
Developing a Low-Cost Device for Estimating Air–Water ΔpCO2 in Coastal Environments

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Developing the SEACOW
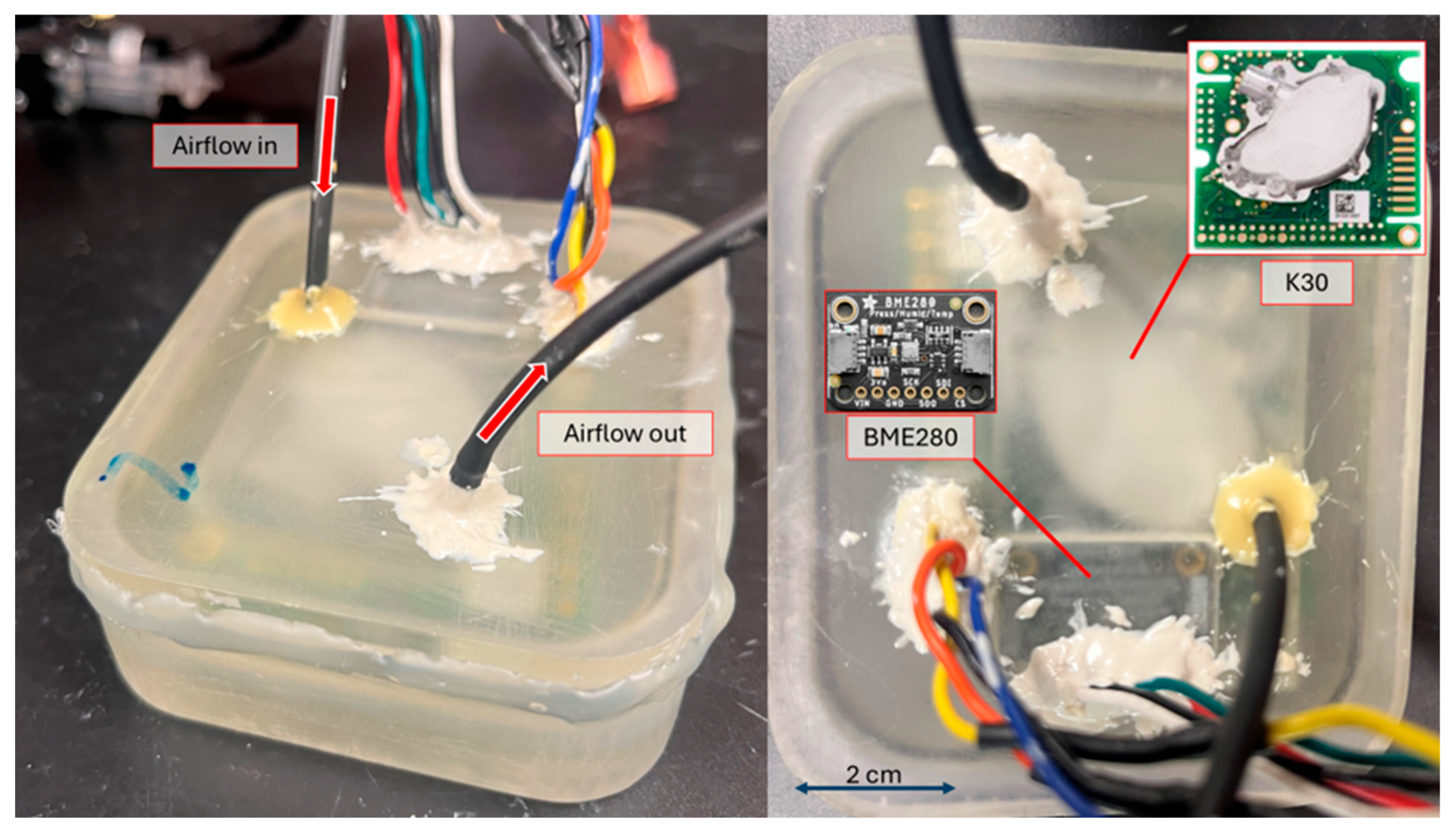
2.1.1. Internal Components
2.1.2. Electronics and Software
2.1.3. Outer Housing
2.2. Characterizing the SEACOW
2.2.1. Air-Side Accuracy
2.2.2. Response Time
2.2.3. Humidity and Pressure Correction
2.3. Laboratory Seagrass Experiment
3. Results
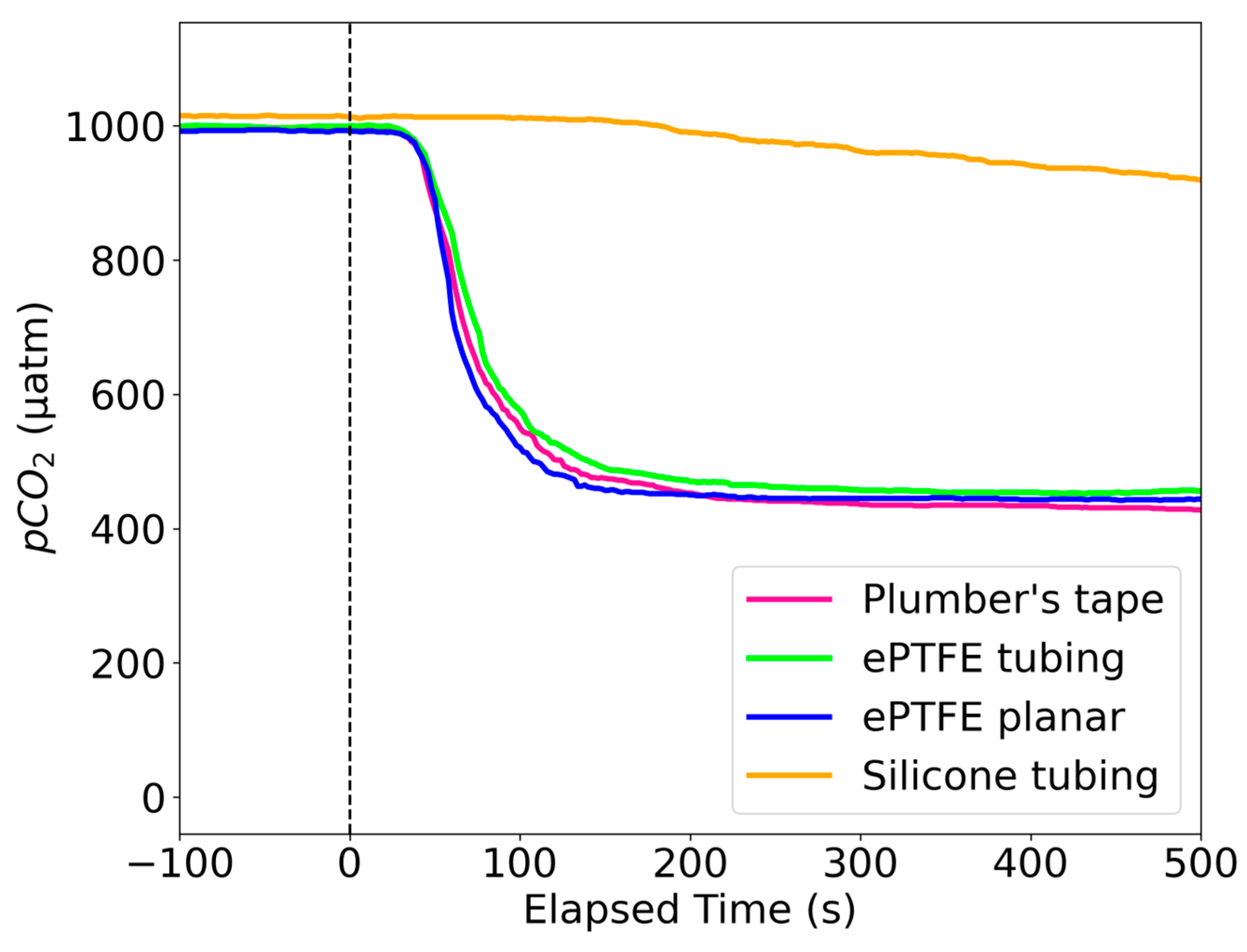
3.1. Response Times of Different Membranes
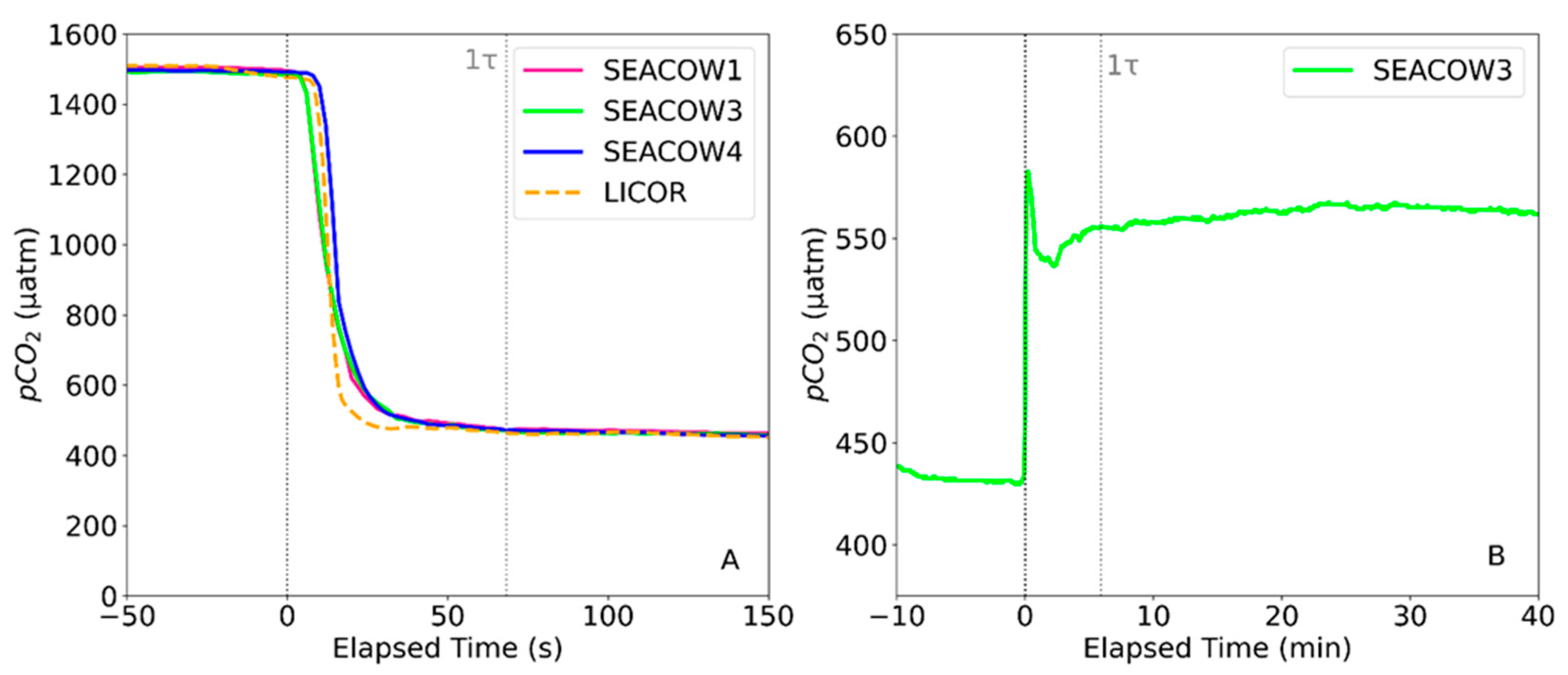
3.2. Air- and Water-Side Response Times
3.3. Air-Side Accuracy
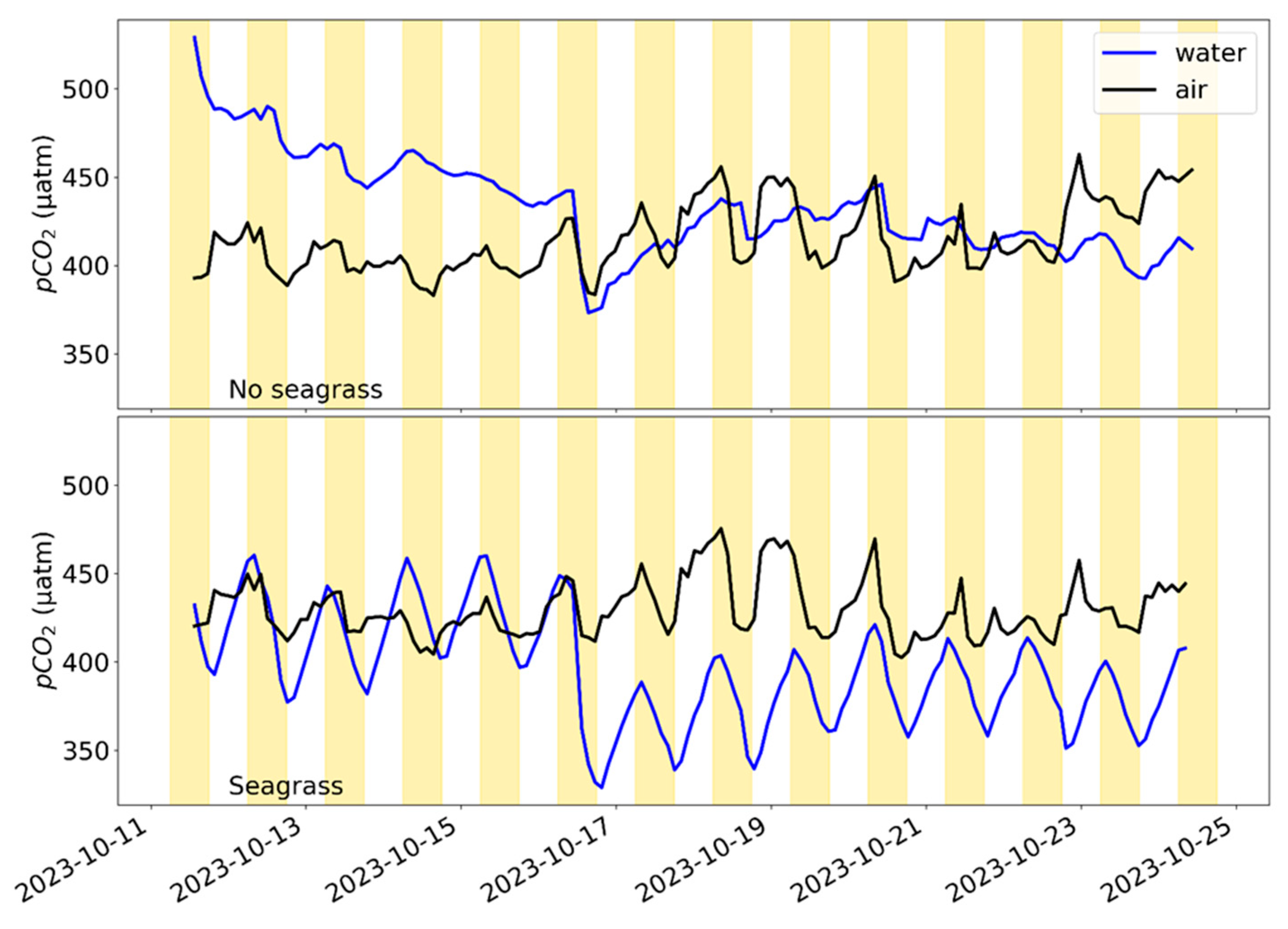
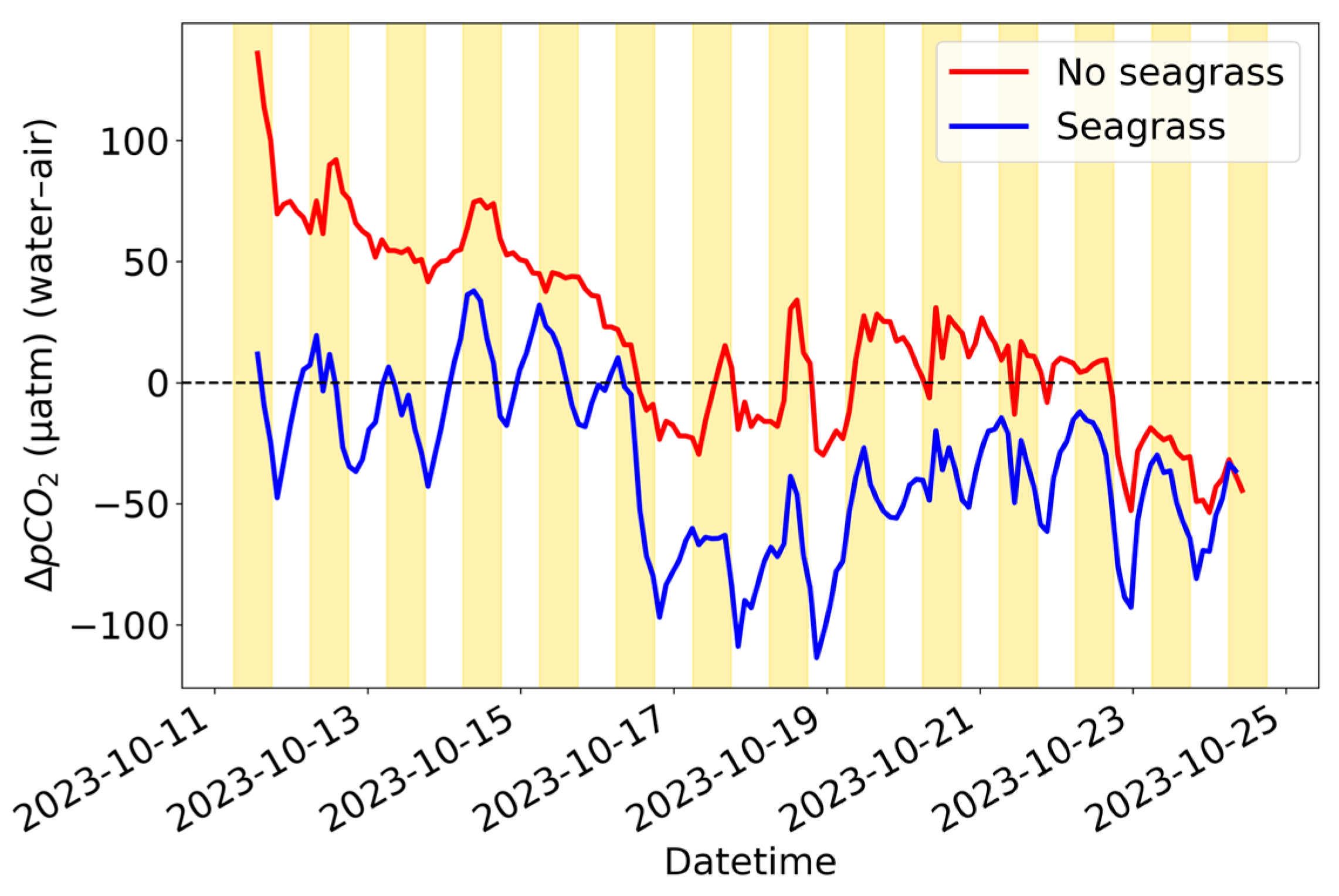
3.4. Seagrass Tank Experiment
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SEACOW | System for Exchange of Atmospheric CO2 with Water |
| ePTFE/PTFE | Expanded Polytetrafluoroethylene |
| NDIR | Non-dispersive infrared |
| UART | Universal asynchronous receiver transmitter |
| DI | Deionized |
| atm | Atmosphere |
Appendix A
- Particle Boron (BRN404XKIT): This is the microcontroller that carries out the commands from the firmware. The Boron has an onboard cellular modem with LTE capabilities, allowing it to upload data directly to a Google spreadsheet during its deployments. It is powered using a rechargeable 3.7 V Li-ion battery.
- Lee Co 3-way solenoid valves (LHLA0531211H): These control the flow of air to switch between measuring the air side and the water side of the instrument.
- Sparkfun motor driver (ROB-14450): This controls the solenoid valves.
- Blue Robotics temperature sensor (BR-100317): This measures the water temperature.
- Adafruit BME 280 sensor (2652): This measures the temperature, pressure, and humidity inside of the K30 housing.
- Adafruit TMP 117 sensor (4821): The measures the temperature on the air side of the instrument.
- Senseair K30 CO2 sensor (030-8-0006): This is the NDIR sensor that is measuring the pCO2.
- Adafruit Powerboost (1944): This converts the 3.3 V output of the Boron to a 5 V output, which is the minimum voltage required for the K30 to function. It also turns on and off the K30 during sleeping periods.
- Adafruit Adalogger Featherwing (2922): The datalogger stores data onto its SD card.
- Diaphragm gas pump (UNMP 05): This moves the air throughout the closed loop system.
- Sparkfun MOSFET power control kit (COM-12959): This allows us to turn the pump on and off in between samples.

Appendix B
- T = temperature = 296.15 K;
- R = 0.0821 (L atm mol−1 K−1);
- P = room pressure = 1 atm;
- C = the desired CO2 concentration in ppm;
- MFCN2 = the mass flow controller for N2 is set at 5 Lpm.
Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set Point (µatm) | SEACOW1 Average Reading (µatm) | SEACOW3 Average Reading (µatm) | SEACOW4 Average Reading (µatm) | LI-850 Average Reading (µatm) | |||
|---|---|---|---|---|---|---|---|
| Pre | Post | Pre | Post | Pre | Post | ||
| 0 | 94 ± 0.78 | −19 ± 0.37 | 6 ± 0.91 | 25 ± 0.89 | 51 ± 0.73 | −30 ± 0.54 | 1.44 ± 0.09 |
| 250 | 369 ± 0.57 | 230 ± 0.52 | 208 ± 0.70 | 233 ± 0.79 | 298 ± 1.82 | 219 ± 1.36 | 238.38 ± 0.20 |
| 500 | 653 ± 0.61 | 484 ± 0.52 | 445 ± 0.88 | 472 ± 0.80 | 561 ± 1.08 | 474 ± 1.00 | 490.90 ± 0.32 |
| 750 | 937 ± 0.87 | 738 ± 0.76 | 690 ± 0.98 | 719 ± 0.94 | 825 ± 2.42 | 726 ± 2.21 | 744.75 ± 0.50 |
| 1000 | 1229 ± 0.61 | 997 ± 0.49 | 941 ± 1.37 | 968 ± 1.30 | 1097 ± 1.42 | 985 ± 1.30 | 999.32 ± 0.59 |
| 1500 | 1798 ± 0.84 | 1505 ± 0.75 | 1464 ± 1.42 | 1493 ± 1.47 | 1633 ± 2.04 | 1496 ± 1.91 | 1508.16 ± 0.72 |
| Dry calibration curves: SEACOW1: K30corrected = 0.89 (K30raw) − 86 (R2 = 1); SEACOW3: K30corrected = 1 (K30raw) + 20 (R2 = 0.99); SEACOW4: K30corrected = 0.95 (K30raw) − 45 (R2 = 1). | |||||||
References
- Friedlingstein, P.; O’Sullivan, M.; Jones, M.W.; Andrew, R.M.; Hauck, J.; Landschützer, P.; Le Quéré, C.; Li, H.; Luijkx, I.T.; Olsen, A. Global carbon budget 2024. Earth Syst. Sci. Data Discuss. 2024, 2024, 1–133. [Google Scholar] [CrossRef]
- Dai, M.; Su, J.; Zhao, Y.; Hofmann, E.E.; Cao, Z.; Cai, W.-J.; Gan, J.; Lacroix, F.; Laruelle, G.G.; Meng, F.; et al. Carbon Fluxes in the Coastal Ocean: Synthesis, Boundary Processes, and Future Trends. Annu. Rev. Earth Planet. Sci. 2022, 50, 593–626. [Google Scholar] [CrossRef]
- Bauer, J.E.; Cai, W.-J.; Raymond, P.A.; Bianchi, T.S.; Hopkinson, C.S.; Regnier, P.A.G. The changing carbon cycle of the coastal ocean. Nature 2013, 504, 61–70. [Google Scholar] [CrossRef]
- Takahashi, T.; Olafsson, J.; Goddard, J.G.; Chipman, D.W.; Sutherland, S. Seasonal variation of CO2 and nutrients in the high-latitude surface oceans: A comparative study. Glob. Biogeochem. Cycles 1993, 7, 843–878. [Google Scholar] [CrossRef]
- Lefèvre, N.; Watson, A.J.; Cooper, D.J.; Weiss, R.F.; Takahashi, T.; Sutherland, S.C. Assessing the seasonality of the oceanic sink for CO2 in the northern hemisphere. Glob. Biogeochem. Cycles 1999, 13, 273–286. [Google Scholar] [CrossRef]
- Gregor, L.; Shutler, J.; Gruber, N. High-resolution variability of the ocean carbon sink. Glob. Biogeochem. Cycles 2024, 38, e2024GB008127. [Google Scholar] [CrossRef]
- Herr, D.; Landis, E. Coastal Blue Carbon Ecosystems. Opportunities for Nationally Determined Contributions; Policy Brief; IUCN: Gland, Switzerland; TNC: Washington, DC, USA, 2016. [Google Scholar]
- Fourqurean, J.W.; Duarte, C.M.; Kennedy, H.; Marbà, N.; Holmer, M.; Mateo, M.A.; Apostolaki, E.T.; Kendrick, G.A.; Krause-Jensen, D.; Mcglathery, K.J.; et al. Seagrass ecosystems as a globally significant carbon stock. Nat. Geosci. 2012, 5, 505–509. [Google Scholar] [CrossRef]
- Macreadie, P.; Baird, M.; Trevathan-Tackett, S.; Larkum, A.; Ralph, P. Quantifying and modelling the carbon sequestration capacity of seagrass meadows—A critical assessment. Mar. Pollut. Bull. 2014, 83, 430–439. [Google Scholar] [CrossRef]
- Resplandy, L.; Hogikyan, A.; Müller, J.; Najjar, R.; Bange, H.W.; Bianchi, D.; Weber, T.; Cai, W.J.; Doney, S.; Fennel, K. A synthesis of global coastal ocean greenhouse gas fluxes. Glob. Biogeochem. Cycles 2024, 38, e2023GB007803. [Google Scholar] [CrossRef]
- Watson, A.J.; Schuster, U.; Shutler, J.D.; Holding, T.; Ashton, I.G.; Landschützer, P.; Woolf, D.K.; Goddijn-Murphy, L. Revised estimates of ocean-atmosphere CO2 flux are consistent with ocean carbon inventory. Nat. Commun. 2020, 11, 4422. [Google Scholar] [CrossRef]
- Takahashi, T.; Sutherland, S.C.; Wanninkhof, R.; Sweeney, C.; Feely, R.A.; Chipman, D.W.; Hales, B.; Friederich, G.; Chavez, F.; Sabine, C. Climatological mean and decadal change in surface ocean pCO2, and net sea–air CO2 flux over the global oceans. Deep Sea Res. Part II Top. Stud. Oceanogr. 2009, 56, 554–577. [Google Scholar]
- Rosentreter, J.A. Water-air gas exchange of CO2 and CH4 in coastal wetlands. In Carbon Mineralization in Coastal Wetlands; Elsevier: Amsterdam, The Netherlands, 2022; pp. 167–196. [Google Scholar]
- Wanninkhof, R. Relationship between gas exchange and wind speed over the ocean. J. Geophys. Res. 1992, 97, 7373–7381. [Google Scholar] [CrossRef]
- Wanninkhof, R.; Asher, W.E.; Ho, D.T.; Sweeney, C.; McGillis, W.R. Advances in quantifying air-sea gas exchange and environmental forcing. Annu. Rev. Mar. Sci. 2009, 1, 213–244. [Google Scholar] [CrossRef] [PubMed]
- Hunt, C.W.; Snyder, L.; Salisbury, J.E.; Vandemark, D.; Mcdowell, W.H. SIPCO2: A simple, inexpensive surface water pCO2 sensor. Limnol. Oceanogr. Methods 2017, 15, 291–301. [Google Scholar] [CrossRef]
- Wall, C.M. Autonomous In Situ Measurements of Estuarine Surface PCO2: Instrument Development and Initial Estuarine Observations. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 2014. [Google Scholar]
- Graziani, S.; Beaubien, S.E.; Bigi, S.; Lombardi, S. Spatial and temporal pCO2 marine monitoring near Panarea Island (Italy) using multiple low-cost GasPro sensors. Environ. Sci. Technol. 2014, 48, 12126–12133. [Google Scholar] [CrossRef]
- Ge, X.; Kostov, Y.; Henderson, R.; Selock, N.; Rao, G. A low-cost fluorescent sensor for pCO2 measurements. Chemosensors 2014, 2, 108–120. [Google Scholar] [CrossRef]
- Pan, C.; Patel, V.; Gewirtzman, J.; Richardson, I.; Dubey, R.; Caylor, K.; Dollar, A.; Forbes, E. Fluxbot: The Next Generation-Design and Validation of a Wireless, Open-Source Mechatronic CO2 Flux Sensing Chamber. In Proceedings of the 7th ACM SIGCAS/SIGCHI Conference on Computing and Sustainable Societies, New Delhi, India, 8–11 July 2024; pp. 85–96. [Google Scholar]
- Sabine, C.; Sutton, A.; Mccabe, K.; Lawrence-Slavas, N.; Alin, S.; Feely, R.; Jenkins, R.; Maenner, S.; Meinig, C.; Thomas, J.; et al. Evaluation of a New Carbon Dioxide System for Autonomous Surface Vehicles. J. Atmos. Ocean. Technol. 2020, 37, 1305–1317. [Google Scholar] [CrossRef]
- Nicholson, D.P.; Michel, A.P.M.; Wankel, S.D.; Manganini, K.; Sugrue, R.A.; Sandwith, Z.O.; Monk, S.A. Rapid Mapping of Dissolved Methane and Carbon Dioxide in Coastal Ecosystems Using the ChemYak Autonomous Surface Vehicle. Environ. Sci. Technol. 2018, 52, 13314–13324. [Google Scholar] [CrossRef]
- Sutton, A.J.; Sabine, C.L.; Maenner-Jones, S.; Lawrence-Slavas, N.; Meinig, C.; Feely, R.A.; Mathis, J.T.; Musielewicz, S.; Bott, R.; Mclain, P.D.; et al. A high-frequency atmospheric and seawater pCO2 data set from 14 open-ocean sites using a moored autonomous system. Earth Syst. Sci. Data 2014, 6, 353–366. [Google Scholar] [CrossRef]
- Johnson, M.S.; Billett, M.F.; Dinsmore, K.J.; Wallin, M.; Dyson, K.E.; Jassal, R.S. Direct and continuous measurement of dissolved carbon dioxide in freshwater aquatic systems-method and applications. Ecohydrology 2009, 3, 68–78. [Google Scholar] [CrossRef]
- Yasuda, T.; Yonemura, S.; Tani, A. Comparison of the Characteristics of Small Commercial NDIR CO2 Sensor Models and Development of a Portable CO2 Measurement Device. Sensors 2012, 12, 3641–3655. [Google Scholar] [CrossRef] [PubMed]
- Martin, C.R.; Zeng, N.; Karion, A.; Dickerson, R.R.; Ren, X.; Turpie, B.N.; Weber, K.J. Evaluation and environmental correction of ambient CO2 measurements from a low-cost NDIR sensor. Atmos. Meas. Tech. 2017, 10, 2383–2395. [Google Scholar] [CrossRef] [PubMed]
- Senseair AB. Modbus on Senseair K30, Senseair K33 and eSENSE; Document TDE2336; Senseair AB: Delsbo, Sweden, 2023; 19p. [Google Scholar]
- LI-COR. Maintenance on LI-850 and LI-830 Analyzers. Available online: https://www.licor.com/support/LI-850/topics/maintenance.html (accessed on 16 July 2024).
- Mazzotti, F.J.; Pearlstine, L.G.; Chamberlain, R.; Barnes, T.; Chartier, K.; DeAngelis, D. Stressor Response Models for Seagrasses, Halodule Wrightii and Thalassia Testudnium; University of Florida, Florida Lauderdale Research and Education Center: Fort Lauderdale, FL, USA, 2007; p. 19. [Google Scholar]
- Dickson, A.G.; Sabine, C.L.; Christian, J.R. Guide To Best Practices for Ocean CO2 Measurements; North Pacific Marine Science Organization: Sidney, BC, Canada, 2007. [Google Scholar]
- Van Heuven, S.; Pierrot, D.; Rae, J.; Lewis, E.; Wallace, D. MATLAB Program Developed for CO2 System Calculations; Carbon Dioxide Information Analysis Center (CDIAC): Oak Ridge, TN, USA, 2011. [Google Scholar]
- Farquhar, E.; Bresnahan, P.; Tydings, M.; Portelli, D. COAST-Lab/SEACOW_Public: V1.0.1. 2025. Available online: https://zenodo.org/records/15122776 (accessed on 2 April 2025).
- Fujita, K.; Hikami, M.; Suzuki, A.; Kuroyanagi, A.; Sakai, K.; Kawahata, H.; Nojiri, Y. Effects of ocean acidification on calcification of symbiont-bearing reef foraminifers. Biogeosciences 2011, 8, 2089–2098. [Google Scholar] [CrossRef]
- Körtzinger, A.; Send, U.; Lampitt, R.; Hartman, S.; Wallace, D.W.; Karstensen, J.; Villagarcia, M.; Llinás, O.; DeGrandpre, M. The seasonal pCO2 cycle at 49 N/16.5 W in the northeastern Atlantic Ocean and what it tells us about biological productivity. J. Geophys. Res. Ocean. 2008, 113, C04020. [Google Scholar] [CrossRef]
- Bastviken, D.; Sundgren, I.; Natchimuthu, S.; Reyier, H.; Gålfalk, M. Cost-efficient approaches to measure carbon dioxide (CO2) fluxes and concentrations in terrestrial and aquatic environments using mini loggers. Biogeosciences 2015, 12, 3849–3859. [Google Scholar] [CrossRef]
- Robison, A.L.; Koenig, L.E.; Potter, J.D.; Snyder, L.E.; Hunt, C.W.; McDowell, W.H.; Wollheim, W.M. Lotic-SIPCO2: Adaptation of an open-source CO2 sensor system and examination of associated emission uncertainties across a range of stream sizes and land uses. Limnol. Oceanogr. Methods 2024, 22, 191–207. [Google Scholar] [CrossRef]
- Lee, D.J.J.; Kek, K.T.; Wong, W.W.; Mohd Nadzir, M.S.; Yan, J.; Zhan, L.; Poh, S.C. Design and optimization of wireless in-situ sensor coupled with gas–water equilibrators for continuous pCO2 measurement in aquatic environments. Limnol. Oceanogr. Methods 2022, 20, 500–513. [Google Scholar] [CrossRef]


| Characterization Parameter | Value |
|---|---|
| Accuracy | ±2.5% of LI-850’s readings |
| Air-side 5τ time | 5.7 min |
| Water-side 5τ time | ~30 min |
| Power draw | 185 mW |
| Drierite budget | 162 g per 5 days |
| Temperature range | 5–40 °C |
| Cost in parts | ~1400 USD |
| Github design files [32] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farquhar, E.B.; Bresnahan, P.J.; Tydings, M.; Jarvis, J.C.; Whitehead, R.F.; Portelli, D. Developing a Low-Cost Device for Estimating Air–Water ΔpCO2 in Coastal Environments. Sensors 2025, 25, 3547. https://doi.org/10.3390/s25113547
Farquhar EB, Bresnahan PJ, Tydings M, Jarvis JC, Whitehead RF, Portelli D. Developing a Low-Cost Device for Estimating Air–Water ΔpCO2 in Coastal Environments. Sensors. 2025; 25(11):3547. https://doi.org/10.3390/s25113547
Chicago/Turabian StyleFarquhar, Elizabeth B., Philip J. Bresnahan, Michael Tydings, Jessie C. Jarvis, Robert F. Whitehead, and Dan Portelli. 2025. "Developing a Low-Cost Device for Estimating Air–Water ΔpCO2 in Coastal Environments" Sensors 25, no. 11: 3547. https://doi.org/10.3390/s25113547
APA StyleFarquhar, E. B., Bresnahan, P. J., Tydings, M., Jarvis, J. C., Whitehead, R. F., & Portelli, D. (2025). Developing a Low-Cost Device for Estimating Air–Water ΔpCO2 in Coastal Environments. Sensors, 25(11), 3547. https://doi.org/10.3390/s25113547