
Recommendations for Preventing Free-Stroke Failures in Electric Vehicle Suspension Dampers Based on Experimental and Numerical Approaches


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
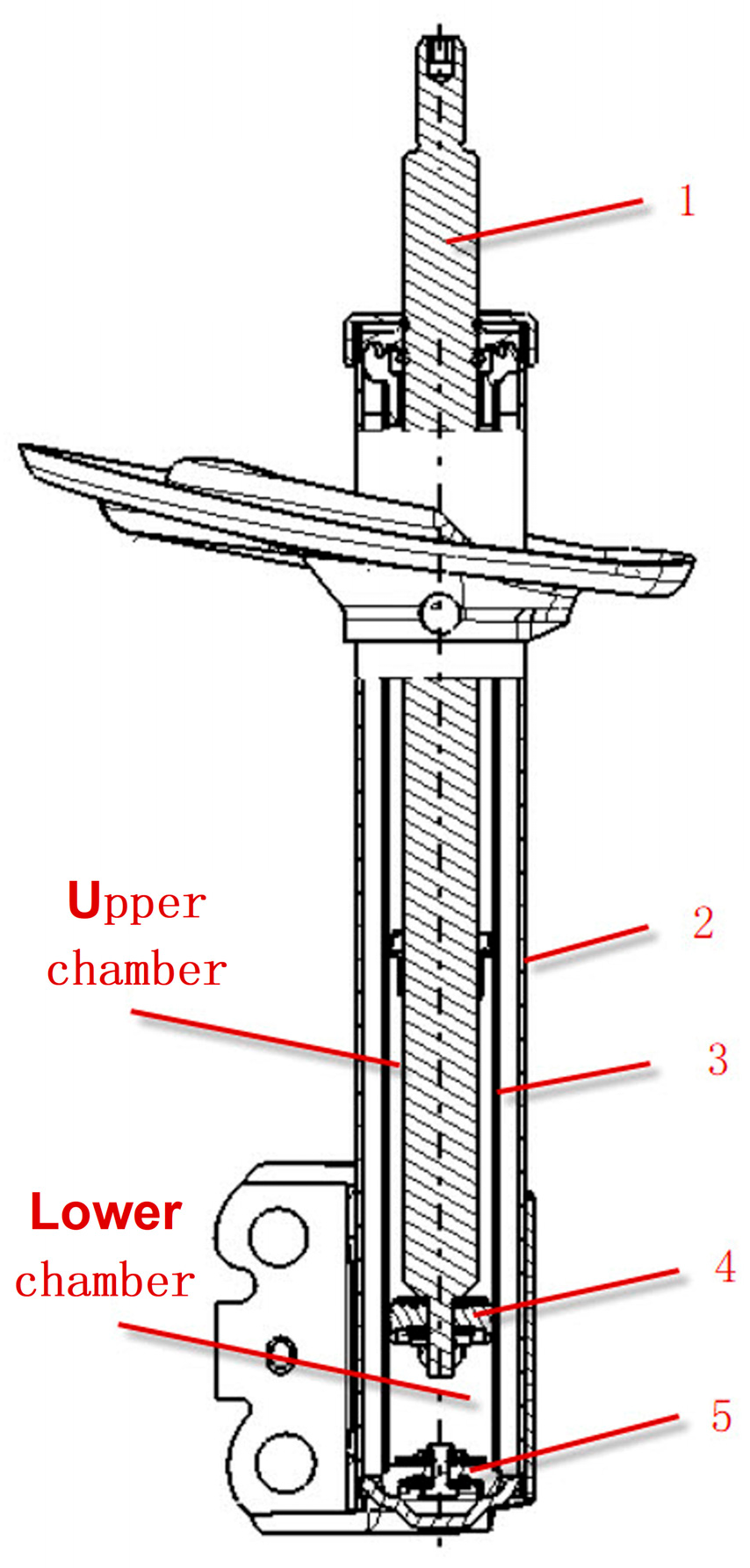
2. Cause Analysis of Oil-Hydraulic Damper Free Stroke
2.1. Damper Oil Cavitation Mechanism
2.2. Damper Cavitation Parameter Model [23]
3. FSI-Based Finite Element Analysis Approach
3.1. FSI Finite Element Mathematical Model [25]
3.2. FSI FM Analysis Based on ADINA
- (1)
- Ensuring the accurate transmission of interaction forces across the fluid–solid coupling interface.
- (2)
- Enabling efficient solutions in FSI systems
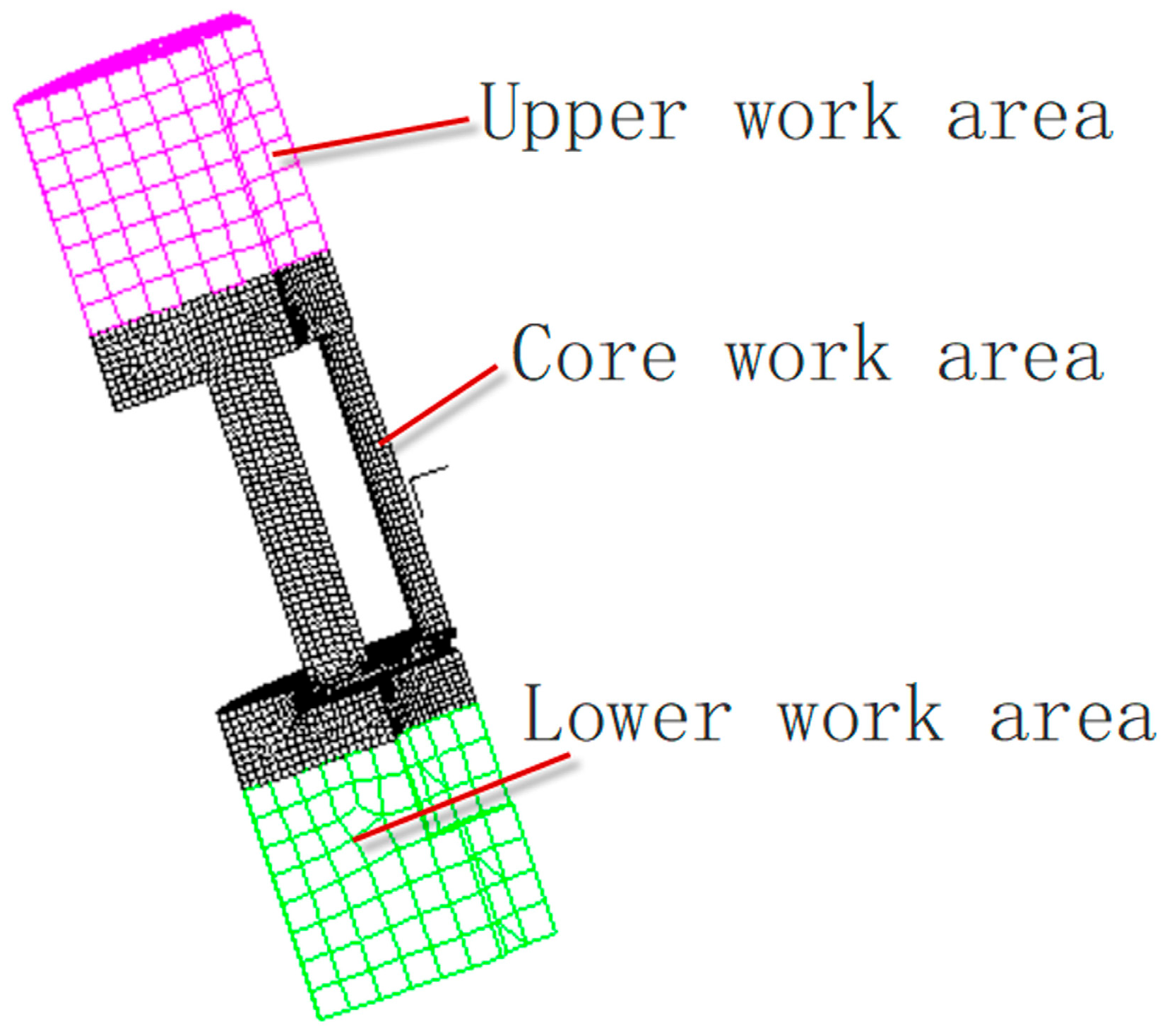
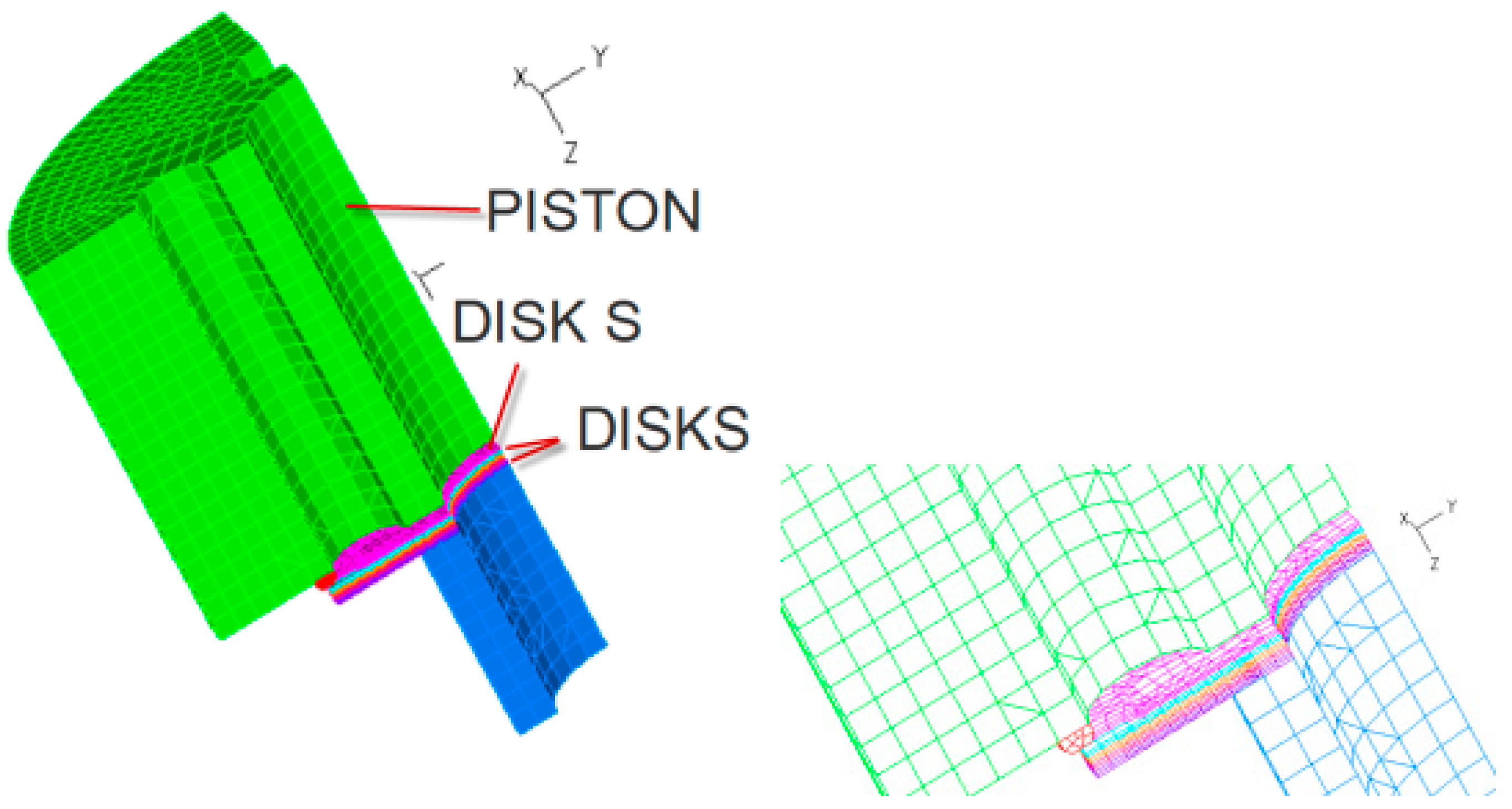
3.3. Establishment of FEM for Oil Damper Stacks with Throttle Systems
- (1)
- Given the symmetrical nature of the damper valve system, a 1/4 finite element model is sufficient to meet the analysis requirements.
- (2)
- Converting the sum of the disk-sheet areas to the contact areas does not affect the accuracy of the calculation.
- (3)
- The piston chamfer is removed from the valve system to avoid mesh distortion.
3.4. Numerical Results Analysis
3.4.1. Analysis of Fluid Simulation Results
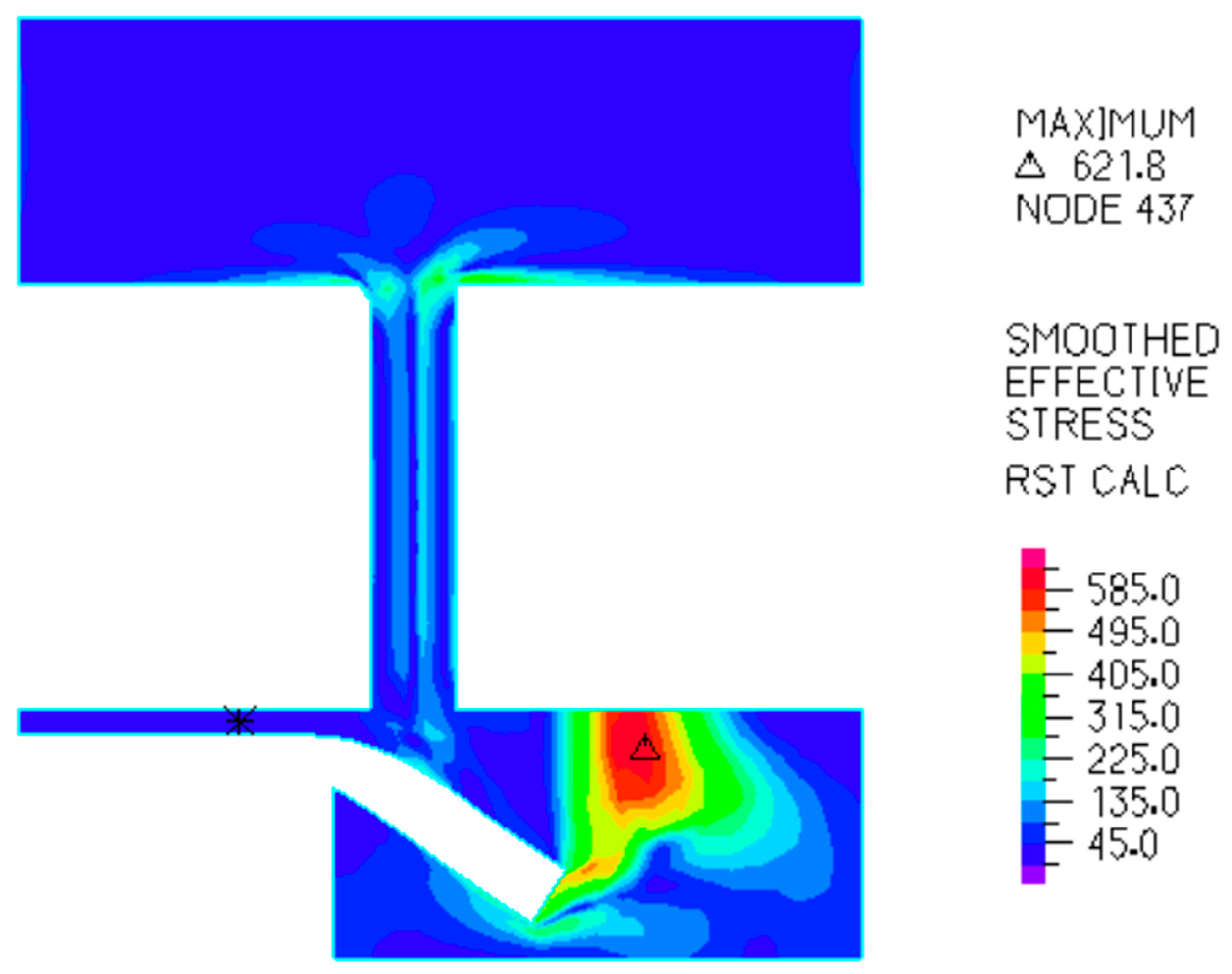
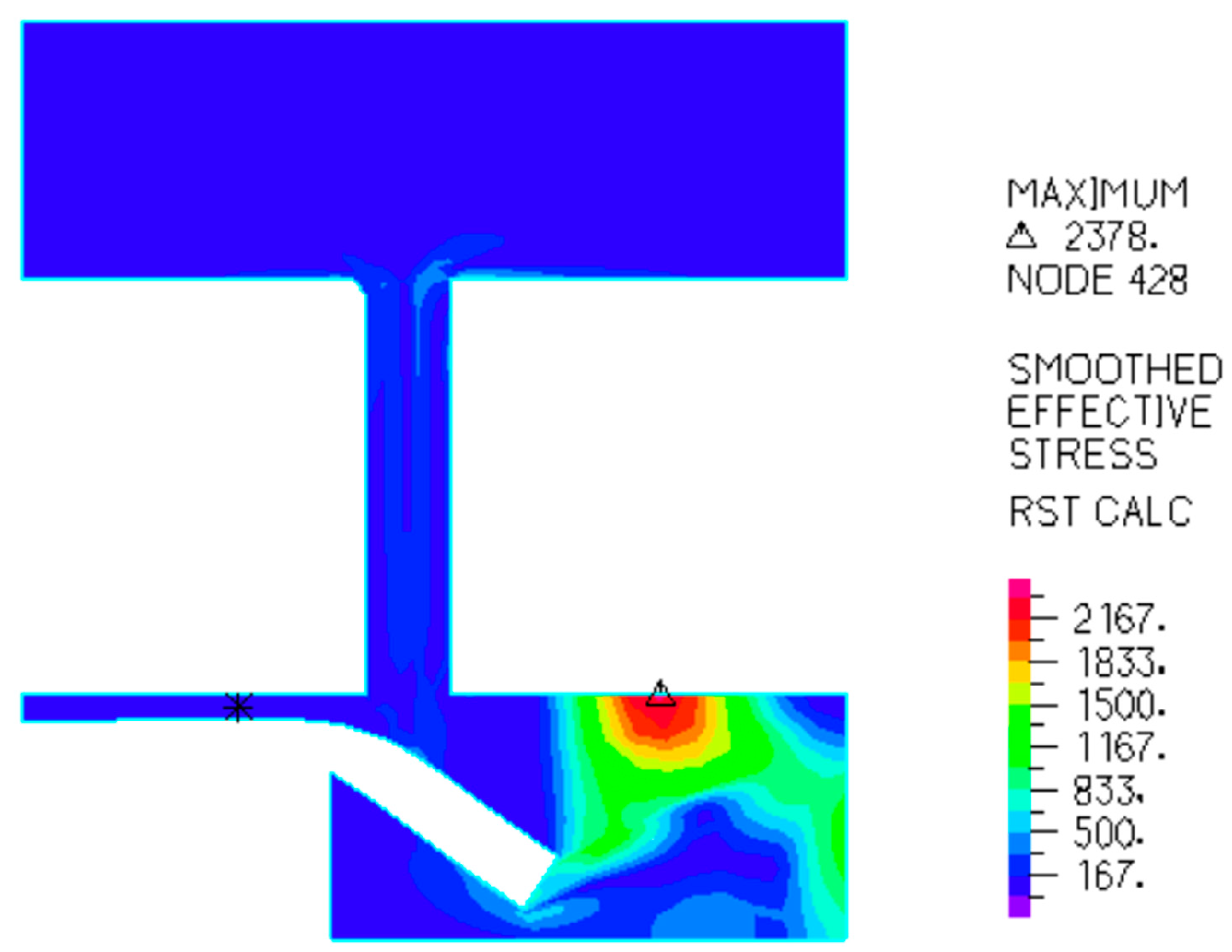
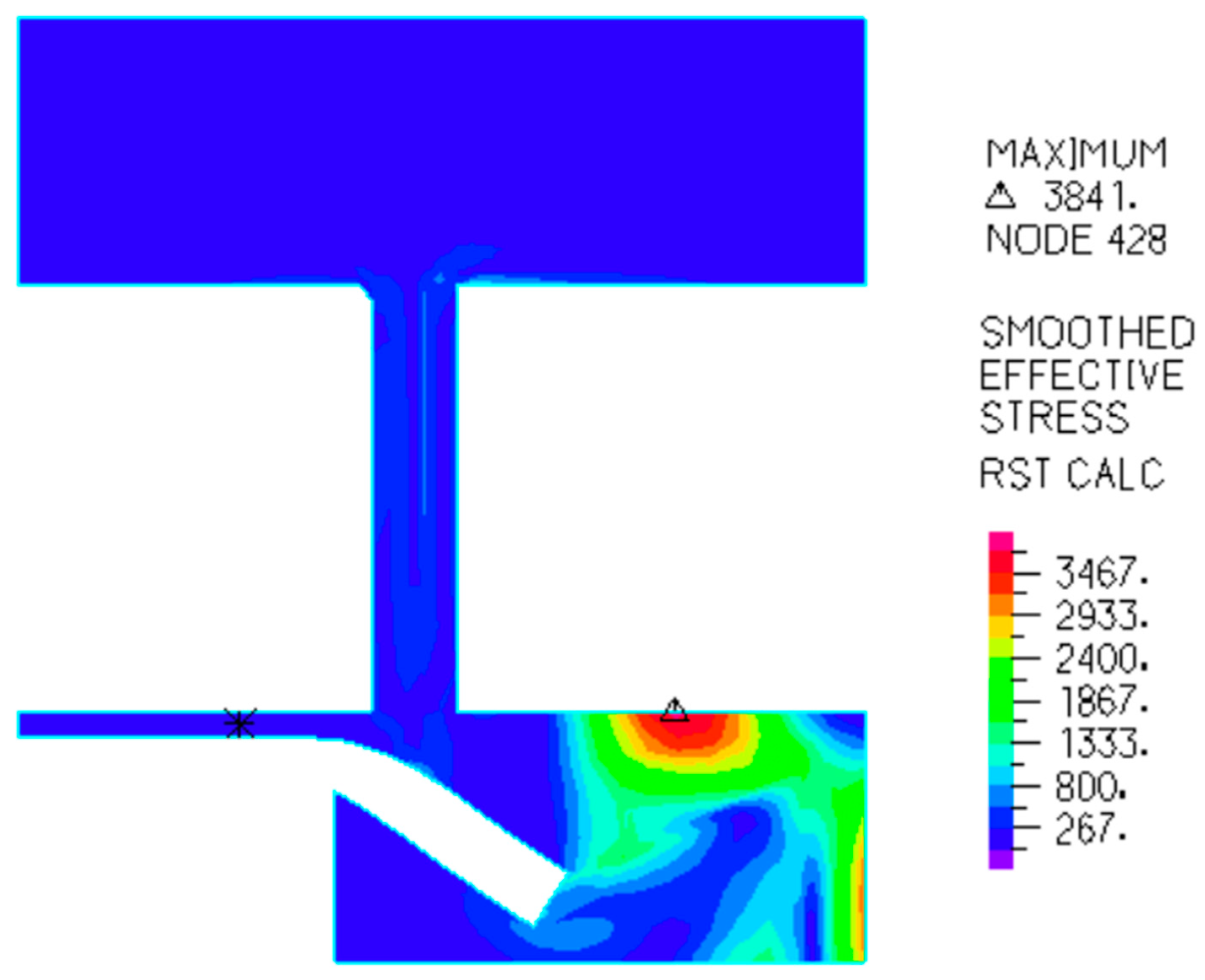
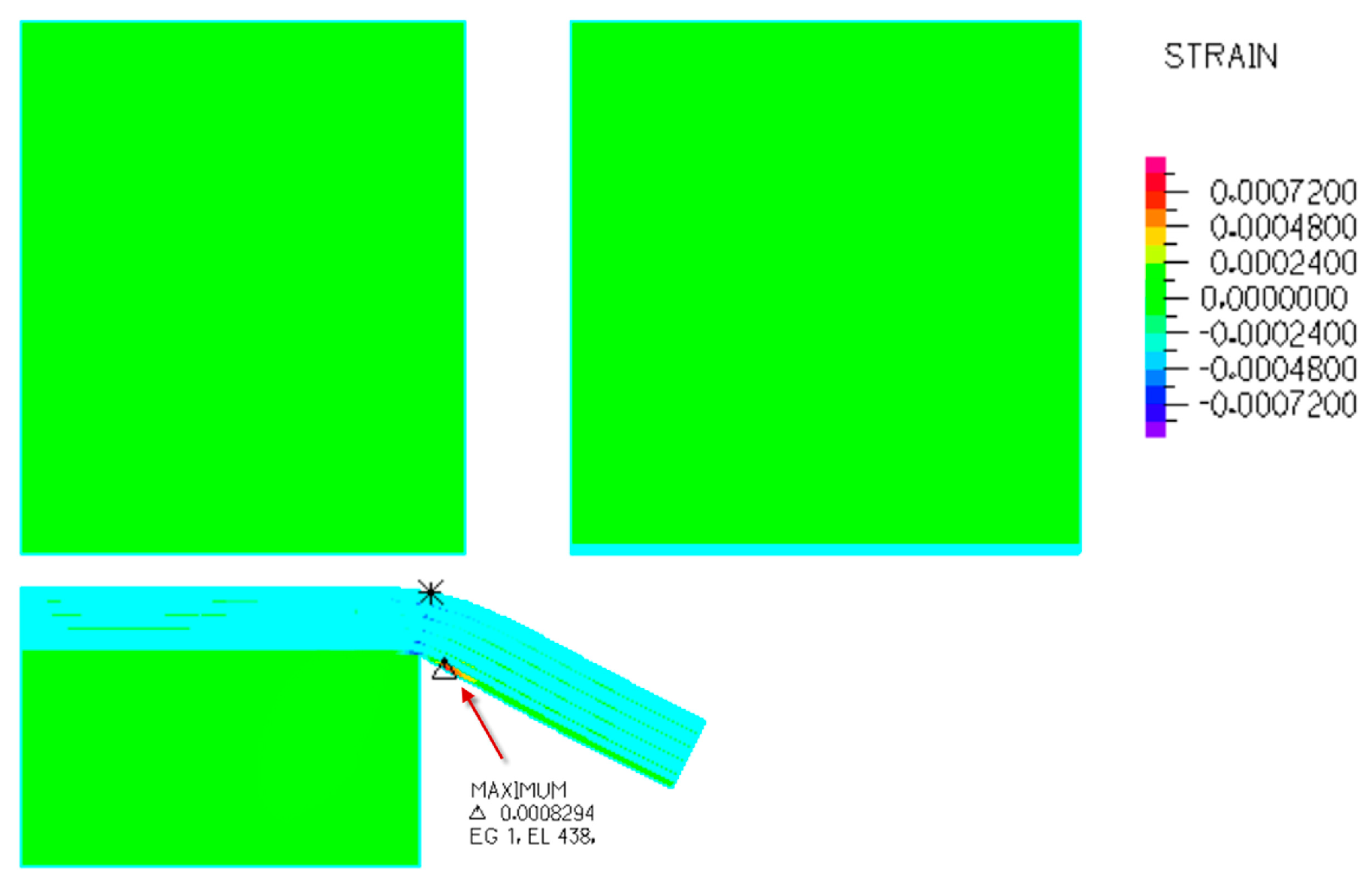
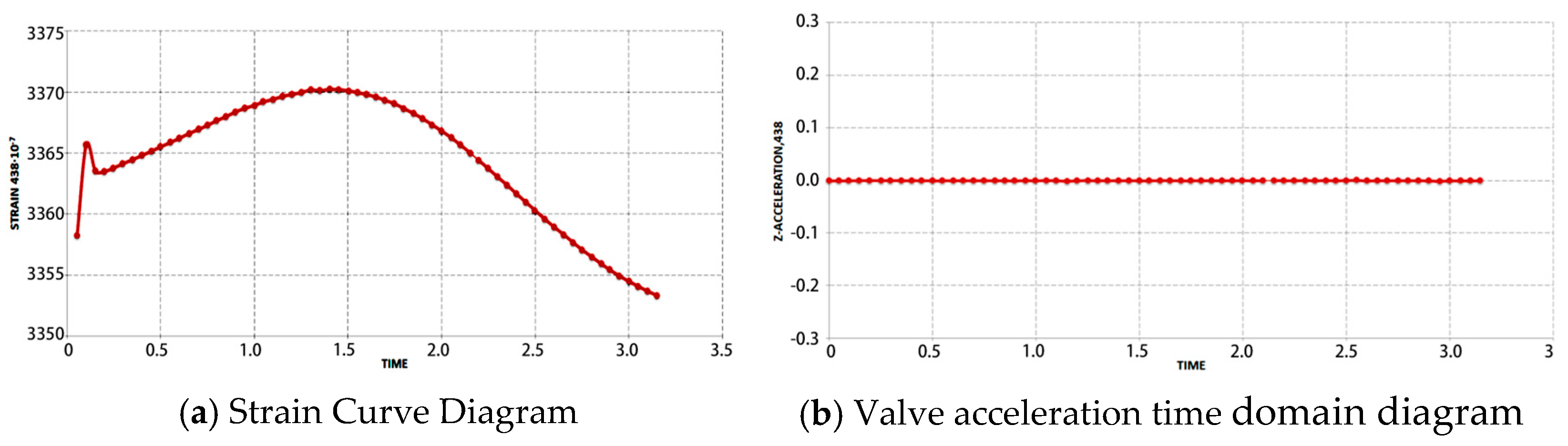
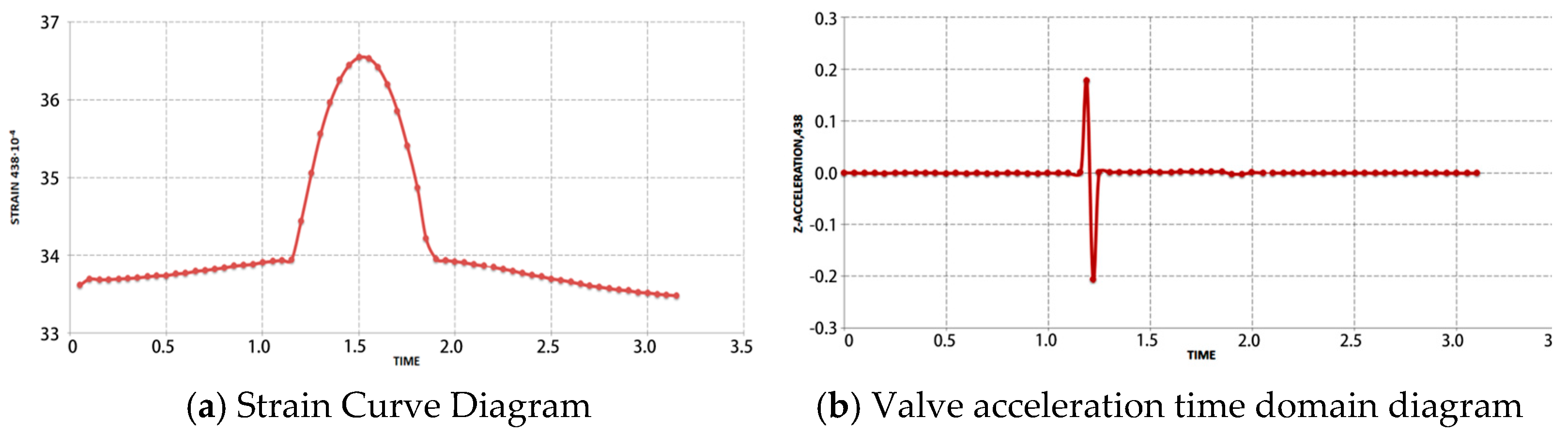
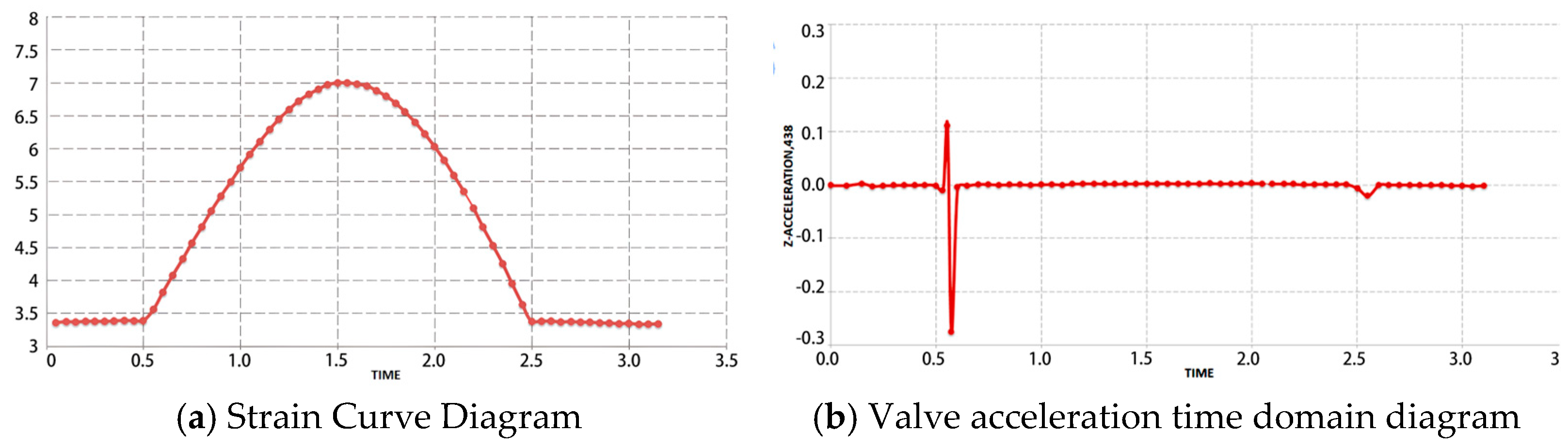
3.4.2. Analysis of Solid Simulation Results
4. Experimental Verification
4.1. The Purpose and Requirements of Damper Noise Test
4.2. Analysis of Experimental Results
4.3. The Purpose and Requirements of the Damper Indicator Bench Test
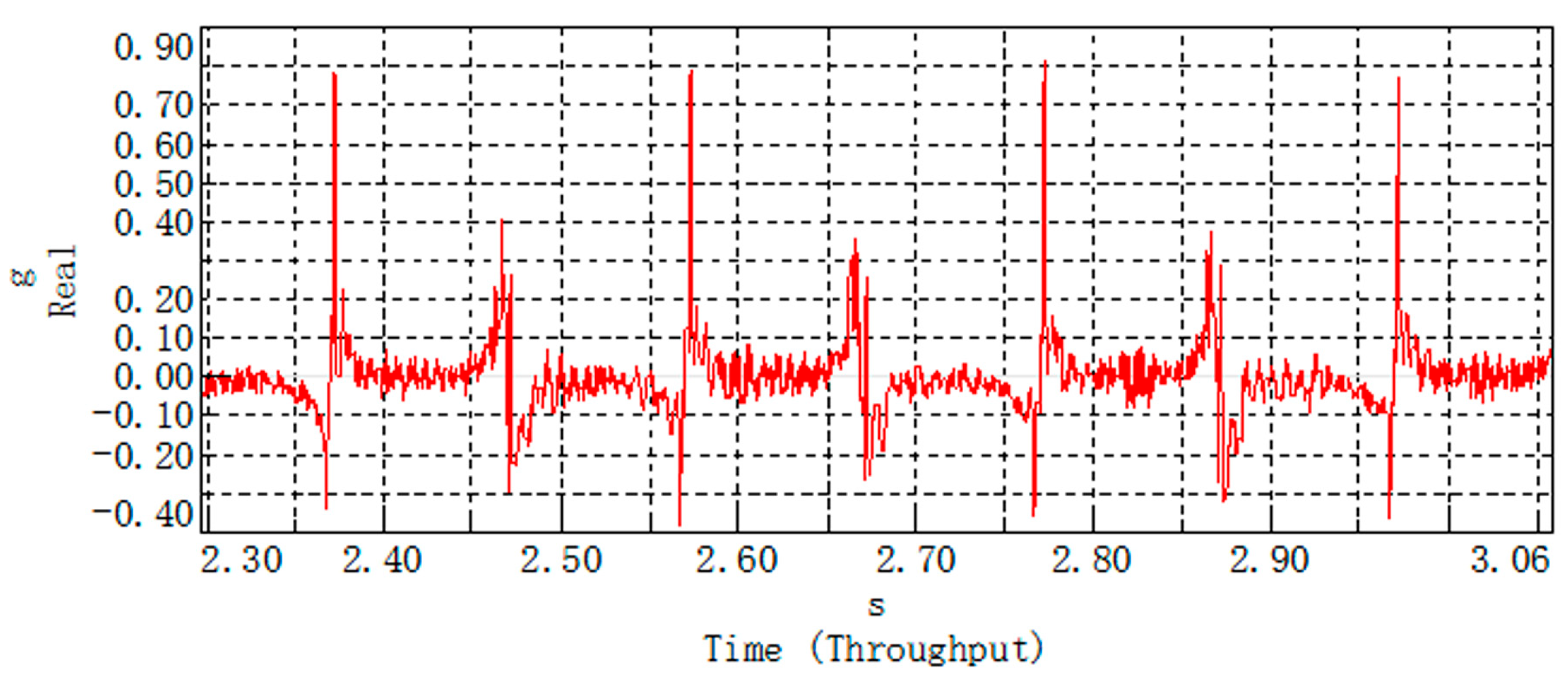
4.4. Analysis of Experimental Result
5. Conclusions
- (1)
- As piston speed increases, the occurrence of cavitation near the damper valve system becomes more pronounced. The maximum strain on the valves is concentrated internally, with a peak value of approximately 7 × 10−3. As cavitation intensifies, both the magnitude and duration of the strain increase. Furthermore, the outer edges show the greatest displacement of the valves. These insights provide a strategic approach to prevent performance distortion.
- (2)
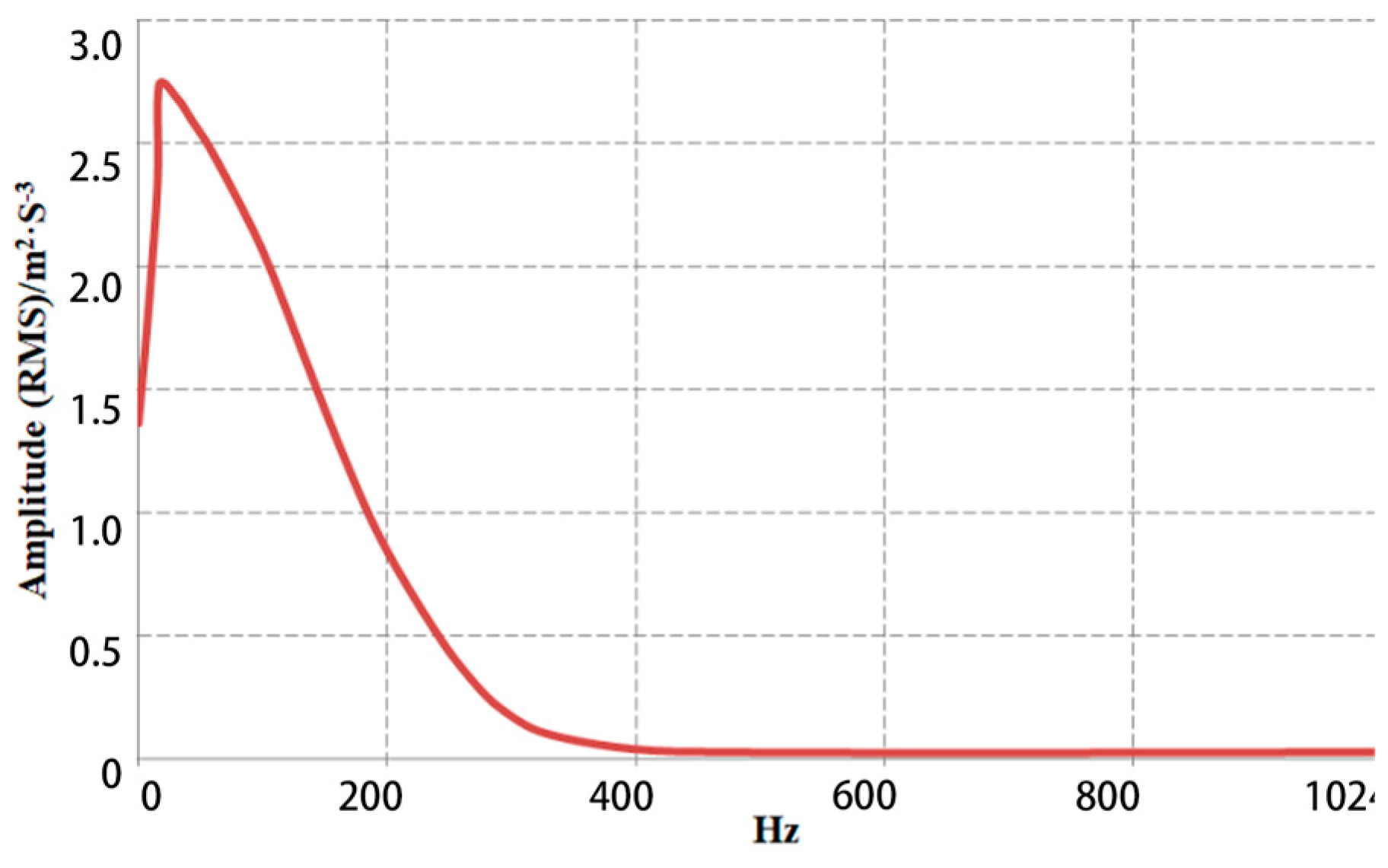
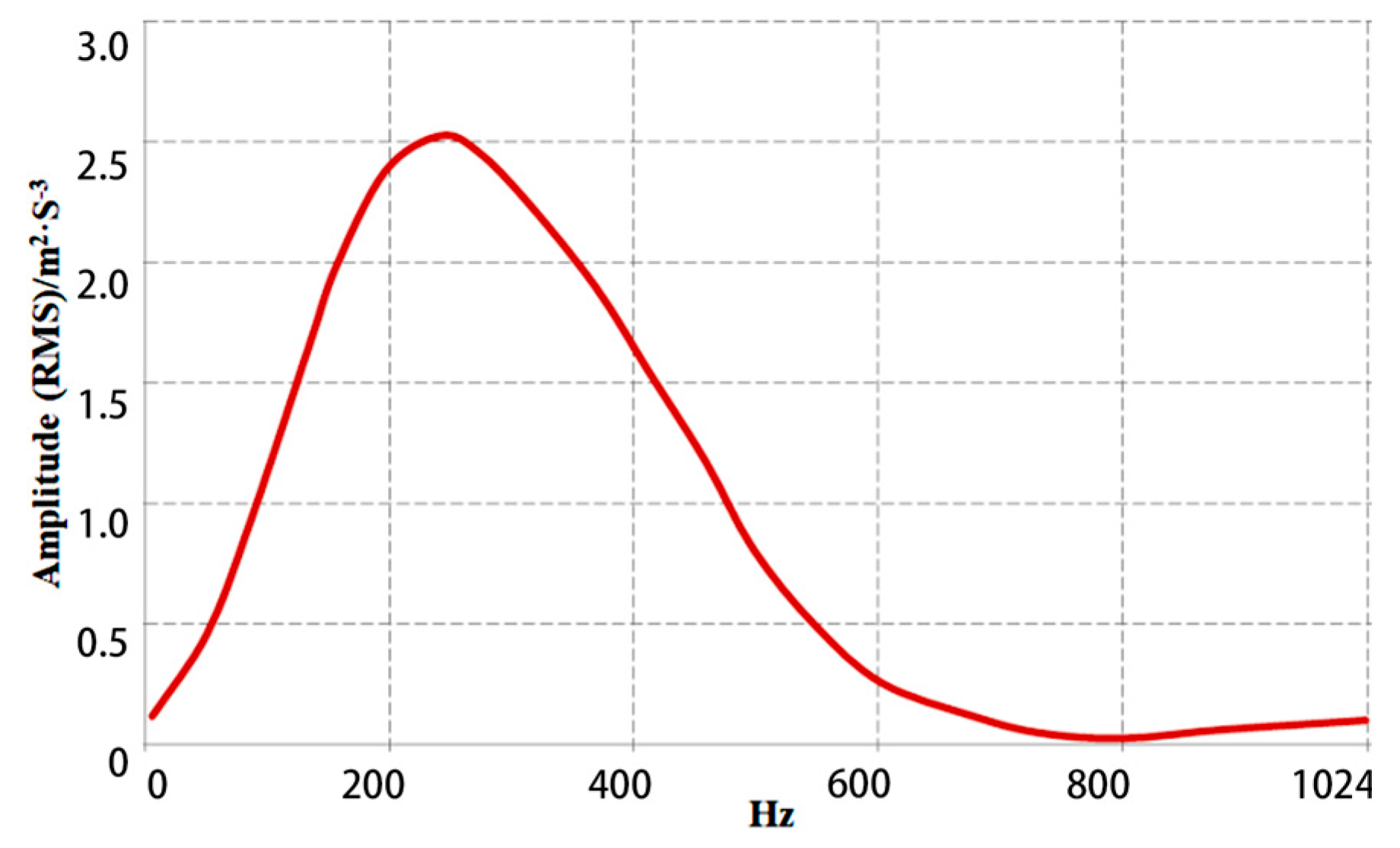
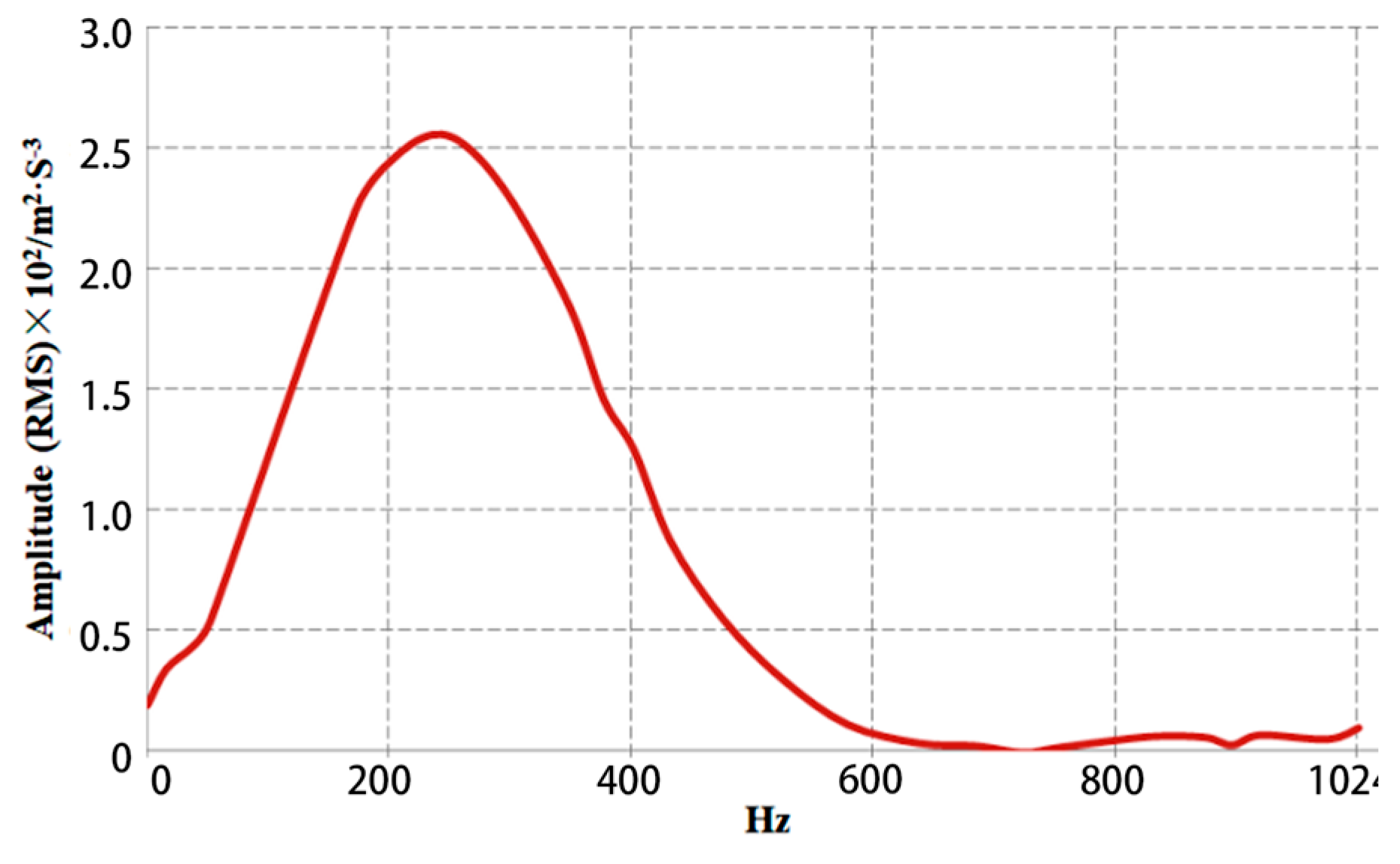
- The self-spectral density of 0.6 m/s reaches a maximum value of 255 g at about 250 Hz, while 0.3 m/s reaches a maximum value of 2.7 g at about 50 Hz. The peak values of self-spectral density are not much affected by cavitation. As the cavitation becomes more pronounced, the amplitude increases, which causes an increase in abnormal noise from the vibration damper.
- (3)
- Two different experimental methods were employed to validate the accuracy of the finite element simulation for the fluid–structure interaction (FSI) of the damper. By adjusting the model parameters, occurrences of free stroke within the damper can be prevented, thereby reducing dependence on experimental trials during the development phase of the damper valve system and enhancing its development efficiency.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, M.R.; Yusoff, A.R.; Romlay, F.R.M. Adjustable valve semi-Active suspension system for passenger car. Int. J. Automot. Mech. Eng. 2019, 16, 6470–6481. [Google Scholar] [CrossRef]
- Meng, X.; Kong, L.; Ding, R.; Liu, W.; Wang, R. Research on Active Suspension Control Based on Vehicle Speed Control Under Transient Pavement Excitation. World Electr. Veh. J. 2025, 16, 232. [Google Scholar] [CrossRef]
- Lu, X.; Chen, H.; He, X. A Frequency Domain Fitting Algorithm Method for Automotive Suspension Structure under Colored Noise. World Electr. Veh. J. 2024, 15, 410. [Google Scholar] [CrossRef]
- Graczykowski, C.; Faraj, R. Development of control systems for fluid-based adaptive impact absorbers. Mech. Syst. Signal Process. 2019, 122, 622–641. [Google Scholar] [CrossRef]
- Schickhofer, L.; Wimmer, J. Fluid–structure interaction and dynamic stability of shock absorber check valves. J. Fluids Struct. 2022, 110, 103536. [Google Scholar] [CrossRef]
- Deshmane, S.M.; Dhage, P.P.; Gaikwad, V.J.; Mali Pravin, K.; Daspute, S.G. Magnetic suspension system with electricity generation. Int. J. Adv. Res. Innov. Ideas Educ. 2017, 3, 1880–1889. [Google Scholar]
- Qi, H.; Chen, Y.; Zhang, N.; Zhang, B.; Wang, D.; Tan, B. Improvement of both handling stability and ride comfort of a vehicle via coupled hydraulically interconnected suspension and electronic controlled air spring. Proceedings of the Institution of Mechanical Engineers, Part D. J. Automob. Eng. 2020, 234, 552–571. [Google Scholar] [CrossRef]
- Zou, J.; Guo, X.; Abdelkareem, M.A.; Xu, L.; Zhang, J. Modelling and ride analysis of a hydraulic interconnected suspension based on the hydraulic energy regenerative shock absorbers. Mech. Syst. Signal Process. 2019, 127, 345–369. [Google Scholar] [CrossRef]
- Carabias, E.; Cabrera, J.; Castillo, J.; Pérez, J.; Alcázar, M. Non-intrusive determination of shock absorber characteristic curves by means of evolutionary algorithms. Mech. Syst. Signal Process. 2023, 182, 109583. [Google Scholar] [CrossRef]
- Faraj, R.; Holnicki-Szulc, J.; Knap, L.; Seńko, J. Adaptive inertial shock-absorber. Smart Mater. Struct. 2016, 25, 035031. [Google Scholar] [CrossRef]
- Yu, L.; Ye, L.; Wang, Q.; Huang, G. Design and dynamics investigation for a silicone rubber damper. J. Macromol. Sci.-Phys. 2011, 50, 540–550. [Google Scholar] [CrossRef]
- Pracny, V.; Meywerk, M.; Lion, A. Full vehicle simulation using thermomechanically coupled hybrid neural network damper model. Veh. Syst. Dyn. 2008, 46, 229–238. [Google Scholar] [CrossRef]
- Alsaydalan, M. Influence of cavitation phenomenon on the hydraulic behavior of leaks in water distribution systems. J. Water Supply Res. Technol.-Aqua. 2017, 66, 327–339. [Google Scholar] [CrossRef]
- Chen, Q.-P.; Shu, H.-Y.; Fang, W.-Q.; He, L.-G.; Yang, M.-J. Fluid structure interaction for circulation valve of hydraulic damper. J. Cent. South Univ. 2013, 20, 648–654. [Google Scholar] [CrossRef]
- Luo, T.; Jin, R.; Jiang, J. Hydraulic model and cavitations of hydraulic Buffer. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2014, 33, 153–156. [Google Scholar]
- An, C.; Cao, Y.; Zhang, J. Hydraulic damper orifice cavitation and noise analysis. J. Shanghai Jiaotong Univ. 2018, 52, 297–304. [Google Scholar]
- Skrickij, V.; Savitski, D.; Ivanov, V.; Skačkauskas, P. Investigation of cavitation process in monotube shock absorber. Int. J. Automot. Technol. 2018, 19, 801–810. [Google Scholar] [CrossRef]
- Witcher, D. Seismicanalysis of wind turbinesin the time domain. Wind Energy 2005, 8, 81–91. [Google Scholar] [CrossRef]
- Syrakos, A.; Dimakopoulos, Y.; Tsamopoulos, J. Theoretical study of the flow in a fluid damper containing high viscosity silicone oil: Effects of shear-thinning and viscoelasticity. Phys. Fluids 2018, 30, 030708. [Google Scholar] [CrossRef]
- Hassanzadeh, A.; Bakhsh, M.S.; Dadvand, A. Numerical study of the effect of wall injection on the cavitation phenomenon in diesel injector. Eng. Appl. Comput. Fluid Mech. 2014, 8, 562–573. [Google Scholar] [CrossRef]
- Chen, Q.; Wu, M.; Kang, S. Study on Heat Generating Mechanism of Hydraulic damper Based on CFD. Mach. Des. Manuf. 2021, 365, 141–147. [Google Scholar]
- Yuan, C.; Song, J.; Liu, M. Comparison of compressible and incompressible numerical methods in simulation of a cavitating jet through a poppet valve. Eng. Appl. Comput. Fluid Mech. 2019, 13, 67–90. [Google Scholar] [CrossRef]
- Zhou, C.C.; Wang, G.L.; Xu, W. Study on air pockets and rebound phenomena of tele-scope shock absorber. Hydraul. Pneum. 2007, 8, 3–7. [Google Scholar]
- Zhou, C.C.; Li, D. Analysis and study on hydraulic cavitation mechanism of dampers. Lift. Conveying Mach. 2008, 1, 53–56. [Google Scholar]
- ADINA R&D. ADINA: Theory and Modeling Guide Report ARD01-9.USA; ADINA Engineering Inc.: Watertown, MA, USA, 2001; pp. 235–262. [Google Scholar]
- Dou, W.; Guo, S.; Zhang, L.; Zhu, Y.; Stichel, S. A feature points-based method for data transfer in fluid-structure interaction. Int. J. Mech. Sci. 2022, 234, 107696. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, N.; Liu, S. Simulation analysis of dynamic nonlinear characteristics of vehicle damper based on fluid-structure interaction. J. Jilin Univ. (Eng. Technol. Ed.) 2015, 45, 16–21. [Google Scholar]
- ADINA R&D. ADINA-F Theory and Modeling Guide: ARD08-9; ADINA R&D, Inc.: Watertown, MA, USA, 2008; pp. 26–28, 230–262. [Google Scholar]
- Tandis, E.; Ashrafizadeh, A. A numerical study on the fluid compressibility effects in strongly coupled fluid–solid interaction problems. Eng. Comput. 2021, 37, 1217. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Yu, Z.; Liu, Z. Recommendations for Preventing Free-Stroke Failures in Electric Vehicle Suspension Dampers Based on Experimental and Numerical Approaches. World Electr. Veh. J. 2025, 16, 392. https://doi.org/10.3390/wevj16070392
Zhang N, Yu Z, Liu Z. Recommendations for Preventing Free-Stroke Failures in Electric Vehicle Suspension Dampers Based on Experimental and Numerical Approaches. World Electric Vehicle Journal. 2025; 16(7):392. https://doi.org/10.3390/wevj16070392
Chicago/Turabian StyleZhang, Na, Zhenhuan Yu, and Zhiyuan Liu. 2025. "Recommendations for Preventing Free-Stroke Failures in Electric Vehicle Suspension Dampers Based on Experimental and Numerical Approaches" World Electric Vehicle Journal 16, no. 7: 392. https://doi.org/10.3390/wevj16070392
APA StyleZhang, N., Yu, Z., & Liu, Z. (2025). Recommendations for Preventing Free-Stroke Failures in Electric Vehicle Suspension Dampers Based on Experimental and Numerical Approaches. World Electric Vehicle Journal, 16(7), 392. https://doi.org/10.3390/wevj16070392