1. Introduction
MEMS accelerometers are currently widely used in many electronic and mechatronic devices for a number of purposes primarily related to the sensing of linear acceleration, but also vibration [
1], mechanical shock (jounce) [
2], and one-axis tilt, i.e., inclination [
3], or two-axial tilt [
4]. Mathematical processing of the accelerometer output signal enables the sensing of linear velocity or displacement [
5], such as in the case of applying MEMS accelerometers for a wheel odometer designed to determine the kinematics of a car [
6]. While employing a higher number of accelerometers with a strictly defined geometrical configuration, accelerometers can replace gyroscopes in the sensing of angular rates [
7].
Despite numerous advantages of these microsensors, including low price, robustness, small size, high shock-resistance and easy integration with electronics, there are a few disadvantages that characterize their performance. These are mainly: misalignments of the sensitivity axes (including their non-perpendicularity) [
8]; thermal and long-term drifts of the output signals (affecting both the offset and the scale factor) [
9]; errors related to factory calibration of the accelerometer and aging of the silicon structure [
8]; and attenuation of amplitude and phase shift over frequency [
10].
Misalignments of the accelerometer sensitivity axes are very harmful [
11,
12], especially in the case of performing accurate tilt measurements [
13], which are one of the most typical applications of MEMS accelerometers [
14]. Therefore, many solutions have been proposed to address this problem, mainly based on numerical compensation for the existing misalignment angles, as proposed, e.g., in [
15,
16,
17].
Thermal drifts of the offset and the scale factor, of which the first is much more dominant [
9], are dealt with by the application of temperature sensors and using averaged thermal characteristics (or look-up tables) of particular accelerometer models. Another approach is keeping the accelerometer at a constant ambient temperature [
9], e.g., by means of the application of micro-ovens [
18], either custom or standard—as in the case of precise quartz-crystal resonators [
19].
Long-term drifts and effects of aging of the silicon structure are more difficult to be compensated for. Some manufacturers declare maximal changes due to aging over the whole lifetime of a MEMS device [
20], and other manufacturers implement models for the prediction of these changes [
8]; overall though, the long-term drifts are rather difficult to predict. It seems that repetition of the calibration process is the only reasonable solution which enables a significant reduction of the related errors.
Moreover, recalibration of the sensor may compensate for errors resulting from such factors as geographic latitude, altitude, and local and temporal changes of gravitational acceleration due to many other reasons (e.g., constellation of the heavenly bodies, especially the sun and moon).
One of the ways to eliminate or compensate for such errors as unknown orientation of the accelerometer sensitivity axes, thermal and long-term drifts of the output signals, calibration errors of the accelerometer, and aging of the silicon structure is sensor recalibration with the use of a test stand [
21,
22,
23], or by performing auto-calibration [
24,
25], allowing the sensor operating parameters to be accurately determined under given operating conditions. Using a test stand is of course expensive and laborious, whereas auto-calibration is usually complicated, consumes a lot of computing power, and may require a sophisticated analysis of the existing errors, e.g., in [
26].
It was decided to evaluate how effective, in terms of the elimination of some of the relevant errors, a recalibration of MEMS accelerometers may be, assuming that no dedicated test stand would be used. It was proposed to reduce the test stand to a flat leveled surface and build a special tilt sensor based on a triaxial MEMS accelerometer, since this enables performance of dual-axis tilt measurements within full measurement range, i.e., 2 × 360° [
27]. The tilt sensor is equipped with a custom housing that makes it possible to repeat a simple and quick calibration procedure of the accelerometer, and comprises an aligning unit for the reduction of the misalignments of the accelerometer sensitive axes.
The experimental results proved that the proposed tilt sensor, characterized by relatively low cost, features accuracy much higher than the results from the parameters of the applied MEMS accelerometer. Misalignment of the sensitive axes did not exceed 0.03° and, owing to recalibration, thermal and long-term drifts of the output signals were eliminated. At the same time, the following errors were fully eliminated: imprecise factory-calibration of the offset and the scale factor for each sensitivity axis of the accelerometer, as well as aging effects of the sensor-chip.
2. Mechanical Structure of the Device
As aforementioned, the essential shortcomings of MEMS accelerometers can be eliminated by repeating their calibration process. When implementing a simple calibration procedure, which does not require the application of a dedicated test stand, it is beneficial to use suitable accelerometer housing (which typically has an unfavorable geometry), preferably of a cubic shape. Such an idea has been presented in [
28], where it was proposed to equip the tested inertial measurement unit (IMU) with a rectangular housing adapted to calibrate the component triaxial MEMS accelerometer and MEMS gyroscope. On the other hand, in [
13] a special mechanical unit used for alignment of the used MEMS accelerometer is described. In this paper, a sensor using both solutions is presented, where the aligning unit, used to adjust orientation of the MEMS accelerometer, is mounted in a housing that allows its calibration to be performed without a test stand.
2.1. The Housing
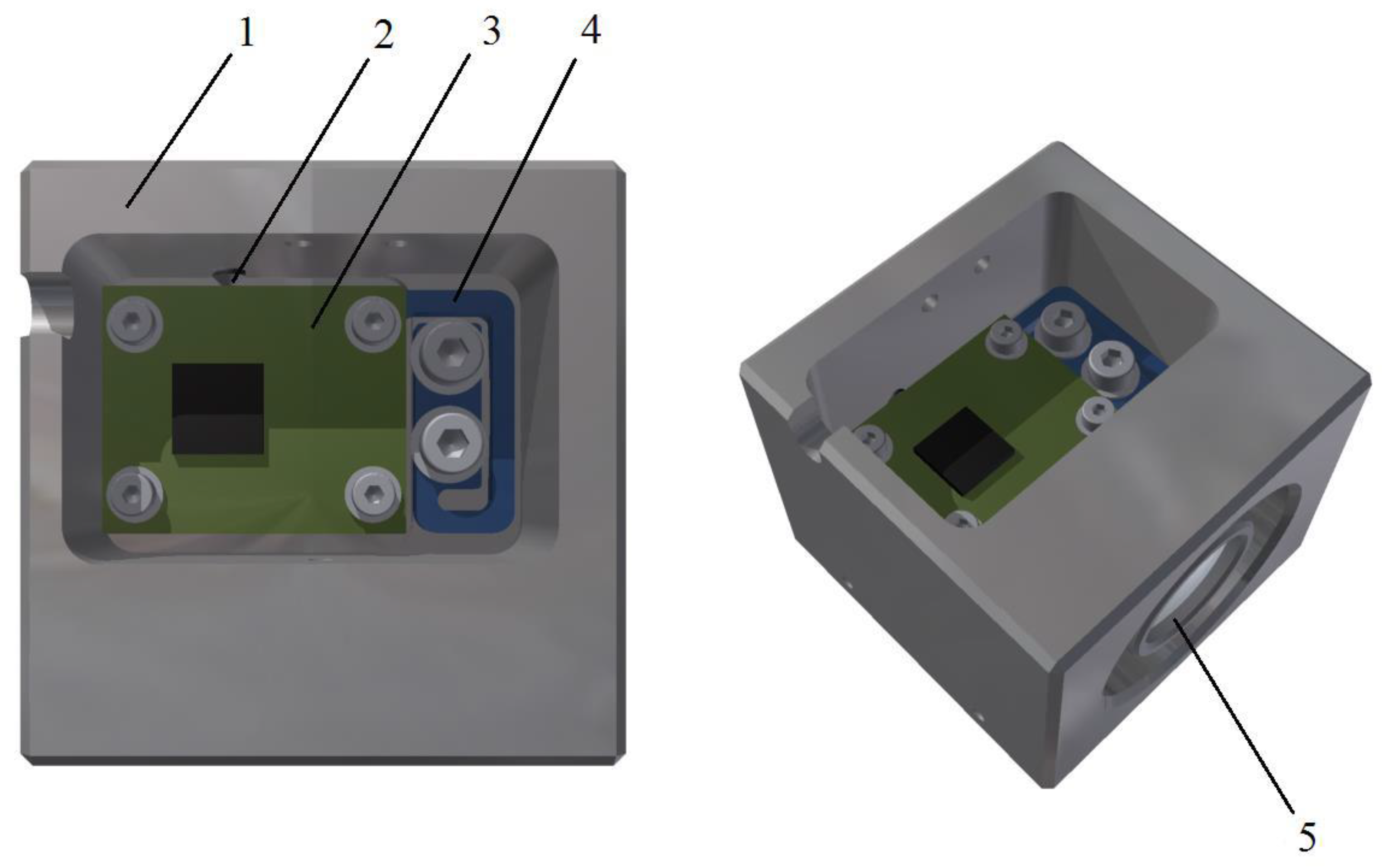
In order to replace the role of the test stand during the calibration of the sensor, the housing must have a specific geometrical shape. Maintaining, at the same time, a good alignment of the accelerometer sensitive axes with respect to the external mechanical frame (housing) significantly reduces the influence of the related errors. The presented mechanical structure was designed to ensure possibly simple realization of these two ideas. Therefore, the housing of the sensor has a cubic shape, as presented in
Figure 1, with a chamber open in one of the faces, in which the chamber an aligning unit is installed. The aligning unit supports a printed circuit board, onto which a MEMS accelerometer is soldered.
The housing is made of stainless steel, which ensures sufficient and durable perpendicularity of its faces, with the respective deviation of ca. 0.01 degrees arc, which results from precession of its machining. It is possible to obtain lower deviation of perpendicularity; however, this is at considerably higher machining costs, especially in the case of stainless steel. Nevertheless, if the housing is expected to be used for determining the inherent misalignments of the accelerometer sensitive axes (e.g., when the axes are not perpendicular, as discussed later in the text), deviation of perpendicularity of its faces must not exceed the expected alignment error.
The housing has three openings created in its faces. The first opening provides a space for the aligning unit and the accelerometer PCB. The structure of the housing facilitates placement of the unit.
The second opening of a cylindrical shape in the housing is created for a spirit level, which makes it easier to level the flat surface used during calibration of the sensor, proving a leveling precision of ca. 1 min arc.
The third opening is a small notch, which enables the cable to be put on different faces, depending on the housing orientation during calibration of the sensor. The cable transmits measurement data from the MEMS accelerometer and supplies it with power. Alternatively, the sensor may be equipped with a wireless communication module connected with the accelerometer and adapted to transmit its readings to an external computing unit, just as proposed in [
28] and presented in
Section 7.
Additionally, several groups of threaded holes are provided in the housing. The first allows the sensor to be mounted in the end-user device or to be fixed in a special test stand while aligning the accelerometer sensitive axes. The second makes it possible to secure all the sensor components in the housing (the aligning unit, the spirit level, a grip of the cable), whereas the third is for the aligning screws.
The constructed tilt sensor is based on using a triaxial MEMS accelerometer; therefore, it can be used for two-axial tilt sensing. Of course, it is also possible to sense single-axis tilt (i.e., inclination: either pitch or roll) or axial tilt. Then, the triaxial MEMS accelerometer may be replaced by a biaxial or uniaxial one, as discussed in [
27].
In order to determine perpendicularity deviation of the adjacent faces of the machined housing, a precise coordinate measuring machine (CMM) was employed. The maximal deviation of perpendicularity DP among all the adjacent faces of the housing was 36 s arc (0.01°), whereas deviation of flatness did not exceed 5 μm.
However, it should be noted that for alignment purposes, it is sufficient to make the geometrical data of only two adjacent faces of the housing. The faces should be flat and approximately perpendicular: the first is the base that removes two rotational degrees of freedom of the sensor, and the second removes the third rotational degree of freedom.
Nonetheless, if all the faces of the housing are machined precisely, any pair of adjacent faces can be used as the geometrical data, making the installation of the housing in the end-user device more convenient.
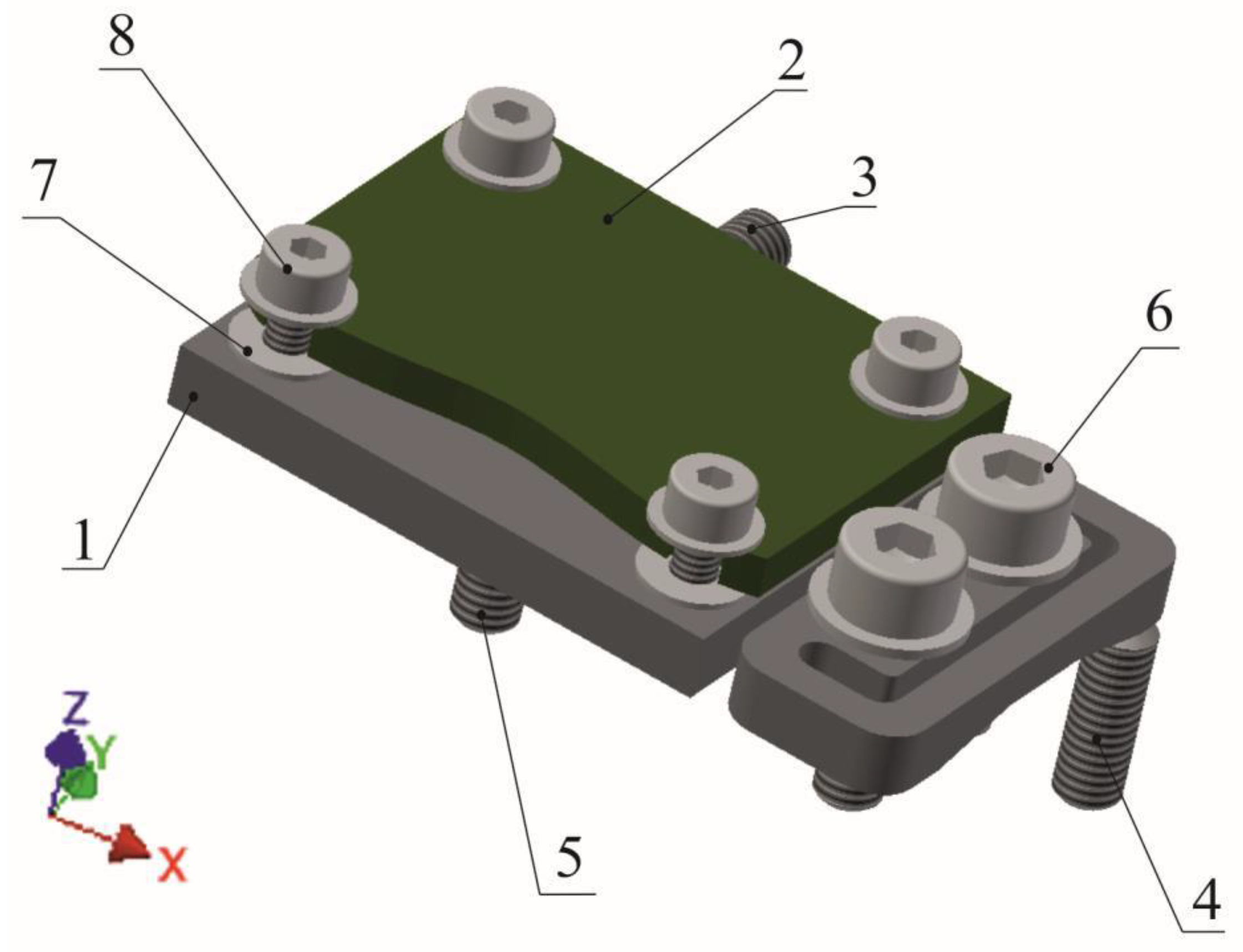
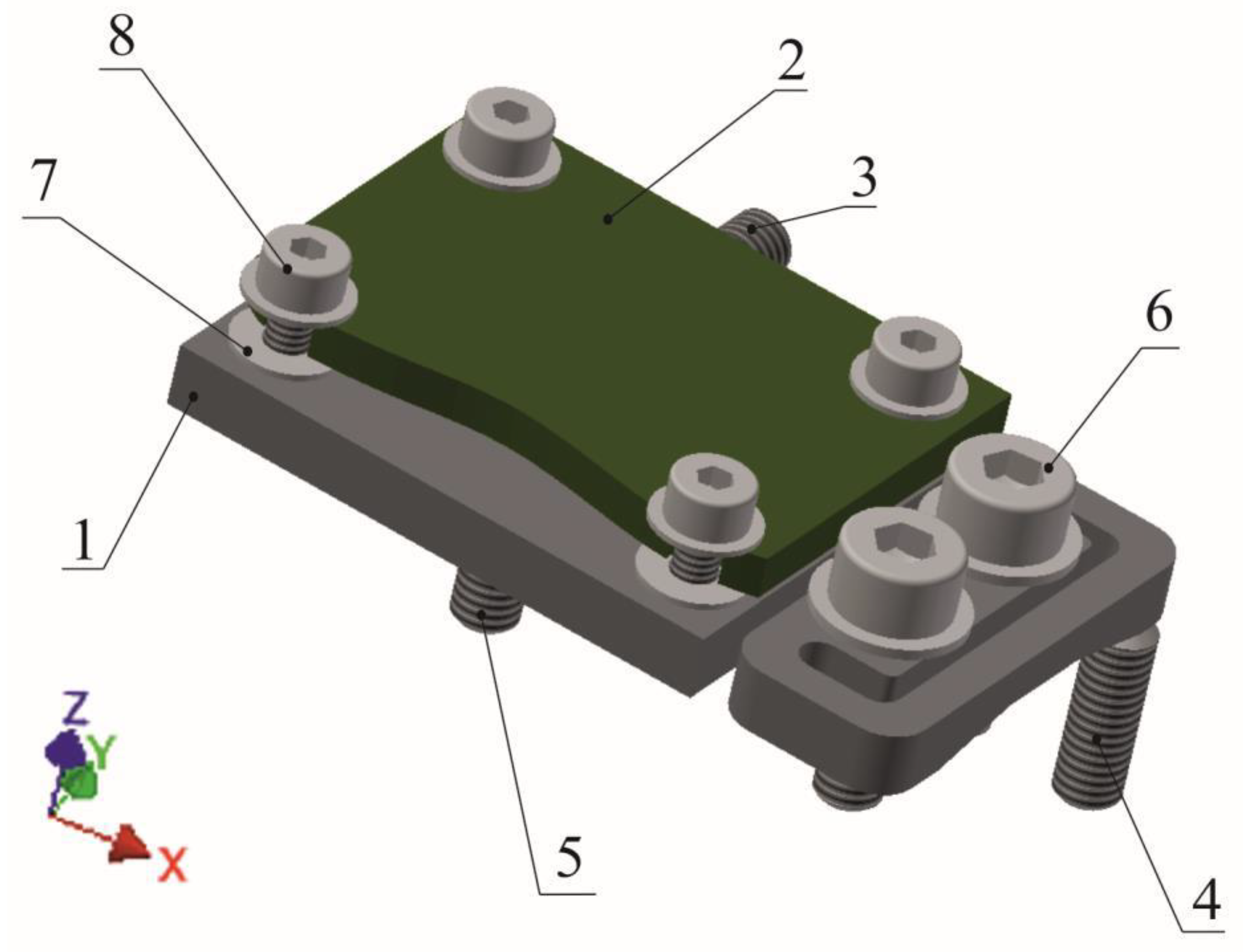
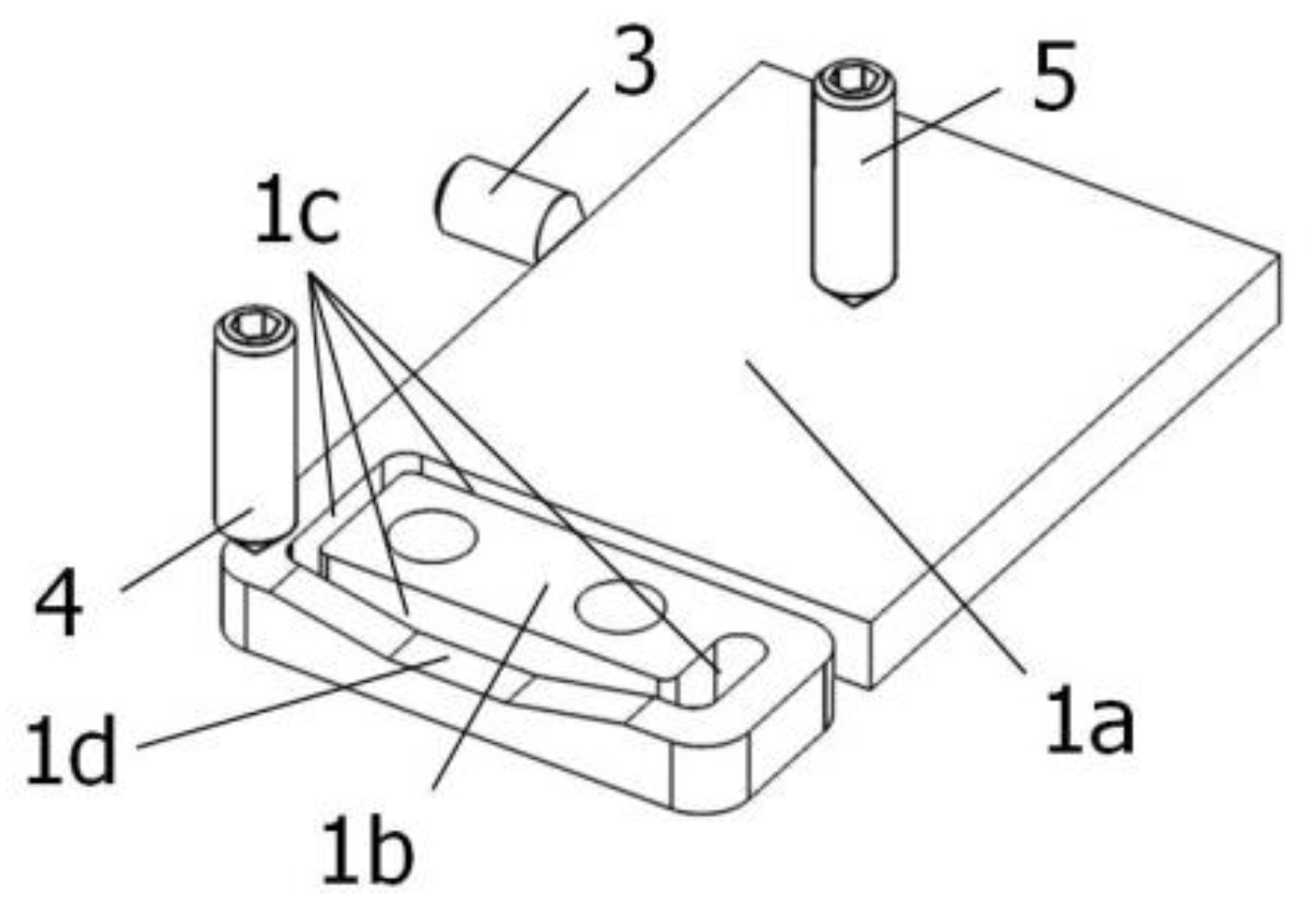
2.2. The Aligning Unit
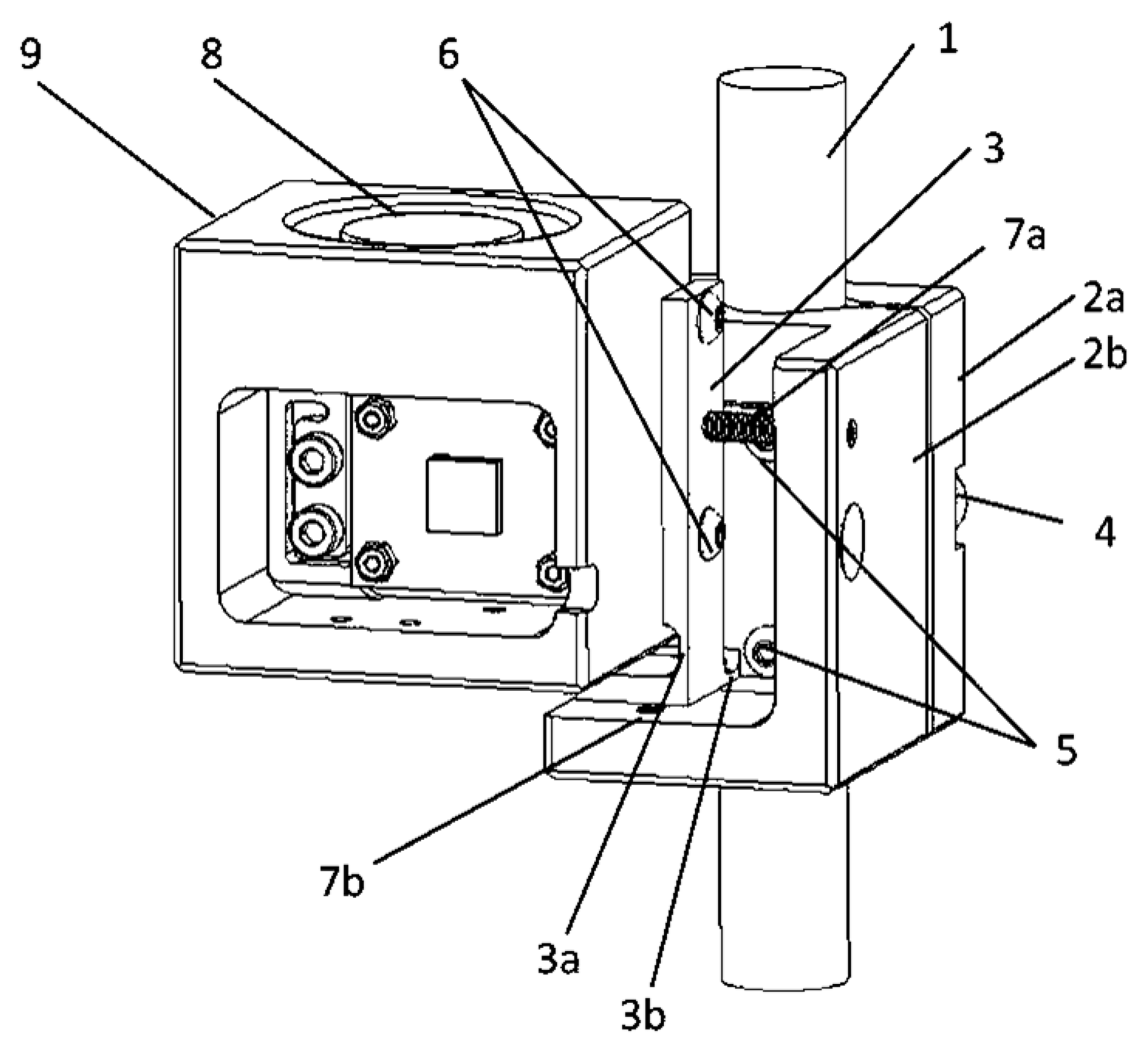
The aligning unit, presented in
Figure 2 in top view, is fixed to the housing by two clamping screws, and its orientation with respect to the housing is determined by three aligning screws oriented approximately perpendicularly to each other. Between the mounting section of the aligning unit and its supporting section, a U-shaped groove is created partially surrounding the mounting section. The PCB with MEMS accelerometer is fixed to the supporting section by means of four clamping screws. Owing to the groove, it is possible to elastically deform the aligning unit in such a manner that the supporting section can reversibly move with respect to the mounting section. The angular displacements can be controlled by means of three aligning screws seated in the walls of the housing. Thus, it is possible to align the accelerometer by changing the orientation of the supporting section of the unit with respect to the housing.
The three aligning screws are seated in threaded holes created in respective walls of the housing. The aligning screw 5 rests against the supporting section which, owing to the U-shaped groove, may be deflected with respect to the mounting section. Screwing in this screw results in rotation of the supporting section about y-axis. The aligning screw 4 is parallel to the aligning screw 5. It is located within the same plane of the unit, but is closer to the mounting section. Screwing in this screw results in rotation of the supporting section about x-axis. The third aligning screw 3 is oriented perpendicularly to the other two. Screwing in this screw results in rotation of the supporting section about z-axis. Thus, the presented configuration provides adjustment of accelerometer orientation around three perpendicular axes.
The aligning unit is made of aluminum alloy featuring good elasticity and high fatigue strength. Nevertheless, the unit may be made of some other material, preferably (due to good elastic properties): beryllium bronze, brass, steel, polymer (including 3D printing), composites (glass or carbon fiber).
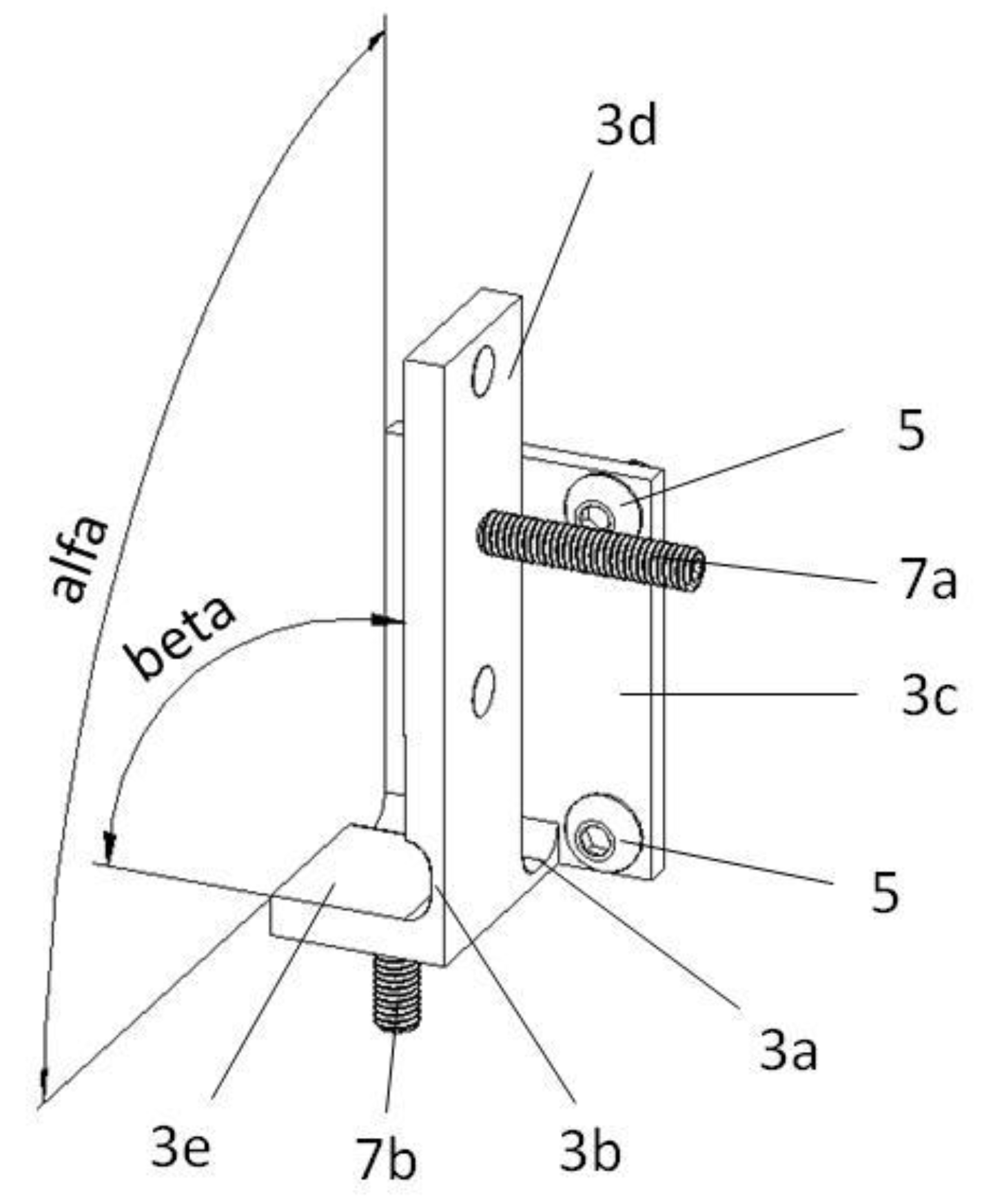
In order to reveal a special relief created next to the groove, the aligning unit is shown in bottom view in
Figure 3.
The relief was introduced in order to reduce the mechanical stress in the structure of the aligning unit. As can be seen in
Figure 4, the maximal value of the Von Mises stress, while fully loaded by means of all three aligning screws, does not exceed 155 MPa, which is a relatively high, yet acceptable with respect to aluminum alloy.
It must be realized that it is almost impossible to build such an aligning mechanism that would ensure no interaction between alignments in particular axes—especially when keeping its overall dimensions small. Therefore, the alignment procedure, being of experimental nature, must be iterative, i.e., additional fine alignment in one axis must follow a rough alignment in the other axes. Typically, 2 or 3 iterations ensure a satisfactory result.
3. Physical Alignment of the MEMS Accelerometer
Physical alignment enables a precise positioning of the accelerometer with respect to the sensor housing, i.e., the particular accelerometer sensitivity axis is oriented in such a way that it is either parallel or perpendicular to the housing external faces.
While aligning the accelerometer, a simple procedure, minutely described in [
13], can be used. It basically consists of slowly rotating the sensor about a rotation axis parallel to the respective housing face (which is also approximately parallel to the sensitive axis being aligned), and monitoring the output signal associated with the sensitive axis being aligned. Variations of the output signal should be minimized by changing the orientation of the sensitive axis by means of two appropriate aligning screws.
First, the tilt sensor must be precisely fixed in a test stand, ensuring parallel orientation of the respective housing face with respect to the rotation axis of the test stand. Then, the aligning procedure should be performed for the
X-axis (see
Figure 2), setting aligning screws
3 and
5 to obtain minimal variations of the
x-output signal. Then, the aligning procedure should be performed for the
Y-axis. However, at this time only the aligning screw
4 can be used in order to obtain minimal variations of the
y-output signal. Alignment precision of the
Z-axis results from the two procedures. The order of aligning of the sensitive axes can be of course changed, according to particular demands related, e.g., to the accuracy of tilt measurements.
It must be realized that a complete elimination of all misalignments is generally impossible due to the fact that accelerometer sensitive axes are not perfectly perpendicular. The inherent mutual misalignments may be much higher than specified in the relevant datasheets, even of 1° [
27]. This problem is discussed in
Section 6.
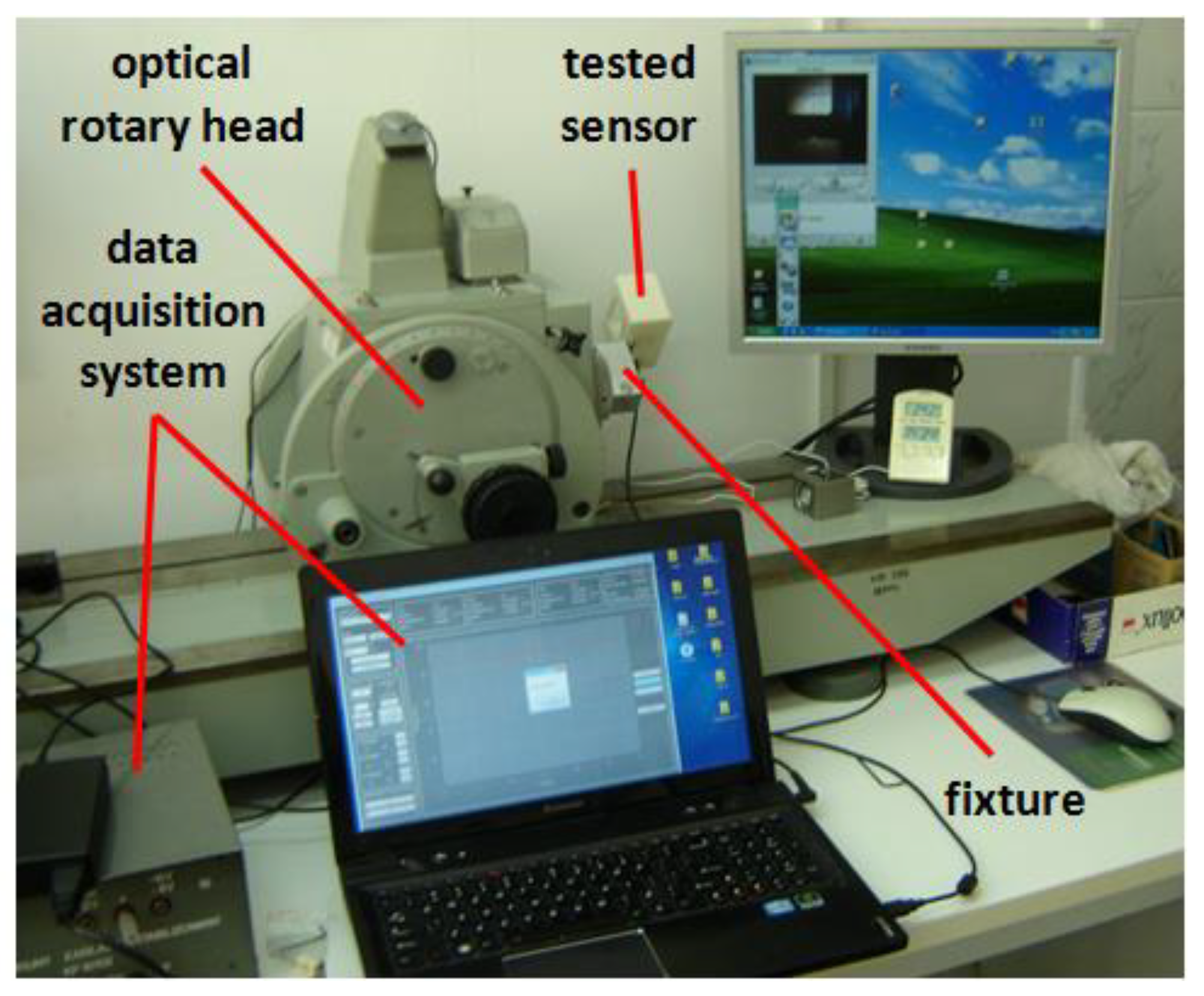
The Alignment Precision
In order to precisely align the accelerometer with respect to the housing, the test rig presented in
Figure 5 was employed. The housing of the aligned sensor was secured in a special precise fixture installed on the output shaft of the optical rotary head. The shaft was driven manually with the positioning accuracy of a 3 s arc. The accelerometer was supplied by a stabilized power unit and constant-voltage regulator (nominal voltage: 3 V; range of variation of the voltage throughout the whole experiment did not exceed 0.25 mV), and its output analog voltage signal was sampled by means of a data acquisition module USB 6211 by National Instruments (not shown in
Figure 5) and recorded in computer memory.
According to the method described in [
13], a series of 30 measurements were performed at the following angular positions, the resultant average value was observed, and the aligning unit was adjusted accordingly. After few revolutions, it was possible to align the particular sensitive axis so precisely that the observed variation of the averaged output voltage did not exceed ±
LSB [
13], where
LSB is the least significant bit (in the case of the 16-bit USB 6211 device and the measurement range of 10 V:
LSB = 0.15 mV). Thus, the error of the alignment procedure
APE can be calculated as follows:
where
SF is the scale factor of the accelerometer (see
Section 5.1).
On the other hand, the total alignment error (
TAE) can be evaluated as follows:
where
DP is the deviation of perpendicularity (see
Section 2.1).
4. Calibration of the Sensor
As aforementioned, owing to the cubic shape of the housing, a test stand was not necessary to perform the calibration. The only element required was a platform that could be precisely leveled, e.g., using the embedded spirit level.
Various concepts of the low-g accelerometer calibration process have been proposed in relevant publications, e.g., using twelve characteristic orientations of the accelerometer, employing a simple instrument such as a three-way milling vice [
21]. However, in most of the related research, only six characteristic orientations were employed, e.g., in [
9,
23,
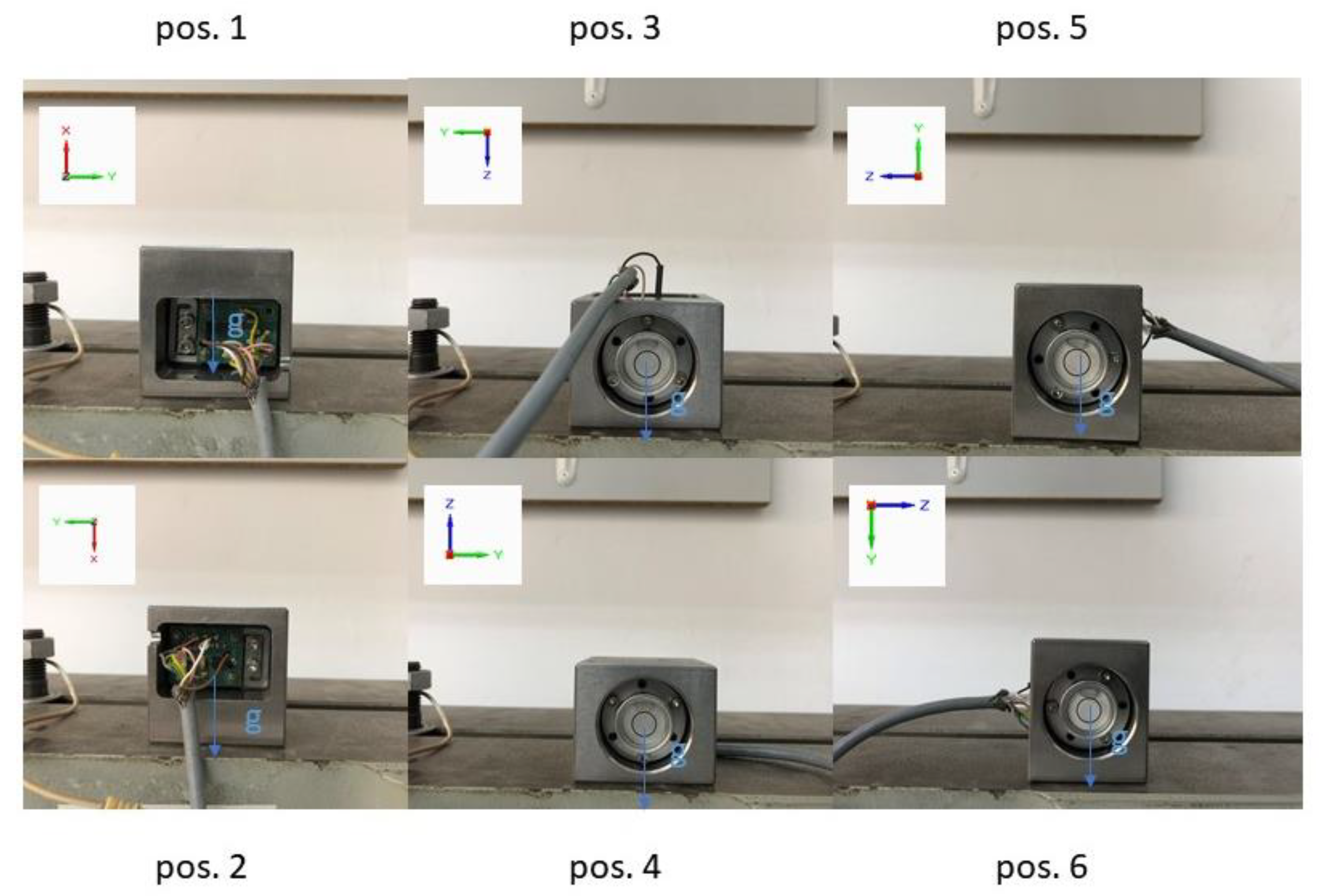
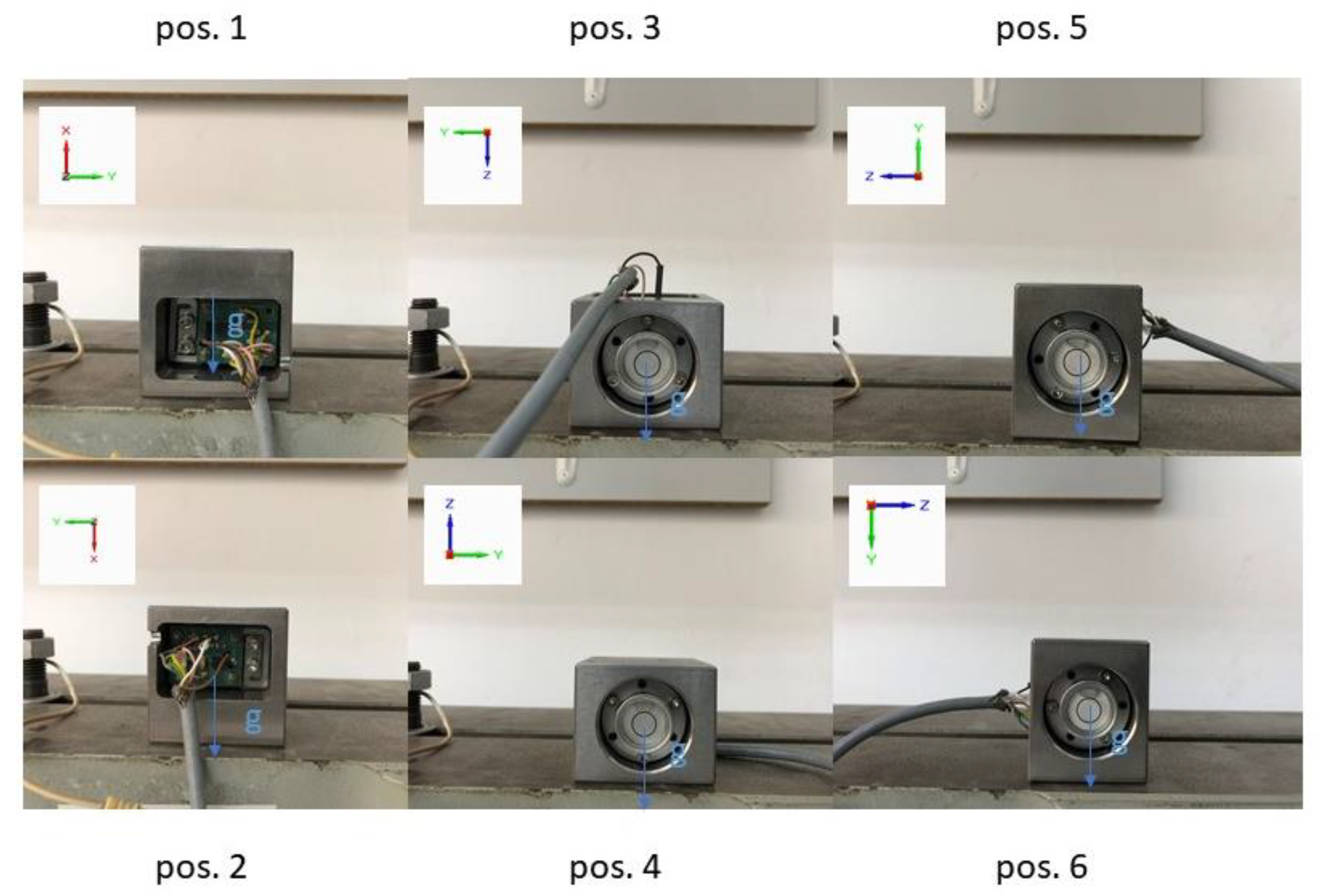
28]. The accepted idea of the calibration was also based on the latter concept, and was very simple. It was based on recording the sensor output signals under static conditions at six specific orientations, where one of the accelerometer output signals reached its extreme (maximal or minimal) value. The six positions were, of course, defined by the faces of the housing and are presented in
Figure 6.
In order to perform the proposed type of calibration, the accelerometer output signals were measured after it was placed on each of the six external faces of the housing. At each position, a series of measurements of the output signal associated with a particular axis was performed. Then, an average value was determined for each axis at each position.
In the case of the reported study, 300 measurements of the analog voltages were performed per each axis, at each of the six calibration positions. For this purpose, the data acquisition module USB 6211 by National Instruments was used, whose absolute accuracy at the selected scale range (10 V) was specified as 2.7 mV [
29] (it should be noted that the relevant accuracy was higher, since the performed measurements reached only 20% of the measurement scale and no variation of the ambient temperature was involved). For all of the 18-measurement series, the type-A uncertainty [
30] did not exceed 0.24 mV. Assuming Gaussian distribution, the expanded uncertainty (3-
σ error), corresponding to a probability of 99.73%, was equal to 0.72 mV.
At this point, it is worthwhile to mention that at the orientations illustrated in
Figure 6, the calibrated accelerometer axis is not sensitive to relatively large inclinations of the housing. Let us assume that the reference surface is precisely leveled (accuracy of 1 min arc), and the housing is characterized by a large theoretical deviation of perpendicularity
TDP as high as 1 degree arc. As a result, the calibrated axis, instead of the gravitational acceleration
g, senses its component that is equal to
gcos(
TDP), which is only 0.02% smaller than
g. The resultant calibration error (
CE) expressed as tilt angle can be evaluated as follows:
where
TDP is a theoretical deviation of perpendicularity, accepted as 1°.
So, from the point of view of the calibration, deviation of perpendicularity of the housing being as large as 1 degree arc results in a tilt error below a 0.01 degree arc. So, if only two faces of the housing are to be used for aligning the sensor with respect to the frame of the end-user device, as suggested in
Section 2.1, deviation of perpendicularity of all the faces of the housing may be even that large.
The purpose of the calibration process is to determine two individual parameters for each sensitive axis: offset (bias)
OF and scale factor
SF. Having all the data recorded, maximal and minimal average value for each sensitive axis must be found. Then, the following equations can be used to compute the set of the offsets and scale factors:
where
Ux..z are averaged voltage output signals assigned to particular sensitive axis of the MEMS accelerometer, expressed in [V];
OFx..z are offsets (biases) associated with particular sensitive axis, expressed in [V]; and
SFx..z are scale factors associated with particular sensitive axis, expressed in [V/
g], where
g is the gravitational acceleration.
Once the calibration parameters have been determined, accelerations indicated by the accelerometer can be expressed as a fraction of
g (referring to tilt measurements), using the following formulas:
In order to calculate tilt (expressed as pitch, roll or axial tilt), various formulas based on inverse trigonometric functions can be used, as discussed in [
27].
It should be noted that owing to the recalibration of an accelerometer at the location of its operation, the errors due to variations of the gravitational acceleration (resulting mainly from the local altitude and latitude) can be eliminated. If the recalibration is cyclically repeated, even temporal variations of the gravitational acceleration (e.g., resulting from interactions of the heavenly bodies) can be considerably reduced.
4.1. Misalignment Angles
If it is impossible to precisely align the accelerometer (e.g., due to its inherent imperfections), the component misalignment angles can be determined (two for each axis) during the calibration. In such case, not only the extreme values of the output signals of the accelerometer must be used, but all the average values. At a position of the sensor when a particular sensitive axis has approximately horizontal orientation, the associated output signal makes it possible to determine the respective misalignment angle, which the accelerometer senses as pitch or roll.
Referring to
Figure 2 and
Figure 6, the respective positions will be the following for the particular sensitive axes:
pos. 1 and pos. 2 and pos. 3 and pos. 4 for x-axis;
pos. 3 and pos. 4 and pos. 5 and pos. 6 for y-axis;
pos. 1 and pos. 2 and pos. 5 and pos. 6 for z-axis.
Using the scales factors and offsets determined in the first step, it is possible to determine the misalignment angles
MA using the following formulas:
where
U1..
6x..
z are averaged voltage signals assigned to a particular sensitive axis (
x..
z) at a given position (1..6 as in
Figure 6), expressed in Volts.
7. 3D-Printed Housing
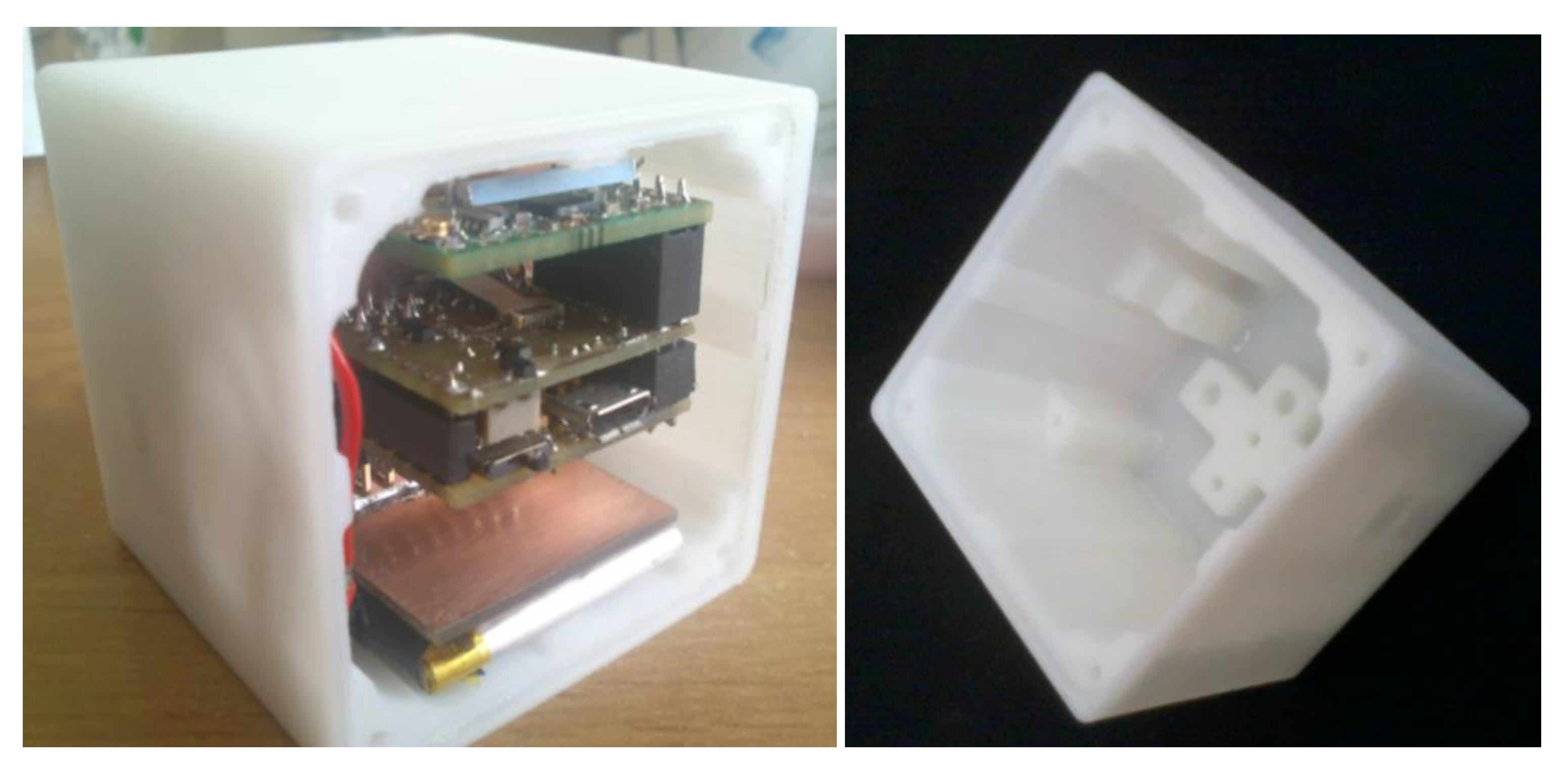
Because of a high cost of machining for the housing made of stainless steel, it was decided to use additive manufacturing instead. Two prototypes were made of acrylonitrile butadiene styrene (ABS), using fused material deposition (FDM) technology. One of the manufactured prototypes of the tilt sensor is presented in
Figure 8. Moreover, it was decided to add a module of wireless transmission and a battery in order to eliminate the cable.
The prototype had dimensions of 40 × 48 × 48 mm [
33], the same as in the case of the steel housing. However, it was not equipped with a spirit level, and employed a different design of the aligning unit: instead of a compliant structure, a commercial cap-and-ball joint was used. Nevertheless, the alignment principle remained the same—it was realized by means of 3 screws and small helical springs as their counterparts.
Because of a considerable shape deviation of the printed housing, its footing had to be machined in order to make it flat, which is important while calibrating the tilt sensor. While using additive manufacturing, attention must be paid to the selection of an appropriate material featuring possibly high mechanical strength in the first place. Then, an appropriate 3D printing technique must be used. As proven by experimental tests of 3D prints, mechanical properties of various materials differ considerably [
34,
35].
In the case of the second prototype, an attempt was made to manufacture the ball of the joint as integrated with the housing [
36]. However, due to porous structure of the 3D prints, it broke easily. Moreover, the ball and its counterparts were characterized by higher friction compared to the commercial cap-and-ball joint. So, because of material properties, it is recommended to use additive manufacturing only for the housing, and to machine the aligning unit in a conventional way. Nonetheless, another trade-off must be realized: substituting stainless steel with a printed polymer results also in a significant worsening of the robustness of the housing. This may not be acceptable when the tilt sensor is operated under harsh industrial conditions. Still, another problem is the limited temperature range, both for the operation of as well as the storing of 3D prints. Our own tests proved that even the temperature inside a car on a hot summer day (ca. 60 °C) causes a permanent distortion of 3D prints if exposed for a long time. These prints are also hygroscopic, and it is difficult to define the long-term stability of their shape and dimensions.
Nevertheless, when the tilt sensor is to be used only under laboratory conditions (research, didactic classes), printed housing may be considered as a much cheaper option compared to steel housing. Additional machining of the footing ensures satisfactory flatness, whereas linear accuracy of FDM of ca. 0.1 mm is high enough with respect to the required deviation of perpendicularity of the housing faces, which under special conditions may be as high as 1° (see explanation in
Section 2.1). As in the case of the steel housing, perpendicularity deviation of the adjacent faces of the two ABS housings was determined by the coordinate measuring machine. The maximal deviation of perpendicularity among all the adjacent faces of the housing was approximately of few min arc (0.1°).
9. Summary
An original tilt sensor has been presented. Its parameters are:
Measurement range: 360-degree arc about two axes (pitch and roll angle measurement over the full range);
Misalignments of the sensitive axes with respect to the housing of approx. 0.03 degree arc;
Output signals in the form of analog voltages of approx. 1–3 V or digital (depending on the applied MEMS accelerometer or its operation mode);
Dimensions of the PCB with MEMS accelerometer: 22 × 27 × 3 mm;
Housing dimensions: 40 × 48 × 48 mm (volume: 93 cubic cm);
Housing material: stainless steel (ensuring robustness) or 3D-printed polymer (ensuring low cost);
Mechanical datum of the housing for accurate mounting of the sensor onto the end-user device, using several threaded holes created in the housing;
External faces of the housing allowing accurate calibration and alignment of the sensor to be performed on a leveled surface;
Error of leveling the housing (by means of the embedded spirit level) of approx. 1 min arc.
The presented tilt sensor, owing to the special design of its housing, can be easily and quickly recalibrated by the user in order to eliminate such considerable errors as thermal and long-term drifts as well as effects of aging, keeping the sensitive axes aligned with respect to the external mechanical datum (two faces of the housing).
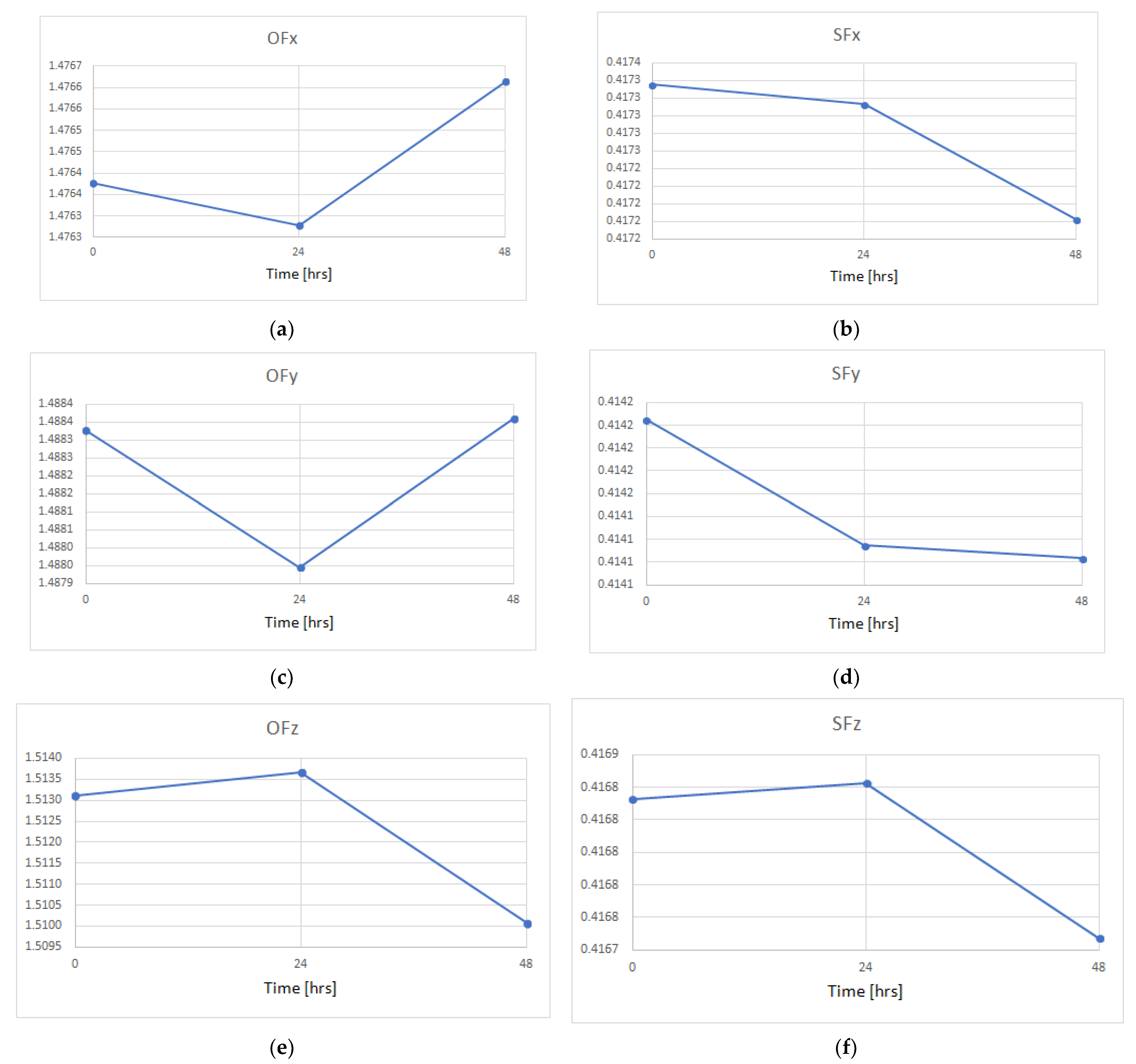
As it has been experimentally discovered, thermal drifts due to self-heating of the accelerometer typically resulted in relatively insignificant variations of the offset or the scale factor of approx. 0.02%. However, long-term drifts resulted in variations of these parameters as high as 0.2% (3 mV) within only 48 h., corresponding to the acceleration error of ca. 0.7% and tilt error of ca. 0.4°.
In order to compare the performance of the proposed sensor, misalignment values of four inertial measurement units (IMU) with 6–10 degrees of freedom (DOF) and a MEMS accelerometer by Analog Devices Inc. are listed in
Table 9. It should be noted that it is difficult to find MEMS sensors with misalignments of the sensitive axes with respect to the frame (packaging) specified separately in the respective datasheet—this is why sensors by Analog Devices Inc. were selected.
Moreover, the manufacturer stated that they strove for a tight orthogonal alignment of the sensitive axes, since it simplifies the alignment of the sensor packaging in navigation systems [
37,
38]. The listed mutual misalignment of the sensitive axes is an inherent feature of a given sensor, and cannot be physically reduced.
While comparing the values of misalignments of the sensitive axes with respect to the packaging (minimal value of ±0.5°), it can be stated that the corresponding value featured by the proposed sensor (approximately ±0.03°) was considerably lower (16 times).
The IMUs listed in
Table 9 had their thermal drifts compensated for. However, even though some of them were quite expensive (price over USD 1000), the long-term drifts and effects of aging phenomena were not reduced, whereas the proposed sensor makes it possible to fully eliminate these effects owing to the recalibration process.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}