Damage information can be extracted from an impact AE wave packet through multi-angle interpretation under the effect of the low-frequency–thickness product, according to the above-stated conclusions. These conclusions were successively verified by processing experimental data on plate structure damage based on the proposed technical route. Three tests were conducted: the first test aimed to verify the AE mode generated by plate structure extrusion, while the second and third ones were plate structure impact tests. The data from the last two tests were then interpreted with respect to various aspects based on the proposed technical route; this enabled the assessment of the feasibility of extracting -mode information from AEs as an indicator of damage.
4.1. Analysis of the AE of Plate Impact Damage
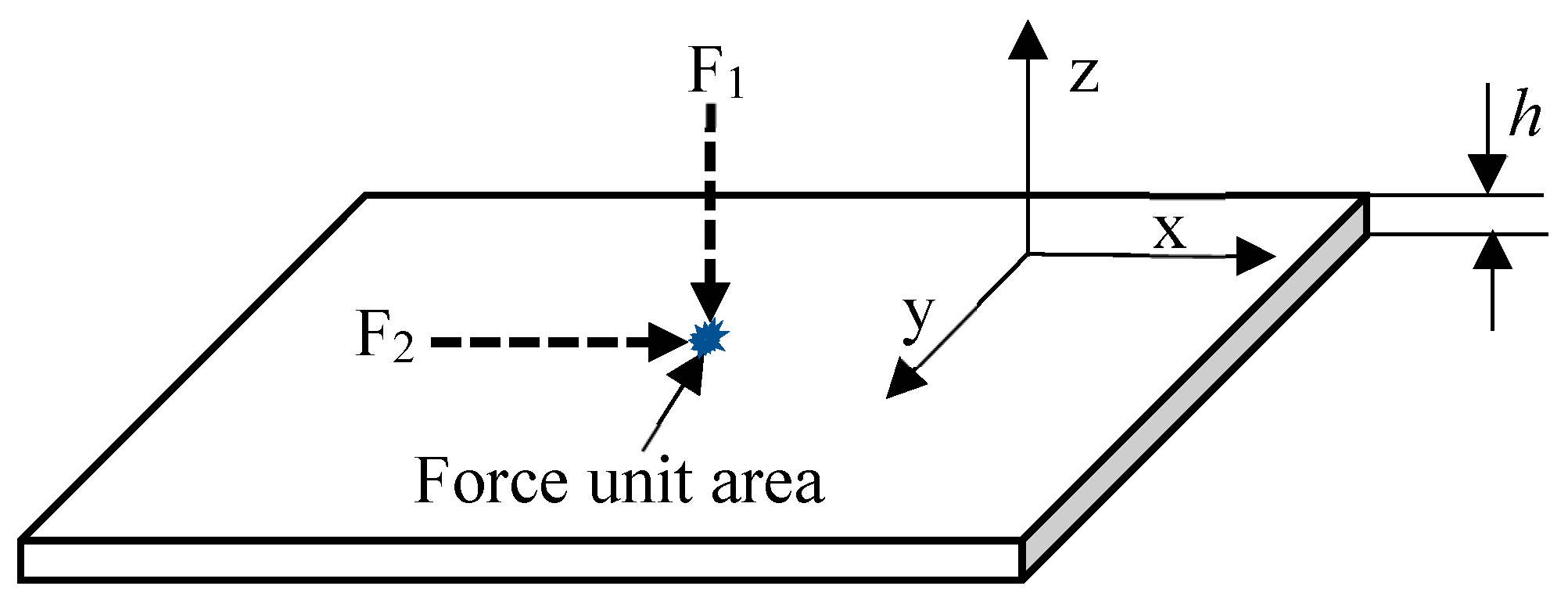
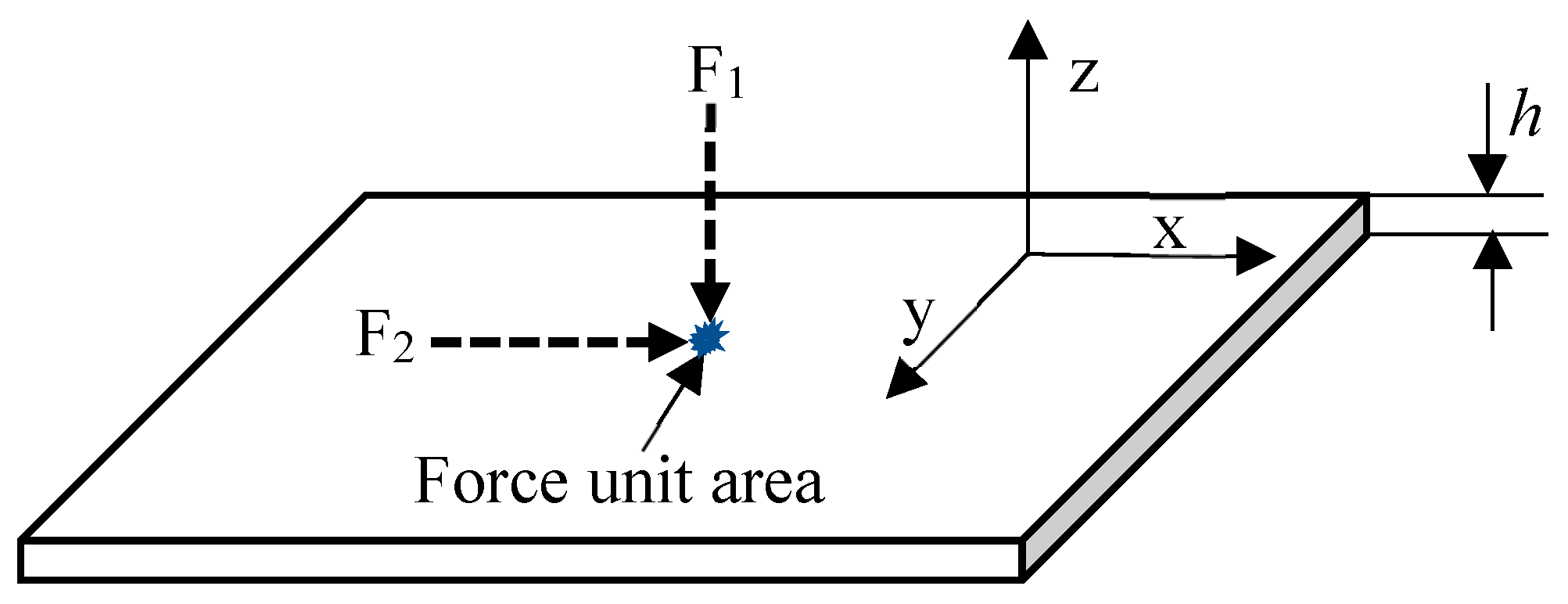
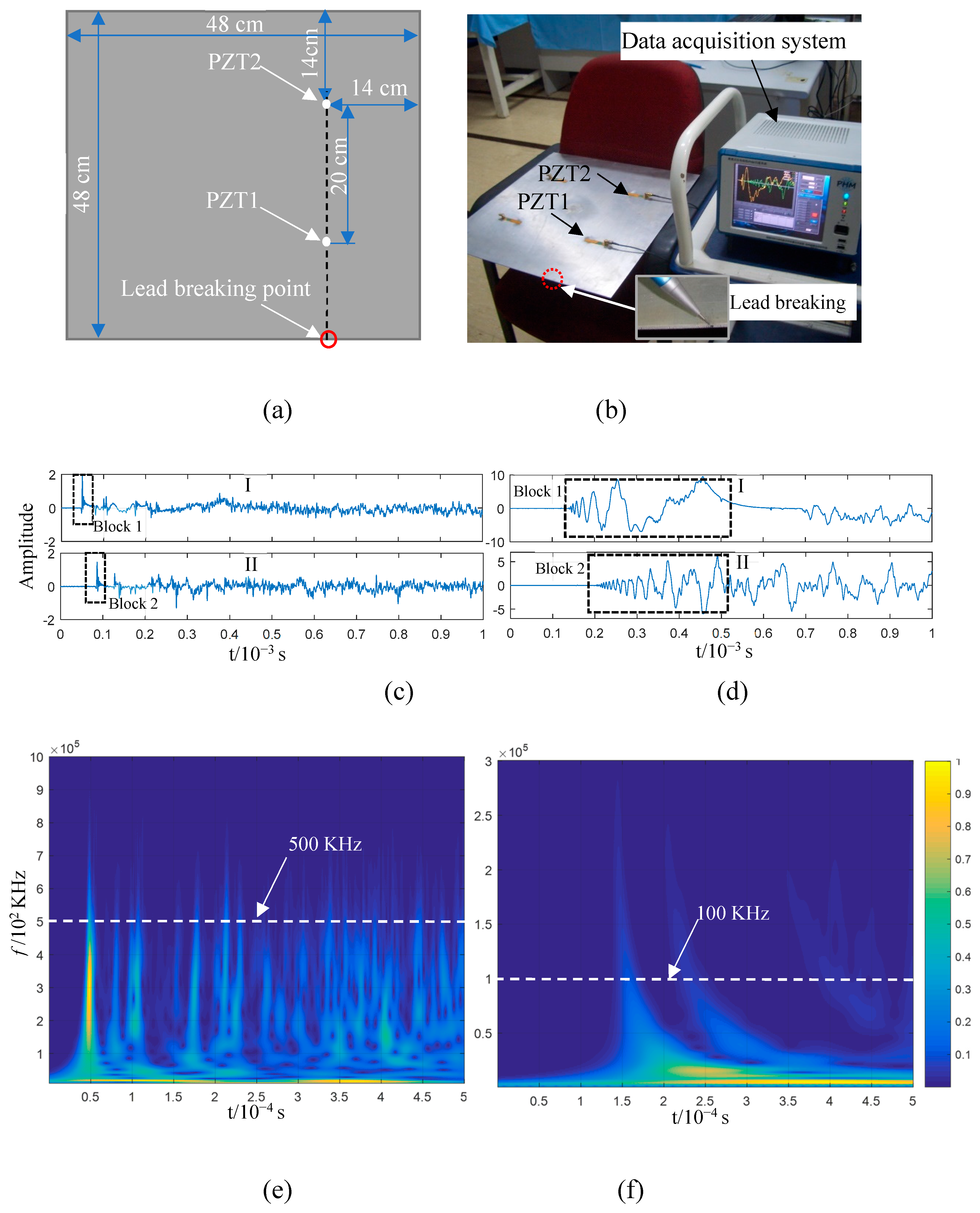
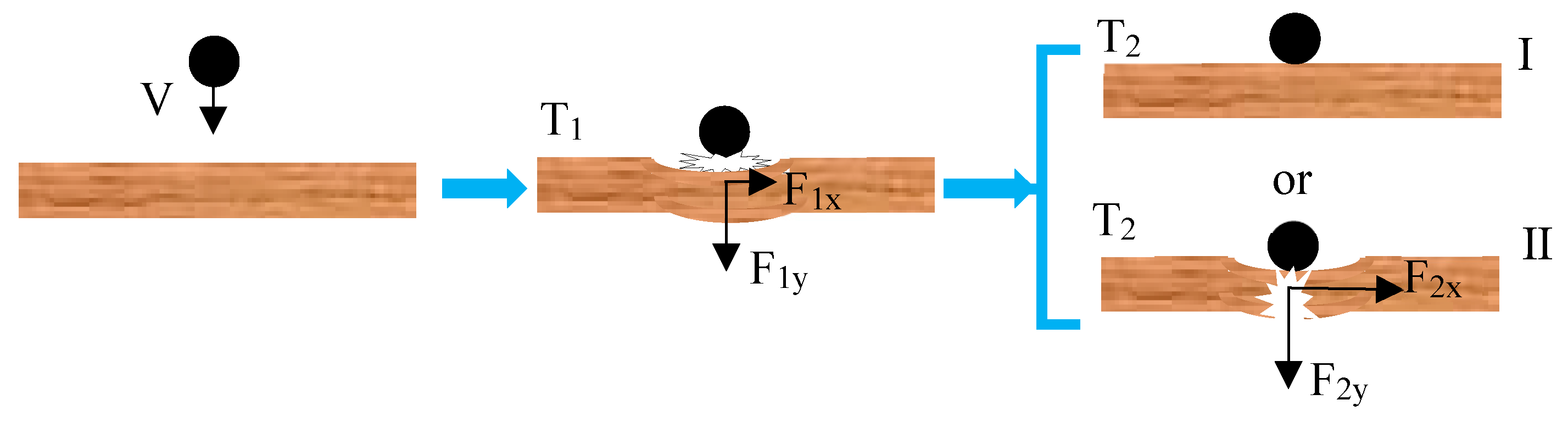
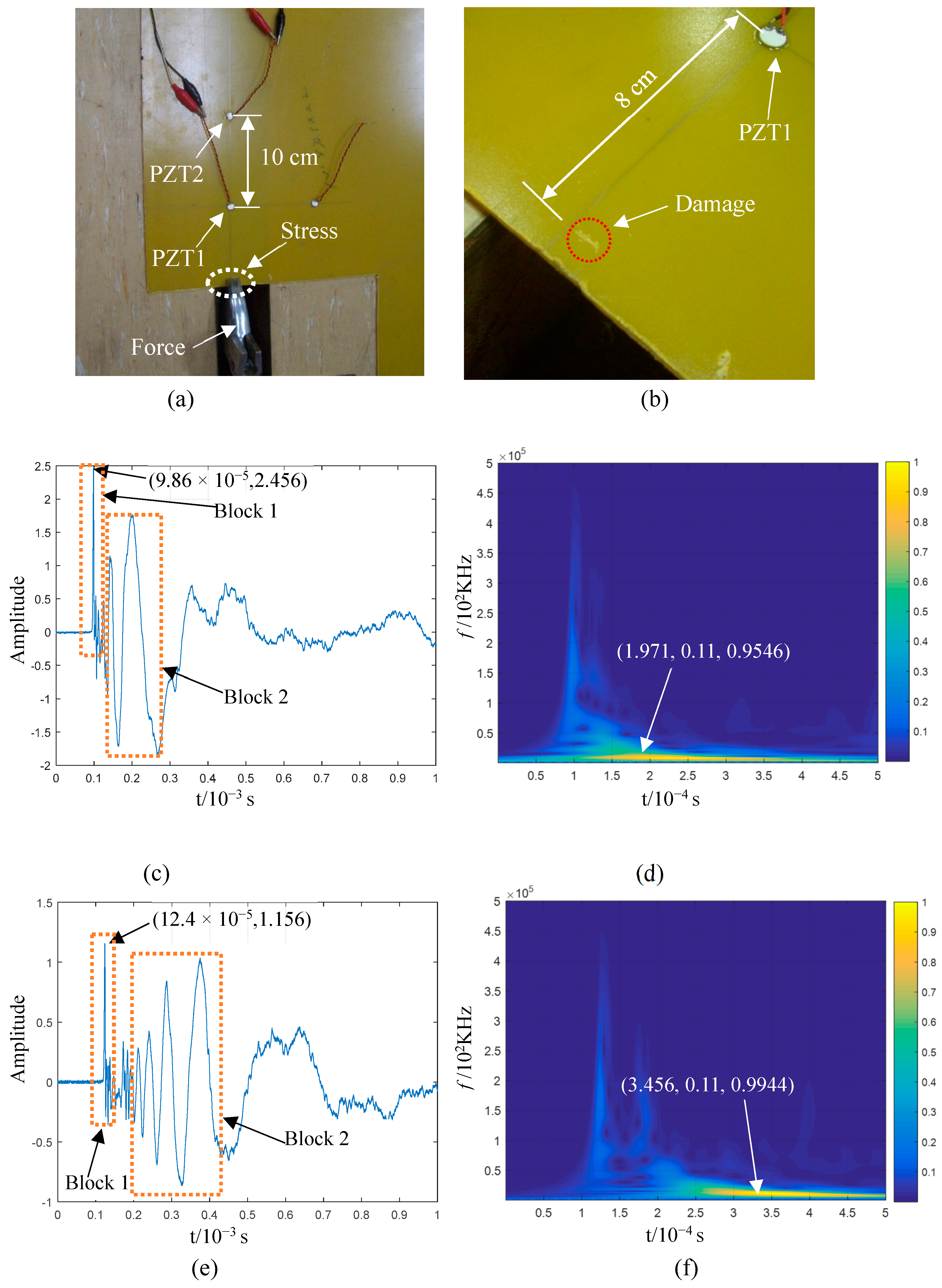
The AEs generated by impact damage inflicted on the plate structure were observed since it they are related to the feasibility of the proposed technical route. The damage-induced AE results from the fracturing of the plate structure, according to the impact damage process described above. Hence, the analysis of the AE generated by impact damage is equivalent to the direct analysis of the AE generated by material fracture. The deformation and extrusion of the plate structure, with local absorption of impact kinetic energy, were simulated in a test under the application of a local force; to eliminate the interference caused by OP, the applied force was close to the static state. The AEs that propagated in the plate resulted from its rupture, separation, and fracture, and these characteristics are similar to the damage-induced AEs caused by impacts. A 2 mm thick epoxy fibreglass plate was tested by using PZTs as sensors (
Figure 7); PZT1 was placed 10 cm away from PZT2, and the force area was located along the extension line of the two PZTs.
Local damage occurred after the plate structure’s edge, which was roughly 8 cm away from PZT1, was stressed (
Figure 7b). The AE signals collected by PZT1 and PZT2 are shown in
Figure 7c,e; the waveform indicated by Block 1 is a shock waveform that remained almost unchanged during its propagation from PZT1 to PZT2. Then, the first 5000 points of these signals were taken for the wavelet time–frequency analysis, and the results are shown in
Figure 7d,f. The frequency components of the impact waveform are distributed in the frequency range below 500 kHz. If the maximum points of the two impact wave packets are taken as the reference points, their corresponding propagation time is 25.4 μs. With a propagation distance of 10 cm, the calculated propagation speed of the wave packet is ~3900 m/s. The shock wave packet indicated by Block 1 in
Figure 7c,e is a part of the
mode from the perspectives of wave propagation change,
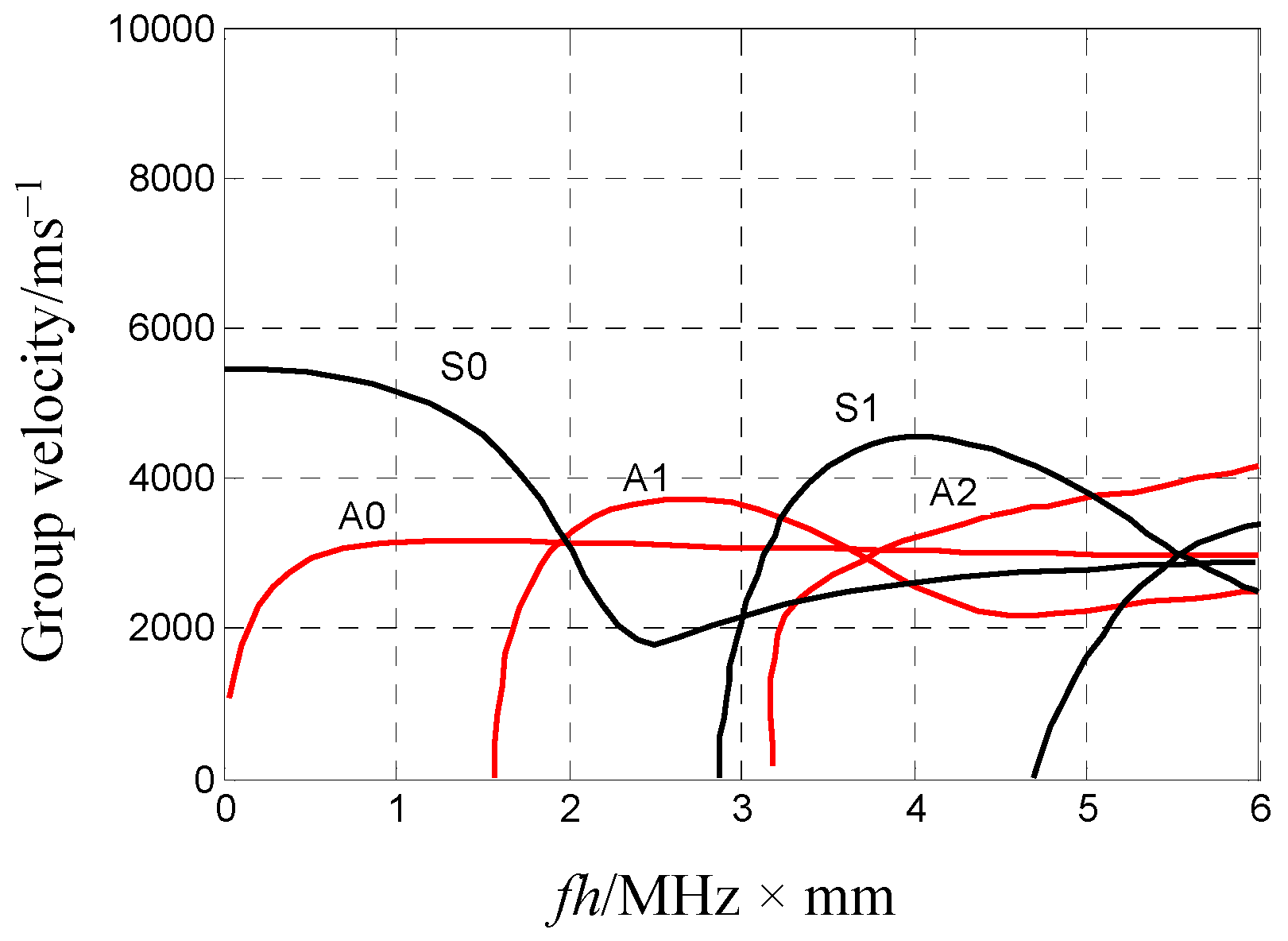
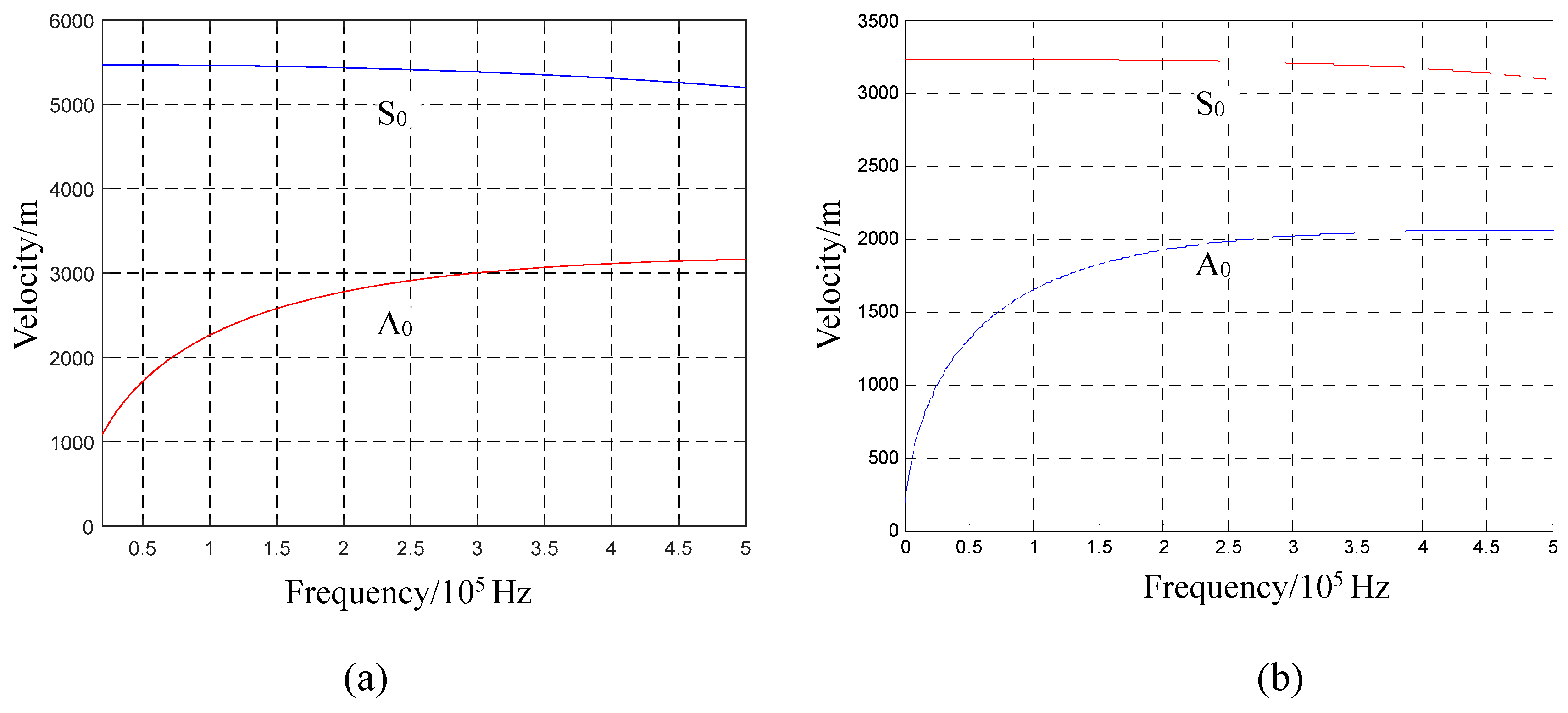
, and wave velocity. The measured wave velocity (3900 m/s) in this mode is rather large (similar to the wave velocity in the mode cut-off range in
Figure 3b) because the AE’s acoustic source was not strictly in a straight line with respect to the two sensors.
Figure 7b shows that the damaged area deviating from the straight line of the two sensors resulted from the force area deviation due to uneven gripping. Moreover, the damage was inflicted over an area; thus, even if it passed through the straight line between the two sensors, the location of the acoustic source on this line could not be strictly guaranteed. Therefore, the time difference from the measured wave packet to the two sensors is less than the theoretical time difference, resulting in a higher calculated velocity. The anisotropy of the composite materials in the epoxy plate is another reason for this; although the propagation velocity of the Lamb wave in the plate can be approximately isotropic, it differs between different propagation directions.
The waves indicated by Block 2 in
Figure 7c,e represent propagation dispersion, and the corresponding propagation speed decreased with the decline in frequency; this behaviour is consistent with the feature of the
mode under the influence of a low-frequency–thickness product (shown in
Figure 3b). The propagation velocity of the wave in Block 2 was then estimated for further verification. The local maximum of the time–frequency curve was set as the reference point by considering the points with a frequency of 11 KHz, which are the two points marked in
Figure 7d,f. The time difference between the two points is ~1.485 μs, with a propagation distance of 10 cm. Further, the wave velocity is ~670 m/s. The speed approaches the wave velocity of 680 m/s, corresponding to 11 KHz (
Figure 3b). The dispersion characteristics and wave velocity prove that the mode in Box 2 is
.
According to the above test, there exist and modes in the when the 2 mm thick epoxy fibreglass plate is partially fractured by the extrusion material. Further, both modes exhibit obvious waveforms. The results show that the damage caused by the local extrusion of the plate structure has the comprehensive characteristics of multiple damage types, and the resulting force exists in two directions simultaneously; no force is absolutely dominant in a given direction. Therefore, the conclusion concerning the simultaneous existence of and modes in generated through the impact damage of the thin plate structure is consistent with practical situations.
4.2. Extraction of Damage Information from Impact AE in Thin Plate Structures
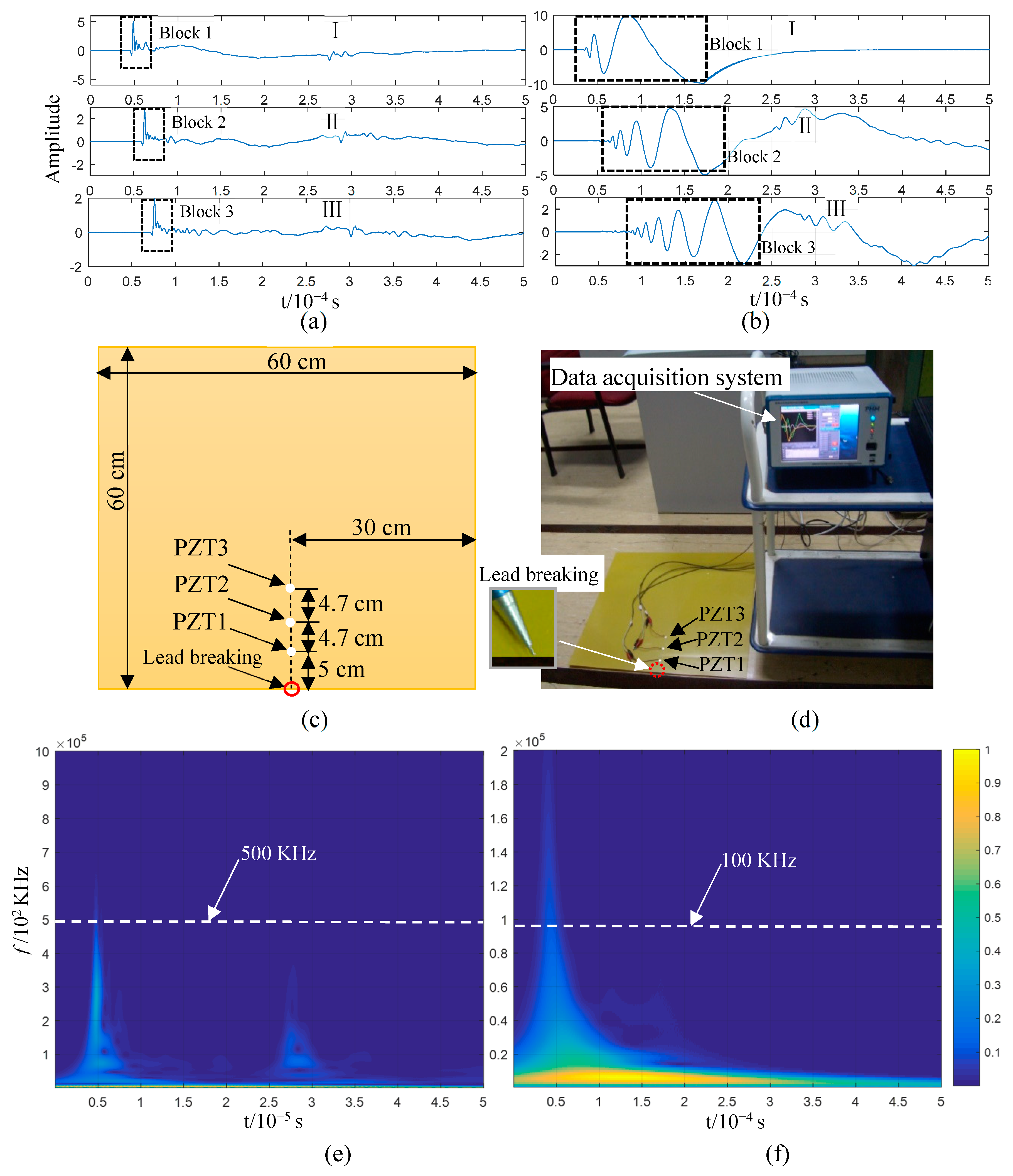
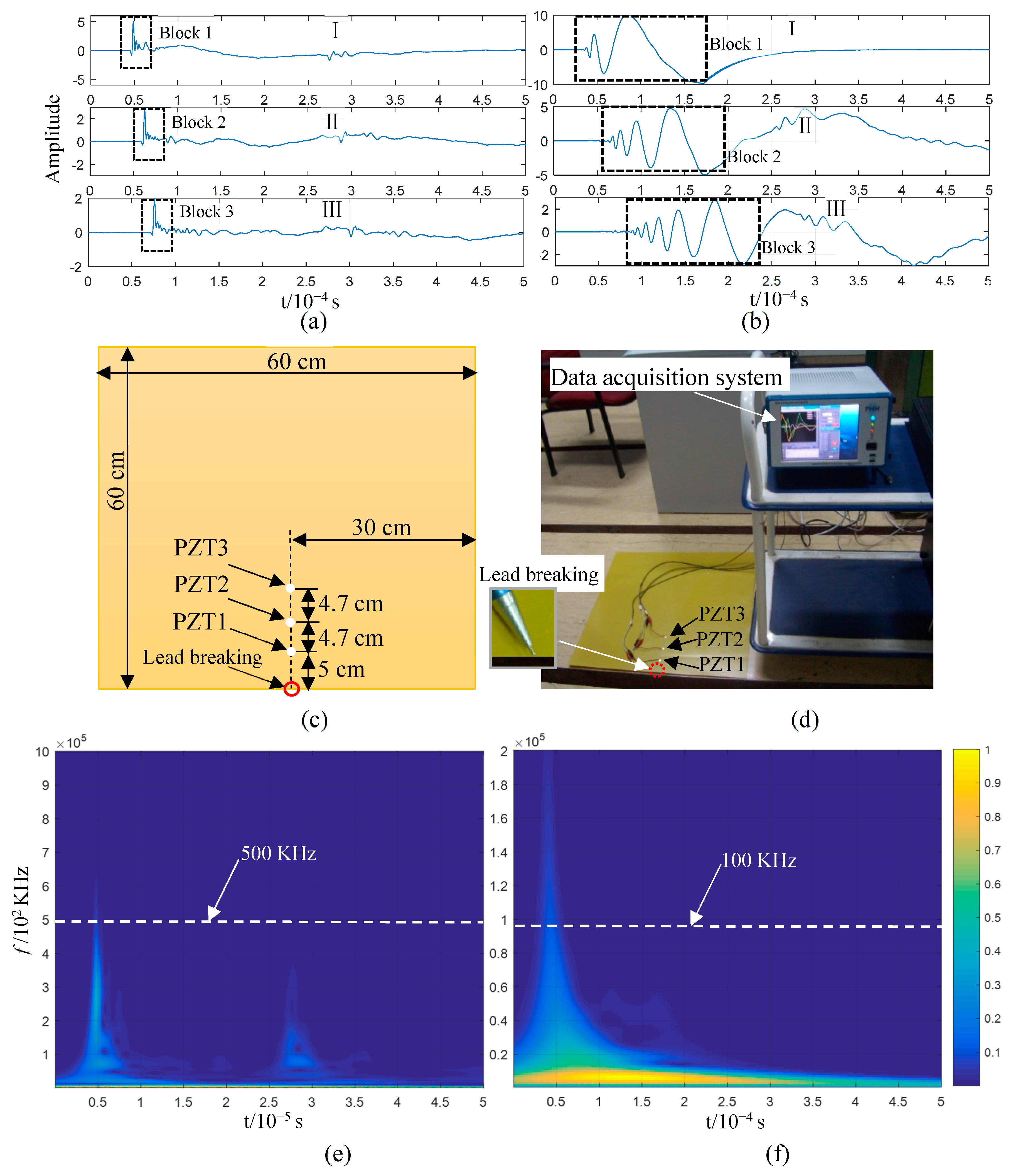
The above-mentioned results show that the impact damage of a thin plate structure is caused by a combination of AE modes. Two tests were successively conducted, one without damage in the impact and the other with impact damage. Then, by processing the test data according to the proposed technical route, the
mode information was extracted from the impact AE to diagnose whether there was damage. The impact non-damage test layout is displayed in
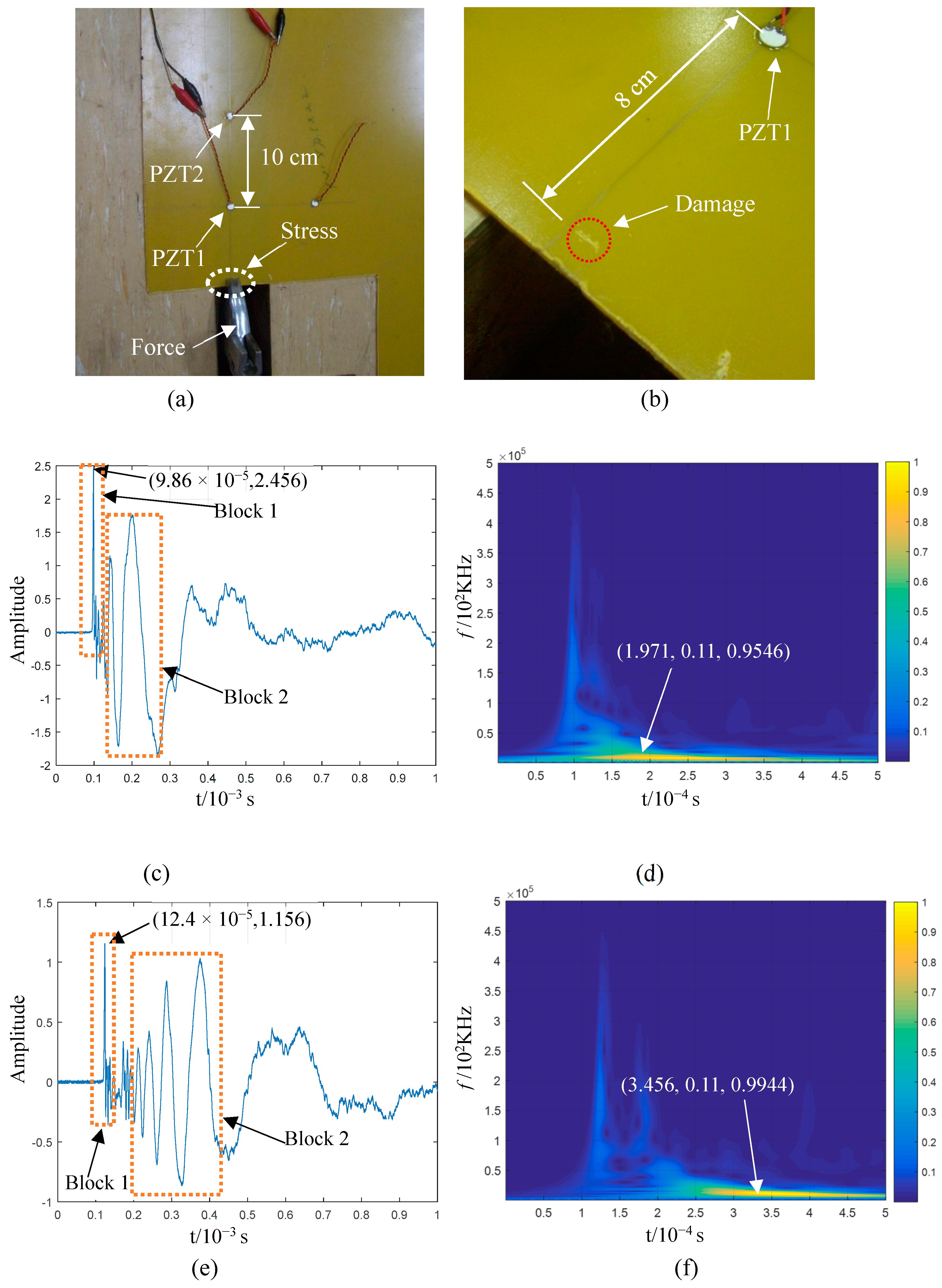
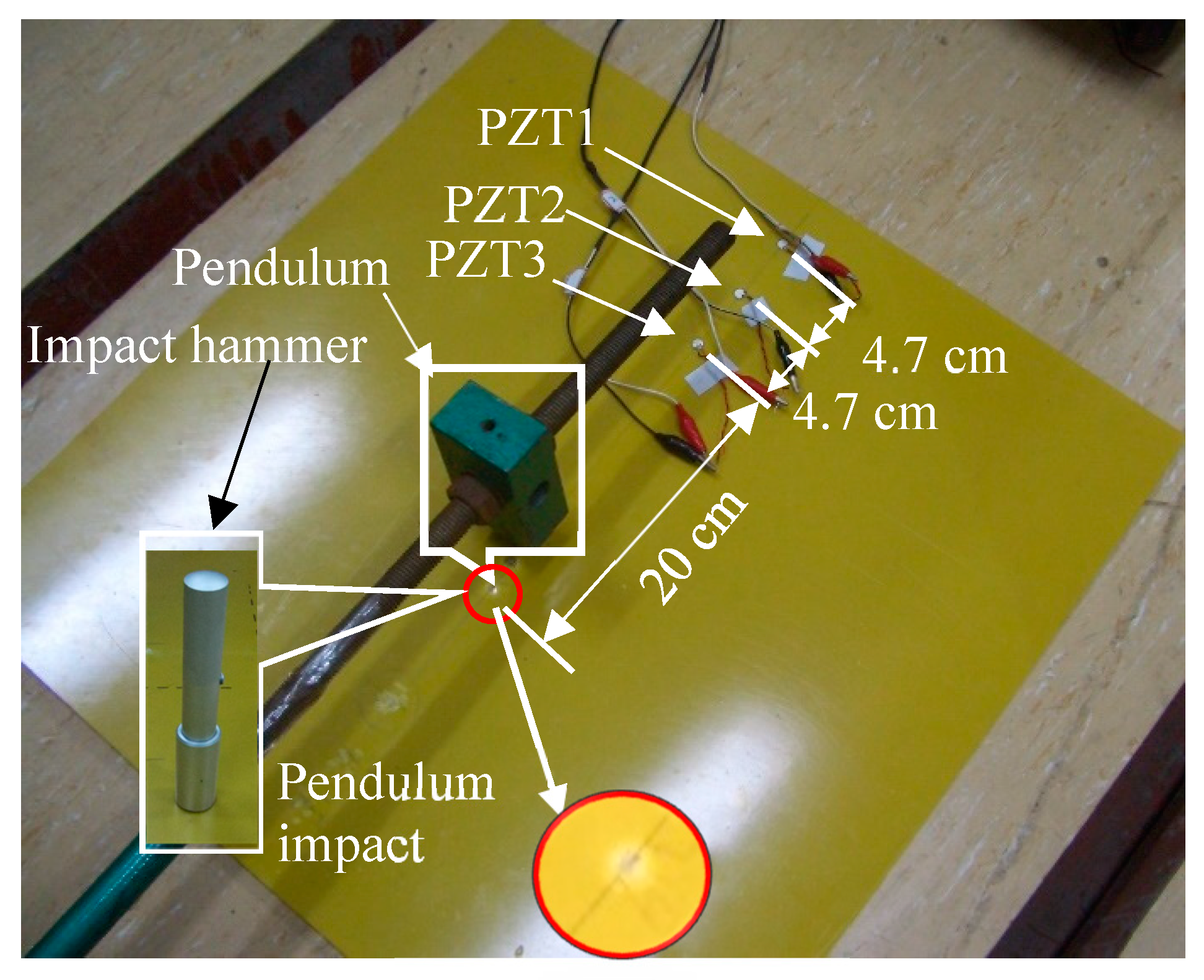
Figure 5b. The tested epoxy fibreglass plate had a thickness of 2 mm; the impact point was 20 cm away from PZT3 on the straight line between the three PZTs, which were spaced 4.7 cm apart. The sampling rate was 10
7, with 10
4 sampling points. An impact hammer was used in the first test (
Figure 8). Due to the light weight of the hammer, no damage was visually observed at the impact point.
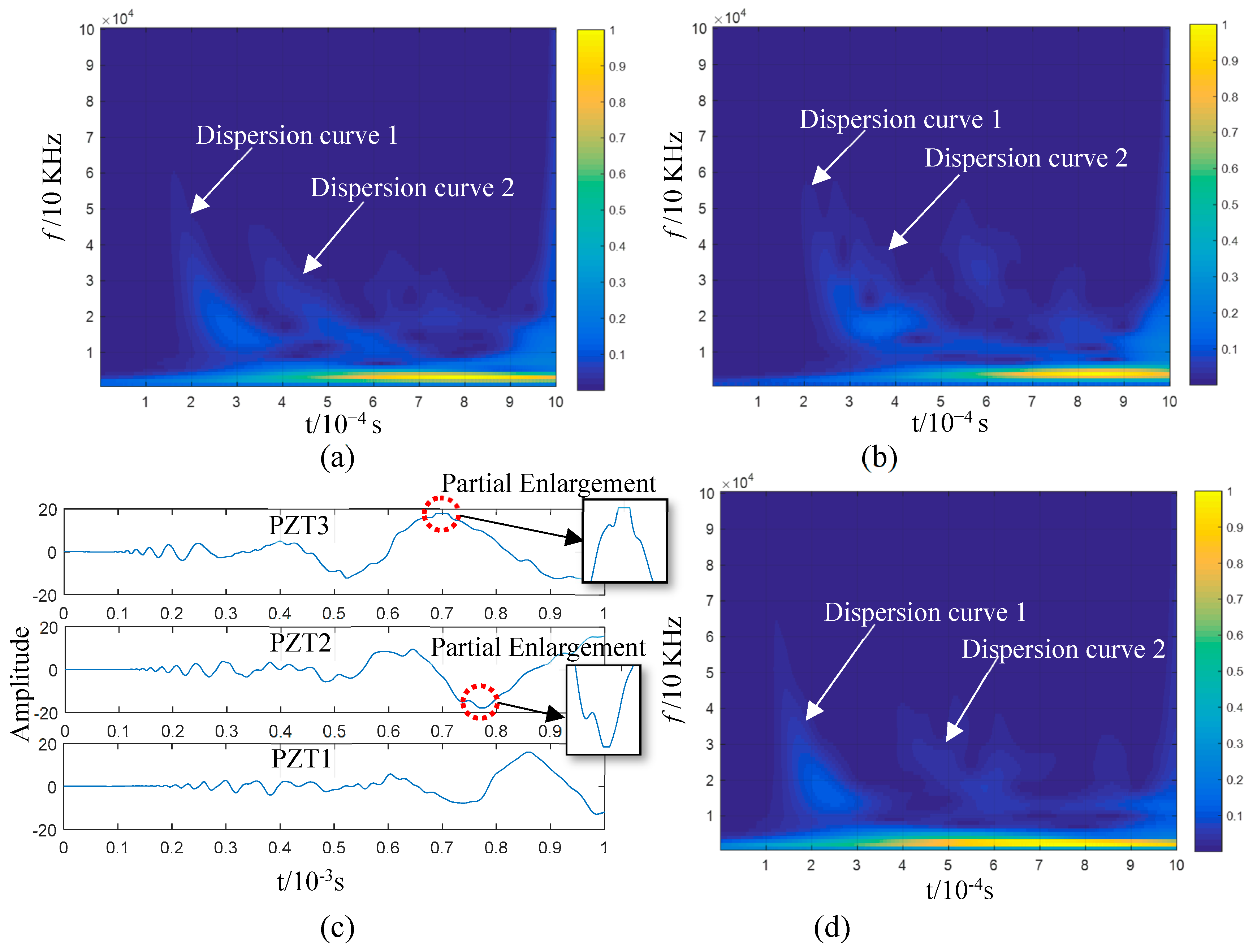
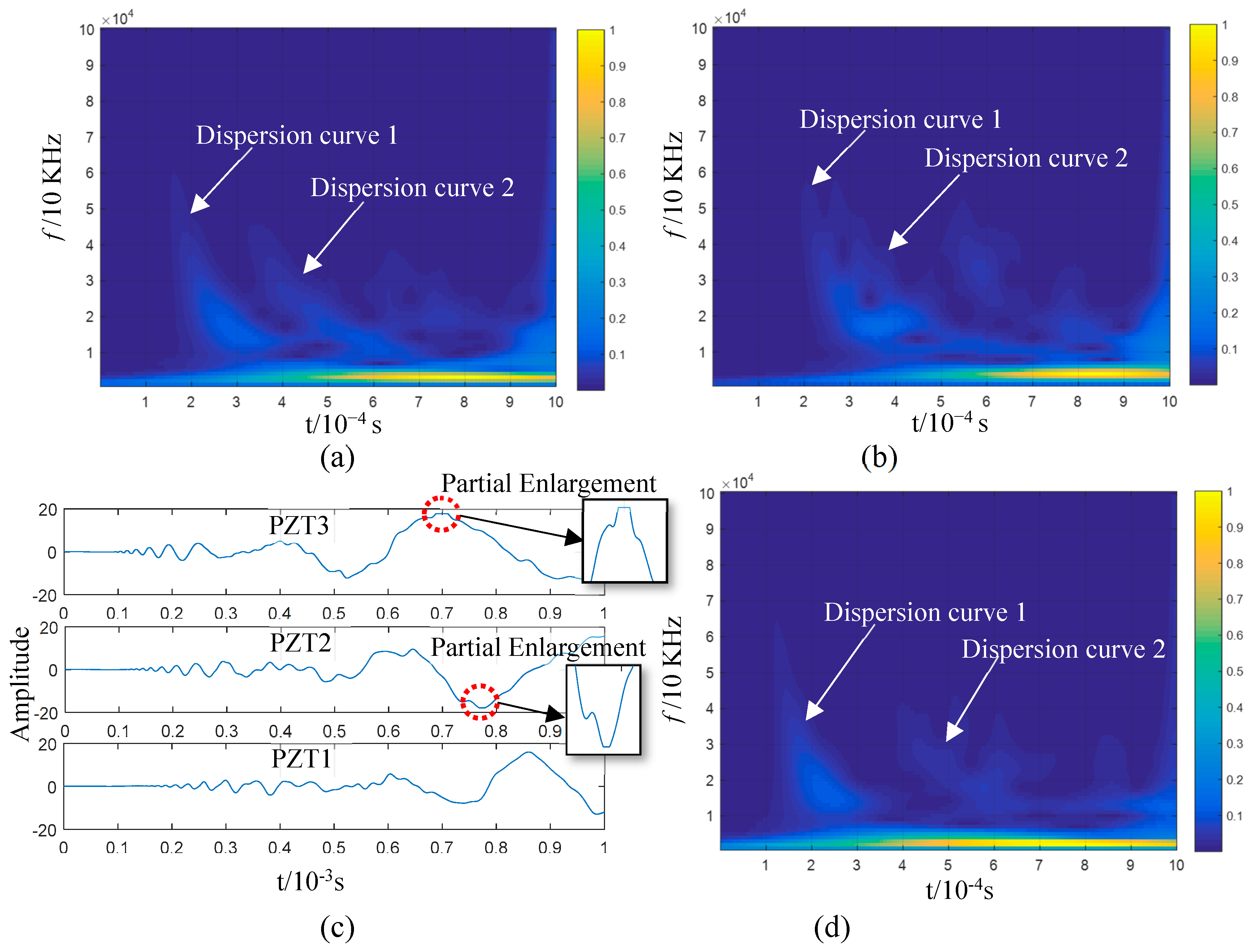
The resulting AE is shown in
Figure 9a. No impact damage was observed on the plate structure through visual inspection, although the AE amplitude exceeded the voltage input range of the detection system (as shown in the insets of
Figure 9a). The wavelet time–frequency analysis (
Figure 9b,d) showed the dispersion characteristics of the wave in the signals collected by all the PZTs. However, the
-mode waveform could not be identified in the time domain and time–frequency plots. The high-frequency components of the AE’s
mode were abundant according to the above analysis. Those in
Figure 9a could be extracted to suppress the interference of low-frequency waves. On this basis, the mode information of the impact AEs could be analysed. The lower frequency limit of high-pass zero-phase filtering was set as 100 kHz. The filtering results are shown in
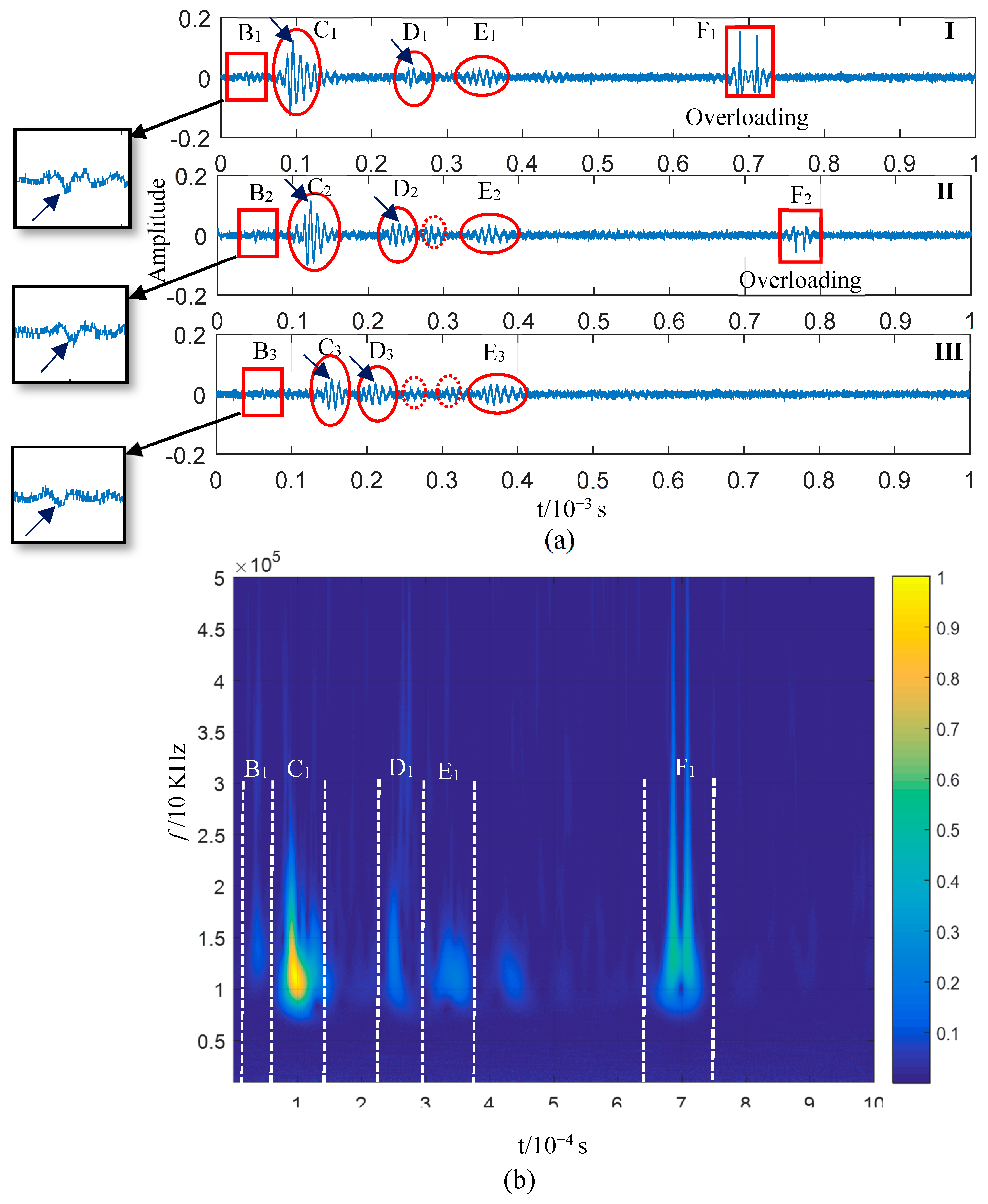
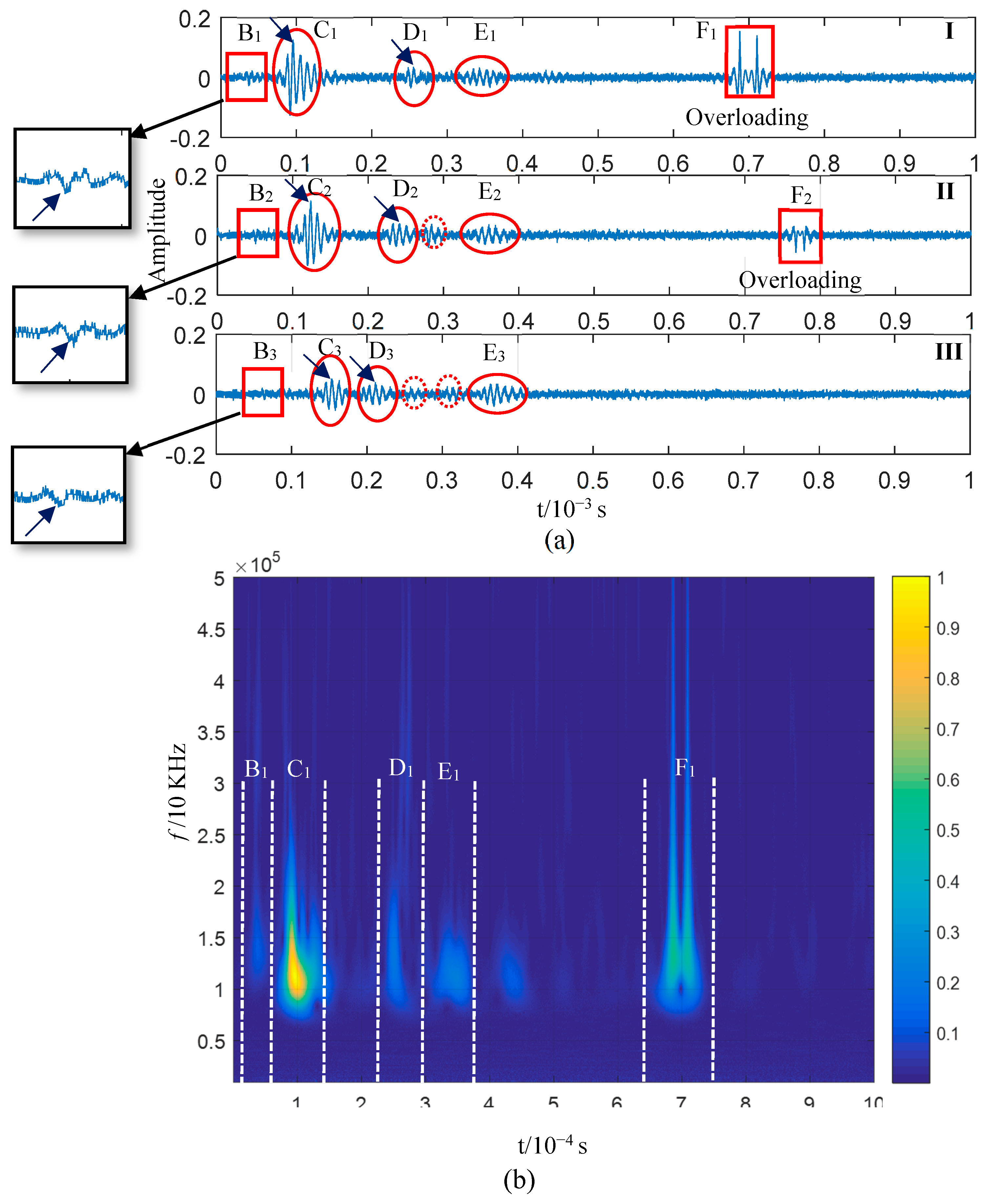
Figure 10a, with the sub-graphs I–III presenting the filtering results of the three sensor signals.
If attenuation in the propagation process is considered, the AE was the component of the closest original signal obtained by PZT3. Therefore, the sub-graph I in
Figure 10a was employed for a time–frequency analysis (
Figure 10b). The wave packets in the F
1 and F
2 block diagrams in sub-graphs I and II are high-frequency components introduced via overload; they are not required for the analysis. The wave packets C
2 and C
3 represent the waveform when the wave packet C
1 passes through PZT2 and PZT1. The wave packet velocity can be calculated if the extreme point (indicated by an arrow in the figure) is taken as the reference point (with the X-axis corresponding to 0.95 × 10
−3 s, 1.236 × 10
−3 s, and 1.532 × 10
−3 s), as shown in
Table 1. The frequency bands of the three wave packets (C
1, C
2, and C
3) are within 100 and 150 kHz, according to the frequency-domain coordinates corresponding to the C
1 wave packet in
Figure 10b. Based on
Figure 3b, the wave velocity range of the
mode in this frequency band ranges from 1657 to 1830 m/s. The propagation velocities of C
1, C
2, and C
3 calculated in
Table 1 are consistent with this range, and the distribution of the three wave packets on the time axis is also consistent with dispersion curve 1 in
Figure 9b–d. Therefore, the wave packets including C
1, C
2, and C
3 probably correspond to the
mode. In the test experiment illustrated in
Figure 8, the type of impact was OP, and the AE generated by the impact was dominated by the
mode and occurred for the first time. Hence, the first-mode wave packet in the high-pass filter signal (wave packets C
1, C
2, and C
3 in
Figure 10a) was generated by the impact.
The reason why the OP-generated AE is dominated by the
mode was discussed in the previous section, and we do not intend to ignore the
mode generated simultaneously because its energy is small. In the test illustrated in
Figure 9, the component force parallel to the plate surface cannot be zero since a small amount of the
mode wave packet exists in the impact AE. These two modes occur simultaneously when the plate is impacted according to the previous analysis. Since the
mode propagation speed is greater than that of the
mode, the two mode waves start to separate when they are generated, and the
mode wave packet is always ahead of the
mode wave packet on the time axis. A trace of the
mode wave packet can be found by carefully analysing the waveforms before C
1, C
2, and C
3. The waveforms marked in Blocks B
1–B3 and their enlarged views are displayed in
Figure 10a, showing their similarity. If the midpoint of these waves (the point indicated by an arrow in the insets) is taken as a reference point, the corresponding propagation velocity of the wave packet is ~3400 m/s (
Table 1). The speed of the
mode in
Figure 3b is 3250 m/s. That is, the actual value matches the theoretical ones if the influences of noise, waveform attenuation, and propagation path on velocity are considered. Therefore, it has been confirmed that the above three waveforms correspond to the
mode according to the propagation velocity of the B
n (n = 1,2,3) wave packets. However, this is not enough proof to demonstrate that the B
1–B
3 wave packets resulted from the impact; it must be proven that the B
1–B
3 and C
1–C
3 wave packets originated from the impact. The
-mode wave packets generated simultaneously were calculated according to the reference point time of the
-mode wave packets B
1–B
3 when the propagation distance and the velocity of the two modes were known. If the coordinates of these reference points fall within the C
1–C
3 wave packet period, the B
1–B
3 and C
1–C
3 wave packets will likely be generated from the impact. The actual propagation velocity between PZT3 and PZT1 (as shown in
Table 1) can be obtained as the velocity of the
and
modes. The propagation distance is the distance from the impact position to the sensor (
Figure 8). The time difference corresponding to the wave packet reference points of the impact-generated
mode can be determined by calculating the TOA differences of the two mode wave packet reference points by referring to the point marked in the B
1–B
3 wave packets in
Figure 10a. The results are summarised in
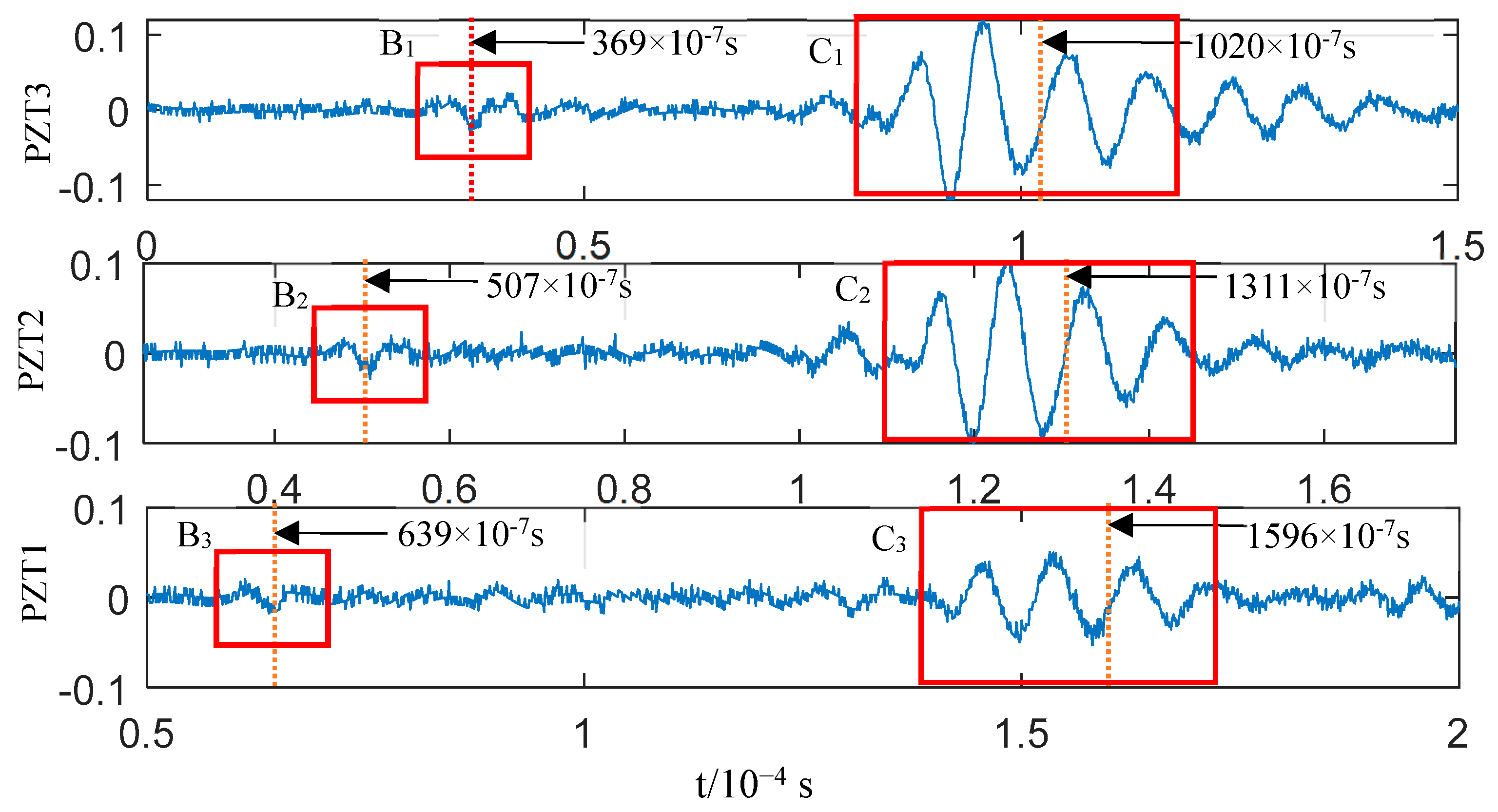
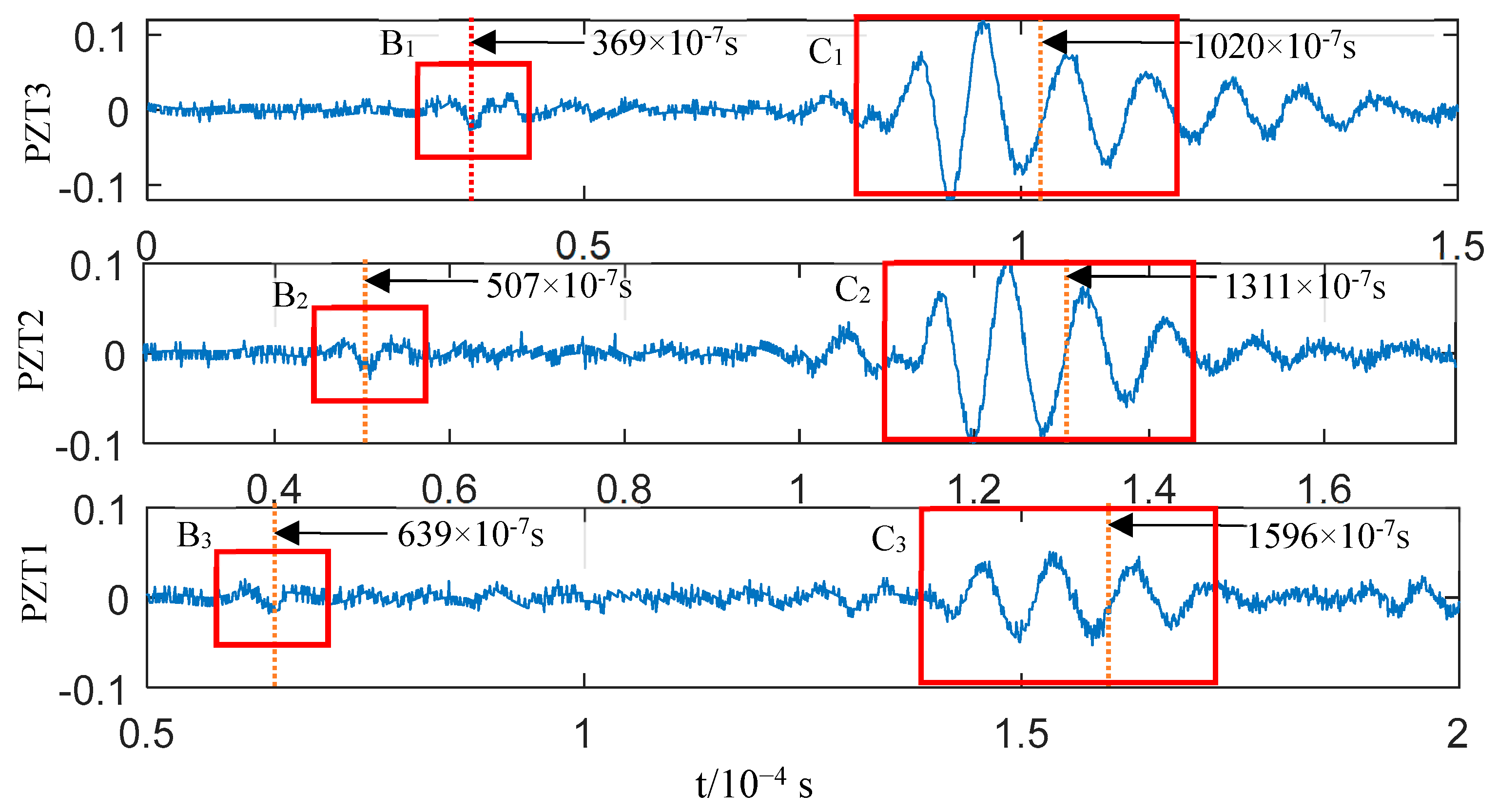
Table 2. The time coordination of the
-mode reference point in
Table 2 was compared with the time domain of the corresponding wave packets C
1–C
3 (
Figure 11). The reference time of the
-mode wave packets B
1–B
3 and the corresponding time point of the calculated
-mode wave packets are indicated in
Figure 11; the time area of the
-mode wave packets calculated using the
-mode ones is highly coincident with the C
1–C
3 wave packets. Therefore, the
-mode wave packets B
1–B
3 and the
-mode wave packets C
1–C
3 in
Figure 10a likely originated simultaneously from the impact. The
- and
-mode wave packets in the AEs generated by the impact of external objects, which were separated at the moment of generation due to their different propagation velocities, were verified via the analysis of the experimental results. The
-mode wave packets will not be superimposed with the
mode ones in the AE generated via the impact of external objects since their propagation velocity is greater than that of the
-mode wave packets.
Besides the typical Class II wave packets B
1–B
3 and C
1–C
3,
Figure 10a also shows D
1–D
3 and E
1–E
3 wave packets with obvious amplitudes as well as other low-amplitude clutter (marked by dotted lines in sub-graphs Ⅱ and Ⅲ). D
1–D
3 are considered to be the reflected waves of C
1–C
3 from the time sequence distribution and velocity. Compared with D
2 and D
3, D
1 has an abnormal waveform change, which was likely caused by clutter interference. The propagation direction of E
1–E
3 should be from PZT3 to PZT1 based on the time series layout. The propagation velocity of E
n measured using the reference point is between the
and
modes. A disturbance could not be proven in this paper since the wave packet is late in its time sequence, with abnormal amplitude changes, and no further discussion of it will be provided. No obvious
-mode wave packets were observed when considering the impact AE wave packets; in particular, no
-mode wave packets were discovered after the C
1–C
3 ones. The
-mode wave packets in the impact AE result from the impact of external objects. The analysis results in
Figure 10a indicate that this impact did not damage the plate structure according to the mode characteristics of damage and external impact AE described in the previous section; this is consistent with the impact test conditions.
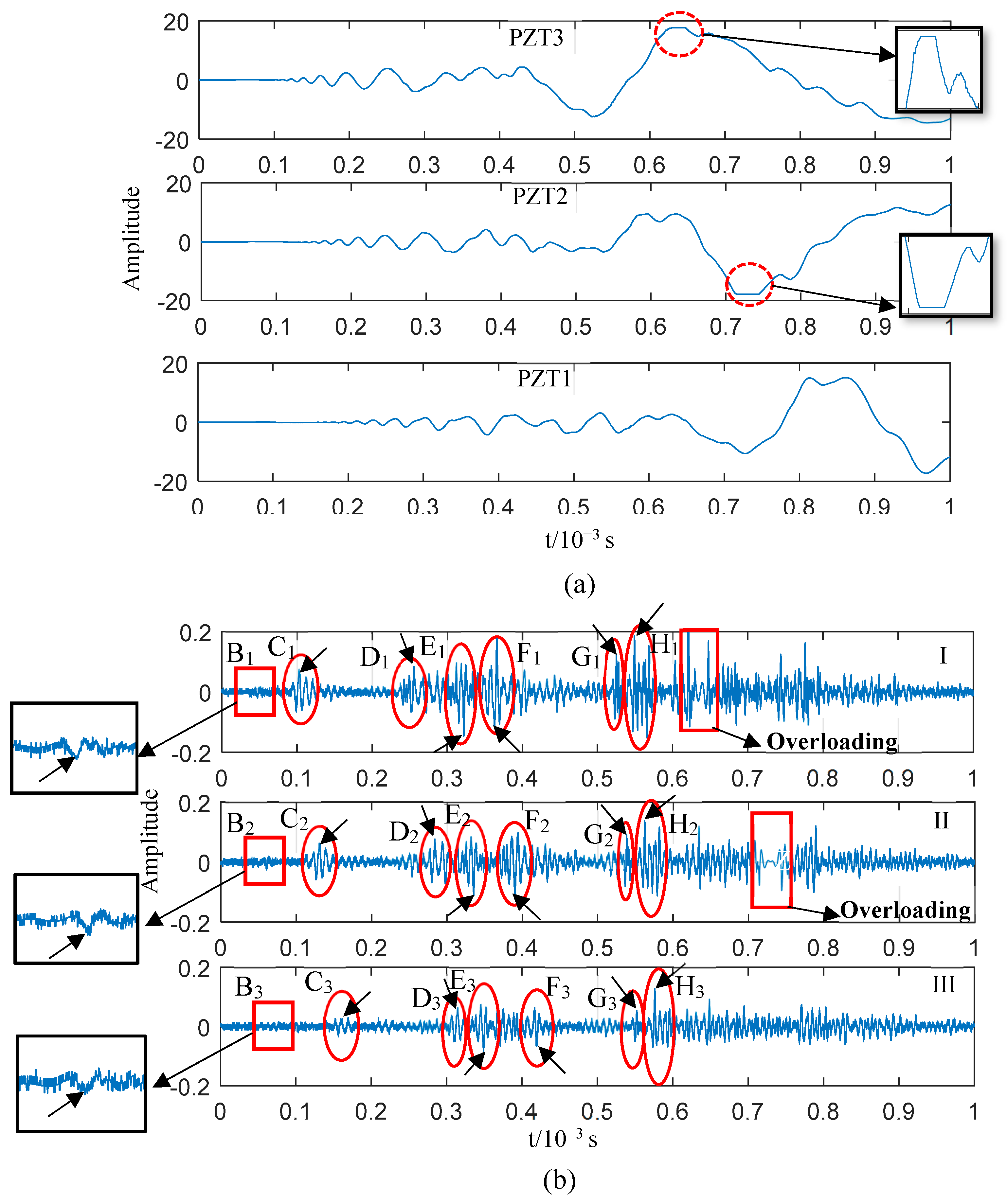
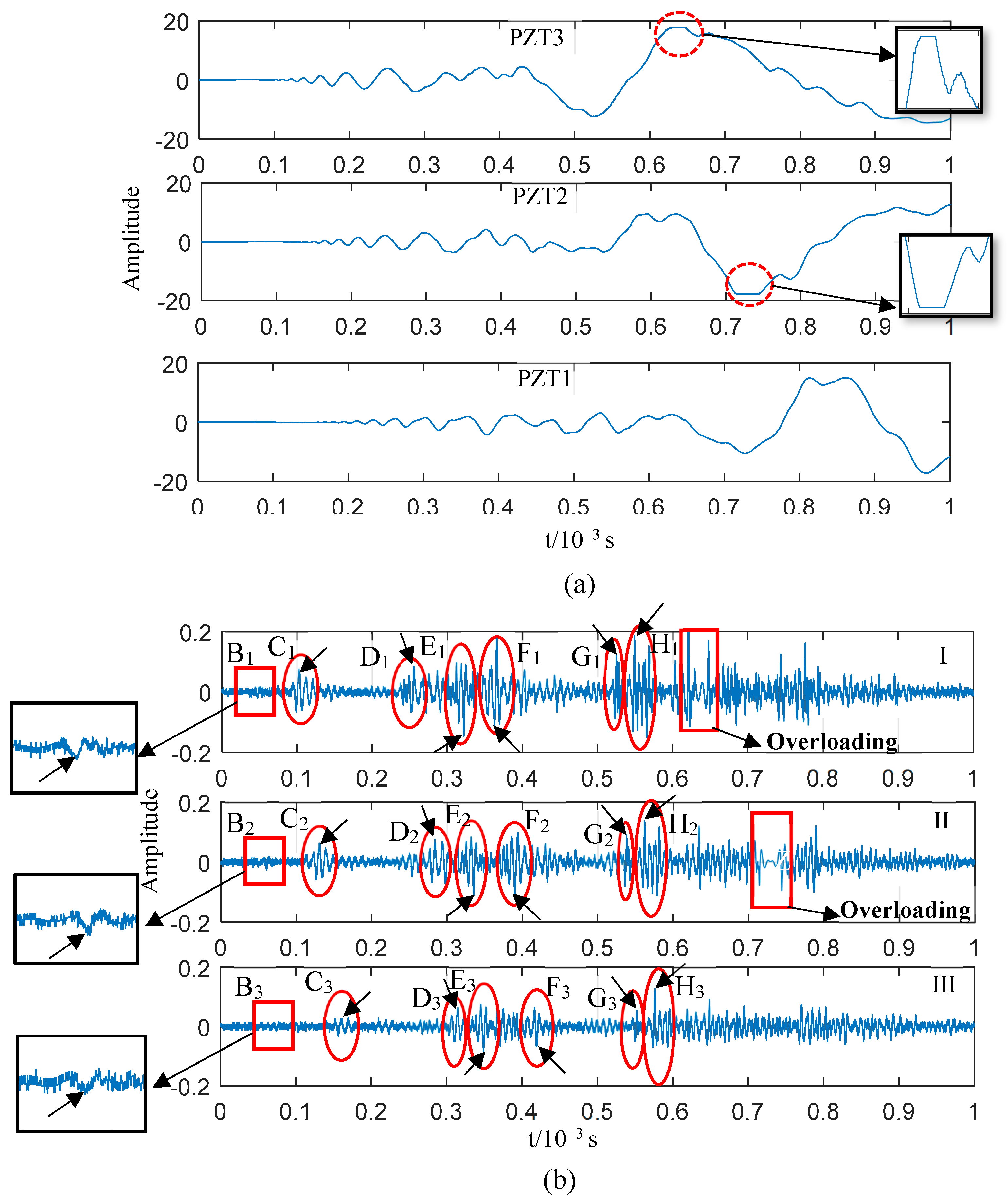
When the impact tool was replaced by a pendulum mass for analysing the impact at the same position, damage could be observed on the epoxy fibreglass plate, as shown in
Figure 8. The corresponding signals collected by the three PZTs are illustrated in
Figure 12; these results are similar to those in
Figure 9a in terms of the waveform. The AE generated by the impact of external matter was dominant, and the signal was overloaded with the waveform shown in dispersion. The difference is that the damage caused by the pendulum impact was visible. The high-frequency components of the three sensor signals (
Figure 12a) were extracted using a zero-phase high-pass filter with a lower cut-off frequency of 100 kHz to further analyse the health information carried by the AEs generated by the pendulum impact; the results are shown in
Figure 12b.
Compared with
Figure 10a, the high-frequency signal obtained via filtering shown in
Figure 12b has more wave packets. The sequence of wave packets in the three PZT signals is denoted as B
n–H
n. To confirm the modes of these wave packets, their propagation speeds were calculated. The typical points of each series of wave packets were selected (and marked with arrows in
Figure 12b) as reference points for calculating the wave velocity, as shown in
Table 3. According to the results, the B
n wave packets were in the
mode, while the C
n ones were in the
mode. The acoustic source of the B
n and C
n wave packets was the pendulum impact rather than the damage. This was explained in detail in the last impact test data analysis. In general, the high-frequency wave packets of these two modes could reach the sensor since the AEs were generated under the impact of external objects on the plate surface the first time. The wave velocity calculated for the D
n wave packets based on the reference points is consistent with the
mode; their propagation direction is along the line drawn from PZT3 to PZT1 according to the time corresponding to the D
1, D
2, and D
3 wave packets, excluding the reflection of B
n wave packets from this propagation direction. The amplitude of the D
n wave packets is not lower than that of the B
n ones. In this case, the D
n wave packets reflecting as B
n ones can also be excluded. Therefore, their source is different from that of the B
n wave packets, which can only be IP. It can be speculated, then, that the acoustic source of the D
n wave packets is delamination since there is no obvious
mode before them.
Table 3 shows that the wave velocity of the E
n wave packets was approaching 3500 m/s, which is close to that of the
mode; this indicates that the E
n wave packets were in the
mode. The E
n wave packets were generated by the force applied parallel to the plane according to the relationship between the force direction and Lamb wave mode described before. The pendulum impacted the plate in a nearly perpendicular direction under the test conditions. The amplitude varies significantly between the E
n wave packets with the impacted
-mode wave (B
n wave packets). This means that the E
n component from the plate direction of the pendulum impact can be nearly excluded; hence, the E
n wave packets come from impact damage, either matrix or fibre breakage. For the remaining F
n, G
n, and H
n wave packets, according to the wave velocity in
Table 3, it can be confirmed that the F
n ones belong to the
mode and the others belong to the
mode. The
-mode F
n wave packets previously had
-mode wave packets, which could only occur due to some kind of plate damage rather than generation via pendulum impact from the perspective of time sequence and amplitude. The
-mode G
n and H
n wave packets could merely have occurred due to damage rather than the pendulum impact. The typical wave packet (B
n–H
n) mode in the sequence diagram in
Figure 12 has been confirmed. In addition, other wave packets may stem from damage. However, the acoustic source might be interfered with by the reflected waves at the edge since it is not situated along a straight line with respect to the three sensors; thus, it could not be recognised in the three sensor signals. Hence, it is not advantageous to further discuss the above modes.
The high-frequency components of the AEs reveal the acoustic source activity in the plate more clearly based on a comparison of the data before and after the impact AE filtering, as shown in
Figure 9,
Figure 10 and
Figure 12. The impact AEs are dominated by the
mode according to the impact wave test data shown in
Figure 10a. The number of wave packets of the two modes is limited, with an orderly distribution at high frequencies (>100 kHz). The plate structure damage caused by the impact is a continuous process with multiple events and various damage types as per the distribution of the high-frequency wave packets in
Figure 12b. Regarding the time sequence, damage-induced AEs occur significantly later than impact AEs. The high-frequency components, the wave packet mode (
or
), and the distribution of the AE wave packet time sequence can be obtained by analysing the data from two tests for the multi-angle interpretation and accurate identification of damage-induced wave packets. The feasibility of the monitoring method for diagnosing the damage of thin plate structures has been proven since damage-induced AEs can be directly extracted from impact AEs.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}