Investigation of an Inset Micro Permanent Magnet Synchronous Motor Using Soft Magnetic Composite Material


Abstract
1. Introduction
2. Inset Permanent Magnet Synchronous Motors Design and Analysis
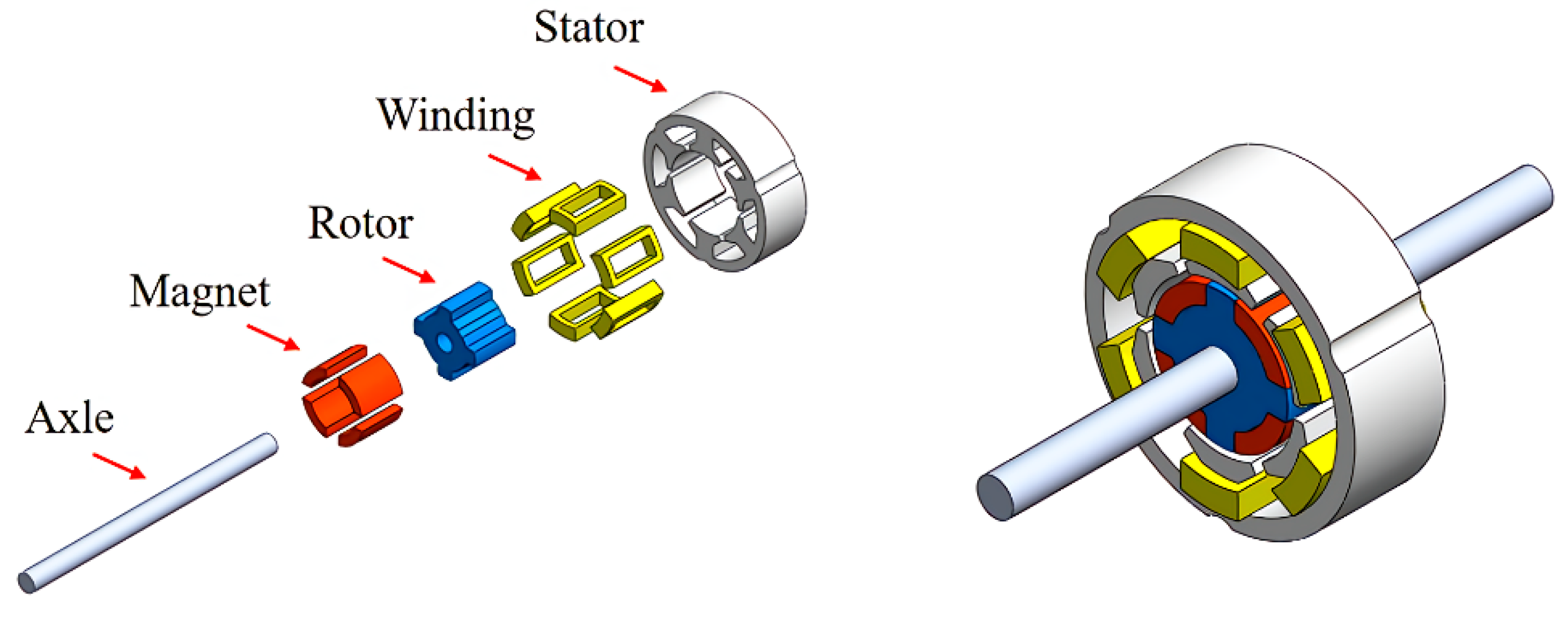
2.1. Inset Permanent Magnet Synchronous Motors Design
2.2. Rotor Design of the Inset Permanent Magnet Synchronous Motor
2.3. Electromagnetic Analysis of Inset Permanent Magnet Synchronous Motor
2.4. Improved Designs of Inset Permanent Magnet Synchronous Motors
3. Fabrication and Assembly of Inset Permanent Magnet Synchronous Motors
3.1. Fabrication of Motor Stator and Rotor
3.2. Motor Assembly
4. Properties Testing of Inset Permanent Magnet Synchronous Motors
4.1. Motor Speed Testing
4.2. Motor Torque Testing
4.3. Motor BEMF Testing
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rahideh, A.; Korakianitis, T. Analytical Magnetic Field Distribution of Slotless Brushless Machines with Inset Permanent Magnets. IEEE Trans. Magn. 2011, 47, 1763–1774. [Google Scholar] [CrossRef]
- Zhao, W.; Lipo, T.A.; Kwon, B. Optimal Design of a Novel Asymmetrical Rotor Structure to Obtain Torque and Efficiency Improvement in Surface Inset PM Motors. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Boroujeni, S.T.; Emami, S.P.; Jalali, P. Analytical modeling of eccentric PM-inset machines with a slotless armature. IEEE Trans. Energy Convers. 2019, 34, 1466–1474. [Google Scholar] [CrossRef]
- Qu, B.; Yang, Q.; Li, Y.; Sotelo, M.A.; Ma, S.; Li, Z. A Novel Surface Inset Permanent Magnet Synchronous Motor for Electric Vehicles. Symmetry 2020, 12, 179. [Google Scholar] [CrossRef]
- Haraguchi, H.; Morimoto, S.; Sanada, M. Suitable design of a PMSG for a large-scale wind power generator. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009. [Google Scholar]
- Boztas, G.; Aydogmus, O. Design of a High-Speed PMSM for Flywheel Systems. In Proceedings of the 2019 4th International Conference on Power Electronics and Their Applications (ICPEA), Elazig, Turkey, 25–27 September 2019. [Google Scholar]
- Hwang, C.C.; Liu, C.T.; Teng, C.C. Design and analysis of a novel inset permanent magnet synchronous motor. J. Magn. Magn. Mater. 2008, 320, e283–e286. [Google Scholar] [CrossRef]
- Büttgenbach, S. Electromagnetic Micromotors—Design, Fabrication and Applications. Micromachines 2014, 5, 929–942. [Google Scholar] [CrossRef]
- Pang, D.C.; Lai, Y.W. Rapid Prototyping of a Micromotor with an Optical Rotary Encoder. Micromachines 2017, 8, 174. [Google Scholar]
- Persson, M.; Jansson, P.; Jack, A.G.; Mecrow, B.C. Soft magnetic composite materials-use for electrical machines. In Proceedings of the 1995 Seventh International Conference on Electrical Machines and Drives (Conf. Publ. No. 412), Durham, UK, 11–13 September 1995. [Google Scholar]
- Shokrollahi, H.; Janghorban, K. Soft magnetic composite materials (SMCs). J. Mater. Process. Technol. 2007, 189, 1–12. [Google Scholar] [CrossRef]
- Somaloy, Powders for Electromagnetic Applications. Available online: https://www.hoganas.com/en/powder-technologies/soft-magnetic-composites/products/coated-powders-for-electromagnetic-applications (accessed on 9 July 2020).
- Anderson, O.; Hofecker, P. Advances in soft magnetic composites—Materials and applications. In Proceedings of the PowderMet2009, Las Vegas, NV, USA, 1 July 2009. [Google Scholar]
- Wang, B.; Xu, Y.; Xu, L.; Xin, F. A novel PMSM with 3-dimensional magnetic circuit using SMC core. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017. [Google Scholar]
- Guo, Y.G.; Zhu, J.G.; Watterson, P.A.; Holliday, W.M.; Wu, W. Improved design and performance analysis of a claw pole permanent SMC motor with sensorless brushless DC drive. In Proceedings of the Fifth International Conference on Power Electronics and Drive Systems (PEDS), Singapore, 17–20 November 2003. [Google Scholar]
- Doering, J.; Steinborn, G.; Hofmann, W. Torque, power, losses, and heat calculation of a transverse flux reluctance machine with soft magnetic composite materials and disk-shaped rotor. IEEE Trans. Ind. Appl. 2015, 51, 1494–1504. [Google Scholar] [CrossRef]
- Morimoto, M. Induction motor made of iron powder core. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 21–24 June 2010. [Google Scholar]
- Kim, C.W.; Jang, G.H.; Kim, J.M.; Ahn, J.H.; Baek, C.H.; Choi, J.Y. Comparison of Axial Flux Permanent Magnet Synchronous Machines With Electrical Steel Core and Soft Magnetic Composite Core. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Marignetti, F.; Colli, V.D.; Carbone, S. Comparison of Axial Flux PM Synchronous Machines With Different Rotor Back Cores. IEEE Trans. Magn. 2010, 46, 598–601. [Google Scholar] [CrossRef]
- Ishikawa, T.; Sato, Y.; Kurita, N. Performance of Novel Permanent Magnet Synchronous Machines Made of Soft Magnetic Composite Core. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Deodhar, R.P.; Pride, A.; Bremner, J.J. Design Method and Experimental Verification of a Novel Technique for Torque Ripple Reduction in Stator Claw-Pole PM Machines. IEEE Trans. Ind. Appl. 2015, 51, 3743–3750. [Google Scholar] [CrossRef]
- Liu, C.; Lei, G.; Ma, B.; Guo, Y.; Zhu, J. Robust Design of a Low-Cost Permanent Magnet Motor with Soft Magnetic Composite Cores Considering the Manufacturing Process and Tolerances. Energies 2018, 11, 2025. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, S.; Wu, L.; Zhao, M.; Hu, C. Iron Loss and Thermal Analysis of High Speed PM motor Using Soft Magnetic Composite Material. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical Specifications | |||||||
|---|---|---|---|---|---|---|---|
| Stator | Slots | 6 | Rotor | Poles | 4 | ||
| External diameter | 15 mm | External diameter | 7.4 mm | ||||
| Internal diameter | 8.2 mm | Internal diameter | 2 mm | ||||
| Stack length | 5 mm | PM thickness | 1 mm | ||||
| Air gap length | 0.4 mm | Interpole iron width | 1.6 mm | ||||
| Electrical Specifications | |||||||
| Phase | 3 | Step angle | 60° | ||||
| Number of turns of coil | 60 turns | Diameter of coil | 0.162 mm | ||||
| Maximum current | 1 A | Resistance of coil | 2.65 Ω | ||||
| d (mm) | Tavg (mN-m) | Tripple (%) | Vol (mm3) | Tv (mN-m/mm3) |
|---|---|---|---|---|
| 0 | 3.608 | 90.33 | 25.53 | 0.141 |
| 0.5 | 3.503 | 82.73 | 23.02 | 0.152 |
| 1 | 3.316 | 68.00 | 20.51 | 0.162 |
| 1.5 | 3.065 | 70.43 | 17.96 | 0.171 |
| 2 | 2.763 | 98.30 | 15.36 | 0.180 |
| d (mm) | Tavg (mN-m) | Tripple (%) | Vol (mm3) | Tv (mN-m/mm3) |
|---|---|---|---|---|
| 1.1 | 3.270 | 62.96 | 20.00 | 0.164 |
| 1.2 | 3.222 | 62.70 | 19.49 | 0.165 |
| 1.3 | 3.172 | 64.68 | 18.98 | 0.167 |
| 1.4 | 3.119 | 67.25 | 18.47 | 0.169 |
| 1.5 | 3.065 | 70.43 | 17.96 | 0.171 |
| 1.6 | 3.008 | 74.77 | 17.44 | 0.172 |
| 1.7 | 2.950 | 80.40 | 16.92 | 0.174 |
| 1.8 | 2.889 | 87.73 | 16.40 | 0.176 |
| 1.9 | 2.827 | 93.87 | 15.88 | 0.178 |
| Motor Type and Model | Tavg (mN-m) | Tripple (%) | BEMF (V) |
|---|---|---|---|
| 35CS300 | 3.008 | 74.77 | 3.766 |
| Somaloy 700 1P | 2.731 | 64.39 | 3.335 |
| Difference | 9.2% | 13.9% | 11.4% |
| Motor Type and Model | Tavg (mN-m) | Tripple (%) | BEMF (V) |
|---|---|---|---|
| 35CS300 | 3.072 | 97.33 | 3.896 |
| Somaloy 1000 3P | 2.977 | 95.77 | 3.770 |
| KT (mN-m/A) | 35CS300 Motor | SMC Motor | Difference |
|---|---|---|---|
| Theory | 2.98 | 2.71 | 9.06% |
| Experiment | 2.59 | 2.37 | 8.49% |
| Error | −13.1% | −12.5% | N/A |
| KV (mV/(rad/s)) | 35CS300 Motor | SMC Motor | Difference |
|---|---|---|---|
| Theory | 4.01 | 3.57 | 11.0% |
| Experiment | 3.50 | 3.08 | 12.0% |
| Error | −12.7% | −13.7% | N/A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, D.-C.; Shi, Z.-J.; Xie, P.-X.; Huang, H.-C.; Bui, G.-T. Investigation of an Inset Micro Permanent Magnet Synchronous Motor Using Soft Magnetic Composite Material. Energies 2020, 13, 4445. https://doi.org/10.3390/en13174445
Pang D-C, Shi Z-J, Xie P-X, Huang H-C, Bui G-T. Investigation of an Inset Micro Permanent Magnet Synchronous Motor Using Soft Magnetic Composite Material. Energies. 2020; 13(17):4445. https://doi.org/10.3390/en13174445
Chicago/Turabian StylePang, Da-Chen, Zhen-Jia Shi, Pei-Xuan Xie, Hua-Chih Huang, and Gia-Thinh Bui. 2020. "Investigation of an Inset Micro Permanent Magnet Synchronous Motor Using Soft Magnetic Composite Material" Energies 13, no. 17: 4445. https://doi.org/10.3390/en13174445
APA StylePang, D.-C., Shi, Z.-J., Xie, P.-X., Huang, H.-C., & Bui, G.-T. (2020). Investigation of an Inset Micro Permanent Magnet Synchronous Motor Using Soft Magnetic Composite Material. Energies, 13(17), 4445. https://doi.org/10.3390/en13174445