Abstract
This manuscript aims to incorporate an inertial scheme with Popov’s subgradient extragradient method to solve equilibrium problems that involve two different classes of bifunction. The novelty of our paper is that methods can also be used to solve problems in many fields, such as economics, mathematical finance, image reconstruction, transport, elasticity, networking, and optimization. We have established a weak convergence result based on the assumption of the pseudomonotone property and a certain Lipschitz-type cost bifunctional condition. The stepsize, in this case, depends upon on the Lipschitz-type constants and the extrapolation factor. The bifunction is strongly pseudomonotone in the second method, but stepsize does not depend on the strongly pseudomonotone and Lipschitz-type constants. In contrast, the first convergence result, we set up strong convergence with the use of a variable stepsize sequence, which is decreasing and non-summable. As the application, the variational inequality problems that involve pseudomonotone and strongly pseudomonotone operator are considered. Finally, two well-known Nash–Cournot equilibrium models for the numerical experiment are reviewed to examine our convergence results and show the competitive advantage of our suggested methods.
1. Introduction
An Equilibrium problem (EP) was originally started in the unifying feature by Blum and Oettli [1] in 1994 and provided a detailed investigation of their theoretical properties. This study contributes significantly to the advancement of applied and pure science. This problem is primarily related to Ky Fan Inequity due to his early contributions to this field [2]. It has been established that the equilibrium problem theory has set up an unique approach to investigate an immense range of topics that have appeared in social and physical science. For instance, it might involve physical or mechanical structures, chemical processes [3], the distribution of traffic over computer, and telecommunication networks or public roads [4,5,6,7]. In economics, it often refers to production competition [8] or the dynamics of offer and demand [9], exploiting the mathematical model of non-cooperative games and the analogous equilibrium concept by Nash [10,11]. The problem of equilibrium, as a particular case, includes many mathematical problems as a particular case, such as the variational inequality problems (VIP), problems of minimization, the fixed point problems, Nash equilibrium of non-cooperative games, complementarity problems, and saddle point problem (see e.g., [1,12]).
On the other hand, iterative methods are efficient techniques for determining the approximate solution of an equilibrium problem. In that case, two major approaches that are well-known i.e., the proximal point method [13] and auxiliary problem principle [14]. The proximal point method strategy was initially developed by Martinet [15] for the monotone variational inequality problems and later Rockafellar [16] extends this approach for monotone operators. Moudafi [13] proposed the proximal point method for monotone equilibrium problems. Konnov [17] also suggests a different interpretation of the proximal point method with weaker assumptions for equilibrium problems.
In addition, inertial-type methods are additionally significant, depending on the heavy-ball methods of the second-order time dynamic system. Polyak began by considering inertial extrapolation as an acceleration procedure to deal with the problem of smooth convex minimization. Inertial-type algorithms are two-step iterative schemes, and the next iteration is determined by using the previous two iterations and it can be viewed as an accelerating step of the iterative sequence. A large number of methods are the earliest, being set up for solving the problem (EP) in finite and infinite-dimensional spaces, such as the proximal point-like methods [13,18], the extragradient methods [19,20,21,22,23], the subgradient extragradient methods [24,25,26], the inertia methods [27,28,29,30,31,32] and others in [33,34].
In this work, our focus is on the proximal point method, in particular projection methods, which are well established and technically easy to implement due to their convenient numerical computation. This manuscript aims to suggest two modifications of the results that appeared in [21,35,36] by applying the inertial scheme that is useful for speeding up the iteration process. The first result includes the two-step inertial Popov’s extragradient method for determining a numerical solution to the pseudomonotone equilibrium problems and the weak convergence of the suggested method is achieved based on the standard assumptions. We also propose an alternative inertial-type method, the second variant of the first method. The second method does not need any information regarding the Lipschitz-type and strongly pseudomonotone constants of a bifunction. A practical explanation for the second method is that it uses a diminishing and non-summable sequence of non-negative real numbers, which are useful in achieving the strong convergence.
This manuscript is arranged, as follows: in Section 2, we provide some essential definitions and useful results. Section 3 and Section 4 include all of our main methods and corresponding convergence results. Section 5 provides the methods for variational inequality problems. Section 6 sets out the numerical tests to show the numerical efficiency of the proposed methods for the test problems based on the Nash–Cournot equilibrium model compare to other existing methods.
2. Background
Let K be a non-empty, convex, and closed subset of the Hilbert space . Let be an operator and is the solution set of a variational inequality problem relative to the operator H upon the set K. Likewise, denotes the solution set of an equilibrium problem on the set K and is any arbitrary element of the solution set or .
Definition 1.
[1] Let be a bifunction with , for each . The equilibrium problem for f upon K is defined, as follows:
Definition 2.
[37] The metric projection of on a closed and convex subset K of is determined, as follows:
Next, we take the concept of monotonicity of a bifunction into account (see [1,38] for details).
Definition 3.
Let on K for is
- (1)
- strongly monotone if
- (2)
- monotone if
- (3)
- strongly pseudomonotone if
- (4)
- pseudomonotone if
- (5)
- satisfying the Lipschitz-type condition on K if there exist constants such thatholds.
This section ends with a few essential lemmas that are useful for examining convergence.
Lemma 1.
[39] Assume that K is non-empty, convex, and closed subset of Hilbert space and is a convex, subdifferentiable, and lower semi-continuous function on . Furthermore, is a minimizer of g if and only if where and denotes the subdifferential of g at and normal cone of K at , respectively.
Lemma 2.
[40] Let be two sequences and with , then .
Lemma 3.
[41] For and then the following relation is true:
Lemma 4.
[42] Assume that , and are sequences in , such that
and also with , such that for all . Subsequently, the following relations are hold.
- (i)
- with
- (ii)
Lemma 5.
[43] Let be a sequence in and such that the following relations are true:
- (i)
- For each , exists;
- (ii)
- Every sequentially weak cluster point of belongs to K;
Subsequently, weakly converges to a point in .
A normal cone of K at is defined as:
Let be a convex function with subdifferential of g at is defined as:
3. Inertial Popov’s Two-Step Subgradient Extragradient Algorithm for Pseudomonotone EP
We present our first method to solve the pseudomonotone equilibrium problems involving the Lipschitz-type condition of a bifunction. It uses an inertial term to boost up the iterative sequence, so we referred it as an “Inertial Popov’s Two-step Subgradient Extragradient Algorithm” for a class pseudomonotone equilibrium problems. The detailed algorithm is given below.
| Algorithm 1 (Two-step Subgradient Extragradient Algorithm for Pseudomonotone EP) |
|
Assumption 1.
Assume that satisfy the following conditions:
- (A1)
- for all and f is pseudomonotone on K;
- (A2)
- f satisfy the Lipschitz-type condition on through two positive constants and ;
- (A3)
- for all and satisfy ;
- (A4)
- is convex and subdifferentiable on for each
Lemma 6.
We have the following crucial inequality that results from the Algorithm 1.
Proof.
By the value through Lemma 1, we have
For , there exists , such that
The above implies that
Because then , It implies that
Due to and by definition of subdifferentiable, we obtain
Lemma 7.
We also have the following inequality from Algorithm 1.
Proof.
The proof is the same as that of Lemma 6. □
Lemma 8.
We have the following inequality from Algorithm 1.
Proof.
Because then the definition of implies that
The above implies that
From and due to subdifferential definition, we have
Set in the above expression
Now, we are proving the validity of the stopping criterion for Algorithm 1.
Lemma 9.
If and in Algorithm 1, then .
Proof.
By substituting in Lemma 6, we have
Because and , , then from Lemma 8, we have
Remark 1.
Two more conditions for stopping criterion are and for Algorithm 1. The validity of these stopping criterion can be shown easily by Lemma 6 and Lemma 7, respectively.
Lemma 10.
Let satisfying the Assumption 1. Assume that is nonempty. Afterwards, for each , we have
Proof.
Substituting into Lemma 6, we obtain
Since then Thus, from (A1) the above expression becomes
Because of the Lipschitz-type condition, we have
From expression (11) and Lemma 8, we obtain
We have the following facts:
We also have the following inequality
From the above two facts and last inequality with (12) provides the required result. □
Now, we are in a position to provide our first convergence result of this work.
Theorem 1.
Assume that , and sequences in generated by Algorithm 1, where the sequence is non-decreasing and λ is a positive real number, such that
Subsequently, the sequences , and are converges weakly to an element of .
Proof.
From Lemma 10, we have
By the definition of in Algorithm 1, we have
By the definition of in Algorithm 1, we also have
By substituting
and due to the inequality From this discussion, the expression (18) turns into following:
where By the value , we have
Combining the expression (19) and (21) implies that
where and
Further, we take It follows from (22) that
Next, we need to compute
The above relation (25) implies that the sequence is non-increasing. From , we have
Additionally, from definition , we have
From the relation (20) and (30), we obtain
Next, the expression (28) implies that
From the relation (18) we have
The following relation can easily be derived:
By the definition of and using Cauchy inequality, we have
Now, summing up the expression (38) for , we obtain
It follows from the relation (16), we obtain
above expression with (30), (40), (37) and Lemma 4 implies that limit of and exists for every , means that the sequences , and are bounded. Next, we need to show that each weak sequential limit point of the sequence belongs to . Let z be arbitrary weak cluster point of the sequence , and then there exists a weak convergent subsequence of converges to , this also implies that also converge weakly to Now our aim to prove that By Lemma 6, the bifunction Lipschitz-type condition and Lemma 8, we have
where y be an any element in As a result with (31), (36), (37), and due to the boundedness of the sequence the above inequality tends to zero. By given , the assumption (A3) and , we obtain
Due to , we obtain This implies that z belongs to Thus Lemma 5, ensures that , and weakly converges to as
Remark 2.
For in Algorithm 1 gives the results as in [35,36].
4. Inertial Popov’s Two-Step Subgradient Extragradient Algorithm for Strongly Pseudomonotone EP
The second algorithm is also an inertial algorithm that is able to solve the strongly pseudomonotone equilibrium problem. However, the advantage of this algorithm is that there is no need for prior information regarding the strongly pseudomonotone constant and Lipschitz constants . Let be a non-increasing sequence, so that the following conditions are satisfied:
Assumption 2.
Let a bifunction satisfies the following conditions:
- (B1)
- and f is strongly pseudomontone on K;
- (B2)
- f meet the Lipschitz-type condition on with two positive constants and ;
- (B3)
- is sub-differentiable and convex on for all
Lemma 11.
Assume that satisfies the conditions (B1)–(B3). Let the solution set is nonempty. For each , we have
Now, we are in a position to provide our second convergence result of this work.
Theorem 2.
Assume that satisfies the conditions (B1)–(B3). Let , and are sequences in generated by Algorithm 2 and is non-decreasing sequence with . Subsequently, , and strongly converge to an element in .
| Algorithm 2 (Two-step Subgradient Extragradient Algorithm for Strongly Pseudomonotone EP) |
|
Proof.
The proof is the identical as the proof of Theorem 1, but there are still few changes. We provide the proof for the readable purpose. By Lemma 11 and adding in both sides, we have
By using the definition of in Algorithm 2, we have
By using the definition in Algorithm 2, we also have
Next, we let and
Due to the above substituting the expression (48) turns into the following:
By the definition , we have
Combining the expression (49) and (50), we obtain
where and In addition, we also take It follows from (51) that
Since , then there exists a finite number such that
The above implies that the sequence is non-increasing for From the value of , we have
From the definition of with the expression (54), we obtain
From the expression (20) and (57), we obtain
The expression (55) implies that
It follows from (48) for all , such that
Consider the expression (60) for Summing them up, we obtain
We can easily derive the following relationship:
By using the value , we obtain
Now, summing up equation (65) for , we obtain
Furthermore, the expression (47) gives that
Now, we are showing that the sequence converges strongly to Due to the condition on for all , we can easily observe the following inequality:
It follows from Lemma 11, such that
From the expression (45) and (71), we obtain
By the Lemma 2 and (74) implies that
Finally, expression (69) and (75) provide that This completes the proof. □
5. Application to Variational Inequality Problems
For considering Algorithm 1 and Theorem 1, we can able to write the next result for solving variational inequality problems that involve pseudomonotone and Lipschitz continuous operator.
Corollary 1.
Assume that be a Lipschitz continuous with the constant L and pseudomonotone operator. Let , and be sequences generated, as follows:
- (i)
- Choose , and Compute
- (ii)
- Given , and for each and construct the half-space first as
- (iii)
- Evaluate
where , such that
with . Subsequently, sequence , and converge weakly to .
From the consideration on Algorithm 2 and Theorem 2, we state the following result for the class of variational inequality problems involving strongly pseudomonotone and Lipschitz continuous operator.
Corollary 2.
Assume that is a Lipschitz continuous and strongly pseudomonotone operator with the constant . Let , and are the sequences generated as follows:
- (i)
- Choose , and a sequence satisfying (43). Compute
- (ii)
- Given , and create a half space for each such that
- (iii)
- Compute
where , with . The sequence , and converge strongly to .
6. Computational Experiment
Some numerical results will be presented in this section to show the performance of our proposed methods. The MATLAB codes run in MATLAB version 9.5 (R2018b) on a PC (with Intel(R) Core(TM)i3-4010U CPU @ 1.70GHz 1.70GHz, RAM 4.00 GB).
6.1. Nash-Cournot Equilibrium Model of Electricity Markets
The Nash–Cournot equilibrium model of electricity markets in [20] is considered in this example. Assume that there are three companies generating electricity. These three companies has generating units denoted as , and , respectively. Let denote the generating power of the each unit for Next, we take the electricity price P as The cost of generating the j unit is written as:
where and Table 1 provides the values of the unknown parameters. Consider that the profit of the firm i is
with corresponding to the constraint set , with and values given in Table 2. Consider the equilibrium function f by
where

Table 1.
The values of parameters are used in the cost function.
Table 2.
The parameter values use for constraint set.
The Nash–Cournot equilibrium models of electricity markets can be seen as an equilibrium problem in the following way (see [44] for more details):
During the numerical example in Section 6.1, we take the values , , .
6.1.1. Algorithm 1 Behaviour for Different Values of :
Figure 1 and Table 3 characterize the behaviour of error term regarding Algorithm 1 (Algo1) with respect to different values of in terms of the number of iterations and elapsed time, respectively.
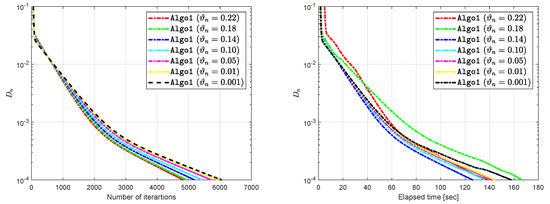
Figure 1.
Experiment in Section 6.1.1: Algorithm 1 behaviour for different values of .
Table 3.
Experiment in Section 6.1.1: Algorithm 1 performance for varying parameters extrapolation factor .
6.1.2. Algorithm 1 Comparison with Existing Algorithms
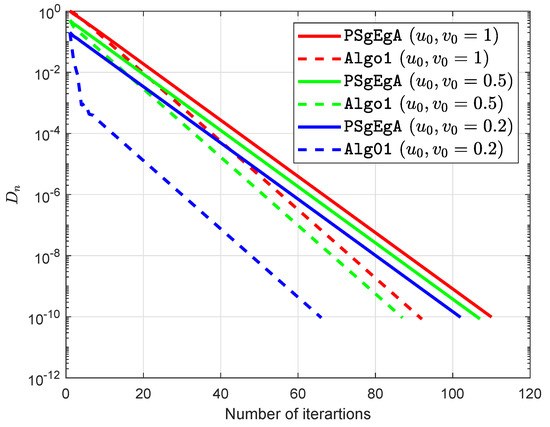
Figure 2 and Table 4 explain the numerical comparison between Algorithm 1 (EgA) in [19], Algorithm 1 (PEgA) in [21], Algorithm 3.1 (PSgEgA) in [35,36] and Algorithm 1(Algo1).
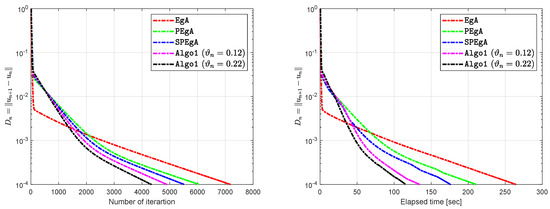
Figure 2.
Comparison of Algorithm 1 with Algorithm 1 in [19], Algorithm 1 in [21], and Algorithm 3.1 in [35,36].
Table 4.
Experiment in Section 6.1.2: Algorithm 1 comparison with existing algorithms using two different values of .
Algorithm 1 (EgA) in [19]: Choose and .
Algorithm 1 (PEgA) in [21]: Choose and .
Algorithm 3.1 (PSgEgA) in [35,36]: Choose and .
- (i)
- (ii)
- Given , , for and construct a half space as
- (iii)
6.1.3. Algorithm 2 Behaviour by Using Different Step-Size Sequences
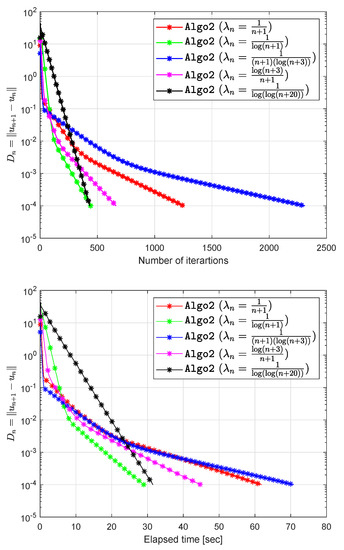
Figure 3.
Algorithm 2 behaviour with respect to different step-size sequences .
Table 5.
Experiment in Section 6.1.3: Algorithm 2 numerical values by using different step-size sequences .
6.2. Example 2
Assume that is defined by
where We can easily see that satisfy all of the conditions (A1)–(A4) with Lipschitz-type constants are (for more details, see [36]).
6.2.1. Algorithm 1 Performance for Different Values of Extrapolation Factor :
Figure 4 and Table 6 show the numerical results regarding the error term of Algorithm 1 using different values of in term of the no.of iterations. For these results, we use values , , and y-axes depict value, whereas x-axes are depicted as the number of iterations. The input and output values of the parameters are shown in Table 6, which are useful for choosing the best extrapolation factor value.
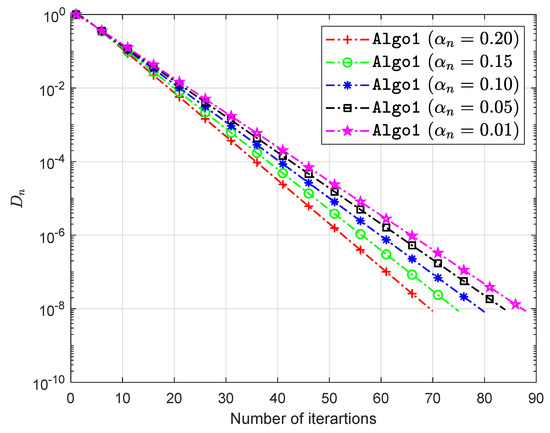
Figure 4.
Experiment in Section 6.2.1: Algorithm 1 behaviour regarding different values of .
Table 6.
Experiment in Section 6.2.1: Algorithm 1 performance for varying parameters extrapolation factor .
6.2.2. Algorithm 1 Comparison with Existing Algorithm
Figure 5 and Table 7 illustrate the comparison of our proposed Algorithm 1 (Algo1) with the existing Algorithm 3.1 (PSgEgA) that appears in the paper of Liu [36]. For these results, the stopping criterion is () and y-axes depict value, whereas the x-axes are depicted as the number of iterations. The input and output values for the parameters are written in Table 7.
6.3. Nash–Cournot Oligopolistic Equilibrium Model
Consider a Nash–Cournot oligopolistic equilibrium model [19] based on n companies that manufacture the same commodity. Each company produces amount of commodity and u denotes a vector whose entries The price function for each company i is defined by , where and , Now, consider a profit function for each company i are , where is the value tax and fee for producing Let is the set of action of each company i and accumulated actions for whole model taken the form as In addition, each company wants to get peak revenue on the assertion that the output of the other companies is an input parameter. The strategy being used to deal with this sort of model mainly focuses on the well-known Nash equilibrium idea. A point is equilibrium point of the model if
with vector denote a vector achievement from by considering with Let with and the problem of determine the Nash equilibrium point is
Next, the bifunction f is written as
where and the matrices P, Q are
with . During this example, we use the values of the parameters , and
6.3.1. Algorithm 2. Behaviour for Different Step-Size Sequences :
The class of step-size sequences used in the experiments are:
- (I)
- (II)
Figure 6 and Figure 7 describe the numerical results for Algorithm 2 (Algo2) by using the above define classes of step-size sequences.
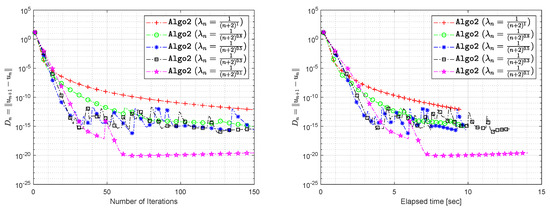
Figure 6.
Experiment in Section 6.3.1: Algorithm 2 behaviour with respect to step-size sequences .
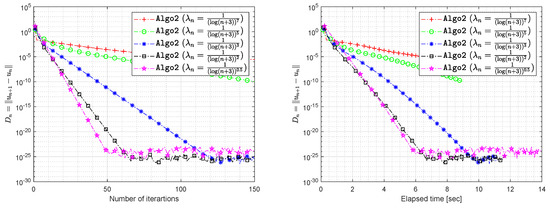
Figure 7.
Experiment in Section 6.3.1: Algorithm 2 behaviour with respect to step-size sequences .
6.3.2. Algorithm 2. Comparison with Existing Algorithms
Figure 8 describes the numerical results of Algorithm 2 (Algo2) using the stepsize sequences .

Figure 8.
Experiment in Section 6.3.2: Comparison of Algorithm 2 with Algorithm 1 (EgM) in [23] and Algorithm 3.1 (PEgM) in [45].
Discussion About Numerical Experiments: We have the following observations regarding the above-mentioned experiments:
- (1)
- (2)
- It can also be acknowledged that the efficiency of the algorithm depends on the complexity of the problem and tolerance of the error term. More time and a significant number of iterations are required in the case of large-scale problems. In this situation, we can see that the certain value of the step-size enhances the performance of the algorithm and boosts the convergence rate.
- (3)
- (4)
- (i)
- No previous information of Lipschitz-constant is required for running algorithms on Matlab.
- (ii)
- In fact, the convergence rate of algorithms depends entirely on the convergence rate of step-size sequences
- (iii)
- The convergence rate of the iterative sequence often depends on the complexity of the problem as well as on the size of the problem.
- (iv)
- Due to the variable step-size sequence, a specific step-size value that is not appropriate for the current iteration of the method often causes inconsistency and a hump in the behavior of the iterative sequence.
7. Conclusions
Two different approaches are proposed in this paper to deal with two families of equilibrium problems. The first algorithm is an inertial two-step step proximal-like method that generates a weak converging iterative sequence and it can solve pseudomonoton equilibrium problems. In addition, we use the diminishing and non-summable step-size sequence for the second algorithm to achieve the strong convergence. The key advantage of the second algorithm is that iterative sequences have been developed with no prior knowledge of a strong pseudomonotonicity and Lipschitz-type constants of a bifunction. Numerical findings were mentioned to show the numerical efficiency of algorithms as compared to other algorithms. Such numerical studies imply that the inertial effects normally enhance the effectiveness of the iterative sequence in this context.
Author Contributions
Conceptualization, H.u.R. and P.K.; methodology, M.S., N.A.A. and W.K.; writing—original draft preparation, H.u.R., P.K. and W.K.; writing—review and editing, H.u.R., P.K., M.S. and N.A.A.; software, H.u.R., M.S. and N.A.A.; supervision, P.K., M.S. and W.K.; project administration and funding acquisition, P.K. and W.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research work was financially supported by King Mongkut’s University of Technology Thonburi through the ‘KMUTT 55th Anniversary Commemorative Fund’. Moreover, this project was supported by Theoretical and Computational Science (TaCS) Center under Computational and Applied Science for Smart research Innovation research Cluster (CLASSIC), Faculty of Science, KMUTT. In particular, Habib ur Rehman was financed by the Petchra Pra Jom Doctoral Scholarship Academic for Ph.D. Program at KMUTT [grant number 39/2560]. Furthermore, Wiyada Kumam was financially supported by the Rajamangala University of Technology Thanyaburi (RMUTTT) (Grant No. NSF62D0604).
Acknowledgments
The first author would like to thank the “Petchra Pra Jom Klao Ph.D. Research Scholarship from King Mongkut’s University of Technology Thonburi”. We are very grateful to editor and the anonymous referees for their valuable and useful comments, which helps in improving the quality of this work.
Conflicts of Interest
The authors declare that they have conflict of interest.
References
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Fan, K. A Minimax Inequality and Applications, INEQUALITIES III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Biegler, L.T. Nonlinear Programming: Concepts, Algorithms, and Applications to Chemical Processes; SIAM-Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010; Volume 10. [Google Scholar]
- Dafermos, S. Traffic Equilibrium and Variational Inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- Ferris, M.C.; Pang, J.S. Engineering and Economic Applications of Complementarity Problems. SIAM Rev. 1997, 39, 669–713. [Google Scholar] [CrossRef]
- Nagurney, A. Network Economics: A Variational Inequality Approach; Springer: Dordrecht, The Netherlands, 1993. [Google Scholar] [CrossRef]
- Patriksson, M. The Traffic Assignment Problem: Models and Methods; Courier Dover Publications: Mineola, NY, USA, 2015. [Google Scholar]
- Cournot, A.A. Recherches sur les Principes Mathématiques de la Théorie des Richesses; Wentworth Press Hachette: Paris, France, 1838. [Google Scholar]
- Arrow, K.J.; Debreu, G. Existence of an Equilibrium for a Competitive Economy. Econometrica 1954, 22, 265. [Google Scholar] [CrossRef]
- Nash, J.F. 5. Equilibrium Points in n-Person Games. In The Essential John Nash; Nasar, S., Ed.; Princeton University Press: Princeton, NJ, USA, 2002; pp. 49–50. [Google Scholar] [CrossRef]
- Nash, J. Non-Cooperative Games. Ann. Math. 1951, 54, 286. [Google Scholar] [CrossRef]
- Muu, L.D.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. Theory, Methods Appl. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Moudafi, A. Proximal point algorithm extended to equilibrium problems. J. Nat. Geom. 1999, 15, 91–100. [Google Scholar]
- Mastroeni, G. On auxiliary principle for equilibrium problems. In Equilibrium Problems and Variational Models; Springer: Berlin, Germany, 2003; pp. 289–298. [Google Scholar]
- Martinet, B. Brève communication. Régularisation d’inéquations variationnelles par approximations successives. Rev. Française D’informatique Et De Rech. Opérationnelle. Série Rouge 1970, 4, 154–158. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Control Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef]
- Konnov, I. Application of the Proximal Point Method to Nonmonotone Equilibrium Problems. J. Optim. Theory Appl. 2003, 119, 317–333. [Google Scholar] [CrossRef]
- Flåm, S.D.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1996, 78, 29–41. [Google Scholar] [CrossRef]
- Quoc Tran, D.; Le Dung, M.N.V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Quoc, T.D.; Anh, P.N.; Muu, L.D. Dual extragradient algorithms extended to equilibrium problems. J. Glob. Optim. 2011, 52, 139–159. [Google Scholar] [CrossRef]
- Lyashko, S.I.; Semenov, V.V. A New Two-Step Proximal Algorithm of Solving the Problem of Equilibrium Programming. In Optimization and Its Applications in Control and Data Sciences; Springer International Publishing: New York, NY, USA, 2016; pp. 315–325. [Google Scholar] [CrossRef]
- Anh, P.N.; Hai, T.N.; Tuan, P.M. On ergodic algorithms for equilibrium problems. J. Glob. Optim. 2015, 64, 179–195. [Google Scholar] [CrossRef]
- Hieu, D.V. New extragradient method for a class of equilibrium problems in Hilbert spaces. Appl. Anal. 2017, 97, 811–824. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019. [Google Scholar] [CrossRef]
- Anh, P.N.; An, L.T.H. The subgradient extragradient method extended to equilibrium problems. Optimization 2012, 64, 225–248. [Google Scholar] [CrossRef]
- Ur Rehman, H.; Kumam, P.; Je Cho, Y.; Suleiman, Y.I.; Kumam, W. Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optimization Methods and Software 2020, 1–32. [Google Scholar] [CrossRef]
- Vinh, N.T.; Muu, L.D. Inertial Extragradient Algorithms for Solving Equilibrium Problems. Acta Math. Vietnam. 2019, 44, 639–663. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Kumam, W.; Shutaywi, M.; Jirakitpuwapat, W. The Inertial Sub-Gradient Extra-Gradient Method for a Class of Pseudo-Monotone Equilibrium Problems. Symmetry 2020, 12, 463. [Google Scholar] [CrossRef]
- Hieu, D.V. An inertial-like proximal algorithm for equilibrium problems. Math. Methods Oper. Res. 2018, 88, 399–415. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39. [Google Scholar] [CrossRef]
- Hieu, D.V.; Cho, Y.J.; bin Xiao, Y. Modified extragradient algorithms for solving equilibrium problems. Optimization 2018, 67, 2003–2029. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Alreshidi, N.A.; Kumam, W.; Jirakitpuwapat, W. A Self-Adaptive Extra-Gradient Methods for a Family of Pseudomonotone Equilibrium Programming with Application in Different Classes of Variational Inequality Problems. Symmetry 2020, 12, 523. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Deebani, W.; Kumam, W. Inertial Extra-Gradient Method for Solving a Family of Strongly Pseudomonotone Equilibrium Problems in Real Hilbert Spaces with Application in Variational Inequality Problem. Symmetry 2020, 12, 503. [Google Scholar] [CrossRef]
- Muu, L.D.; Quoc, T.D. Regularization Algorithms for Solving Monotone Ky Fan Inequalities with Application to a Nash-Cournot Equilibrium Model. J. Optim. Theory Appl. 2009, 142, 185–204. [Google Scholar] [CrossRef]
- Kassay, G.; Hai, T.N.; Vinh, N.T. Coupling popov’s algorithm with subgradient extragradient method for solving equilibrium problems. J. Nonlinear Convex Anal. 2018, 19, 959–986. [Google Scholar]
- Liu, Y.; Kong, H. The new extragradient method extended to equilibrium problems. Rev. De La Real Acad. De Cienc. Exactas, Físicas Y Naturales. Ser. A. Matemáticas 2019, 113, 2113–2126. [Google Scholar] [CrossRef]
- Goebel, K.; Reich, S. Uniform convexity. In Hyperbolic Geometry, and Nonexpansive; Marcel Dekker, Inc.: New York, NY, USA, 1984. [Google Scholar]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Tiel, J.V. Convex Analysis: An Introductory Text, 1st ed.; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Ofoedu, E. Strong convergence theorem for uniformly L-Lipschitzian asymptotically pseudocontractive mapping in real Banach space. J. Math. Anal. Appl. 2006, 321, 722–728. [Google Scholar] [CrossRef]
- Heinz, H.; Bauschke, P.L.C. Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2nd ed.; CMS Books in Mathematics; Springer International Publishing: New York, NY, USA, 2017. [Google Scholar]
- Attouch, F.A.H. An Inertial Proximal Method for Maximal Monotone Operators via Discretization of a Nonlinear Oscillator with Damping. Set Valued Var. Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–598. [Google Scholar] [CrossRef]
- Maiorano, A.; Song, Y.; Trovato, M. Dynamics of non-collusive oligopolistic electricity markets. In Proceedings of the 2000 IEEE Power Engineering Society Winter Meeting, Conference Proceedings (Cat. No.00CH37077), Singapore, 23–27 January 2000. [Google Scholar] [CrossRef]
- Hieu, D.V. Convergence analysis of a new algorithm for strongly pseudomontone equilibrium problems. Numer. Algorithms 2017, 77, 983–1001. [Google Scholar] [CrossRef]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).