
A Quantitative Model for Optical Coherence Tomography

 , , , and
, , , and
Abstract
:1. Introduction
2. Experiments
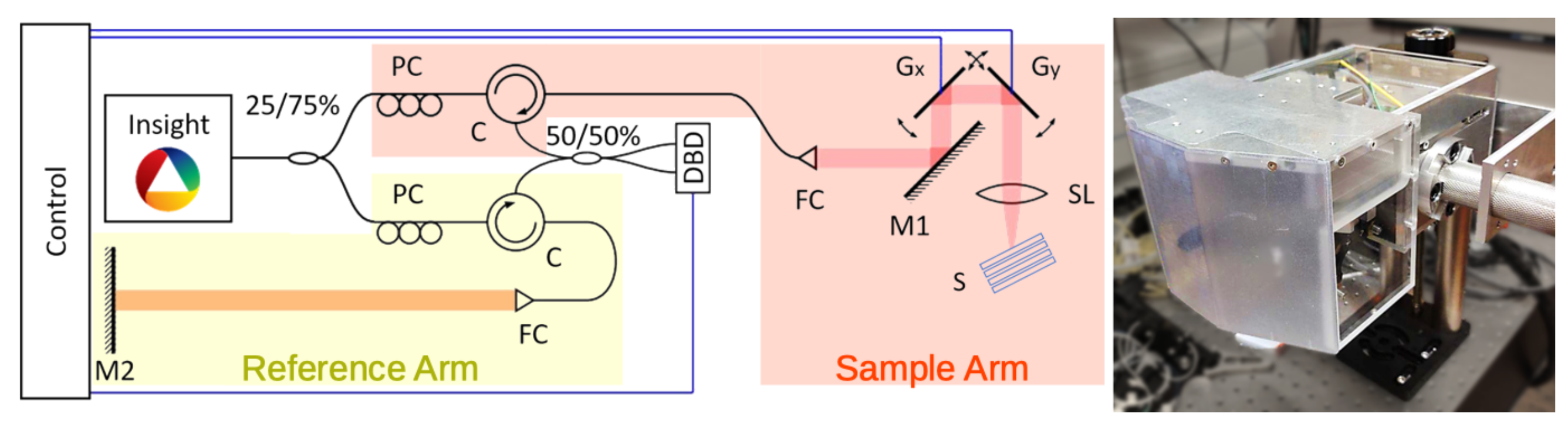
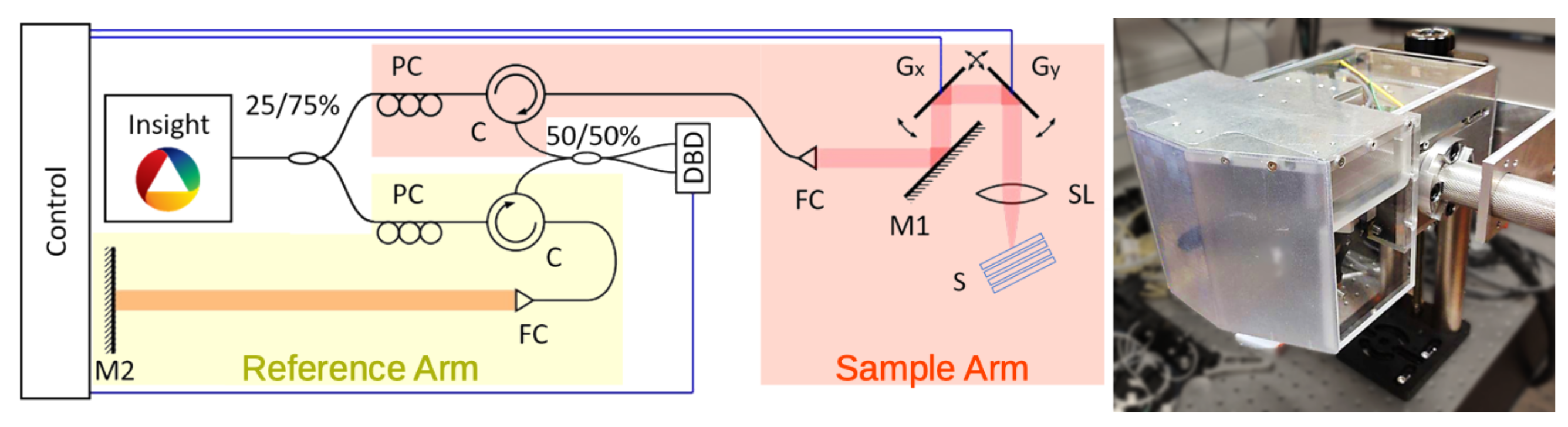
2.1. OCT Setup and Post-Processing
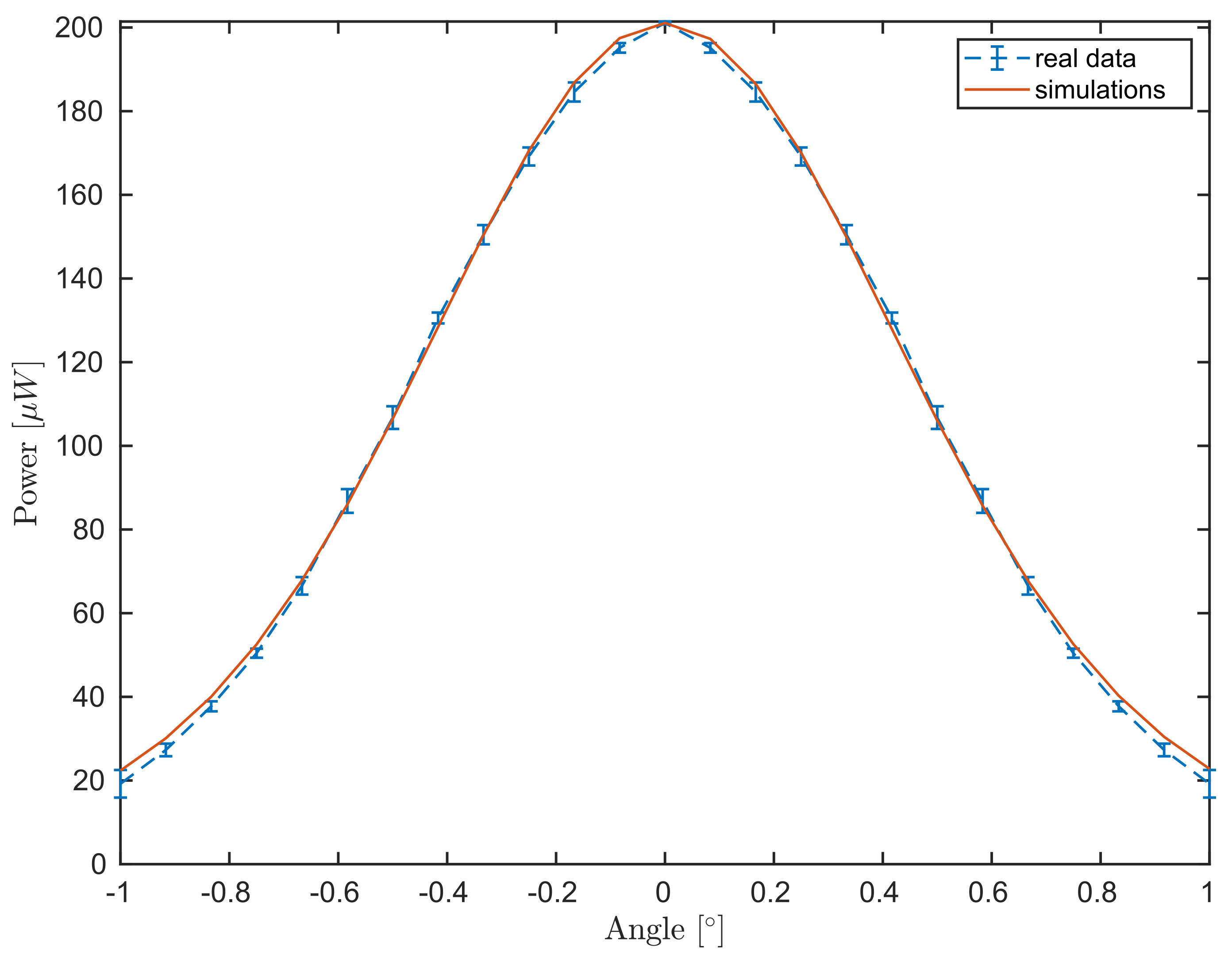
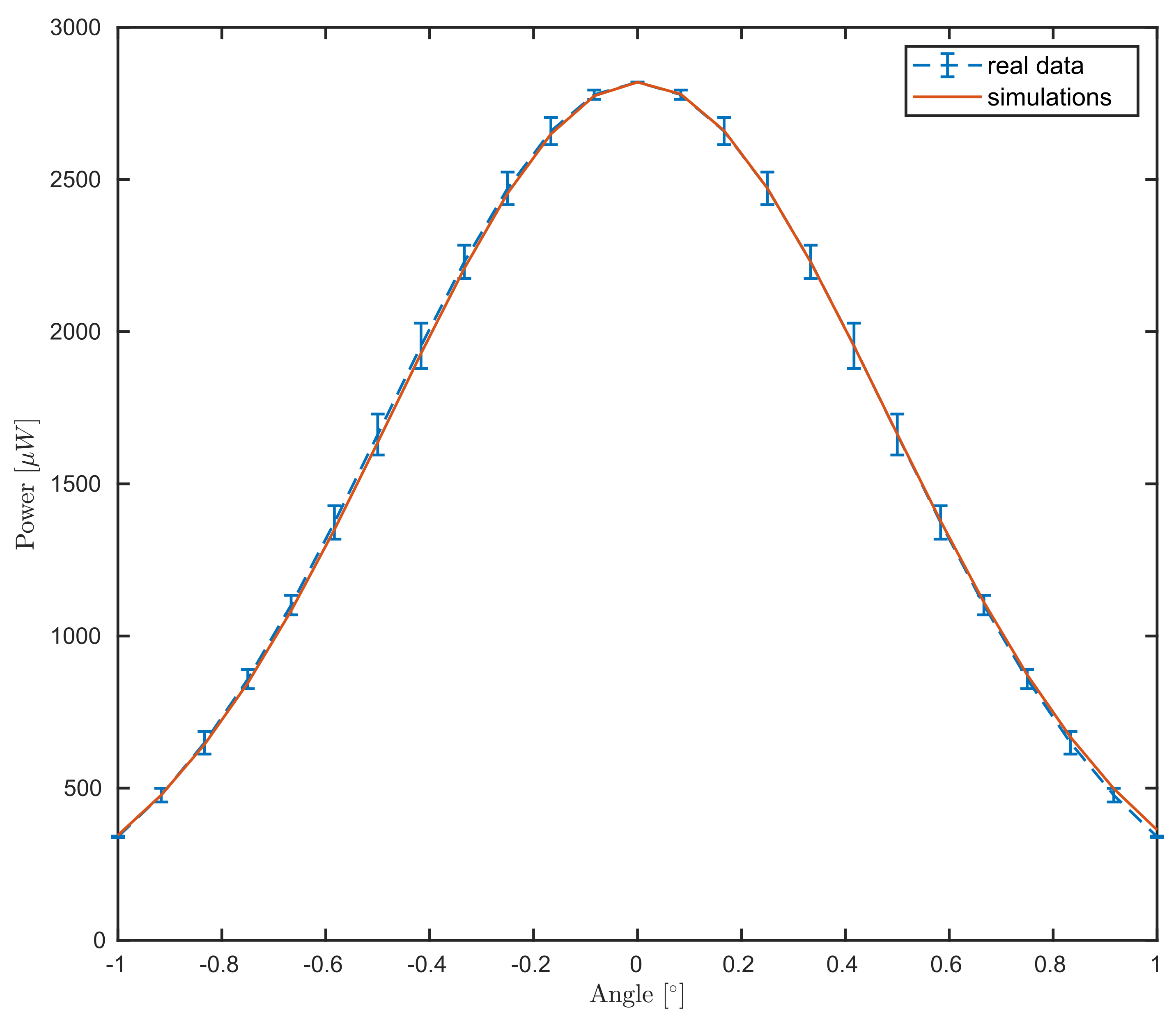
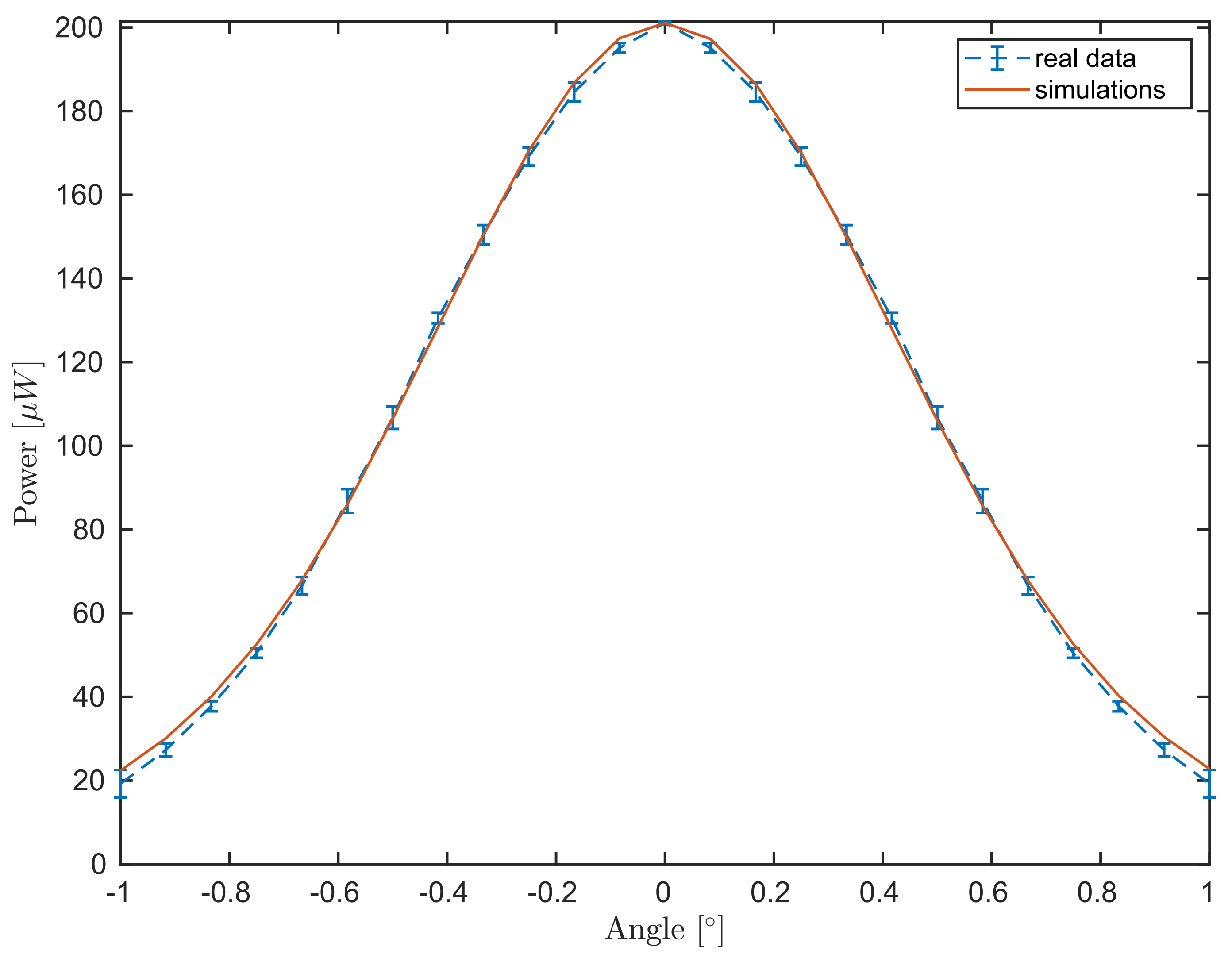
2.2. Power vs. Angle
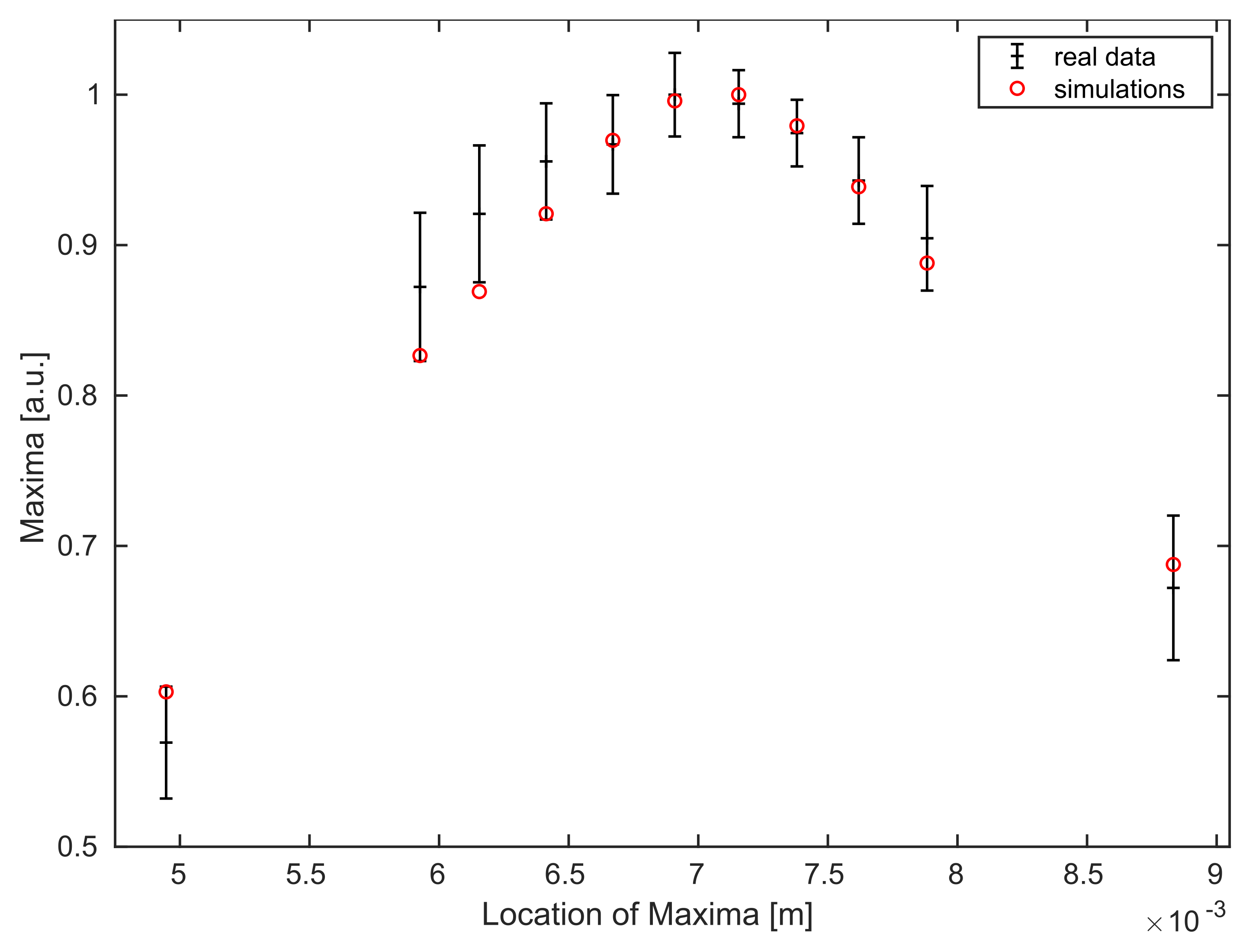
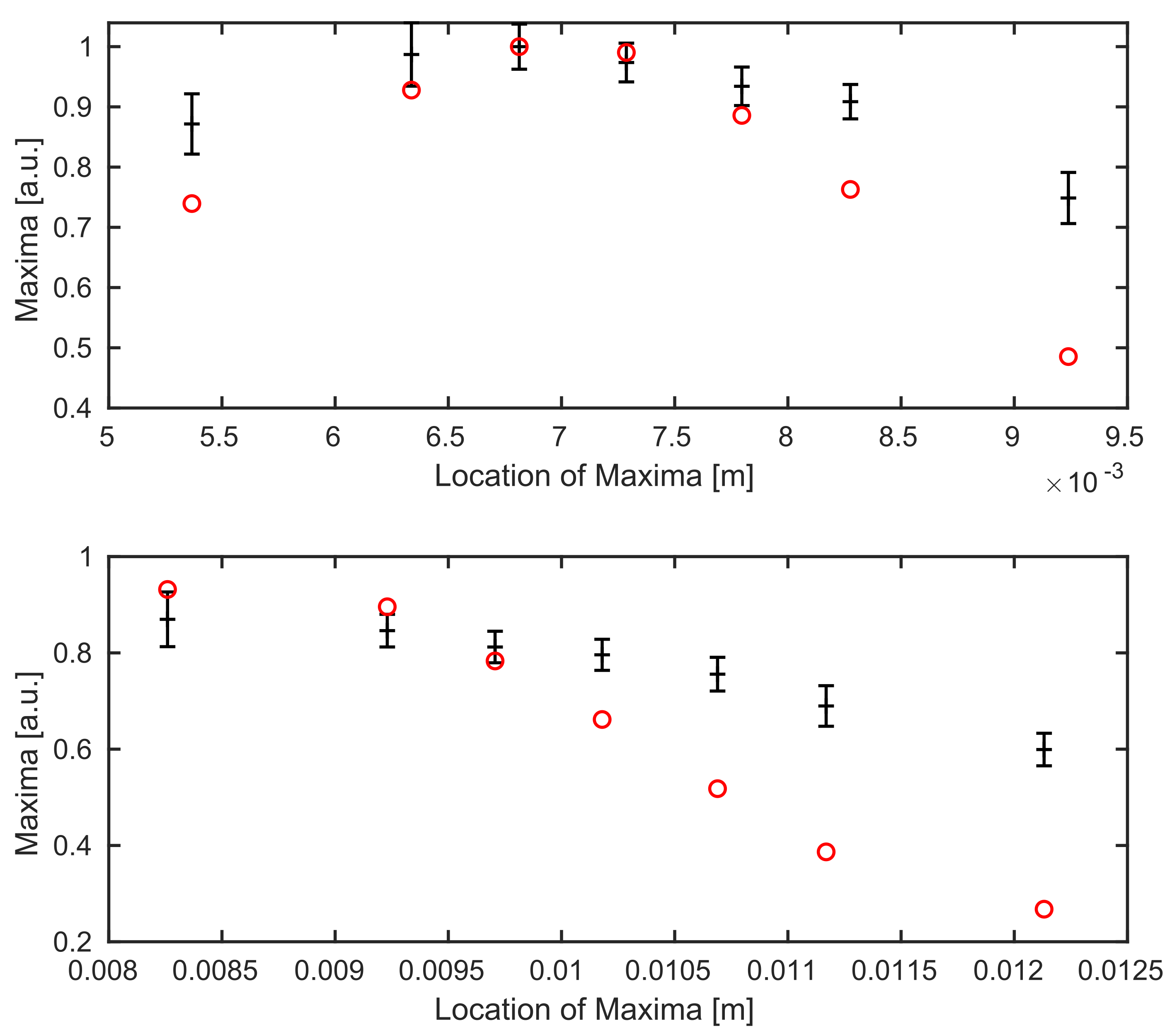
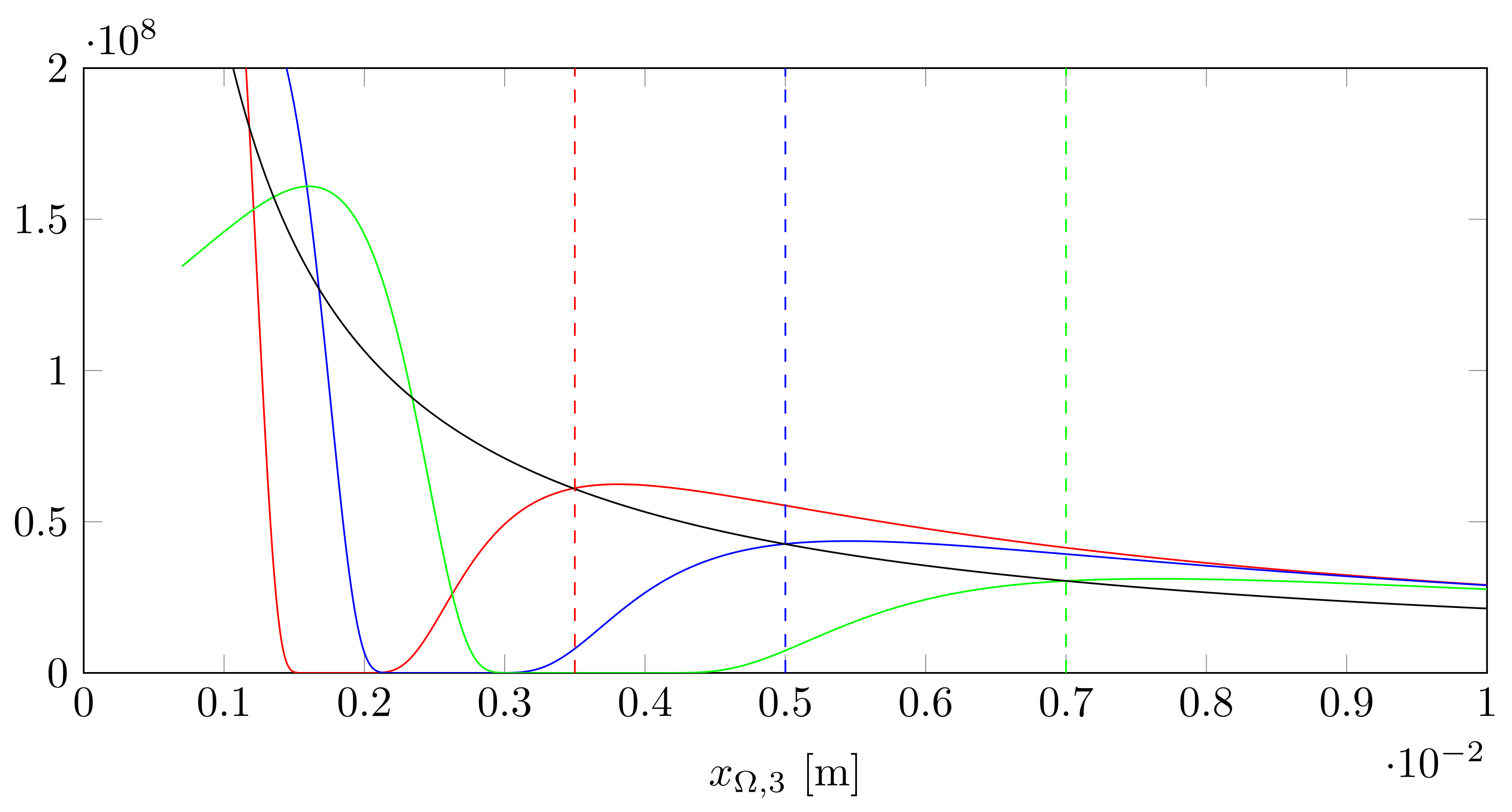
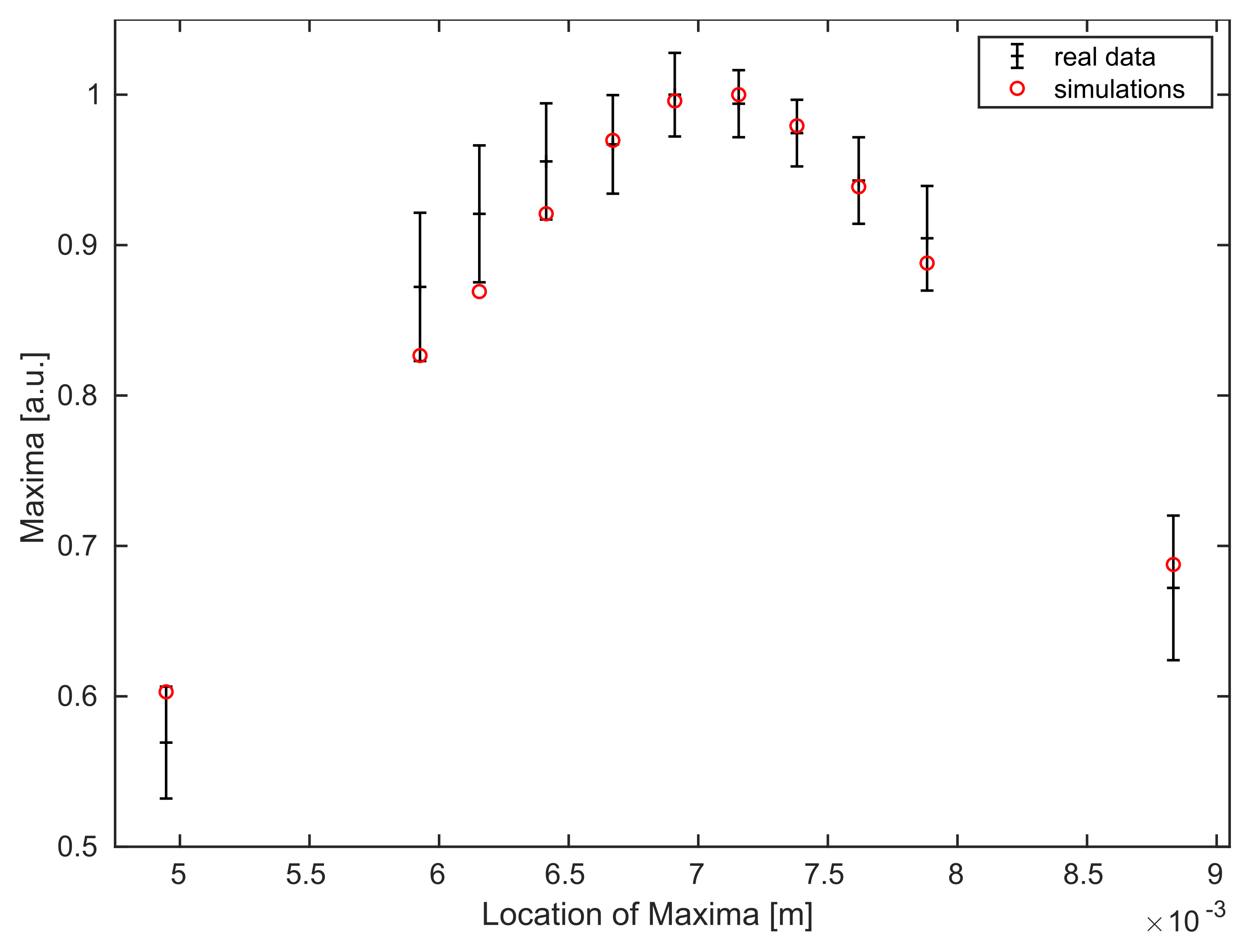
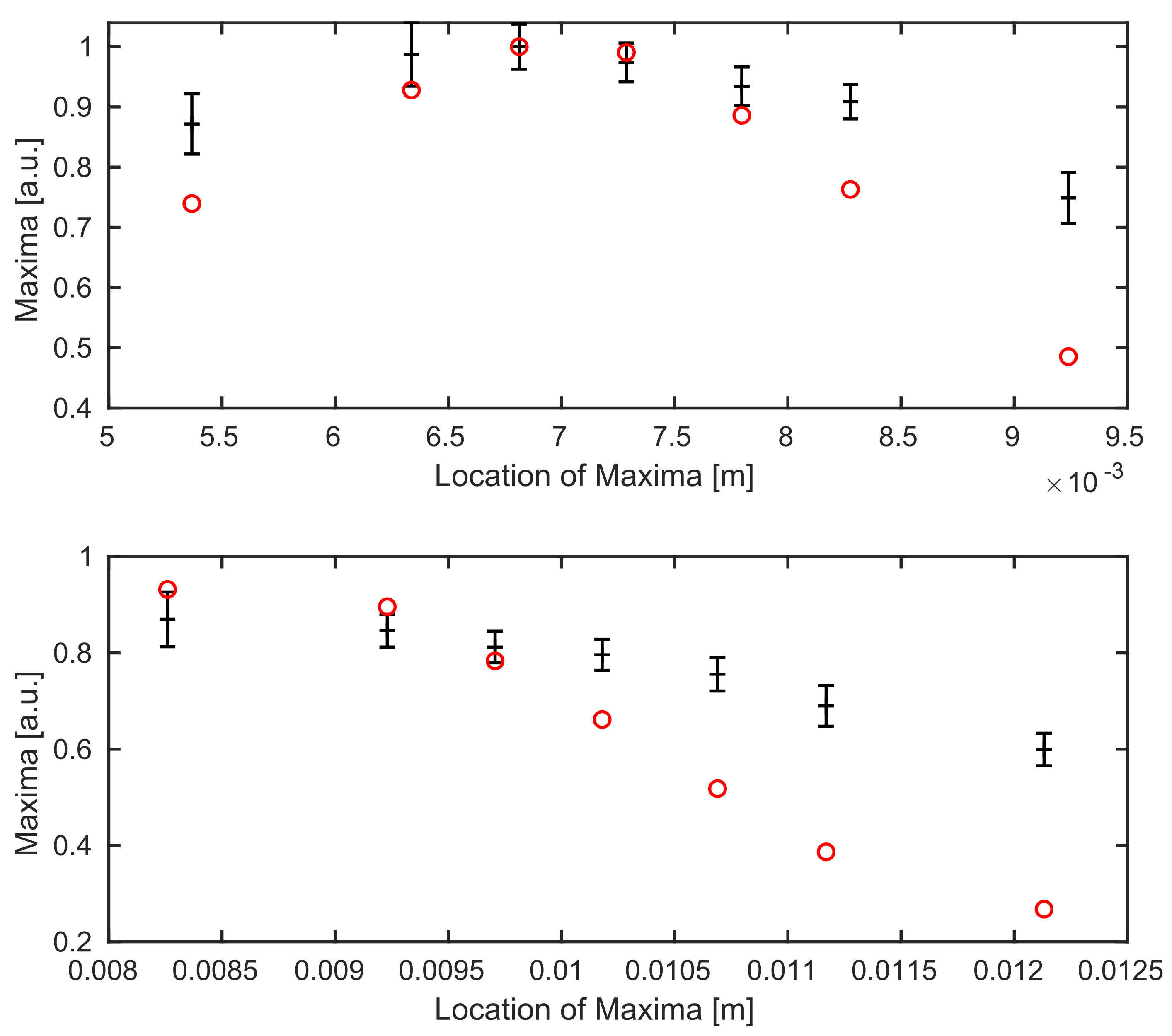
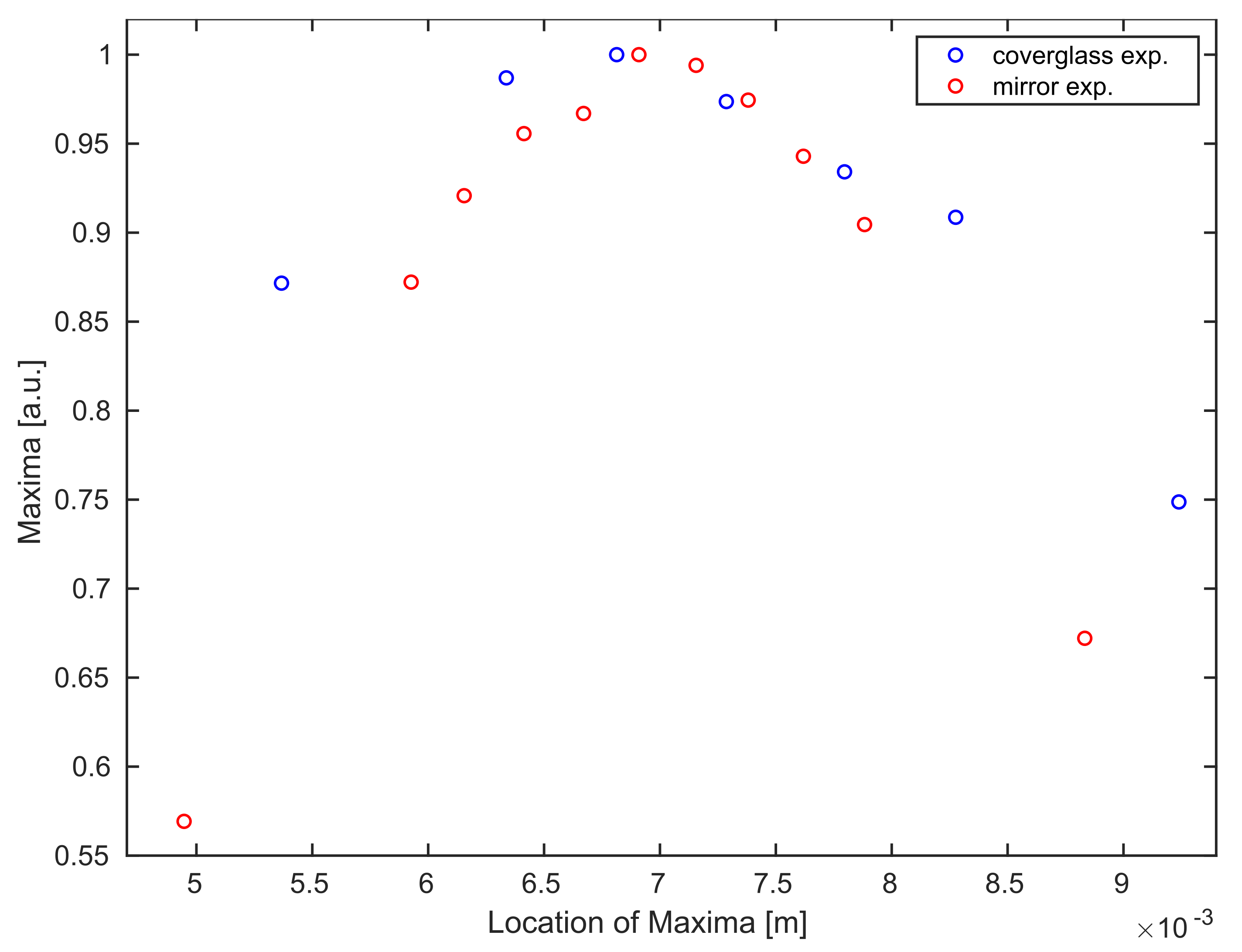
2.3. Power vs. Focus
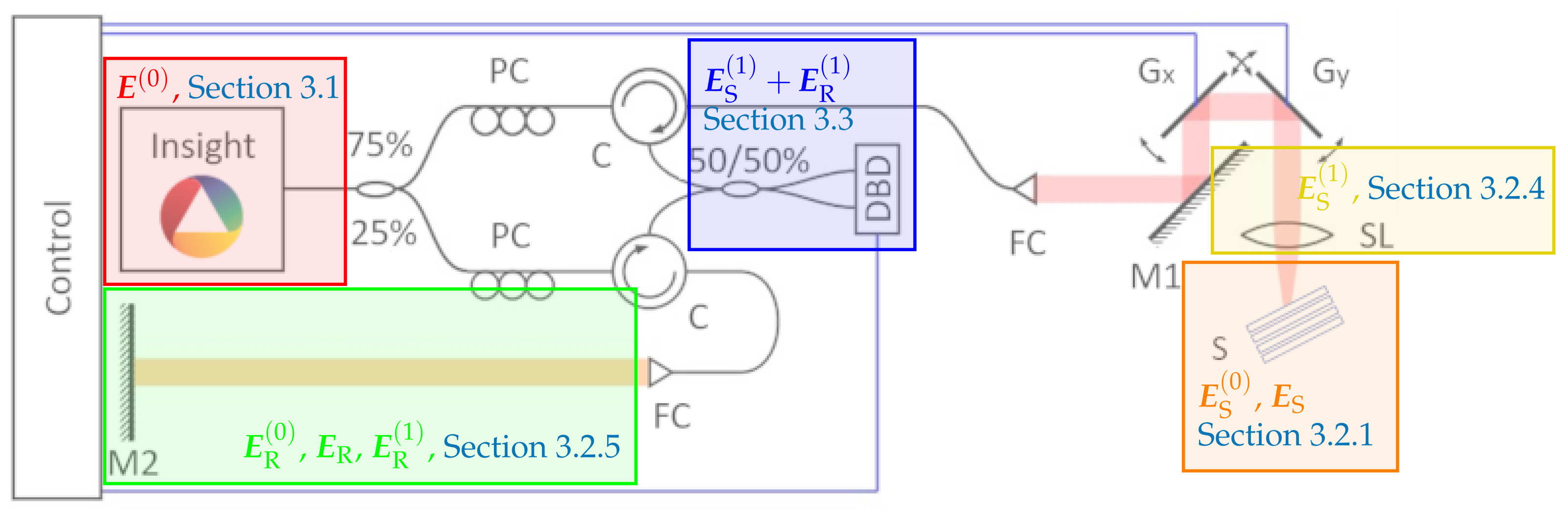
3. Mathematical Model
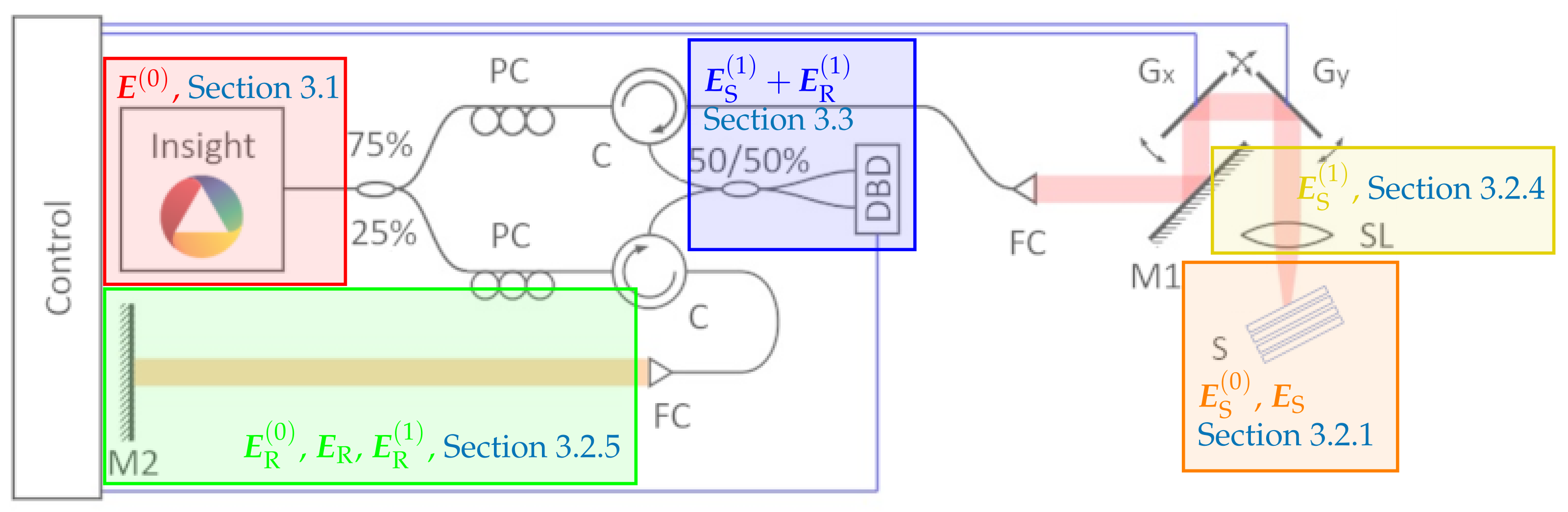
3.1. Gaussian Beam Illumination
3.2. Backscattered Gaussian Fields
3.2.1. The Sample Field
3.2.2. Far Field Method
3.2.3. Comparing the Near- and the Far-Fields
3.2.4. The Scan Lens
3.2.5. The Reference Field
3.3. OCT Measurements
4. Calibration of the Model
4.1. Angular Dependence of the Measured Power
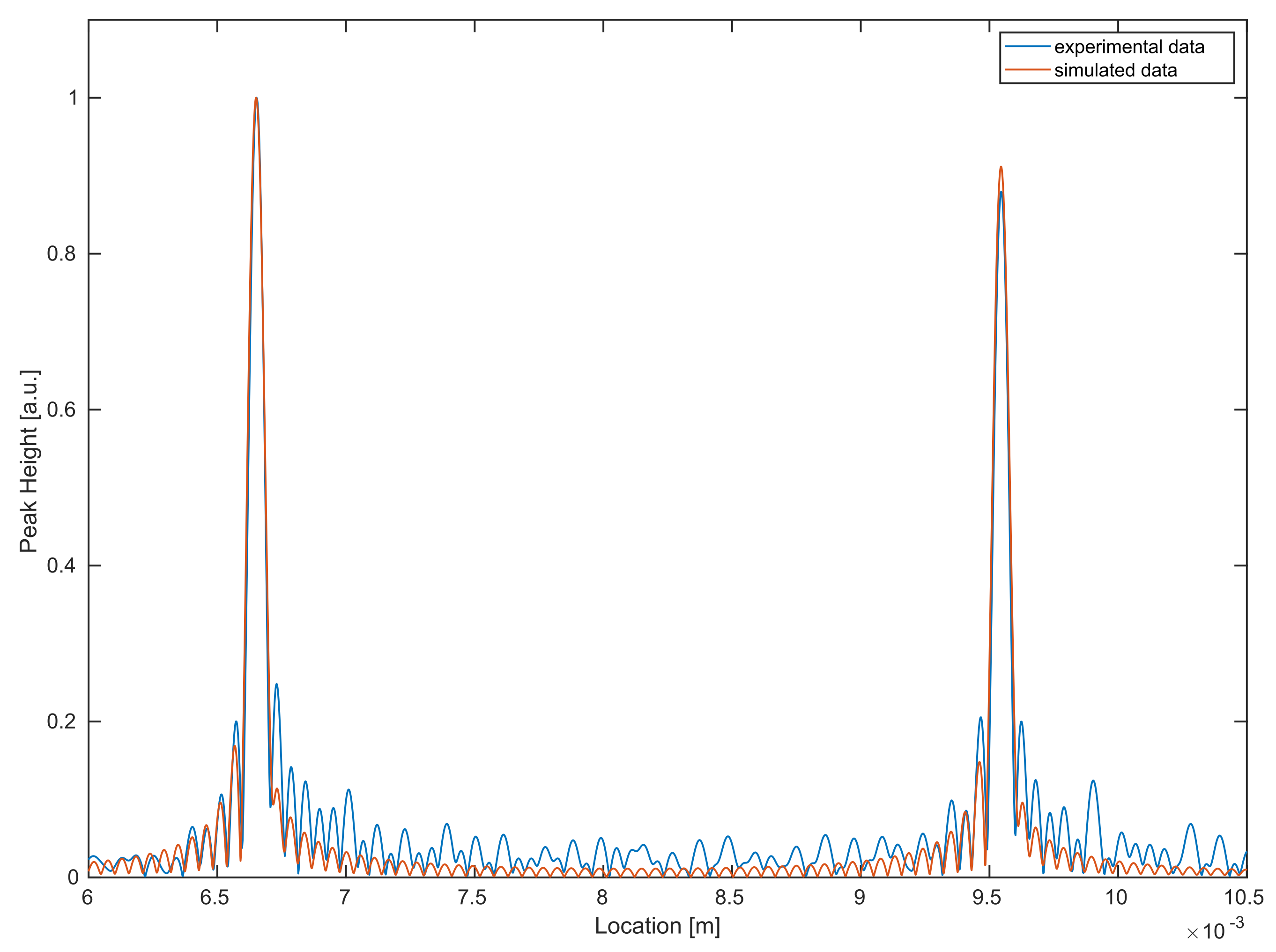
4.2. Reconstructing Sample Information from an OCT Experiment
5. Results
5.1. Power vs. Angle—Experiment
| Algorithm 1: Extraction method for the beam radius and the angle of acceptance. |
| Result: and |
| Input: wavenumber with the central wavelength , , |
| for ; |
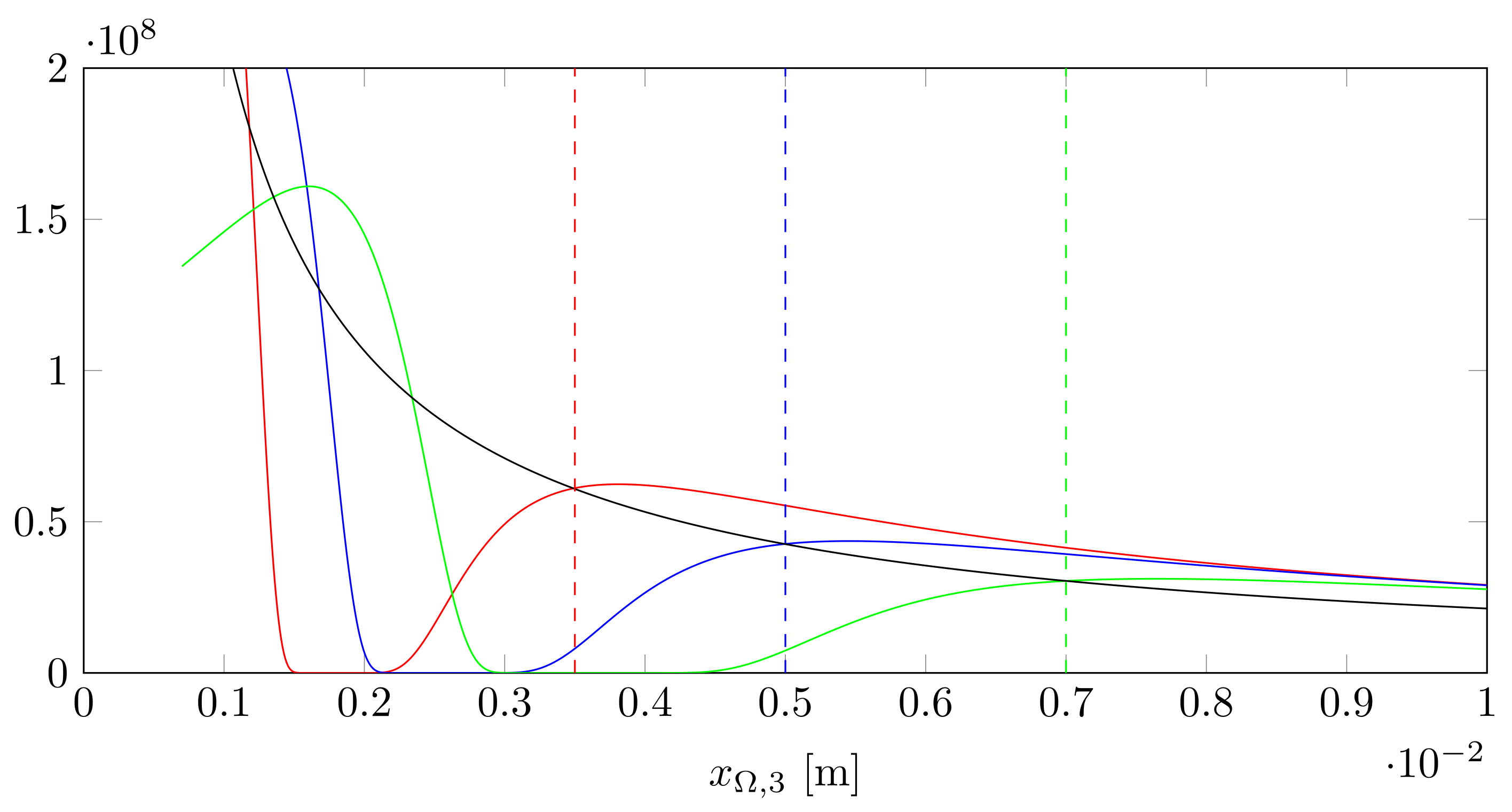
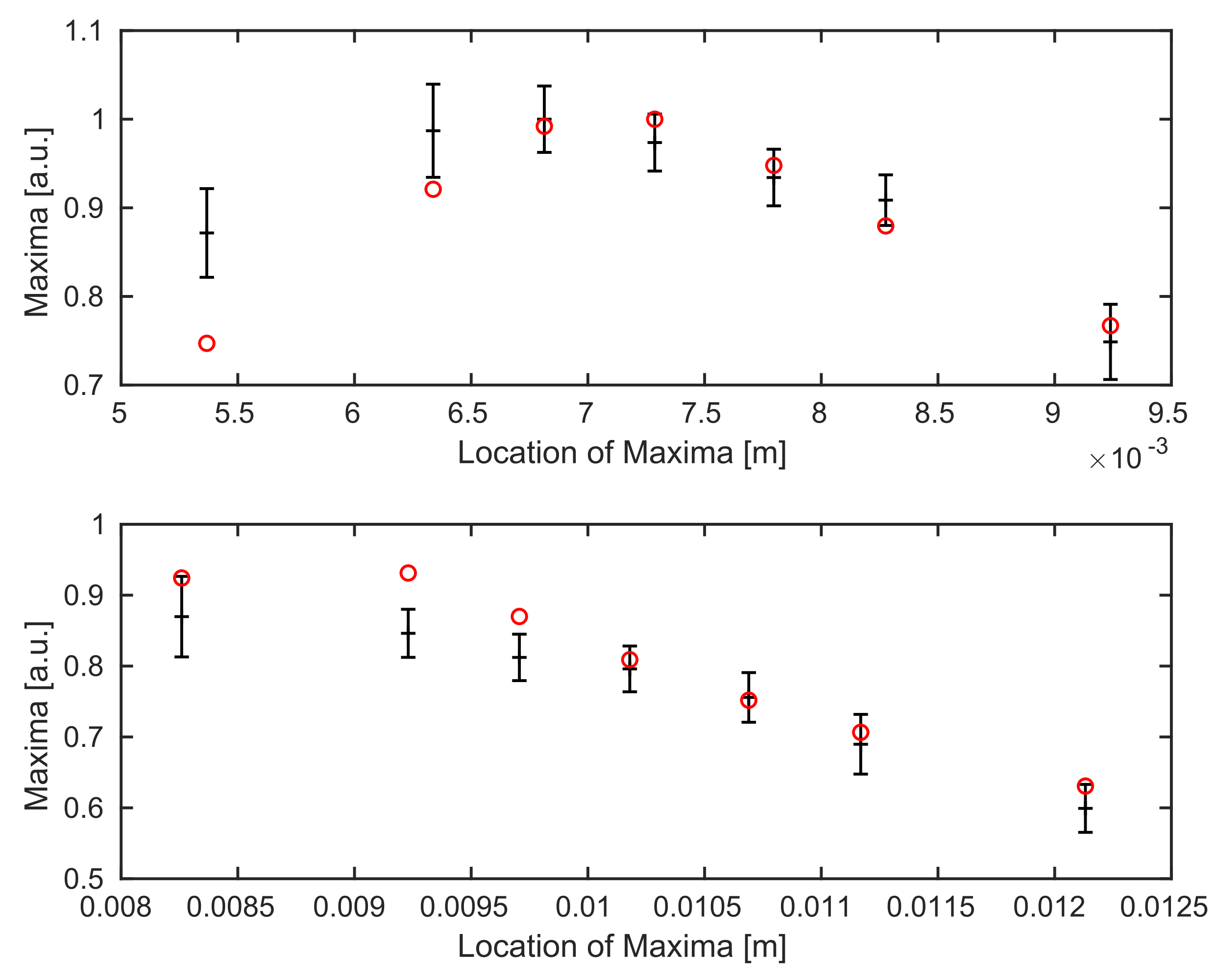
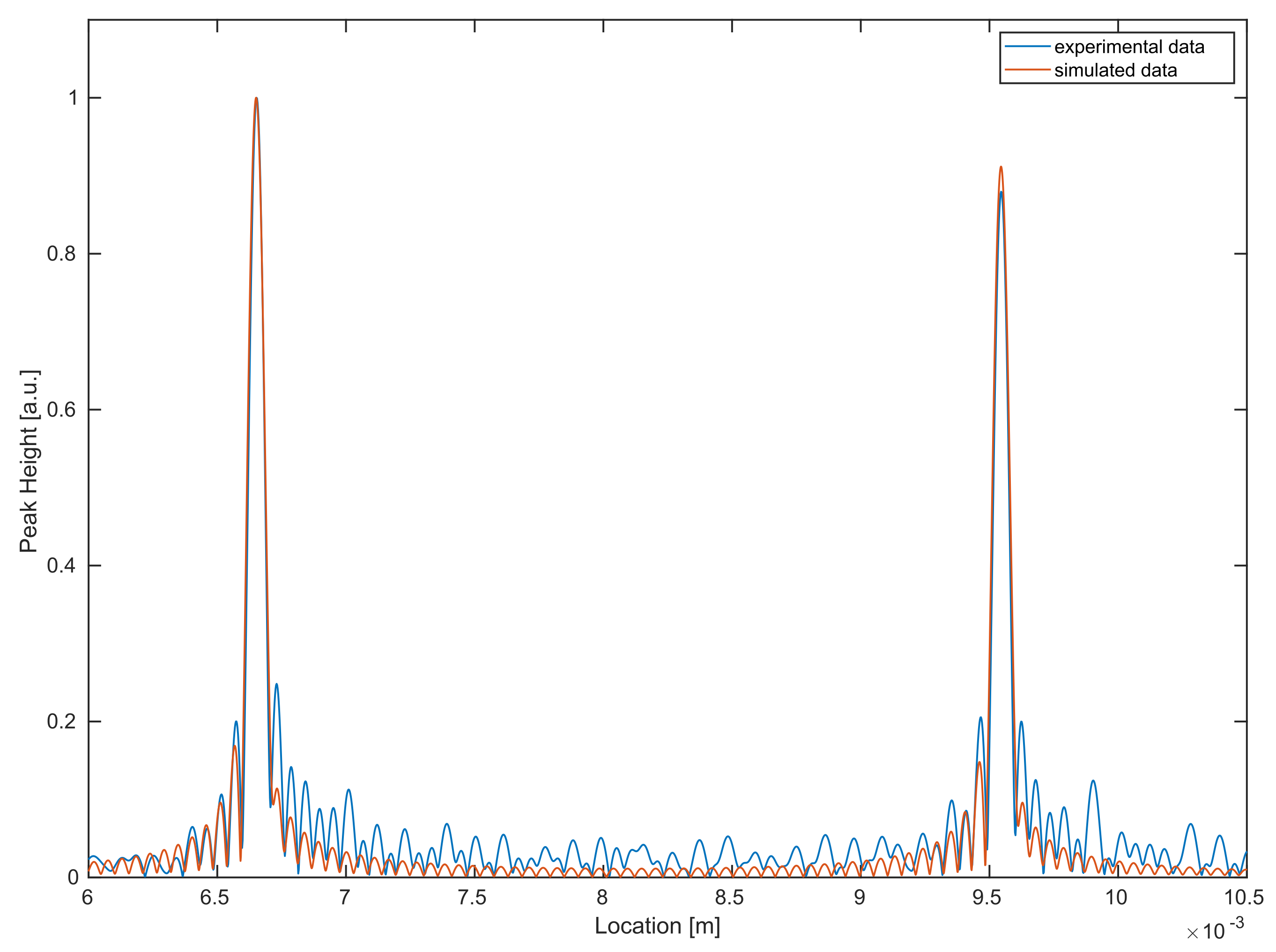
5.2. Power vs. Focus—Experiment
| Algorithm 2: Extraction scheme for the tilting angle and the thickness d from the power vs. focus experiment. |
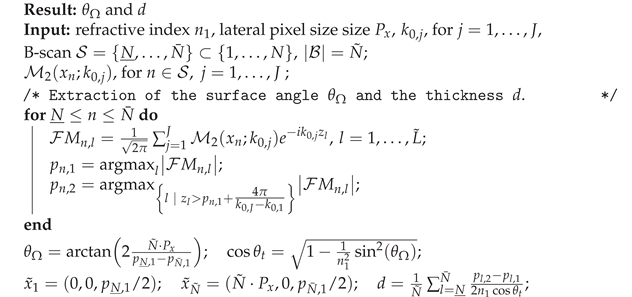 |
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- For , this leads to the integralAfter a change of variables , we obtain
- For we find in the same way
- Similarly, for we obtainwhich is constant with respect to
- Following the same procedure, the remaining integrals for are of the formfor a given pre-factor
References
- Fercher, A.F.; Mengedoht, K.; Werner, W. Eye-length measurement by interferometry with partially coherent light. Opt. Lett. 1988, 13, 186. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Swanson, E.; Lin, C.; Schuman, J.; Stinson, W.; Chang, W.; Hee, M.; Flotte, T.; Gregory, K.; Puliafito, C.; et al. Optical coherence tomography. Science 1991, 254, 1178–1181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drexler, W.; Fujimoto, J.G. Optical Coherence Tomography: Technology and Applications; Biological and Medical Physics, Biomedical Engineering; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Khan, H.A.; Mehmood, A.; Khan, Q.A.; Iqbal, F.; Rasheed, F.; Khan, N.; Pizzimenti, J.J. A major review of optical coherence tomography angiography. Expert Rev. Ophthalmol. 2017, 12, 373–385. [Google Scholar] [CrossRef]
- Baumann, B. Polarization Sensitive Optical Coherence Tomography: A Review of Technology and Applications. Appl. Sci. 2017, 7, 474. [Google Scholar] [CrossRef]
- Zaitsev, V.Y.; Matveyev, A.L.; Matveev, L.A.; Sovetsky, A.A.; Hepburn, M.S.; Mowla, A.; Kennedy, B.F. Strain and elasticity imaging in compression optical coherence elastography: The two-decade perspective and recent advances. J. Biophotonics 2021, 14. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Drexler, W. Optical coherence tomography angiography and photoacoustic imaging in dermatology. Photochem. Photobiol. Sci. 2019, 18, 945–962. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, K.M.; Zilkens, R.; Allen, W.M.; Foo, K.Y.; Fang, Q.; Chin, L.; Sanderson, R.W.; Anstie, J.; Wijesinghe, P.; Curatolo, A.; et al. Diagnostic Accuracy of Quantitative Micro-Elastography for Margin Assessment in Breast-Conserving Surgery. Cancer Res. 2020, 80, 1773–1783. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Albrecht, M.; Schnabel, C.; Mueller, J.; Golde, J.; Koch, E.; Walther, J. In Vivo Endoscopic Optical Coherence Tomography of the Healthy Human Oral Mucosa: Qualitative and Quantitative Image Analysis. Diagnostics 2020, 10, 827. [Google Scholar] [CrossRef] [PubMed]
- Schie, I.W.; Placzek, F.; Knorr, F.; Cordero, E.; Wurster, L.M.; Hermann, G.G.; Mogensen, K.; Hasselager, T.; Drexler, W.; Popp, J.; et al. Morpho-molecular signal correlation between optical coherence tomography and Raman spectroscopy for superior image interpretation and clinical diagnosis. Sci. Rep. 2021, 11, 9951. [Google Scholar] [CrossRef] [PubMed]
- Andersen, P.E.; Thrane, L.; Yura, H.T.; Tycho, A.; Jørgensen, T.M.; Frosz, M.H. Advanced modelling of optical coherence tomography systems. Phys. Med. Biol. 2004, 49, 1307–1327. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Wang, R.K.; Elder, J.B. Theoretical model of optical coherence tomography for system optimization and characterization. J. Opt. Soc. Am. 2003, 20, 1792–1803. [Google Scholar] [CrossRef] [PubMed]
- Ralston, T.S.; Marks, D.L.; Carney, P.S.; Boppart, S.A. Inverse scattering for optical coherence tomography. J. Opt. Soc. Am. 2006, 23, 1027–1037. [Google Scholar] [CrossRef] [PubMed]
- Kalkman, J. Fourier-Domain Optical Coherence Tomography Signal Analysisand Numerical Modeling. Int. J. Opt. 2017, 2017. [Google Scholar] [CrossRef]
- Fercher, A.F.; Drexler, W.; Hitzenberger, C.K.; Lasser, T. Optical coherence tomography—Principles and applications. Rep. Prog. Phys. 2003, 66, 239–303. [Google Scholar] [CrossRef]
- Izatt, J.A.; Choma, M.A. Theory of optical coherence tomography. In Optical Coherence Tomography; Drexler, W., Fujimoto, J.G., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 47–72. [Google Scholar]
- Tomlins, P.H.; Wang, R.K. Theory, developments and applications of optical coherence tomography. J. Phys. Appl. Phys. 2005, 38, 2519–2535. [Google Scholar] [CrossRef]
- Drexler, W.; Fujimoto, J.G. Optical Coherence Tomography: Technology and Applications, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Brenner, T.; Munro, P.R.T.; Krüger, B.; Kienle, A. Two-dimensional simulation of optical coherence tomography images. Sci. Rep. 2019, 9, 12189. [Google Scholar] [CrossRef] [PubMed]
- Kirillin, M.; Meglinski, I.; Kuzmin, V.; Sergeeva, E.; Myllylä, R. Simulation of optical coherence tomography images by Monte Carlo modeling based on polarization vector approach. Opt. Express 2010, 18, 21714–21724. [Google Scholar] [CrossRef] [PubMed]
- Shlivko, I.L.; Kirillin, M.Y.; Donchenko, E.V.; Ellinsky, D.O.; Garanina, O.E.; Neznakhina, M.S.; Agrba, P.D.; Kamensky, V.A. Identification of layers in optical coherence tomography of skin: Comparative analysis of experimental and Monte Carlo simulated images. Ski. Res. Technol. 2015, 21, 419–425. [Google Scholar] [CrossRef] [PubMed]
- Yao, G.; Wang, L.V. Two-dimensional depth-resolved Mueller matrix characterization of biological tissue by optical coherence tomography. Opt. Lett. 1999, 24, 537–539. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Bai, L. Accurate Monte Carlo simulation of frequency-domain optical coherence tomography. Int. J. Numer. Methods Biomed. Eng. 2019, 35, e3177. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Svelto, O. Principles of Lasers, 5th ed.; Springer: Boston, MA, USA, 2010. [Google Scholar]
- Jackson, J.D. Classical Electrodynamics, 3rd ed.; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Elbau, P.; Mindrinos, L.; Veselka, L. Reconstructing the Optical Parameters of a Layered Medium with Optical Coherence Elastography. In Mathematical and Numerical Approaches for Multi-Wave Inverse Problems; Beilina, L., Bergounioux, M., Christofol, M., Da Silva, A., Litman, A., Eds.; Number 328 in Springer Proceedings in Mathematics & Statistics; Springer: Cham, Switzerland, 2020; pp. 105–126. [Google Scholar] [CrossRef]
- Mandel, L.; Wolf, E. Optical Coherence and Quantum Optics; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Hörmander, L. The Analysis of Linear Partial Differential Operators I, 2nd ed.; Springer: New York, NY, USA, 2003. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| central wavelength | 1300 | |
| beam radius at focus | ||
| angle of acceptance | 1.5709 | |
| 0.037 | ||
| , , | , , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Veselka, L.; Krainz, L.; Mindrinos, L.; Drexler, W.; Elbau, P. A Quantitative Model for Optical Coherence Tomography. Sensors 2021, 21, 6864. https://doi.org/10.3390/s21206864
Veselka L, Krainz L, Mindrinos L, Drexler W, Elbau P. A Quantitative Model for Optical Coherence Tomography. Sensors. 2021; 21(20):6864. https://doi.org/10.3390/s21206864
Chicago/Turabian StyleVeselka, Leopold, Lisa Krainz, Leonidas Mindrinos, Wolfgang Drexler, and Peter Elbau. 2021. "A Quantitative Model for Optical Coherence Tomography" Sensors 21, no. 20: 6864. https://doi.org/10.3390/s21206864
APA StyleVeselka, L., Krainz, L., Mindrinos, L., Drexler, W., & Elbau, P. (2021). A Quantitative Model for Optical Coherence Tomography. Sensors, 21(20), 6864. https://doi.org/10.3390/s21206864