

Robust Adaptive Control Strategy for a Bidirectional DC-DC Converter Based on Extremum Seeking and Sliding Mode Control

 ,
,  , , ,
, , , 
Abstract
1. Introduction
- The objectives of tracking accuracy, disturbance suppression, and chattering alleviation are overall achieved by the proposed ESO-based CSMC.
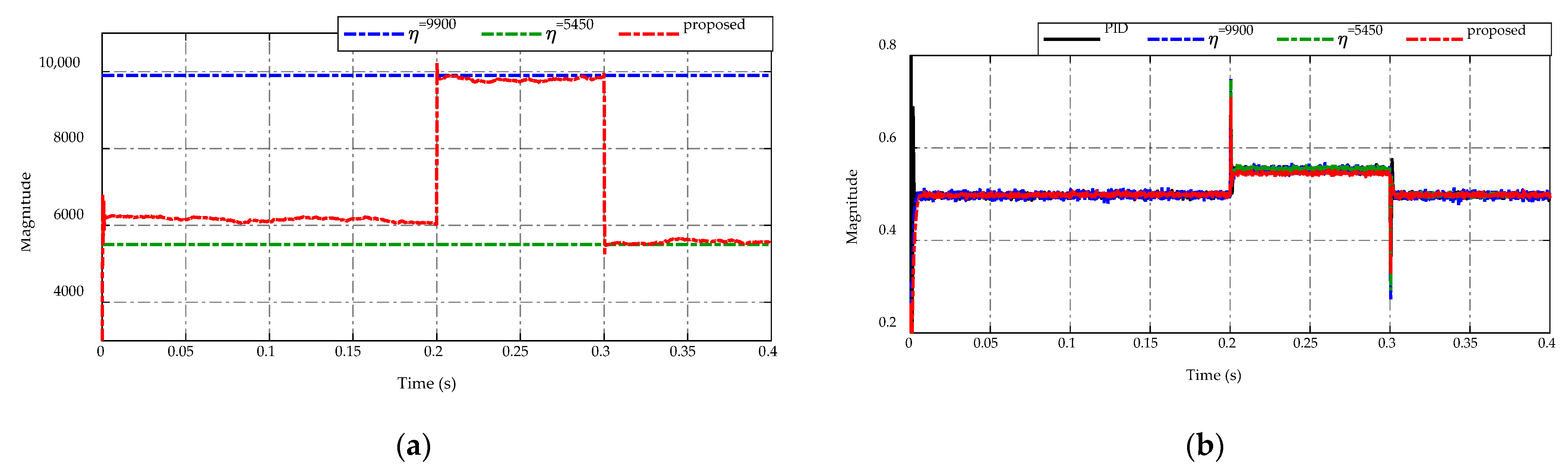
- An ES-based adaptive scheme particularly designed for CSMC is proposed to adjust the switching gain, which can reduce the voltage ripple and the magnitude of the peaking phenomenon.
- The stability of the proposed strategy for the whole system is theoretically proven by the Lyapunov approach in the influence of the matched and mismatched disturbances.
- The validation is performed to verify the effectiveness and reliability of the proposed strategy under three case studies of load resistance variation, buck/boost mode switching, and input voltage variation.
2. Nonlinear Model of Bidirectional DC-DC Converter
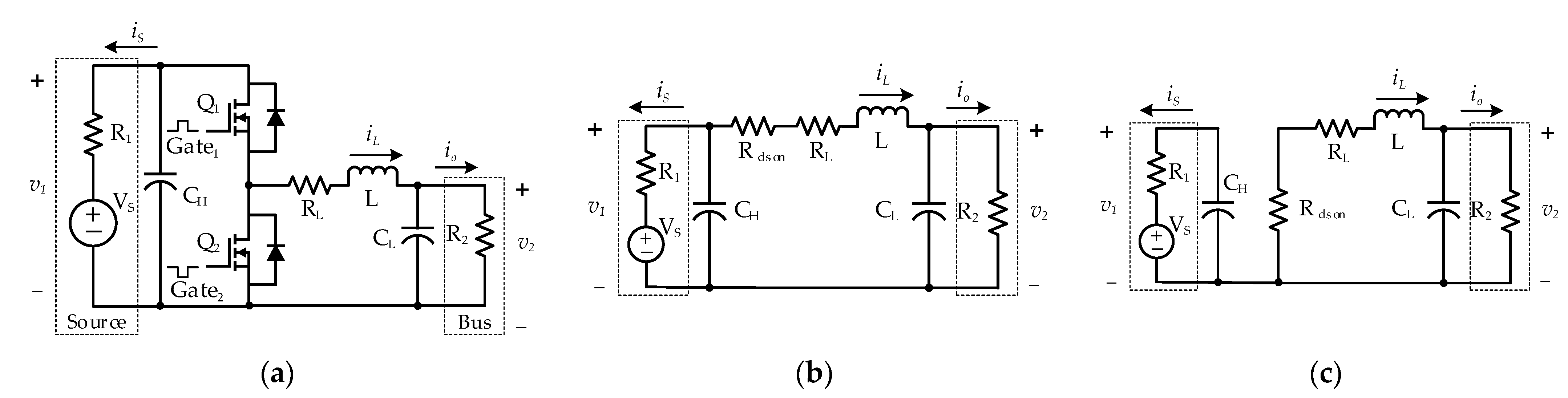
2.1. Generalities of the Bidirectional Converter Circuit
2.2. Control-Oriented Modeling
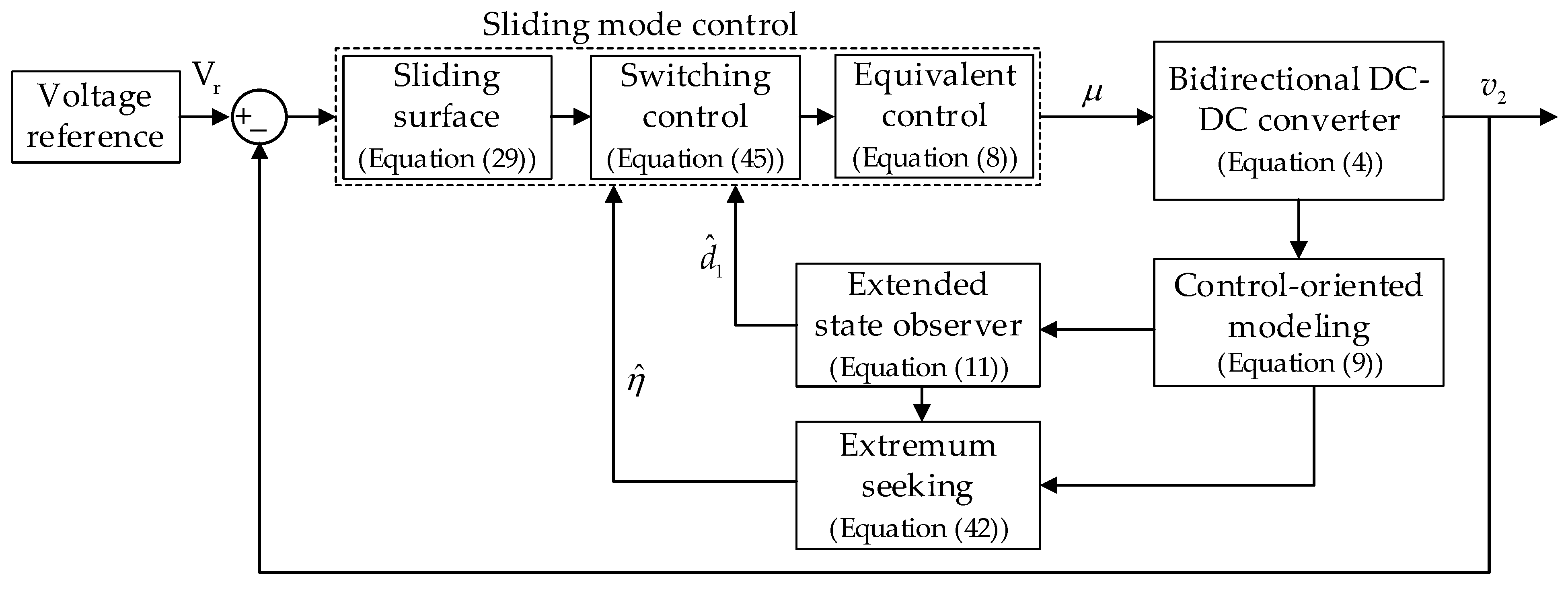
3. Control Algorithm Design
- Control-oriented modeling: transforming the average model (4) into a common canonical form with different disturbances being grouped into matched and mismatched disturbances.
- Mismatched disturbance estimation and rejection: implementing the ESO to estimate mismatched disturbances in real time and utilizing the estimation results to enhance the CSMC equivalent control signal.
- Matched disturbance suppression: leaving the matched disturbance for the robustness of a CSMC to handle.
- Adaptive scheme: switching parameter of CSMC with ES for chattering reduction, disturbance variation adaption, and optimal control signal generation.
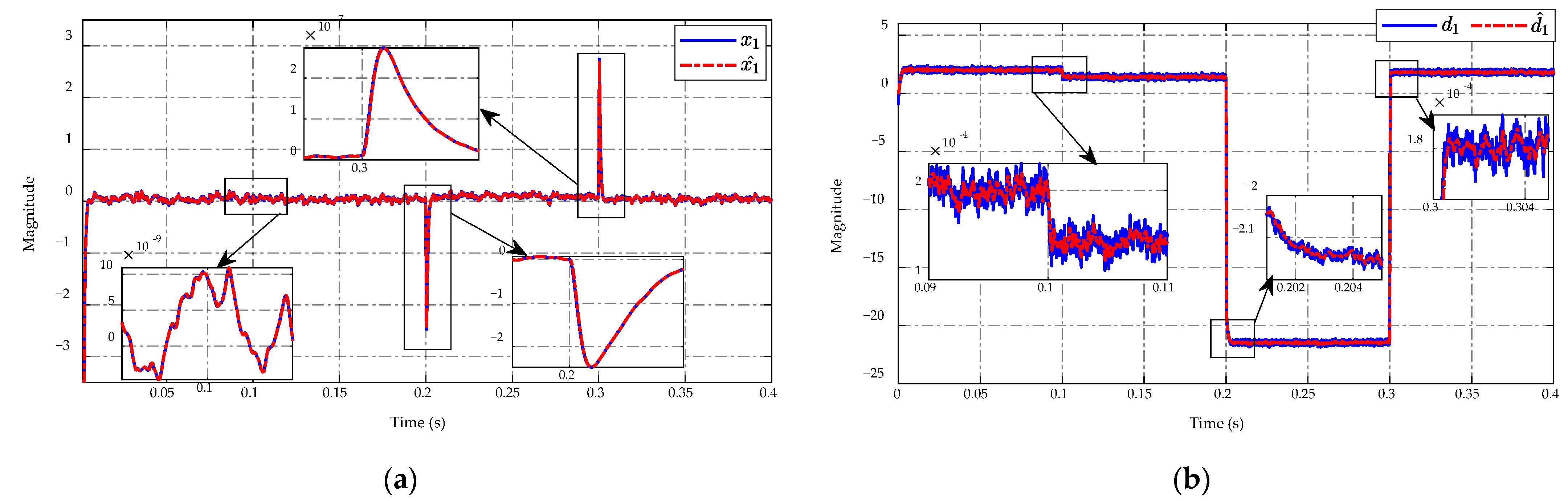
3.1. Extended State Observer for Mismatched Disturbance Estimation
3.2. Continuous Sliding Mode Control Design
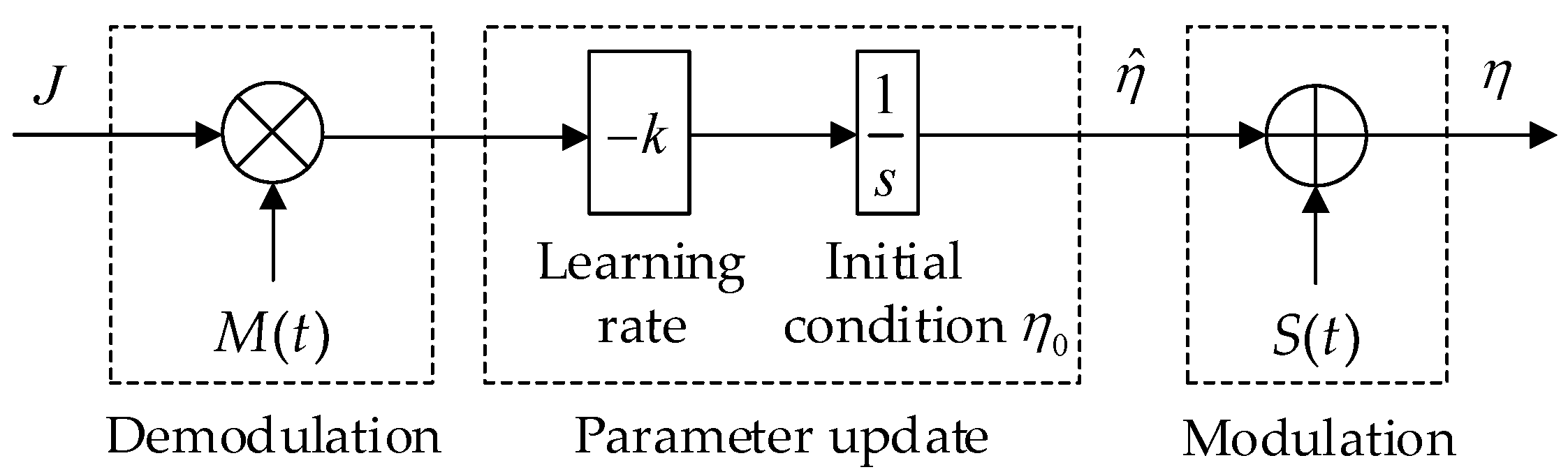
3.3. Adaptive Scheme by Extremum Seeking
- Demodulation: acquiring the gradient information by multiplying the calculated objective function J by another sinusoidal signal with the same frequency as the modulation signal and a denotes the tuning parameter. An optional high-pass filter could be added to this stage to remove bias from the responded objective function.
- Parameter update: updating the switching parameter by integrating the demodulated signal. This stage consists of a learning rate k, which determines convergence speed and accuracy. An optional low-pass filter could be added to this stage to filter out high-frequency noise from the demodulated signal.
- Modulation: perturbing the being-optimized switching parameter with a low-amplitude sinusoidal signal with b as the modulation amplitude.
3.4. Stability Analysis
4. Simulation Results
4.1. System Setup
4.2. Case Study Results
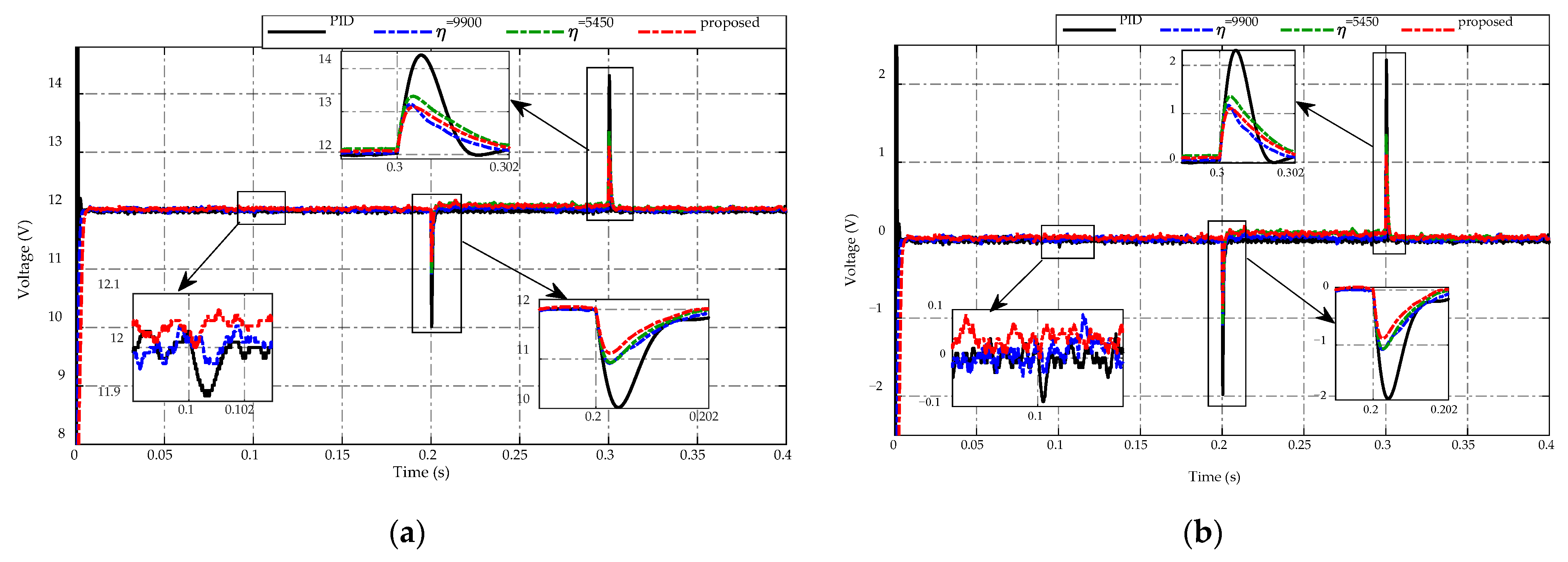
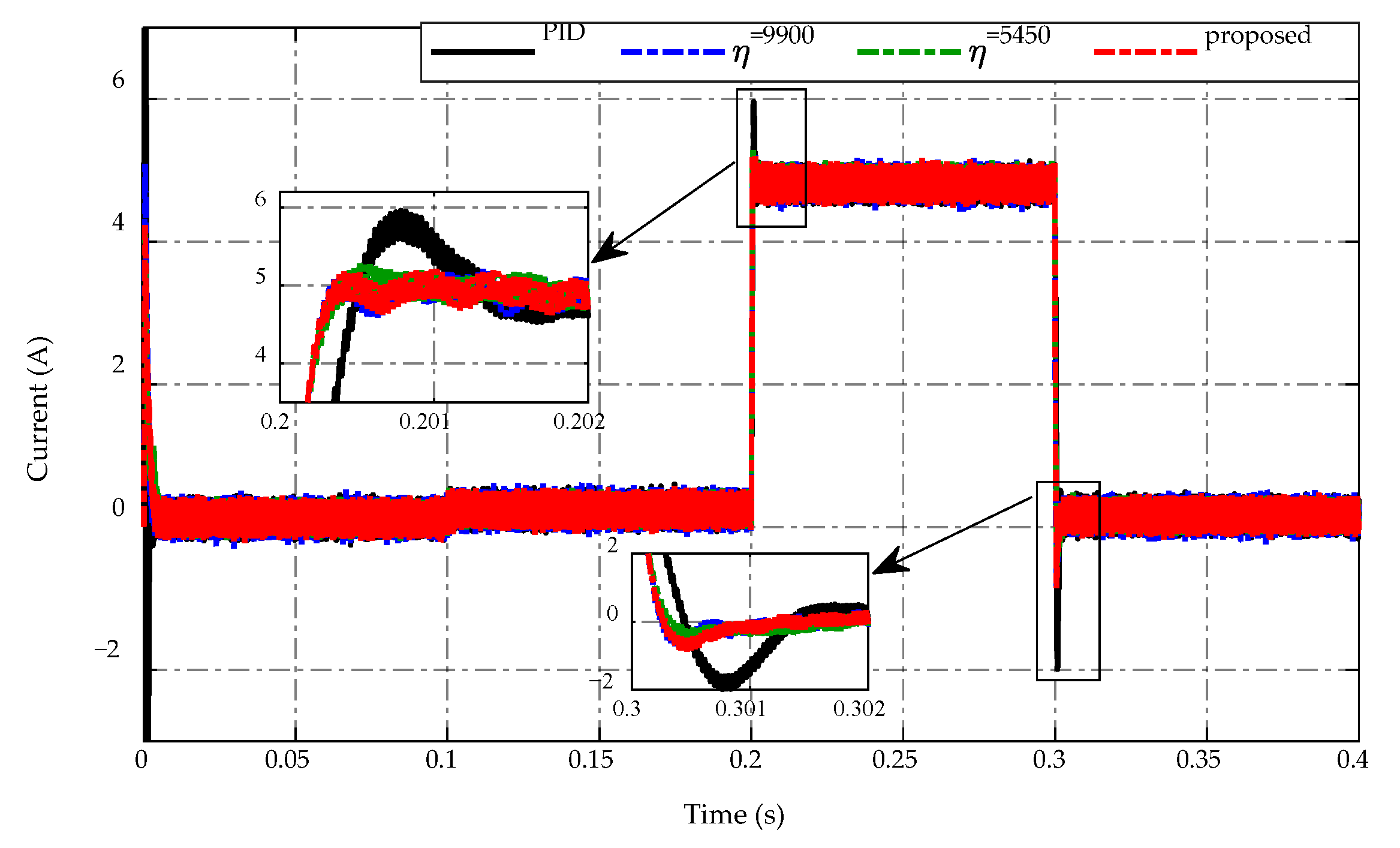
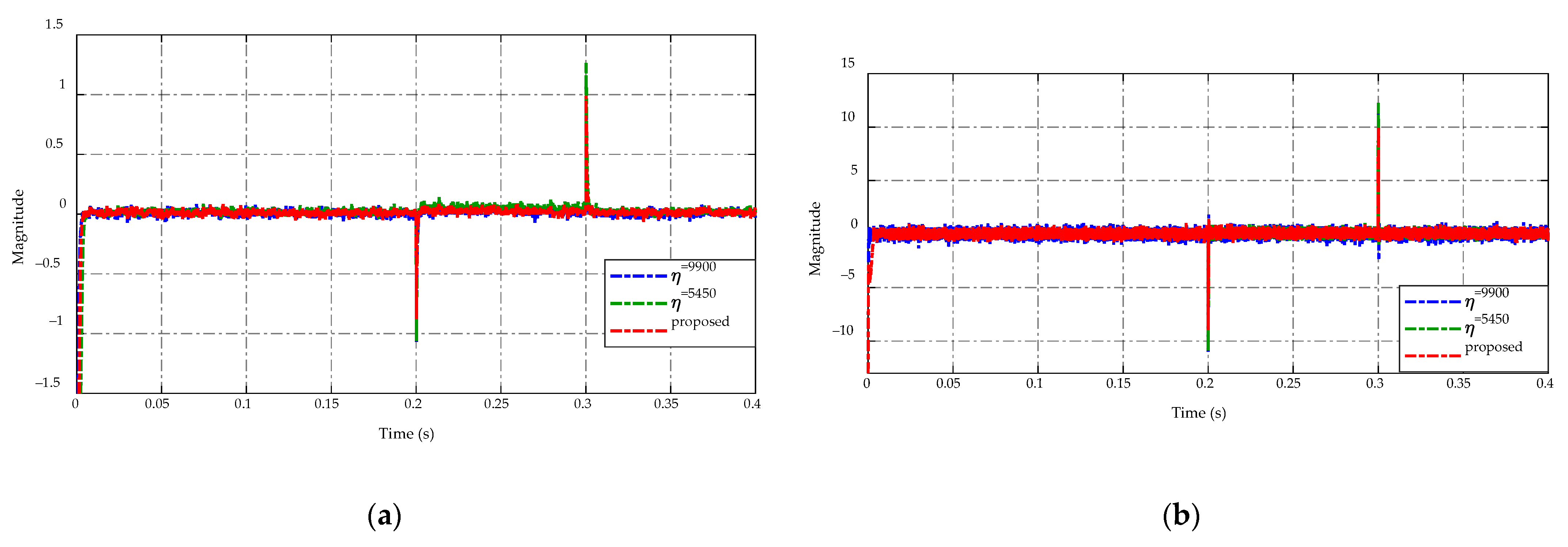
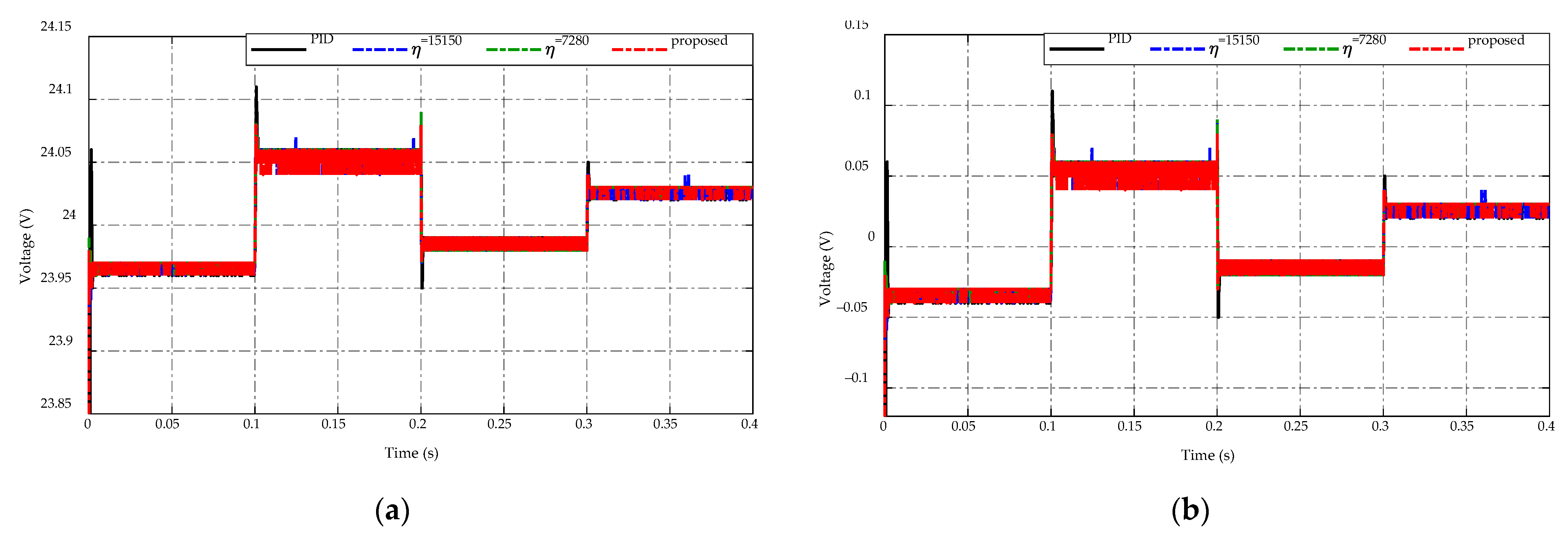
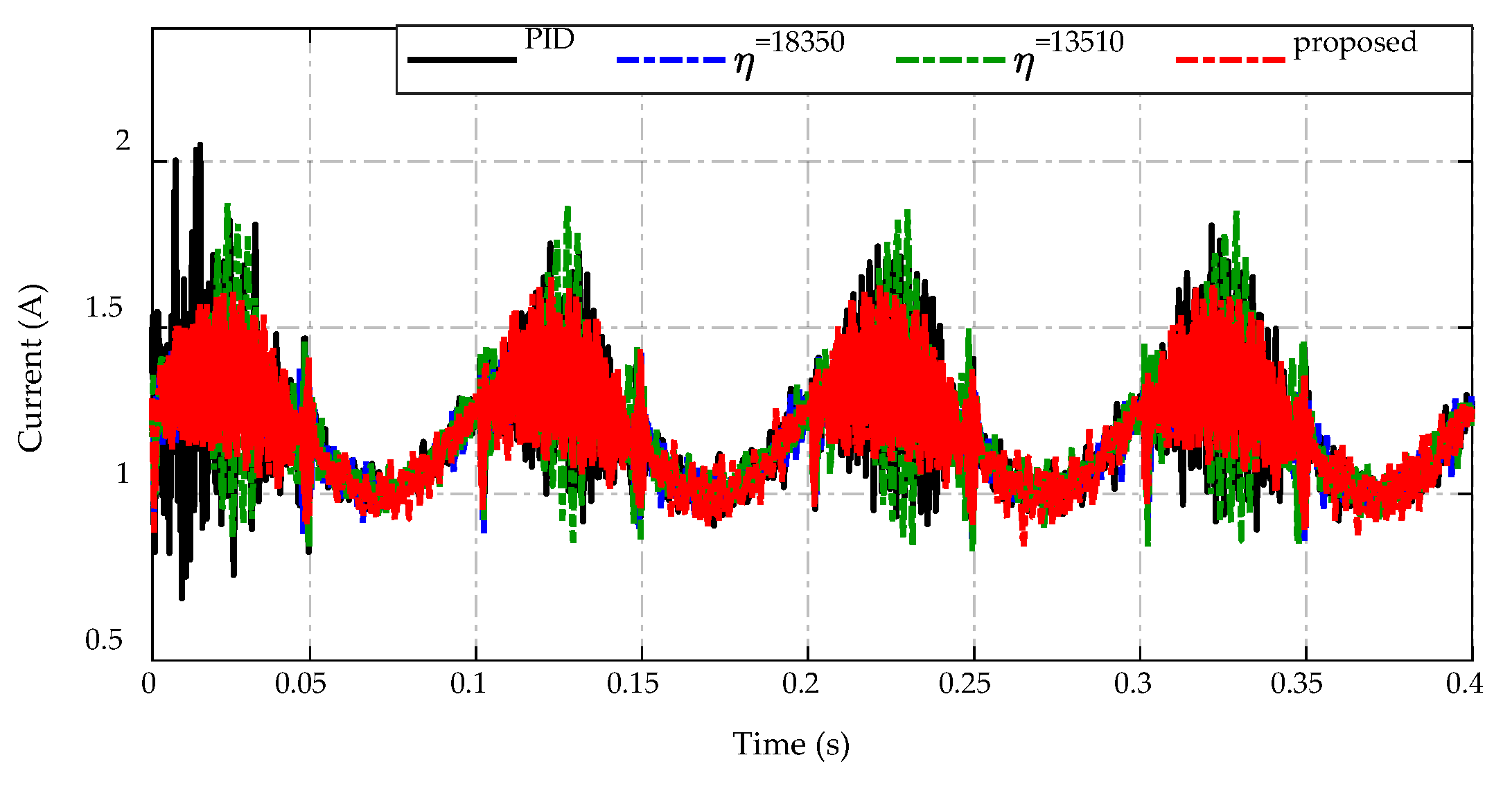
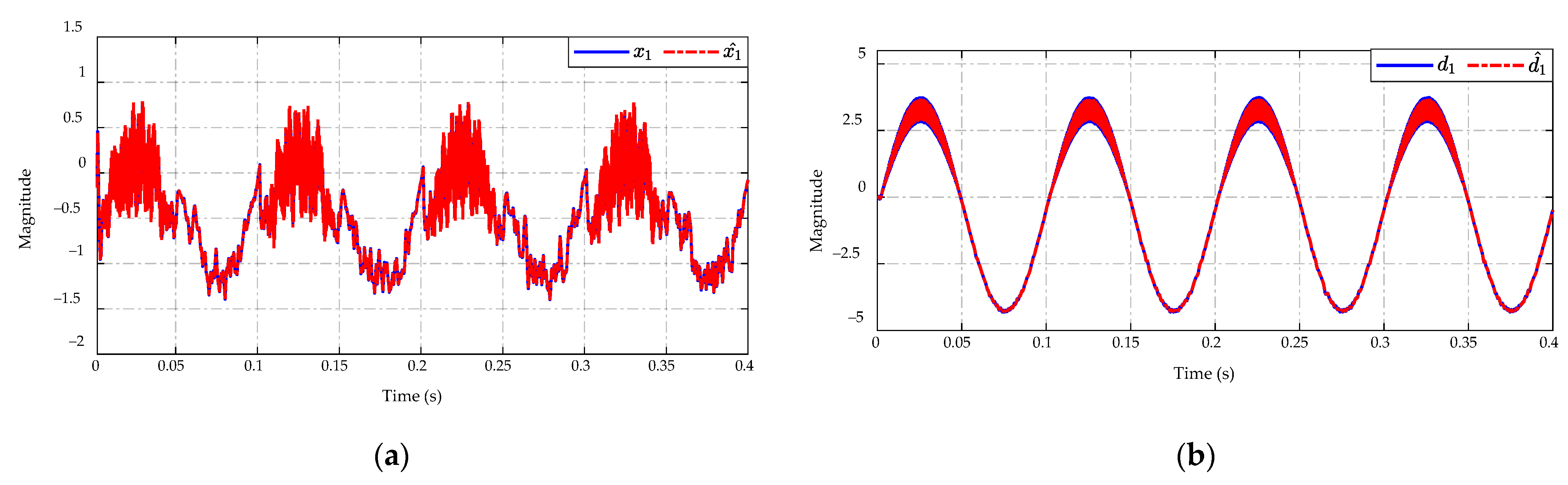
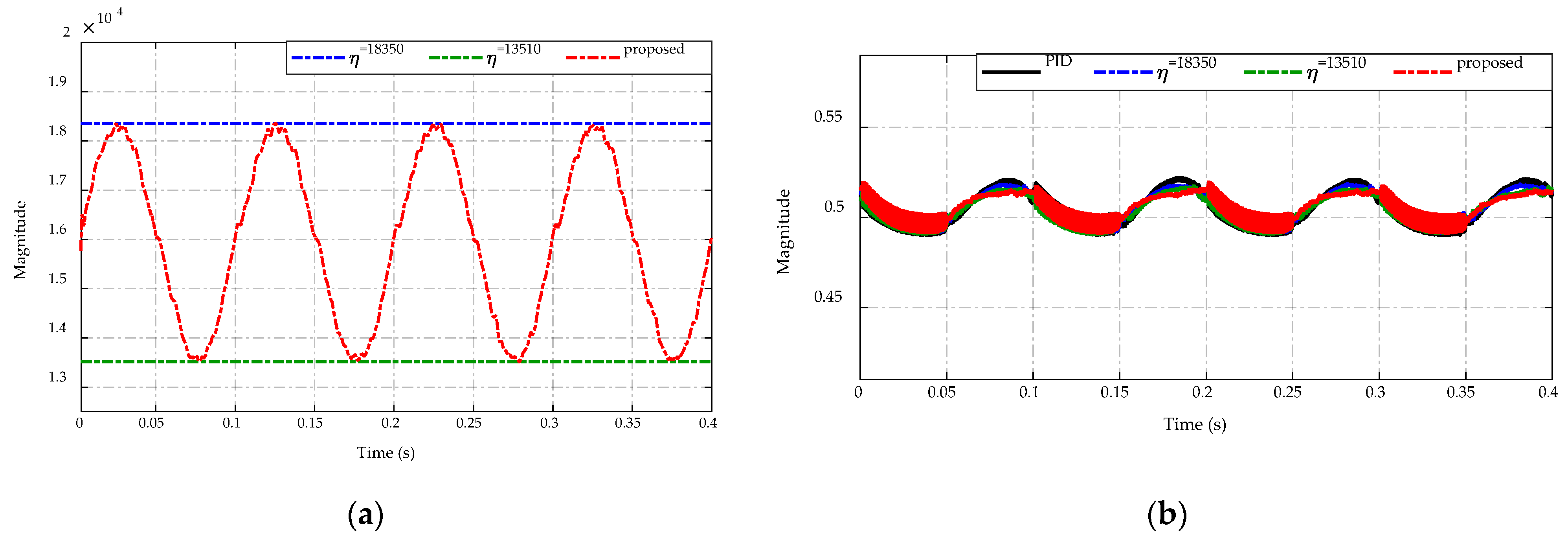
4.2.1. Load Resistance Variations
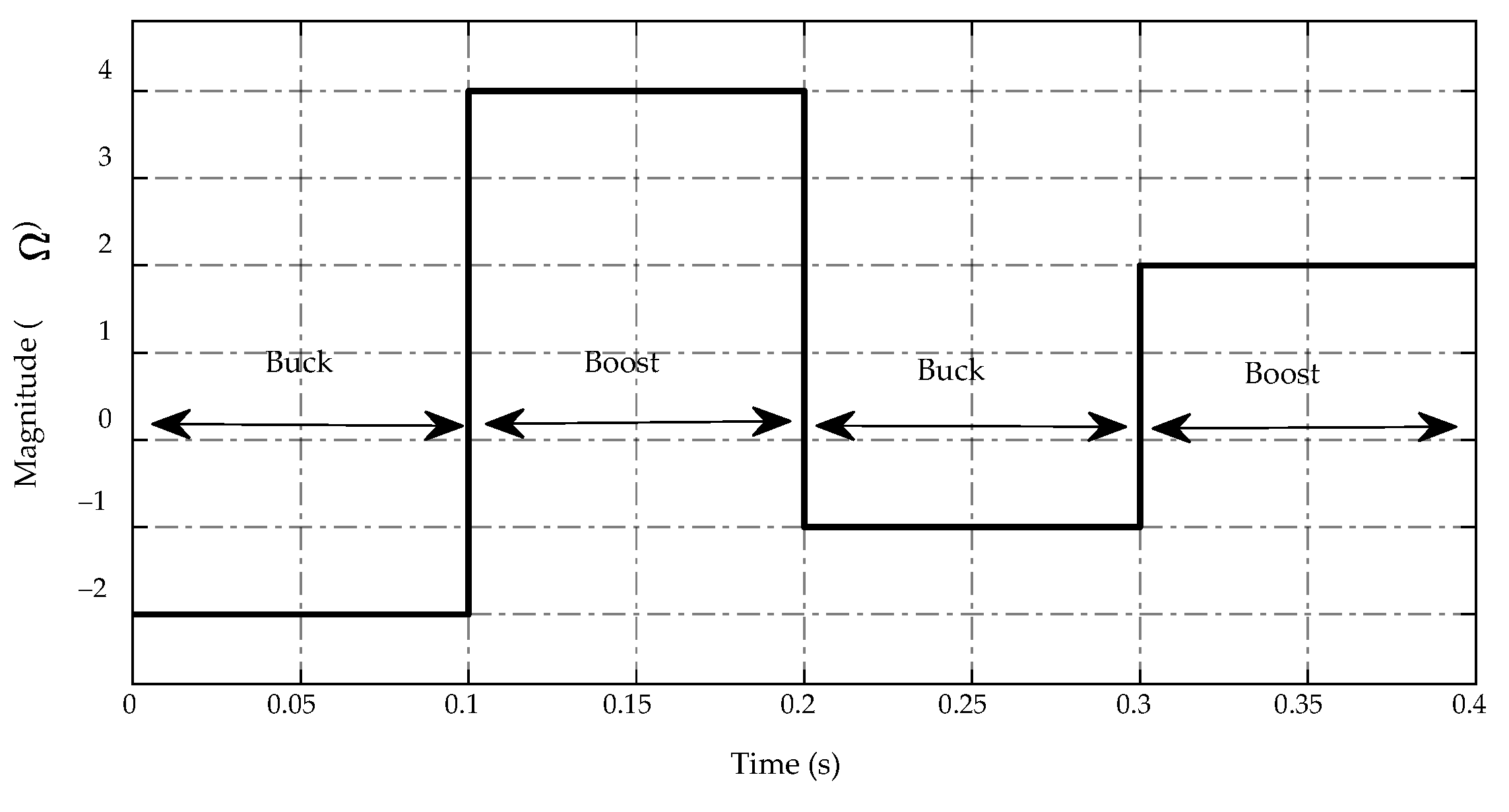
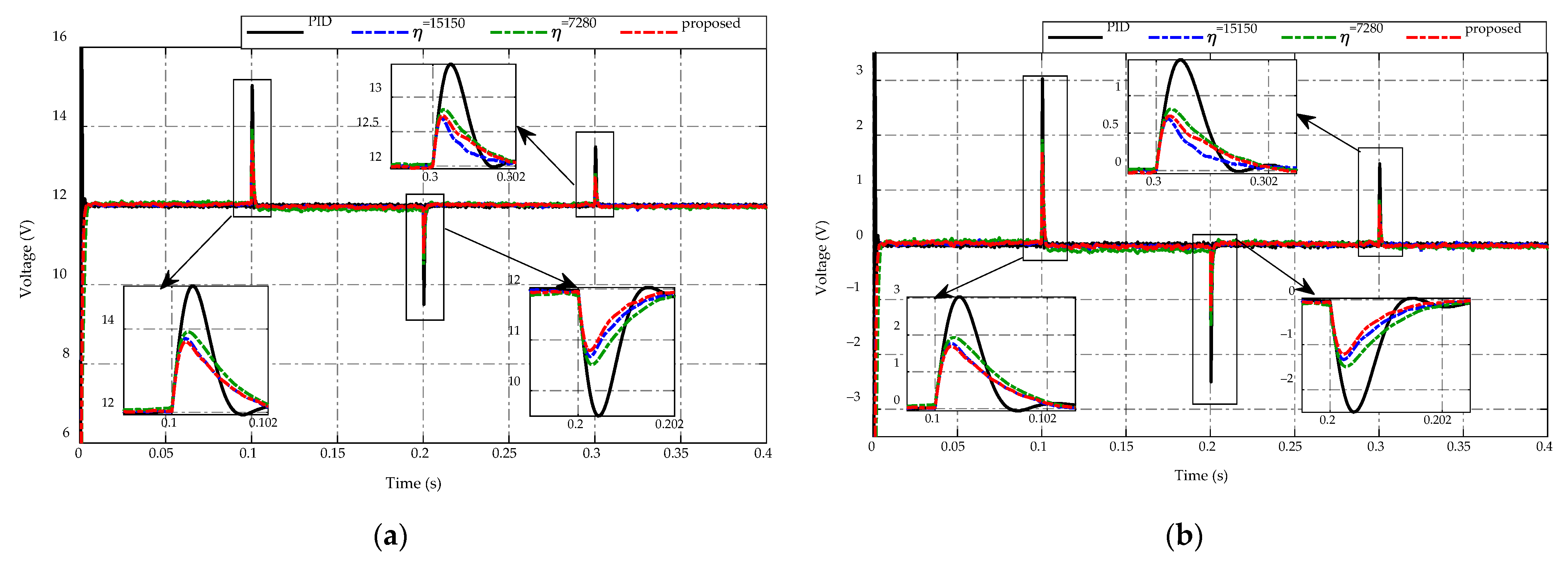
4.2.2. Buck/Boost Mode Switching
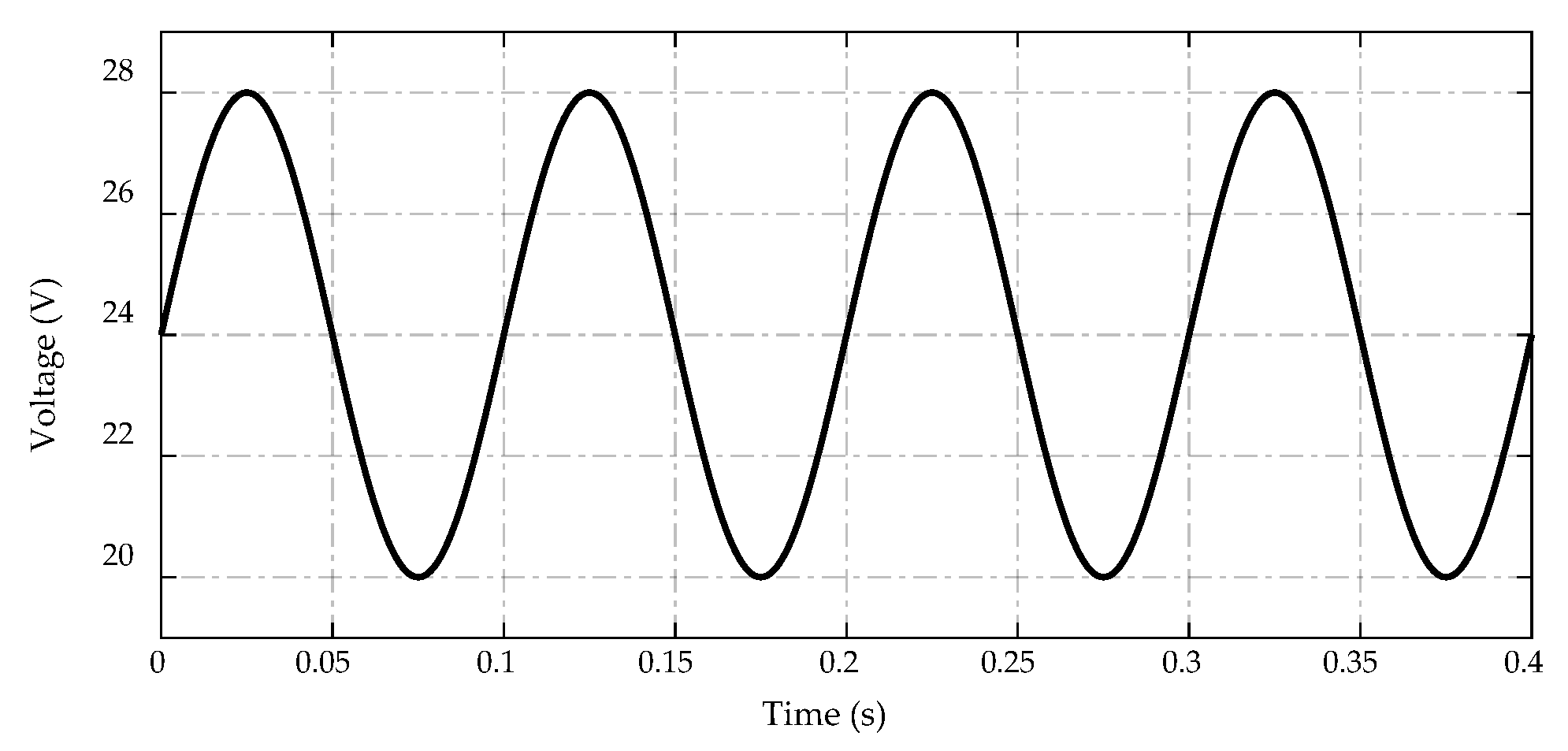
4.2.3. Input Voltage Variation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vadivel, S.; Ragupathy, U.S. Modeling and Design of High Performance Converters for Optimal Utilization of Interconnected Renewable Energy Resources to Micro Grid with GOLRS Controller. Int. J. Control Autom. Syst. 2021, 19, 63–75. [Google Scholar] [CrossRef]
- Li, X.; Jiang, W.; Wang, J.; Wang, P.; Wu, X. An Autonomous Control Scheme of Global Smooth Transitions for Bidirectional DC-DC Converter in DC Microgrid. IEEE Trans. Energy Convers. 2021, 36, 950–960. [Google Scholar] [CrossRef]
- Lai, C.; Cheng, Y.; Hsieh, M.; Lin, Y. Development of a Bidirectional DC/DC Converter with Dual-Battery Energy Storage for Hybrid Electric Vehicle System. IEEE Trans. Veh. Technol. 2018, 67, 1036–1052. [Google Scholar] [CrossRef]
- Ramírez-Murillo, H.; Restrepo, C.; Konjedic, T.; Calvente, J.; Romero, A.; Baier, C.R.; Giral, R. An Efficiency Comparison of Fuel-Cell Hybrid Systems Based on the Versatile Buck–Boost Converter. IEEE Trans. Power Electron. 2018, 33, 1237–1246. [Google Scholar] [CrossRef]
- Callegaro, L.; Ciobotaru, M.; Pagano, D.J.; Fletcher, J.E. Feedback Linearization Control in Photovoltaic Module Integrated Converters. IEEE Trans. Power Electron. 2019, 34, 6876–6889. [Google Scholar] [CrossRef]
- Housseini, B.; Okou, A.F.; Beguenane, R. Robust Nonlinear Controller Design for On-Grid/Off-Grid Wind Energy Battery-Storage System. IEEE Trans. Smart Grid 2018, 9, 5588–5598. [Google Scholar] [CrossRef]
- Wu, J.; Lu, Y. Adaptive Backstepping Sliding Mode Control for Boost Converter with Constant Power Load. IEEE Access 2019, 7, 50797–50807. [Google Scholar] [CrossRef]
- Hao, X.; Salhi, I.; Laghrouche, S.; Amirat, Y.A.; Djerdir, A. Backstepping Super-Twisting control of Four-Phase Interleaved Boost Converter for PEM Fuel Cell. IEEE Trans. Power Electron. 2022, 37, 7858–7870. [Google Scholar] [CrossRef]
- Nam, N.N.; Kim, S.H. Robust Tracking Control of Dual-Active-Bridge DC–DC Converters with Parameter Uncertainties and Input Saturation. Mathematics 2022, 10, 4719. [Google Scholar]
- Sankar, R.S.R.; Deepika, K.K.; Alsharef, M.; Alamri, B. A Smart ANN-Based Converter for Efficient Bidirectional Power Flow in Hybrid Electric Vehicles. Electronics 2022, 11, 3564. [Google Scholar] [CrossRef]
- Hoang, K.D.; Lee, H. Accurate Power Sharing with Balanced Battery State of Charge in Distributed DC Microgrid. IEEE Trans. Ind. Electron. 2019, 66, 1883–1893. [Google Scholar] [CrossRef]
- Sekhar, P.C.; Krishna, U.V. Voltage Ripple Mitigation in DC Microgrid with Constant Power Loads. IFAC-Pap. 2019, 52, 300–305. [Google Scholar] [CrossRef]
- Mishra, H.; Ray, S.; Dixit, T.V. Design of Double Loop CDM Controllers for Proton Exchange Membrane Fuel Cell Fed DC-DC Boost Converter Under Wide Source and Load Variations. Int. J. Control Autom. Syst. 2021, 19, 1873–1881. [Google Scholar] [CrossRef]
- Jeung, Y.; Lee, D. Voltage and Current Regulations of Bidirectional Isolated Dual-Active-Bridge DC–DC Converters Based on a Double-Integral Sliding Mode Control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- Oucheriah, S.; Guo, L. PWM-Based Adaptive Sliding-Mode Control for Boost DC–DC Converters. IEEE Trans. Ind. Electron. 2013, 60, 3291–3294. [Google Scholar] [CrossRef]
- Qi, Q.; Ghaderi, D.; Guerrero, J.M. Sliding mode controller-based switched-capacitor-based high DC gain and low voltage stress DC-DC boost converter for photovoltaic applications. Int. J. Electr. Power Energy Syst. 2021, 125, 106496. [Google Scholar] [CrossRef]
- Zawaideh, A.A.; Boiko, I.M. Analysis of Stability and Performance of a Cascaded PI Sliding-Mode Control DC–DC Boost Converter via LPRS. IEEE Trans. Power Electron. 2022, 37, 10455–10465. [Google Scholar] [CrossRef]
- Liu, S.; Liu, X.; Jiang, S.; Zhao, Z.; Wang, N.; Liang, X.; Zhang, M.; Wang, L. Application of an Improved STSMC Method to the Bidirectional DC-DC Converter in Photovoltaic DC Microgrid. Energies 2022, 15, 1636. [Google Scholar] [CrossRef]
- Ling, R.; Maksimovic, D.; Leyva, R. Second-Order Sliding-Mode Controlled Synchronous Buck DC–DC Converter. IEEE Trans. Power Electron. 2016, 31, 2539–2549. [Google Scholar] [CrossRef]
- Inomoto, R.S.; Monteiro, J.R.B.d.A.; Filho, A.J.S. Boost Converter Control of PV System Using Sliding Mode Control with Integrative Sliding Surface. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 5522–5530. [Google Scholar] [CrossRef]
- Wang, Z.; Li, S.; Li, Q. Discrete-Time Fast Terminal Sliding Mode Control Design for DC–DC Buck Converters with Mismatched Disturbances. IEEE Trans. Ind. Inform. 2020, 16, 1204–1213. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W.; Xue, C. Adaptive Continuous Sliding Mode Control of Buck Converters with Multidisturbances Based on Zero-Crossing Detection. IEEE Access 2022, 10, 72643–72657. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. A Normalized Output Error-Based Sliding-Mode Controller for the DC–DC Cascade Boost Converter. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 92–96. [Google Scholar] [CrossRef]
- Radenkovic, M.S.; Krstic, M. Adaptive Control via Extremum Seeking: Global Stabilization and Consistency of Parameter Estimates. IEEE Trans. Autom. Control 2017, 62, 2350–2359. [Google Scholar] [CrossRef]
- Pandey, S.K.; Patil, S.L.; Chaskar, U.M.; Phadke, S.B. State and Disturbance Observer-Based Integral Sliding Mode Controlled Boost DC–DC Converters. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 1567–1571. [Google Scholar] [CrossRef]
- Errouissi, R.; Shareef, H.; Viswambharan, A.; Wahyudie, A. Disturbance-Observer-Based Feedback Linearization Control for Stabilization and Accurate Voltage Tracking of a DC–DC Boost Converter. IEEE Trans. Ind. Appl. 2022, 58, 6687–6700. [Google Scholar] [CrossRef]
- Zhuo, S.; Gaillard, A.; Xu, L.; Paire, D.; Gao, F. Extended State Observer-Based Control of DC–DC Converters for Fuel Cell Application. IEEE Trans. Power Electron. 2020, 35, 9923–9932. [Google Scholar] [CrossRef]
- Łakomy, K.; Madonski, R.; Dai, B.; Yang, J.; Kicki, P.; Ansari, M.; Li, S. Active Disturbance Rejection Control Design with Suppression of Sensor Noise Effects in Application to DC–DC Buck Power Converter. IEEE Trans. Ind. Electron. 2022, 69, 816–824. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Advanced Sliding Mode Control for Mechanical Systems; Springer: Berlin/Heidelberg, Germany, 2011; p. 356. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Birkhäuser: New York, NY, USA, 2014. [Google Scholar]
- Ariyur, K.B.; Krstić, M. Real-Time Optimization by Extremum-Seeking Control; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Tan, Y.; Nešić, D.; Mareels, I. On non-local stability properties of extremum seeking control. Automatica 2006, 42, 889–903. [Google Scholar] [CrossRef]
- Nešić, D. Extremum Seeking Control: Convergence Analysis. Eur. J. Control 2009, 15, 331–347. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Tran, D.T.; Jin, M.; Ahn, K.K. Nonlinear Extended State Observer Based on Output Feedback Control for a Manipulator with Time-Varying Output Constraints and External Disturbance. IEEE Access 2019, 7, 156860–156870. [Google Scholar] [CrossRef]
- Trinh, H.A.; Truong, H.V.A.; Ahn, K.K. Fault Estimation and Fault-Tolerant Control for the Pump-Controlled Electrohydraulic System. Electronics 2020, 9, 132. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| Battery source | ||
| Source internal resistor | ||
| High-side capacitor | ||
| MOSFET turn-on resistor | ||
| Inductor | L | |
| Series resistor | ||
| Low-side capacitor | ||
| Switching frequency | ||
| Reference low-side voltage |
| Observer/Controllers | Parameter |
|---|---|
| ESO | |
| PID | |
| CSMC |
| Description | Parameter | Value |
|---|---|---|
| Objective function (OF) gain | 0.01 | |
| OF error gain | ||
| OF sliding variable gain | 4 | |
| Forcing frequency | 10,125 | |
| Demodulation amplitude | a | 100 |
| Modulation amplitude | b | 0.05 |
| Learning rate | k | 226,800 |
| Initial condition | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trinh, H.-A.; Nguyen, D.G.; Phan, V.-D.; Duong, T.-Q.; Truong, H.-V.-A.; Choi, S.-J.; Ahn, K.K. Robust Adaptive Control Strategy for a Bidirectional DC-DC Converter Based on Extremum Seeking and Sliding Mode Control. Sensors 2023, 23, 457. https://doi.org/10.3390/s23010457
Trinh H-A, Nguyen DG, Phan V-D, Duong T-Q, Truong H-V-A, Choi S-J, Ahn KK. Robust Adaptive Control Strategy for a Bidirectional DC-DC Converter Based on Extremum Seeking and Sliding Mode Control. Sensors. 2023; 23(1):457. https://doi.org/10.3390/s23010457
Chicago/Turabian StyleTrinh, Hoai-An, Duc Giap Nguyen, Van-Du Phan, Tan-Quoc Duong, Hoai-Vu-Anh Truong, Sung-Jin Choi, and Kyoung Kwan Ahn. 2023. "Robust Adaptive Control Strategy for a Bidirectional DC-DC Converter Based on Extremum Seeking and Sliding Mode Control" Sensors 23, no. 1: 457. https://doi.org/10.3390/s23010457
APA StyleTrinh, H.-A., Nguyen, D. G., Phan, V.-D., Duong, T.-Q., Truong, H.-V.-A., Choi, S.-J., & Ahn, K. K. (2023). Robust Adaptive Control Strategy for a Bidirectional DC-DC Converter Based on Extremum Seeking and Sliding Mode Control. Sensors, 23(1), 457. https://doi.org/10.3390/s23010457