
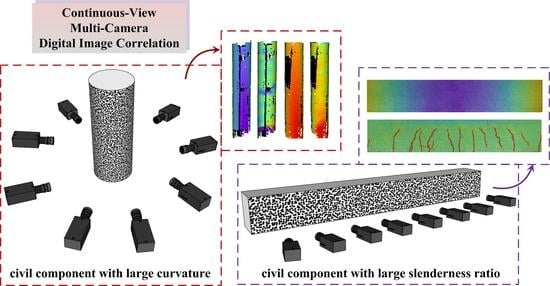
Multi-Camera Digital Image Correlation in Deformation Measurement of Civil Components with Large Slenderness Ratio and Large Curvature


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Fundamental Principles
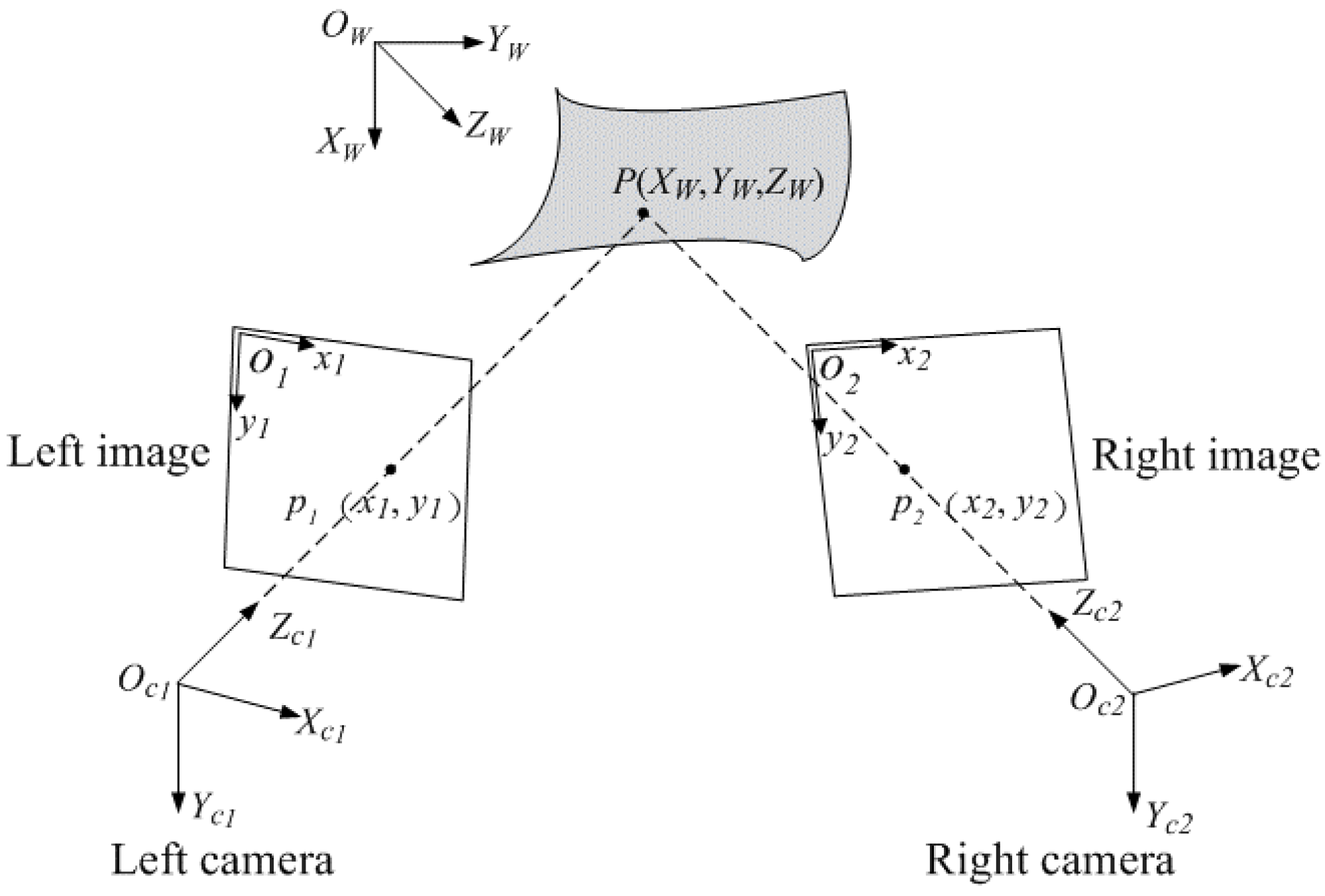
2.1. Principle of Stereo-DIC
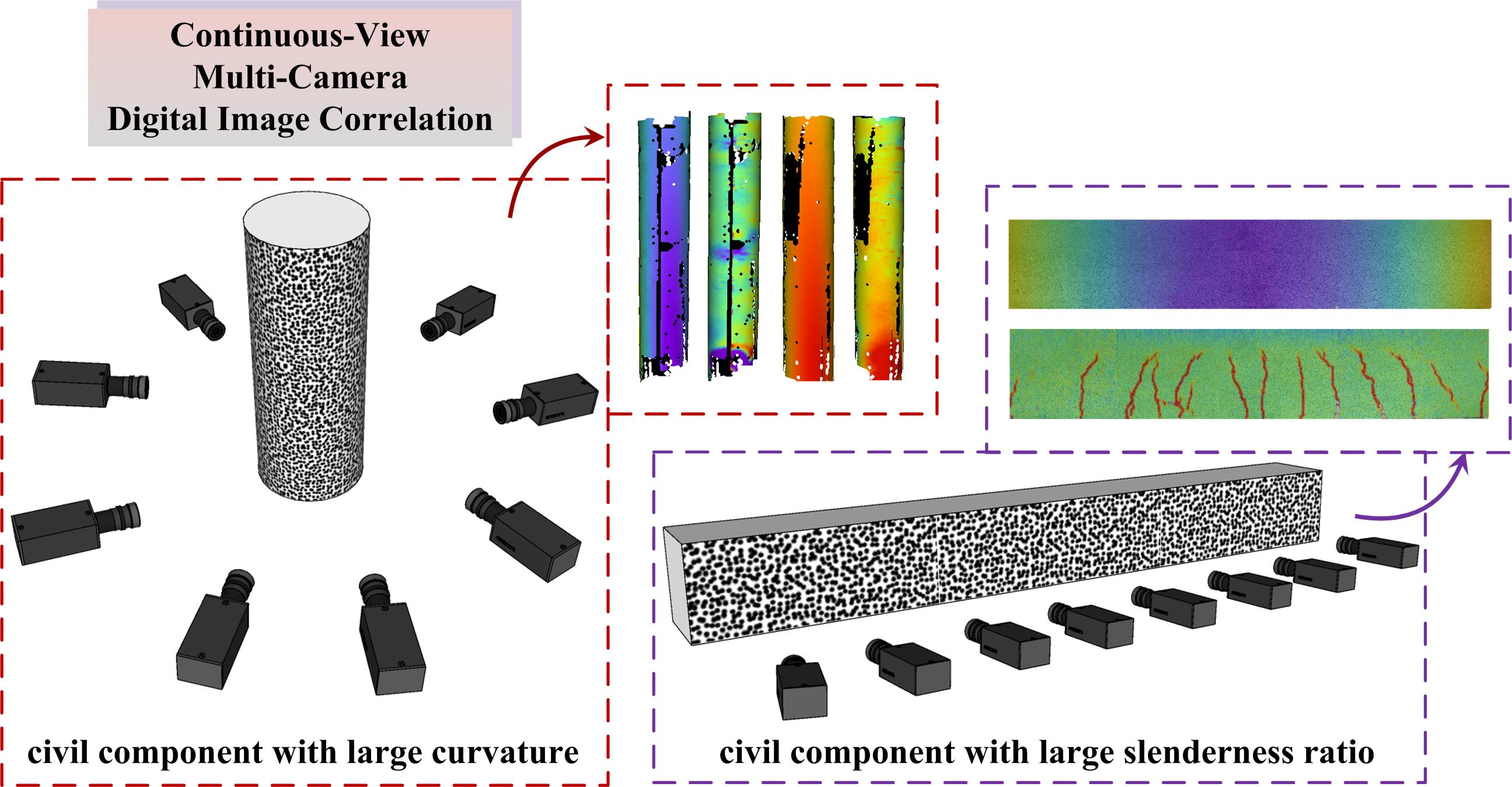
2.2. Principle of Continuous-View MC-DIC
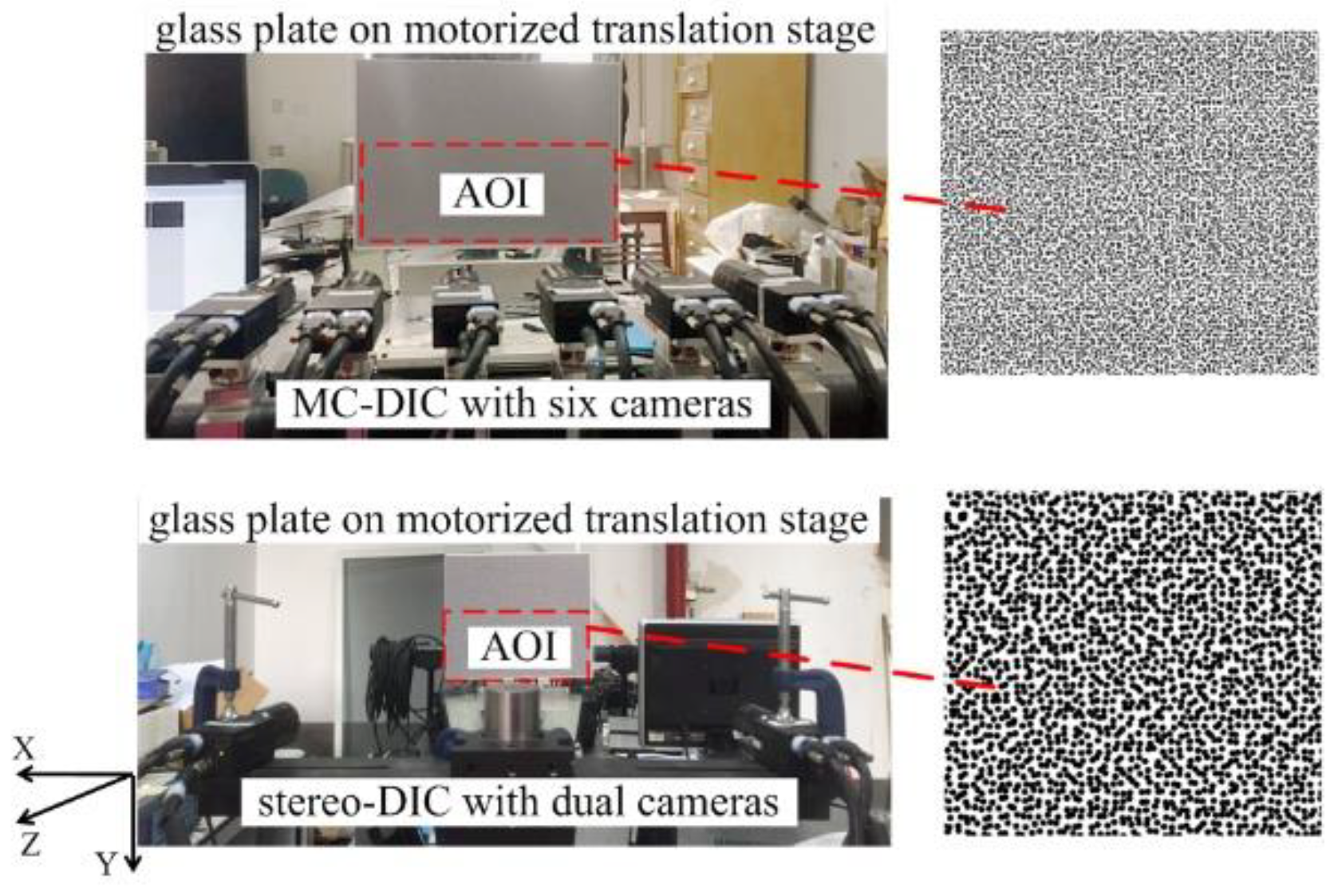
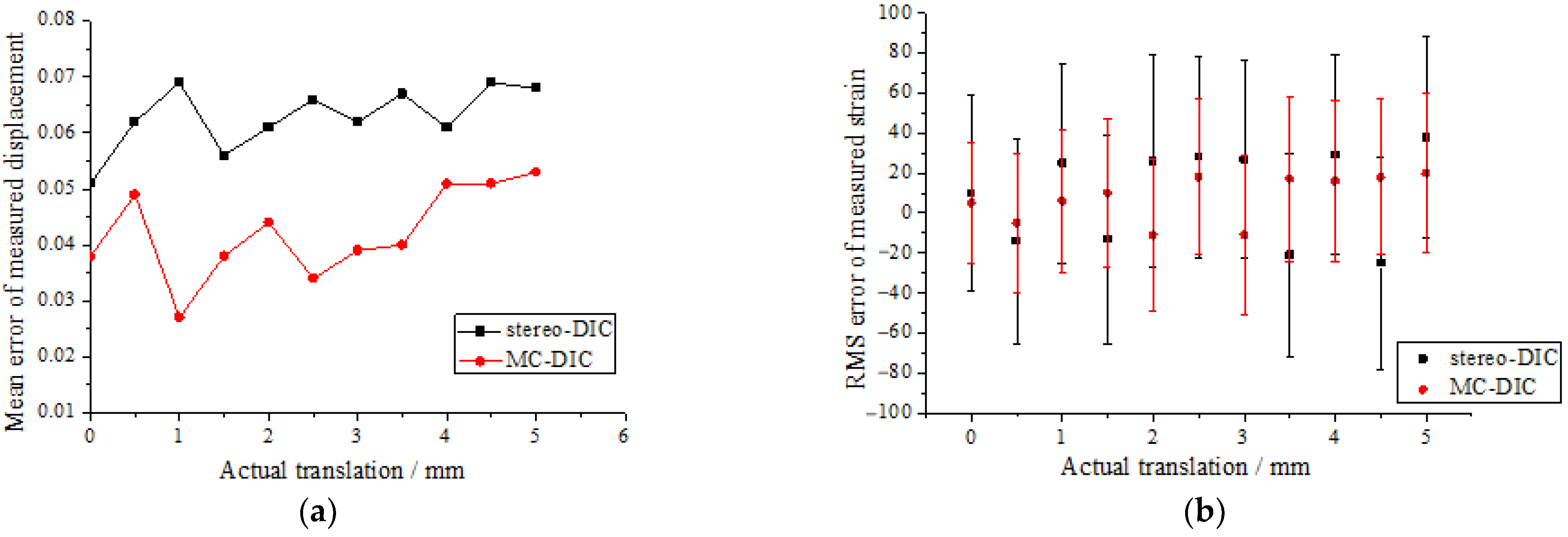
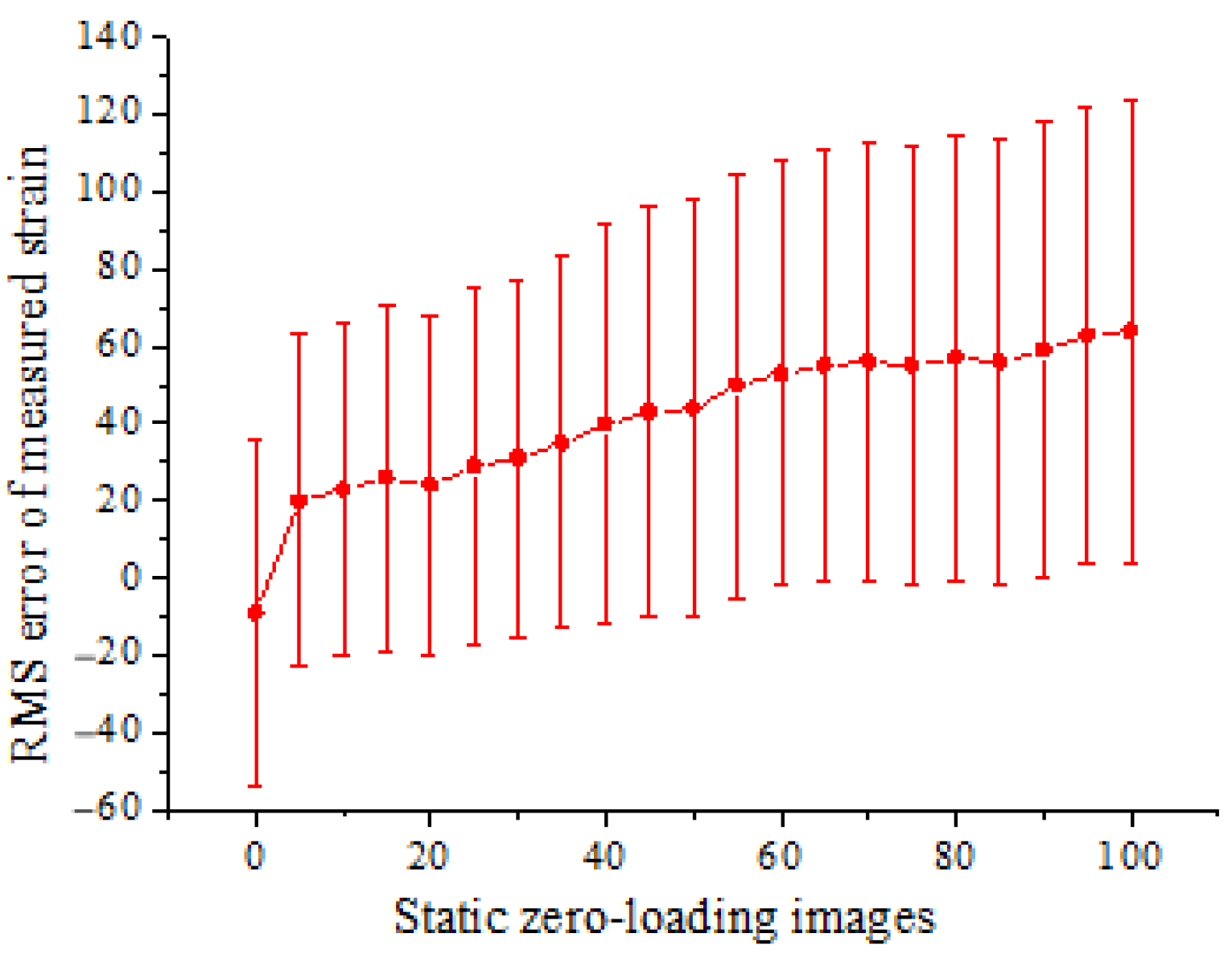
2.3. Measurement Uncertainty of MC-DIC Compared to Stereo-DIC with Dual Cameras
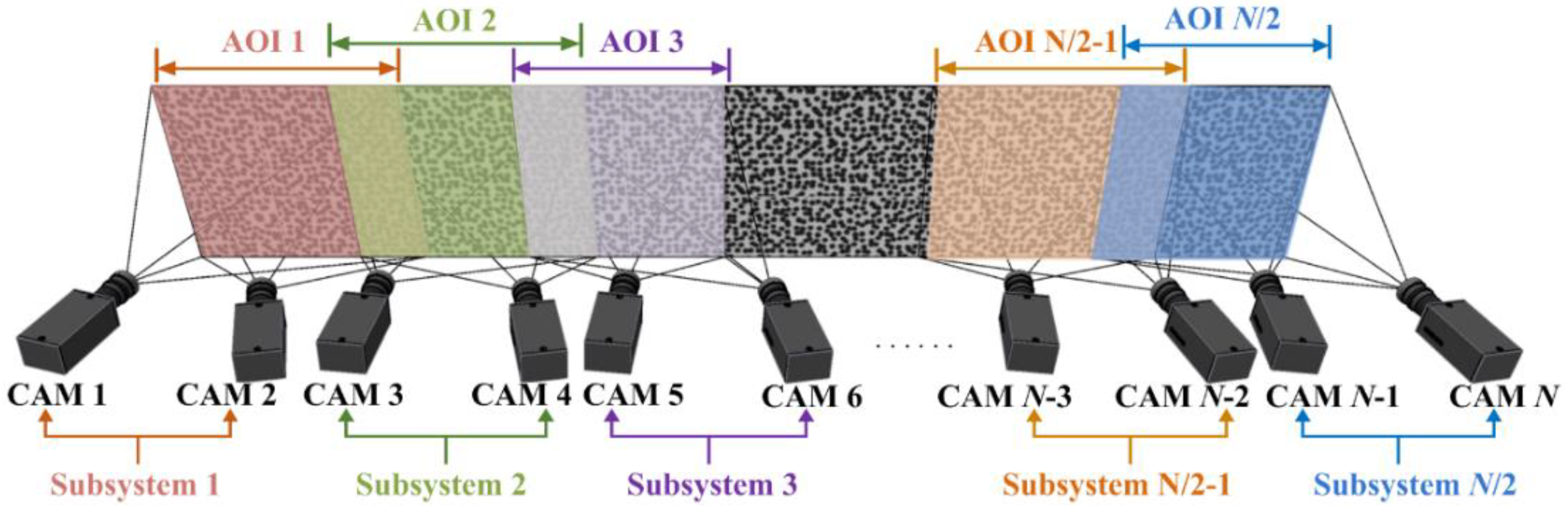
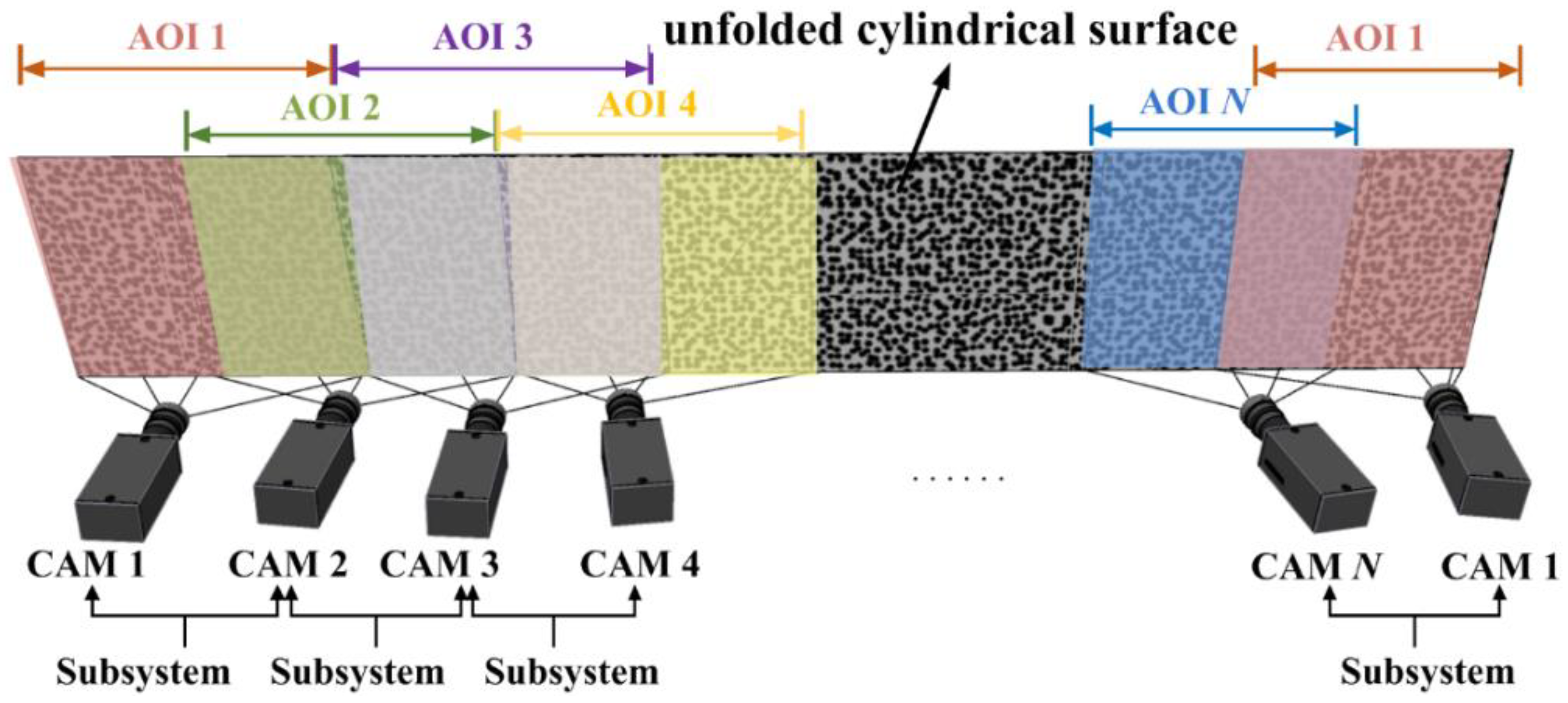
2.4. Camera Arrangements for Continuous-View MC-DIC
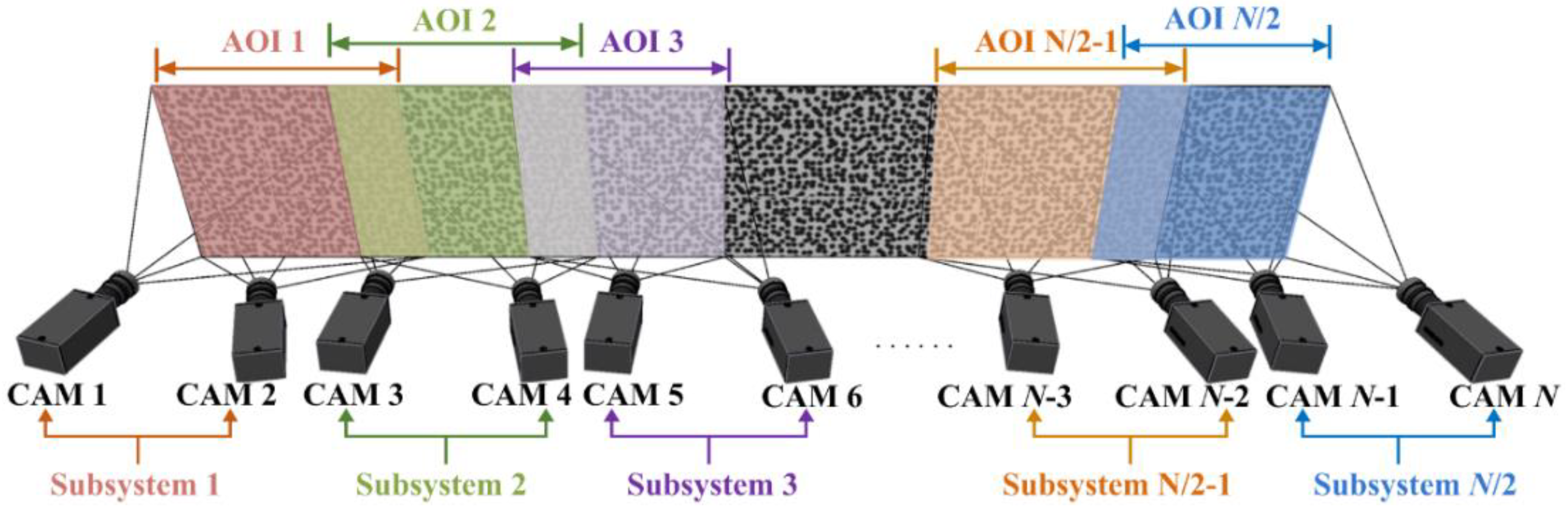
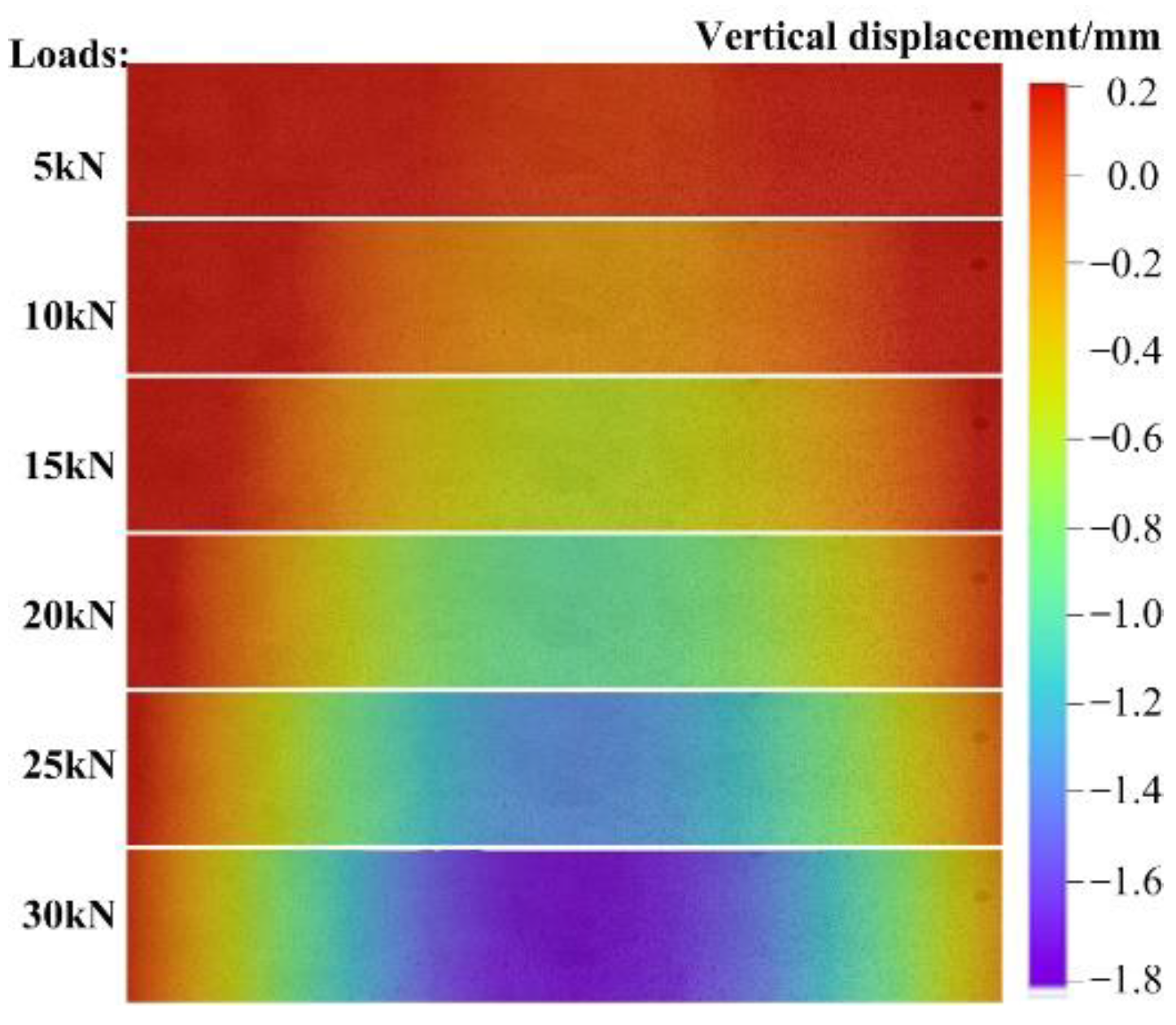
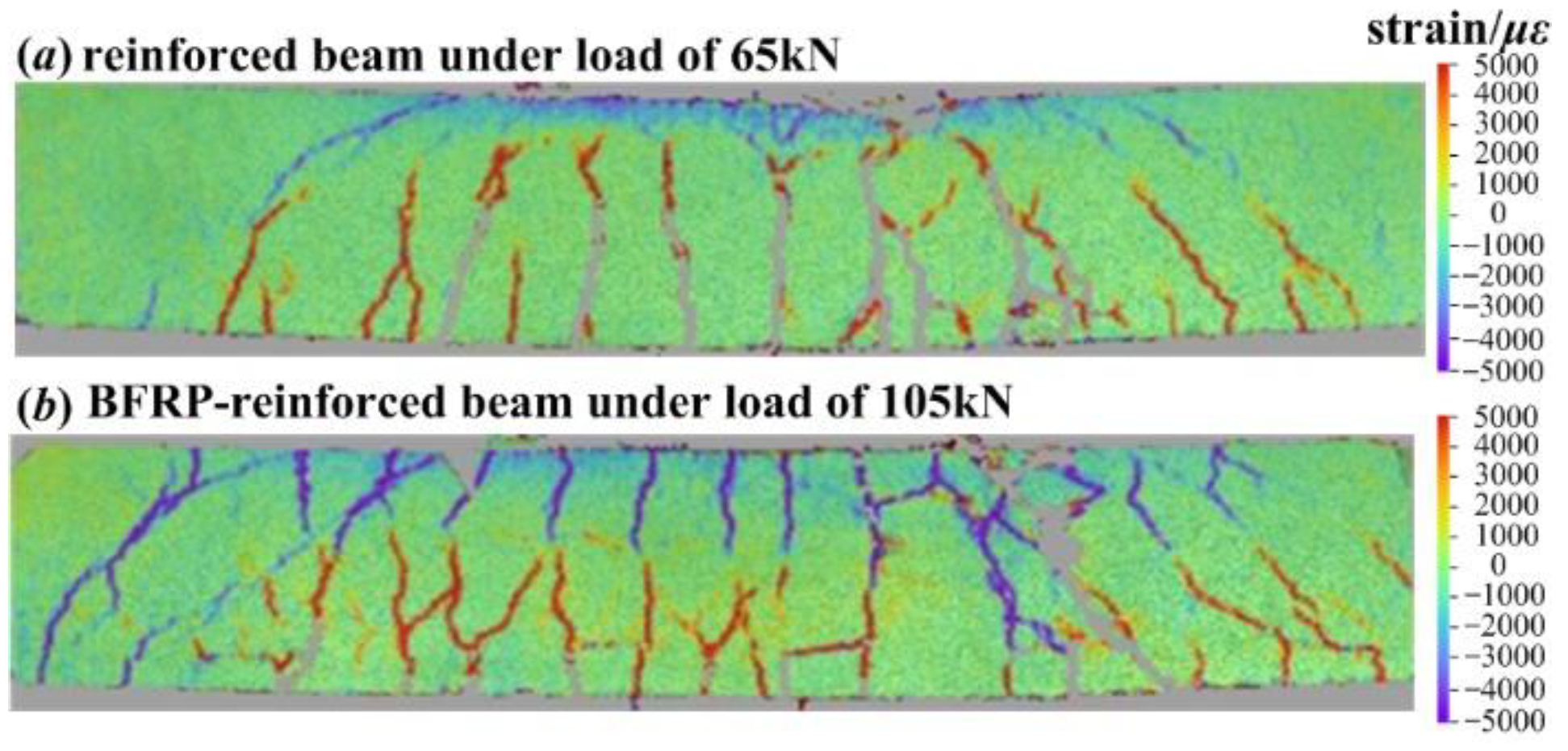
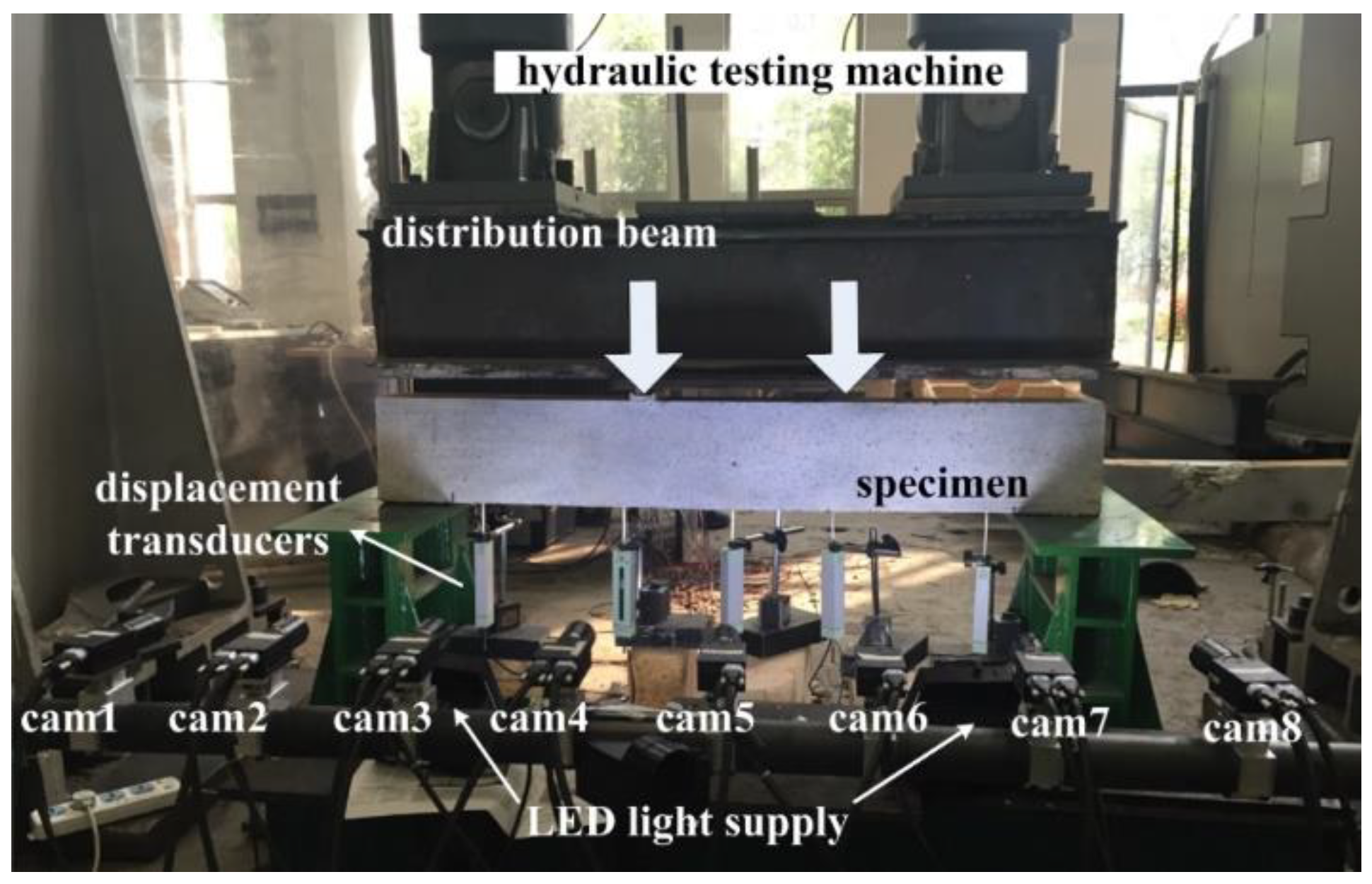
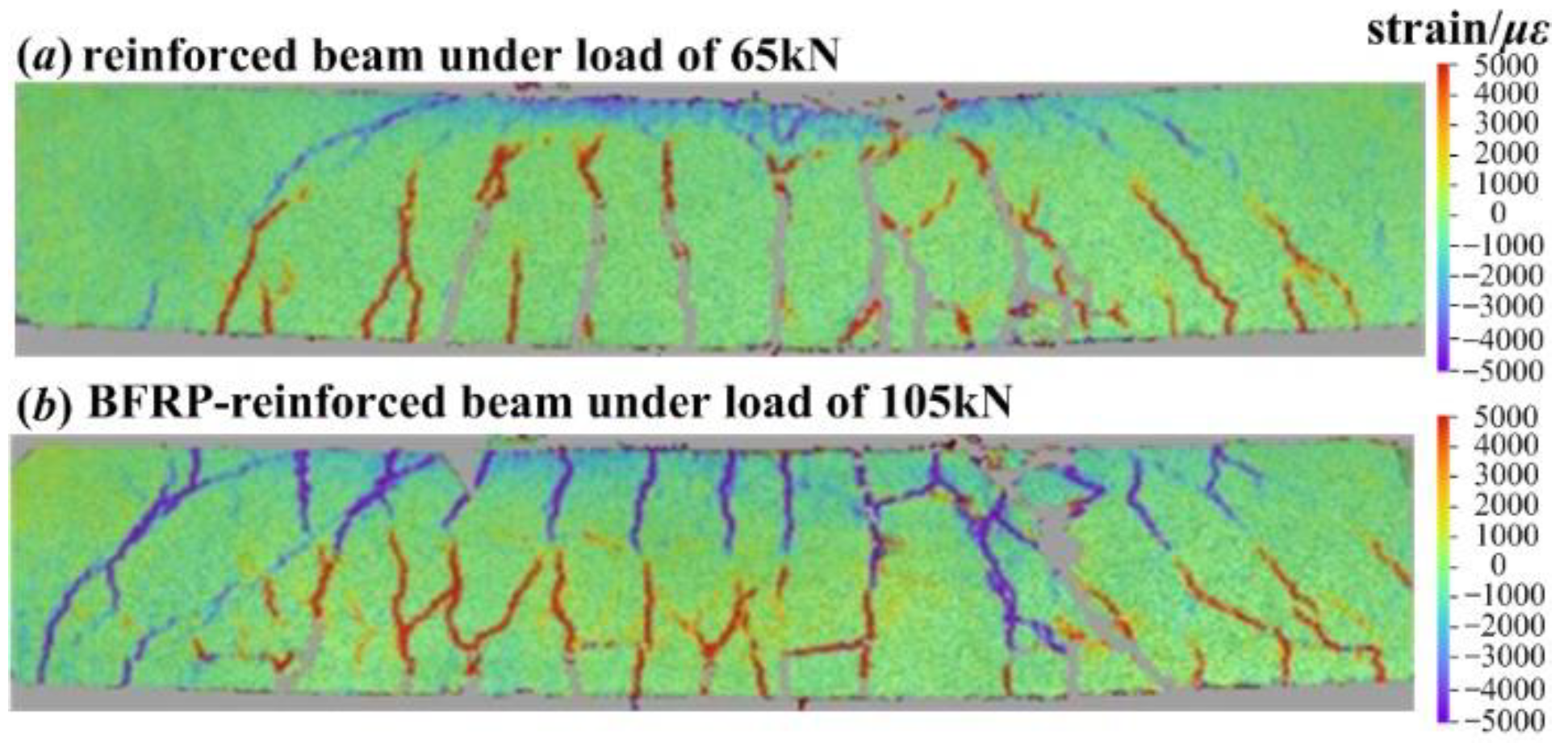
3. Bending Experiment of Coral Aggregate Concrete Beam
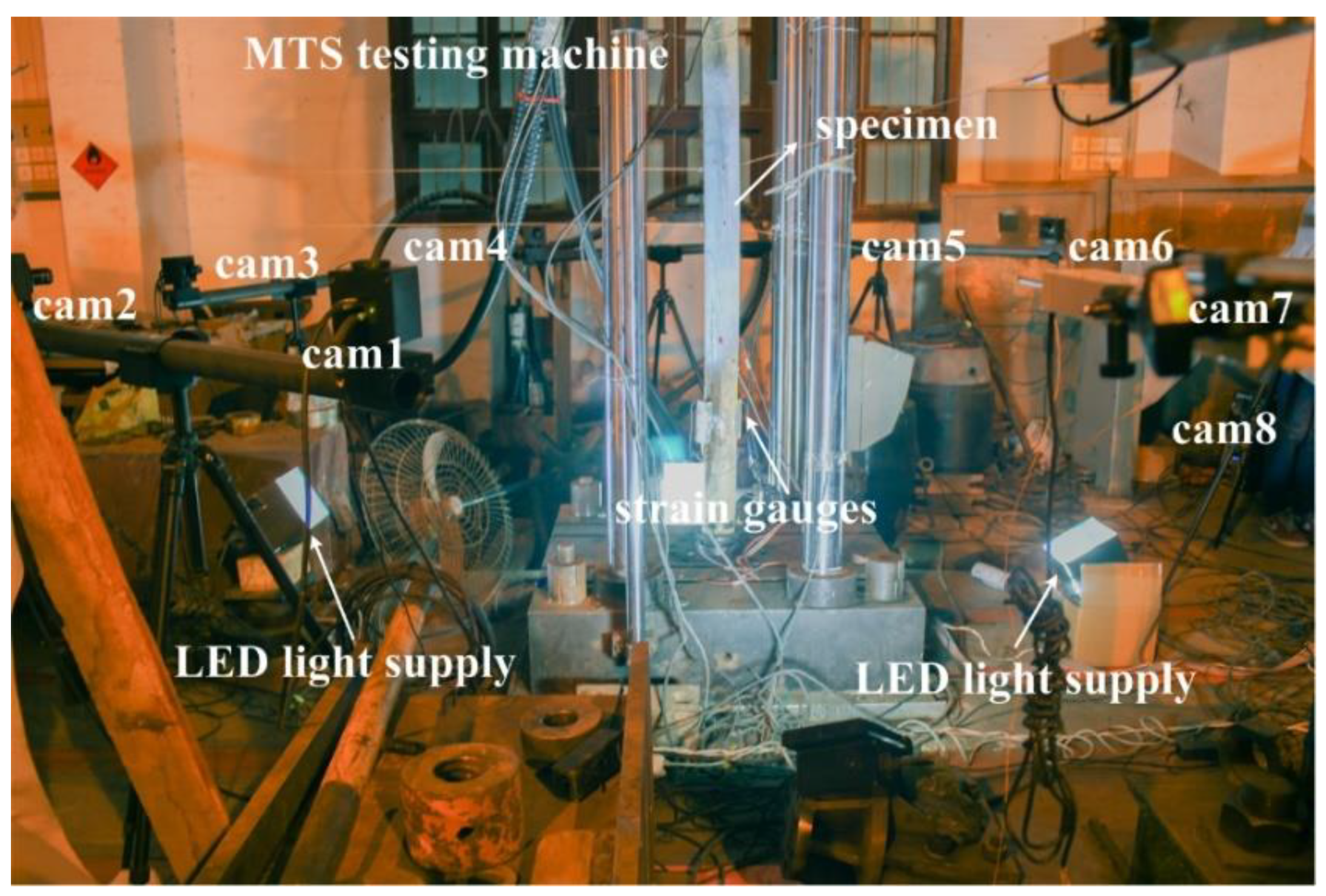
3.1. Experimental Program
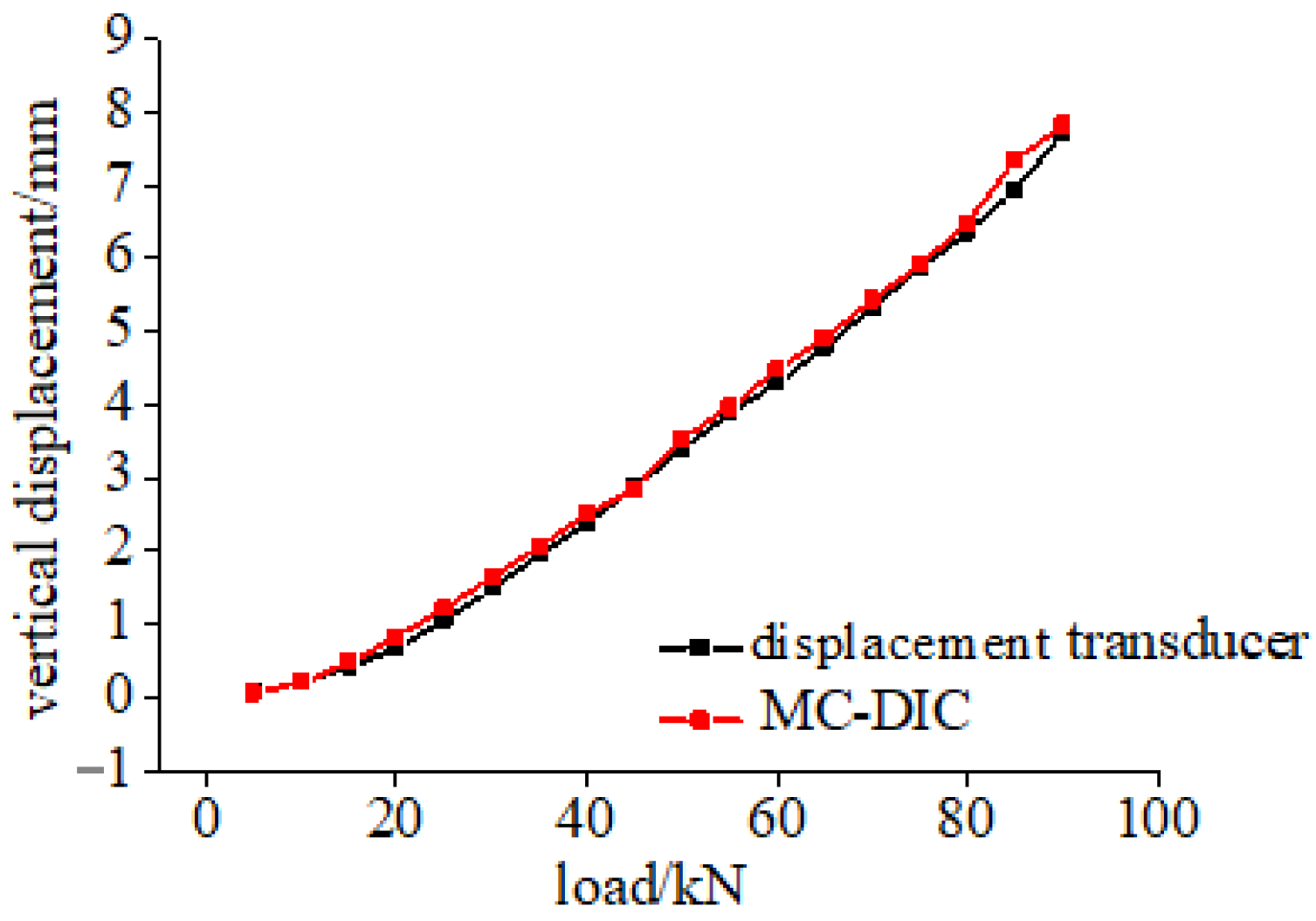
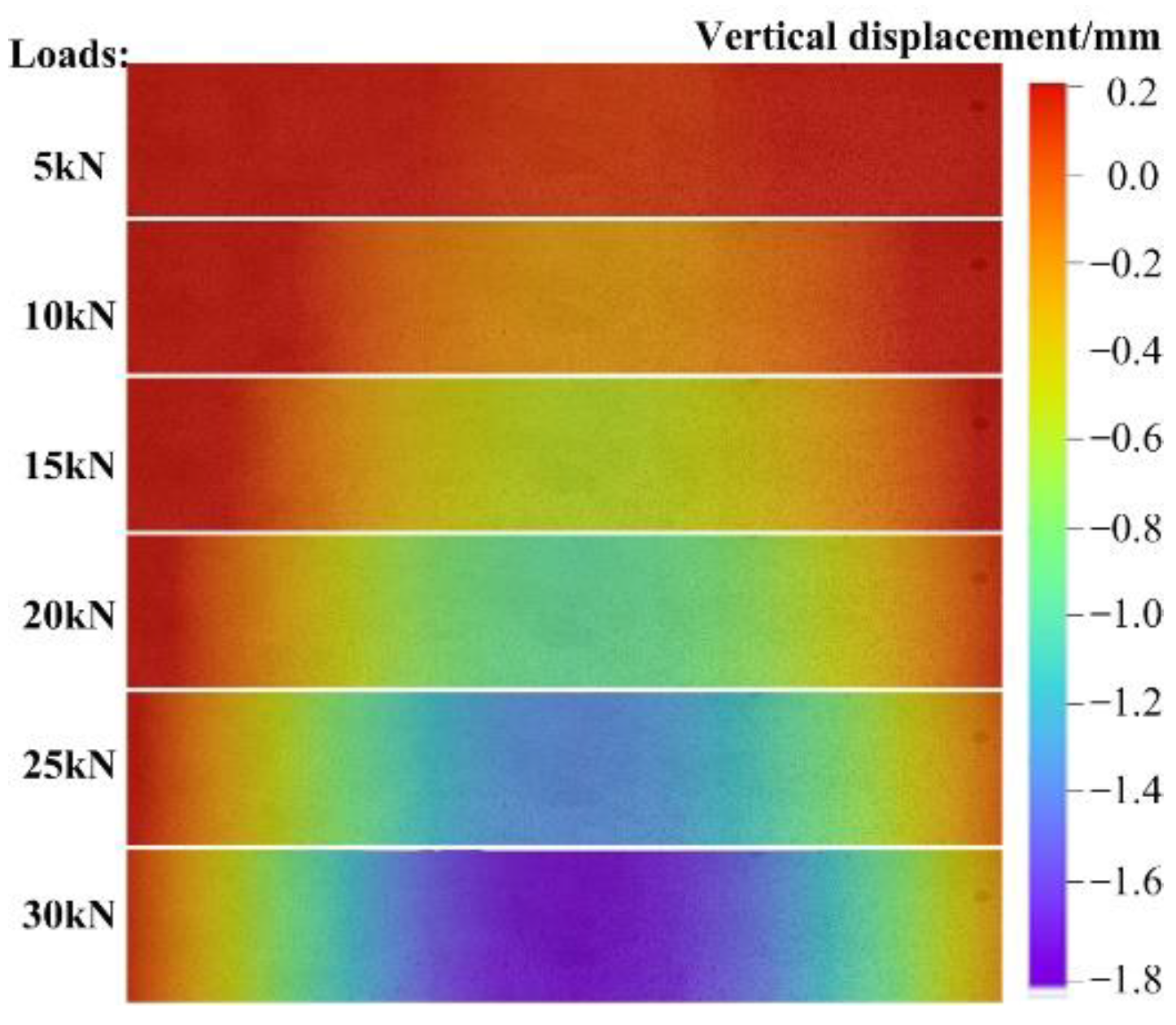
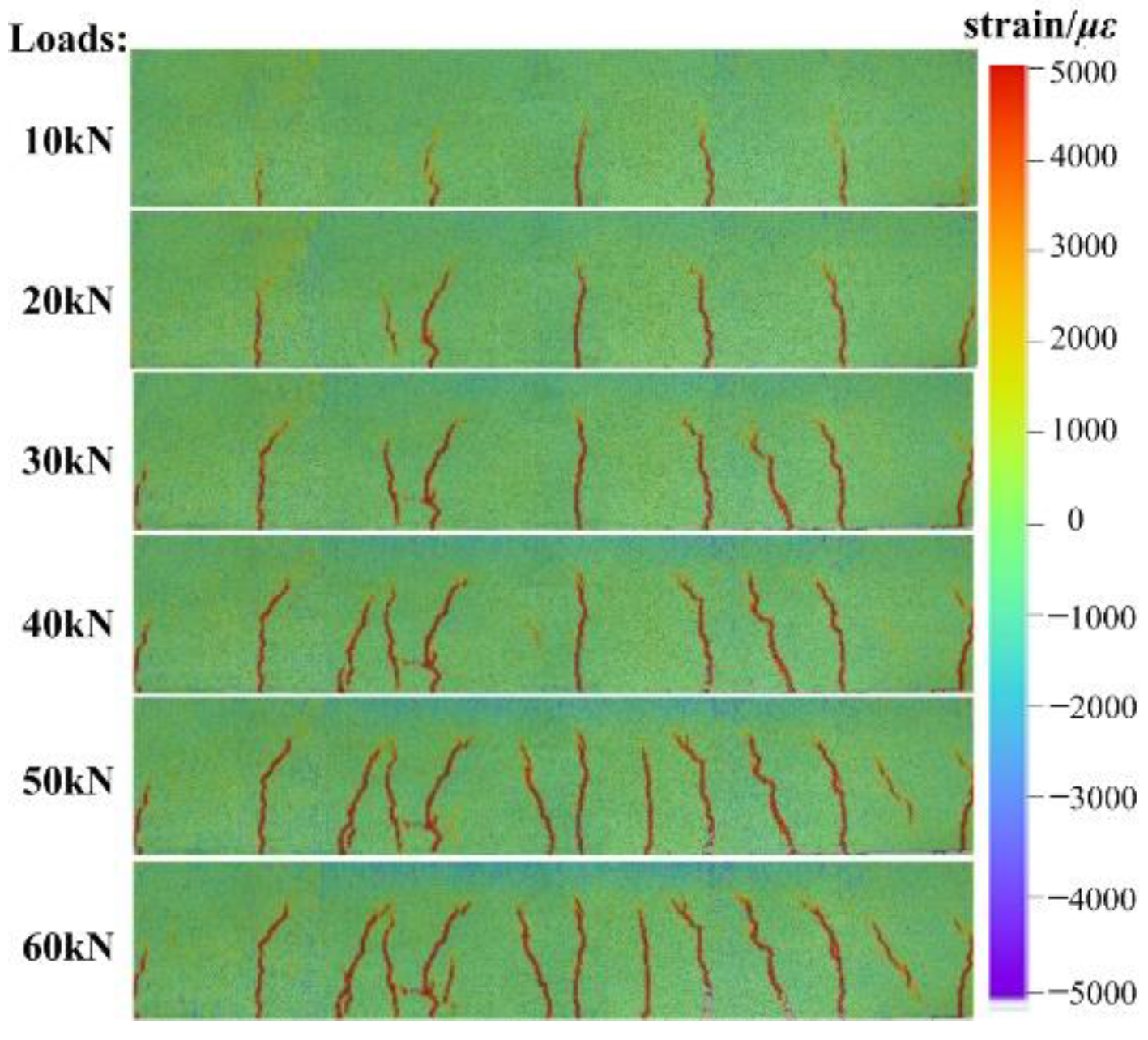
3.2. DIC Results and Discussion
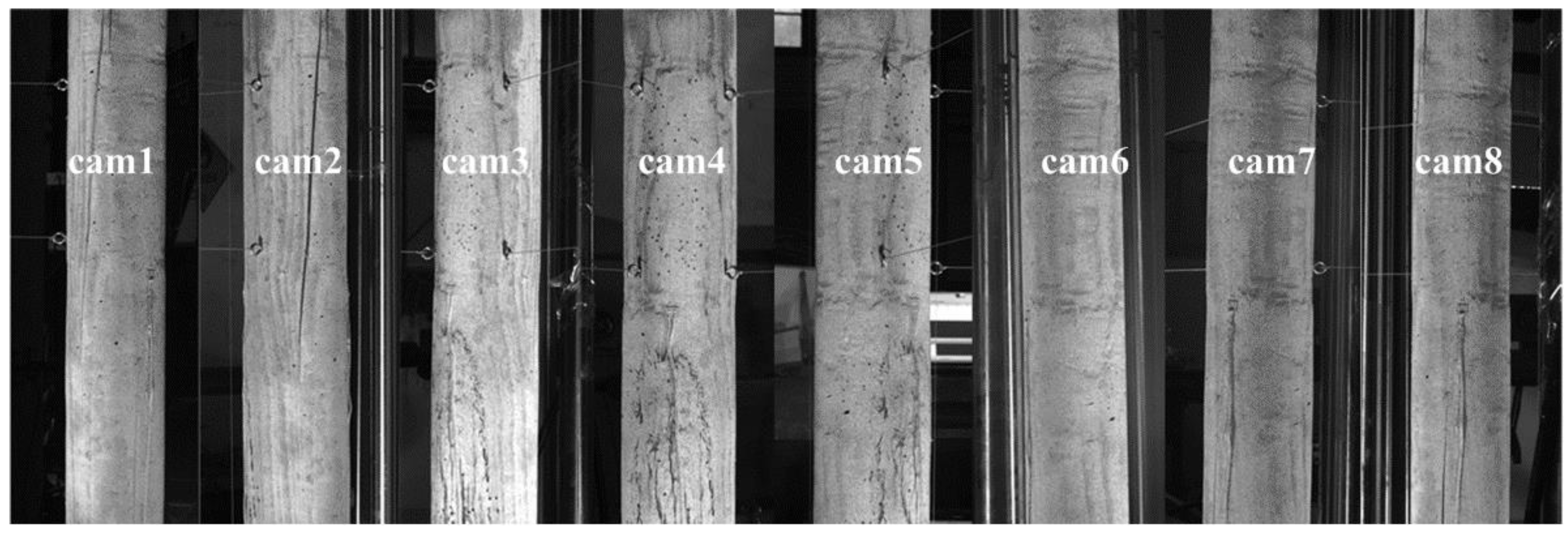
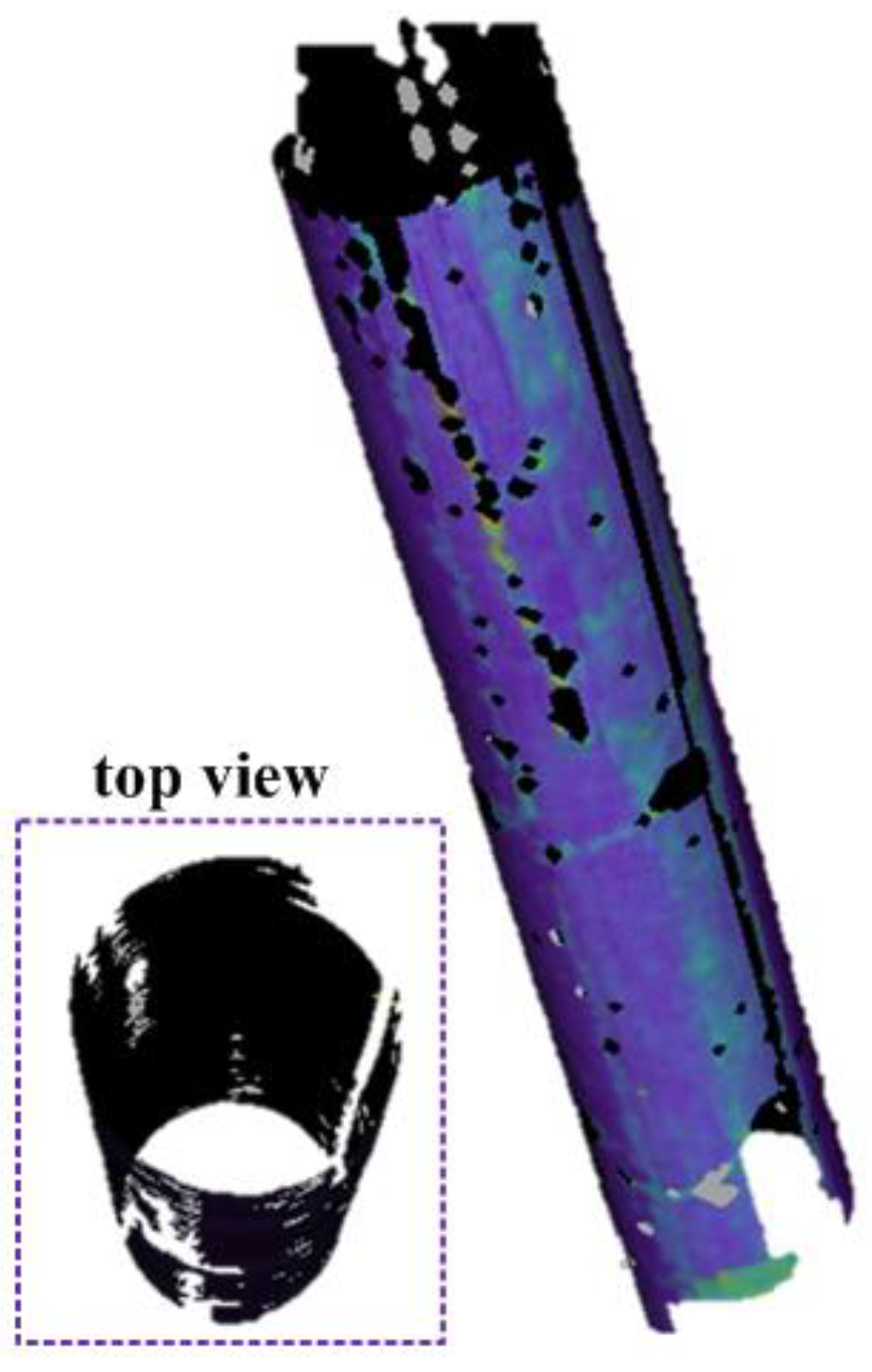
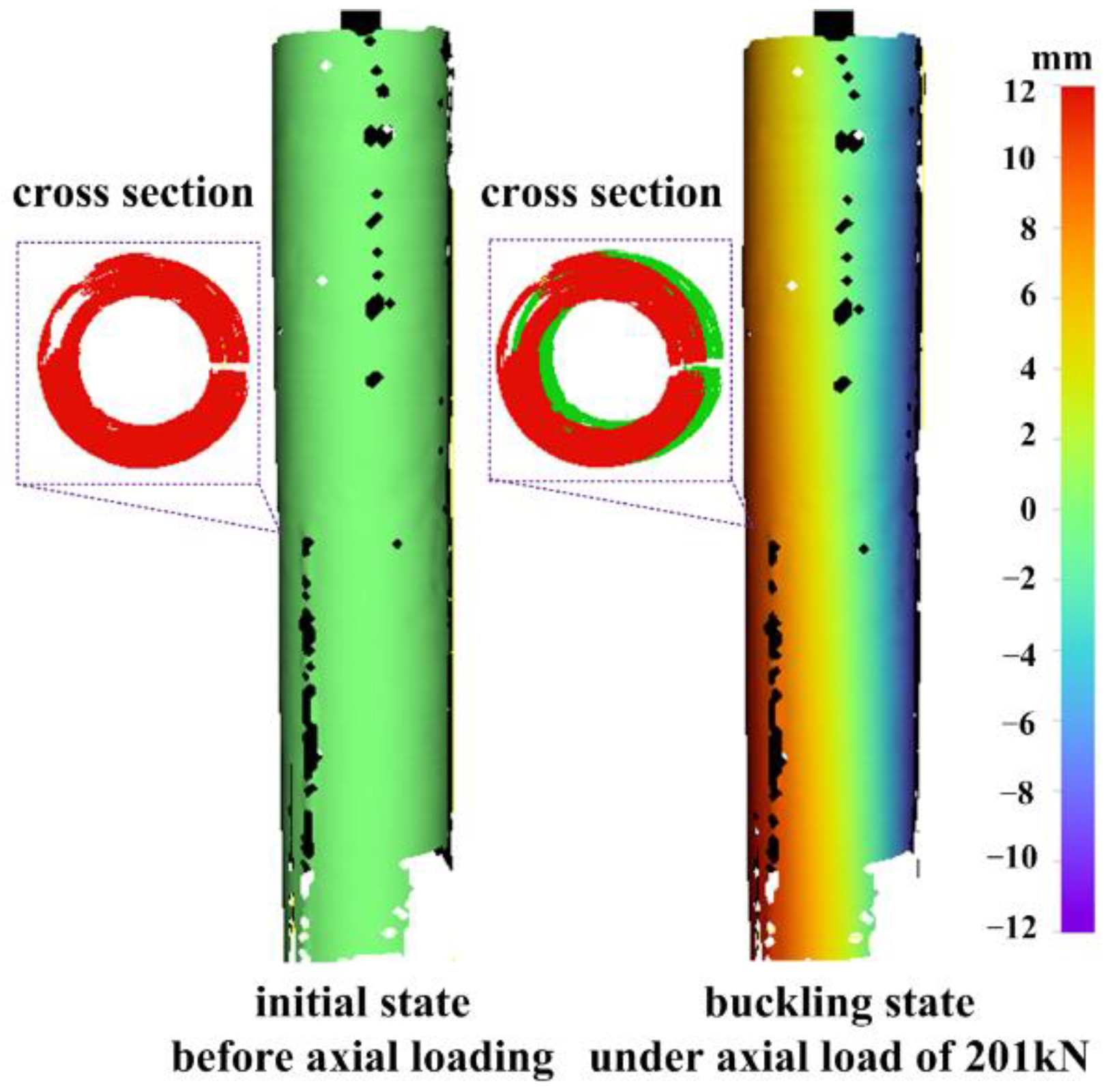
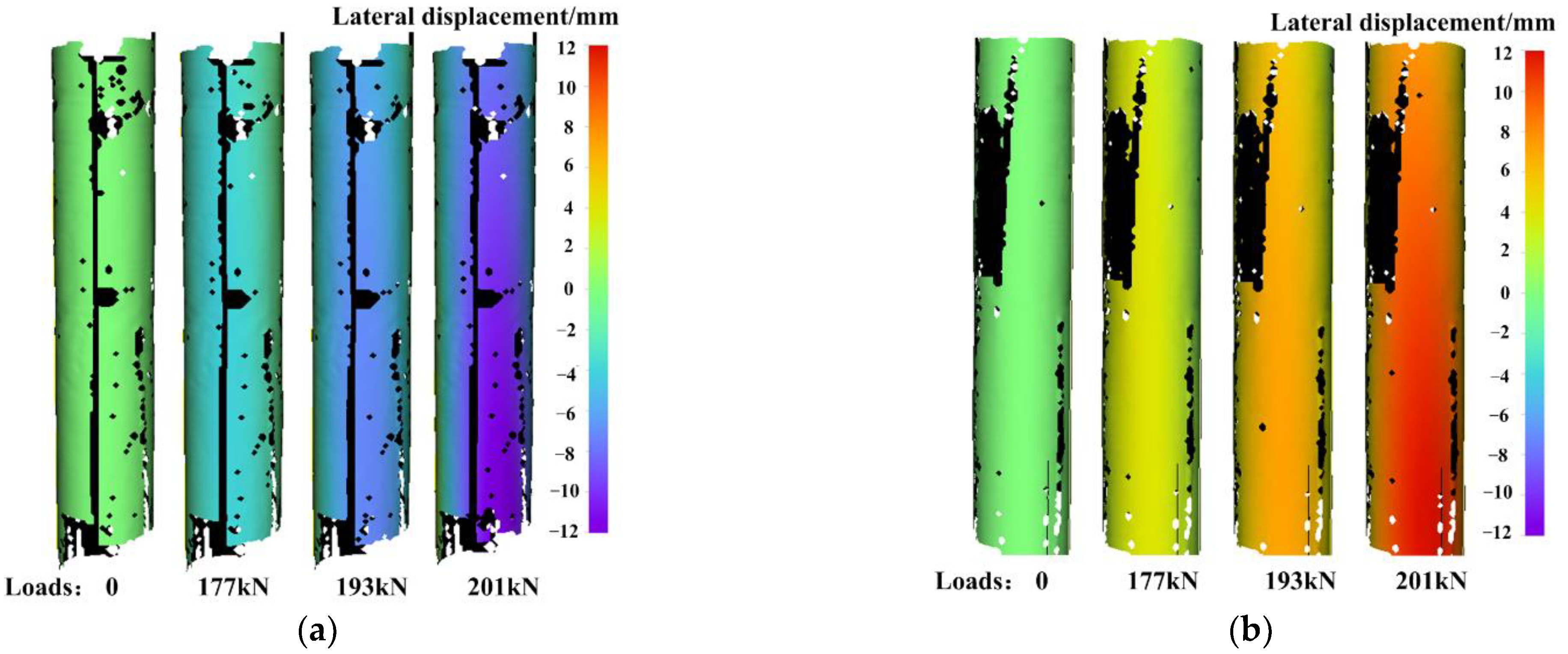
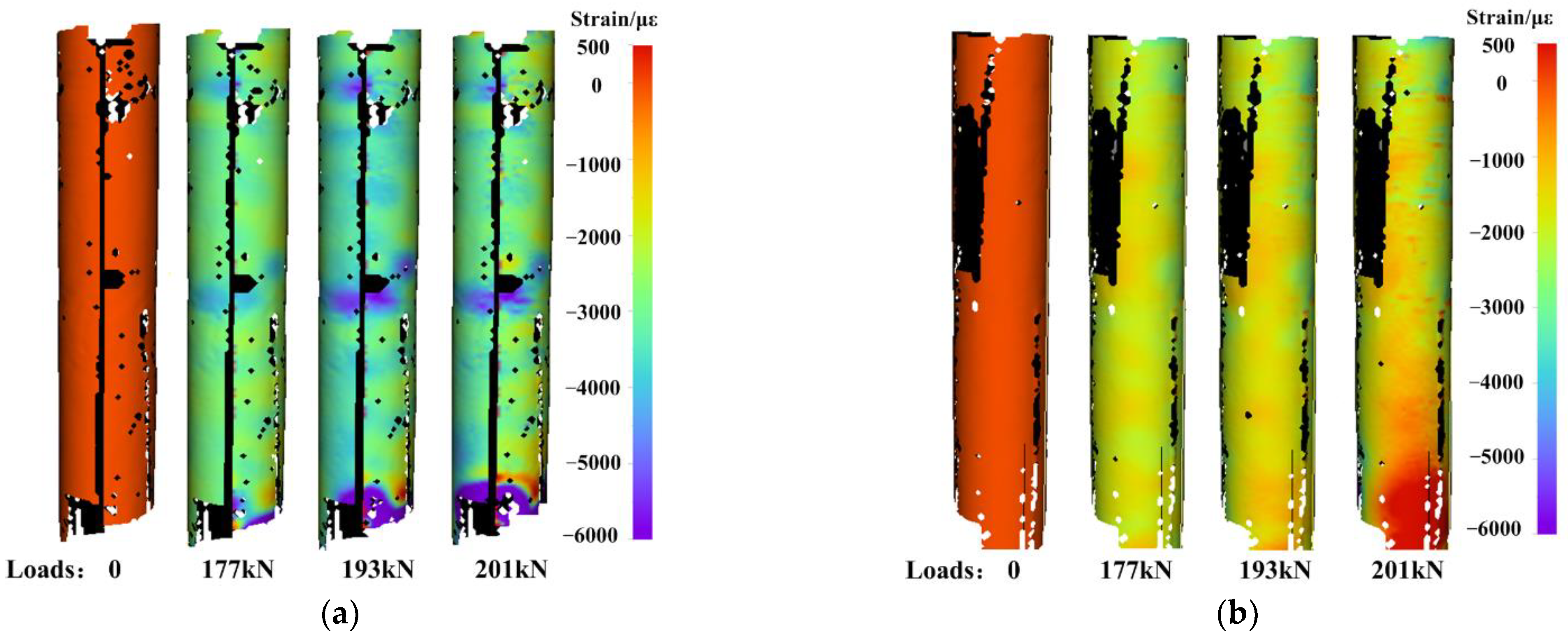
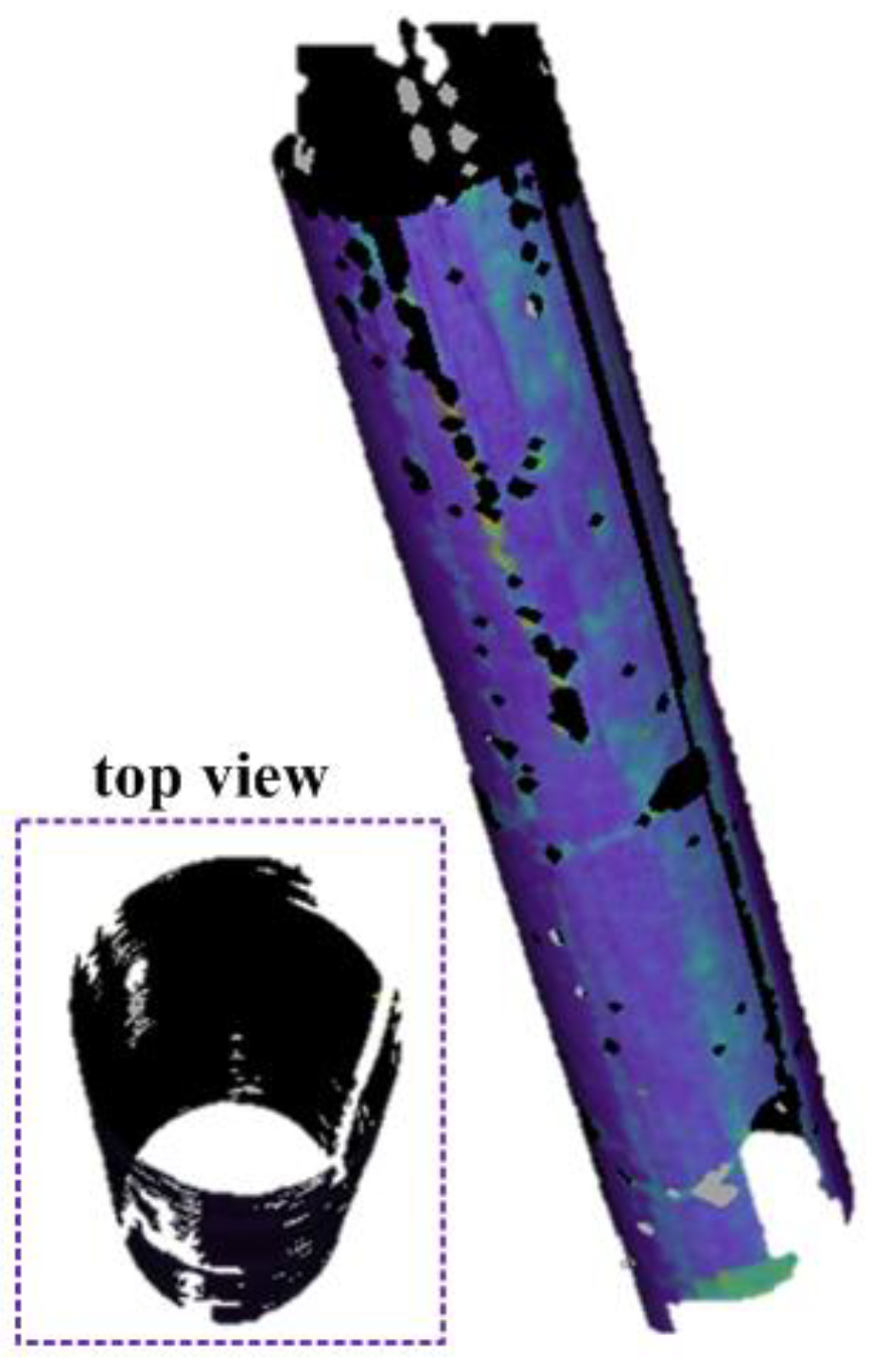
4. Axial Compression Experiment of Timber Column
4.1. Experimental Program
4.2. DIC Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peters, W.H.; Ranson, W.F. Digital imaging techniques in experimental stress analysis. Opt. Eng. 1982, 21, 427–431. [Google Scholar] [CrossRef]
- Sutton, M.A.; Wolters, W.J.; Peters, W.; Ranson, W.F.; Mcneill, S.R. Determination of displacements using an improved digital image correlation method. Image Vis. Comput. 1983, 1, 133–139. [Google Scholar] [CrossRef]
- Hartley, R.I.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Orteu, J.J. 3-D computer vision in experimental mechanics. Opt. Lasers Eng. 2009, 47, 282–291. [Google Scholar] [CrossRef]
- Sutton, M.A.; Orteu, J.J.; Schreier, H.W. Image Correlation for Shape, Motion and Deformation Measurements-Basic Concepts, Theory and Applications; Springer: Boston, MA, USA, 2009. [Google Scholar]
- Schreier, H.W.; Braasch, J.R.; Sutton, M.A. Systematic errors in digital image correlation caused by intensity interpolation. Opt. Eng. 2000, 39, 2915–2921. [Google Scholar] [CrossRef]
- Tong, W. An evaluation of digital image correlation criteria for strain mapping applications. Strain 2005, 41, 167–175. [Google Scholar] [CrossRef]
- Schreier, H.W.; Sutton, M.A. Systematic errors in digital image correlation due to undermatched subset shape functions. Exp. Mech. 2002, 42, 303–310. [Google Scholar] [CrossRef]
- Bruck, H.A.; McNeill, S.R.; Sutton, M.A.; Peters, W.H. Digital image correlation using Newton-Raphson method of partial differential correction. Exp. Mech. 1989, 29, 261–267. [Google Scholar] [CrossRef]
- Pan, B.; Li, K.; Tong, W. Fast, robust and accurate digital image correlation calculation without redundant computations. Exp. Mech. 2013, 53, 1277–1289. [Google Scholar] [CrossRef]
- Shao, X.; Dai, X.; He, X. Noise robustness and parallel computation of the inverse compositional Gauss Newton algorithm in digital image correlation. Opt. Lasers Eng. 2015, 71, 9–19. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, X.; Xu, X.; He, X. Optimized digital speckle patterns for digital image correlation by consideration of both accuracy and efficiency. Appl. Opt. 2018, 57, 884. [Google Scholar] [CrossRef]
- Verhulp, E.; Rietbergen, B.V.; Huiskes, R. A three-dimensional digital image correlation technique for strain measurements in microstructures. J. Biomech. 2004, 37, 1313–1320. [Google Scholar] [CrossRef] [PubMed]
- Helfrick, M.N.; Niezrecki, C.; Avitabile, P.; Schmidt, T. 3D digital image correlation methods for full-field vibration measurement. Mech. Syst. Signal Process. 2011, 25, 917–927. [Google Scholar] [CrossRef]
- Pan, B.; Wu, D.; Yu, L. Optimization of a three-dimensional digital image correlation system for deformation measurements in extreme environments. Appl. Opt. 2012, 51, 4409–4419. [Google Scholar] [CrossRef] [PubMed]
- Carroll, J.D.; Abuzaid, W.; Lambros, J.; Sehitoglu, H. High resolution digital image correlation measurements of strain accumulation in fatigue crack growth. Int. J. Fatigue 2013, 57, 140–150. [Google Scholar] [CrossRef]
- Yuan, X.; Teng, C.; Xu, X.; Gao, Z.; Zhang, Q. High-accuracy and real-time 3D positioning, tracking system for medical imaging applications based on 3D digital image correlation. Opt. Lasers Eng. 2017, 88, 82–90. [Google Scholar]
- Cunha, F.G.; Santos, T.G. In situ monitoring of additive manufacturing using digital image correlation: A review. Materials 2021, 14, 1511. [Google Scholar] [CrossRef] [PubMed]
- Ghahari, S.A. Application of digital image correlation in structural health monitoring of bridge infrastructures: A review. Infrastructures 2021, 6, 176. [Google Scholar]
- Janeliukstis, R.; Chen, X. Review of digital image correlation application to large-scale composite structure testing. Compos. Struct. 2021, 271, 114143. [Google Scholar] [CrossRef]
- Orteu, J.J.; Bugarin, F.; Harvent, J.; Robert, L.; Velay, V. Multiple-camera instrumentation of a single point incremental forming process pilot for shape and 3D displacement measurements: Methodology and results. Exp. Mech. 2011, 51, 625–639. [Google Scholar] [CrossRef]
- Harvent, J.; Bugarin, F.; Orteu, J.-J.; Devy, M.; Barbeau, P.; Marin, G. Inspection of aeronautics parts for shape detect detection using a multi-camera system. In Proceedings of the XIth International Congress and Exposition, Orlando, FL, USA, 2–5 June 2008. [Google Scholar]
- Siebert, T.; Splitthof, K.; Lomnitz, M. Continuous development of 3D DIC by using multi camera approach. In Advancement of Optical Methods in Experimental Mechanics; Springer: Cham, Switzerland, 2016; pp. 203–209. [Google Scholar]
- Malesa, M.; Kujawinska, M.; Malowany, K.; Lusa, T. Application of multi-camera DIC system for measurements of industrial structures. Procedia Eng. 2015, 114, 453–460. [Google Scholar] [CrossRef]
- Malesa, M.; Malowany, K.; Pawlicki, J.; Kujawinska, M.; Skrzypczak, P.; Piekarczuk, A.; Lusa, T.; Zagorski, A. Non-destructive testing of industrial structures with the use of multi-camera digital image correlation method. Eng. Fail. Anal. 2016, 69, 122–134. [Google Scholar] [CrossRef]
- Malowany, K.; Malesa, M.; Kowaluk, T.; Kujawinska, M. Multi-camera digital image correlation method with distributed fields of view. Opt. Lasers Eng. 2017, 98, 198–204. [Google Scholar] [CrossRef]
- Dong, S.; Shao, X.; Kang, X.; Yang, F.; He, X. Extrinsic calibration of a non-overlapping camera network based on close-range photogrammetry. Appl. Opt. 2016, 55, 6363–6370. [Google Scholar] [CrossRef]
- Dong, S.; Yu, S.; Huang, Z.; Song, S.; Shao, X.; Kang, X.; He, X. Target-based calibration method for multifields of view measurement using multiple stereo digital image correlation systems. Opt. Eng. 2017, 56, 124102. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, C.; Dai, Y.; Ding, L.; He, X. Full-circle monitoring and stability study of BFRP concrete columns. Eng. Mech. 2015, 32, 147–153. (In Chinese) [Google Scholar]
- Zhao, T.; Le, V.T.; Goo, N.S. Global-local deformation measurement of stress concentration structures using a multi-digital image correlation system. J. Mech. Sci. Technol. 2020, 34, 1655–1665. [Google Scholar] [CrossRef]
- Wang, Y.; Lava, P.; Coppieters, S.; Houtte, P.V.; Debruyne, D. Application of a multi-camera stereo DIC set-up to assess strain fields in an Erichsen test: Methodology and validation. Strain 2013, 49, 190–198. [Google Scholar] [CrossRef]
- Chen, F.; Chen, X.; Xie, X.; Feng, X.; Yang, L. Full-field 3D measurement using multi-camera digital image correlation system. Opt. Lasers Eng. 2013, 51, 1044–1052. [Google Scholar] [CrossRef]
- Chen, X.; Yang, L.; Xu, N.; Xie, X.; Sia, B.; Xu, R. Cluster approach based multi-camera digital image correlation: Methodology and its application in large area high temperature measurement. Opt. Laser Technol. 2014, 57, 318–326. [Google Scholar] [CrossRef]
- Hwang, C.; Wang, W.; Chen, Y. Camera calibration and 3D surface reconstruction for multi-camera semi-circular DIC system. In Proceedings of the International Conference on Optics in Precision Engineering & Nanotechnology, Singapore, 22 June 2013; SPIE Proceedings: Bellingham, WA, USA, 2013; p. 8769. [Google Scholar]
- Johanson, K.; Harper, L.T.; Johnson, M.S.; Warrior, N.A. Heterogeneity of discontinuous carbon fibre composites: Damage initiation captured by digital image correlation. Compos. Part A Appl. Sci. Manuf. 2015, 68, 304–312. [Google Scholar] [CrossRef]
- Li, J.; Xie, X.; Yang, G.; Zhang, B.; Siebert, T.; Yang, L. Whole-field thickness strain measurement using multiple camera digital image correlation system. Opt. Lasers Eng. 2017, 90, 19–25. [Google Scholar] [CrossRef]
- Li, J.; Yang, G.; Siebert, T.; Shi, M.F.; Yang, L. A method of the direct measurement of the true stress–strain curve over a large strain range using multi-camera digital image correlation. Opt. Lasers Eng. 2018, 107, 194–201. [Google Scholar] [CrossRef]
- Poozesh, P.; Baqersad, J.; Niezrecki, C.; Avitabile, P.; Harvey, E.; Yarala, R. Large-area photogrammetry based testing of wind turbine blades. Mech. Syst. Signal Process. 2017, 86, 98–115. [Google Scholar] [CrossRef] [Green Version]
- Poozesh, P.; Baqersad, J.; Niezrecki, C.; Avitabile, P. A multi-camera stereo DIC system for extracting operating mode shapes of large scale structures. In Advancement of Optical Methods in Experimental Mechanics, Volume 3. Conference Proceedings of the Society for Experimental Mechanics Series; Jin, H., Yoshida, S., Lamberti, L., Lin, M.T., Eds.; Springer: Cham, Switzerland, 2016; pp. 225–238. [Google Scholar]
- Gardner, N.W.; Hilburger, M.W.; Haynie, W.T.; Lindell, M.C.; Waters, W.A. Digital image correlation data processing and analysis techniques to enhance test data assessment and improve structural simulations. In Proceedings of the AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Solav, D.; Moerman, K.M.; Jaeger, A.M.; Herr, H.M. A framework for measuring the time-varying shape and full-field deformation of residual limbs using 3-D digital image correlation. IEEE Trans. Biomed. Eng. 2019, 66, 2740–2752. [Google Scholar] [CrossRef]
- Tong, Z.; Shao, X.; Chen, Z.; He, X. Optimization of the forearm angle for arm wrestling using multi-camera stereo digital image correlation: A preliminary study. Theor. Appl. Mech. Lett. 2021, 11, 100287. [Google Scholar] [CrossRef]
- Wei, K.; Yuan, F.; Shao, X.; Chen, Z.; Wu, G.; He, X. High-speed multi-camera 3D DIC measurement of the deformation of cassette structure with large shaking table. Mech. Syst. Signal Process. 2022, 177, 109273. [Google Scholar] [CrossRef]
- Pan, B.; Xie, H.; Guo, Z.; Hua, T. Full-field strain measurement using a two-dimensional Savitzky-Golay digital differentiator in digital image correlation. Opt. Eng. 2007, 46, 033601. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle adjustment—A modern synthesis. In International Workshop on Vision Algorithms; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Yang, W. Design and evaluation of an ultrahigh-strength coral aggregate concrete for maritime and reef engineering. Materials 2021, 14, 5871. [Google Scholar]
- Shi, J.; Zhu, H.; Wu, Z.; Seracino, R.; Wu, G. Bond behavior between basalt fiber–reinforced polymer sheet and concrete substrate under the coupled effects of freeze-thaw cycling and sustained load. J. Compos. Constr. 2013, 17, 530–542. [Google Scholar] [CrossRef]
- Li, Y.; Yin, S.; Lu, Y.; Hu, C. Experimental investigation of the mechanical properties of BFRP bars in coral concrete under high temperature and humidity. Constr. Build. Mater. 2020, 259, 120591. [Google Scholar] [CrossRef]
- Li, H.; Qiu, H.; Zhao, Z.; Lu, Y. Axial compression behaviour of retrofitted long timber columns. Adv. Struct. Eng. 2018, 21, 445–459. [Google Scholar] [CrossRef]
- Li, H.; Dai, Y.; Qiu, H.; He, X. Application of multi-camera digital Image correlation in the stability study of the long timber column with the circular cross-section under axial compression. BioResources 2022, 17, 1717–1728. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Y.; Li, H. Multi-Camera Digital Image Correlation in Deformation Measurement of Civil Components with Large Slenderness Ratio and Large Curvature. Materials 2022, 15, 6281. https://doi.org/10.3390/ma15186281
Dai Y, Li H. Multi-Camera Digital Image Correlation in Deformation Measurement of Civil Components with Large Slenderness Ratio and Large Curvature. Materials. 2022; 15(18):6281. https://doi.org/10.3390/ma15186281
Chicago/Turabian StyleDai, Yuntong, and Hongmin Li. 2022. "Multi-Camera Digital Image Correlation in Deformation Measurement of Civil Components with Large Slenderness Ratio and Large Curvature" Materials 15, no. 18: 6281. https://doi.org/10.3390/ma15186281
APA StyleDai, Y., & Li, H. (2022). Multi-Camera Digital Image Correlation in Deformation Measurement of Civil Components with Large Slenderness Ratio and Large Curvature. Materials, 15(18), 6281. https://doi.org/10.3390/ma15186281