Abstract
Collision avoidance between vehicles is a great challenge, especially in the context of mixed driving of connected and autonomous vehicles (CAVs) and human-driven vehicles (HVs). Advances in automation and connectivity technologies provide opportunities for CAVs to drive cooperatively. This paper proposes a proactive collision avoidance model, aiming to avoid collisions by controlling the speed and lane-changing behavior of CAVs. In the model, the subject vehicle first collects information about surrounding lanes and judges the traffic conditions; it then chooses to decelerate or change lanes to avoid collisions. The subject vehicle also searches for the optimal vehicle in the surrounding lanes for cooperation. The effectiveness of the proposed collision avoidance model is verified through the Python-SUMO platform. The experimental results show that the performance of the collision avoidance model is better than that of the cooperative adaptive cruise control (CACC) model in terms of average speed, lost time and the number of vehicle conflicts, proving the advantages of the proposed model in safety and efficiency.
1. Introduction
The emergence of connected and autonomous vehicles (CAVs) is reshaping the landscape of modern transportation by introducing the potential for cooperative, intelligent, and efficient traffic systems. By leveraging vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, CAVs can make coordinated decisions that enhance road safety, reduce congestion, and optimize traffic flow [1,2,3,4]. Consequently, considerable research has been devoted to optimizing CAV behavior in homogeneous environments, where all vehicles are automated. These efforts include the development of platooning control algorithms [5], trajectory planning techniques [6,7], and adaptive cruise and speed control systems, all of which aim to maximize system-level performance under idealized conditions.
Before full market penetration of CAVs is achieved, the mixed traffic of CAVs and human-driven vehicles (HVs) will exist for a long time. The challenges during the transition period are mainly related to the interaction between controllable CAVs and uncontrollable HVs, including the car following and lane changing management of the mixed traffic. For example, Zheng et al. [8] proposed an analytical lane management model for managing the mixed traffic flow on multi-lane roadways, and the model considered the car-following behaviors of HVs to follow CAVs.
To improve the efficiency and safety of mixed traffic flow, several researchers modeled the longitudinal and lateral controls of CAVs [9,10,11,12,13]. Papadoulis et al. [2] developed a decision-making CAV control algorithm. The algorithm enables a CAV to first exercise longitudinal control, then search for adjacent vehicles, identify nearby CAVs, and make lateral decisions in mixed traffic. However, their approach does not achieve dynamic cooperation with surrounding vehicles in mixed traffic. Khattak et al. [14] developed a CAV-based lane management application for the mixed autonomy operation of CAVs and HVs. In their work, the cooperative adaptive cruise control (CACC) models CAV following behavior and Wiedemann 99 describes HV following behavior. The CAV lane-change behavior is guided by the proposed system, which identifies and recommends spatially ideal locations for CAVs to merge into another lane.
In the context of emergency collision avoidance for CAVs, most studies focus on fully CAV scenarios, with limited attention to mixed traffic environments. Wang et al. [15] proposed a hybrid automaton and potential field-based velocity obstacle method for collision-free motion planning during CAV platoon merging and splitting. Muzahid et al. [16] reviewed various multi-vehicle cooperation and collision avoidance strategies for autonomous vehicles, focusing on planning methods, performance, and social impact. For the CAV collision avoidance under mixed traffic environments, Ma et al. [17] developed a connected bus platoon strategy to elude non-connected vehicles in the target lane for completing lane change, and Du et al. [18] proposed a cooperative crash avoidance framework for AVs in mixed traffic flows.
Overall, the existing literature related to CAV collision avoidance modeling in mixed traffic scenarios predominantly concentrates on longitudinal platooning, lane management protocols, and safety assessment [19], while often neglecting the complexity of heterogeneous interactions. To advance this field, there is a pressing need for models that enable proactive risk mitigation, offer a more granular understanding of collision scenarios, and facilitate coordinated decision-making with surrounding CAVs across both lateral and longitudinal dimensions. Furthermore, ensuring such models are characterized by low parameter dependency and ease of calibration is essential for enhancing their portability and scalability in real-world deployments.
To bridge these gaps, this study proposes a proactive collision avoidance model for CAVs in mixed traffic environments. The model dynamically coordinates speed control and lane-change decisions through real-time interactions with HVs and neighboring CAVs. By integrating safety distance calculations, cooperative lane-change protocols, and adaptive speed adjustments, the system aims to minimize collision risks while preserving traffic fluidity. The effectiveness of the proposed model is validated through microscopic simulations using the Python-SUMO (Python 3.9, SUMO1.20.0) platform, with performance benchmarks against conventional CACC strategies.
This research contributes to the development of collision avoidance systems tailored for the transitional era of mixed traffic flows, emphasizing both safety and efficiency gains. The main innovation of this study lies in the development of a rule-based proactive collision avoidance model for CAVs operating in mixed traffic environments. The model enables CAVs to proactively interact with both HVs and neighboring CAVs, achieving enhanced collision safety while improving overall traffic efficiency. Also, the proposed model is characterized by low reliance on parameter calibration and high portability, making it well suited for practical deployment across diverse traffic conditions and supporting adaptive CAV control during the transitional phase of traffic automation.
2. Methodology
2.1. Safety Distance
To realize the longitudinal and lateral collision avoidance system, a prerequisite is an accurate safety distance model, which is based on the braking process of a leading vehicle in this study.
As shown in Figure 1, a following vehicle (FV) follows a leading vehicle (LV), when the LV makes an emergency braking, the FV also brakes urgently. denotes the distance traveled by FV during the emergency braking process, denotes the distance traveled by LV, is the minimum distance from rear of the LV to front of the FV when they are stopped, and the value of is set as 4 m in this study. represents the safety distance between LV and FV. The calculation of is in Equation (1).
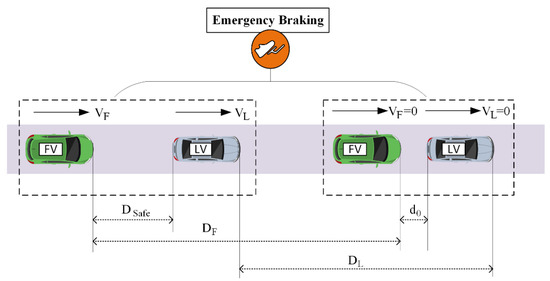
Figure 1.
Safety distance illustration.
We use to indicate the maximum braking deceleration of vehicles, to represent the FV’s initial speed, and to denote the LV’s initial speed. Therefore, , and the safety distance
2.2. Collision Avoidance Modeling of Speed
The collision avoidance system is assumed to collect the information of surrounding vehicles. When there is no vehicle in front within a certain distance, the subject vehicle will drive at speed . is the minimum value among the guide speed (), the subject vehicle’s maximum speed (), and the maximum speed limit on the road (). refers to the following speed of the subject vehicle assuming that a car 1000 m in front of the subject vehicle is driving at 0.9 times the maximum speed limit. is calculated by Equation (2).
If the vehicle in front of the subject vehicle is a CAV, the subject vehicle will follow the preceding vehicle at speed . The calculation of is shown in Equation (3).
where denotes the maximum speed that a vehicle can reach, is the maximum speed limit of a road section, means the following vehicle’s speed that can avoid emergency collisions, calculated by Equation (4). means the maximum deceleration rate of the subject vehicle, which is set to 4.5 here. represents the distance between the subject vehicle and its preceding vehicle, is the minimum stop distance.
If the vehicle in front of the subject vehicle is an HV, the next step is to check the HV’s deceleration. The threshold of the preceding HV’s deceleration is set as 2 in this paper, and when the preceding HV’s deceleration is greater than or equal to 2, there is a potential for abnormal conditions. Therefore, when the preceding HV’s deceleration is greater than or equal to 2, and at the same time, the distance between the subject vehicle and the preceding HV is greater than twice the safe distance, the subject vehicle will consider changing lanes to avoid collisions. When the preceding HV’s deceleration is greater than or equal to 2, and the distance between the subject vehicle and the preceding HV is between a safe distance and twice the safe distance, the subject vehicle will continue to follow the preceding vehicle at speed and detect the surrounding lanes to look for lane change opportunities. When the preceding HV’s deceleration is greater than or equal to 2, and the distance between the subject vehicle and the preceding HV is within a safe distance, there is no chance to change lanes, so the subject vehicle will directly decelerate to avoid collisions. When the preceding HV’s deceleration is less than 2, the subject vehicle will continue to follow the preceding vehicle at speed .
2.3. Collision Avoidance Modeling of Lane-Changing
When the subject vehicle is looking for lane-changing opportunities, based on the surrounding information, the lane-changing decision can be classified into four scenarios A, B, C, and D.
Scenario A: When there is a vehicle in the left/right lane that meets the condition of and ( is the vehicle length), the subject vehicle will change to this lane and priority to the left lane. As in Figure 2, indicates the longitudinal distance between the front bumper of the preceding vehicle in the target lane and the front bumper of the subject vehicle, is the longitudinal distance between the front bumper of the rear vehicle in the target lane and the front bumper of the subject vehicle, and denotes the safety distance.
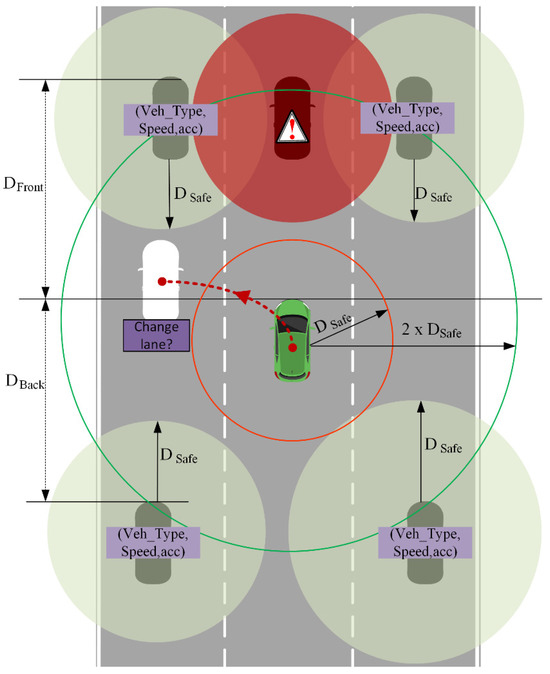
Figure 2.
Scenario A (with the left lane as an example).
Scenario B: When the road conditions do not meet scenario A, detect whether the CAV is present among the four vehicles in the surrounding lanes (left-front, left-rear, right-front, and right-rear cars). If the CAV does not exist, it belongs to scenario B, where the subject vehicle does not have enough space for collision avoidance, so it can only temporarily follow the preceding vehicle at speed and detect the surrounding vehicles in real time to seek lane change opportunities.
Scenario C: When the road conditions do not meet scenarios A or B, detect the longitudinal distances between each of the four vehicles in the surrounding lanes (left-front, left-rear, right-front, and right-rear cars) and the subject vehicle. If all of the four longitudinal distances are smaller than their corresponding safety distances, Scenario C is triggered, where the subject vehicle is unable to make lane changes and avoid collisions. In this case, the subject vehicle can only follow the preceding vehicle at speed while continuously detecting surrounding vehicles in real time to seek lane change opportunities.
Scenario D: When the road conditions do not meet scenarios A, B or C, it belongs to scenario D. First, detect the longitudinal distance between each of the four vehicles in the surrounding lanes (left-front, left-rear, right-front, and right-rear cars) and the subject vehicle. If there is a longitudinal distance larger than the safety distance (priority to longer longitudinal distance), then detect the type of the target vehicle. If the target vehicle is a CAV, controlling the CAV to accelerate/decelerate to give up the space so that the subject vehicle has enough space to change lanes and avoid collisions. If the target vehicle is an HV, the subject vehicle cannot make lane changes to avoid collisions. Instead, it can temporarily follow the preceding vehicle at speed and detect the surrounding vehicles in real time to seek lane change opportunities.
If the current surrounding information does not match any of the above scenarios, the subject vehicle will reduce speed to maintain the safety distance from the front HV and look for lane-changing opportunities in the next time step.
Figure 3 shows the flowchart of the proposed collision avoidance model. The collision avoidance model is activated when an HV initiates an emergency braking operation. The model is implemented by controlling the collision-involved CAVs. If the distance between the HV and its following CAV is more than double the safety distance, this CAV will be a collision-involved CAV. For non-collision-involved CAVs, this study models them using the CACC approach.
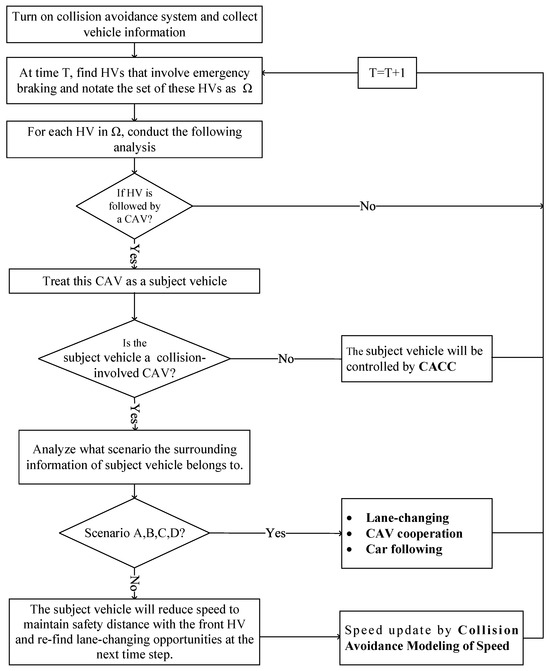
Figure 3.
Flowchart of the proposed collision avoidance model.
3. Experiments
In the experiment, Python-based secondary development of SUMO is employed to realize the proposed collision avoidance model and verify its effectiveness and feasibility.
3.1. Simulation Environment
3.1.1. Introduction to SUMO
SUMO, known as “Simulation of Urban Mobility”, was developed by the German Aerospace Center. It is a microscopic and open-source traffic simulation software, enabling microscopic control of traffic flow. SUMO has been applied in a number of projects within the German Aerospace Center since 2001. It embeds the Python interface, enabling comprehensive functions and diverse applications. One important tool of SUMO is TraCI (Traffic Control Interface), which is a Python API that provides users with the ability to interact with simulations to control vehicle parameters.
3.1.2. Wiedemann 99 Model
In the simulation, the typical psycho-physical Wiedemann 99 model is adopted to describe the driver behavior of HVs. In the Wiedemann 99 model, when a vehicle at high speed approaches a slower preceding vehicle and reaches its safety perception threshold, the vehicle will start to slow down. Due to variations in physical characteristics, HVs have different perception thresholds for safety distance, desired speed, and speed difference. When the subject vehicle drives in the car-following mode at speed , the following distance is calculated as , where the desired standstill distance between two HVs is set as 1.5 and the time headway 0.9 in this experiment. In addition, the longitudinal oscillation of HVs is expected to be 4, and the speed difference in the “following” state is between −0.35 and 0.35.
3.1.3. Cooperative Adaptive Cruise Control (CACC)
In this experiment, the CACC model developed by Milanés and Shladover [20] is adopted as the baseline, and compared with the proposed collision avoidance model. CACC has three control modes: speed control mode, gap control mode, and gap-closing control mode. CAVs in different traffic conditions select different control modes and driving strategies [21]. Here, two time-gap thresholds (i.e., , ) between a vehicle and its preceding vehicle are used to distinguish traffic conditions.
The speed control mode aims to eliminate deviations between vehicle speeds. A CAV in the speed control mode will gradually accelerate to a preset desired speed and maintain that speed as much as possible. The mode is usually triggered in low-volume traffic conditions when there are no preceding vehicles in the range covered by the sensors or when the time-gap is larger than . The acceleration in the speed control mode is shown in Equation (5).
Here, indicates the recommended acceleration for vehicle at time + 1, is the desired speed, denotes the speed of vehicle at time , and represents the control gain to determine the speed deviation rate of acceleration. The value of the control gain is generally between 0.3 and 0.4, and in this study.
Regarding the gap control mode, the vehicle speed at the next moment is dynamically adjusted according to the gap deviation between the subject vehicle and its preceding vehicle at the current moment. The gap control mode is activated when the gap and speed deviations (with respect to the preceding vehicle) are concurrently smaller than 0.2 and 0.1, respectively. The vehicle speed in the gap control mode is calculated by Equations (6)–(8).
Here, represents the speed of vehicle at time . is the gap deviation of vehicle at time , calculated by the position of vehicle at time () and the position of the preceding vehicle at time (). denotes the desired time gap of vehicles. is the derivative of in terms of time . The control parameters and reflect the weights of and in the formula of . The values of and are set as and .
When the time gap is less than , the gap closing control mode is triggered, which allows the CAV to make a lane-change response and complete a smooth driving trajectory. The gap closing control mode also employs Equation (6) to update CAV speed but replace and with parameters and . The optimal gains here are and . Moreover, if and , the equation can output a collision avoidance operation by reducing CAV speed when the gap deviation is negative.
3.1.4. Model Parameter Values and Simulation Settings
It is assumed that the maximum acceleration of all vehicles , and the maximum deceleration of all vehicles . CAV and HV each account for 50% of the vehicles in the traffic stream. The collision avoidance model and CACC model are used to simulate driving behavior of CAVs, and the Wiedemann 99 model is used to simulate the driving behavior of HVs. In simulation, CAVs are shown in green, while HVs are shown in red. The simulation duration is 3600 s on a two-kilometer three-lane freeway section, and the maximum speed limit is 60. The proposed collision avoidance model is implemented on Python-TraCI-SUMO simulation platform, where Python uses the TraCI interface to read and dynamically modify vehicle states in real time during the simulation.
In the simulation, nine accident vehicles are randomly placed on the road section 400 to 800 m from the starting point to simulate the accident behavior of HVs. The accident vehicles decelerate at the maximum deceleration rate when they arrive at the designated simulation time. The accident vehicle ID, accident start time, and accident end time are shown in Table 1.

Table 1.
Accident vehicle information.
A detector is set up on each of the three lanes to measure the number of vehicles entering the lane, the number of vehicles leaving the lane, the average speed, and the running time loss. Figure 4 depicts a collision avoidance scenario in a SUMO simulation, where the red car denotes an HV and the green car represents a CAV. When the HV in front of the collision-avoidance-involved CAV encounters an accident, the CAV will adjust its behavior based on the proposed collision avoidance model.
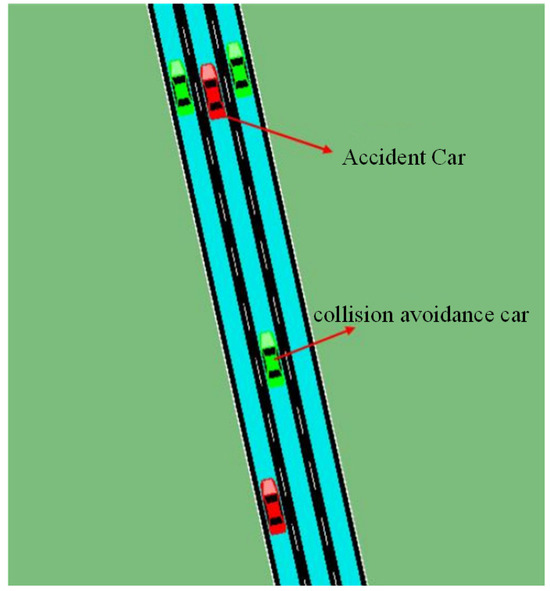
Figure 4.
A collision avoidance scenario in SUMO simulation.
4. Simulation Results and Discussion
4.1. Evaluation of Traffic Efficiency
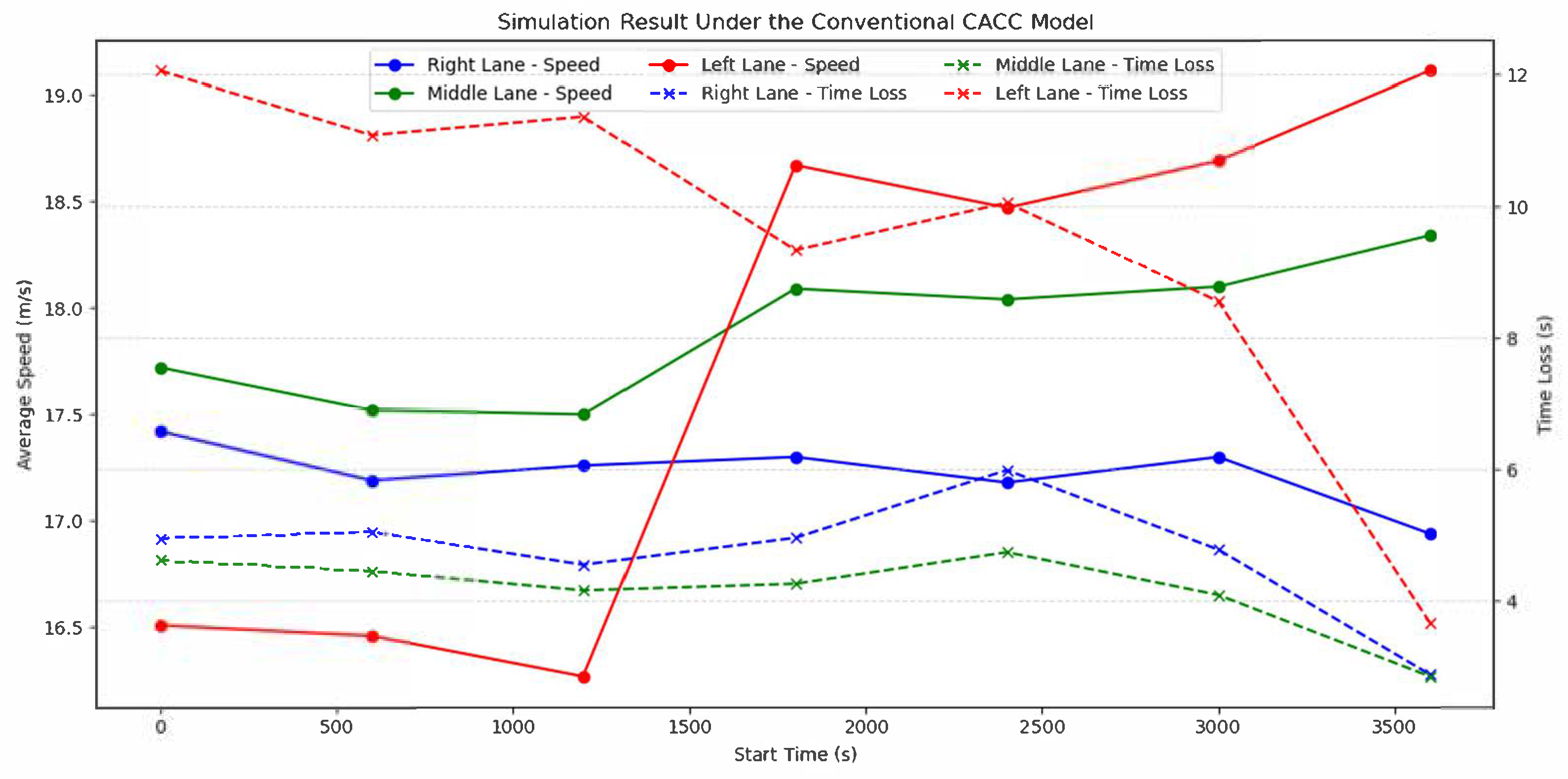
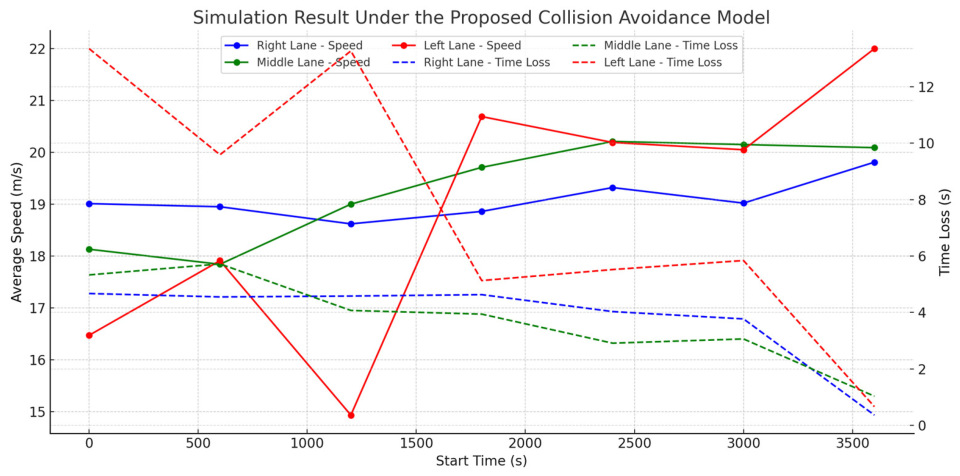
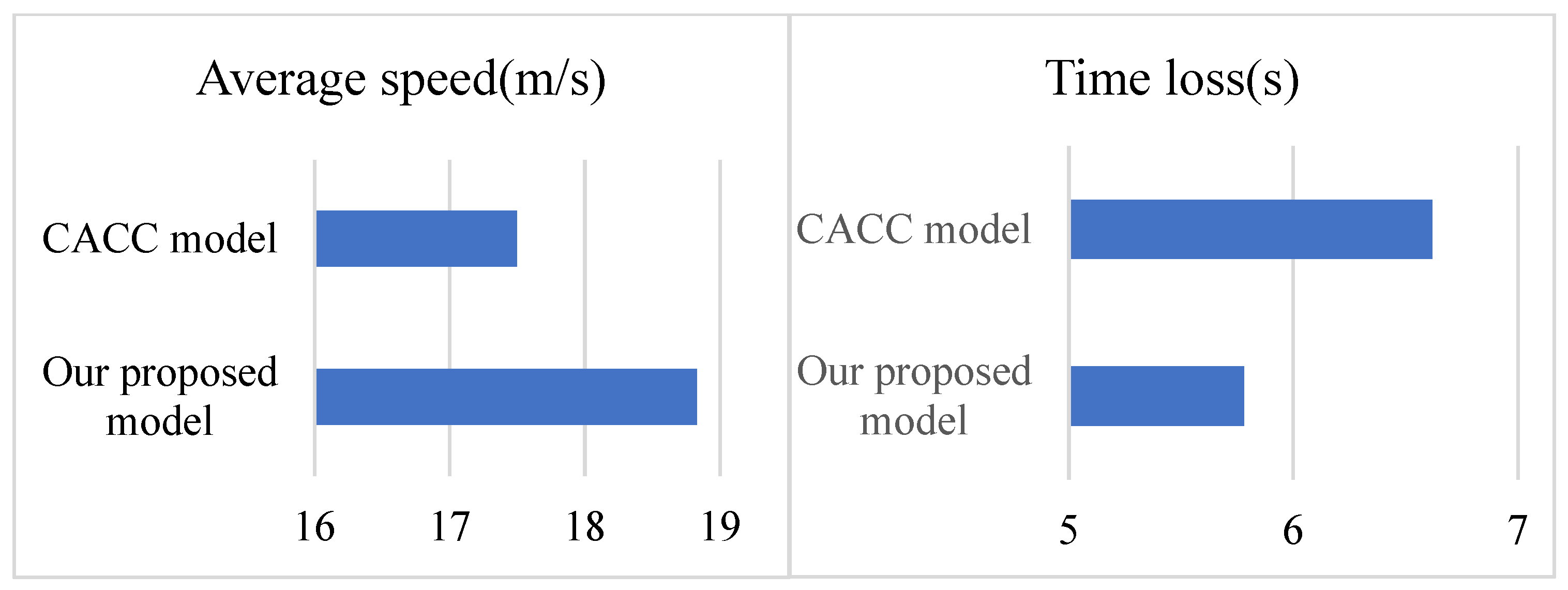
After SUMO simulations, the number of vehicles entering the lanes, the number of vehicles leaving the lanes, the average speed, and the time loss of the proposed collision avoidance model and the CACC model are obtained. Figure 5 shows the simulation results under the conventional CACC model, Figure 6 presents the simulation results under the proposed collision avoidance model, and Figure 7 compares the performance of the two models.
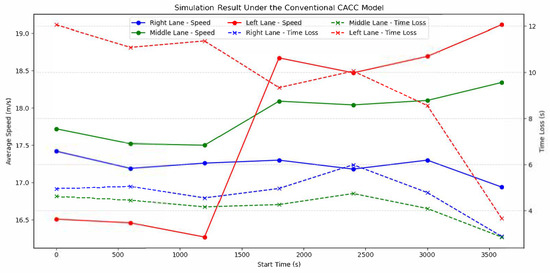
Figure 5.
Results under the conventional CACC model.
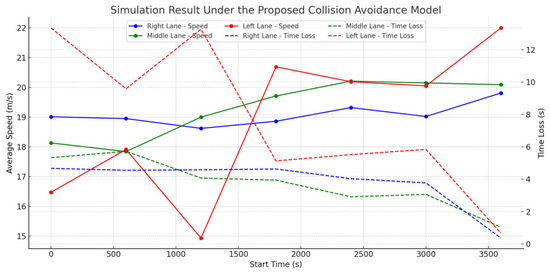
Figure 6.
Results under the proposed collision avoidance model.
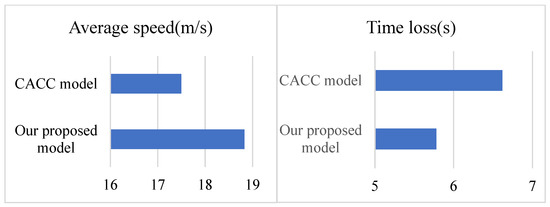
Figure 7.
Speed and time loss comparison of two models.
As can be seen from Figure 7, the average vehicle speed of the collision avoidance model is greater than that of the CACC model, and the average time loss of the collision avoidance model is less than that of the CACC model.
4.2. Evaluation of Traffic Safety
A vehicle in SUMO can be equipped with a safety surrogate measure (SSM) device to record conflicts between the vehicle and other vehicles. In this study, a widely used safety indicator, time to collision (TTC), is adopted to be the SSM due to its ability to reflect crash potential and ease of computation. Hayward [22] defined TTC as “the time required for two vehicles to collide if they continue at their present speed and on the same path”. To be more specific, TTC represents the time required for two successive vehicles, occupying the same lane, to collide if they continue at their present speed when the following vehicle moves faster than the leading vehicle. The calculation of TTC is presented in Equation (9).
where denotes the distance between the leading and following vehicles, is the position of the leading vehicle, is the position of the following vehicle, is the speed of the leading vehicle, is the speed of the following vehicle. In this experiment, a conflict is recorded when the TTC between the subject vehicle and its preceding vehicle is less than 3 s.
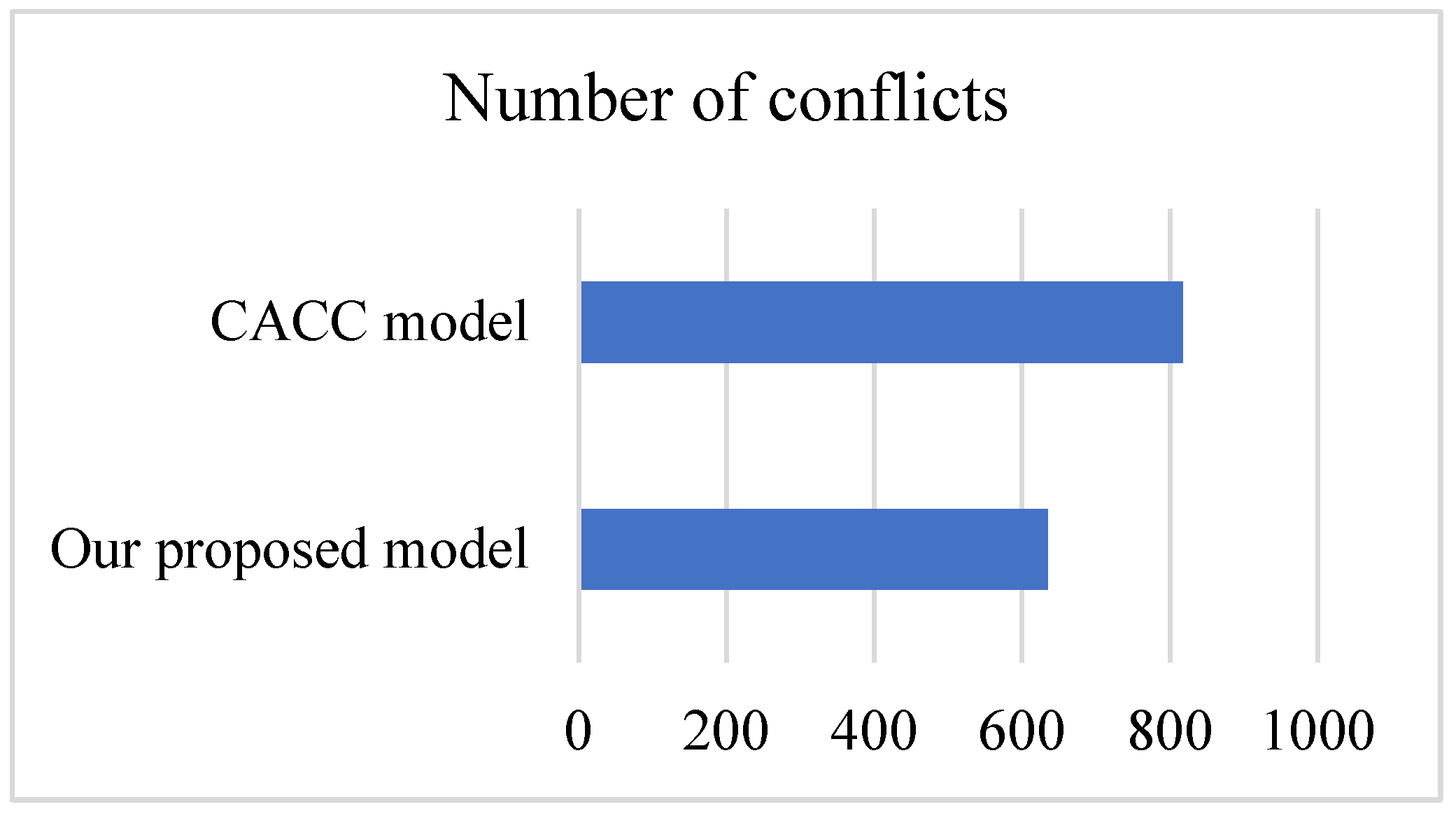
According to the records generated by the SSM device, the total number of conflicts under the CACC model is 817, and the total number of conflicts under the proposed collision avoidance model is 635, the comparison of the two models is shown in Figure 8. The experimental results indicate that the proposed collision avoidance model benefits not only traffic efficiency but also road safety.
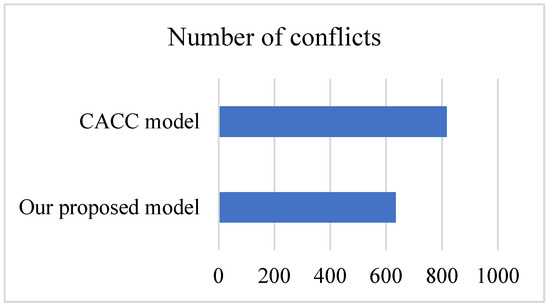
Figure 8.
Number of conflicts under two models.
5. Conclusions
Lateral collision avoidance remains a significant challenge when CAVs and HVs coexist on multi-lane roadways, particularly in accident-prone scenarios—a gap that has been scarcely addressed in the existing literature. Aiming at this problem, this paper proposes a proactive collision avoidance model for mixed operation of CAVs and HVs.
In the proposed model, the longitudinal following speed and lateral lane-change decisions of a CAV are regulated by a rule-based collision avoidance framework. Specifically, upon detecting an accident in its vicinity, the subject CAV first checks the type of the preceding vehicle, then judges the preceding vehicle’s acceleration rate and the surrounding lane conditions. Under different surrounding conditions, the subject CAV can choose to continue following the preceding vehicle at recommended speed, or decelerate directly, or continue searching for lane-change opportunities, or change lane directly, or change lanes with the cooperation of other CAVs. To validate the model’s efficacy, Python-SUMO simulation experiments were conducted. The simulation scenario involved a two-kilometer three-lane freeway with 50% CAVs and 50% HVs in mixed traffic. Nine accident vehicles were placed on the freeway, and TTC was considered as the safety measure for the mixed traffic. The proposed collision avoidance model was compared to the CACC model. Experimental results demonstrate that the proposed model outperforms the CACC model across key performance indicators: average speed, average time loss, and the number of conflicts. These improvements confirm the great advantages of the proposed collision avoidance model in enhancing both traffic efficiency and safety under the mixed traffic environment.
In future work, we plan to enhance the rule-based collision avoidance model by incorporating learning-based adaptability, such as reinforcement learning and large language model, to better handle dynamic traffic behaviors. Additionally, we aim to extend the model to more complex scenarios (e.g., highway merges and urban intersections) to assess its generalizability under higher traffic complexity.
Author Contributions
The authors confirm contributions to the paper as follows: data collection: G.H., K.L. and Y.Z.; study conception and design: W.L.; analysis and interpretation: W.L. and G.H.; draft manuscript preparation: W.L., G.H., O.C. and C.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (grant number 62303343).
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare that there is no conflict of interest in any aspect of the data collection, analysis, or the funding received regarding the publication of this paper.
References
- Lv, P.; Han, J.; Nie, J.; Zhang, Y.; Xu, J.; Cai, C.; Chen, Z. Cooperative decision-making of connected and autonomous vehicles in an emergency. IEEE Trans. Veh. Technol. 2022, 72, 1464–1477. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, Z.; Jiang, R.; Zhu, F.; Yan, R.; Shang, Y. A multi-agent reinforcement learning-based longitudinal and lateral control of CAVs to improve traffic efficiency in a mandatory lane change scenario. Transp. Res. Part C Emerg. Technol. 2024, 158, 104445. [Google Scholar] [CrossRef]
- Sheikh, M.S.; Peng, Y. A collision avoidance model for on-ramp merging of autonomous vehicles. KSCE J. Civ. Eng. 2023, 27, 1323–1339. [Google Scholar] [CrossRef]
- Zhou, J.; Zhu, F. Analytical analysis of the effect of maximum platoon size of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2021, 122, 102882. [Google Scholar] [CrossRef]
- Hu, X.; Sun, J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area. Transp. Res. Part C Emerg. Technol. 2019, 101, 111–125. [Google Scholar] [CrossRef]
- Wu, B.; Qian, L.; Lu, M.; Qiu, D.; Liang, H. Optimal control problem of multi-vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment. IET Intell. Transp. Syst. 2019, 13, 1677–1685. [Google Scholar] [CrossRef]
- Zheng, Y.; Yao, Z.; Xu, Y.; Qu, X.; Ran, B. Lane management for mixed traffic flow on roadways considering the car-following behaviors of human-driven vehicles to follow connected and automated vehicles. Phys. A Stat. Mech. Its Appl. 2024, 635, 129503. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, H. Cell transmission model for mixed traffic flow with connected and autonomous vehicles. J. Transp. Eng. Part A Syst. 2019, 145, 04019014. [Google Scholar] [CrossRef]
- Rahman, M.S.; Abdel-Aty, M.; Lee, J.; Rahman, M.H. Safety benefits of arterials’ crash risk under connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 100, 354–371. [Google Scholar] [CrossRef]
- Silgu, M.A.; Erdağı, İ.G.; Göksu, G.; Celikoglu, H.B. Combined control of freeway traffic involving cooperative adaptive cruise controlled and human driven vehicles using feedback control through SUMO. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11011–11025. [Google Scholar] [CrossRef]
- Li, Y.; Pan, B.; Xing, L.; Yang, M.; Dai, J. Developing dynamic speed limit strategies for mixed traffic flow to reduce collision risks at freeway bottlenecks. Accid. Anal. Prev. 2022, 175, 106781. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Ma, M.; Liang, S.; Yang, J.; Wang, Y. Robust lane change decision for autonomous vehicles in mixed traffic: A safety-aware multi-agent adversarial reinforcement learning approach. Transp. Res. Part C Emerg. Technol. 2025, 172, 105005. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Smith, B.L.; Fontaine, M.D.; Ma, J.; Khattak, A.J. Active lane management and control using connected and automated vehicles in a mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2022, 139, 103648. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Wang, B.; Li, M. Collision avoidance motion planning for connected and automated vehicle platoon merging and splitting with a hybrid automaton architecture. IEEE Trans. Intell. Transp. Syst. 2023, 25, 1445–1464. [Google Scholar] [CrossRef]
- Muzahid, A.J.M.; Kamarulzaman, S.F.; Rahman, M.A.; Murad, S.A.; Kamal, M.A.S.; Alenezi, A.H. Multiple vehicle cooperation and collision avoidance in automated vehicles: Survey and an AI-enabled conceptual framework. Sci. Rep. 2023, 13, 603. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Liu, Q.; Fu, J.; Liufu, K.; Li, Q. Collision-avoidance lane change control method for enhancing safety for connected vehicle platoon in mixed traffic environment. Accid. Anal. Prev. 2023, 184, 106999. [Google Scholar] [CrossRef] [PubMed]
- Du, R.; Chen, S.; Li, Y.; Ha, P.Y.J.; Dong, J.; Anastasopoulos, P.C.; Labi, S. A cooperative crash avoidance framework for autonomous vehicle under collision-imminent situations in mixed traffic stream. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: New York, NY, USA, 2021; pp. 1997–2002. [Google Scholar]
- Chen, Y.; Dong, C.; Lyu, K.; Shi, X.; Han, G.; Wang, H. A review of car-following and lane-changing models under heterogeneous environments. Phys. A Stat. Mech. Its Appl. 2024, 654, 130127. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Porfyri, K.N.; Mintsis, E.; Mitsakis, E. Assessment of ACC and CACC systems using SUMO. EPiC Ser. Eng. 2018, 2, 82–93. [Google Scholar]
- Hayward, J. Near Misses as a Measure of Safety at Urban Intersections. Ph.D. Thesis, Department of Civil Engineering, The Pennsylvania State University, University Park, State College, PA, USA, 1971. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).