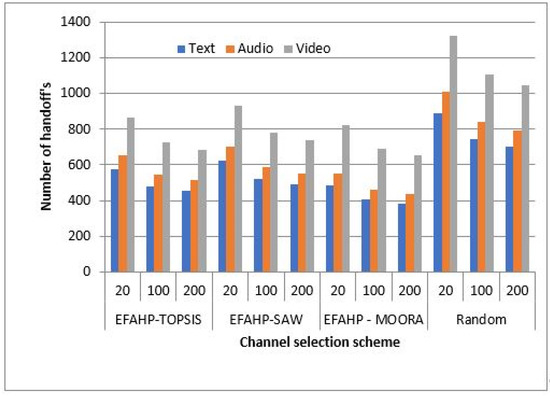
Figure 10.
Channel selection vs. handoff schemes for PU low traffic = 0.6.
Table 21.
Various handoff processes for comparing traffic, data service and channel size decision.
5. Conclusions
OpenFlow-controlled CR-IoV enables efficient vehicular communication in high-mobility situations based on the scenario of vehicle direction, speed, and range in various handoff scenarios. Due to the high mobility of cars, identifying the available network and routing of vehicles is a critical task that can be performed using vertical handoff and the OpenFlow SDN controller. DAHP–TOPSIS is used to analyze the packet delivery ratio and channel selection for CR-VANET by comparing it to other techniques, such as DAHP–TOPSIS, DAHP–MOORA, DAHP–SAW, random packet loss, and rank-based channel selection. Proposed DHAP–TOPSIS has been validated along with parallel competing techniques in the MCDA domain. Due to the speed and route failure of the vehicle in terms of low traffic of 0.2 and high traffic of 0.6, the decision of rank-based channel selection and packet delivery ratio fluctuates from time to time. CR-VANET delivers various data services, such as audio, video, and text, on roughly 20 to 200 channels in various scenarios. Text services perform better in the CR-VANET than audio and video services when employing DAHP–TOPSIS, and they cost less than audio and video services. Table 20 and Table 21 provide the findings on the number of handoff conditions and computation time in the CR-VANET. The proposed DAHP–TOPSIS system employs CR-VANET to provide communication to vehicle users. It may be used to address a variety of societal and environmental issues, including traffic congestion control, safety applications, such as driver assistance and automatic crash area notification, and transportation safety in handoff circumstances using an SDN-controlled vehicular network.
Author Contributions
V.D.K. and M.A., writing, original draft preparation, designing, analysis, editing. L.J., I.U., D.I. and O.G., review, editing, investigation. All the authors also contributed to writing, reviewing, and structuring the work. All authors have read and agreed to the published version of the manuscript.
Funding
No funding was involved in this research.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Kumar, V.D.; Kandar, D.; Paul, B.S. Physical layer design for image transmission between WiMAX/DSRC system. Microsyst. Technol. 2017, 23, 659–668. [Google Scholar] [CrossRef]
- Huo, L.; Jiang, D.; Zhu, X.; Wang, Y.; Lv, Z.; Singh, S. An SDN-based fine-grained measurement and modeling approach to vehicular communication network traffic. Int. J. Commun. Syst. 2019, e4092. [Google Scholar] [CrossRef]
- Kanti, J.; Tomar, G.S.; Bagwari, A. A Novel multiple antennas based centralized spectrum sensing technique. In Transactions on Computational Science XXIX. Lecture Notes in Computer Science; Gavrilova, M., Tan, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10220. [Google Scholar]
- Lai, C.; Lu, R.; Zheng, D. Achieving Secure and Seamless IP Communications for Group-Oriented Software Defined Vehicular Networks. In International Conference on Wireless Algorithms, Systems, and Applications; Springer: Copenhagen, Denmark, 2019; pp. 356–368. [Google Scholar]
- Arif, M.; Guojun, W.; Bhuiyan, T.W.; Jianer, C. A survey on security attacks in VANETs: Communication, applications, and challenges. Veh. Commun. 2019, 19, 100179. [Google Scholar] [CrossRef]
- Habibzadeh, A.; Moghaddam, S.S.; Razavizadeh, S.M.; Shirvanimoghaddam, M. Modeling and analysis of traffic-aware spectrum handover schemes in cognitive HetNets. Trans. Emerg. Telecommun. Technol. 2017, 28, e3199. [Google Scholar] [CrossRef]
- Kanti, J.; Tomar, G.S.; Bagwari, A. An improved-two stage detection technique for IEEE 802.22 WRAN. Optik 2017, 140, 695–708. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Zhao, X.; Zhang, M.H.; Wang, Z. DSRC versus 4G-LTE for connected vehicle applications: A study on field experiments of vehicular communication performance. J. Adv. Transp. 2017, 2017, 2750452. [Google Scholar] [CrossRef] [Green Version]
- Kumar, V.D.; Kumar, V.V.; Kandar, D. Data transmission between dedicated short-range communication and WiMAX for efficient vehicular communication. J. Comput. Theor. Nanosci. 2018, 15, 2649–2654. [Google Scholar] [CrossRef]
- Kumar, V.D.; Kandar, D.; Paul, B.S. Uplink Communication Between WiMAX and IEEE 802.11 P Using Sub-Channelization. In Proceedings of the International Conference on Computing and Communication Systems; Springer: Singapore, 2018; pp. 245–254. [Google Scholar]
- Kandar, D.; Kumar, V.D.; Chyne, P. OFDM Simulation in Combined WiMAX/DSRC Mechanism for Intelligent Transportation System. In Emerging Research in Computing, Information, Communication and Applications; Springer: Singapore, 2016; pp. 495–502. [Google Scholar]
- Kumar, V.D.; Chyne, P.; Kandar, D.; Paul, B.S. Performance analysis of hybrid WiMAX/DSRC scenarios for vehicular communication environment. Microsyst. Technol. 2017, 23, 4231–4236. [Google Scholar] [CrossRef]
- Kadhim, A.J.; Seno, S.A.H. Energy-efficient multicast routing protocol based on SDN and fog computing for vehicular networks. Ad Hoc Netw. 2019, 84, 68–81. [Google Scholar] [CrossRef]
- Kalokhe, K.N.; Park, Y.; Chang, S.-Y. Resilient SDN-Based Communication in Vehicular Network. In International Conference on Wireless Algorithms, Systems, and Applications; Springer: Copenhagen, Denmark, 2018; pp. 865–873. [Google Scholar]
- Chen, C.; Li, N.; Li, Y.; Hou, R.; Ren, Z. A Data Dissemination Strategy in SDN Enabled Vehicular Networks. In International Conference on Communicatins and Networking in China; Springer: Copenhagen, Denmark, 2016; pp. 302–313. [Google Scholar]
- Toufga, S.; Owezarski, P.; Abdellatif, S.; Villemur, T. An SDN hybrid architecture for vehicular networks: Application to Intelligent Transport System. arXiv 2017, arXiv:1712.05307. [Google Scholar]
- Kalinin, M.O.; Krundyshev, V.M.; Semianov, P.V. Architectures for building secure vehicular networks based on SDN technology. Autom. Control Comput. Sci. 2017, 51, 907–914. [Google Scholar] [CrossRef]
- Huang, C.M.; Chiang, M.S.; Dao, D.T.; Pai, H.M.; Xu, S.; Zhou, H. Vehicle-to-Infrastructure (V2I) offloading from cellular network to 802.11 p Wi-Fi network based on the Software-Defined Network (SDN) architecture. Veh. Commun. 2017, 9, 288–300. [Google Scholar]
- Zhu, M.; Jiannong, C.; Deming, P.; Zongjian, H.; Ming, X. SDN-based routing for efficient message propagation in VANET. In International Conference on Wireless Algorithms, Systems, and Applications; Springer: Copenhagen, Denmark, 2015; pp. 788–797. [Google Scholar]
- Muhammad, A.; Wang, G.; Wang, T.; Peng, T. SDN-based secure VANETs communication with fog computing. In International Conference on Security, Privacy and Anonymity in Computation, Communication and Storage; Springer: Copenhagen, Denmark, 2018; pp. 46–59. [Google Scholar]
- Musa, B.; Özçelik, I. A 3-stage fuzzy-decision tree model for traffic signal optimization in urban city via an SDN based VANET architecture. Future Gener. Comput. Syst. 2020, 104, 142–158. [Google Scholar]
- Victer, P.; Ganesh, C.; Jayakumar, L. Travelling Salesman Problems Based Assessment: Performance Evaluation of Population Seeding Techniques of Permutation-Coded GA. Int. J. Appl. Metaheuristic Comput. 2018, 3, 55–92. [Google Scholar]
- Jayakumar, L.; Oviya, S.; Shobana, R.; Janakiraman, S. A Novel Node Selection Function for Multilevel Hierarchical Clustering Scheme in Cooperative Cognitive Radio Networks. Int. J. Control Theory Appl. 2016, 9, 221–233. [Google Scholar]
- Kanti, J.; Tomar, G.S. Improved sensing detector for wireless regional area networks. Cogent Eng. 2017, 4, 1286729. [Google Scholar] [CrossRef]
- Kanti, J.; Tomar, G.S. Solution of sensing failure problem: An improved two-stage detector. In Section B: Computer and Communications Networks and Systems, The Computer Journal; Issue 10; Oxford Academic Press: Oxford, UK, 2017; Volume 60, pp. 1–9. [Google Scholar]
- Al-Sherbaz, A.; Adams, C.; Jassim, S. WiMAX-WiFi convergence with OFDM bridge. In Mobile Multimedia/Image Processing, Security, and Applications 2009; International Society for Optics and Photonics: Bellingham, WA, USA, 2009; Volume 7351, p. 73510T. [Google Scholar]
- Arif, M.; Wang, G.; Peng, T.; Balas, V.E.; Geman, O.; Chen, J. Optimization of communication in VANETs using fuzzy logic and artificial Bee colony. J. Intell. Fuzzy Syst. 2020, 38, 6145–6157. [Google Scholar] [CrossRef]
- Arif, M.; Chen, J.; Wang, G.; Geman, O.; Balas, V.E. Privacy preserving and data publication for vehicular trajectories with differential privacy. Measurement 2021, 173, 108675. [Google Scholar] [CrossRef]
- Arif, M.; Wang, G.; Balas, V.E.; Geman, O.; Castiglione, A.; Chen, J. SDN based communications privacy-preserving architecture for VANETs using fog computing. Veh. Commun. 2020, 26, 100265. [Google Scholar] [CrossRef]
- Bagwari, A.; Tuteja, S.; Bagwari, J.; Samarah, A. Spectrum Sensing Techniques for Cognitive Radio: A Re-examination. In Proceedings of the IEEE 9th International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 10–12 April 2020; pp. 93–96. [Google Scholar]
- Koyuncu, H.; Bagwari, A.; Tomar, G.S. Simulation of a Smart Sensor Detection Scheme for Wireless Communication Based on Modeling. Electronics 2020, 9, 1506. [Google Scholar] [CrossRef]
- Moghaddam, S. Cognitive radio in 4G/5G wireless communication systems; Chapter 1. In Introductory: Primary and Secondary Users in Cognitive Radio Based Wireless Communication Systems; IntechOpen: London, UK, 2018; pp. 1–12. [Google Scholar]
- Moghaddam, S.; Ghavami, H. Joint Mode Selection and Resource Allocation in Device-to-Device Communications. Int. J. Sens. Wireless Commun. Control 2018, 8, 217–227. [Google Scholar] [CrossRef]
- Moghaddam, S.; Habibzadeh, A. Cooperative Spectrum Sensing Based on Generalized Likelihood Ratio Test for Cognitive Radio Channels with Unknown Primary User’s Power and Colored Noise. Int. J. Sens. Wireless Commun. Control 2018, 8, 204–216. [Google Scholar] [CrossRef]
- Hosseini, S.; Moghaddam, S. Sub-Optimum Radio Resource Allocation in Vehicle-to-Vehicle Communications Based on A Multi-Step Hungarian Algorithm. In Proceedings of the Workshop on Microwave Theory and Techniques in Wireless Communications, Riga, Latvia, 7–8 October 2021; pp. 86–91. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).