Efficient Energy Management in a Microgrid with Intermittent Renewable Energy and Storage Sources



Abstract
1. Introduction
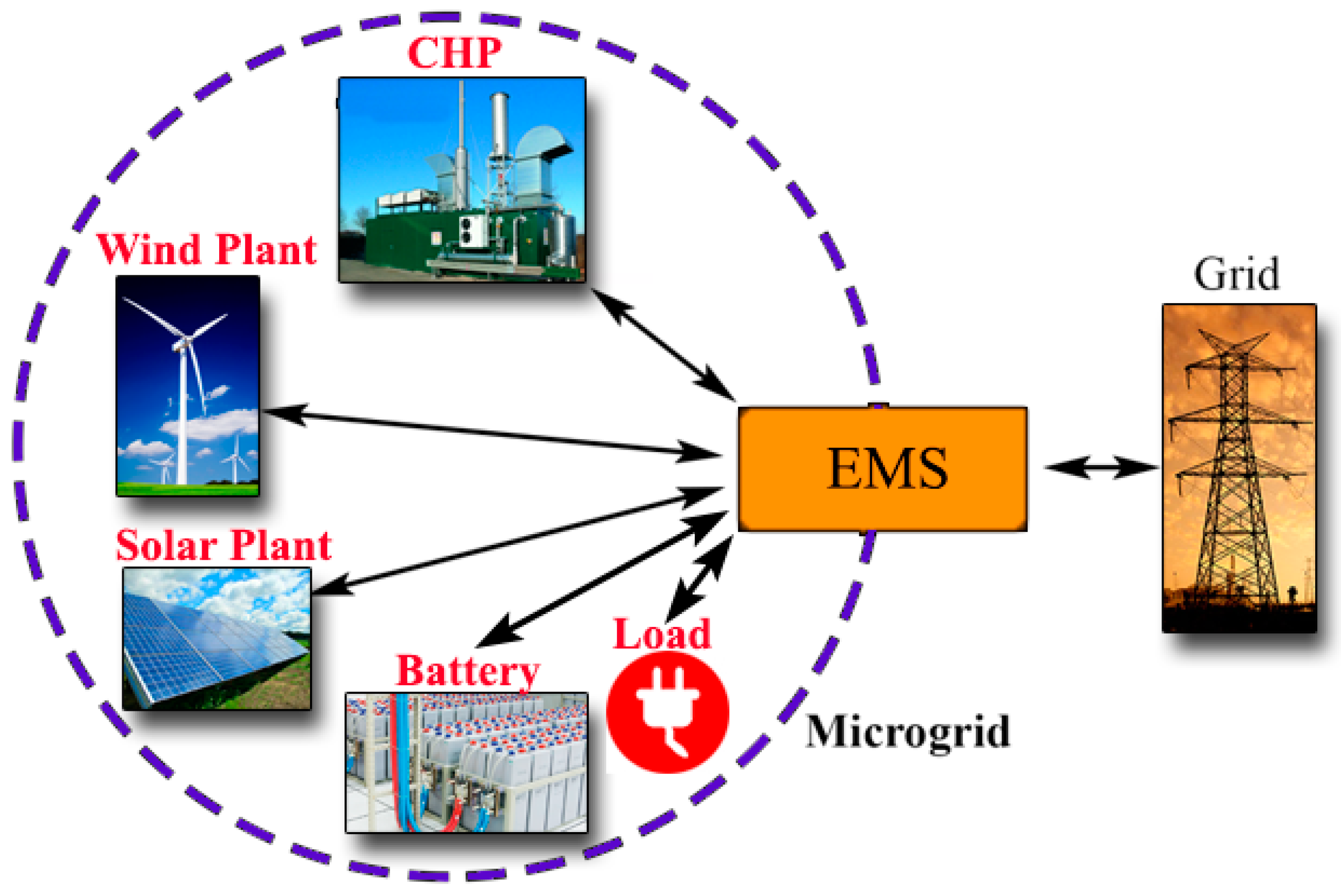
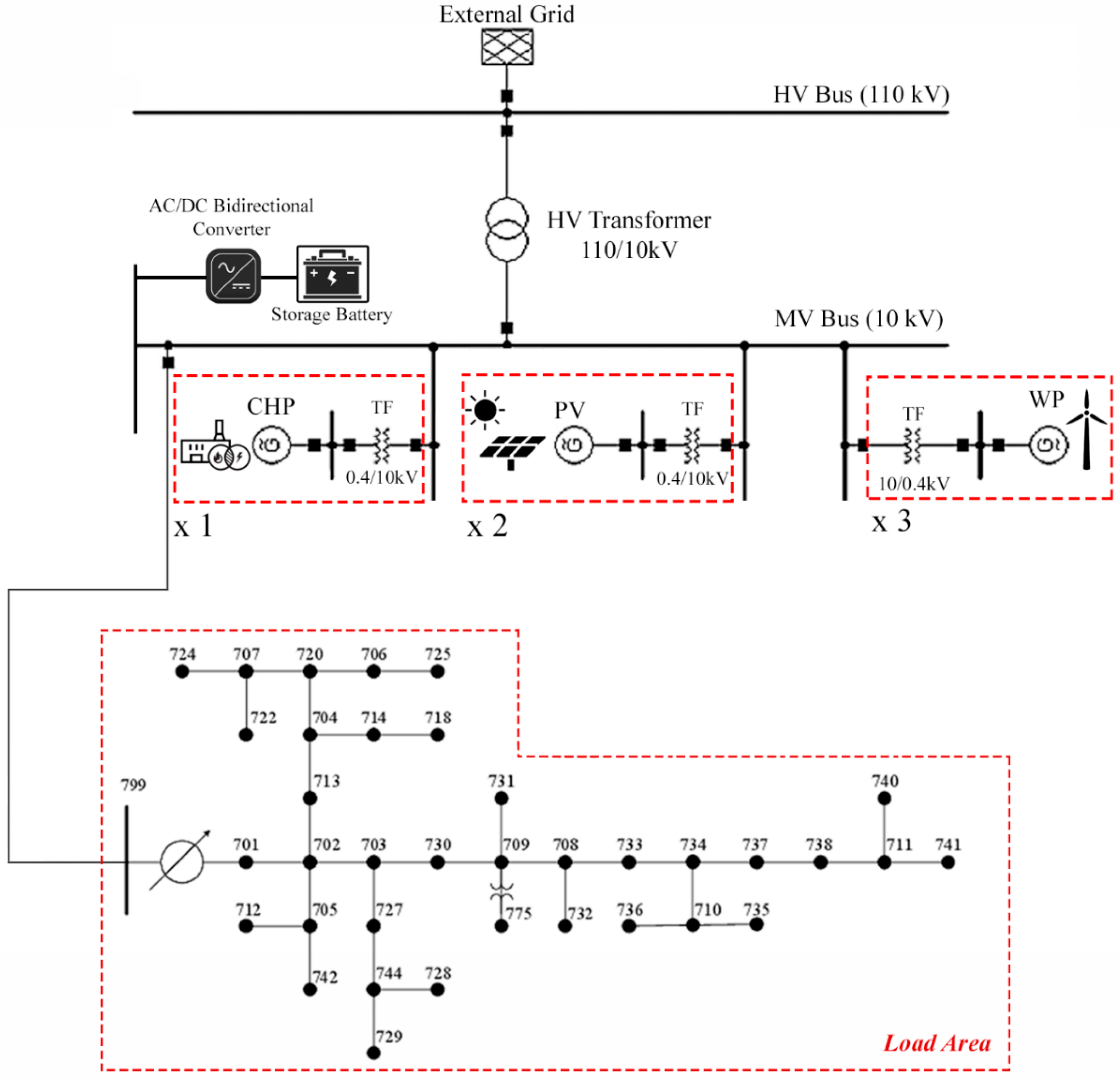
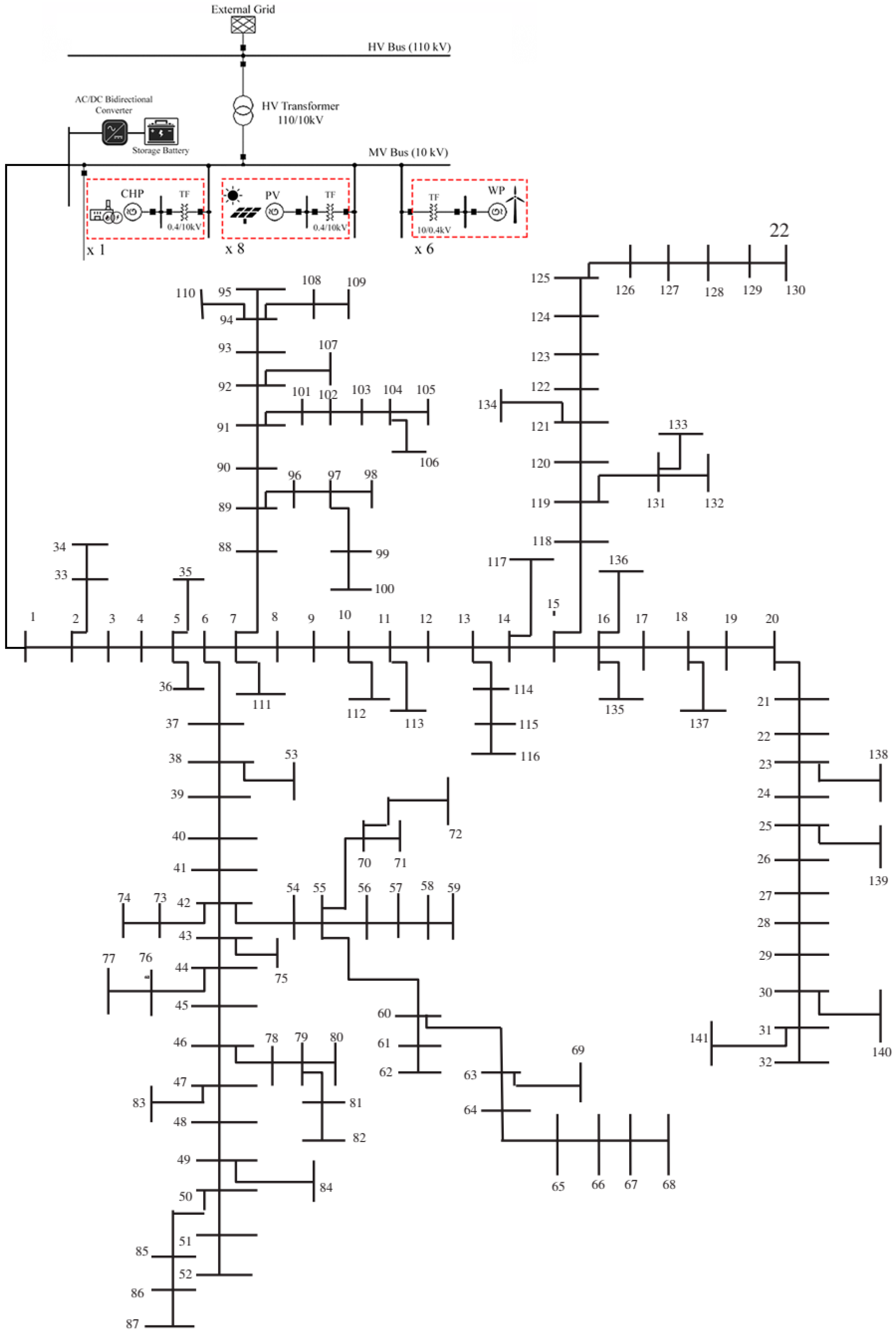
2. Description of the Microgrid
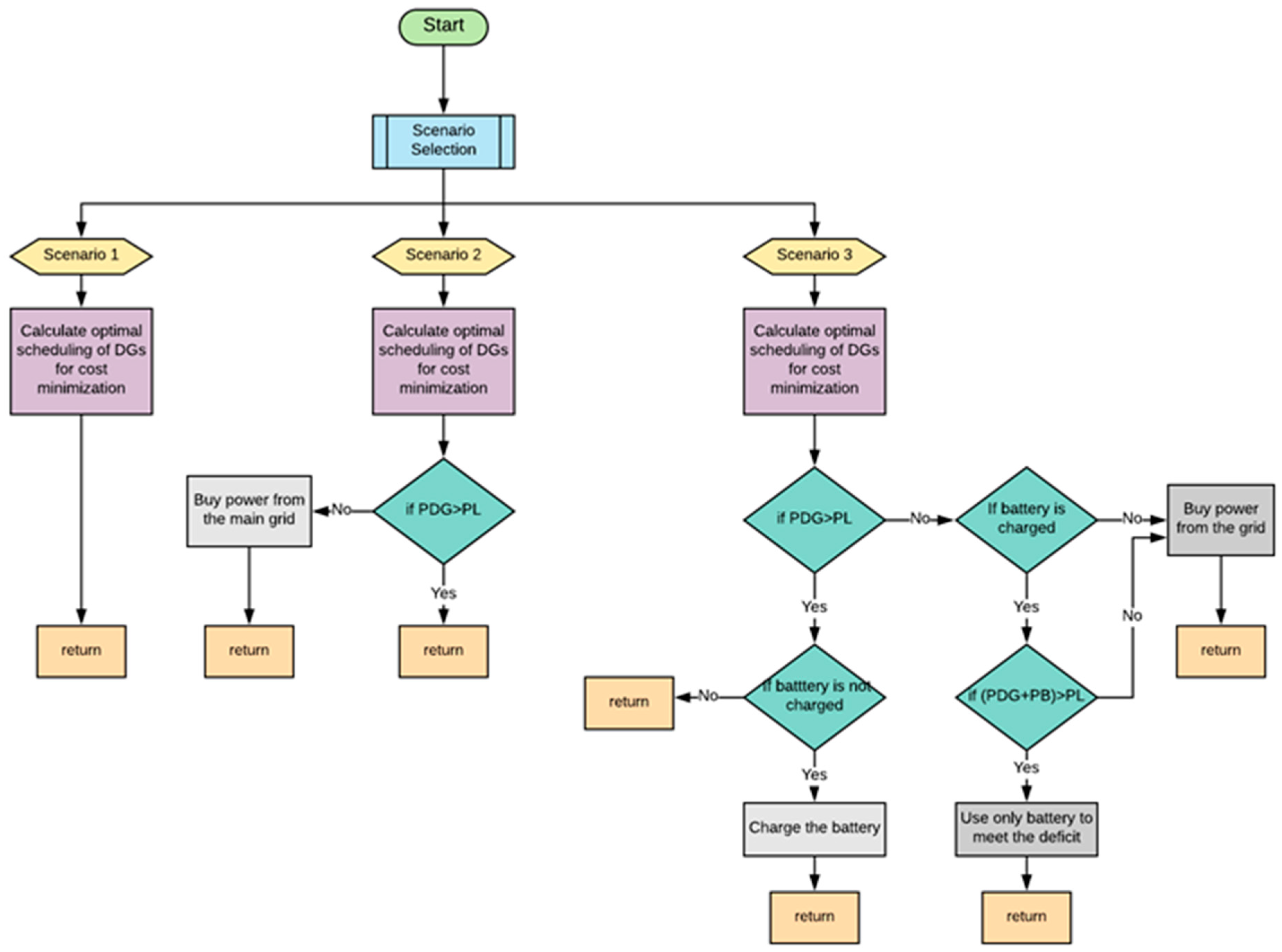
3. Efficient Energy Management System (EEMS)
3.1. Scenario 1
3.2. Scenario 2
3.3. Scenario 3
4. Optimization Problem
4.1. Objective Function
4.2. Design Variables
4.3. Constraints
4.3.1. Power Balance
4.3.2. Power Limits
4.3.3. Battery Limits
5. Optimization Algorithms
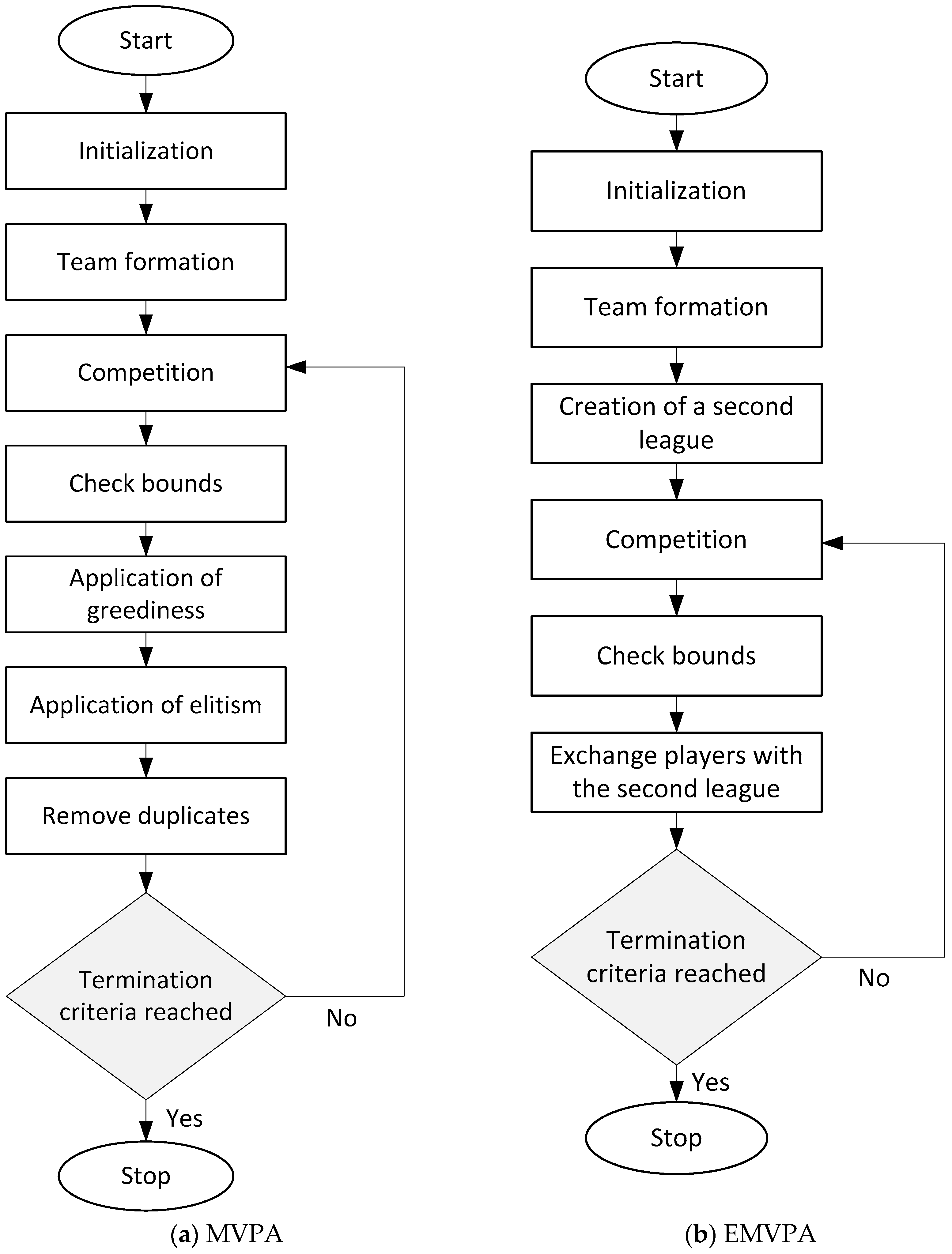
5.1. Most Valuable Player Algorithm
- The objective function (noted as ObjFunction) which can be a mathematical explicit function or a more complicated one;
- The dimension of the problem (noted as ProblemSize) which represents the number of design variables of the treated problem;
- The number of players which is equivalent to the population size in other population-based optimization algorithms (noted as PlayersSize);
- The number of teams in the league noted as (TeamsSize); and
- The maximum number of fixtures (noted as MaxNFix) which is equivalent to the maximum number of iterations in other optimization algorithms.
| for i = 1: TeamsSize | ||
| Teams selection | Select the team number i from the league’s teams | |
| Randomly select another team j from the league’s teams where j ≠ i | ||
| Individual competition | ||
| Collective competition | if against | |
| else | ||
| end if | ||
| end for | ||
5.2. Enhanced Most Valuable Player Algorithm
6. Results and Discussion
6.1. Microgrid #1
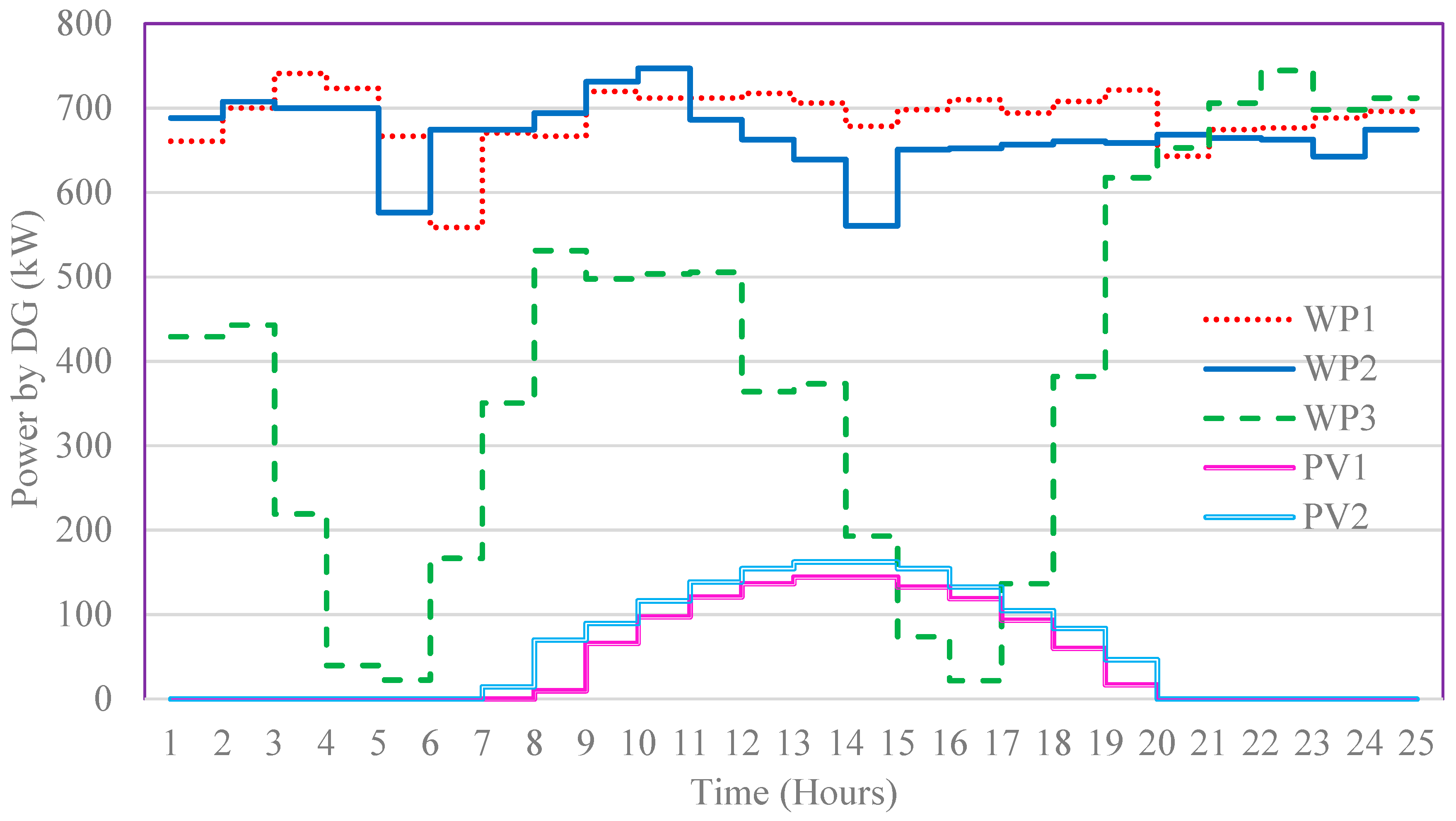
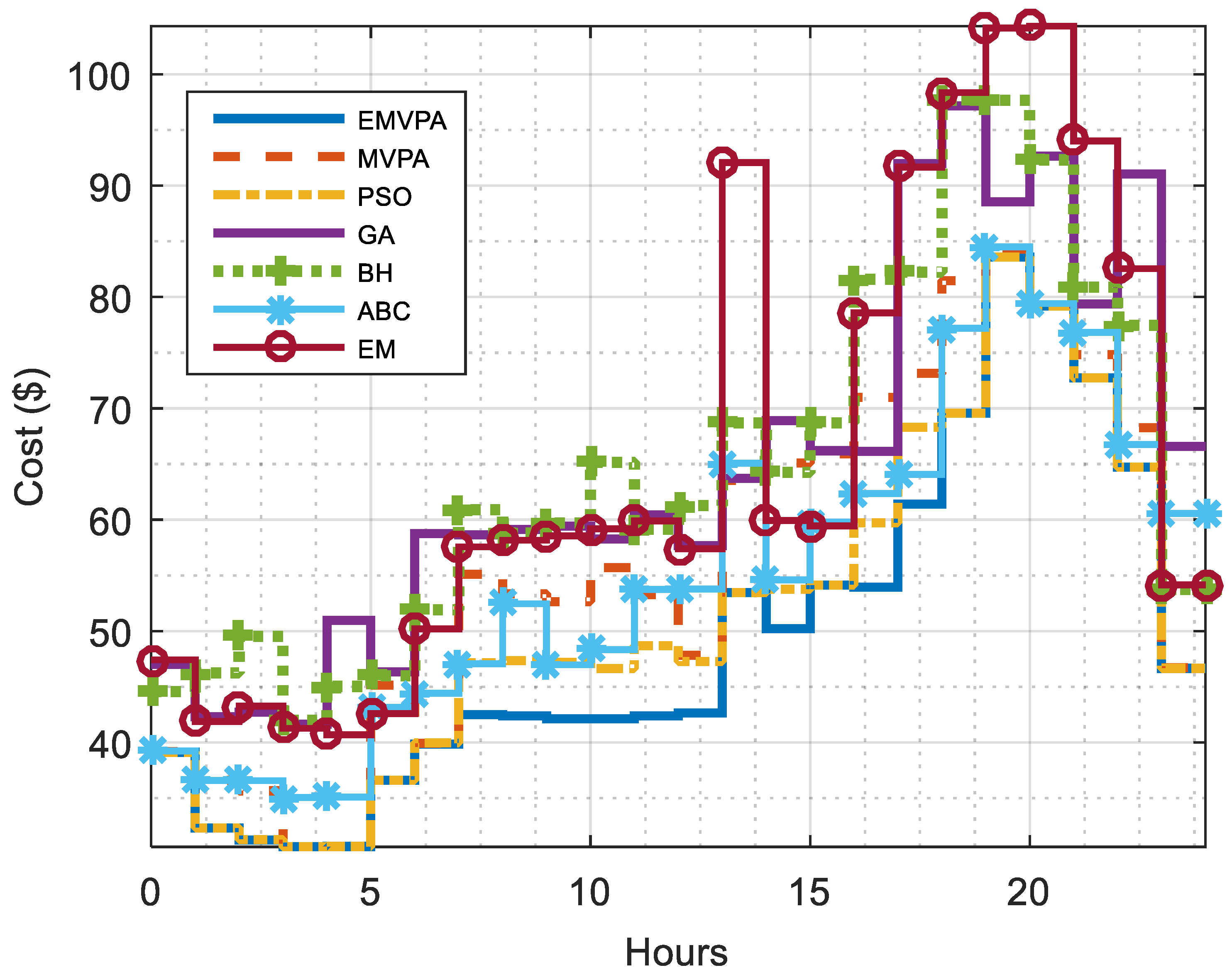
6.1.1. Case 1 (Scenario 1)
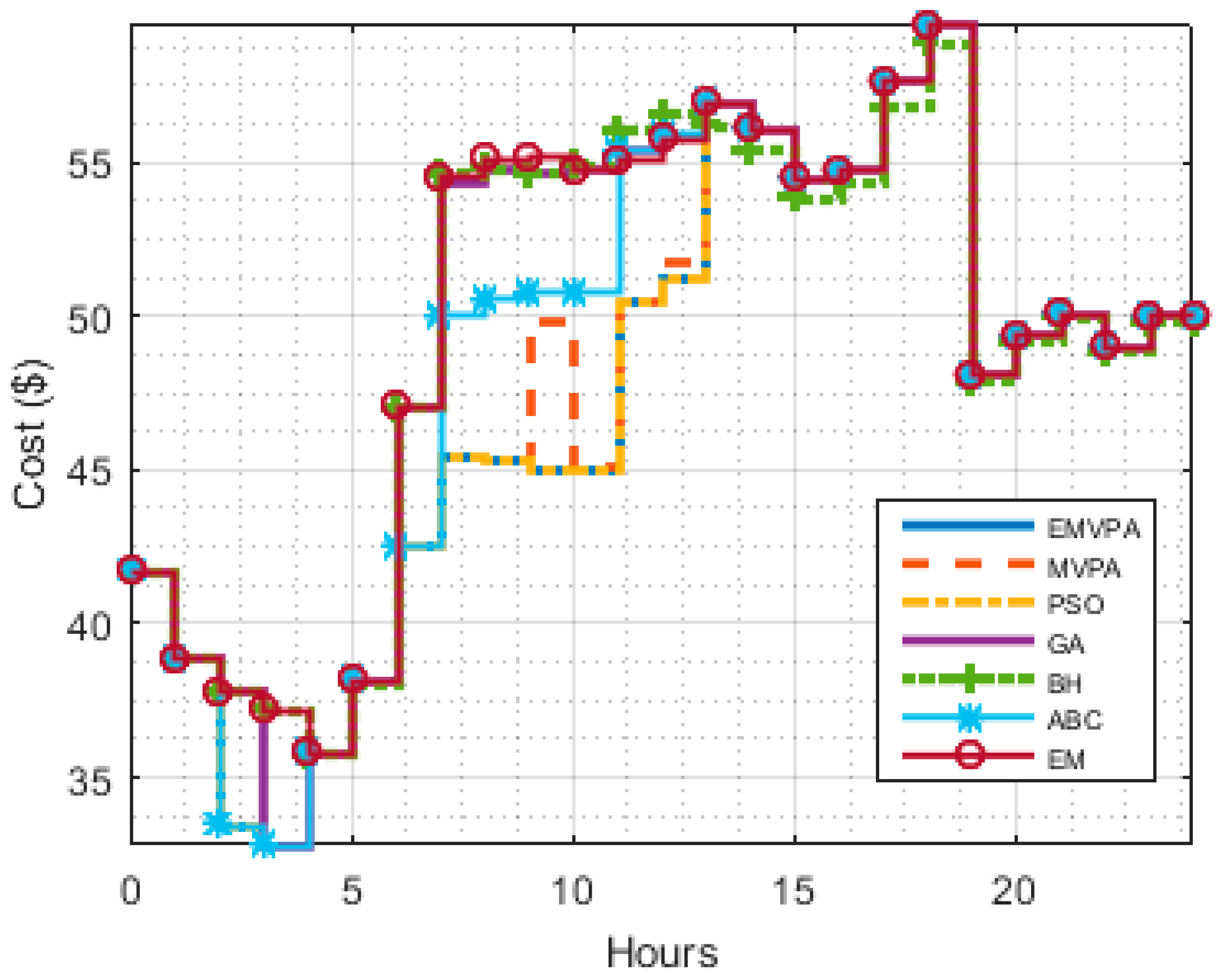
6.1.2. Case 2 (Scenario 2)
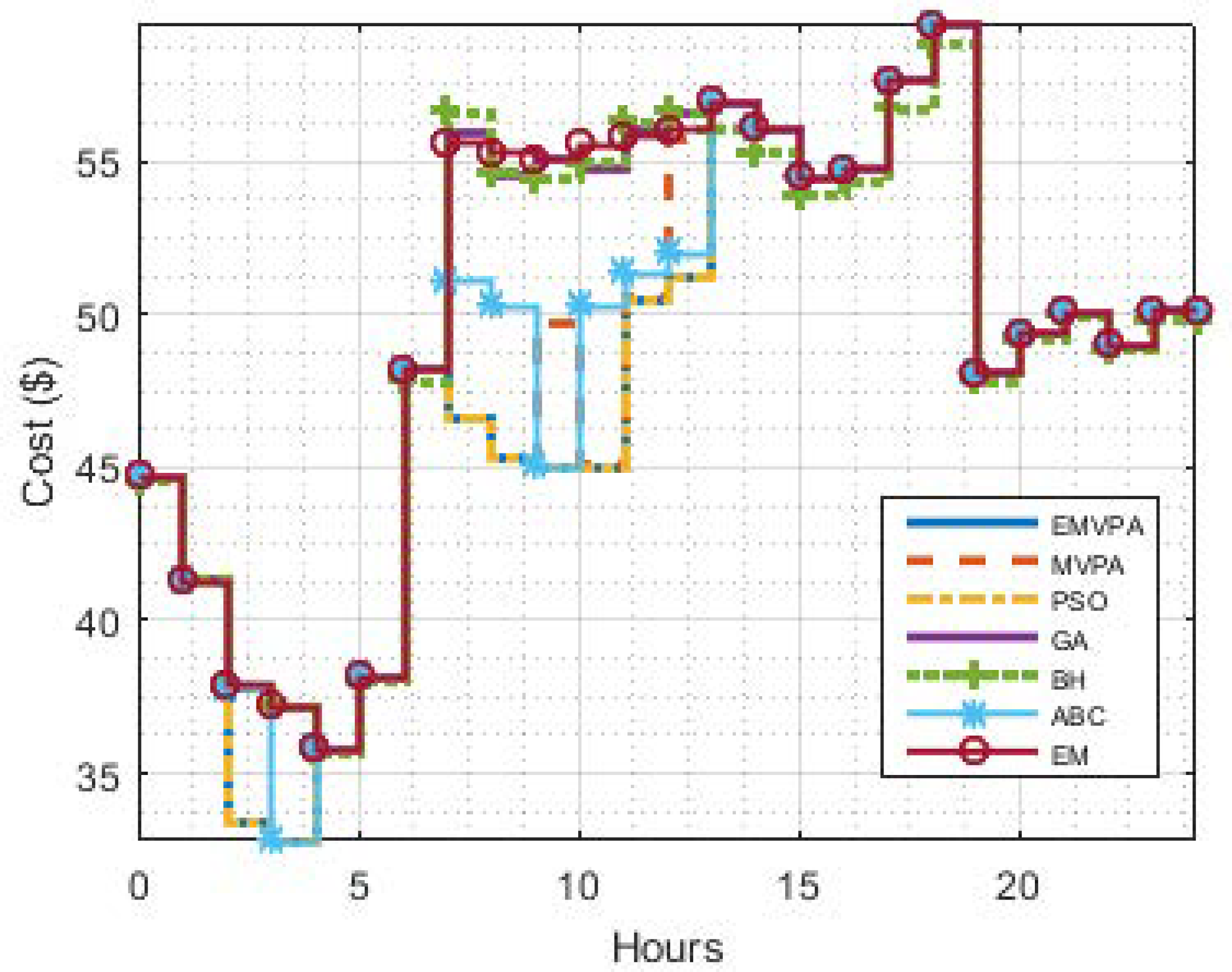
6.1.3. Case 3 (Scenario 3)
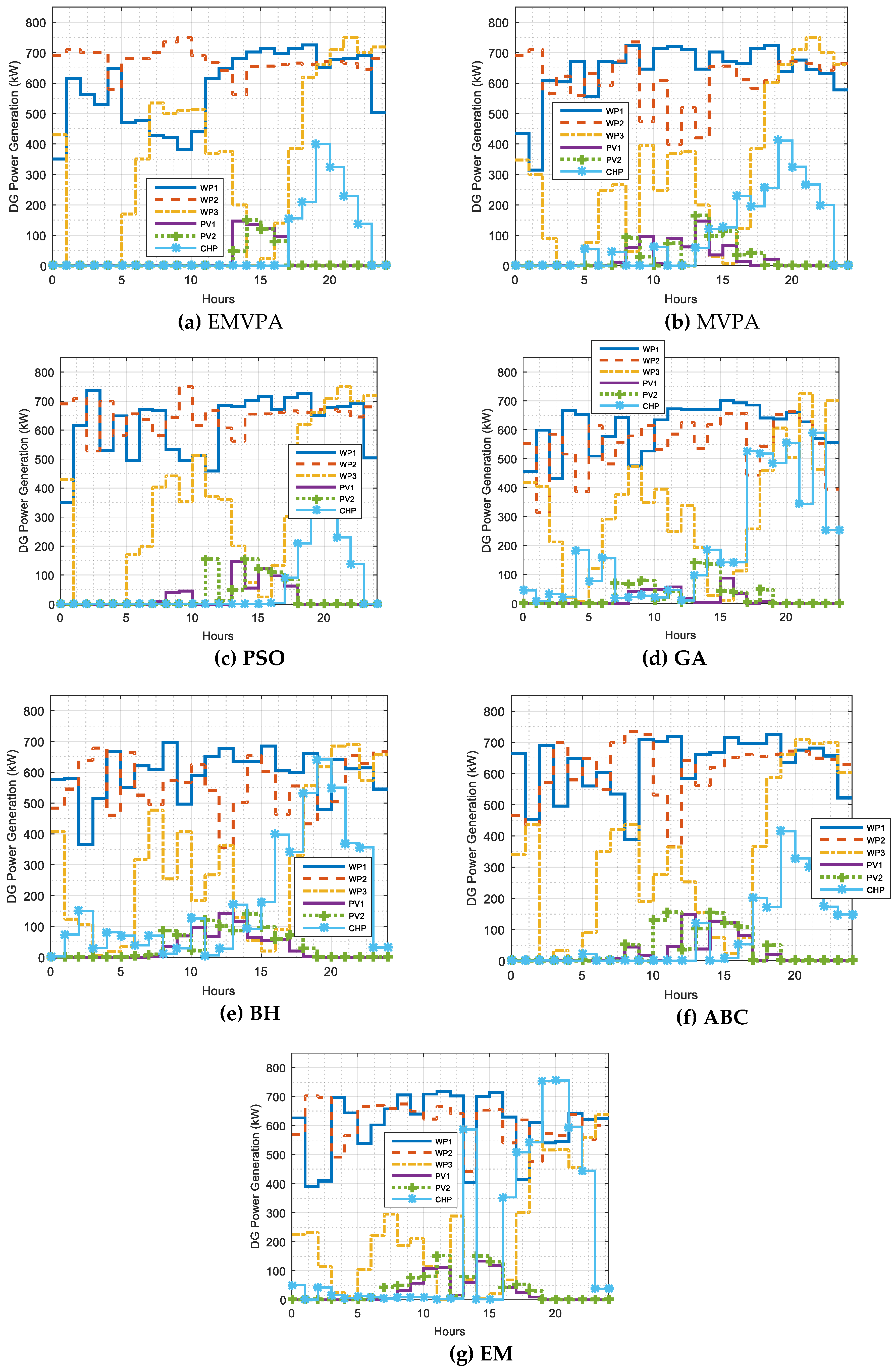
6.2. Microgrid #2
Case 4 (Scenario 3)
6.3. Daily Cost Reduction Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ABC | Artificial bee colony |
| AFSA | Artificial fish swarm algorithm |
| BB–BC | Big bang-big crunch |
| BH | Black hole algorithm |
| Cost in $ | |
| CHP | Combined heat and power |
| DE | Differential evolution |
| DG | Distributed generation |
| EM | Electromagnetism-like mechanism |
| EMS | Energy management system |
| EMVPA | Enhanced most valuable player algorithm |
| GA | Genetic algorithm |
| HS | Harmony search |
| MaxNFix | Maximum number of fixtures which is equivalent to the maximum number of iterations |
| MDP | Markov decision process |
| MILP | Mixed integer linear programming |
| MVPA | Most valuable player algorithm |
| NSGA | Non-dominated sorting genetic algorithm |
| ObjFunction | Objective function |
| Power generated in MW | |
| Power of storage batteries at instant (t) | |
| Maximum charging capacity of the batteries at time (t) | |
| Minimum discharging value allowed for the batteries at time (t) | |
| Power from the grid at instant (t) | |
| Maximum value of power of ith DG at instant (t) | |
| Minimum value of power of ith DG at instant (t) | |
| Total power required by the load at instant (t) | |
| PlayersSize | Number of players which is equivalent to the population size |
| ProblemSize | Dimension of the problem |
| PSO | Particle swarm optimization |
| PV | Photovoltaic |
| TeamsSize | Number of teams in the league |
| WCA | Water cycle algorithm |
| , , and | Cost coefficients |
References
- Kumar, K.P.; Saravanan, B.; Swarup, K.S. Optimization of Renewable Energy Sources in a Microgrid Using Artificial Fish Swarm Algorithm. Energy Procedia 2016, 90, 107–113. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Y.; Guo, Y.; Wang, B.; Wang, H.; Liu, H. A hybrid harmony search algorithm with differential evolution for day-ahead scheduling problem of a microgrid with consideration of power flow constraints. Appl. Energy 2016, 183, 791–804. [Google Scholar] [CrossRef]
- Maulik, A.; Das, D. Optimal operation of microgrid using four different optimization techniques. Sustain. Energy Technol. Assess. 2017, 21, 100–120. [Google Scholar] [CrossRef]
- Crisostomi, E.; Liu, M.; Raugi, M.; Shorten, R. Plug-and-play distributed algorithms for optimized power generation in a microgrid. IEEE Trans. Smart Grid 2014, 5, 2145–2154. [Google Scholar] [CrossRef]
- Amrollahi, M.H.; Bathaee, S.M.T. Techno-economic optimization of hybrid photovoltaic/wind generation together with energy storage system in a stand-alone micro-grid subjected to demand response. Appl. Energy 2017, 202, 66–77. [Google Scholar] [CrossRef]
- Li, B.; Roche, R.; Miraoui, A. Microgrid sizing with combined evolutionary algorithm and MILP unit commitment. Appl. Energy 2017, 188, 547–562. [Google Scholar] [CrossRef]
- Azaza, M.; Wallin, F. Multi objective particle swarm optimization of hybrid micro-grid system: A case study in Sweden. Energy 2017, 123, 108–118. [Google Scholar] [CrossRef]
- Santiago, D.M.L.; Bravo, E.P.C. Multi-objective optimal power management in microgrids: A comparative study. In Proceedings of the 2015 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT LATAM), Montevideo, Uruguay, 5–7 October 2015. [Google Scholar]
- Wasilewski, J. Optimisation of multicarrier microgrid layout using selected metaheuristics. Int. J. Electr. Power Energy Syst. 2018, 99, 246–260. [Google Scholar] [CrossRef]
- Luna-Rubio, R.; Trejo-Perea, M.; Vargas-V_azquez, D.; Ríos-Moreno, G.J. Optimal sizing of renewable hybrids energy systems: A review of methodologies. Sol. Energy 2012, 86, 1077–1088. [Google Scholar] [CrossRef]
- Schutte, J.F.; Koh, B.I.; Reibolt, J.A.; Haftka, R.T.; George, A.D.; Fregly, B.J. Evaluation of a particle swarm algorithm for biomechanical optimization. J. Biomech. Eng. 2005, 127, 465–474. [Google Scholar] [CrossRef]
- Harmouch, F.Z.; Krami, N.; Hmina, N. A multiagent based decentralized energy management system for power exchange minimization in microgrid cluster. Sustain. Cities Soc. 2018, 40, 416–427. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Wang, S.; Su, L.; Zhang, J. MPI based PSO algorithm for the optimization problem in micro-grid energy management system. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017. [Google Scholar]
- Deihimi, A.; Keshavarz Zahed, B.; Iravani, R. An interactive operation management of a micro-grid with multiple distributed generations using multi-objective uniform water cycle algorithm. Energy 2016, 106, 482–509. [Google Scholar] [CrossRef]
- Elsied, M.; Oukaour, A.; Gualous, H.; Lo Brutto, O.A. Optimal economic and environment operation of micro-grid power systems. Energy Convers. Manag. 2016, 122, 182–194. [Google Scholar] [CrossRef]
- Li, P.; Xu, D. Optimal operation of microgrid based on improved binary particle swarm optimization algorithm with double-structure coding. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014. [Google Scholar]
- Litchy, J.; Nehrir, M.H. Real-time energy management of an islanded microgrid using multi-objective Particle Swarm Optimization. In Proceedings of the 2014 IEEE PES General Meeting Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- Kitamura Mori, K.; Shindo SIzui, Y.; Ozaki, Y. Multiobjective energy management system using modified MOPSOS. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005. [Google Scholar]
- Sedighizadeh, M.; Esmaili, M.; Eisapour-Moarref, A. Voltage and frequency regulation in autonomous microgrids using Hybrid Big Bang-Big Crunch algorithm. Appl. Soft Comput. 2017, 52, 176–189. [Google Scholar] [CrossRef]
- Abedini, M.; Abedini, M. Optimizing energy management and control of distributed generation resources in islanded microgrids. Util. Policy Vol. 2017, 48, 32–40. [Google Scholar] [CrossRef]
- De Santis, E.; Rizzi, A.; Sadeghia, A. Hierarchical genetic optimization of a fuzzy logic system for energy flows management in microgrids. Appl. Soft Comput. 2017, 60, 135–149. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, F.; Wang, R.; Zhu, W.; Zeng, X. A stochastic MPC based approach to integrated energy management in microgrids. Sustain. Cities Soc. 2018, 41, 349–362. [Google Scholar] [CrossRef]
- Phurailatpa, C.; Rajpurohit, B.S.; Wang, L. Planning and optimization of autonomous DC microgrids for rural and urban applications in India. Renew. Sustain. Energy Rev. 2018, 82, 1194–1204. [Google Scholar]
- Jiang, F.; Xie, H.; Ellen, O. Hybrid energy system with optimized storage for improvement of sustainability in a small town. Sustainability 2018, 10, 2034. [Google Scholar] [CrossRef]
- Alvarez, E.; Campos, A.M.; Arboleya, P.; Gutierrez, A.J. Microgrid management with a quick response optimization algorithm for active power dispatch. Int. J. Electr. Power Energy Syst. 2012, 43, 465–473. [Google Scholar] [CrossRef]
- Ghasemi, A.; Enayatzare, M. Optimal energy management of a renewable-based isolated microgrid with pumped-storage unit and demand response. Renew. Energy 2018, 123, 460–474. [Google Scholar] [CrossRef]
- Kim, H.; Bae, J.; Baek, S.; Nam, D.; Cho, H.; Chang, H. Comparative analysis between the government micro-grid plan and computer simulation results based on real data: The practical case for a South Korean Island. Sustainability 2017, 9, 197. [Google Scholar] [CrossRef]
- Yousefi, H.; Ghodusinejad, M.H. Feasibility study of a hybrid energy system for emergency off-grid operating conditions. Majlesi J. Electr. Eng. 2017, 11, 7–14. [Google Scholar]
- Sardou, I.G.; Zare, M.; Farsani, E.A. Robust energy management of a microgrid with photovoltaic inverters in VAR compensation mode. Int. J. Electr. Power Energy Syst. 2018, 98, 118–132. [Google Scholar] [CrossRef]
- Zhang, Y.; Gatsis, N.; Giannakis, G.B. Robust Energy Management for Microgrids With High-Penetration Renewables. IEEE Trans. Sustain. Energy 2013, 4, 944–953. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Member, S.; Roh, J. Stochastic Energy Scheduling in Microgrids with Intermittent Renewable Energy Resources Stochastic Energy Scheduling in Microgrids With Intermittent Renewable Energy Resources. IEEE Trans. Smart Grid 2013, 5, 1876–1883. [Google Scholar] [CrossRef]
- Bruno, S.; Dellino, G.; La Scala, M.; Meloni, C. A Microforecasting Module for Energy Management in Residential and Tertiary Buildings. Energies 2019, 12, 1006. [Google Scholar] [CrossRef]
- Singh, S.; Singh, M.; Kaushik, S.C. Optimal power scheduling of renewable energy systems in microgrids using distributed energy storage system. IET Renew. Power Gener. 2016, 10, 1328–1339. [Google Scholar] [CrossRef]
- Lan, Y.; Guan, X.; Wu, J. Rollout strategies for real-time multi-energy scheduling in microgrid with storage system. IET Gener. Trans. Distrib. 2016, 10, 688–696. [Google Scholar] [CrossRef]
- Askarzadeh, A. A Memory-based Genetic Algorithm for Optimization of Power Generation in a Microgrid. IEEE Trans Sustain. Energy 2018, 9, 1081–1089. [Google Scholar] [CrossRef]
- Chen, C.; Lee, T.; Jan, R.; Lu, C. A novel direct search approach for combined heat and power dispatch. Int. J. Electr. Power Energy Syst. 2012, 43, 766–773. [Google Scholar] [CrossRef]
- Blake, S.T.; O’Sullivan, D.T.J. Optimization of Distributed Energy Resources in an Industrial Microgrid. Procedia CIRP 2018, 67, 104–109. [Google Scholar] [CrossRef]
- Silvente, J.; Papageorgiou, L.G. An MILP formulation for the optimal management of microgrids with task interruptions. Appl. Energy 2017, 206, 1131–1146. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H. Most Valuable Player Algorithm: A novel optimization algorithm inspired from sport. Oper. Res. 2017, 1–57. [Google Scholar] [CrossRef]
- Alatas, B. Sports inspired computational intelligence algorithms for global optimization. Artif. Intell. Rev. 2017, 1–49. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.; Orlandi, A.; Al-Qdah, M.; de Paulis, F. Most Valuable Player Algorithm for Circular Antenna Arrays Optimization to Maximum Sidelobe Levels Reduction. IEEE Trans. Electromagn. Compat. 2018, 60, 1655–1661. [Google Scholar] [CrossRef]
- Khodr, H.M.; Olsina, F.G.; De Oliveira-De Jesus, P.M.; Yusta, J.M. Maximum savings approach for location and sizing of capacitors in distribution systems. Electr. Power Syst. Res. 2008, 78, 1192–1203. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hour | Load (kW) | Electricity Price ($/kWh) |
|---|---|---|
| 1 | 1471 | 0.043 |
| 2 | 1325 | 0.035 |
| 3 | 1263 | 0.026 |
| 4 | 1229 | 0.022 |
| 5 | 1229 | 0.022 |
| 6 | 1321 | 0.038 |
| 7 | 1509 | 0.043 |
| 8 | 1663 | 0.07 |
| 9 | 1657 | 0.28 |
| 10 | 1643 | 0.744 |
| 11 | 1643 | 0.744 |
| 12 | 1652 | 0.744 |
| 13 | 1666 | 0.28 |
| 14 | 1639 | 0.744 |
| 15 | 1642 | 0.372 |
| 16 | 1640 | 0.363 |
| 17 | 1676 | 0.112 |
| 18 | 1920 | 0.077 |
| 19 | 2214 | 0.065 |
| 20 | 2382 | 0.079 |
| 21 | 2382 | 0.235 |
| 22 | 2327 | 0.1 |
| 23 | 2174 | 0.056 |
| 24 | 1903 | 0.048 |
| Plant | WP1 | WP2 | WP3 | PV1 | PV2 | CHP |
|---|---|---|---|---|---|---|
| α | 0.0027 | 0.0028 | 0.0026 | 0.0055 | 0.0055 | 0.0083 |
| β | 17.83 | 17.54 | 17.23 | 29.3 | 29.58 | 75.73 |
| γ | 4.46 | 4.45 | 4.44 | 4.45 | 4.46 | 5.21 |
| Hour | Power (kW) | Cost ($) | Total Cost ($) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WP1 | WP2 | WP3 | PV1 | PV2 | CHP | WP1 | WP2 | WP3 | PV1 | PV2 | CHP | ||
| 1 | 351 | 690 | 430 | 0 | 0 | 0 | 10.719 | 16.554 | 11.849 | 0 | 0 | 0 | 39.122 |
| 2 | 615 | 710 | 0 | 0 | 0 | 0 | 15.426 | 16.905 | 0 | 0 | 0 | 0 | 32.331 |
| 3 | 563 | 700 | 0 | 0 | 0 | 0 | 14.499 | 16.729 | 0 | 0 | 0 | 0 | 31.229 |
| 4 | 529 | 700 | 0 | 0 | 0 | 0 | 13.893 | 16.729 | 0 | 0 | 0 | 0 | 30.622 |
| 5 | 649 | 580 | 0 | 0 | 0 | 0 | 16.033 | 14.624 | 0 | 0 | 0 | 0 | 30.657 |
| 6 | 471 | 680 | 170 | 0 | 0 | 0 | 12.859 | 16.378 | 7.369 | 0 | 0 | 0 | 36.606 |
| 7 | 478 | 680 | 351 | 0 | 0 | 0 | 12.983 | 16.378 | 10.488 | 0 | 0 | 0 | 39.850 |
| 8 | 428 | 700 | 535 | 0 | 0 | 0 | 12.092 | 16.729 | 13.659 | 0 | 0 | 0 | 42.480 |
| 9 | 422 | 735 | 500 | 0 | 0 | 0 | 11.985 | 17.343 | 13.056 | 0 | 0 | 0 | 42.384 |
| 10 | 383 | 750 | 510 | 0 | 0 | 0 | 11.289 | 17.607 | 13.228 | 0 | 0 | 0 | 42.124 |
| 11 | 440 | 690 | 513 | 0 | 0 | 0 | 12.306 | 16.554 | 13.280 | 0 | 0 | 0 | 42.139 |
| 12 | 615 | 667 | 370 | 0 | 0 | 0 | 15.426 | 16.150 | 10.815 | 0 | 0 | 0 | 42.392 |
| 13 | 649 | 642 | 375 | 0 | 0 | 0 | 16.033 | 15.712 | 10.902 | 0 | 0 | 0 | 42.646 |
| 14 | 682 | 562 | 200 | 147 | 48 | 0 | 16.621 | 14.308 | 7.886 | 8.757 | 5.880 | 0 | 53.453 |
| 15 | 702 | 655 | 0 | 135 | 150 | 0 | 16.978 | 15.940 | 0 | 8.406 | 8.897 | 0 | 50.221 |
| 16 | 715 | 656 | 24.950 | 122 | 122.050 | 0 | 17.210 | 15.957 | 4.870 | 8.025 | 8.070 | 0 | 54.132 |
| 17 | 697 | 661 | 140 | 97 | 81 | 0 | 16.889 | 16.045 | 6.852 | 7.292 | 6.856 | 0 | 53.934 |
| 18 | 713 | 666 | 385 | 0 | 0 | 156 | 17.174 | 16.133 | 11.074 | 0 | 0 | 17.024 | 61.405 |
| 19 | 725 | 660 | 620 | 0 | 0 | 209 | 17.388 | 16.028 | 15.124 | 0 | 0 | 21.038 | 69.577 |
| 20 | 650 | 672 | 660 | 0 | 0 | 400 | 16.051 | 16.238 | 15.813 | 0 | 0 | 35.503 | 83.605 |
| 21 | 678 | 670 | 710 | 0 | 0 | 324 | 16.550 | 16.203 | 16.675 | 0 | 0 | 29.747 | 79.175 |
| 22 | 682 | 665 | 750 | 0 | 0 | 230 | 16.621 | 16.115 | 17.364 | 0 | 0 | 22.628 | 72.729 |
| 23 | 691 | 645 | 700 | 0 | 0 | 138 | 16.782 | 15.764 | 16.502 | 0 | 0 | 15.661 | 64.709 |
| 24 | 504 | 680 | 719 | 0 | 0 | 0 | 13.447 | 16.378 | 16.830 | 0 | 0 | 0 | 46.655 |
| EMVPA | MVPA | PSO | GA | BH | ABC | EM | |
|---|---|---|---|---|---|---|---|
| 1 | 39.122 | 39.172 | 39.122 | 46.999 | 44.557 | 39.241 | 47.422 |
| 2 | 32.331 | 36.590 | 32.331 | 42.318 | 46.246 | 36.588 | 41.890 |
| 3 | 31.229 | 35.653 | 31.278 | 42.729 | 49.520 | 36.566 | 43.255 |
| 4 | 30.622 | 30.645 | 30.622 | 41.653 | 42 | 35.042 | 41.267 |
| 5 | 30.657 | 30.663 | 30.657 | 50.974 | 45.034 | 35.096 | 40.695 |
| 6 | 36.606 | 45.128 | 36.613 | 46.338 | 45.977 | 43.162 | 42.595 |
| 7 | 39.850 | 39.938 | 39.953 | 58.745 | 51.906 | 44.410 | 50.187 |
| 8 | 42.480 | 55.093 | 47.158 | 58.655 | 60.901 | 47.079 | 57.563 |
| 9 | 42.384 | 53.346 | 47.349 | 59.139 | 58.794 | 52.454 | 58.157 |
| 10 | 42.124 | 52.650 | 47.188 | 59.429 | 59.710 | 46.973 | 58.546 |
| 11 | 42.139 | 55.690 | 46.647 | 58.287 | 65.156 | 48.325 | 59.173 |
| 12 | 42.392 | 53.266 | 48.685 | 60.439 | 59.135 | 53.752 | 59.903 |
| 13 | 42.646 | 47.844 | 47.279 | 57.679 | 61.281 | 53.768 | 57.399 |
| 14 | 53.453 | 63.523 | 53.453 | 63.713 | 68.693 | 65.085 | 92.087 |
| 15 | 50.221 | 65.096 | 53.757 | 68.912 | 64.259 | 54.586 | 59.931 |
| 16 | 54.132 | 65.927 | 54.132 | 66.193 | 68.696 | 59.799 | 59.456 |
| 17 | 53.934 | 70.984 | 59.726 | 66.129 | 81.586 | 62.367 | 78.585 |
| 18 | 61.405 | 73.136 | 68.308 | 91.969 | 82.236 | 64.055 | 91.664 |
| 19 | 69.577 | 81.472 | 69.578 | 97.152 | 97.700 | 77.199 | 98.356 |
| 20 | 83.605 | 84.283 | 83.605 | 88.555 | 97.660 | 84.494 | 104.155 |
| 21 | 79.175 | 79.272 | 79.175 | 92.646 | 92.320 | 79.412 | 104.322 |
| 22 | 72.729 | 74.843 | 72.729 | 79.393 | 80.878 | 76.817 | 94.007 |
| 23 | 64.709 | 68.251 | 64.709 | 91.059 | 77.448 | 66.764 | 82.545 |
| 24 | 46.655 | 46.694 | 46.655 | 66.587 | 53.742 | 60.560 | 54.157 |
| Total cost ($) | 1184.177 | 1349.159 | 1230.709 | 1555.692 | 1555.435 | 1323.594 | 1577.317 |
| Hour | Power (kW) | Cost ($) | Total Cost ($) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WP1 | WP2 | WP3 | PV1 | PV2 | Grid | WP1 | WP2 | WP3 | PV1 | PV2 | Grid | ||
| 1 | 498.100 | 690 | 430 | 0 | 0 | 0 | 13.342 | 16.554 | 11.849 | 0 | 0 | 0 | 41.745 |
| 2 | 302.500 | 710 | 445 | 0 | 0 | 0 | 9.854 | 16.905 | 12.108 | 0 | 0 | 0 | 38.866 |
| 3 | 689.300 | 700 | 0 | 0 | 0 | 0 | 16.752 | 16.729 | 0 | 0 | 0 | 0 | 33.481 |
| 4 | 651.900 | 700 | 0 | 0 | 0 | 0 | 16.085 | 16.729 | 0 | 0 | 0 | 0 | 32.814 |
| 5 | 670 | 580 | 21 | 0 | 0 | 80.900 | 16.407 | 14.624 | 4.802 | 0 | 0 | 1.554 | 35.833 |
| 6 | 560 | 680 | 170 | 0 | 0 | 43.100 | 14.446 | 16.378 | 7.369 | 0 | 0 | 1.412 | 38.193 |
| 7 | 628.900 | 680 | 351 | 0 | 0 | 0 | 15.674 | 16.378 | 10.488 | 0 | 0 | 0 | 42.541 |
| 8 | 594.300 | 700 | 535 | 0 | 0 | 0 | 15.057 | 16.729 | 13.659 | 0 | 0 | 0 | 45.445 |
| 9 | 587.700 | 735 | 500 | 0 | 0 | 0 | 14.940 | 17.343 | 13.056 | 0 | 0 | 0 | 45.339 |
| 10 | 547.300 | 750 | 510 | 0 | 0 | 0 | 14.219 | 17.607 | 13.228 | 0 | 0 | 0 | 45.054 |
| 11 | 604.300 | 690 | 513 | 0 | 0 | 0 | 15.236 | 16.554 | 13.280 | 0 | 0 | 0 | 45.069 |
| 12 | 720 | 667 | 370 | 60.200 | 0 | 0 | 17.299 | 16.150 | 10.815 | 6.214 | 0 | 0 | 50.479 |
| 13 | 710 | 642 | 375 | 105.600 | 0 | 0 | 17.121 | 15.712 | 10.902 | 7.544 | 0 | 0 | 51.278 |
| 14 | 682 | 562 | 200 | 147 | 166 | 45.900 | 16.621 | 14.308 | 7.886 | 8.757 | 9.370 | 29.668 | 56.943 |
| 15 | 702 | 655 | 75 | 135 | 155 | 84.200 | 16.978 | 15.940 | 5.732 | 8.406 | 9.045 | 27.212 | 56.101 |
| 16 | 715 | 656 | 25 | 122 | 135 | 151 | 17.210 | 15.957 | 4.871 | 8.025 | 8.453 | 47.606 | 54.516 |
| 17 | 697 | 661 | 140 | 97 | 110 | 138.600 | 16.889 | 16.045 | 6.852 | 7.292 | 7.714 | 13.469 | 54.792 |
| 18 | 713 | 666 | 385 | 62 | 86 | 200 | 17.174 | 16.133 | 11.074 | 6.267 | 7.004 | 13.334 | 57.652 |
| 19 | 725 | 660 | 620 | 20 | 50 | 360.400 | 17.388 | 16.028 | 15.124 | 5.036 | 5.939 | 20.363 | 59.514 |
| 20 | 650 | 672 | 660 | 0 | 0 | 638.200 | 16.051 | 16.238 | 15.813 | 0 | 0 | 43.991 | 48.102 |
| 21 | 678 | 670 | 710 | 0 | 0 | 562.200 | 16.550 | 16.203 | 16.675 | 0 | 0 | 114.987 | 49.428 |
| 22 | 682 | 665 | 750 | 0 | 0 | 462.700 | 16.621 | 16.115 | 17.364 | 0 | 0 | 40.260 | 50.101 |
| 23 | 691 | 645 | 700 | 0 | 0 | 355.400 | 16.782 | 15.764 | 16.502 | 0 | 0 | 17.269 | 49.049 |
| 24 | 694.300 | 680 | 719 | 0 | 0 | 0 | 16.841 | 16.378 | 16.830 | 0 | 0 | 0 | 50.049 |
| EMVPA | MVPA | PSO | GA | BH | ABC | EM | |
|---|---|---|---|---|---|---|---|
| 1 | 41.745 | 41.745 | 41.745 | 41.754 | 41.764 | 41.745 | 41.748 |
| 2 | 38.866 | 38.867 | 38.866 | 38.872 | 38.912 | 38.866 | 38.888 |
| 3 | 33.481 | 33.481 | 33.481 | 37.806 | 37.819 | 33.486 | 37.840 |
| 4 | 32.814 | 32.814 | 32.814 | 32.827 | 37.241 | 32.834 | 37.240 |
| 5 | 35.833 | 35.833 | 35.833 | 35.833 | 35.781 | 35.833 | 35.833 |
| 6 | 38.193 | 38.193 | 38.193 | 38.193 | 38.105 | 38.193 | 38.193 |
| 7 | 42.541 | 42.541 | 42.541 | 47.021 | 47.038 | 42.554 | 47.098 |
| 8 | 45.445 | 45.445 | 45.445 | 54.414 | 54.656 | 50.026 | 54.556 |
| 9 | 45.339 | 45.339 | 45.339 | 54.746 | 54.808 | 50.601 | 55.134 |
| 10 | 45.054 | 49.869 | 45.054 | 54.695 | 54.656 | 50.797 | 55.212 |
| 11 | 45.069 | 45.088 | 45.069 | 54.735 | 54.918 | 50.781 | 54.744 |
| 12 | 50.479 | 50.484 | 50.479 | 55.396 | 56.027 | 55.402 | 55.082 |
| 13 | 51.278 | 51.735 | 51.278 | 55.893 | 56.615 | 55.950 | 55.756 |
| 14 | 56.943 | 56.943 | 56.943 | 56.931 | 56.233 | 56.943 | 56.943 |
| 15 | 56.101 | 56.101 | 56.101 | 56.093 | 55.409 | 56.101 | 56.101 |
| 16 | 54.516 | 54.516 | 54.516 | 54.509 | 53.884 | 54.516 | 54.516 |
| 17 | 54.792 | 54.792 | 54.792 | 54.786 | 54.389 | 54.792 | 54.792 |
| 18 | 57.652 | 57.652 | 57.652 | 57.644 | 56.778 | 57.652 | 57.652 |
| 19 | 59.514 | 59.514 | 59.514 | 59.514 | 58.866 | 59.514 | 59.514 |
| 20 | 48.102 | 48.102 | 48.102 | 48.102 | 47.878 | 48.102 | 48.102 |
| 21 | 49.428 | 49.428 | 49.428 | 49.428 | 49.201 | 49.428 | 49.428 |
| 22 | 50.101 | 50.101 | 50.101 | 50.101 | 50.021 | 50.101 | 50.101 |
| 23 | 49.049 | 49.049 | 49.049 | 49.049 | 48.865 | 49.049 | 49.049 |
| 24 | 50.049 | 50.049 | 50.049 | 50.049 | 49.839 | 50.049 | 50.050 |
| Total cost ($) | 1132.384 | 1137.679 | 1132.384 | 1188.392 | 1189.702 | 1163.316 | 1193.572 |
| Hour | Power (kW) | Cost ($) | Total Cost ($) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WP1 | WP2 | WP3 | PV1 | PV2 | Battery | Grid | WP1 | WP2 | WP3 | PV1 | PV2 | Grid | ||
| 1 | 665.0 | 690.0 | 430.0 | 0.0 | 0.0 | 0.0 | 0.0 | 16.318 | 16.554 | 11.849 | 0 | 0 | 0 | 44.721 |
| 2 | 435.6 | 710.0 | 445.0 | 0.0 | 0.0 | 166.9 | 0.0 | 12.227 | 16.905 | 12.108 | 0 | 0 | 0 | 41.240 |
| 3 | 689.3 | 700.0 | 0.0 | 0.0 | 0.0 | 300.0 | 0.0 | 16.752 | 16.729 | 0 | 0 | 0 | 0 | 33.481 |
| 4 | 651.9 | 700.0 | 0.0 | 0.0 | 0.0 | 300.0 | 0.0 | 16.085 | 16.729 | 0 | 0 | 0 | 0 | 32.814 |
| 5 | 670.0 | 580.0 | 21.0 | 0.0 | 0.0 | 300.0 | 0.0 | 16.407 | 14.624 | 4.802 | 0 | 0 | 0 | 35.833 |
| 6 | 560.0 | 680.0 | 170.0 | 0.0 | 0.0 | 219.1 | 0.0 | 14.446 | 16.378 | 7.369 | 0 | 0 | 0 | 38.193 |
| 7 | 672.0 | 680.0 | 351.0 | 0.0 | 16.0 | 176.0 | 0.0 | 16.443 | 16.378 | 10.488 | 0 | 4.933 | 0 | 48.243 |
| 8 | 659.2 | 700.0 | 535.0 | 0.0 | 0.0 | 235.1 | 0.0 | 16.215 | 16.729 | 13.659 | 0 | 0 | 0 | 46.603 |
| 9 | 587.7 | 735.0 | 500.0 | 0.0 | 0.0 | 300.0 | 0.0 | 14.940 | 17.343 | 13.056 | 0 | 0 | 0 | 45.339 |
| 10 | 547.3 | 750.0 | 510.0 | 0.0 | 0.0 | 300.0 | 0.0 | 14.219 | 17.607 | 13.228 | 0 | 0 | 0 | 45.054 |
| 11 | 604.3 | 690.0 | 513.0 | 0.0 | 0.0 | 300.0 | 0.0 | 15.236 | 16.554 | 13.280 | 0 | 0 | 0 | 45.069 |
| 12 | 720.0 | 667.0 | 370.0 | 60.2 | 0.0 | 300.0 | 0.0 | 17.299 | 16.150 | 10.815 | 6.214 | 0 | 0 | 50.479 |
| 13 | 710.0 | 642.0 | 375.0 | 105.6 | 0.0 | 300.0 | 0.0 | 17.121 | 15.712 | 10.902 | 7.544 | 0 | 0 | 51.278 |
| 14 | 682.0 | 562.0 | 200.0 | 147.0 | 166.0 | 300.0 | 0.0 | 16.621 | 14.308 | 7.886 | 8.757 | 9.370 | 0 | 56.943 |
| 15 | 702.0 | 655.0 | 75.0 | 135.0 | 155.0 | 254.1 | 0.0 | 16.978 | 15.940 | 5.732 | 8.406 | 9.045 | 0 | 56.101 |
| 16 | 715.0 | 656.0 | 25.0 | 122.0 | 135.0 | 169.9 | 0.0 | 17.210 | 15.957 | 4.871 | 8.025 | 8.453 | 0 | 54.516 |
| 17 | 697.0 | 661.0 | 140.0 | 97.0 | 110.0 | 18.9 | 119.7 | 16.889 | 16.045 | 6.852 | 7.292 | 7.714 | 11.632 | 54.792 |
| 18 | 713.0 | 666.0 | 385.0 | 62.0 | 86.0 | 0.0 | 200.0 | 17.174 | 16.133 | 11.074 | 6.267 | 7.004 | 13.334 | 57.652 |
| 19 | 725.0 | 660.0 | 620.0 | 20.0 | 50.0 | 0.0 | 360.4 | 17.388 | 16.028 | 15.124 | 5.036 | 5.939 | 20.363 | 59.514 |
| 20 | 650.0 | 672.0 | 660.0 | 0.0 | 0.0 | 0.0 | 638.2 | 16.051 | 16.238 | 15.813 | 0 | 0 | 43.991 | 48.102 |
| 21 | 678.0 | 670.0 | 710.0 | 0.0 | 0.0 | 0.0 | 562.2 | 16.550 | 16.203 | 16.675 | 0 | 0 | 114.987 | 49.428 |
| 22 | 682.0 | 665.0 | 750.0 | 0.0 | 0.0 | 0.0 | 462.7 | 16.621 | 16.115 | 17.364 | 0 | 0 | 40.260 | 50.101 |
| 23 | 691.0 | 645.0 | 700.0 | 0.0 | 0.0 | 0.0 | 355.4 | 16.782 | 15.764 | 16.502 | 0 | 0 | 17.269 | 49.049 |
| 24 | 700.0 | 680.0 | 719.0 | 0.0 | 0.0 | 0.0 | 0.0 | 16.942 | 16.378 | 16.830 | 0 | 0 | 0 | 50.151 |
| EMVPA | MVPA | PSO | GA | BH | ABC | EM | |
|---|---|---|---|---|---|---|---|
| 1 | 44.721 | 44.721 | 44.721 | 44.721 | 44.594 | 44.721 | 44.721 |
| 2 | 41.240 | 41.240 | 41.240 | 41.350 | 41.412 | 41.312 | 41.296 |
| 3 | 33.481 | 33.482 | 33.481 | 37.842 | 37.829 | 37.824 | 37.921 |
| 4 | 32.814 | 32.814 | 32.814 | 37.258 | 37.238 | 32.824 | 37.257 |
| 5 | 35.833 | 35.833 | 35.833 | 35.833 | 35.757 | 35.833 | 35.833 |
| 6 | 38.193 | 38.193 | 38.193 | 38.193 | 38.059 | 38.193 | 38.193 |
| 7 | 48.243 | 48.243 | 48.243 | 48.242 | 47.849 | 48.243 | 48.243 |
| 8 | 46.603 | 46.603 | 46.603 | 55.931 | 56.656 | 51.129 | 55.627 |
| 9 | 45.339 | 45.339 | 45.339 | 54.533 | 54.662 | 50.313 | 55.305 |
| 10 | 45.054 | 49.737 | 45.054 | 55.163 | 54.434 | 45.081 | 55.116 |
| 11 | 45.069 | 45.133 | 45.069 | 54.810 | 54.999 | 50.330 | 55.587 |
| 12 | 50.479 | 50.561 | 50.479 | 56.093 | 56.304 | 51.404 | 55.815 |
| 13 | 51.278 | 55.767 | 51.278 | 56.621 | 56.649 | 52.049 | 56.061 |
| 14 | 56.943 | 56.943 | 56.943 | 56.938 | 56.072 | 56.943 | 56.943 |
| 15 | 56.101 | 56.101 | 56.101 | 56.092 | 55.302 | 56.101 | 56.101 |
| 16 | 54.516 | 54.516 | 54.516 | 54.509 | 53.931 | 54.516 | 54.516 |
| 17 | 54.792 | 54.792 | 54.792 | 54.786 | 54.389 | 54.792 | 54.792 |
| 18 | 57.652 | 57.652 | 57.652 | 57.644 | 56.778 | 57.652 | 57.652 |
| 19 | 59.514 | 59.514 | 59.514 | 59.514 | 58.866 | 59.514 | 59.514 |
| 20 | 48.102 | 48.102 | 48.102 | 48.102 | 47.878 | 48.102 | 48.102 |
| 21 | 49.428 | 49.428 | 49.428 | 49.428 | 49.201 | 49.428 | 49.428 |
| 22 | 50.101 | 50.101 | 50.101 | 50.101 | 50.021 | 50.101 | 50.101 |
| 23 | 49.049 | 49.049 | 49.049 | 49.049 | 48.865 | 49.049 | 49.049 |
| 24 | 50.150 | 50.151 | 50.151 | 50.151 | 49.839 | 50.151 | 50.151 |
| Total cost ($) | 1144.694 | 1154.013 | 1144.695 | 1202.903 | 1197.586 | 1165.605 | 1203.325 |
| Hour | Load (kW) | Electricity Price ($/kW h) |
|---|---|---|
| 1 | 3482 | 0.043 |
| 2 | 2946 | 0.035 |
| 3 | 2761 | 0.026 |
| 4 | 2558 | 0.022 |
| 5 | 2541 | 0.022 |
| 6 | 2616 | 0.038 |
| 7 | 3635 | 0.043 |
| 8 | 4339 | 0.07 |
| 9 | 4748 | 0.28 |
| 10 | 5100 | 0.744 |
| 11 | 5231 | 0.744 |
| 12 | 5306 | 0.744 |
| 13 | 5454 | 0.28 |
| 14 | 5215 | 0.744 |
| 15 | 5363 | 0.372 |
| 16 | 5383 | 0.363 |
| 17 | 5198 | 0.112 |
| 18 | 5051 | 0.077 |
| 19 | 4496 | 0.065 |
| 20 | 5275 | 0.079 |
| 21 | 5479 | 0.235 |
| 22 | 5536 | 0.1 |
| 23 | 5370 | 0.056 |
| 24 | 4611 | 0.048 |
| Plant | WP1 | WP2 | WP3 | WP4 | WP5 | WP6 | PV1 | PV2 | PV3 | PV4 | PV5 | PV6 | PV7 | PV8 | CHP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| α | 0.0027 | 0.0028 | 0.0026 | 0.0028 | 0.0026 | 0.0026 | 0.0055 | 0.0055 | 0.0055 | 0.0055 | 0.0055 | 0.0055 | 0.0055 | 0.0055 | 0.0083 |
| β | 17.83 | 17.54 | 17.23 | 17.54 | 17.23 | 17.23 | 29.3 | 29.58 | 29.3 | 29.58 | 29.3 | 29.58 | 29.3 | 29.58 | 75.73 |
| γ | 4.46 | 4.45 | 4.44 | 4.45 | 4.44 | 4.44 | 4.45 | 4.46 | 4.45 | 4.46 | 4.45 | 4.46 | 4.45 | 4.46 | 5.21 |
| Hour | WP1 | WP2 | WP3 | WP4 | WP5 | WP6 | PV1 | PV2 | PV3 | PV4 | PV5 | PV6 | PV7 | PV8 | CHP | Battery | Grid |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 665 | 689.972 | 430 | 690 | 690 | 430 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 187.028 | 0 | 0 |
| 2 | 0 | 710 | 437.592 | 648.137 | 705.271 | 445 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 300 | 0 |
| 3 | 661 | 700 | 0 | 700 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 300 | 0 |
| 4 | 458 | 700 | 0 | 700 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 300 | 0 |
| 5 | 670 | 579.350 | 0 | 580 | 580 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 131.650 | 300 | 0 |
| 6 | 406.007 | 679.993 | 170 | 680 | 680 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 300 | 0 |
| 7 | 672 | 672.772 | 317 | 679.755 | 680 | 351 | 0 | 14.855 | 0 | 15.973 | 0 | 0 | 0 | 0 | 231.646 | 300 | 0 |
| 8 | 668 | 700 | 535 | 700 | 700 | 535 | 10 | 72 | 0 | 72 | 0 | 0 | 0 | 0 | 347 | 300 | 0 |
| 9 | 723 | 735 | 496.003 | 733.011 | 735 | 499.993 | 57.667 | 91.517 | 0 | 0 | 0 | 16.097 | 0 | 91.964 | 568.749 | 300 | 0 |
| 10 | 715 | 750 | 506.635 | 750 | 749.441 | 510 | 99.480 | 117.569 | 0 | 118 | 41.036 | 110.046 | 19.780 | 117.904 | 495.109 | 300 | 0 |
| 11 | 674.770 | 689.972 | 513 | 690 | 689.985 | 513 | 123 | 142 | 123 | 142 | 123 | 0 | 100.213 | 142 | 565.060 | 300 | 0 |
| 12 | 720 | 667 | 370 | 667 | 667 | 370 | 140.897 | 144.450 | 139.038 | 156 | 140.996 | 156 | 141 | 0 | 826.619 | 300 | 0 |
| 13 | 710 | 642 | 375 | 642 | 642 | 375 | 149 | 166 | 149 | 166 | 149 | 166 | 149 | 160.826 | 813.174 | 300 | 0 |
| 14 | 682 | 562 | 200 | 562 | 562 | 200 | 147 | 166 | 147 | 166 | 147 | 166 | 147 | 166 | 1000 | 300 | 0 |
| 15 | 702 | 655 | 75 | 655 | 655 | 75 | 135 | 155 | 135 | 155 | 135 | 155 | 135 | 155 | 1000 | 105 | 281 |
| 16 | 715 | 656 | 25 | 656 | 656 | 25 | 122 | 135 | 122 | 135 | 122 | 135 | 122 | 135 | 1000 | 0 | 622 |
| 17 | 697 | 661 | 140 | 661 | 661 | 140 | 97 | 110 | 97 | 110 | 97 | 110 | 97 | 110 | 1000 | 0 | 410 |
| 18 | 713 | 666 | 385 | 666 | 666 | 385 | 62 | 86 | 62 | 86 | 62 | 86 | 62 | 86 | 1000 | 0 | 0 |
| 19 | 554.010 | 660 | 620 | 660 | 660 | 619.991 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1000 | 22 | 0 |
| 20 | 650 | 672 | 660 | 672 | 672 | 660 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1000 | 300 | 0 |
| 21 | 678 | 670 | 710 | 670 | 670 | 710 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1000 | 11 | 360 |
| 22 | 682 | 665 | 750 | 665 | 665 | 750 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1000 | 0 | 359 |
| 23 | 691 | 645 | 700 | 645 | 645 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1000 | 0 | 344 |
| 24 | 700 | 680 | 719 | 680 | 680 | 719 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 733 | 0 | 0 |
| Hour | WP1 | WP2 | WP3 | WP4 | WP5 | WP6 | PV1 | PV2 | PV3 | PV4 | PV5 | PV6 | PV7 | PV8 | CHP | Grid | Total Cost ($) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 16.318 | 16.553 | 11.849 | 16.554 | 16.554 | 11.849 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 19.374 | 0 | 109.052 |
| 2 | 0 | 16.905 | 11.980 | 15.819 | 16.822 | 12.108 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 73.634 |
| 3 | 16.247 | 16.729 | 0 | 16.729 | 16.729 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 66.435 |
| 4 | 12.627 | 16.729 | 0 | 16.729 | 16.729 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 62.815 |
| 5 | 16.407 | 14.613 | 0 | 14.624 | 14.624 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 15.180 | 0 | 75.448 |
| 6 | 11.700 | 16.378 | 7.369 | 16.378 | 16.378 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 68.204 |
| 7 | 16.443 | 16.252 | 9.902 | 16.374 | 16.378 | 10.488 | 0 | 4.899 | 0 | 4.932 | 0 | 0 | 0 | 0 | 22.753 | 0 | 118.422 |
| 8 | 16.372 | 16.729 | 13.659 | 16.729 | 16.729 | 13.659 | 4.743 | 6.590 | 0 | 6.590 | 0 | 0 | 0 | 0 | 31.489 | 0 | 143.289 |
| 9 | 17.353 | 17.343 | 12.987 | 17.309 | 17.343 | 13.056 | 6.140 | 7.167 | 0 | 0 | 0 | 4.936 | 0 | 7.180 | 48.284 | 0 | 169.097 |
| 10 | 17.210 | 17.607 | 13.170 | 17.607 | 17.597 | 13.228 | 7.365 | 7.938 | 0 | 7.951 | 5.652 | 7.715 | 5.030 | 7.948 | 42.707 | 0 | 188.722 |
| 11 | 16.492 | 16.553 | 13.280 | 16.554 | 16.554 | 13.280 | 8.054 | 8.660 | 8.054 | 8.660 | 8.054 | 0 | 7.386 | 8.660 | 48.005 | 0 | 198.247 |
| 12 | 17.299 | 16.150 | 10.815 | 16.150 | 16.150 | 10.815 | 8.578 | 8.733 | 8.524 | 9.075 | 8.581 | 9.075 | 8.581 | 0 | 67.816 | 0 | 216.344 |
| 13 | 17.121 | 15.712 | 10.902 | 15.712 | 15.712 | 10.902 | 8.816 | 9.370 | 8.816 | 9.370 | 8.816 | 9.370 | 8.816 | 9.217 | 66.797 | 0 | 225.449 |
| 14 | 16.621 | 14.308 | 7.886 | 14.308 | 14.308 | 7.886 | 8.757 | 9.370 | 8.757 | 9.370 | 8.757 | 9.370 | 8.757 | 9.370 | 80.948 | 0 | 228.778 |
| 15 | 16.978 | 15.940 | 5.732 | 15.940 | 15.940 | 5.732 | 8.406 | 9.045 | 8.406 | 9.045 | 8.406 | 9.045 | 8.406 | 9.045 | 80.948 | 90.814 | 317.827 |
| 16 | 17.210 | 15.957 | 4.871 | 15.957 | 15.957 | 4.871 | 8.025 | 8.453 | 8.025 | 8.453 | 8.025 | 8.453 | 8.025 | 8.453 | 80.948 | 196.098 | 417.782 |
| 17 | 16.889 | 16.045 | 6.852 | 16.045 | 16.045 | 6.852 | 7.292 | 7.714 | 7.292 | 7.714 | 7.292 | 7.714 | 7.292 | 7.714 | 80.948 | 39.844 | 259.545 |
| 18 | 17.174 | 16.133 | 11.074 | 16.133 | 16.133 | 11.074 | 6.267 | 7.004 | 6.267 | 7.004 | 6.267 | 7.004 | 6.267 | 7.004 | 80.948 | 0 | 221.751 |
| 19 | 14.339 | 16.028 | 15.124 | 16.028 | 16.028 | 15.123 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80.948 | 0 | 173.617 |
| 20 | 16.051 | 16.238 | 15.813 | 16.238 | 16.238 | 15.813 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80.948 | 0 | 177.339 |
| 21 | 16.550 | 16.203 | 16.675 | 16.203 | 16.203 | 16.675 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80.948 | 73.631 | 253.087 |
| 22 | 16.621 | 16.115 | 17.364 | 16.115 | 16.115 | 17.364 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80.948 | 31.237 | 211.880 |
| 23 | 16.782 | 15.764 | 16.502 | 15.764 | 15.764 | 16.502 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 80.948 | 16.715 | 194.743 |
| 24 | 16.942 | 16.378 | 16.830 | 16.378 | 16.378 | 16.830 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 60.725 | 0 | 160.462 |
| EMVPA | MVPA | PSO | GA | BH | ABC | EM | |
|---|---|---|---|---|---|---|---|
| 1 | 109.052 | 131.097 | 109.051 | 149.420 | 140.238 | 119.882 | 146.214 |
| 2 | 73.634 | 88.327 | 73.632 | 104.006 | 93.852 | 88.178 | 87.882 |
| 3 | 66.435 | 75.267 | 75.082 | 104.293 | 99.423 | 86.126 | 108.663 |
| 4 | 62.815 | 81.638 | 71.697 | 101.301 | 93.807 | 83.835 | 97.278 |
| 5 | 75.448 | 109.561 | 87.637 | 105.112 | 106.625 | 83.099 | 112.875 |
| 6 | 68.204 | 100.136 | 68.226 | 96.122 | 93.333 | 72.623 | 88.867 |
| 7 | 118.422 | 128.738 | 126.987 | 158.330 | 154.699 | 124.681 | 165.397 |
| 8 | 143.289 | 174.430 | 151.824 | 189.479 | 190.573 | 158.646 | 195.657 |
| 9 | 169.097 | 179.052 | 173.734 | 210.983 | 203.663 | 174.360 | 206.838 |
| 10 | 188.722 | 204.723 | 186.305 | 209.471 | 216.408 | 181.923 | 217.271 |
| 11 | 198.247 | 208.734 | 197.381 | 222.841 | 221.767 | 194.220 | 222.691 |
| 12 | 216.344 | 220.478 | 219.896 | 229.937 | 220.997 | 213.539 | 226.406 |
| 13 | 225.449 | 228.701 | 229.613 | 234.735 | 220.379 | 225.563 | 234.122 |
| 14 | 228.778 | 228.778 | 228.778 | 225.685 | 210.226 | 228.778 | 228.778 |
| 15 | 227.013 | 227.013 | 227.013 | 224.785 | 213.111 | 227.013 | 227.013 |
| 16 | 221.684 | 221.684 | 221.684 | 219.751 | 206.573 | 221.684 | 221.684 |
| 17 | 219.701 | 219.701 | 219.701 | 217.352 | 206.913 | 219.701 | 219.701 |
| 18 | 221.751 | 221.751 | 221.751 | 219.166 | 208.851 | 221.751 | 221.751 |
| 19 | 173.617 | 187.769 | 175.060 | 209.117 | 208.643 | 187.023 | 208.273 |
| 20 | 177.339 | 177.339 | 177.339 | 177.125 | 171.369 | 177.339 | 177.339 |
| 21 | 179.457 | 179.457 | 179.457 | 179.331 | 173.082 | 179.457 | 179.457 |
| 22 | 180.644 | 180.644 | 180.644 | 180.422 | 173.329 | 180.644 | 180.644 |
| 23 | 178.028 | 178.028 | 178.028 | 177.809 | 169.839 | 178.028 | 178.028 |
| 24 | 160.462 | 160.502 | 160.462 | 169.719 | 174.178 | 161.139 | 164.167 |
| Total cost ($) | 3883.633 | 4113.548 | 3940.981 | 4316.291 | 4171.878 | 3989.233 | 4316.997 |
| Case | MVPA | PSO | GA | BH | ABC | EM |
|---|---|---|---|---|---|---|
| Case 1 | 12.229% | 3.781% | 23.881% | 23.868% | 10.533% | 24.925% |
| Case 2 | 0.465% | 0.000% | 4.713% | 4.818% | 2.659% | 5.126% |
| Case 3 | 0.808% | 0.000% | 4.839% | 4.417% | 1.794% | 4.872% |
| Case 4 | 5.589% | 1.455% | 10.024% | 6.909% | 2.647% | 10.039% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramli, M.A.M.; Bouchekara, H.R.E.H.; Alghamdi, A.S. Efficient Energy Management in a Microgrid with Intermittent Renewable Energy and Storage Sources. Sustainability 2019, 11, 3839. https://doi.org/10.3390/su11143839
Ramli MAM, Bouchekara HREH, Alghamdi AS. Efficient Energy Management in a Microgrid with Intermittent Renewable Energy and Storage Sources. Sustainability. 2019; 11(14):3839. https://doi.org/10.3390/su11143839
Chicago/Turabian StyleRamli, Makbul A.M., H.R.E.H. Bouchekara, and Abdulsalam S. Alghamdi. 2019. "Efficient Energy Management in a Microgrid with Intermittent Renewable Energy and Storage Sources" Sustainability 11, no. 14: 3839. https://doi.org/10.3390/su11143839
APA StyleRamli, M. A. M., Bouchekara, H. R. E. H., & Alghamdi, A. S. (2019). Efficient Energy Management in a Microgrid with Intermittent Renewable Energy and Storage Sources. Sustainability, 11(14), 3839. https://doi.org/10.3390/su11143839