
Modeling and Stability Analysis of Distributed Secondary Control Scheme for Stand-Alone DC Microgrid Applications




Abstract
:1. Introduction
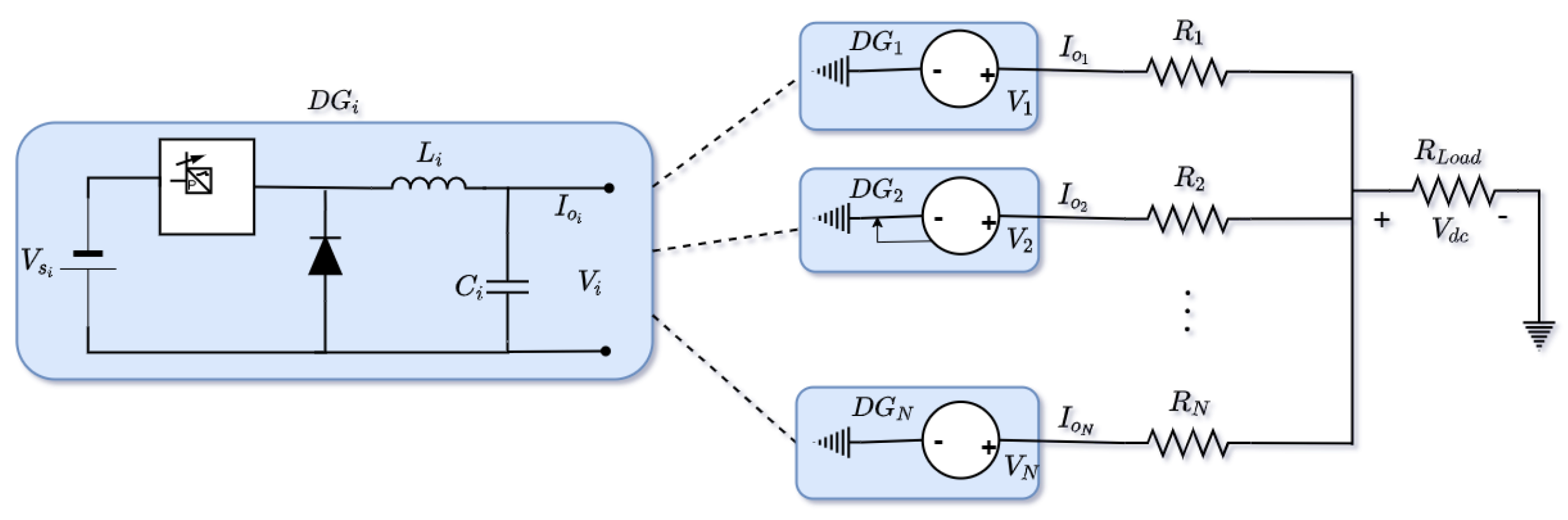
2. Mathematical Modeling of DC Microgrid
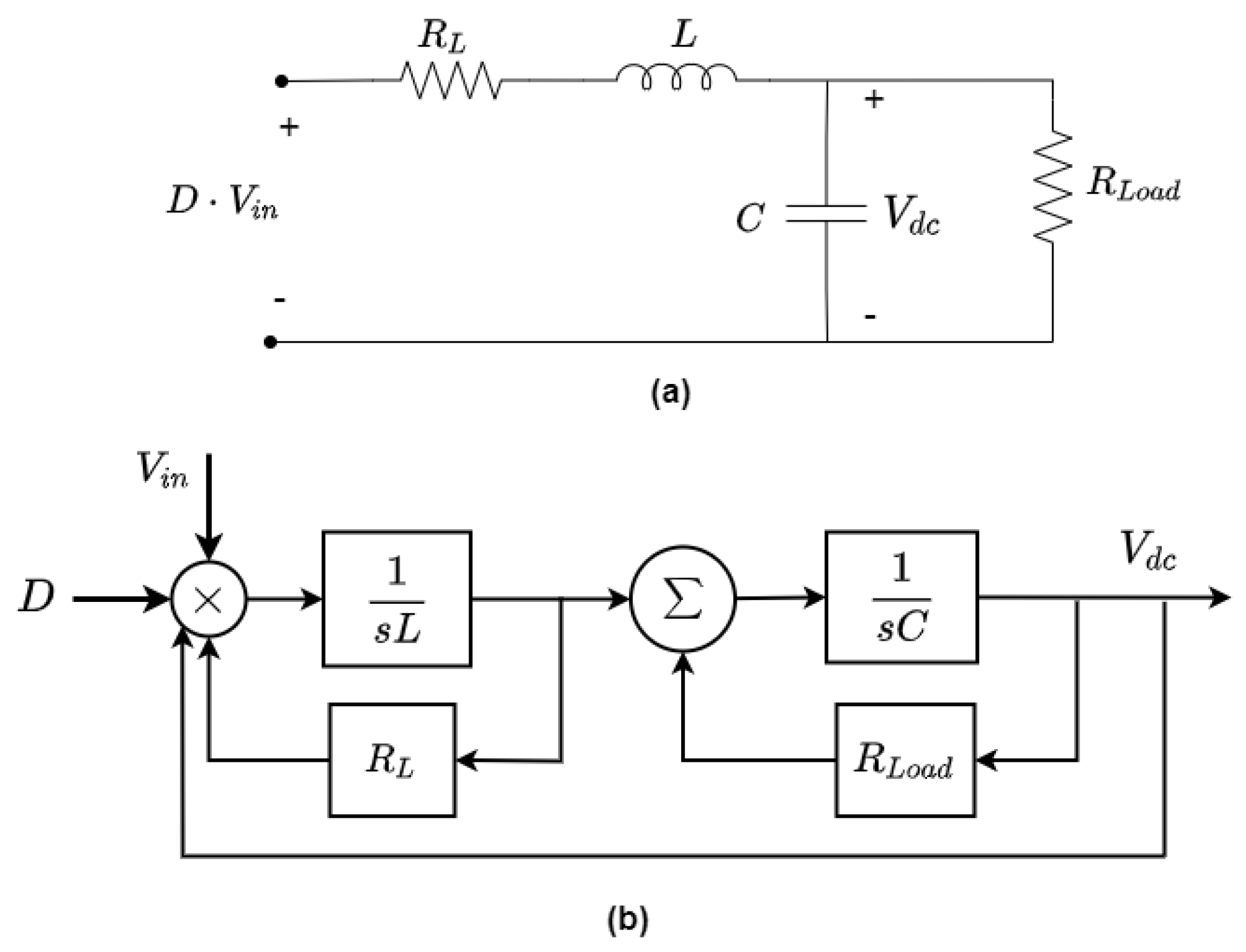
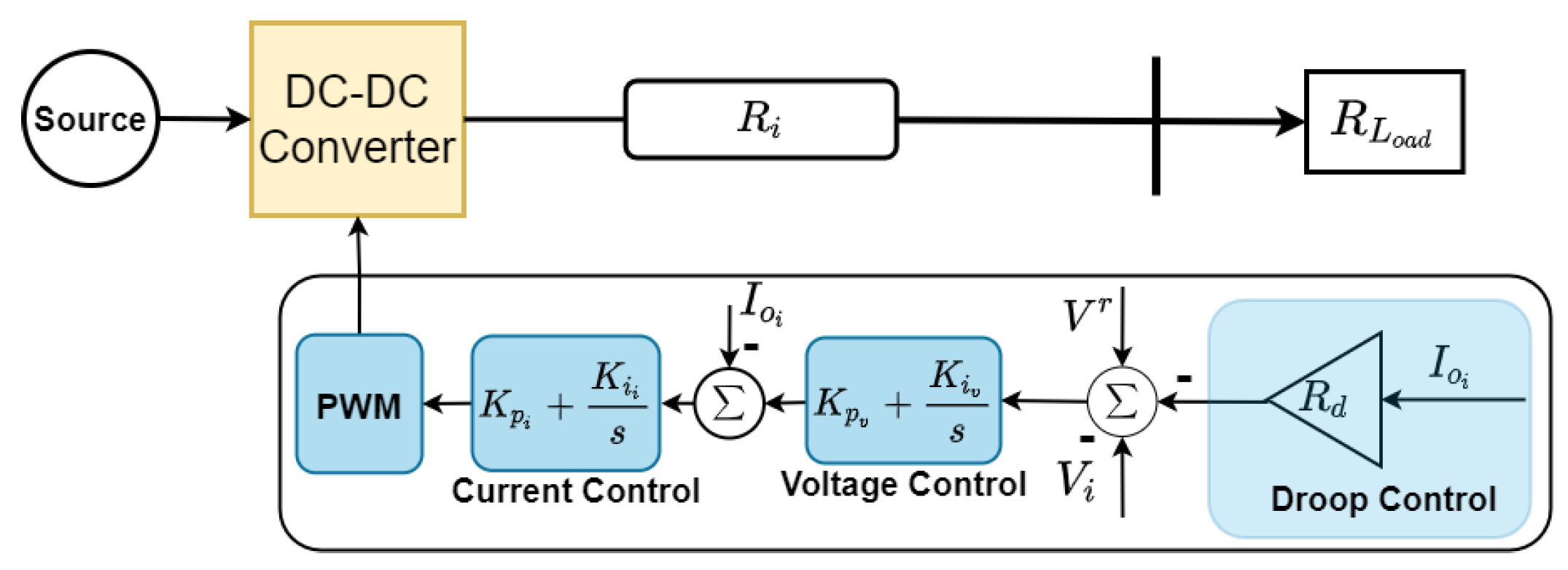
2.1. Buck Converter Modeling
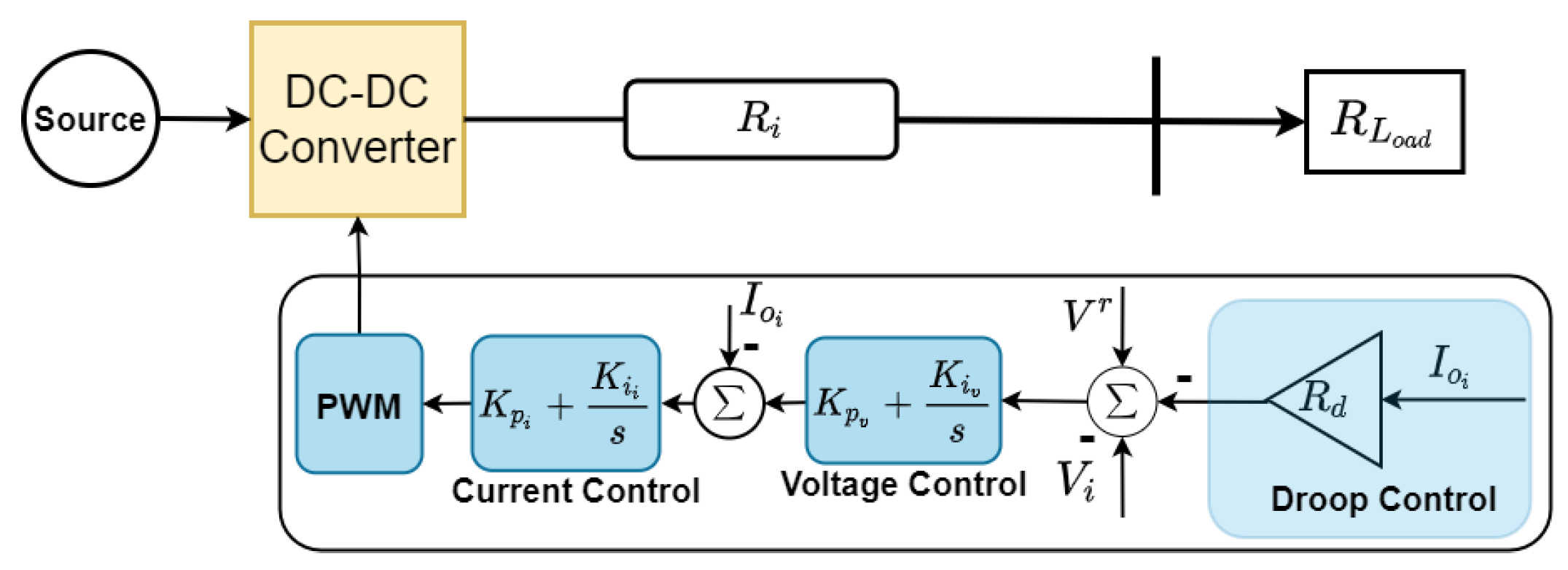
2.2. Primary Control of a Buck Converter
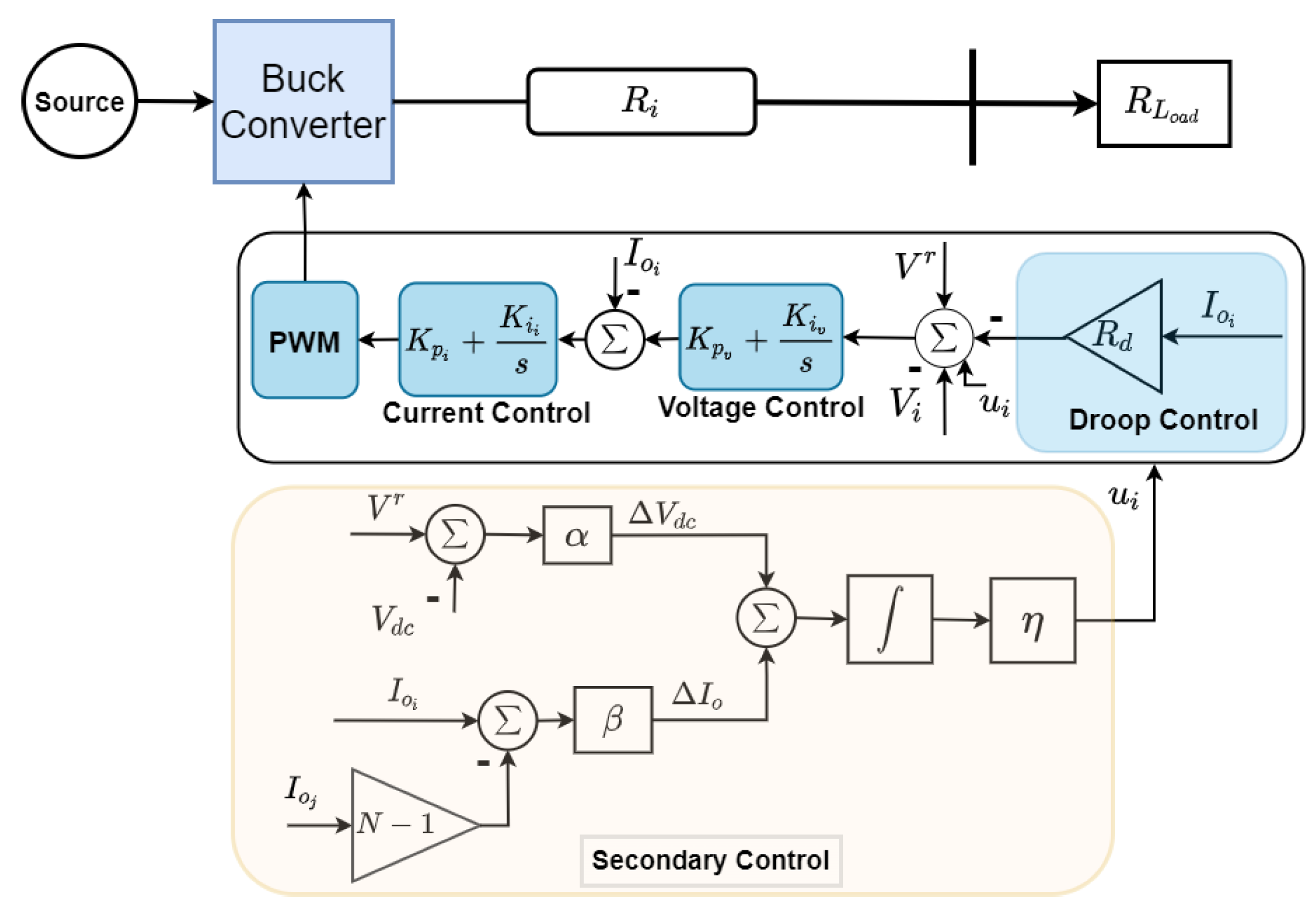
3. Proposed Distributed Secondary Control Scheme
3.1. Control Objectives
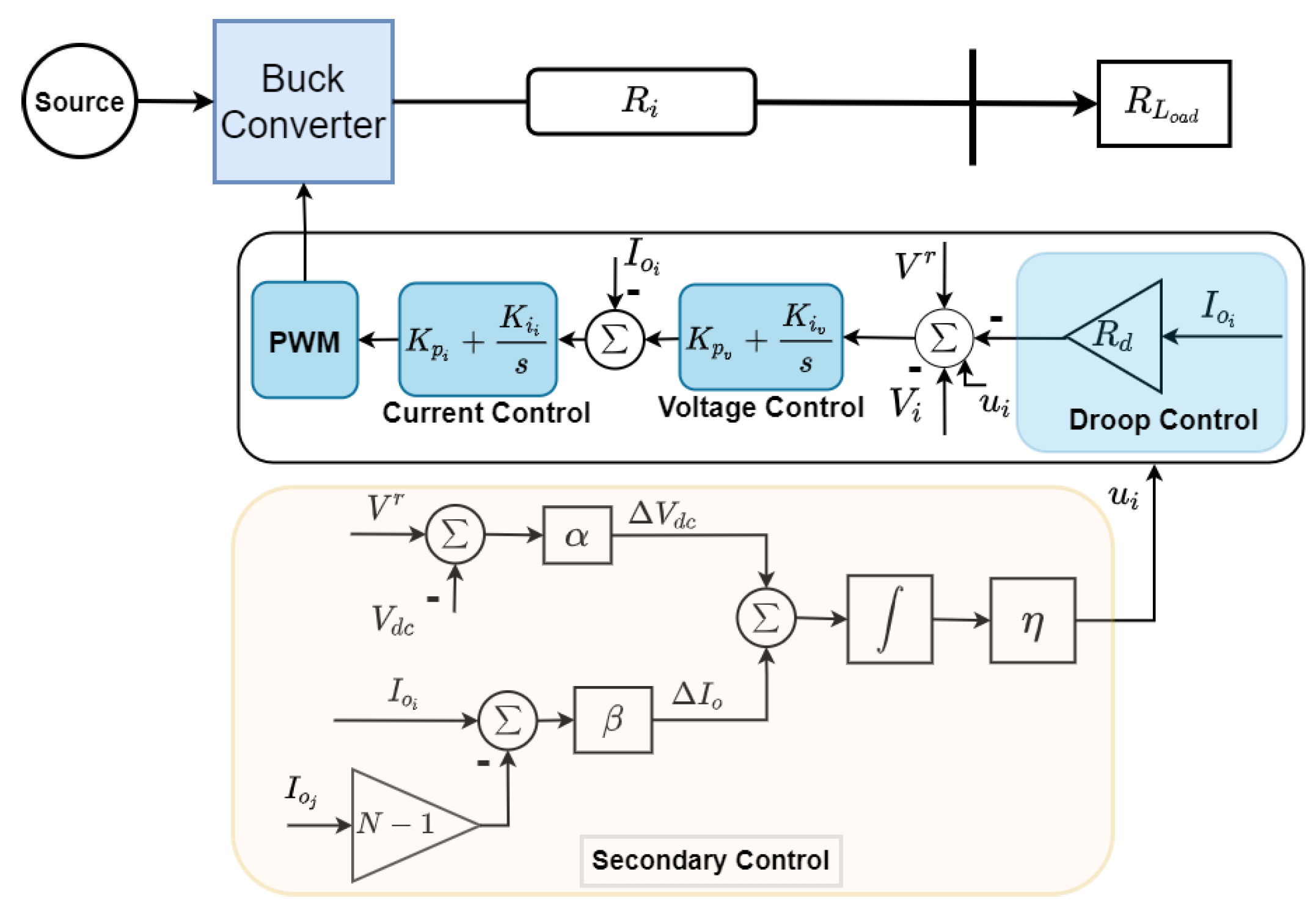
3.2. Proposed Controller Design
4. Proposed Tuning Method for Distributed Secondary Control
4.1. Traditional ABC Algorithm
- (1)
- Collector bees—they explore for possible NLs and share these locations by dancing with other bees in the colony. The length of the dance indicates the quality of nectar in the location. The collector bee with a high-quality nectar location will dance longer than one with a low-quality nectar location.
- (2)
- Observer bees—they wait in the hive to receive NLs from the collector bees and search for these NLs by using the greedy selection process. The NLs with high quality are likely to attract more observer bees than NLs with low quality.
- (3)
- Scout bees—they are formerly collector bees whose NLs were abandoned as a result of low quality.
4.2. Flight-Based ABC Algorithm
| Algorithm 1: Algorithm to implement flight-based ABC optimization |
|
5. Simulation Results and Discussion
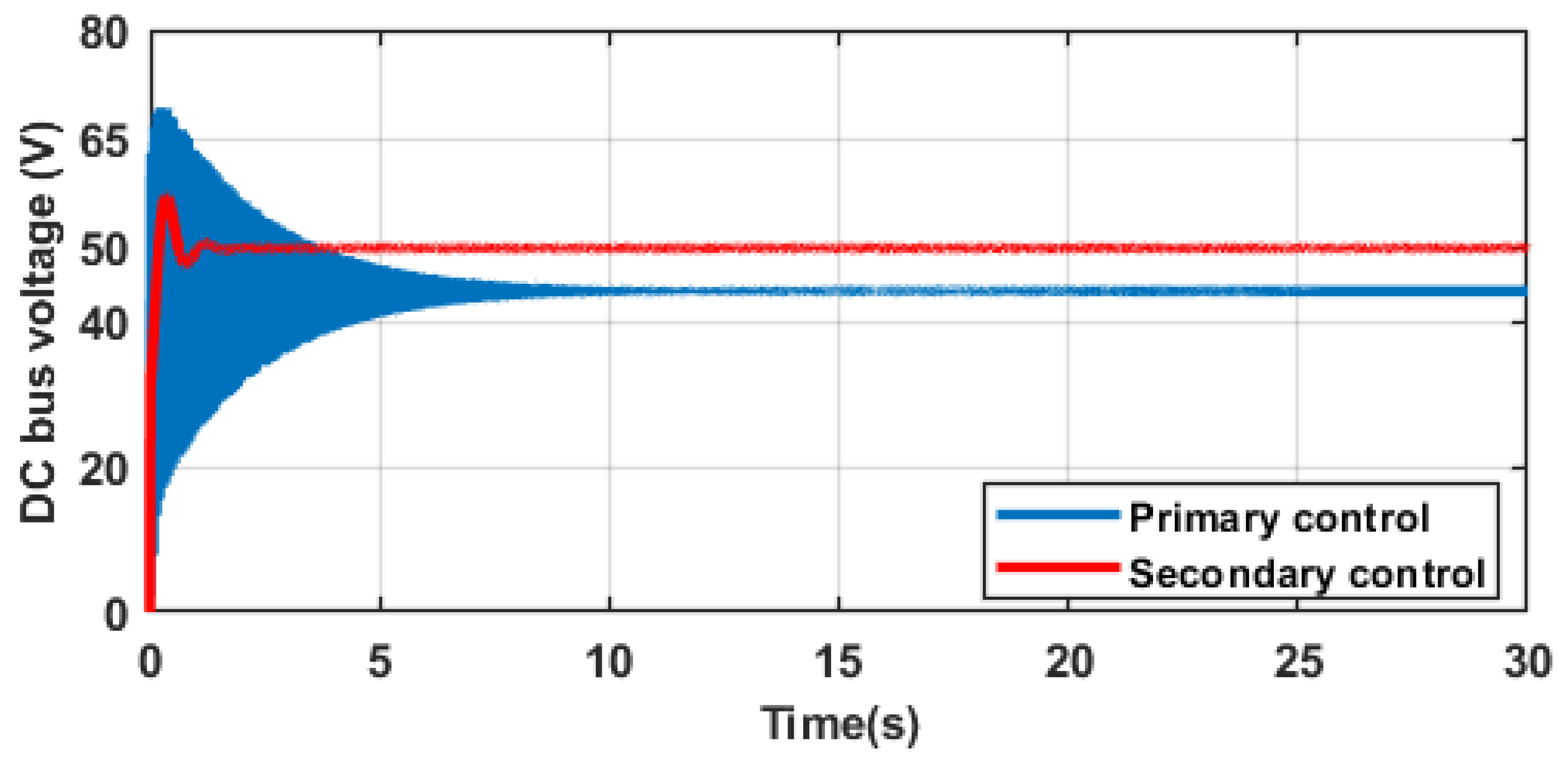
5.1. Stability Analysis
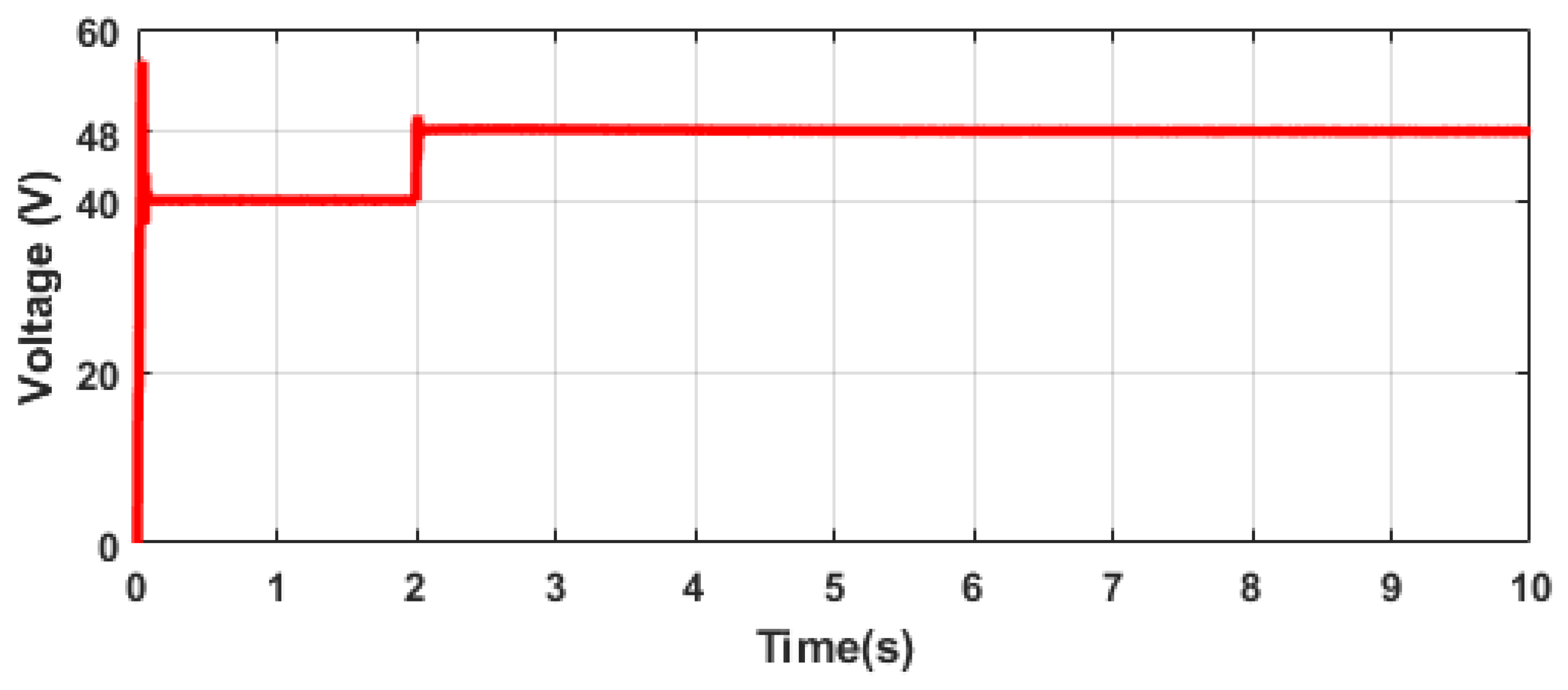
5.2. Actualization of Control Objectives by Using Proposed Optimized Distributed Secondary Control Scheme
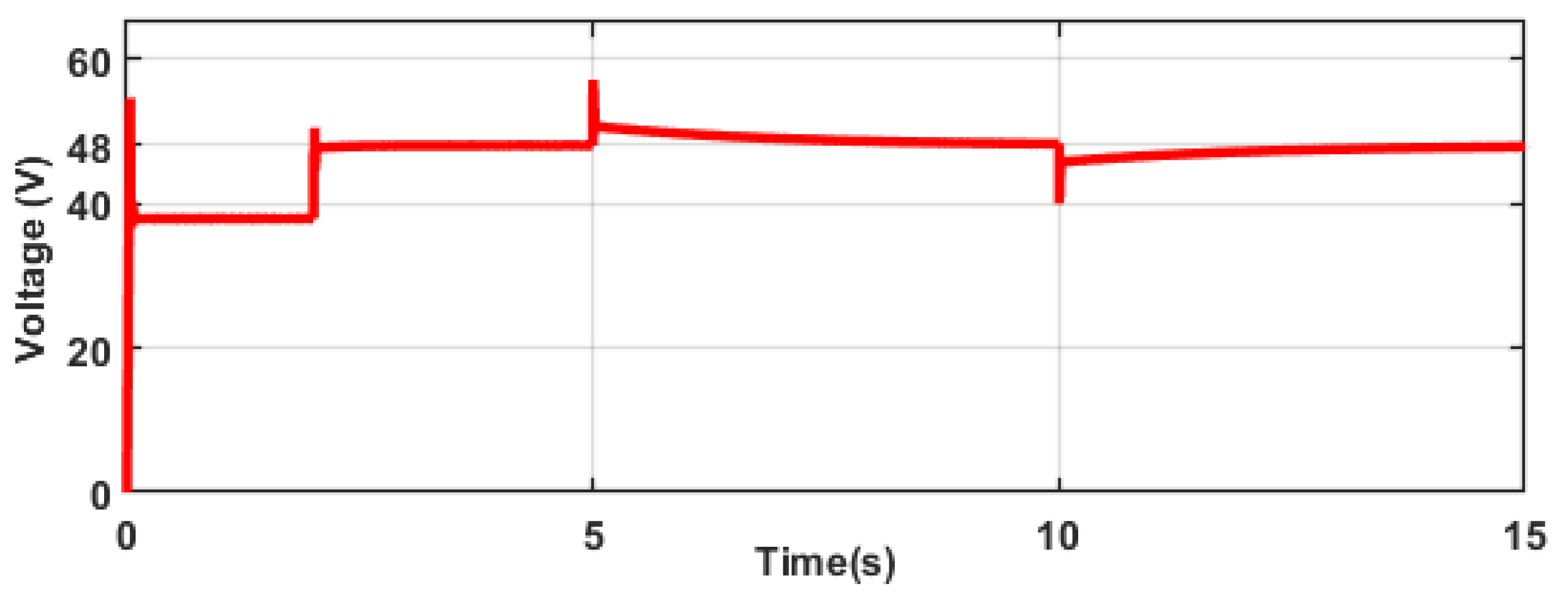
5.3. Validation by Using Real-Time Experimental Simulation
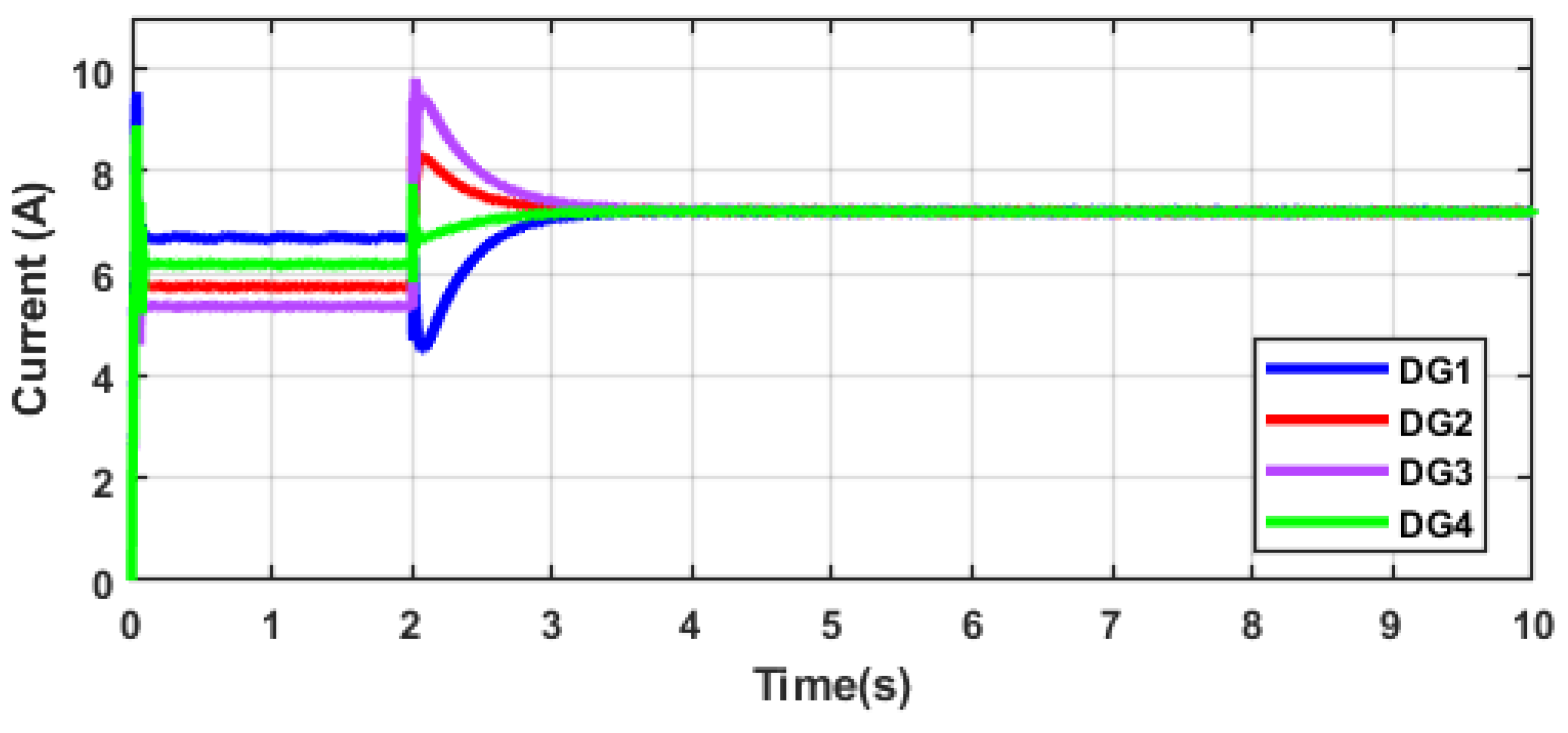
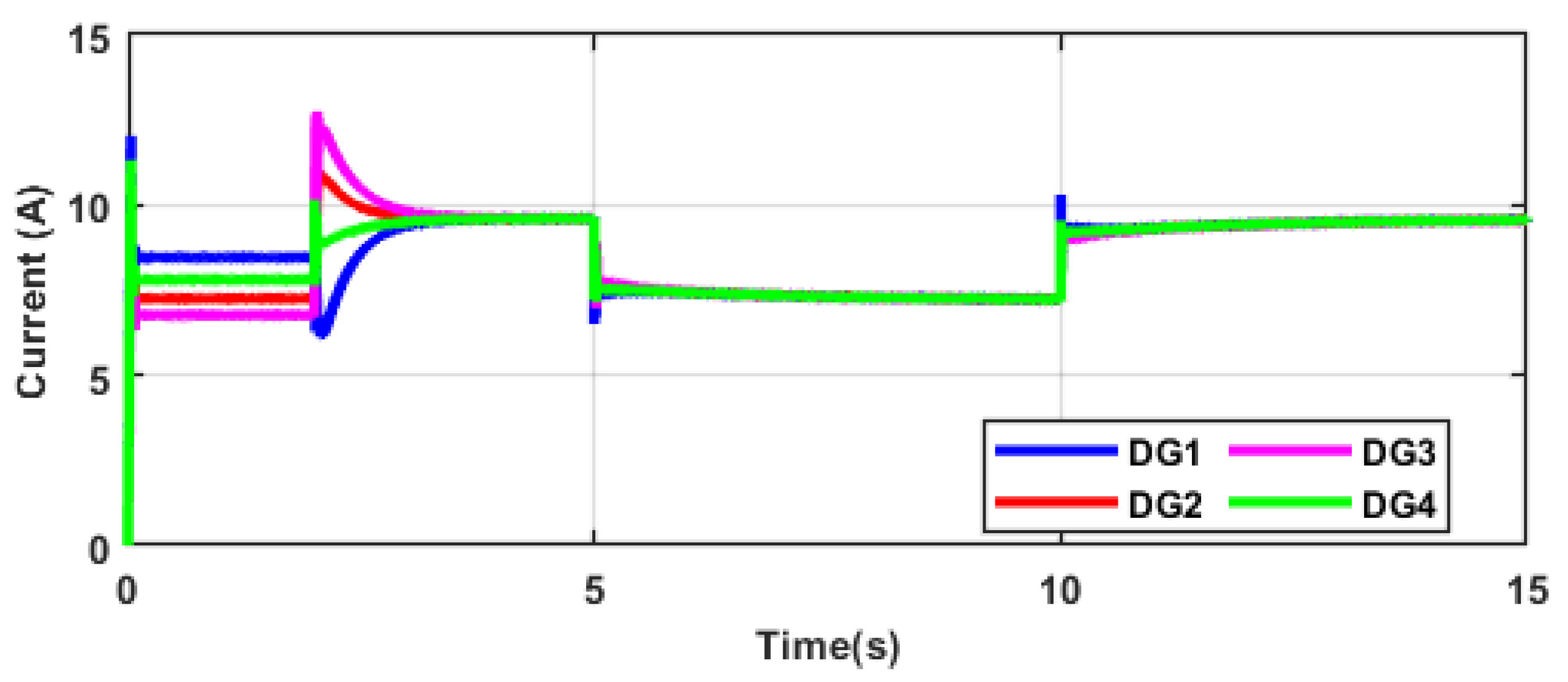
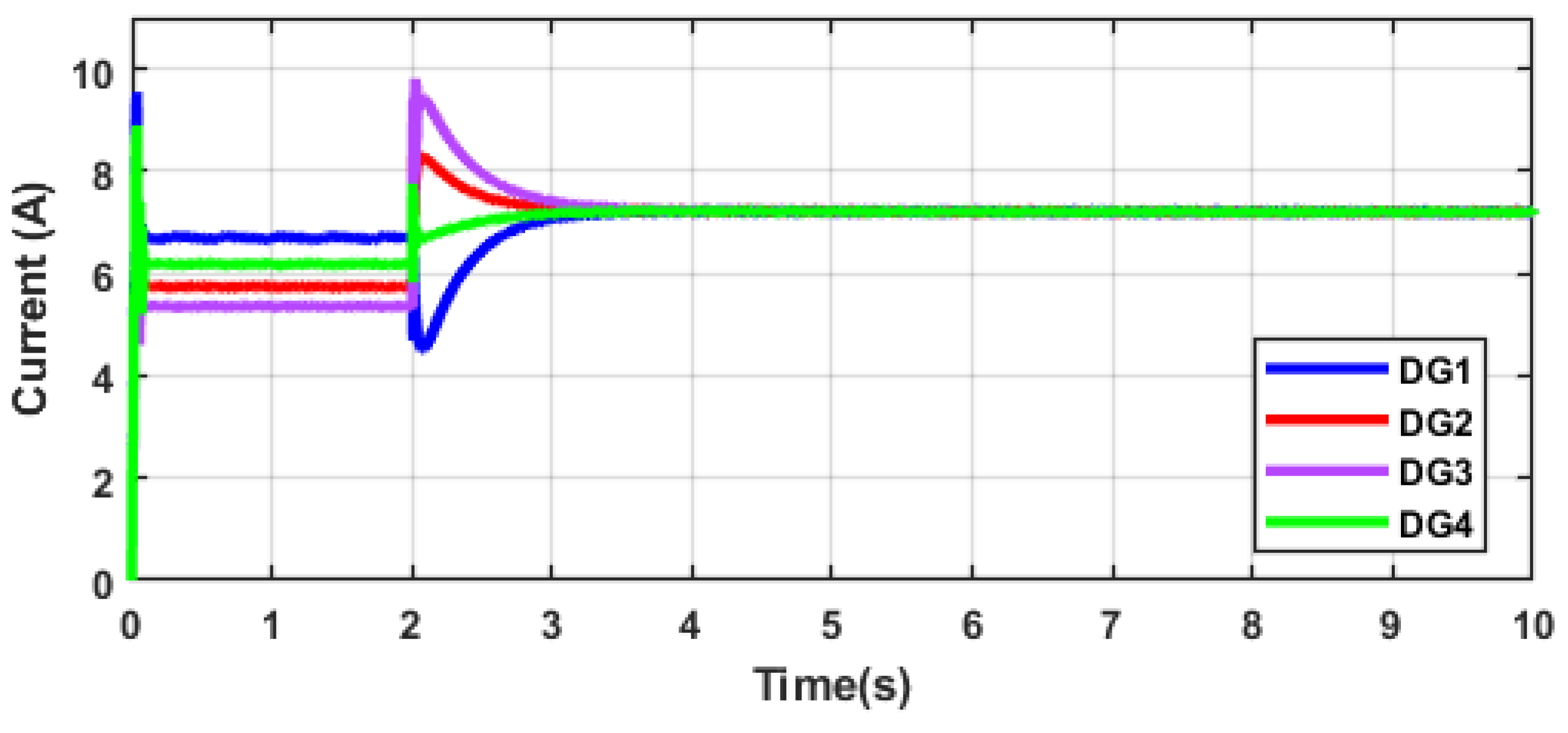
5.3.1. Current Sharing and Voltage Regulation Test
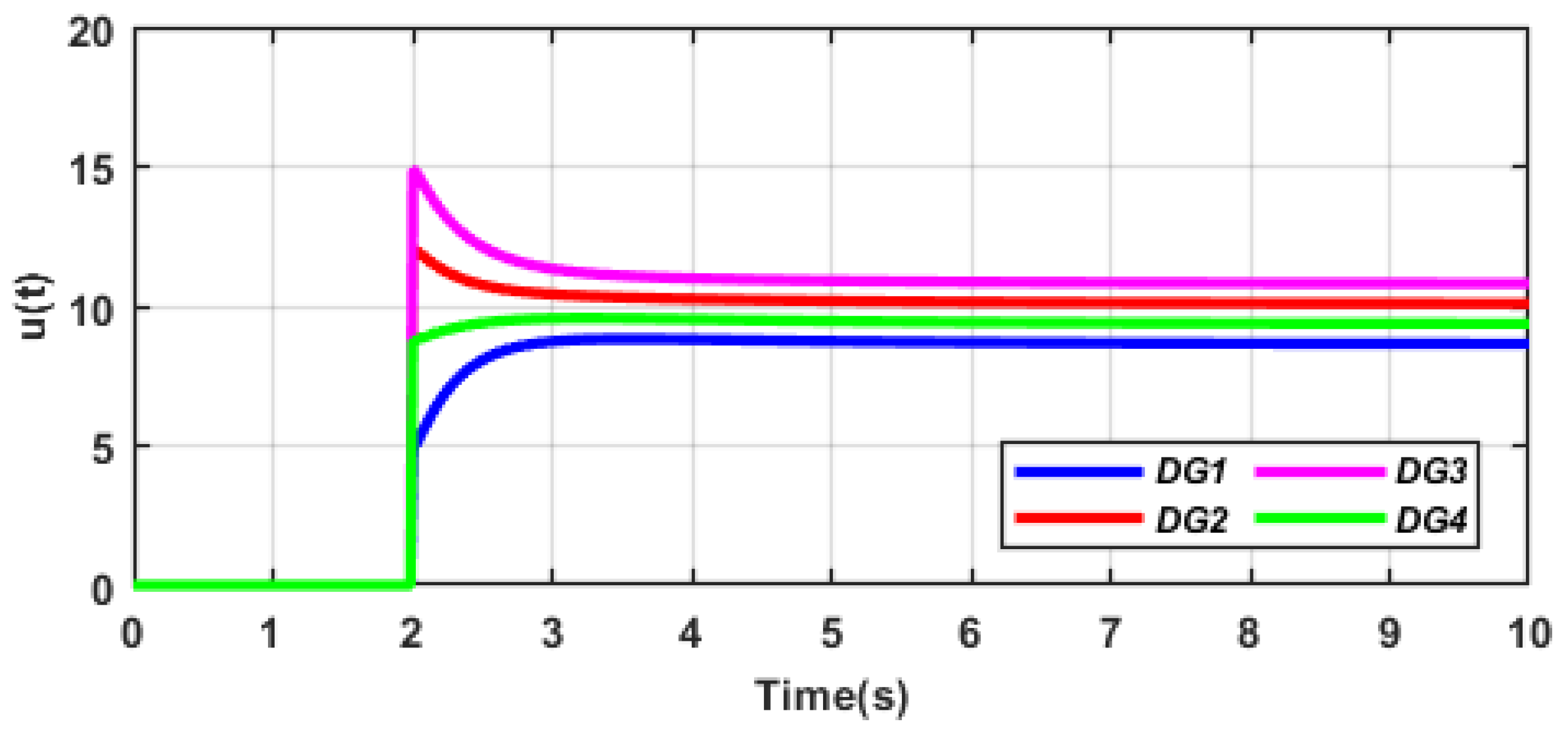
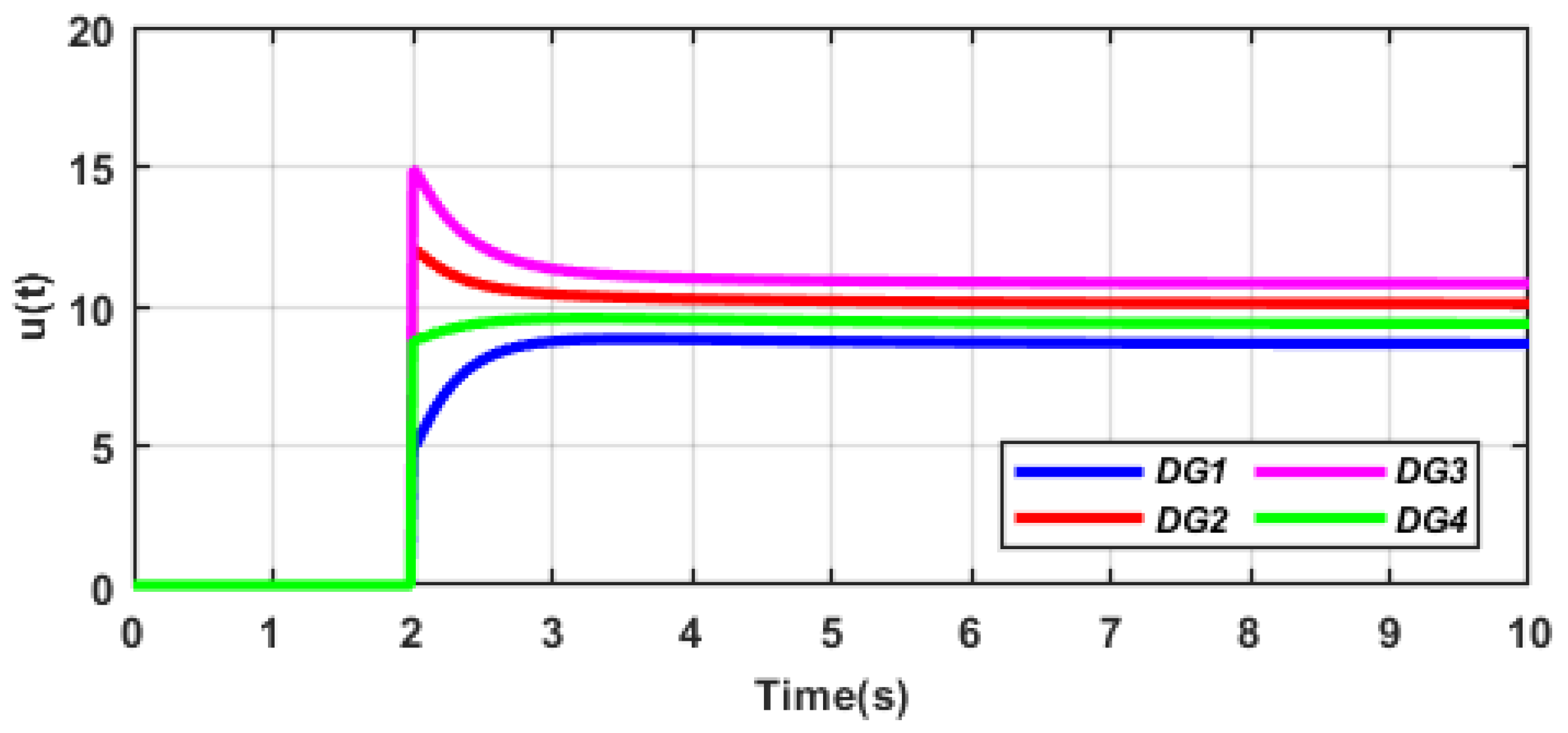
5.3.2. Distributed Property of Proposed Secondary Controller during Change in Load Scenario
5.4. Comparison with Other Distributed Control Schemes
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC microgrids—Part I: A review of control strategies and stabilization techniques. IEEE Trans. Power Electron. 2015, 31, 4876–4891. [Google Scholar]
- Aluko, A.; Musumpuka, R.; Dorrell, D. Cyberattack-Resilient Secondary Frequency Control Scheme for Stand-Alone Microgrids. IEEE Trans. Ind. Electron. 2022, 1. [Google Scholar] [CrossRef]
- Xia, Y.; Wei, W.; Peng, Y.; Yang, P.; Yu, M. Decentralized coordination control for parallel bidirectional power converters in a grid-connected DC microgrid. IEEE Trans. Smart Grid 2017, 9, 6850–6861. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan, K.W.; Islam, S. A unified model predictive voltage and current control for microgrids with distributed fuzzy cooperative secondary control. IEEE Trans. Ind. Inform. 2021, 17, 8024–8034. [Google Scholar] [CrossRef]
- Hamad, A.A.; Azzouz, M.A.; El-Saadany, E.F. Multiagent supervisory control for power management in DC microgrids. IEEE Trans. Smart Grid 2016, 7, 1057–1068. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B. Optimal voltage level for DC microgrids. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 3034–3039. [Google Scholar]
- Al-Ismail, F.S. DC microgrid planning, operation, and control: A comprehensive review. IEEE Access 2021, 9, 36154–36172. [Google Scholar] [CrossRef]
- Gao, L.; Liu, Y.; Ren, H.; Guerrero, J.M. A DC microgrid coordinated control strategy based on integrator current-sharing. Energies 2017, 10, 1116. [Google Scholar] [CrossRef] [Green Version]
- Papadimitriou, C.; Zountouridou, E.; Hatziargyriou, N. Review of hierarchical control in DC microgrids. Electr. Power Syst. Res. 2015, 122, 159–167. [Google Scholar] [CrossRef]
- Thomas, V.; Kumaravel, S.; Ashok, S. Control of parallel DC-DC converters in a DC microgrid using virtual output impedance method. In Proceedings of the 2016 2nd International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), Chennai, India, 27–28 February 2016; pp. 587–591. [Google Scholar]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An adaptive droop control scheme for DC microgrids integrating sliding mode voltage and current controlled boost converters. IEEE Trans. Smart Grid 2017, 10, 1685–1693. [Google Scholar] [CrossRef]
- Yang, Q.; Jiang, L.; Zhao, H.; Zeng, H. Autonomous voltage regulation and current sharing in islanded multi-inverter DC microgrid. IEEE Trans. Smart Grid 2018, 9, 6429–6437. [Google Scholar] [CrossRef]
- Peyghami, S.; Mokhtari, H.; Davari, P.; Loh, P.C.; Blaabjerg, F. On secondary control approaches for voltage regulation in DC microgrids. IEEE Trans. Ind. Appl. 2017, 53, 4855–4862. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Caldognetto, T.; Mattavelli, P.; Magnone, P. Power-based droop control in dc microgrids enabling seamless disconnection from upstream grids. IEEE Trans. Power Electron. 2019, 34, 2039–2051. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Jin, X.; Wu, X.; Acuna, P.; Aguilera, R.P.; Morstyn, T.; Agelidis, V.G. Decentralised control method for DC microgrids with improved current sharing accuracy. IET Gener. Transm. Distrib. 2017, 11, 696–706. [Google Scholar] [CrossRef]
- Nahata, P.; La Bella, A.; Scattolini, R.; Ferrari-Trecate, G. Hierarchical control in islanded DC microgrids with flexible structures. IEEE Trans. Control. Syst. Technol. 2020, 29, 2379–2392. [Google Scholar] [CrossRef]
- Guo, F.; Xu, Q.; Wen, C.; Wang, L.; Wang, P. Distributed secondary control for power allocation and voltage restoration in islanded DC microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1857–1869. [Google Scholar] [CrossRef]
- Guo, F.; Wang, L.; Wen, C.; Zhang, D.; Xu, Q. Distributed voltage restoration and current sharing control in islanded DC microgrid systems without continuous communication. IEEE Trans. Ind. Electron. 2020, 67, 3043–3053. [Google Scholar] [CrossRef]
- Sahoo, S.; Mishra, S. A distributed finite-time secondary average voltage regulation and current sharing controller for DC microgrids. IEEE Trans. Smart Grid 2018, 10, 282–292. [Google Scholar] [CrossRef]
- Liu, X.K.; He, H.; Wang, Y.W.; Xu, Q.; Guo, F. Distributed hybrid secondary control for a DC microgrid via discrete-time interaction. IEEE Trans. Energy Convers. 2018, 33, 1865–1875. [Google Scholar] [CrossRef]
- Liu, X.K.; Jiang, H.; Wang, Y.W.; He, H. A distributed iterative learning framework for DC microgrids: Current sharing and voltage regulation. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 4, 119–129. [Google Scholar] [CrossRef]
- Aluko, A.O.; Carpanen, R.P.; Dorrell, D.G.; Ojo, E.E. Impact Assessment and Mitigation of Cyber Attacks on Frequency Stability of Isolated Microgrid Using Virtual Inertia Control. In Proceedings of the 2020 IEEE PES/IAS PowerAfrica, Virtual Event, 25–28 August 2020; pp. 1–5. [Google Scholar]
- Aluko, A.O.; Dorrell, D.G.; Pillay Carpanen, R.; Ojo, E.E. Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment. Energies 2020, 13, 564. [Google Scholar] [CrossRef] [Green Version]
- Aluko, A.O.; Dorrell, D.G.; Carpanen, R.P.; Ojo, E.E. Heuristic Secondary Frequency Control of AC/DC Interconnected Power System in a Deregulated Environment. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Multiobjective cuckoo search for design optimization. Comput. Oper. Res. 2013, 40, 1616–1624. [Google Scholar] [CrossRef]
- Ghanbari, N.; Bhattacharya, S.; Mobarrez, M. Modeling and stability analysis of a dc microgrid employing distributed control algorithm. In Proceedings of the 2018 9th IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–7. [Google Scholar]
- Liu, X.K.; Wang, Y.W.; Lin, P.; Wang, P. Distributed supervisory secondary control for a DC microgrid. IEEE Trans. Energy Convers. 2020, 35, 1736–1746. [Google Scholar] [CrossRef]
- Dong, M.; Li, L.; Nie, Y.; Song, D.; Yang, J. Stability analysis of a novel distributed secondary control considering communication delay in DC microgrids. IEEE Trans. Smart Grid 2019, 10, 6690–6700. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated DC Bus Voltage | 380 V | |
| Rated Converter Power | P | 50 kW |
| Switching Frequency | 20 kHz | |
| Output Inductance | L | 5 mH |
| Output Capacitance | C | 500 F |
| Load | ||
| Primary Control | ||
| Current Controller | 2.5 | |
| 5 | ||
| Voltage Controller | 0.248 | |
| 2 | ||
| Droop resistance | ||
| ABC Algorithm Parameters | ||
| Maximum number of runs | 50 | |
| Size of colony | 50 | |
| Size of collector bees | 25 | |
| Size of observer bees | 25 | |
| Number of design variables | 1 | |
| limit cycle | ||
| Mode | Primary Control | Secondary Control |
|---|---|---|
| −157.05 | −249.34 + j367.11 | |
| 11.46 + j110.71 | −249.34 − j367.11 | |
| 11.46 − j110.71 | −3.16 + j8.14 | |
| −11.69 | −3.16 − j8.14 | |
| −4.80 + j60.66 | −0.58 + j13.48 | |
| −4.80 + j60.66 | −0.58 − j13.48 | |
| −4.80 + j60.66 | −370.51 | |
| −4.80 + j60.66 | −370.51 | |
| −2.88 | −3.34 | |
| −2.88 | −0.58 + j13.8 | |
| — | −0.58 − j13.8 | |
| — | −3.34 | |
| — | −3.34 |
| Parameter | Symbol | Value |
|---|---|---|
| Reference DC Bus Voltage | 48 V | |
| Source Voltage | 100 V | |
| Sampling Frequency | 10 kHz | |
| Filter Inductance | 1 mH | |
| Filter Capacitance | 235 F | |
| Line Resistance | ||
| Load | ||
| Primary Control loop | ||
| Current Controller | 0.05 | |
| 148 | ||
| Voltage Controller | 0.248 | |
| 36 | ||
| Droop Control | ||
| Secondary Control loop | ||
| Voltage Deviation Parameter | 1.25 | |
| Current Deviation Parameter | 7.5 | |
| Control Objective | TSC | SSC | CSC | Proposed Control |
|---|---|---|---|---|
| Voltage Regulation | 2 s | 1.72 s | 3 s | ≤0.1 s |
| Current Sharing | 2.5 s | 2 s | 3.4 s | 1.2 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aluko, A.; Swanson, A.; Jarvis, L.; Dorrell, D. Modeling and Stability Analysis of Distributed Secondary Control Scheme for Stand-Alone DC Microgrid Applications. Energies 2022, 15, 5411. https://doi.org/10.3390/en15155411
Aluko A, Swanson A, Jarvis L, Dorrell D. Modeling and Stability Analysis of Distributed Secondary Control Scheme for Stand-Alone DC Microgrid Applications. Energies. 2022; 15(15):5411. https://doi.org/10.3390/en15155411
Chicago/Turabian StyleAluko, Anuoluwapo, Andrew Swanson, Leigh Jarvis, and David Dorrell. 2022. "Modeling and Stability Analysis of Distributed Secondary Control Scheme for Stand-Alone DC Microgrid Applications" Energies 15, no. 15: 5411. https://doi.org/10.3390/en15155411
APA StyleAluko, A., Swanson, A., Jarvis, L., & Dorrell, D. (2022). Modeling and Stability Analysis of Distributed Secondary Control Scheme for Stand-Alone DC Microgrid Applications. Energies, 15(15), 5411. https://doi.org/10.3390/en15155411