1. Introduction
In recent years, technological progress has enabled the development of learning scenarios using hard- and software systems that were not initially associated with an educational purpose. For example, immersive virtual reality (VR) applications mainly used for entertainment are now considered for research and learning tools due to their high potential in facilitating previously unrealizable learning scenarios within real-world settings. Therefore, diverse VR applications have been integrated into different research areas, such as medicine [
1], psychology [
2], engineering [
3], sports [
4,
5] and more.
For each listed example, the question arises of how VR could be used to support learning [
6] or practice skills to reduce the error probability in real-world scenarios. Hereby, it is essential to recognize the setup of each VR system, which could narrow down or amplify possible applications. In general, an immersive VR system contains several components, such as the head-mounted display (HMD), base stations and controller. Those can differ depending on the manufacturer and the applications. A remaining challenge with today’s VR application is to enable a realistic-looking, reliable full-body visualization. To realize this, the usage of a highly complex and costly motion-capturing system, such as Vicon Shogun (Oxford, UK), is necessary to synchronize users’ movements to the avatar’s skeleton [
7]. This passive marker system consists of a list of space-consuming infrared cameras (often more than 10), tripods, an advanced computer system (SSDs, powerful graphic cards, etc.) and more. Many studies have already used those techniques to facilitate full-body visualization within the laboratory setup [
4,
8]. Considering VR as a learning tool that may also appeal for private use, such as home-based training, it would be unrealistic to assume that the previously described technology is affordable for a private user or household. Therefore, other systems emerged as a practical alternative [
9,
10]. High Tech Computer Corporation (HTC, Taiwan) has developed a wireless, battery-powered photoreceptive tracker (the HTC VIVE Tracker), allowing for the visualization of body limbs through replacing the trackers’ mesh with a realistic-looking body mesh (often the forearms) [
11]. The position of the tracker is determined via the dead reckoning of an integrated 9-DOF IMU and corrected using 18 infrared sensors mounted at different angles, which interact with the base stations to avoid the typical drift of the IMU [
12,
13]. These trackers could be an alternative to such systems realizing the visualization of the user’s body [
14] that cost only approximately one percent compared to the full-featured Vicon system. By placing the tracker on the user’s body, the three-dimensional position over time is captured, and the impression of having control of the virtual body is fulfilled. Additionally, the trackers can be used not only for visualization, but also for collecting user’s movement data to expand the feedback on their movement patterns. This may improve the impact of VR training, especially within the sports sector, in which individualized feedback is essential.
Before confirming the validity and reliability of the tracker usage, it must be compared with the already established measuring tools. Therefore, this paper aims to compare the HTC VIVE Tracker 3.0 with the Vicon Nexus system, which is also known as the gold-standard [
15], evaluated through a high measurement precision of less than 2 mm [
16]. Other systems, such as Kinect [
17] or wi-GAT [
18], have already been evaluated by comparing their data with the outcome from Vicon. Much work has already been performed concerning validating previous models of the VIVE tracker compared to Vicon [
7] or detecting movement trajectories [
19]. Van der Veen et al. (2019) examined the accuracy of the position from the second-generation VIVE trackers compared to an optoelectronic 3D motion-capturing system by measuring movements or reaches conducted by a robot executing more simple movements and humans playing a VR game. The authors stated an acceptable accuracy for translations (averaged deviation under 1 cm) and rotations (averaged rotation shifting of approximately 1.6°). They also concluded a high practical value enabled by the trackers and considered the increased tracking space provided by the next generation of base stations [
7]. Nevertheless, the authors emphasized the importance of examining future versions of VR motion-tracking devices, especially when higher movement velocities need to be tracked. Borges et al. (2018) also tested the trackers for the Astrobee robot. They developed a new open-source tracking algorithm that differs from the source code of VIVE, leading to higher accuracy up to two orders of magnitude [
20]. The authors stated the high precision of the VIVE trackers when static measurements took place, but during motion, the accuracy decreased from the millimeter to the meter range [
20]. Caserman et al. (2019) used the trackers to animate the avatar’s motion, being able to track joint rotations and positions. The authors stated a low end-to-end latency of less than seven milliseconds [
11].
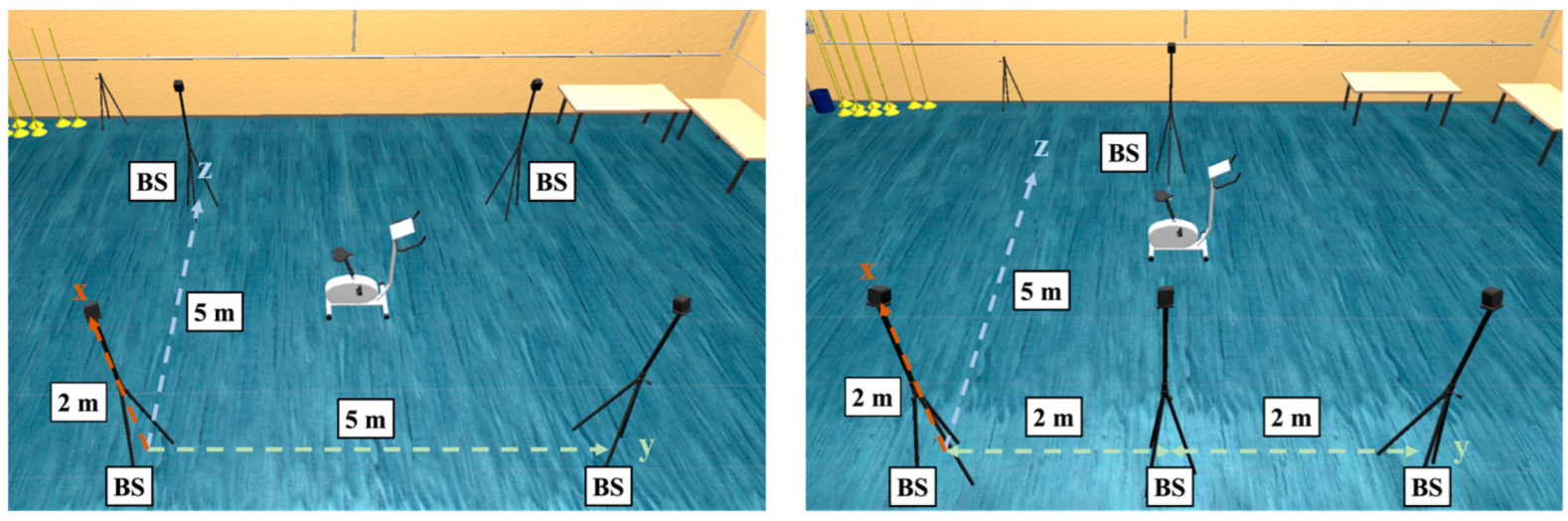
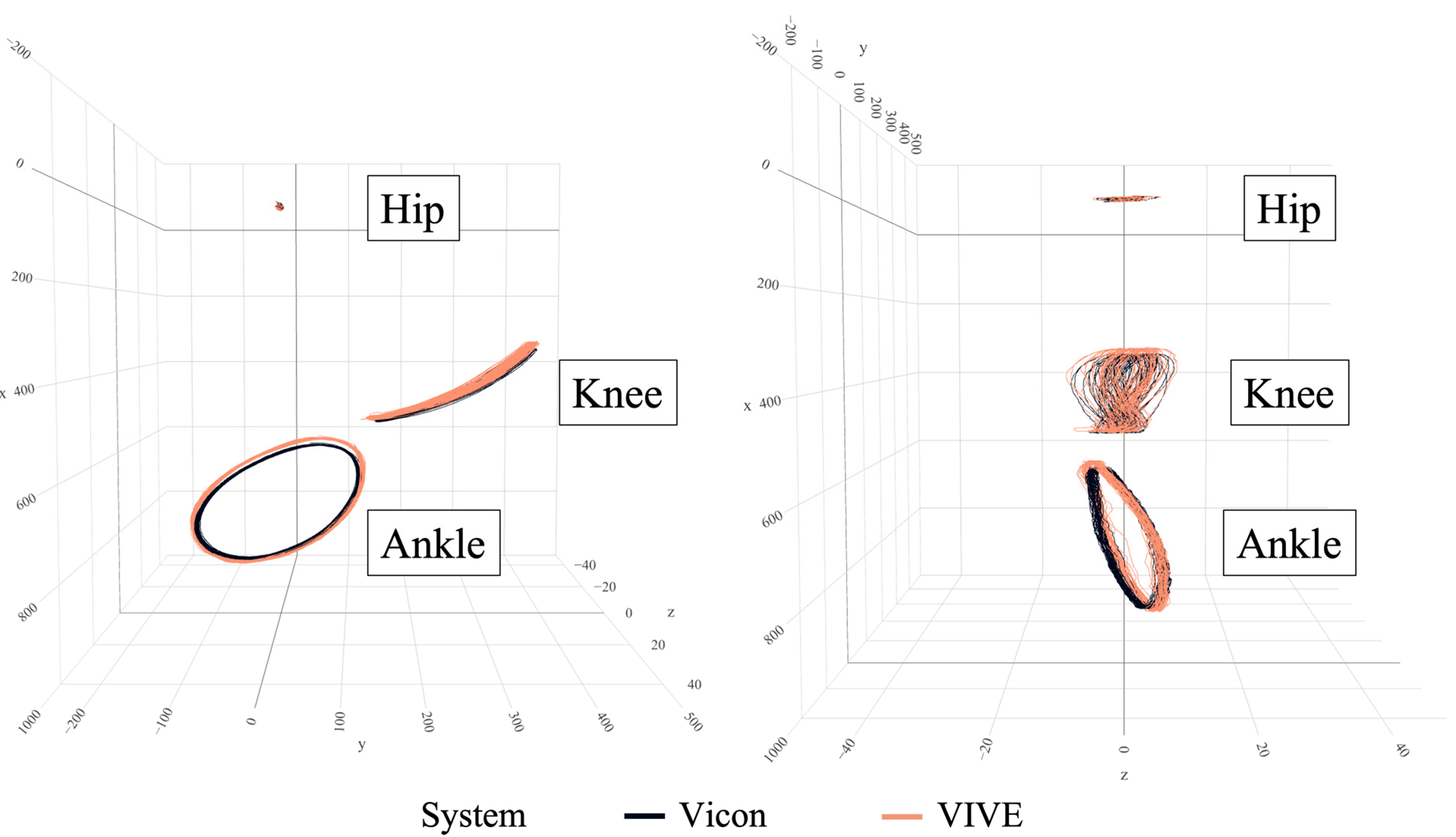
Regarding the current state of the art, the practical use of the VIVE trackers was mainly determined by analyzing movements conducted by robots under laboratory settings. Additionally, those movements are hard to compare to more sport-specific ones, in which fast and partially unpredictable movements often occur. Concerning the technical component, third-generation VIVE trackers (3.0) appeared on the market, being more user-friendly due to the smaller size and weight. Therefore, the goal of the current study is to evaluate the measurement accuracy of the current version of VIVE trackers by comparing them with the Vicon system for higher velocities and accelerations during an athletic movement. For this purpose, we capture the positional data of the hip, knee and ankle while the participant rides a bicycle ergometer at various pedaling frequencies. Furthermore, we vary the placement of the base stations to determine if tracking accuracy increases with a larger number of base stations with an unrestricted line-of-sight and closer distance to the trackers. As an indicator of the measurement accuracy, we compare the recorded trajectories at the knee and ankle of both systems. The translational motion of the knee in cycling is characterized by high speeds and even higher accelerations due to the direct reversal of motion in each cycle. In contrast, the ankle moves circularly around an almost fixed axis of rotation at a constant angular velocity and radial acceleration. We chose these two measurement points for the comparison between VIVE and Vicon because the uniform and circular movements described are characteristic of many other athletic movements. In addition, we calculate the radius of the ankle motion to find out whether the VIVE trackers tend to overestimate or underestimate spatial distances compared to Vicon.
3. Results
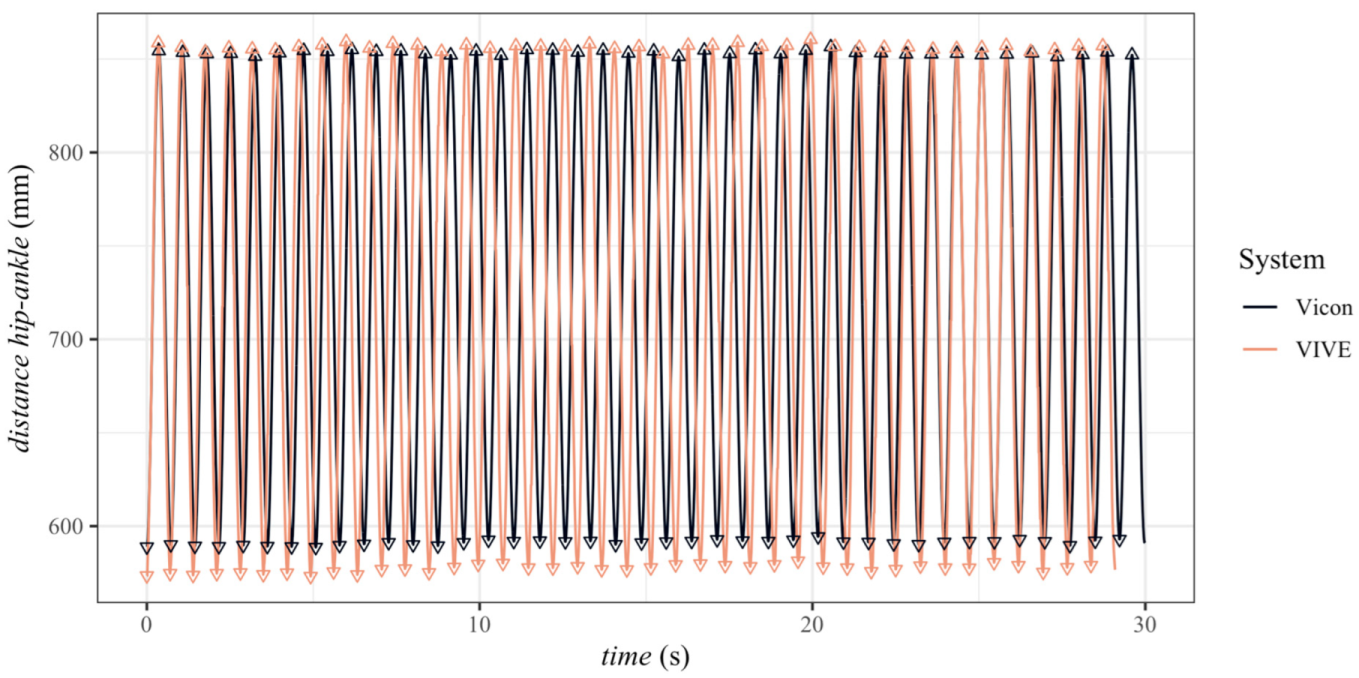
The analysis of the pedaling frequency was based on the distance–time series recorded with Vicon. For the specified frequencies of 80 rpm, 120 rpm and 160 rpm, the average frequencies were 79.8 rpm ± 0.4 rpm, 118.6 rpm ± 2.1 rpm and 157.4 rpm ± 3.0 rpm, respectively. Accordingly, it could be stated that the targeted movement speeds were achieved with sufficient accuracy. As described in the previous chapter, the recording frequencies of the VIVE trackers deviated from the configured recording frequency. Applying the correction, the actual recording frequency averaged over all trials was 86.9 Hz ± 1.2 Hz.
Figure 9 shows the distribution of all measured values as a function of the various influencing factors. As could be clearly seen, the measured values were approximately normally distributed. Furthermore, it could already be clearly seen in
Figure 9 that the distributions became flatter with increasing pedaling frequency on the one hand, which was equivalent to a larger standard deviation, and on the other hand, their peak increasingly shifted to the right, i.e., the spatial distances between both systems became larger.
Reliability testing revealed very high correlations between trials one and two (r = 0.934, p < 0.001) and trials one and three (r = 0.967, p < 0.001). To ensure that the analysis of the combined data from all three trials did not bias the results, the effect sizes of the factor pedaling frequency and base station position were first analyzed for each trial and tracker position and then compared. The analysis showed small-to-medium effects for the factor base station position (knee: 0.017 < ηp2 < 0.096; ankle: 0.029 < ηp2 < 0.120) and large effects for the factor pedaling frequency (knee: 0.254 < ηp2 < 0.297; ankle: 0.435 < ηp2 < 0.493). As a result of the high correlation and consistent effect sizes across the three trials, the measurement series of the trials were combined for all further analyses.
First, we focused on the evaluation of the spatial distances for the tracker at the knee, which moved almost linearly, as can be seen in
Figure 5. As shown in
Table 1, significant differences occurred for both main effects as well as the interaction. The pedaling frequency with
ηp2 = 0.275 had a large effect and the position of the base stations with
ηp2 = 0.048 had a small effect on the measurement accuracy of the VIVE trackers at the knee. From the pairwise comparisons, the rectangular base station position led to significantly smaller deviations between Vicon and VIVE at pedaling frequencies of 80 rpm and 160 rpm. At the frequency of 120 rpm, slightly smaller but still significant (
p = 0.007) deviations could be seen for the kite-shaped arrangement of the base stations. The largest difference of 13.03 mm between the two base station positions was found for the pedaling frequency of 160 rpm. Regardless of the frequency, the deviations for the rectangle base station position were significantly smaller, by an average of 4.80 mm, compared to the kite arrangement. The analysis of the pairwise comparisons of the pedaling frequency showed that the measurement accuracy decreased significantly with increasing speed in each case (see
Table 1). Here, the mean differences between 80 rpm and 120 rpm (Δ
d80 rpm → 120 rpm = 3.86 mm) were smaller than between 120 rpm and 160 rpm (Δ
d120 rpm → 160 rpm = 12.39 mm).
In addition to evaluating the nearly linear motion of the knee, we also focused on the circular motion of the ankle (see
Figure 5). The results of the spatial distances between the VIVE tracker and Vicon marker at this position are shown in
Table 2. Again, significant differences for the dependent variable distance could be seen for the two main effects and the interaction term. Compared to the tracker at the knee, the pedaling frequency had an even larger effect on the measurement accuracy with
ηp2 = 0.458 than the base station position with
ηp2 = 0.064. If we looked again at the pairwise comparisons for the arrangement of the base stations, we saw the same pattern as for the tracker at the knee. While at frequency levels of 80 rpm and 160 rpm the rectangular arrangement yielded significantly lower deviations (
p < 0.001), the reverse was true at 120 rpm. Here, the measurements of the kite arrangement were again slightly but significantly more accurate than for the rectangular base station position. The largest difference between the groups of the arrangement was obtained with 13.66 mm at the highest pedaling frequency of 160 rpm. Overall, the rectangular base station position resulted in a significantly smaller deviation of 5.82 mm compared to the kite arrangement. As previously observed for the tracker at the knee, the deviations increased significantly with increasing pedaling frequency (see
Table 2). Regardless of the base station position, the measurement accuracy between the pedaling frequencies of 80 rpm and 120 rpm also decreased less (Δ
d80 rpm → 120 rpm = 6.38 mm) than between the frequencies of 120 rpm and 160 rpm (Δ
d80 rpm → 120 rpm = 18.53 mm). In general, it could be determined for all pedaling frequencies depending on the base station positions that the deviations were greater for the tracker at the ankle than for the tracker at the knee.
Since the absolute value was always used for the calculation of the spatial distance, the information in which direction the two systems deviated from each other was lost. Therefore, a further analysis was performed for the radius of the approximately circular motion of the ankle to prove whether the VIVE trackers overestimated or underestimated the range of motion. For the statistical analysis of the radii, we used only the data from the first trial. The results of the descriptive and inferential statistical analysis are presented in
Table 3. Here, it could be seen that all interactions with the within-subject factor system had a significant influence (
p < 0.001). Furthermore, the pedaling frequency evoked significant differences for the radius (
p < 0.001). Only the base station position factor had no significant influence (
p = 0.165). As expected from the previous results, the within-subject factor system had the largest effect with
ηp2 = 0.736. In comparison, the between-subject factors of pedaling frequency and base station position had only a small effect (
ηp2 = 0.038) and no effect (
ηp2 < 0.001), respectively. From the descriptive results, the VIVE trackers continuously measured larger radii than Vicon across all measurement conditions. The radius measured with VIVE also increased with increasing rotational speed, while that of Vicon remained unchanged. While the differences of the radii between Vicon and VIVE were only 7.7 mm at 80 rpm, the difference grew to 25.6 mm for 160 rpm. The increase in the differences between the frequencies 80 rpm and 120 rpm with 7.5 mm was smaller than the increase between 120 rpm and 160 rpm with 10.4 mm.
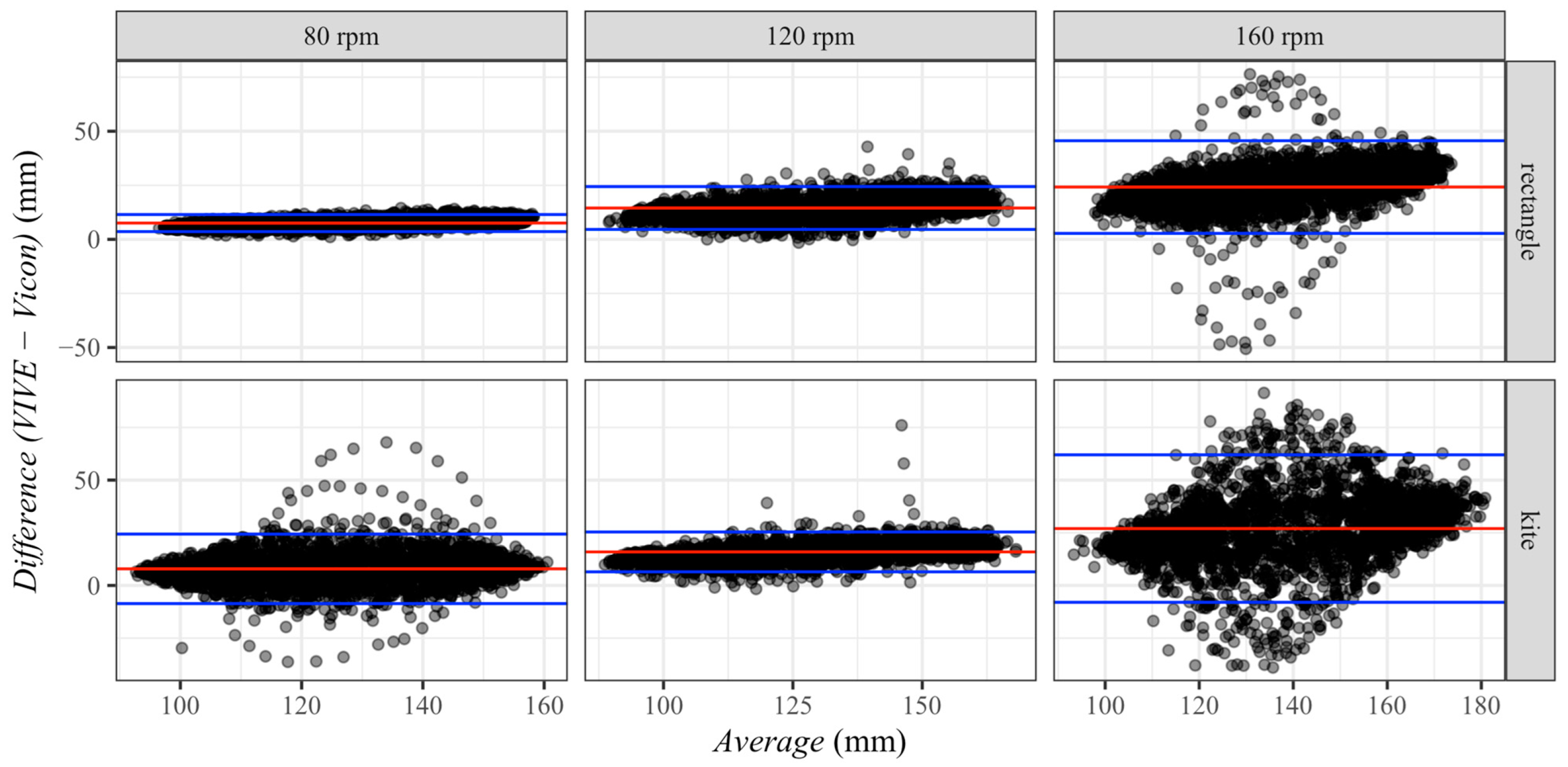
The Bland–Altman diagrams confirmed the previously described trend of systematic measurement errors between VIVE and Vicon (see
Figure 10). Pearson’s correlation test between VIVE and Vicon showed a large effect (
r > 0.5) for all conditions. The largest effect (
r = 0.996,
p < 0.001) was found at the pedaling frequency of 80 rpm and the rectangular arrangement of the base stations. On the other hand, the smallest effect (
r = 0.713,
p < 0.001) was shown for the kite-shaped setting of the base stations at the pedaling frequency of 160 rpm. Moreover, it could be observed that the dispersion of the deviations between both measuring systems slightly depended on the height of the measured values in the investigated radius measuring range between 90 and 180 mm. The largest correlation (
r = 0.570,
p < 0.001) between the difference and mean existed for the pedaling frequency of 80 rpm and the rectangular base station arrangement. The lowest correlation (
r = 0.134,
p < 0.001) was observed for the same pedaling frequency of 80 rpm for the kite-shaped arrangement.
4. Discussion
The aim of this study was to investigate whether the VIVE trackers were usable for future VR training sessions or, generally, for the sports sector. On the one hand, their usability could be, for example, the visualization of different body limbs or even a full-body visualization using real-time inverse kinematics in VR and, on the other hand, in providing feedback to individual users about their movement patterns by collecting positional data of body parts in virtual environments. Therefore, we examined the measurement accuracy of the HTC VIVE Tracker 3.0 during real athletic movements. To cover different typical movement patterns of athletic skills, we tracked the positions of the knee and the ankle during cycling on a bicycle ergometer. While the knee followed an approximately one-dimensional linear motion between two points with high translational accelerations and velocities, the ankle moved almost circularly at a constant radial velocity and acceleration. Furthermore, the influence of various factors (pedaling frequency and positioning of the base stations) was also investigated to generate the prerequisites for adequate measuring. For this purpose, the position data of the VIVE trackers were compared with the gold-standard Vicon. We chose to calculate the spatial distance between the trajectories of the systems at the knee and ankle as well as the radius of the nearly circular ankle motion from the raw data as parameters, allowing for the comparison of the two measurement systems. Since difficulties appeared in synchronizing the VIVE trackers with Vicon as previous studies also reported [
25], we corrected the timestamps of the VIVE data based on the minimum and maximum amplitude of each cycle to compare the measured positions at each point in time. As a result of the different acquisition frequencies of the two measurement systems, we interpolated the time-dependent position data to the common frequency of 80 Hz.
Although significant differences occurred concerning the chosen parameters, we saw great potential for using the trackers within future training sessions within virtual environments. It was not surprising that there was a significant deviation determined between the systems for the spatial distance at both the knee and the ankle, since the sample size was large and both technological systems were based on different metrologies. The assumption resulted from the outcome of previous studies’ results, which compared sensors based on other measurement techniques with Vicon. Smaller deviations were found for the Kinect system, for example, (5 mm ± 1.5 mm) [
26,
27,
28]. The measurement accuracy could suffer in terms of its validity and reliability caused by faster movements [
29]. This also occurred in the current study, since the differences between the VIVE trackers and Vicon significantly increased at higher movement speeds. Previous studies already evaluated the trackers for their specific purpose, and deviations in the millimeter range were also reported [
20,
30]. Nevertheless, they emphasized that the trackers did not meet the prerequisites needed for precise measurements for robotic applications. Although the authors recommended the usage of the trackers for indoor and outdoor experiments, it is essential to specify the purpose of their inclusion.
The analysis showed that the pedaling frequency influenced the measurement accuracy of the VIVE trackers much more than the arrangement of the HTC VIVE base stations. Here, it could be shown that the spatial distance between VIVE and Vicon significantly increased with increased movement speed. While the deviations at the knee increased by approximately 5 mm for each frequency level, they increased by as much as approximately 10 mm at the ankle. It could also be seen from the results that the measurement accuracies at low rotational speeds at the knee and ankle were at the same level. With increasing frequency, significantly higher spatial deviations could be observed for the tracker at the ankle compared to Vicon than at the knee. On the one hand, this could possibly be because there was generally less deviation from the trajectory for the rectilinear motion of the knee than for the circular motion of the ankle. On the other hand, the constant change in the direction of the tangential motion on the circular trajectory may have caused larger positional deviations to be measured at the ankle. A smaller, but still significant, influence on the measurement accuracy of the VIVE trackers had the positioning of the base stations. The rectangular arrangement of the base stations recommended by the manufacturer [
31] was confirmed as the optimal positioning for both the tracker at the knee (
drect = 15.3 mm ± 9.3 mm) and the one at the ankle (
drect = 20.8 mm ± 11.6 mm). A kite-shaped arrangement of the base stations with the background of allowing for direct visual contact and reducing the distance of the trackers to three of the four base stations missed the target and led to a lower measurement accuracy of the VIVE trackers at the knee (
dkite = 20.1 mm ± 16.0 mm) and ankle (
dkite = 26.6 mm ± 18.5 mm). However, there was a strong interaction effect between the positioning of the base stations and the pedaling frequency. While there were significantly greater deviations for the kite-shaped arrangement at 80 rpm and 160 rpm, its measurement accuracy for the pedaling frequency of 120 rpm was only minimally more accurate than that of the rectangular arrangement. Nevertheless, in summary, the rectangular arrangement provided more accurate results than the kite-shaped one.
To be able to determine the direction of the absolute spatial distances between the position data measured with Vicon and VIVE, the radii of both measurement systems for the movement of the ankle were compared. The inferential statistical analysis showed that the measurement system had a significant and by far the largest effect on the measured radius. Furthermore, the pedaling frequency had a very strong influence on the measurement accuracy, whereby, analogous to the previous results, the deviations also increased with increasing frequency. The positioning of the base stations had no effect on the radius. The descriptive statistics showed that the radii measured with the VIVE trackers were always larger than those measured with Vicon for all conditions. The most obvious reason that the circular motions of VIVE were overestimated was due to their construction and operation. The VIVE trackers’ position data were calculated via the double integration of accelerations measured with the IMU and calibrated in space using the base stations to counteract typical drift. However, due to the double integration, even minimal deviations of the measured accelerations were potentiated in the resulting position. The fact that the deviations became steadily larger with increasing accelerations proved the cause described. Accelerations of more than 600 m/s2 occurred for the largest pedaling frequency examined. In combination with the maximum possible recording frequency for the wireless transmission of the VIVE trackers of 90 Hz, the high accelerations led to a delayed reversal of direction due to the double integration, which was why movements that were not linear were overestimated.
Due to the observed deviation between the specified and the actual recording frequency of the VIVE trackers, their time stamps had to be corrected using the data recorded with Vicon. However, such a correction was only possible if a second, parallel running measurement system was available. Accordingly, further investigations should find out why, on the one hand, the actual recording frequency of the VIVE trackers deviated from the set one and, on the other hand, why these deviations were not constant across all trials. A possible cause could be an uneven utilization of the CPU, or the limited processing power of the hardware used, although these met the requirements specified by the manufacturer. Despite the adjustment of the time stamps of VIVE, only an approximation could be achieved. Random deviations, which could not be corrected with the linear regression, sometimes led to significant deviations of the spatial distance between both measurement systems due to the fast movements.
In some cases, very high deflections in the position time series were measured outside the analyzed measurement period, which did not correspond to the cyclic movement of the tracker observed from the outside. This observation was consistent with the dropouts of the VIVE trackers previously found by Verdelet et al. [
32], where the trackers in our investigations also needed approximately 3 s to regain their position in space and provide reliable values.
Concerning the practical usage of the trackers within sport-specific virtual training scenarios, we saw a high potential to visualize task-relevant body parts accurately. The minimal shifting to the body position of an already evaluated system such as Vicon was only a few millimeters, and the humans’ perception in virtual environments was manipulatable to a certain degree. Additionally, the trackers’ data could be captured throughout the training session to ensure the individual positional feedback of participants’ body limbs. These data could be used to instruct the participants on their rough movement patterns. However, caution should be exercised when determining precise performance diagnostic parameters, as these results may be subject to error, especially at high velocities and accelerations, due to temporal offset and spatial deviation. One should keep in mind that Vicon includes complex full-body models that calculate the natural joint’s origin, whereas the trackers are only placed on the surface. Therefore, they can first be used in terms of the fundamental placement of, for example, step length, turnings of specific body limbs and the chronological sequence of these.
5. Conclusions
In this study, the position data from HTC VIVE Tracker 3.0 at the hip, knee and ankle were recorded while riding a bicycle ergometer at different pedaling frequencies and different base station arrangements. For the analysis of the measurement accuracy, the positional data at the knee and the ankle were compared to the gold-standard Vicon by calculating the spatial distance at each point in time from the raw data. The comparison of the various influencing factors showed that the movement speed represented by the pedaling frequency had the greatest effect on the accuracy of the measured positions. The influence of the base station positioning on the measurement accuracy was smaller, but also significant, with the rectangular arrangement showing the smallest differences to the gold standard. Nevertheless, the quality of the measured values for uniform as well as circular movements was high, even during various faster athletic skills with velocities up to 3.3 m/s and accelerations of more than 600 m/s2. Regardless of the influencing factors, the measurement accuracy was sufficient for reconstruction of body parts using inverse kinematics for visualization in VR for adequate movements. In addition, the HTC VIVE trackers were also suitable for measuring the position of, as well as distances between, body points or joints in field tests, where Vicon’s complex and expensive laboratory setup, including calibration, was not practical. For the rapid evaluation of athletic movements, the measurement accuracy was also high enough to be able to draw first conclusions about the quality of the executed technique from the measured body positions and, thus, revealed possibilities for its optimization. However, the VIVE trackers would not be suitable for high-precision biomechanical analyses.
Although, in this study, we investigated both linear and circular movements for different velocities and accelerations typical for a variety of athletic skills, the investigated activity of cycling was characterized by low amplitudes and cyclic movements. Therefore, future studies should confirm the results for such movements with a larger and more complex range of motion. The temporal resolution of the HTC VIVE trackers should also be analyzed in more detail in conjunction with Unity during wireless transmission of the data.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}