
An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments

 ,
, 
Abstract
:1. Introduction
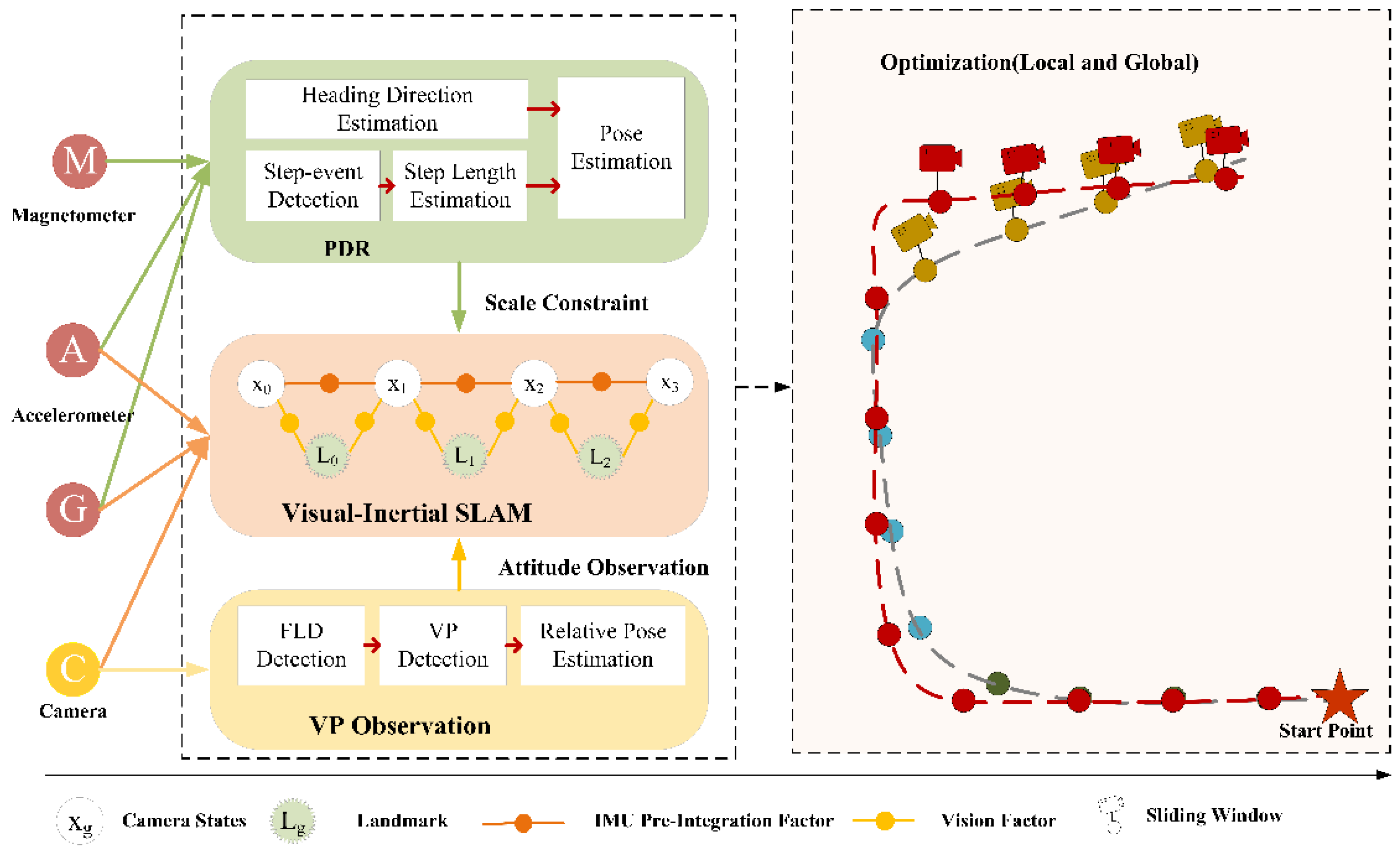
- Introducing an external observation without drift error into the visual-inertial SLAM, which is detected in the selected keyframe;
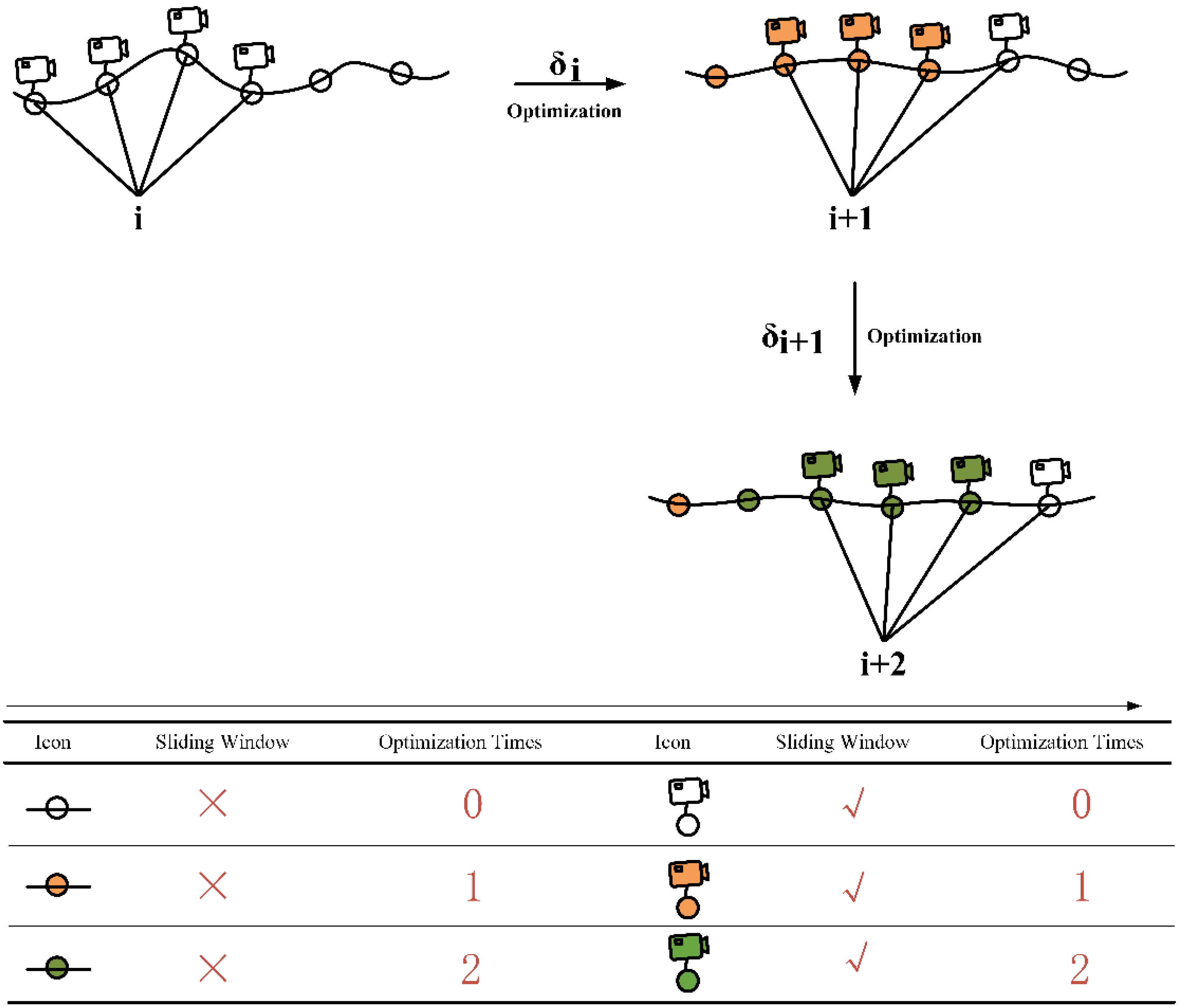
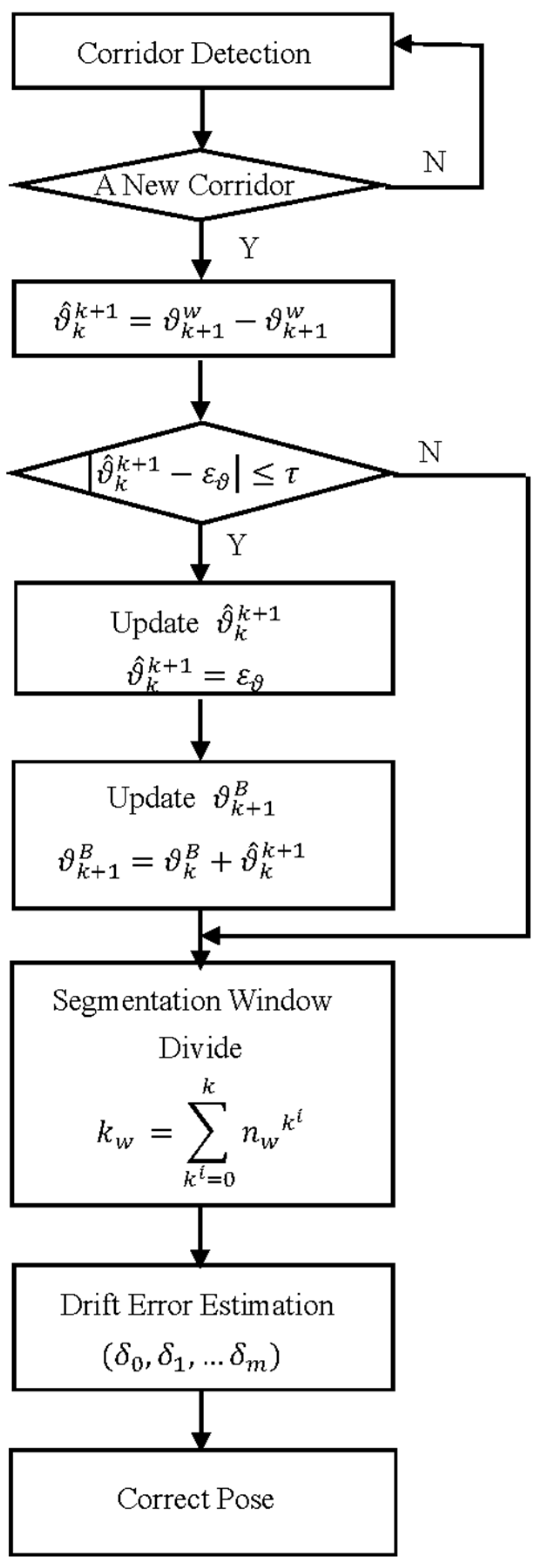
- Proposing the local optimization method based on the sliding window and the global optimization method based on the segmentation window to correct the system’s attitude estimation;
- External observation VP and PDR are obtained using the visual-inertial SLAM’s monocular camera and IMU, which wouldn’t increase the system’s hardware cost.
2. Related Works
2.1. Visual-Inertial SLAM
2.2. Vanishing Point
3. The Main Context
3.1. System Overview
3.2. Scale Drift Correction Based on PDR
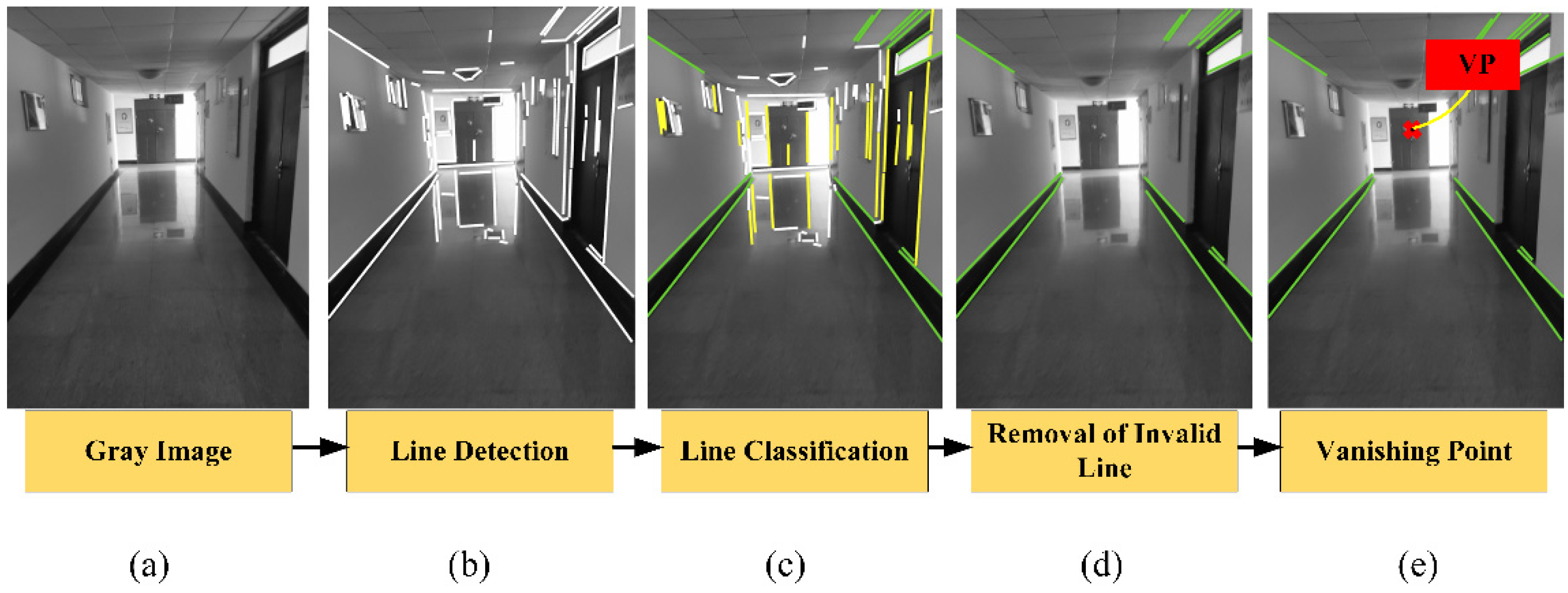
3.3. The Camera Pose Estimator Based on VP
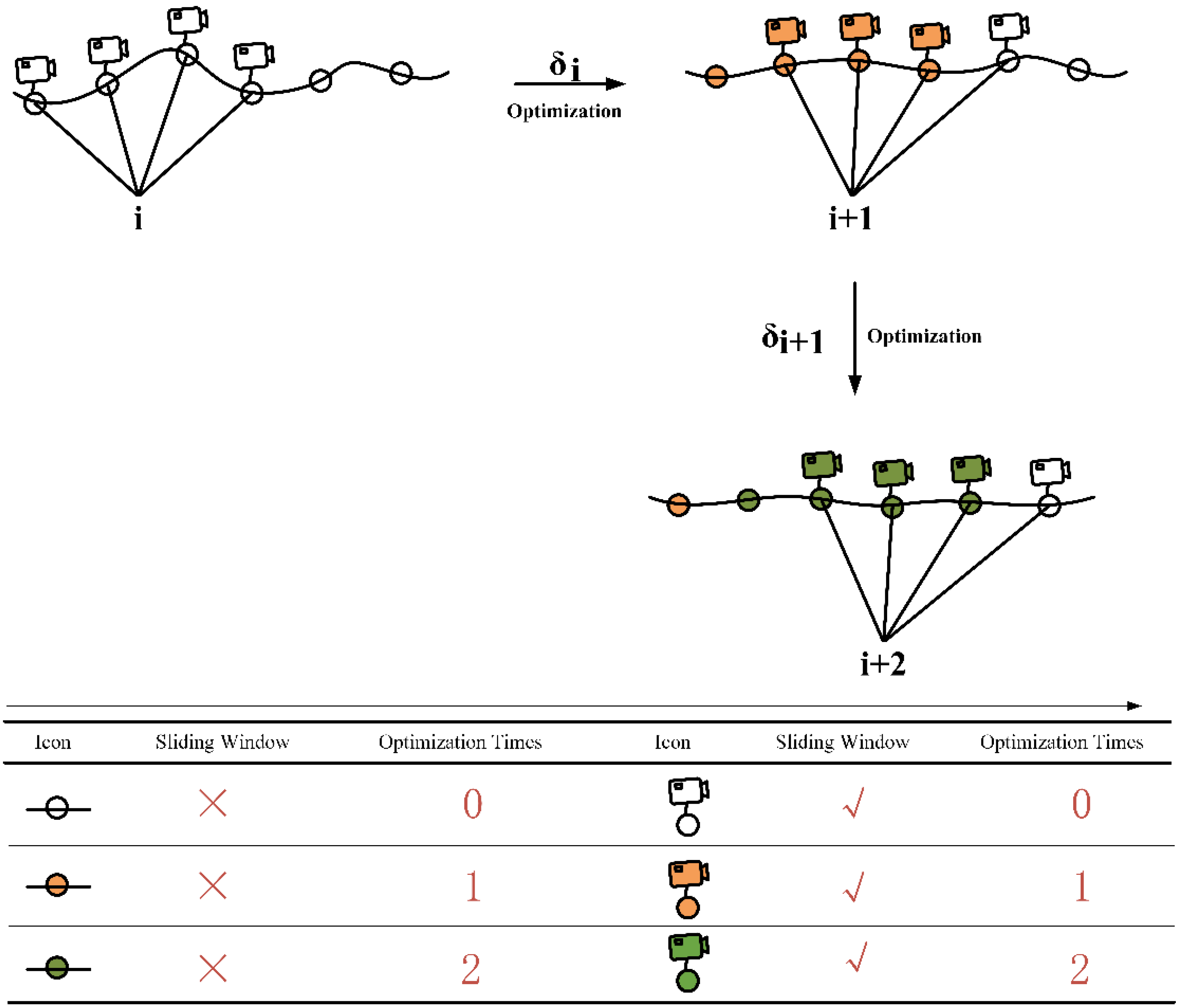
3.4. The Local Optimization Method Based on the Sliding Window
3.5. The Global Optimization Method Based on the Segmentation Window
4. Experiment and Result
4.1. Dataset
- (1)
- Different layer environment: the scene on the fourth floor is simpler, while the scene on the first floor is significantly more complex and contains more semantic objects;
- (2)
- Different light conditions: day and night; light and dark;
- (3)
- Different movement distance: short, medium, and long.
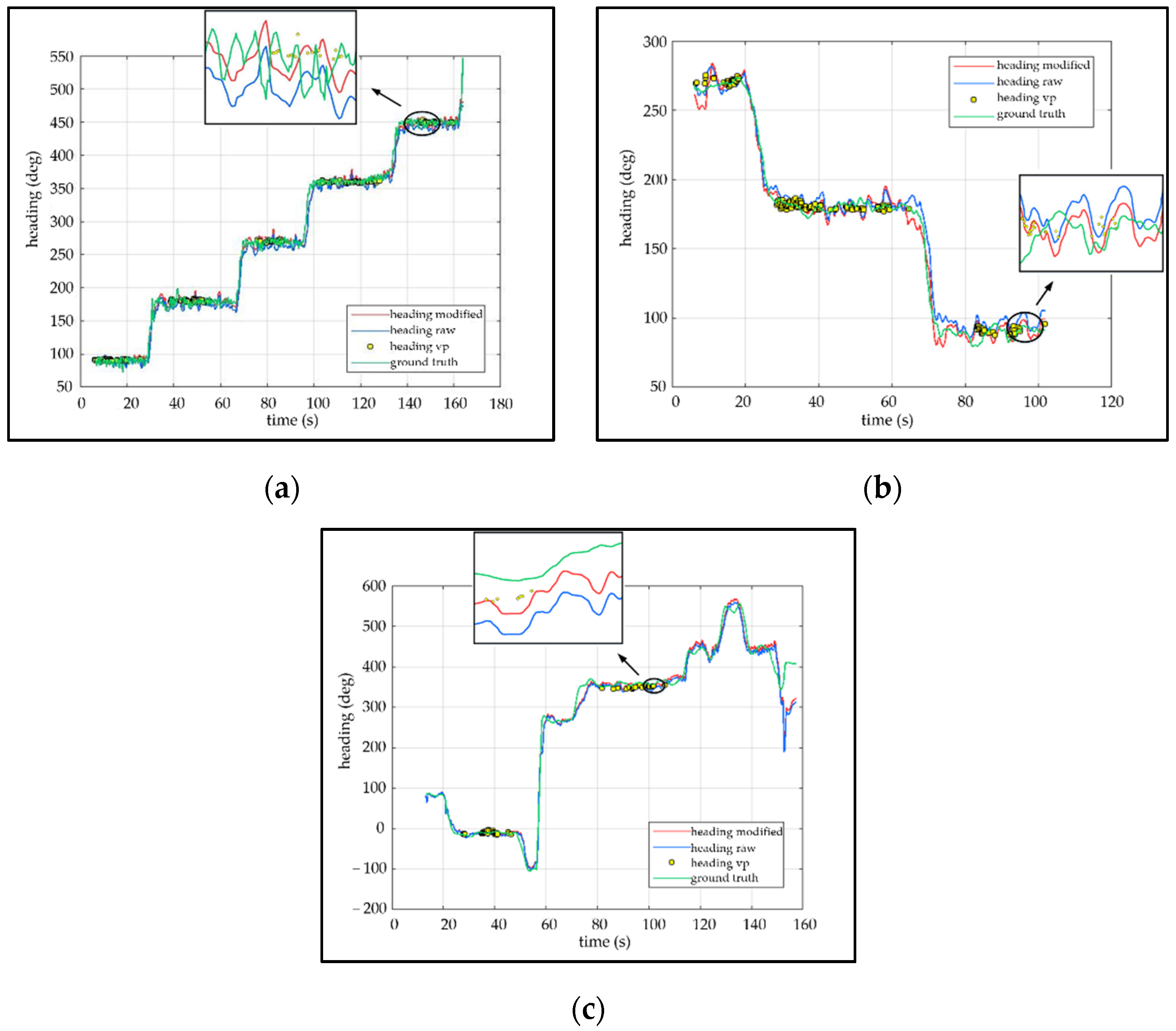
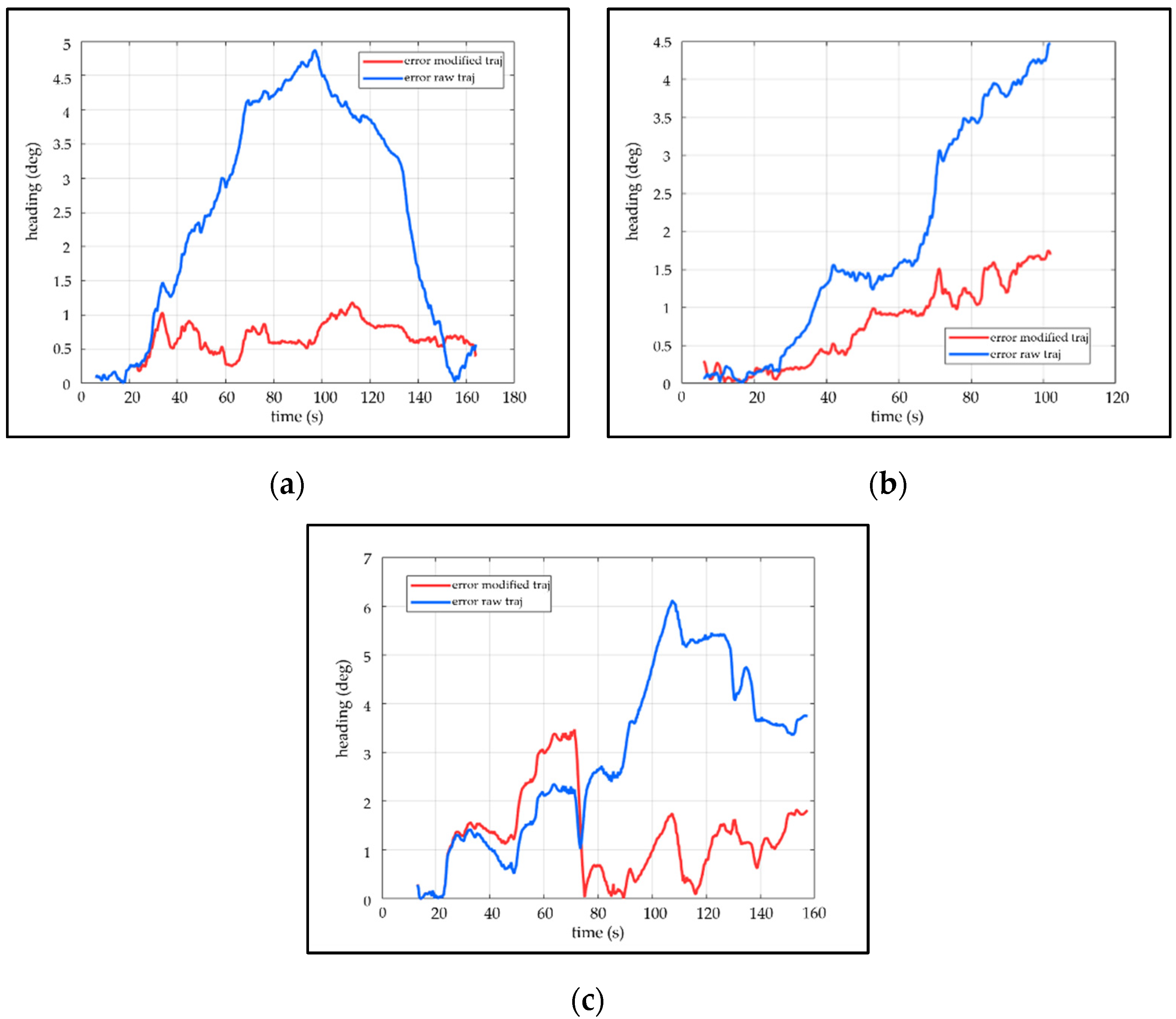
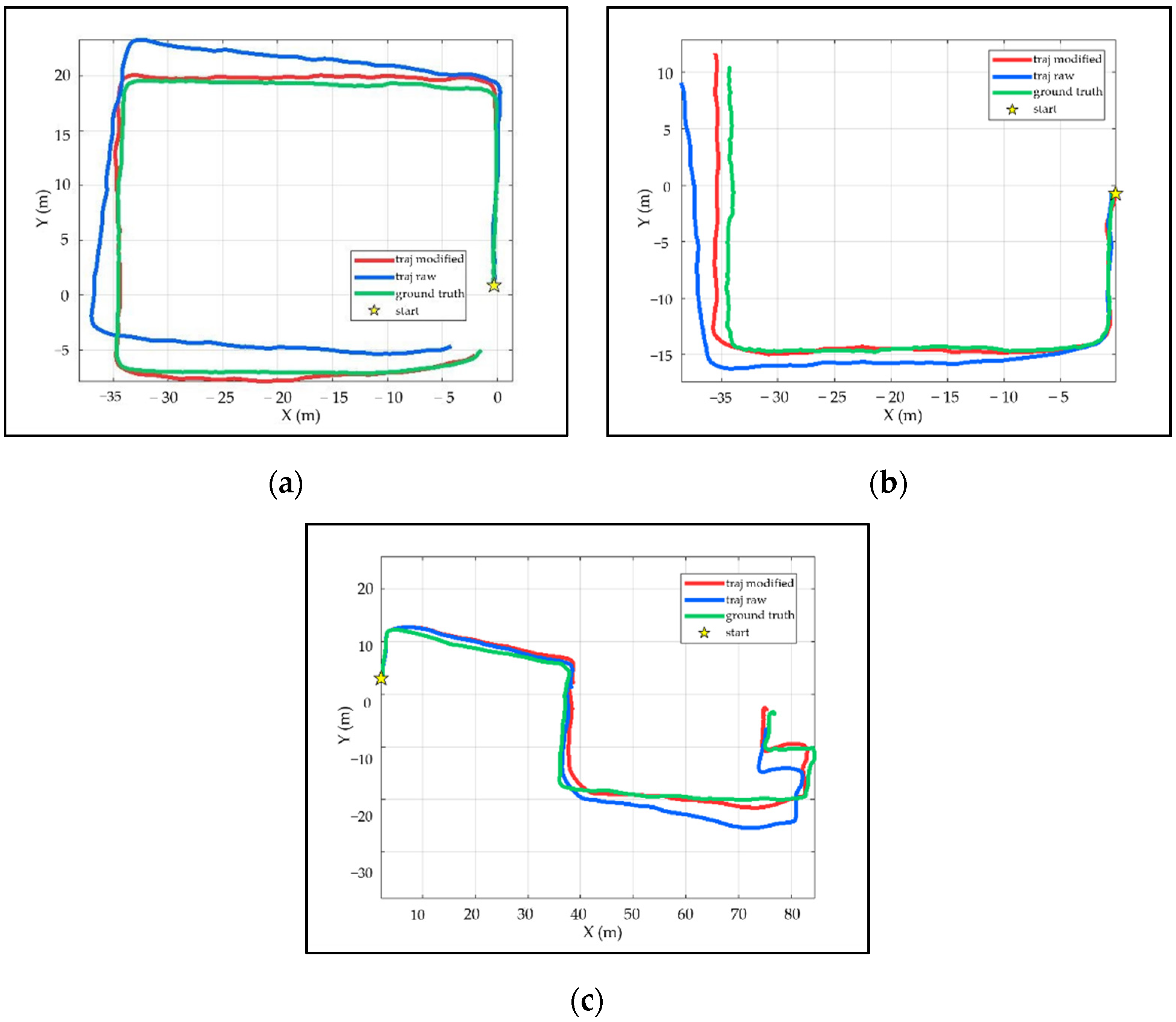
4.2. Performance Evaluation of the Proposed System
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, Y.; Beltrame, G. VIR-SLAM: Visual, inertial, and ranging SLAM for single and multi-robot systems. Auton. Robot. 2021, 45, 905–917. [Google Scholar] [CrossRef]
- Tchuiev, V.; Indelman, V. Distributed Consistent Multi-Robot Semantic Localization and Mapping. IEEE Robot. Autom. Lett. 2020, 5, 4649–4656. [Google Scholar] [CrossRef]
- Li, F.; Chen, W.; Xu, W.; Huang, L.; Li, D.; Cai, S.; Yang, M.; Xiong, X.; Liu, Y.; Li, W. A Mobile Robot Visual SLAM System With Enhanced Semantics Segmentation. IEEE Access. 2020, 8, 25442–25458. [Google Scholar] [CrossRef]
- Sun, Y.; Zuo, W.; Liu, M. RTFNet: RGB-Thermal Fusion Network for Semantic Segmentation of Urban Scenes. IEEE Robot. Autom. Lett. 2019, 4, 2576–2583. [Google Scholar] [CrossRef]
- Li, J.-N.; Wang, L.-H.; Li, Y.; Zhang, J.-F.; Li, D.-X.; Zhang, M. Local optimized and scalable frame-to-model SLAM. Multimedia Tools Appl. 2015, 75, 8675–8694. [Google Scholar] [CrossRef]
- Cheng, J.; Kim, J.; Shao, J.; Zhang, W. Robust linear pose graph-based SLAM. Robot. Auton. Syst. 2015, 72, 71–82. [Google Scholar] [CrossRef]
- Chen, H.; Hu, W.; Yang, K.; Bai, J.; Wang, K. Panoramic Annular SLAM with Loop Closure and Global Optimization. Appl. Opt. 2021, 60, 6264–6275. [Google Scholar] [CrossRef]
- Lee, J.-K.; Yoon, K.-J. Real-Time Joint Estimation of Camera Orientation and Vanishing Points. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1866–1874. [Google Scholar]
- Vidal, A.R.; Rebecq, H.; Horstschaefer, T.; Scaramuzza, D. Ultimate SLAM? Combining Events, Images, and IMU for Robust Visual SLAM in HDR and High-Speed Scenarios. IEEE Robot. Autom. Lett. 2018, 3, 994–1001. [Google Scholar] [CrossRef] [Green Version]
- Edgar, S.; Jean-Bernard, H. Bayesian Scale Estimation for Monocular SLAM Based on Generic Object Detection for Correcting Scale Drift. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5152–5158. [Google Scholar]
- Qin, T.; Zheng, Y.; Chen, T.; Chen, Y.; Su, Q. RoadMap: A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Li, P.; Zhang, G.; Zhou, J.; Yao, R.; Zhang, X. Study on Slam Algorithm Based on Object Detection in Dynamic Scene. In Proceedings of the 2019 International Conference on Advanced Mechatronic Systems (ICAMechS), Kusatsu, Japan, 26–28 August 2019; pp. 363–367. [Google Scholar]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual–inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Shen, S. Monocular Visual–Inertial State Estimation With Online Initialization and Camera–IMU Extrinsic Calibration. IEEE Trans. Autom. Sci. Eng. 2017, 14, 39–51. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardos, J.D. Visual-Inertial Monocular SLAM With Map Reuse. IEEE Robot. Autom. Lett. 2017, 2, 796–803. [Google Scholar] [CrossRef] [Green Version]
- Shen, S.; Michael, N.; Kumar, V. Autonomous Multi-Floor Indoor Navigation with a Computationally Constrained MAV. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 20–25. [Google Scholar]
- Shen, S.; Michael, N.; Kumar, V. Tightly-Coupled Monocular Visual-Inertial Fusion for Autonomous Flight of Rotorcraft MAVs. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5303–5310. [Google Scholar]
- Engel, J.; Schops, T.; Cremers, D. LSD-SLAM: Large-Scale Direct Monocular SLAM. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 834–849. [Google Scholar]
- Raul, M.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, B.; Jiang, C.; Xue, W.; Li, Q. A LiDAR/Visual SLAM Backend with Loop Closure Detection and Graph Optimization. Remote. Sens. 2021, 13, 2720. [Google Scholar] [CrossRef]
- Kong, D.; Zhang, Y.; Dai, W. Direct Near-Infrared-Depth Visual SLAM with Active Lighting. IEEE Robot. Autom. Lett. 2021, 6, 7057–7064. [Google Scholar] [CrossRef]
- Zhou, H.; Zou, D.; Pei, L.; Ying, R.; Liu, P.; Yu, W. StructSLAM: Visual SLAM With Building Structure Lines. IEEE Trans. Veh. Technol. 2015, 64, 1364–1375. [Google Scholar] [CrossRef]
- Camposeco, F.; Pollefeys, M. Using vanishing points to improve visual-inertial odometry. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5219–5225. [Google Scholar]
- Luo, H.; Pape, C.; Reithmeier, E. Hybrid Monocular SLAM Using Double Window Optimization. IEEE Robot. Autom. Lett. 2021, 6, 4899–4906. [Google Scholar] [CrossRef]
- Fraundorfer, F.; Scaramuzza, D. Visual Odometry: Part II: Matching, Robustness, Optimization, and Applications. IEEE Robot. Autom. Mag. 2012, 19, 78–90. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Zhang, H.; Wang, P.; Nogueira, L.; Scherer, S. Super Odometry IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environments. arXiv 2021, arXiv:2104.14938v1. [Google Scholar]
- Khattak, S.; Nguyen, H.; Mascarich, F.; Dang, T.; Alexis, K. Complementary Multi–Modal Sensor Fusion for Resilient Robot Pose Estimation in Subterranean Environments. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1024–1029. [Google Scholar]
- Camurri, M.; Ramezani, M.; Nobili, S.; Fallon, M. Pronto: A Multi-Sensor State Estimator for Legged Robots in Real-World Scenarios. Front. Robot. AI 2020, 7, 68. [Google Scholar] [CrossRef]
- Liu, J.; Gao, W.; Hu, Z. Bidirectional Trajectory Computation for Odometer-Aided Visual-Inertial SLAM. IEEE Robot. Autom. Lett. 2021, 6, 1670–1677. [Google Scholar] [CrossRef]
- Bescos, B.; Campos, C.; Tardos, J.D.; Neira, J. DynaSLAM II: Tightly-Coupled Multi-Object Tracking and SLAM. IEEE Robot. Autom. Lett. 2021, 6, 5191–5198. [Google Scholar] [CrossRef]
- Cipolla, R.; Drummond, T.; Robertson, D. Camera Calibration from Vanishing Points in Image ofArchitectural Scenes. Br. Mach. Vis. Conf. 1999, 38, 382–391. [Google Scholar] [CrossRef]
- Khac, C.; Choi, Y.; Park, J.; Jung, H.-Y. A Robust Road Vanishing Point Detection Adapted to the Real-world Driving Scenes. Sensors 2021, 21, 2133. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhu, L.; Yu, Z.; Guo, B.; Wan, Y. Vanishing Point Detection and Rail Segmentation Based on Deep Multi-Task Learning. IEEE Access 2020, 8, 163015–163025. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef] [Green Version]
- Kocur, V.; Ftacnik, M. Traffic Camera Calibration via Vehicle Vanishing Point Detection. arXiv 2021, arXiv:2103.11438. [Google Scholar]
- Jahromi, A.B.; Sohn, G. Geometric Context and Orientation Map Combination for Indoor Corridor Modeling Using a Single Image. ISPRS 2016, XLI-B4, 295–302. [Google Scholar] [CrossRef]
- Ding, W.; Li, Y. Efficient vanishing point detection method in complex urban road environments. IET Comput. Vis. 2015, 9, 549–558. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, M.; Dellaert, F.; Scaramuzza, D. IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation; Georgia Institute of Technology: Atlanta, GA, USA, 2015; Volume 2015. [Google Scholar]
- Ho, N.-H.; Truong, P.H.; Jeong, G.-M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors 2016, 16, 1423. [Google Scholar] [CrossRef] [PubMed]
- Ji, Y.; Yamashita, A.; Asama, H. RGB-D SLAM using vanishing point and door plate information in corridor environment. Intell. Serv. Robot. 2015, 8, 105–114. [Google Scholar] [CrossRef]
- Ni, D.; Ji, P.; Song, A. Vanishing point detection in corridor for autonomous mobile robots using monocular low-resolution fisheye vision. Adv. Mech. Eng. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Cortés, S.; Solin, A.; Rahtu, E.; Kannala, J. ADVIO: An Authentic Dataset for Visual-Inertial Odometry. In Proceedings of the 15th European Conference, Munich, Germany, 8–14 September 2018; pp. 425–440. [Google Scholar]
- Yu, C.; Liu, Z.; Liu, X.-J.; Xie, F.; Yang, Y.; Wei, Q.; Fei, Q. DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1168–1174. [Google Scholar]
- Sheng, C.; Pan, S.; Gao, W.; Tan, Y.; Zhao, T. Dynamic-DSO: Direct Sparse Odometry Using Objects Semantic Information for Dynamic Environments. Appl. Sci. 2020, 10, 1467. [Google Scholar] [CrossRef] [Green Version]
- Solin, A.; Cortes, S.; Rahtu, E.; Kannala, J. Inertial Odometry on Handheld Smartphones. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1361–1368. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Qin, T.; Pan, J.; Cao, S.; S, S. A General Optimization-Based Framework for Local Odometry Estimation with Multiple Sensors. arXiv 2019, arXiv:1901.03638. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Smartphone 01 | Smartphone 02 | |
|---|---|---|---|
| Intrinsic | 1082.4 | 392.92 | |
| 1084.4 | 392.82 | ||
| 364.6778 | 186.19 | ||
| 643.3080 | 247.80 | ||
| Distortion Coefficient | 0.0366 | −0.0028 | |
| 0.0803 | 0.002 | ||
| 0.000783 | 0 | ||
| −0.0002 | 0 | ||
| Extrinsic | |||
| Sequence | Source | Original Visual-Inertial SLAM [°] | Our Proposed Method [°] | Improvements [%] |
|---|---|---|---|---|
| 01 | self-collected | 6.4521 | 1.3709 | 78.75 |
| 02 | self-collected | 4.1428 | 0.2807 | 93.22 |
| Advio_17 | public | 6.2999 | 1.6886 | 73.20 |
| Sequence | Source | Original Visual-Inertial SLAM [m] | Our Proposed Method [m] | Improvements [%] |
|---|---|---|---|---|
| 01 | self-collected | 2.5521 | 0.63486 | 75.12 |
| 02 | self-collected | 1.8314 | 0.76699 | 58.12 |
| Advio_17 | public | 2.8541 | 1.2832 | 55.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chai, W.; Li, C.; Zhang, M.; Sun, Z.; Yuan, H.; Lin, F.; Li, Q. An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments. Sensors 2021, 21, 7428. https://doi.org/10.3390/s21227428
Chai W, Li C, Zhang M, Sun Z, Yuan H, Lin F, Li Q. An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments. Sensors. 2021; 21(22):7428. https://doi.org/10.3390/s21227428
Chicago/Turabian StyleChai, Wennan, Chao Li, Mingyue Zhang, Zhen Sun, Hao Yuan, Fanyu Lin, and Qingdang Li. 2021. "An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments" Sensors 21, no. 22: 7428. https://doi.org/10.3390/s21227428
APA StyleChai, W., Li, C., Zhang, M., Sun, Z., Yuan, H., Lin, F., & Li, Q. (2021). An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments. Sensors, 21(22), 7428. https://doi.org/10.3390/s21227428