
Estimation of Longitudinal Force, Sideslip Angle and Yaw Rate for Four-Wheel Independent Actuated Autonomous Vehicles Based on PWA Tire Model

Abstract
:1. Introduction
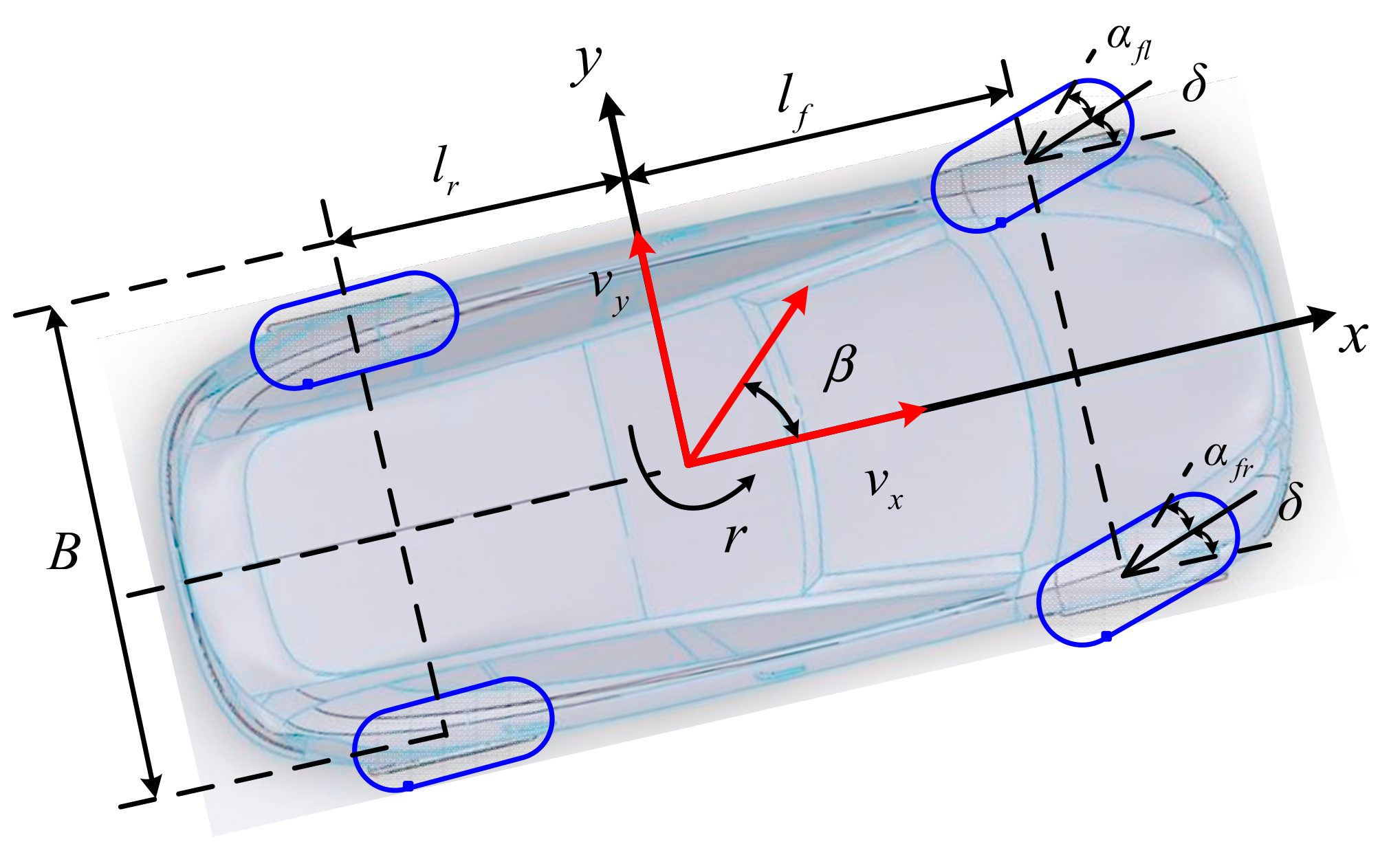
2. Vehicle Dynamics Modeling
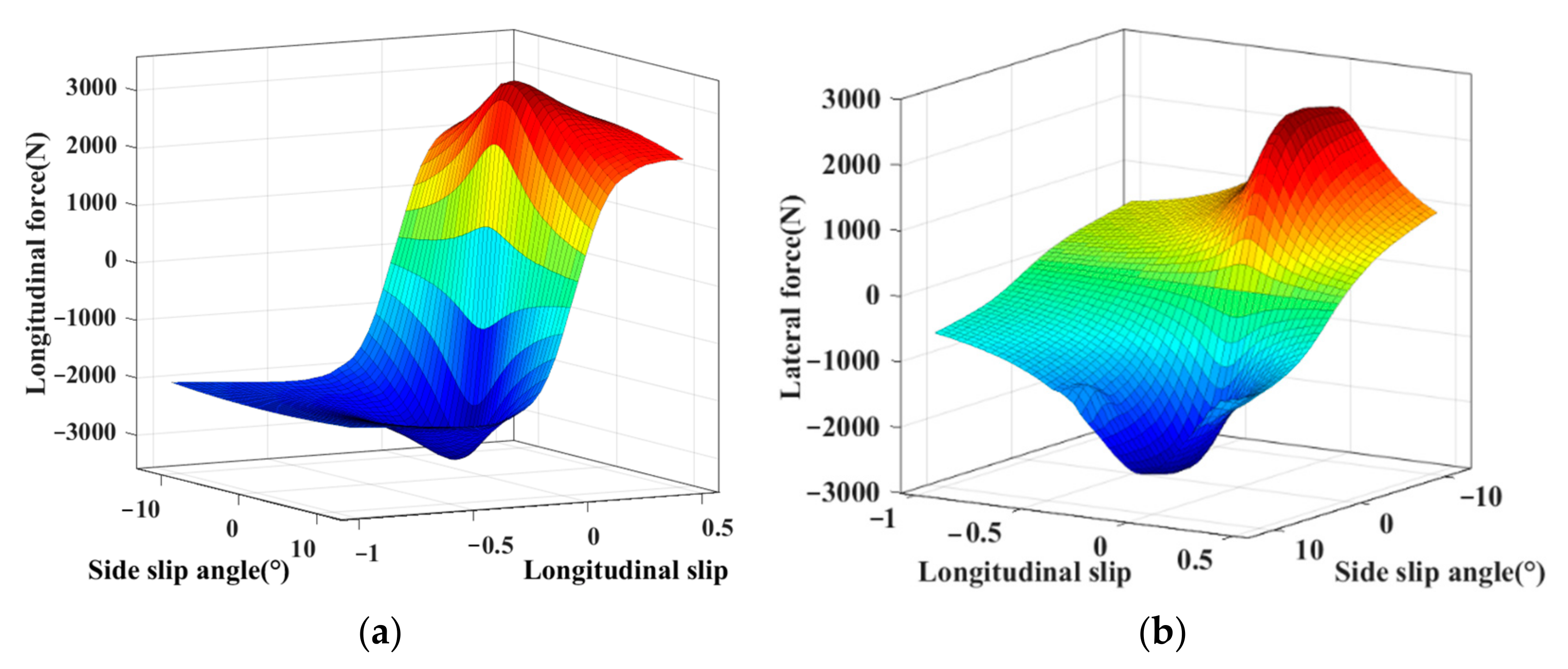
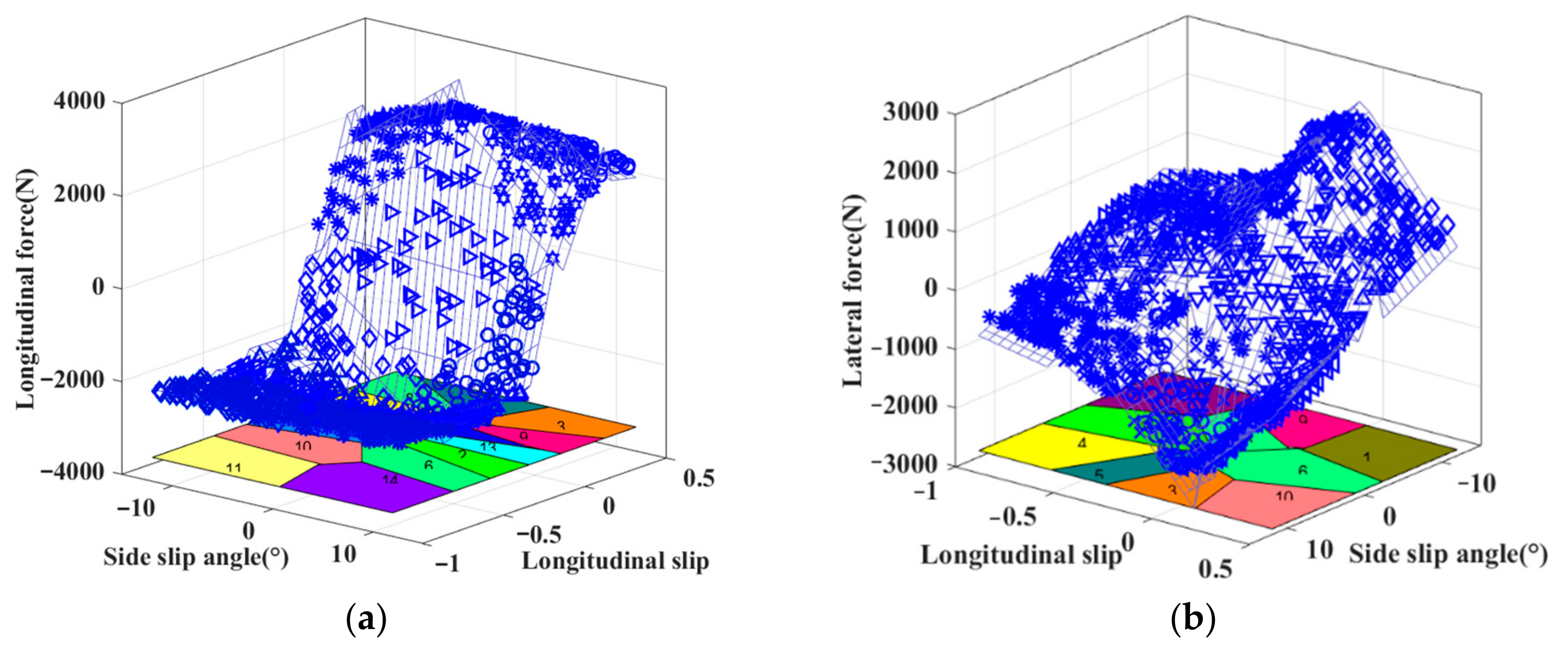
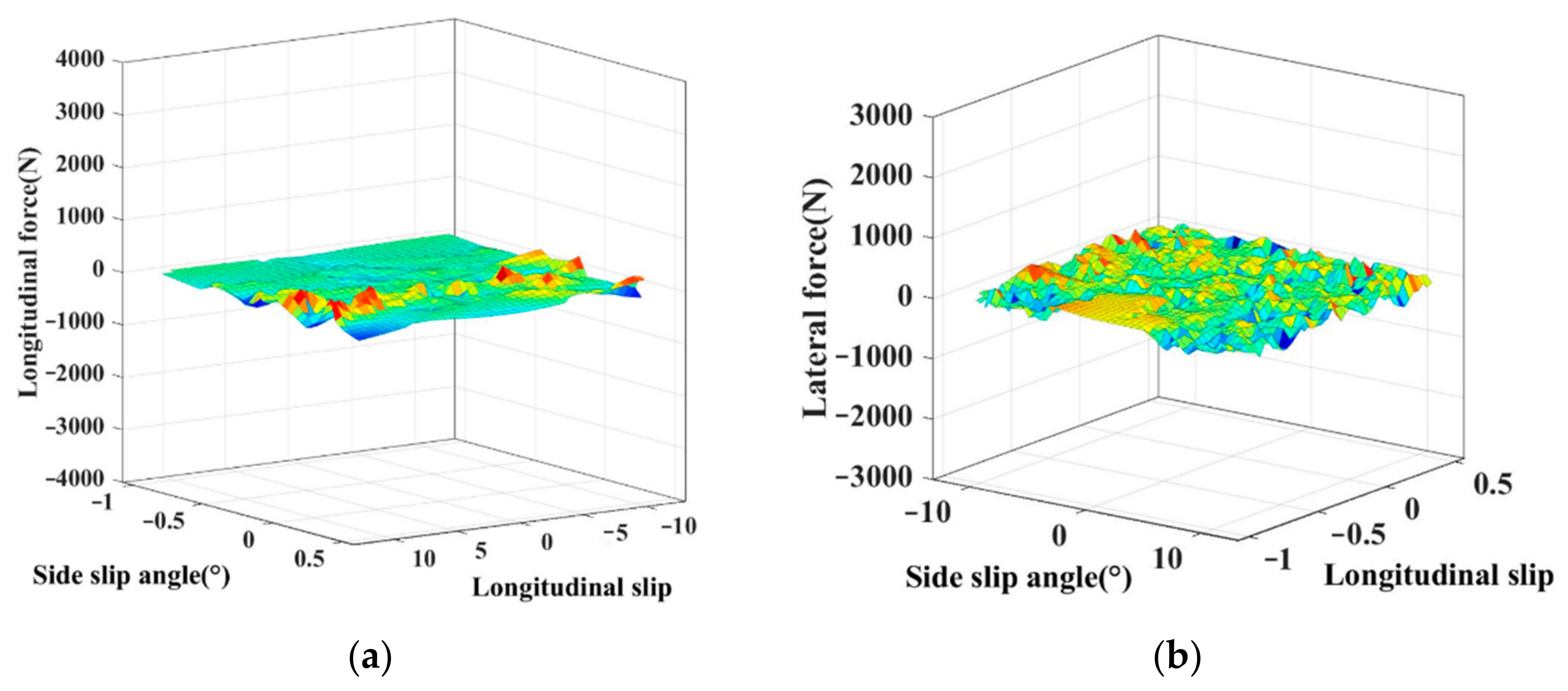
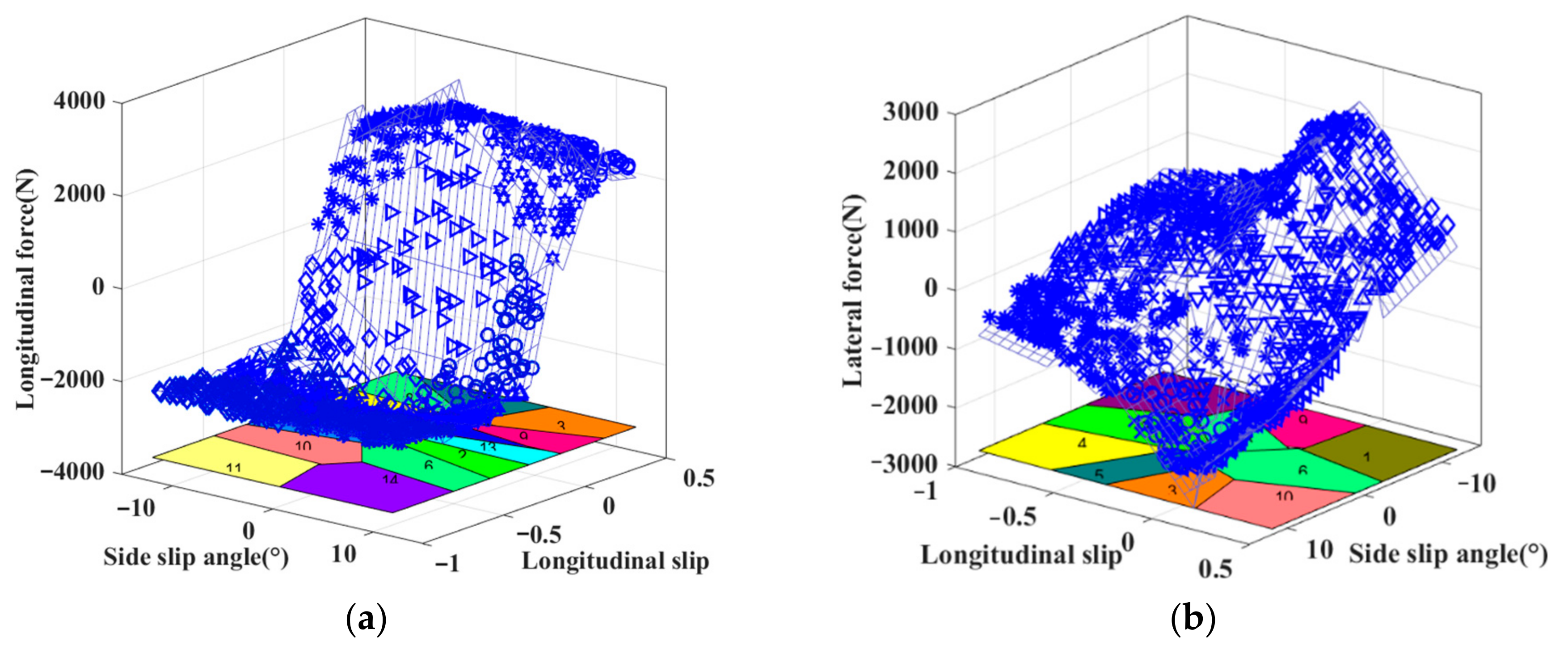
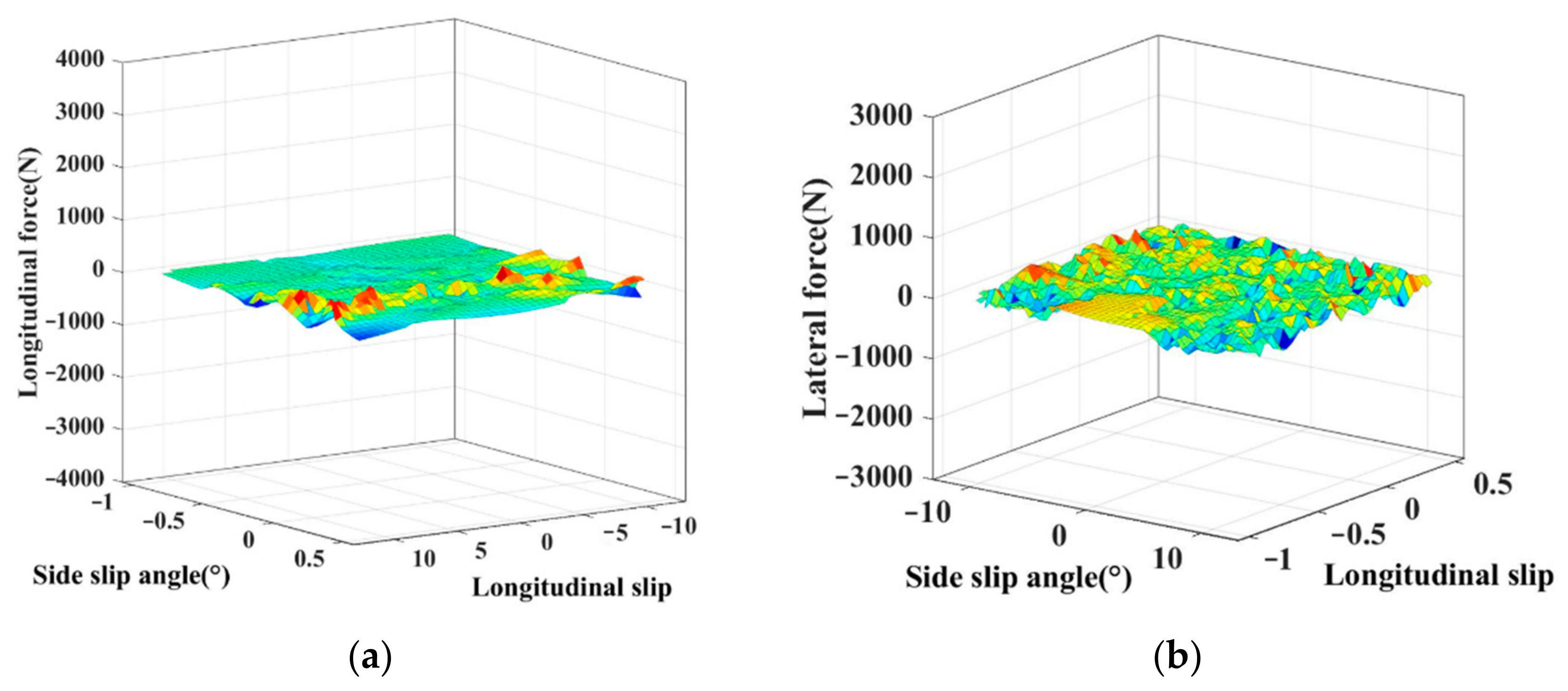
3. PWA Modeling of Tire Mechanical Properties under Combined Conditions
3.1. Data Clustering
| Algorithm 1. The Execution Process of the EM Algorithm |
| Step 1: Initialize and set the iteration counter l = 0 and set ε > 0. |
| Step 2: For , execute the following procedures: |
| (E-step): Calculate |
| (M-step): Update by computing |
| Step 3: If the prescribed convergence condition is satisfied, then set and exit. The optimal ML estimate of Φ is obtained by . Else set and go back to Step 2. |
3.2. Affine Submodel Parameters Estimation
3.3. Calculation of Hyperplane Coefficient Matrices
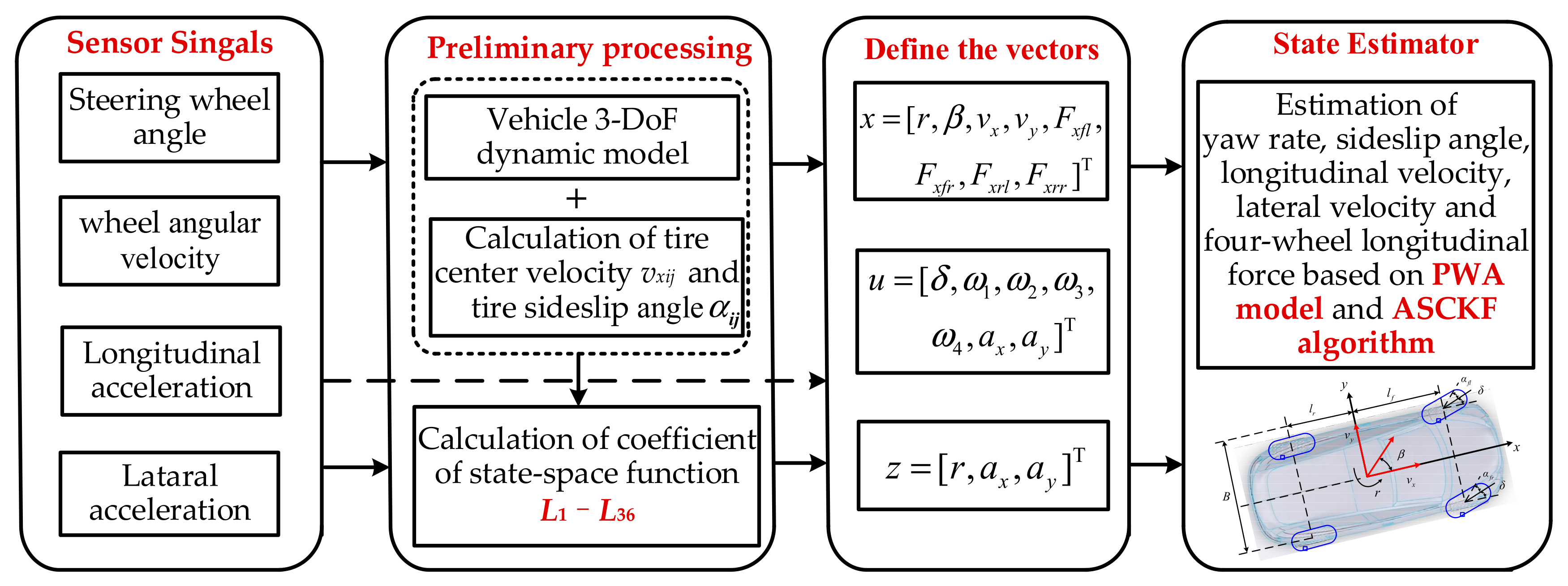
4. Vehicle State Estimation Based on Adaptive SCKF
4.1. Nonlinear State Space Equation of Vehicle Model
4.2. The Standard SCKF Algorithm
4.2.1. Initialization
4.2.2. Time Update
- The cubature points are calculated and transferred based on the state transition function:
- Calculate the predicted value of the state and the square-root factor of its error covariance matrix:
4.2.3. Measurement Update
- The cubature points are updated using the state prediction value and the square-root Sk|k−1 of the prediction error covariance at k time. After that, it is transferred based on the measurement function as follow:
- The square-root factor of the measured predicted value and its innovation covariance matrix can be calculated as:
- The measurement covariance matrix and cross covariance matrix are calculated as follow:
- Kalman gain matrix can be expressed as:
- Update the square-root factor of the state variable and error covariance matrix at k time:
4.3. Adaptive Square Cubature Kalman Filter (ASCKF)
5. The Simulation Analysis
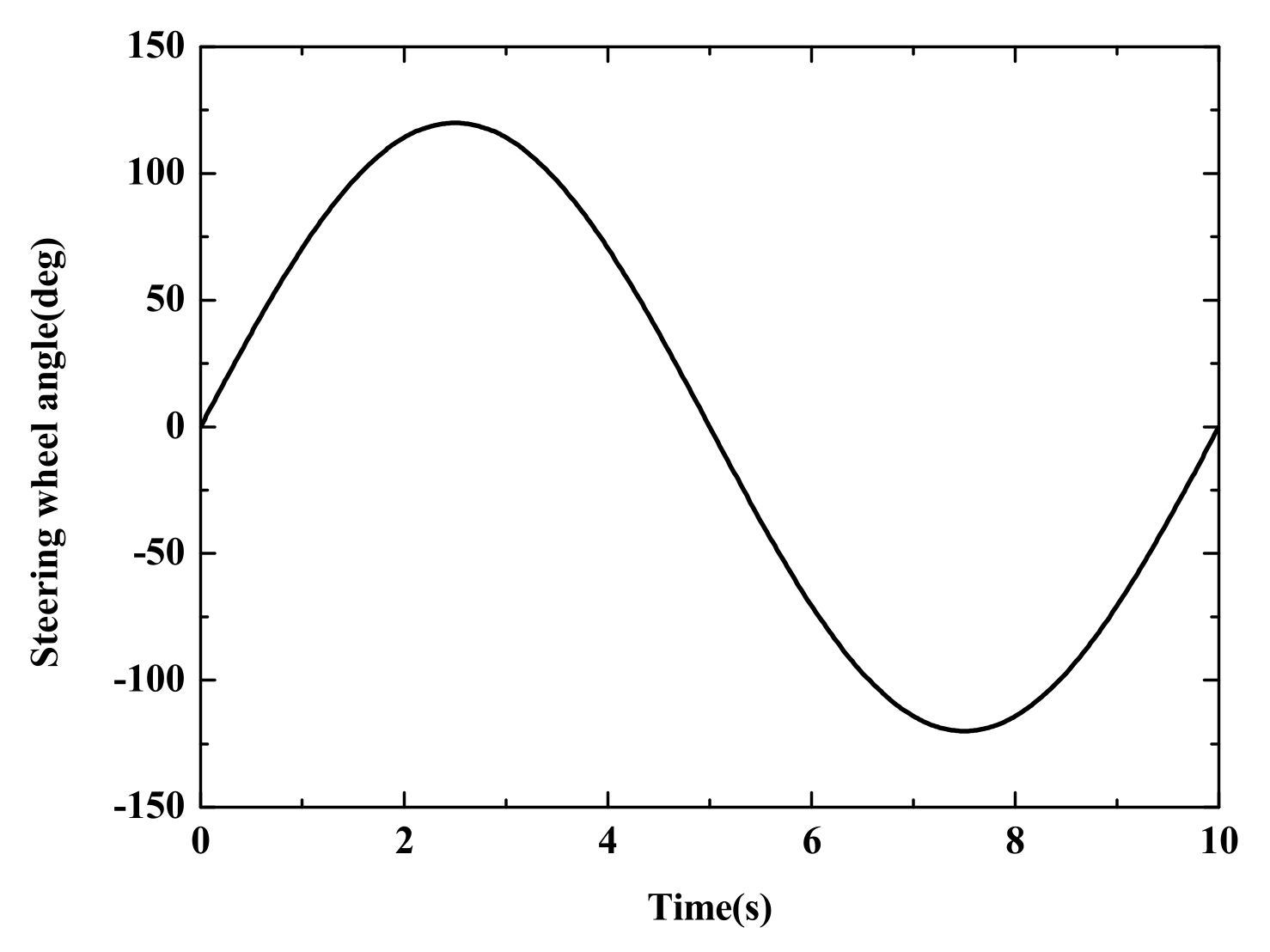
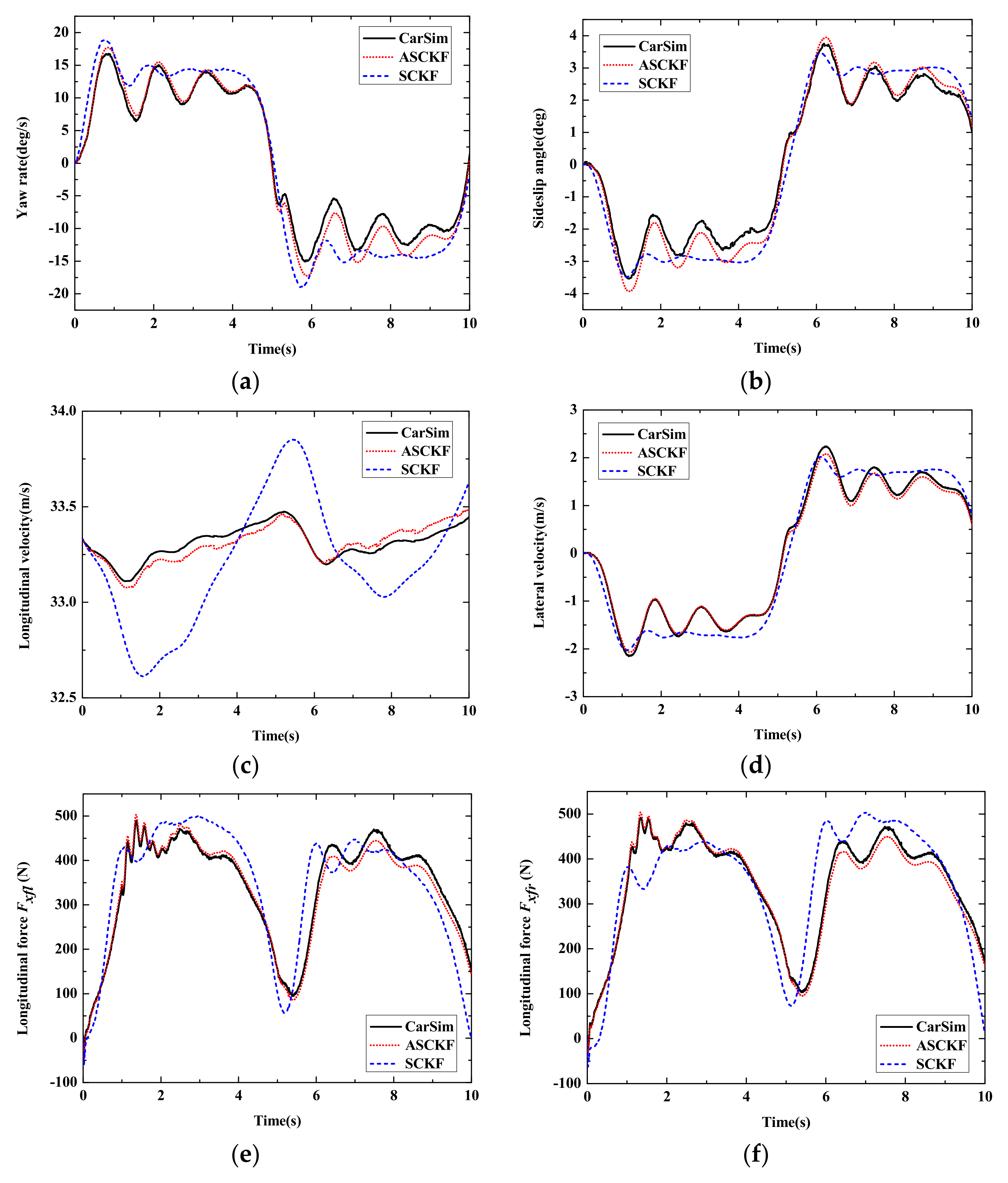
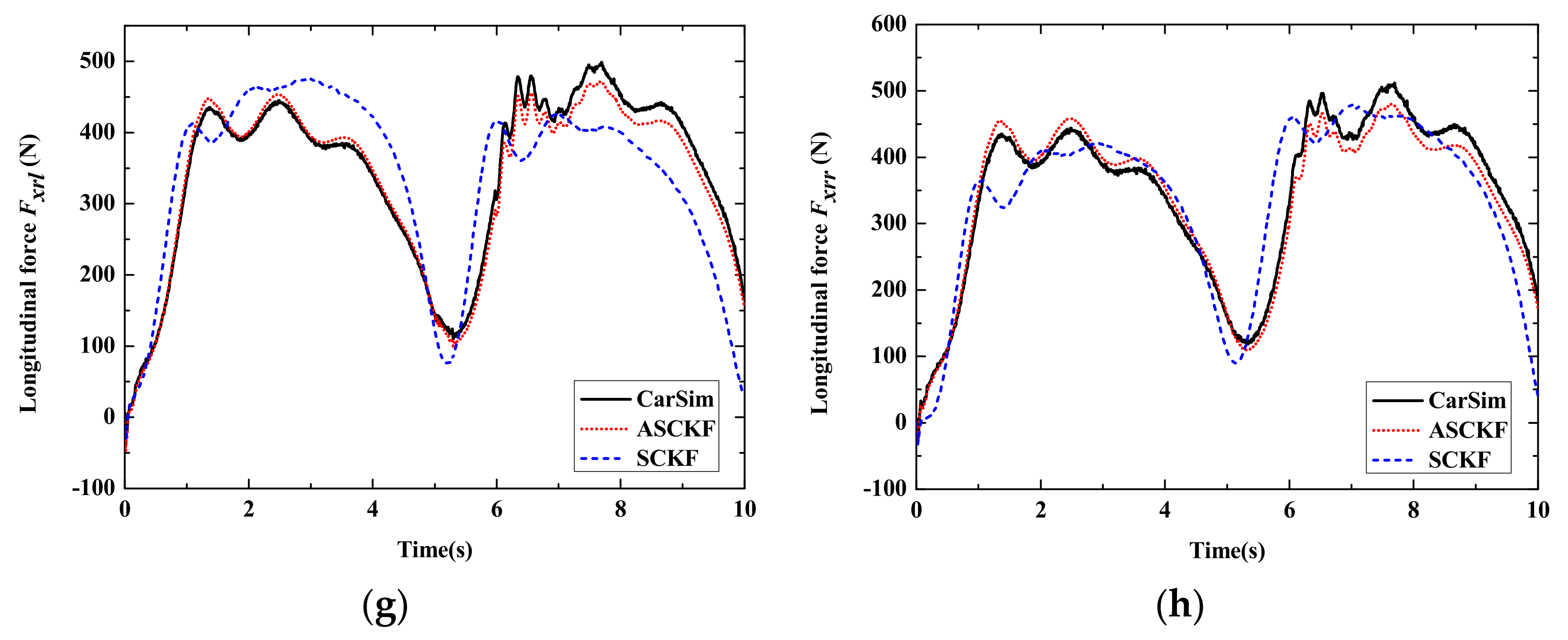
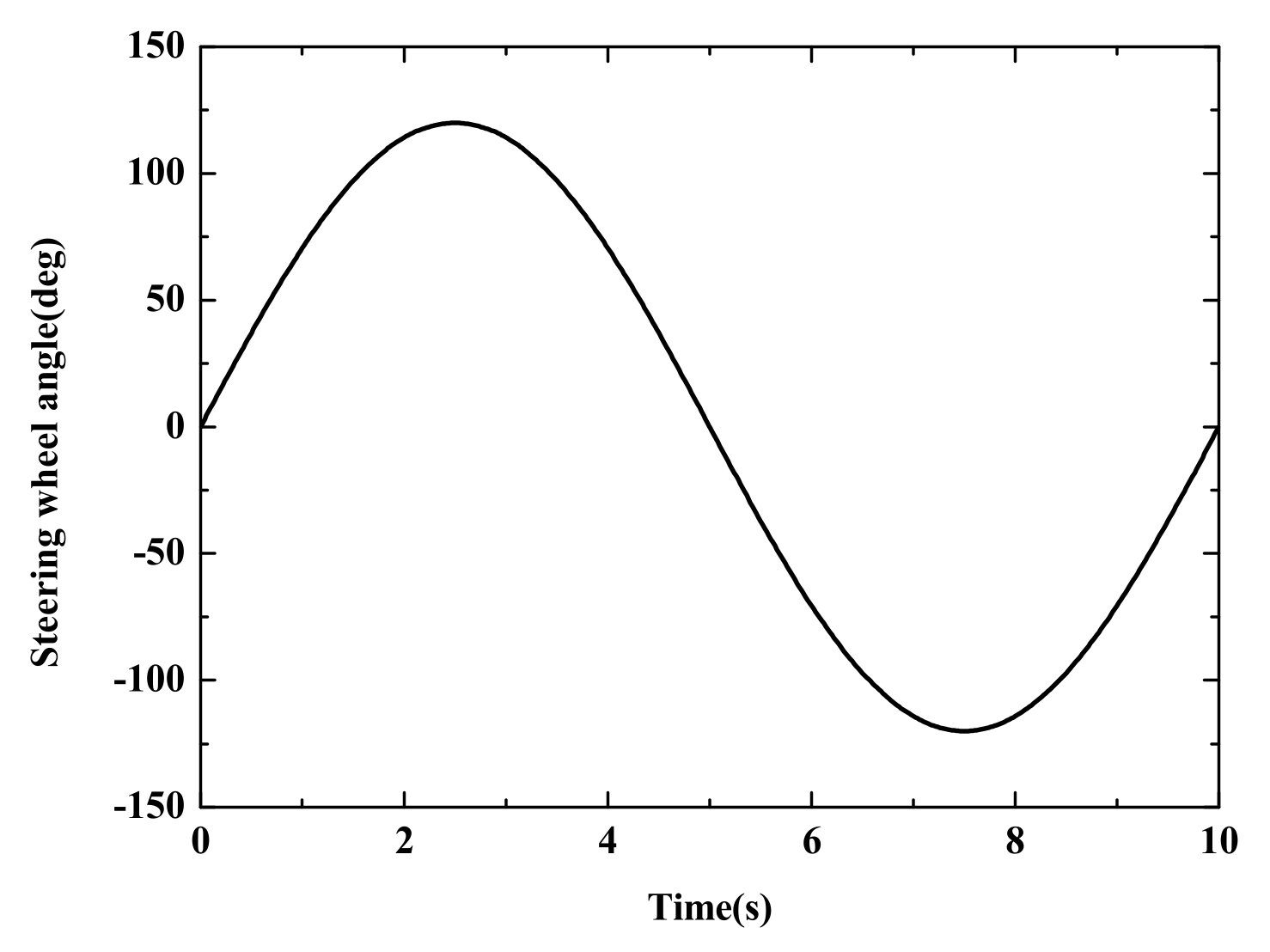
- Case 1: Simulation Results of Sine Steering Angle Input
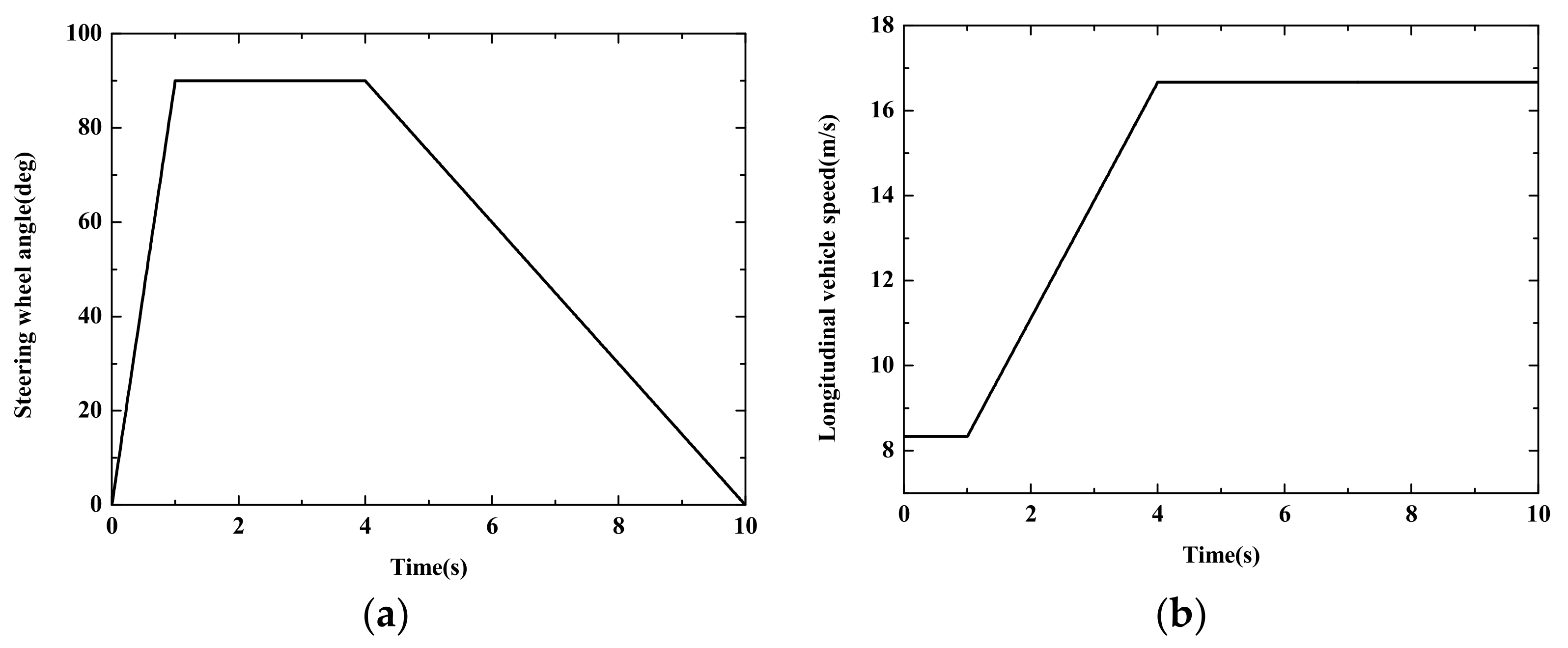
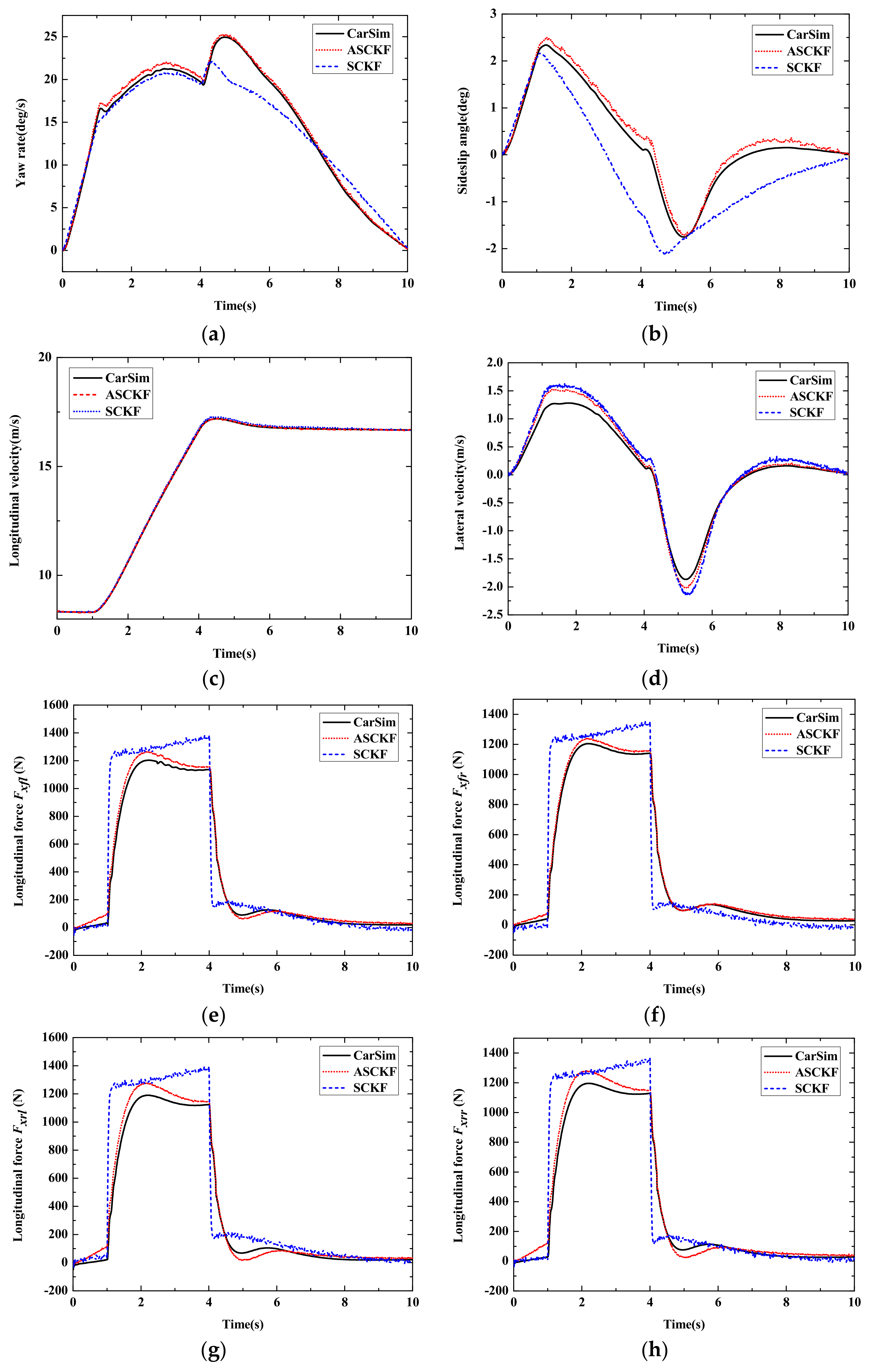
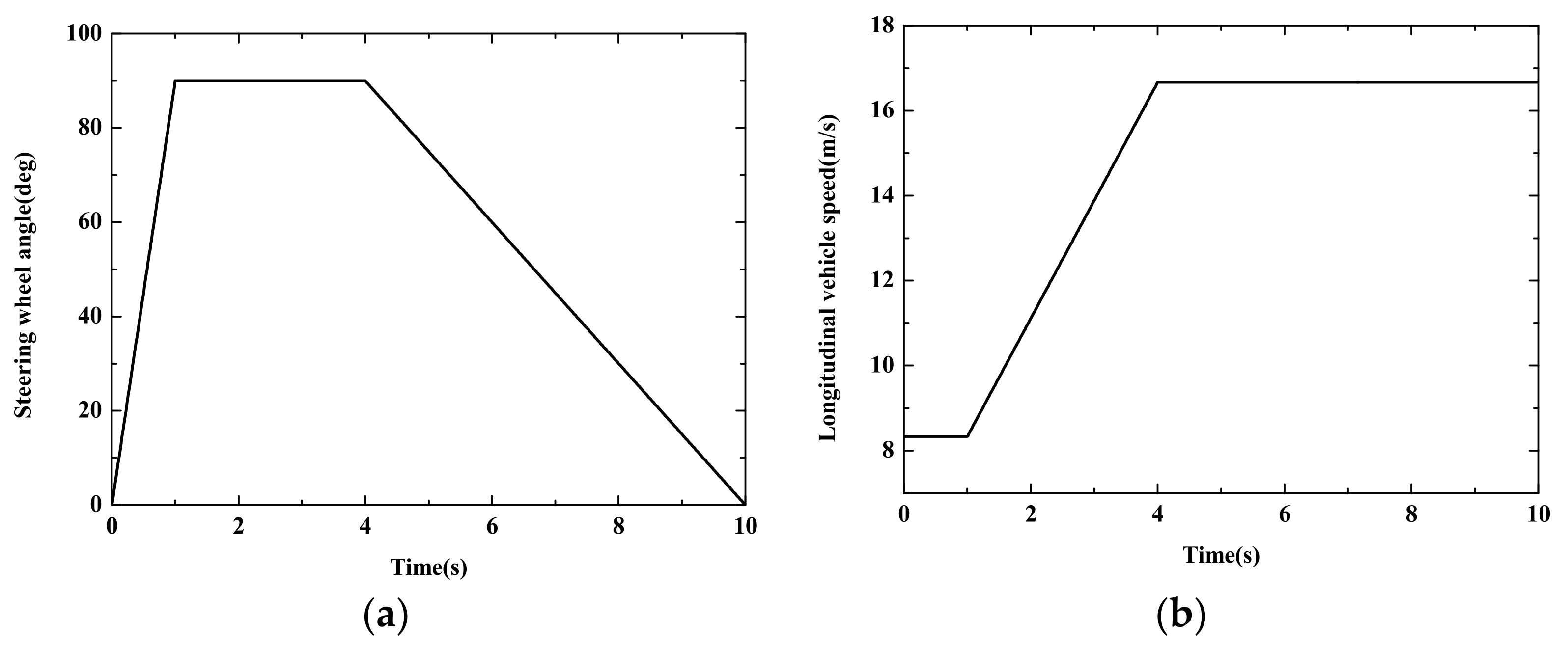
- Case 2: Simulation Results of J turn Input
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Liu, C.; Chau, K.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 11, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Yin, C.; Jiang, H.; Tang, B.; Zhu, C.; Lin, Z.; Yin, Y. Handling Stability and Energy-Saving of Commercial Vehicle Electronically Controlled Hybrid Power Steering System. J. Jiangsu Univ. Nat. Sci. 2019, 40, 269–275. [Google Scholar]
- Li, Y.; Wu, H.; Zhang, B. Frontier Techniques and Prospect of in-wheel motor for Electric Vehicle. J. Jiangsu Univ. Nat. Sci. 2019, 40, 261–268. [Google Scholar]
- Ma, Y.; Zhang, S.; Ding, N. Algorithm of AEB system for Commercial Vehicle in Curve Road. J. Jiangsu Univ. Nat. Sci. 2019, 40, 386–390. [Google Scholar]
- Wu, L.; Yang, J.; Wang, R.; Ye, Q.; Sun, Z. Global Path planning for Intelligent Vehicles Based on Hybrid SA algorithm. J. Jiangsu Univ. Nat. Sci. 2019, 40, 249–254. [Google Scholar]
- Luo, Y.; Chen, T.; Zhang, S.; Li, K. Intelligent Hybrid Electric Vehicle ACC With Coordinated Control of Tracking Ability, Fuel Economy, and Ride Comfort. IEEE Trans. Intell. Transp. 2015, 4, 2303–2308. [Google Scholar] [CrossRef]
- Fu, X.; Yang, F.; Huang, B.; He, Z.; Pei, B. Coordinated Control of Active Rear Wheel Steering and Four Wheel Independent Driving Vehicle. J. Jiangsu Univ. Nat. Sci. 2021, 42, 497–505. [Google Scholar]
- Wang, H.; Xu, K.; Cai, Y. Trajectory Planning for Lane Changing of Intelligent Vehicles under Multiple Operating Conditions. J. Jiangsu Univ. Nat. Sci. 2019, 40, 255–260. [Google Scholar]
- Wang, Y.; Deng, W.; Zhang, S.; Zhang, Y. A lane departure warning system developed under a virtual environment. In Proceedings of the 2014 International Conference on Informative and Cybernetics for Computational Social Systems (ICCSS), Qingdao, China, 9–10 October 2014; pp. 63–67. [Google Scholar]
- Jiang, H.; Wang, C.; Ma, S.; Chen, J.; Hua, Y. Parking Slot Recognition of Automatic Parking System Based on Image Gradient Matching. J. Jiangsu Univ. Nat. Sci. 2020, 41, 621–626. [Google Scholar]
- Yuan, C.; Song, J.; He, Y.; Jie, S.; Chen, L.; Weng, S. Active Collision Avoidance Algorithm of Autonomous Vehicle Based on Pedestrian Trajectory Prediction. J. Jiangsu Univ. Nat. Sci. 2021, 42, 1–8. [Google Scholar]
- Li, M.; He, R. Optimization design and performance analysis of dual-rotor in-wheel motor based on parameter sensitivity. J. Jiangsu Univ. Nat. Sci. 2020, 41, 640–647. [Google Scholar]
- Gu, N.; Wang, D.; Peng, Z.; Liu, L. Observer-Based Finite-Time Control for Distributed Path Maneuvering of Underactuated Unmanned Surface Vehicles with Collision Avoidance and Connectivity Preservation. IEEE Trans. Syst. Man Cybern. Syst. 2021, 8, 5105–5115. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, S.; Ren, H.; Gao, Z.; Liu, Z. Path Tracking and Handling Stability Control Strategy with Collision Avoidance for the Autonomous Vehicle Under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 12, 14602–14617. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Wang, W. Cooperative Control Framework for Human Driver and Active Rear Steering System to Advance Active Safety. IEEE Trans. Intell. Veh. 2021, 3, 460–469. [Google Scholar] [CrossRef]
- Zhang, Z.; Ling, Z.; Wu, H. An estimation scheme of road friction coefficient based on novel type model and improved SCKF. Veh. Syst. Dyn. 2021, 12, 1–30. [Google Scholar]
- Sun, X.; Wang, Y.; Hu, W.; Cai, Y.; Huang, C.; Chen, L. Path tracking control strategy for the intelligent vehicle considering tire nonlinear cornering characteristics in the PWA form. J. Franklin Inst. 2022, 6, 2487–2513. [Google Scholar] [CrossRef]
- Dias, J.; Pereira, G.; Palhares, R. Longitudinal Model Identification and Velocity Control of an Autonomous Car. IEEE Trans. Intell. Transp. Syst. 2015, 2, 776–786. [Google Scholar] [CrossRef]
- Li, S.; Gao, F.; Cao, D.; Li, K. Multiple-Model Switching Control of Vehicle Longitudinal Dynamics for Platoon-Level Automation. IEEE Trans. Veh. Technol. 2016, 6, 4480–4492. [Google Scholar] [CrossRef]
- Hsiao, T. Robust Wheel Torque Control for Traction/Braking Force Tracking Under Combined Longitudinal and Lateral Motion. IEEE Trans. Intell. Transp. Syst. 2015, 3, 1335–1347. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Jiang, H.; Sun, X. Design of Vehicle Running States-Fused Estimation Strategy Using Kalman Filters and Tire Force Compensation Method. IEEE Access 2019, 7, 87273–87287. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, S.; Yan, Y.; Yu, X. An EKF-Based Fast Tube MPC Scheme for Moving Target Tracking of a Redundant Underwater Vehicle-Manipulator System. IEEE/ASME Trans. Mechatron. 2019, 6, 2803–2814. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Yang, D.; Xu, X. An IMM-UKF Aided SINS/USBL Calibration Solution for Underwater Vehicles. IEEE Trans. Veh. Technol. 2020, 4, 3740–3747. [Google Scholar] [CrossRef]
- Sabet, M.T.; Daniali, H.M.; Fathi, A.; Alizadeh, E. Identification of an Autonomous Underwater Vehicle Hydrodynamic Model Using the Extended, Cubature, and Transformed Unscented Kalman Filter. IEEE J. Ocean. Eng. 2018, 2, 457–467. [Google Scholar] [CrossRef]
- Li, L.; Yang, M.; Wang, C.; Wang, B. Rigid Point Set Registration Based on Cubature Kalman Filter and Its Application in Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 6, 1754–1765. [Google Scholar] [CrossRef]
- Zhang, Z.; Ji, L.; Huang, Z.; Wu, J. Adaptive Information Fusion for Human Upper Limb Movement Estimation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 5, 1100–1108. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Cai, Y.; Xu, X. Robust sideslip angle observer with regional stability constraint for an uncertain singular intelligent vehicle system. IET Control Theory Appl. 2018, 13, 1802–1811. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, J.; Lei, Z. Vehicle sideslip angle estimation for a four-wheel-independent-drive electric vehicle based on a hybrid estimator and a moving polynomial Kalman smoother. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 233, 125–140. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Chen, J. Fusion Algorithm Design Based on Adaptive SCKF and Integral Correction for Side-Slip Angle Observation. IEEE Trans. Intell. Transp. 2018, 7, 5754–5763. [Google Scholar] [CrossRef]
- Cheng, S.; Li, C.; Chen, X. A hierarchical estimation scheme of tire-force based on random-walk SCKF for vehicle dynamics control. J. Frankl. Inst. 2020, 18, 13964–13985. [Google Scholar] [CrossRef]
- Zhang, A.; Bao, S.; Bi, W.; Yuan, Y. Low-cost adaptive square-root cubature Kalman filter for systems with process model uncertainty. J. Syst. Eng. Electron. 2016, 5, 945–953. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Z.; Chen, X. Generalized Dynamic Fuzzy NN Model Based on Multiple Fading Factors SCKF and its Application in Integrated Navigation. IEEE Sens. J. 2021, 3, 3680–3693. [Google Scholar] [CrossRef]
- Hong, Z.; Zheng, B.; Chen, J.; Huang, X. Rut threshold of asphalt pavement based on vehicle driving stability. J. Jiangsu Univ. Nat. Sci. 2020, 41, 718–725. [Google Scholar]
- Zhang, J.; Wang, T.; Wang, L.; Zou, X.; Song, W. Optimization control strategy of driving torque for slope-crossing of pure electric vehicles. J. Jiangsu Univ. Nat. Sci. 2021, 42, 506–512. [Google Scholar]
- Li, S.; Ding, X.; Yu, B. Optimal control strategy of efficiency for dual motor coupling drive system of pure electric vehicle. J. Jiangsu Univ. Nat. Sci. 2022, 43, 1–7. [Google Scholar]
- Sun, X.; Wu, P.; Cai, Y.; Wang, S.; Chen, L. Piecewise affine modeling and hybrid optimal control of intelligent vehicle longitudinal dynamics for velocity regulation. Mech. Syst. Signal Process. 2022, 162, 108089. [Google Scholar] [CrossRef]
- Sun, X.; Hu, W.; Cai, Y.; Pak, K.; Chen, L. Identification of a piecewise affine model for the tire cornering characteristics based on experimental data. Nonlinear Dyn. 2020, 101, 857–874. [Google Scholar] [CrossRef]
- Xue, A.; Jiang, D.; Ju, S.; Chen, W.; Ma, H. Privacy-Preserving Hierarchical-k-means Clustering on Horizontally Partitioned Data. Int. J. Distrib. Sens. Netw. 2009, 1, 81. [Google Scholar] [CrossRef]
- Liu, H.; Hussain, F.; Shen, Y. Power quality disturbances classification using compressive sensing and maximum likelihood. IETE Tech. Rev. 2018, 4, 359–368. [Google Scholar] [CrossRef]
- Hua, F.; Pooi, Y. MAP/ML Estimation of the Frequency and Phase of a Single Sinusoid in Noise. IEEE Trans. Signal Process. 2007, 3, 834–845. [Google Scholar]
- Vaida, F.; Blanchard, S. Conditional Akaike information for mixed-effects models. Biometrika 2005, 2, 351–370. [Google Scholar] [CrossRef]
- Goto, M.; Matsushima, T.; Hirasawa, S. An analysis of the difference of code lengths between two-step codes based on MDL principle and bayes codes. IEEE Trans. Inf. Theory 1997, 3, 927–944. [Google Scholar] [CrossRef]
- Sun, X.; Cai, Y.; Wang, S.; Xu, X.; Chen, L. Piecewise Affine Identification of Tire Longitudinal Properties for Autonomous Driving Control Based on Data-Driven. IEEE Access 2018, 6, 47424–47432. [Google Scholar] [CrossRef]
- Sun, J.; Lu, X.; Mao, H.; Wu, X.; Gao, H. Quantitative Determination of Rice Moisture Based on Hyperspectral Imaging Technology and BCC-LS-SVR Algorithm. J. Food Process Eng. 2017, 3, e12446. [Google Scholar] [CrossRef]
- Han, F.; Huang, X.; Te, E.; Gu, H. Quantitative analysis of fish microbiological quality using electronic tongue coupled with nonlinear pattern recognition algorithms. J. Food Saf. 2015, 3, 336–344. [Google Scholar] [CrossRef]
- Owusu, E.; Zhan, Y.; Mao, Q. An SVM-AdaBoost facial expression recognition system. Appl. Intell. 2014, 3, 536–545. [Google Scholar] [CrossRef]
- Dutta, J.; Deb, K.; Tulshyan, R.; Arora, R. Approximate KKT points and a proximity measure for termination. J. Glob. Optim. 2013, 4, 1463–1499. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 6, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Xie, J.; Ge, J.; Lu, W.; Zong, B. Adaptive Strong Tracking Square-Root Cubature Kalman Filter for Maneuvering Aircraft Tracking. IEEE Access 2018, 6, 10052–10061. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, W.; Yu, L.; Yang, F. Sequential Gaussian Approximation Filter for Target Tracking with Nonsynchronous Measurements. IEEE Trans. Aerosp. Electron. Syst. 2019, 1, 407–418. [Google Scholar] [CrossRef]
- Li, S. Application of Event-Triggered Cubature Kalman Filter for Remote Nonlinear State Estimation in Wireless Sensor Network. IEEE Trans. Ind. Electron. 2021, 6, 5133–5145. [Google Scholar] [CrossRef]
- Zhou, C.; Xiao, J. Improved Strong Track Filter and Its Application to Vehicle State Estimation. Acta Autom. Sin. 2012, 38, 1520–1527. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Yu, T. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator. Appl. Math. Comput. 2015, 256, 352–367. [Google Scholar] [CrossRef]
- Gao, S.; Hu, G.; Zhong, Y. Windowing and random weighting-based adaptive unscented Kalmans filter. Int. J. Adapt. Control 2015, 29, 201–223. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting |
|---|---|
| Tire pressure (kPa) | 880 |
| Tire vertical load (N) | 8060 |
| Tire sideslip angle (°) | −10~10 |
| Tire longitudinal slip | −1~0.5 |
| Road adhesion coefficient | 0.34 |
| Tire camber angle (°) | 0 |
| Velocity of rolling plate (mm/s) | 200 |
| PWA Model | Affine Submodel Parameters | ||
|---|---|---|---|
| Tire longitudinal force | −177.8 | 14,936 | −1713 |
| 112.2 | −163 | −3266 | |
| −82.1 | −804 | 3283 | |
| 175.1 | 13,775 | 1784 | |
| −0.58 | −2513 | 3614 | |
| 30.3 | −1533 | −3332 | |
| −12.2 | 37,666 | 46.5 | |
| 120.8 | 170 | 3292 | |
| −191 | 9411 | 2267 | |
| −34 | −986 | −3088 | |
| −11.9 | −536 | −2686 | |
| −119.1 | −111 | −3346 | |
| −193.7 | 16,750 | −1590 | |
| 11.7 | −607 | −2746 | |
| Tire lateral force | −70.97 | −4239 | 1820 |
| −87.82 | 154.6 | 124 | |
| −14.83 | −3887 | −2338 | |
| −66.3 | −630 | −773 | |
| −86.8 | −2316 | −1285 | |
| −340 | −141.4 | 8.5 | |
| −56 | 586 | 476 | |
| −165.3 | 2686 | 981 | |
| −48.9 | 4741 | 2012 | |
| −81.9 | 3309 | −1680 | |
| Parameter | Setting |
|---|---|
| m (kg) | 2350 |
| R (m) | 0.25 |
| lf (m) | 1.337 |
| lr (m) | 1.587 |
| B (m) | 1.53 |
| Iz (kg·m2) | 4386 |
| hg (m) | 0.652 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, Y.; Hu, W. Estimation of Longitudinal Force, Sideslip Angle and Yaw Rate for Four-Wheel Independent Actuated Autonomous Vehicles Based on PWA Tire Model. Sensors 2022, 22, 3403. https://doi.org/10.3390/s22093403
Sun X, Wang Y, Hu W. Estimation of Longitudinal Force, Sideslip Angle and Yaw Rate for Four-Wheel Independent Actuated Autonomous Vehicles Based on PWA Tire Model. Sensors. 2022; 22(9):3403. https://doi.org/10.3390/s22093403
Chicago/Turabian StyleSun, Xiaoqiang, Yulin Wang, and Weiwei Hu. 2022. "Estimation of Longitudinal Force, Sideslip Angle and Yaw Rate for Four-Wheel Independent Actuated Autonomous Vehicles Based on PWA Tire Model" Sensors 22, no. 9: 3403. https://doi.org/10.3390/s22093403
APA StyleSun, X., Wang, Y., & Hu, W. (2022). Estimation of Longitudinal Force, Sideslip Angle and Yaw Rate for Four-Wheel Independent Actuated Autonomous Vehicles Based on PWA Tire Model. Sensors, 22(9), 3403. https://doi.org/10.3390/s22093403