1. Introduction
Kinetic data of human motion, such as ground reaction forces (GRFs) and joint torques, serve as a quantitative indicator of sports performance or the effect of rehabilitation. GRFs and joint torques have served as indicators of injury risks and pain during running [
1,
2,
3,
4,
5]. The progress of gait rehabilitation of hemiparetic patients has been monitored by the magnitude and the degree of asymmetry of the GRF [
6,
7,
8]. The motion analysis used for these studies is performed in a laboratory with accurate motion trackers and force transducers, which often impose spatial and temporal constraints on subjects.
With the development of sensor technology, the market for wearable motion monitoring systems has rapidly grown. Wearable motion monitoring products such as Galaxy, Garmin, Fitbit, and Apple watches monitor the overall rough motion information, such as the steps, cadence, distance, etc. That rough motion information, however, makes it difficult to estimate the kinetic information for the analysis of injury risks and rehabilitation. One of the common issues of current wearables is how to increase the quantity and quality of the measured data with minimal increase in the system complexity. In particular, obtaining force information using wearables is very challenging due to the size and weight of the force transducers. Instead of direct measurement, researchers have attempted to predict unmeasured GRF information from joint kinematics information. Oh et al. predicted 3D GRFs based on the whole body motion capture data, but the motion capture system still imposes spatial and temporal constraints on subjects [
9]. To overcome the constraints of the motion capture system, Karatsidis et al. predicted GRFs using inertial measurement units (IMUs) on multiple limb segments, and fairly accurately estimated the 3D GRFs from walking speeds of 0.9 to 1.6 m/s [
9,
10].
The number of IMUs measuring whole body motion, however, greatly limits the applicability of the IMU based prediction method for wearable devices. To reduce the number of IMUs used for GRF prediction, recent studies used the artificial neural network (ANN) with a limited amount of measurement information. Using the ANN, researchers have utilized multi-IMU data located on the shank or foot of both legs to predict the 3D GRFs in walking and running [
11,
12]. Using a single IMU measurement taken at the sacrum, researchers predicted the vertical GRF [
13] or the 3D GRF and used additional sensor information to detect gait events such as heel strike or toe-off [
14]. The ANN could predict unmeasured force information from the IMUs, find the global optima of the loss function during backpropagation [
15,
16,
17,
18], generalize without overfitting [
19,
20], and select appropriate input types and size [
10,
21,
22]. Selecting an appropriate type and size of the data plays a key role in improving training efficiency and test accuracy [
21,
22], and dimension reduction techniques or the employment of large datasets are often used for this purpose [
10,
23]. Oh et al. used self-organizing maps (SOM) and a generic algorithm-general regression neural network (GA-GRNN) to reduce the dimensionality of the input from 90 kinematic data points to 14, to predict 3D GRFs [
10]. Johnson et al. collected kinematic and kinetic data from over 400 subjects, and used eight trajectories of the kinematic marker data, body parameters of mass and height, and gender information as inputs to the network [
23]. Although a sufficiently large input data size may help with the search for appropriate input combinations, the search process often involves optimization and the use of heuristics.
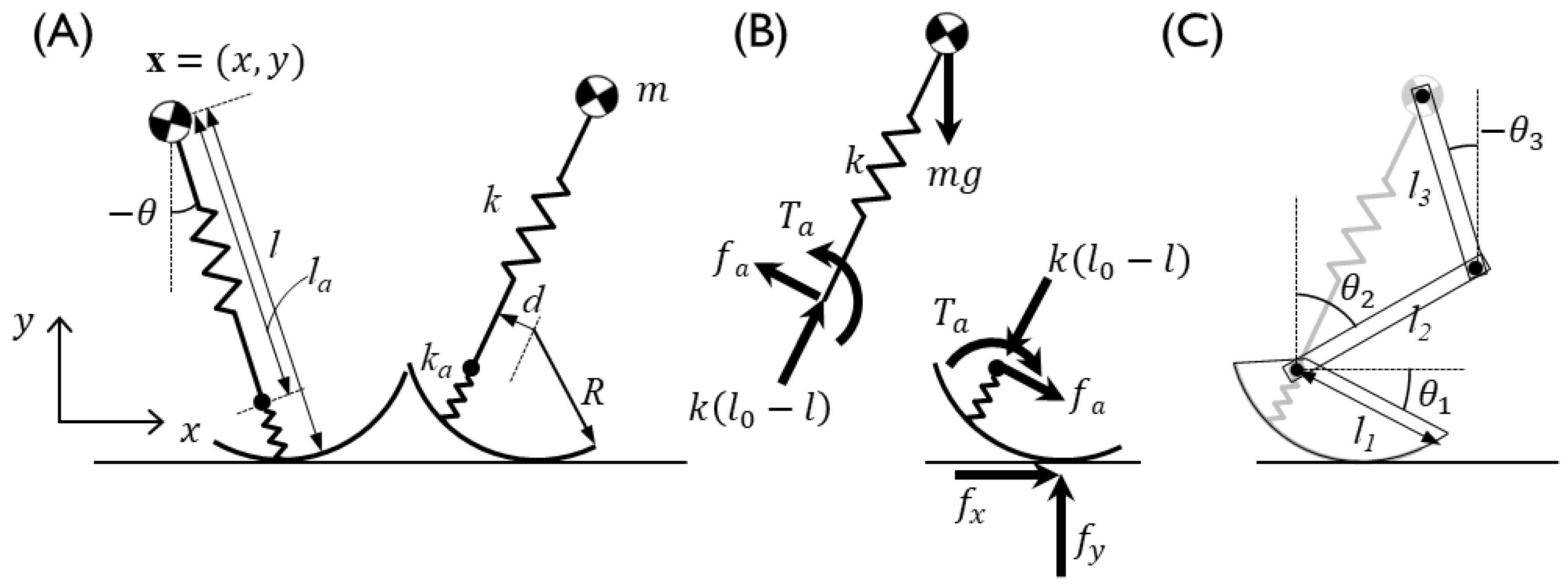
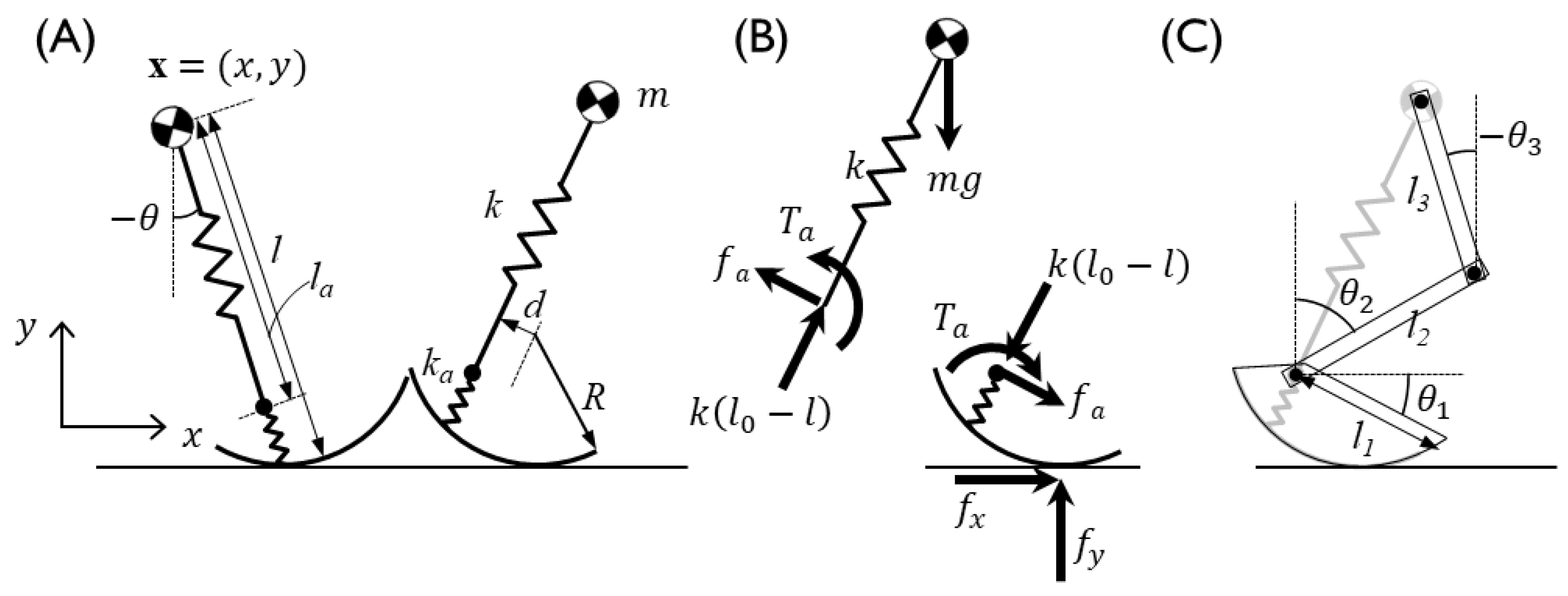
To resolve some issues of the ANN listed above, one may use knowledge of the dynamic characteristics of human walking. Whereas the multiple limbs used during walking are coordinated and actuated in a complicated manner by multiple muscles, the resultant motion of the body CoM and related forces are known to be describable by simple spring mechanics [
24,
25,
26,
27,
28]. The experimental GRFs at various walking conditions are well emulated by the springy mechanics of the CoM [
25,
26], leading to the CoM motion being easily estimated by the GRF, and vice versa. By adding spring components and geometrical constraints to the spring-loaded inverted pendulum (SLIP) model, recent studies have shown the extended dynamic association of the CoM with the ankle joint torque and multiple joint kinetics [
29], as well as swing leg kinetics [
30]. These findings highlight the importance of the CoM as a dynamic determinant of multi-segment kinetics during gait. Noting that the ANN generates the output from the weighted sum of the inputs, the mechanical coupling between the CoM and the joint kinetics could be implemented in the ANN to efficiently and accurately predict the unmeasured joint kinetics.
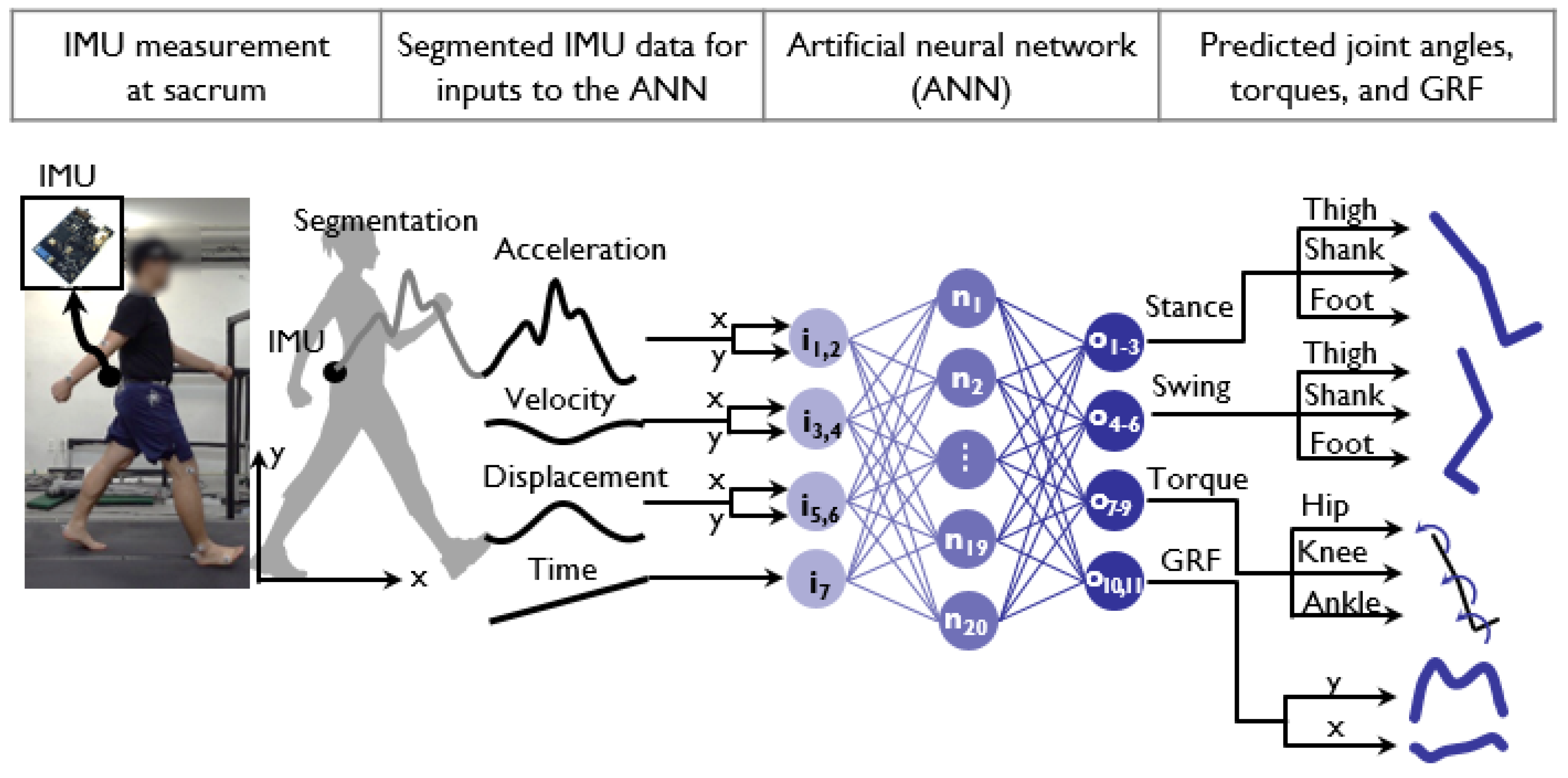
In this study, using the dynamic relationship between the CoM, GRFs, and joint kinetics, we propose the CoM as a single measurement location which can be used to predict unmeasured dynamic data of the lower limbs using an ANN. Data from seven subjects walking on a treadmill at various speeds were collected from a single IMU worn near the sacrum. The data was segmented by step and numerically processed for integration. After training the ANN with the processed IMU data, lower limb kinematics and kinetics at various gait speeds were predicted and tested by the leave-one-subject-out (LOO) validation method.
3. Results
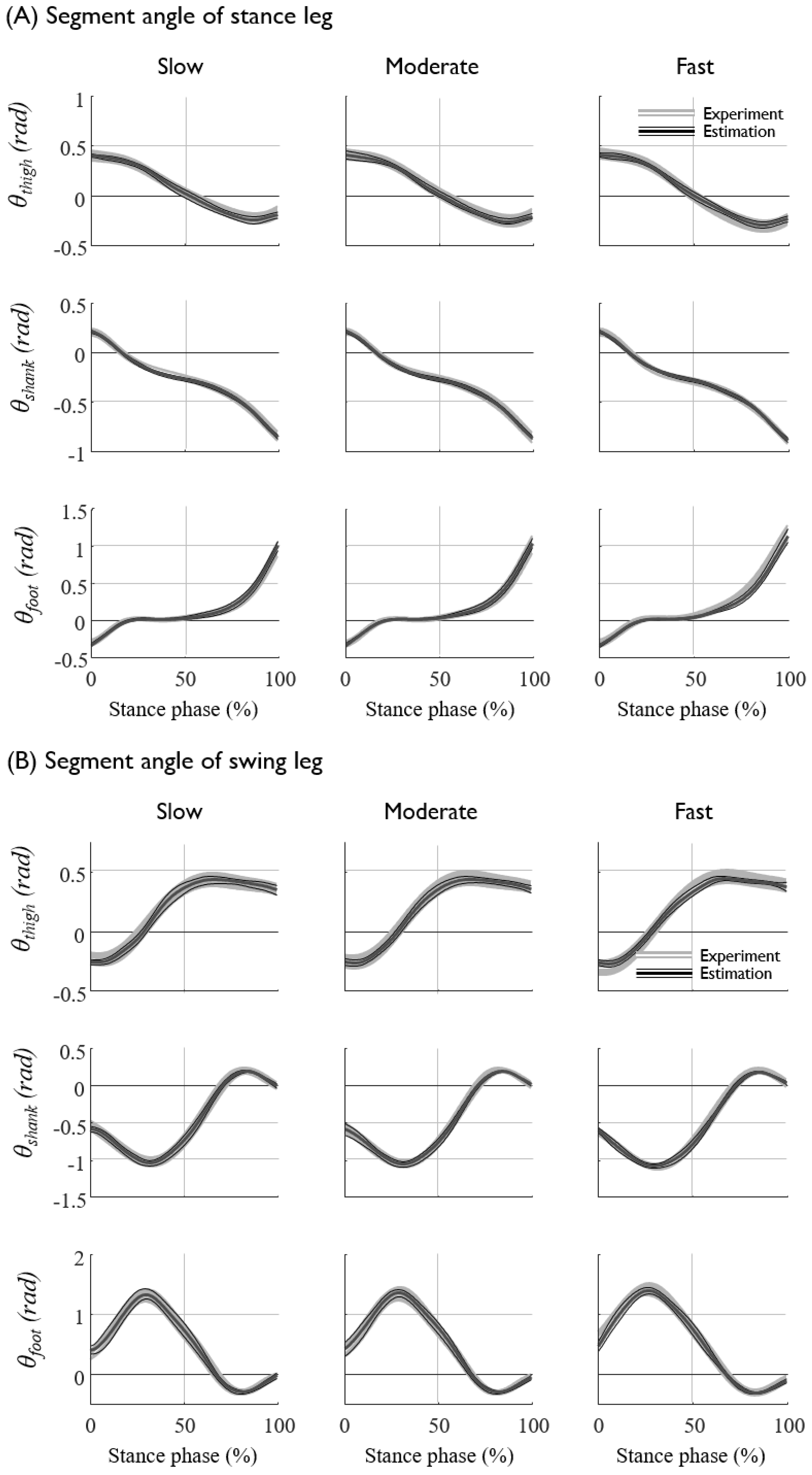
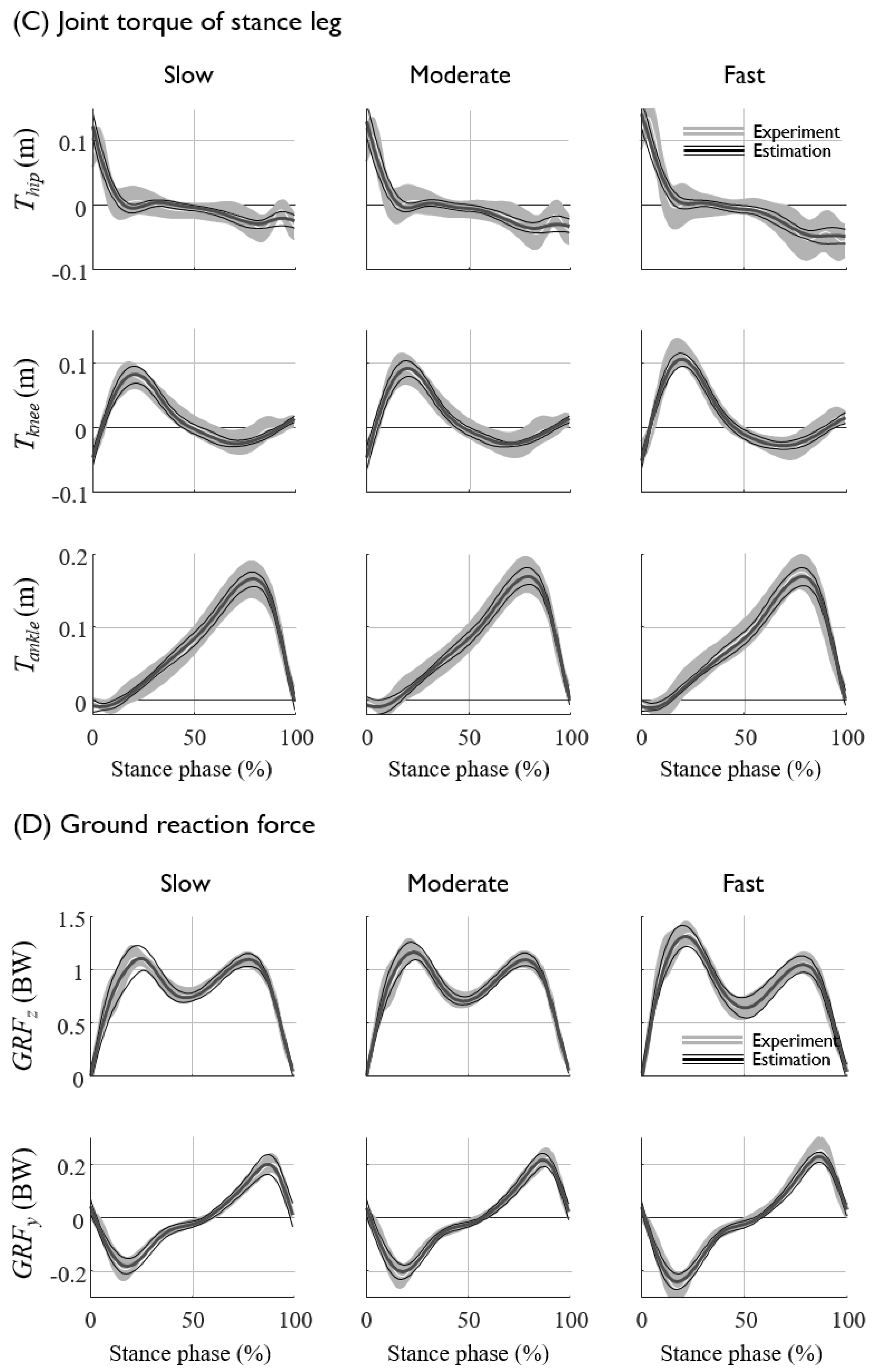
From the single IMU measurement at the lower back, the practical approximate of the CoM, eleven joint kinetics data points were predicted by the ANN over walking speeds ranging from 1.0 to 2.3 m/s. The predicted joint data are the thigh, shank and foot angles of the swing and stance leg, the hip, knee, and ankle joint torques of the stance leg, and the vertical and A–P ground reaction forces.
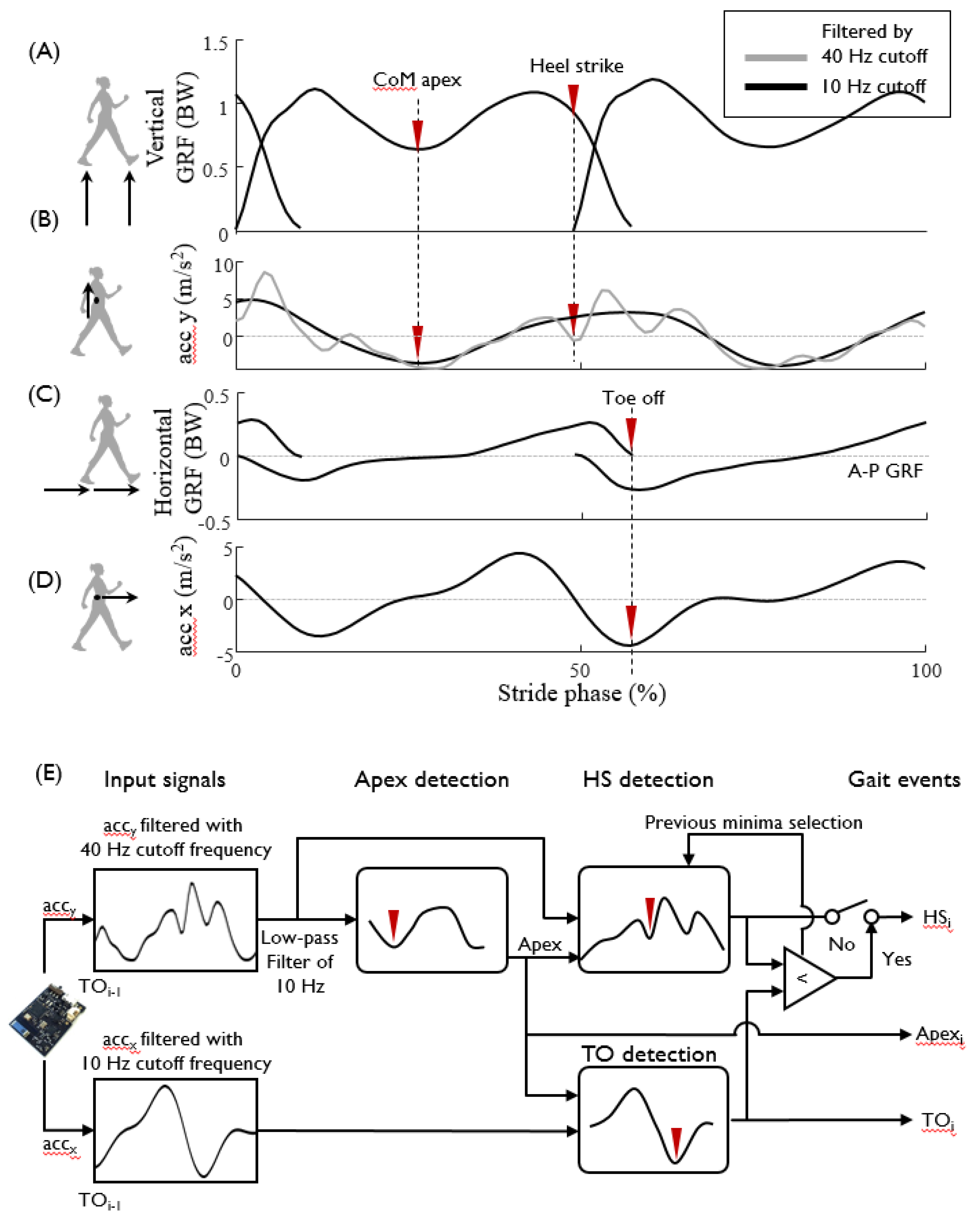
Gait event detection from the IMU data showed a reasonable match with those defined from the GRF, with average detection errors of the HS and TO of 0.025 s and 0.014 s, respectively (
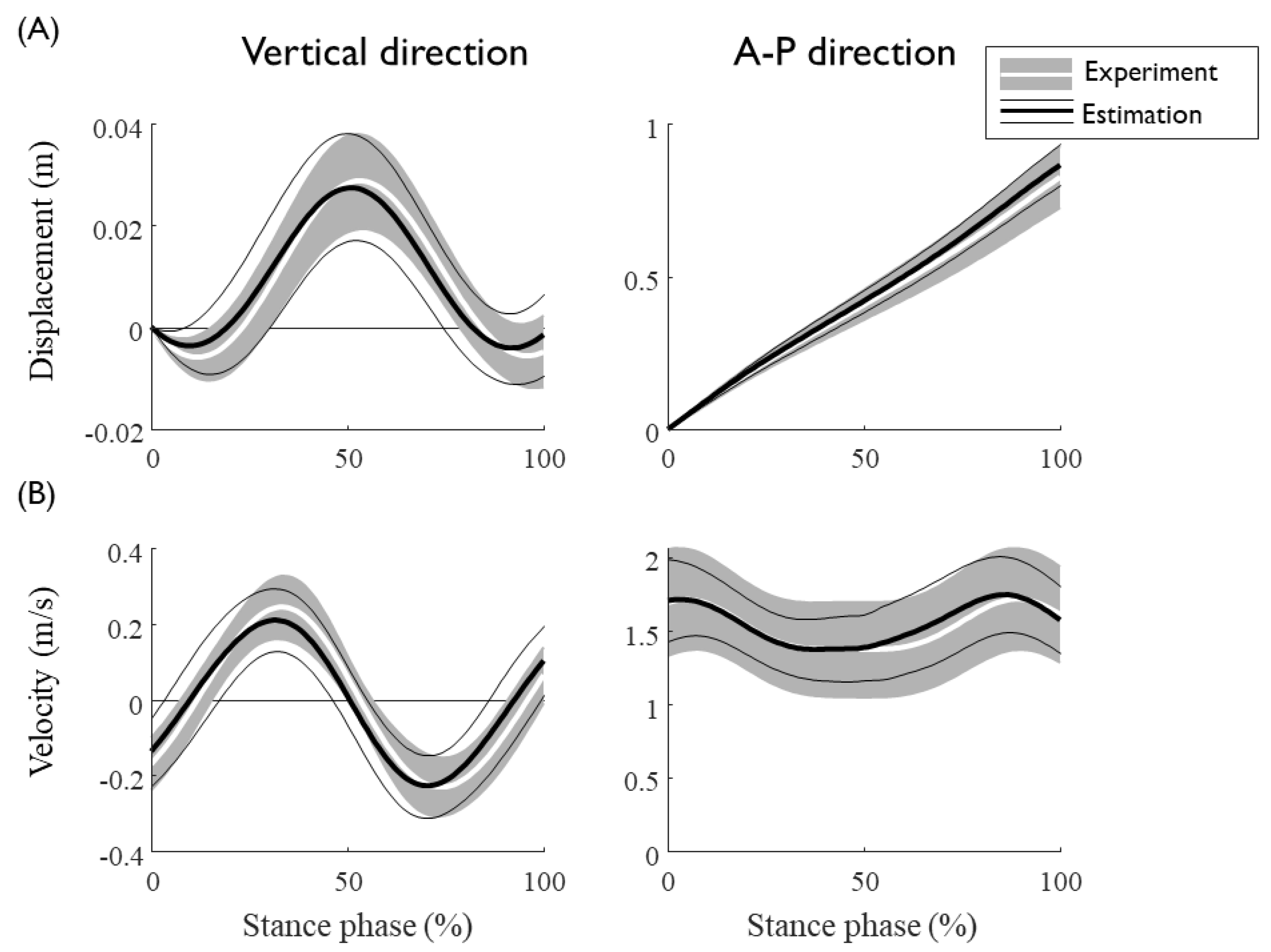
Table 2). The detection algorithm showed a more accurate performance for TO than that for HS, with the accuracy increasing with the gait speed. With drift removal and the estimation of the integral constant of the IMU measured acceleration, the velocity and displacement trajectories of the CoM were obtained by integrating the IMU data based on the detected gait events (
Figure 4). The calculated sacrum speed and the displacement segmented by the stance phase matched well with the data obtained from optical markers, with NRMSEs of approximately 25% and 12%, respectively (
Table 3). No significant tendencies were observed for the estimation errors of the sacrum kinematics as a function of the gait speed.
The prediction results (NRMSE and
) of each subjects are presented in
Table A1 and
Table A2 in the
Appendix A. The lower-limb joint kinematics and kinetics at various gait speeds for all seven subjects were fairly well predicted from the kinematics of the sacrum, such as the displacement, velocity, and acceleration, with an average NRMSE of approximately 7% (
Figure 5 and
Figure 6,
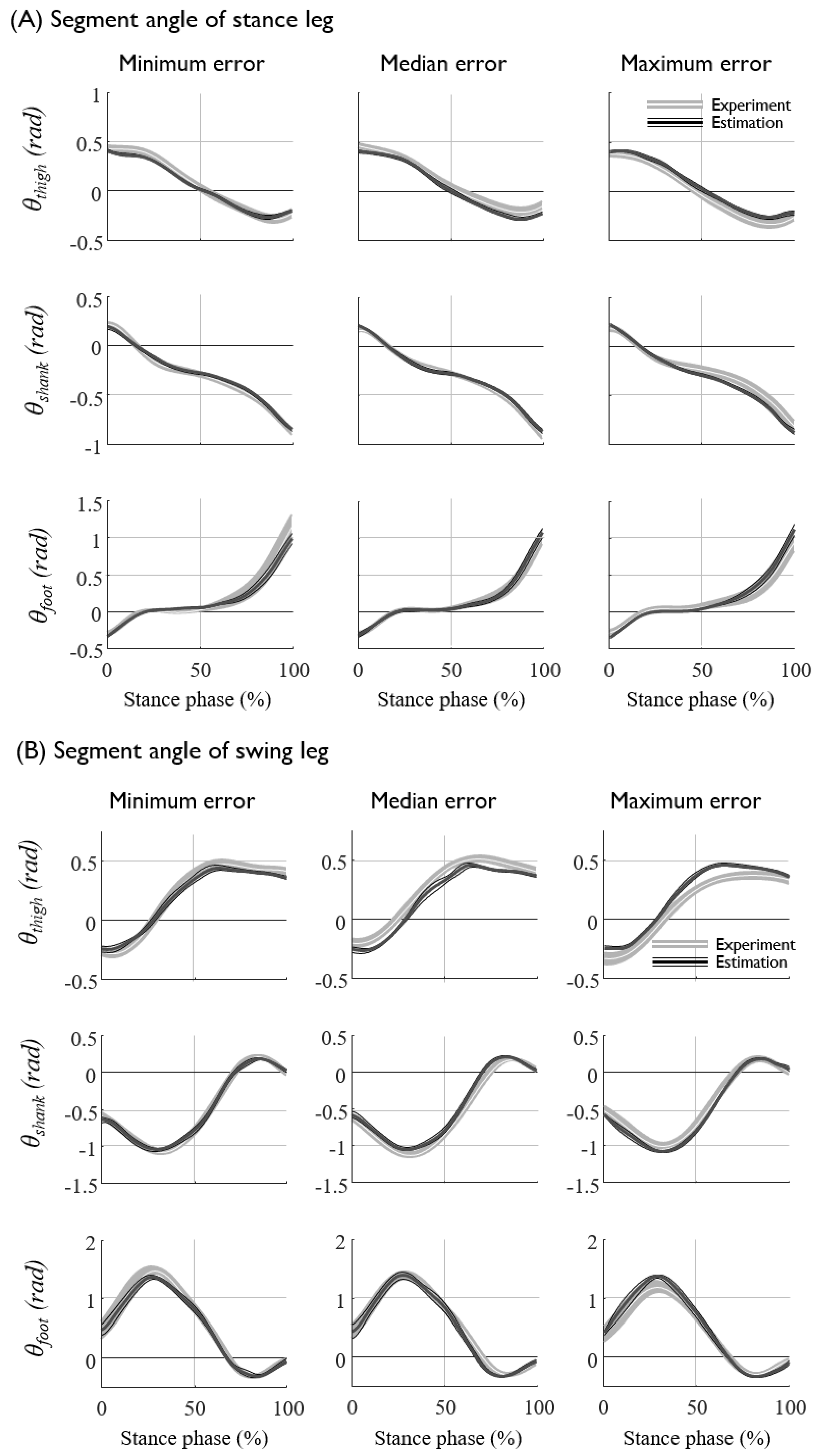
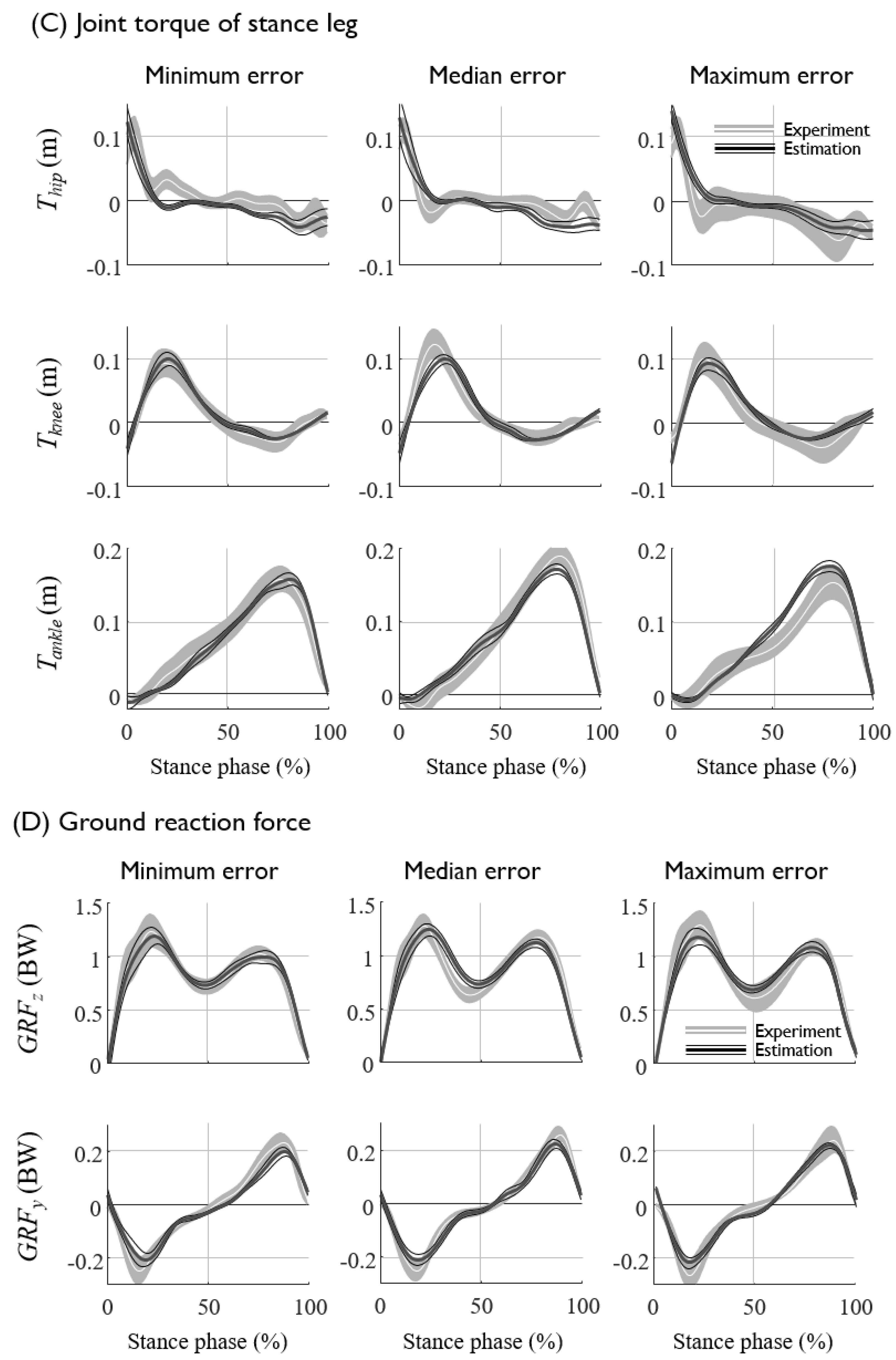
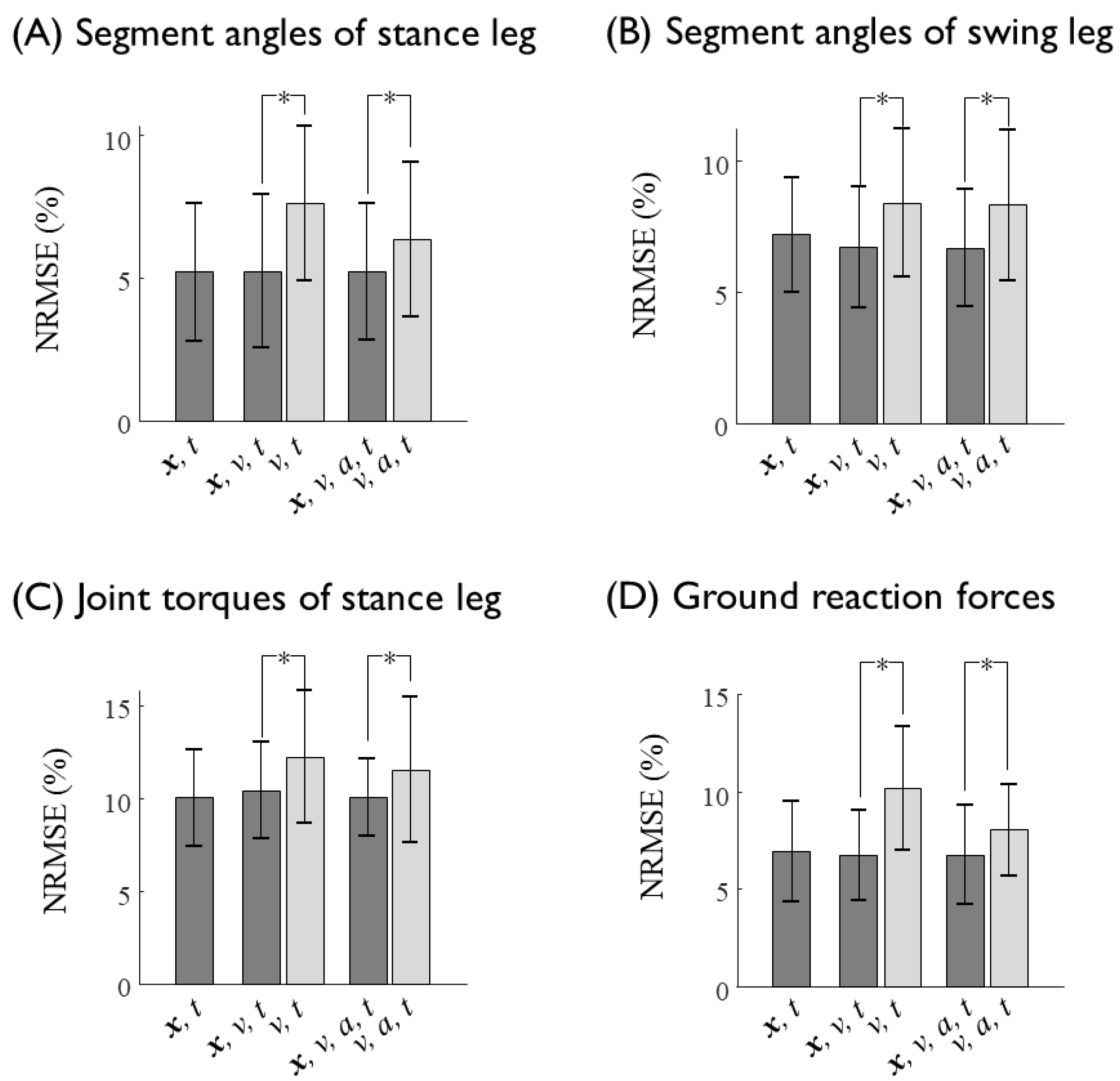
Table 4). The segment angles of the stance and swing leg showed a reasonably good match between the prediction and experimental data, even for the worst case test set (
Figure 6A,B,
Table 5), whereas the joint torques and GRFs showed larger error, especially for the estimation of the high-frequency component of the hip joint torques (
Figure 6C,D,
Table 5). The average prediction errors also showed a similar trend in the prediction accuracy (
Figure 5,
Table 4). As long as the displacement information of the sacrum is provided, the velocity and acceleration input to the ANN do not significantly improve the prediction accuracy, whereas the omission of the displacement input significantly (
p < 0.05) increases the prediction errors of the segment angles, torques and GRFs up to 3% (
Figure 7,
Table 6). These results imply that the position of the sacrum contributes most to the predictions of the lower-limb joint kinetics.
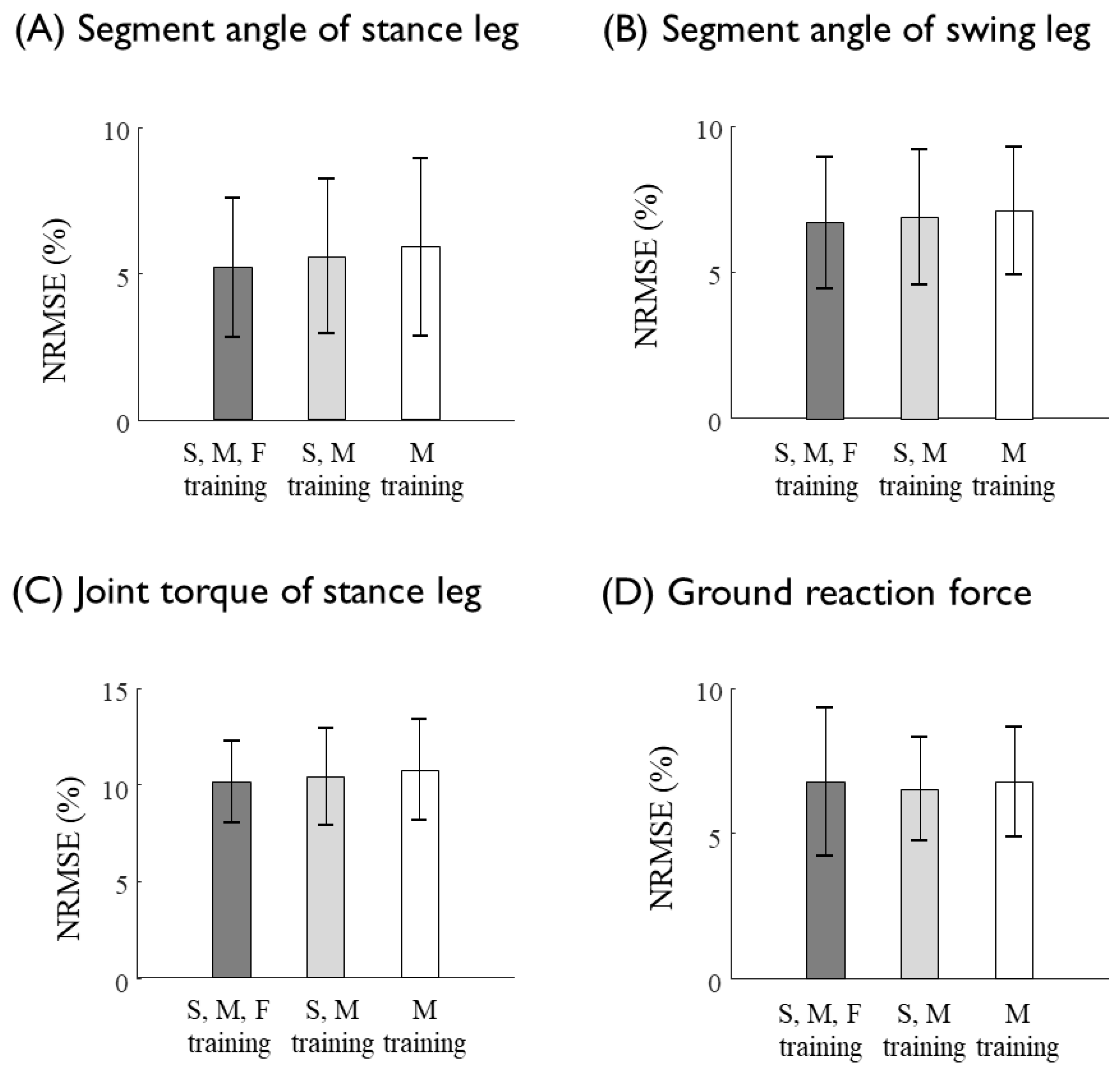
The ANN predicted the kinematics and kinetics of the lower limb at various gait speeds that were not used for the training datasets. The joint kinematics and kinetics are known to vary as a function of the walking speed. To examine the effect of the walking speed at which the training data sets are collected to the prediction accuracy, the ANN was trained by the data collected at three different speed conditions: at moderate speed only, at slow and moderate speeds, and at slow, moderate and fast speeds (
Figure 8). The results showed that the inclusion of the data of a specific gait speed, which are to be predicted through the ANN, would slightly but not significantly increase the prediction performance. More importantly, the sacrum kinematics measured at the moderate speed could predict the eleven unmeasured joint kinetics at various walking speeds, which were not included in the training of the ANN (
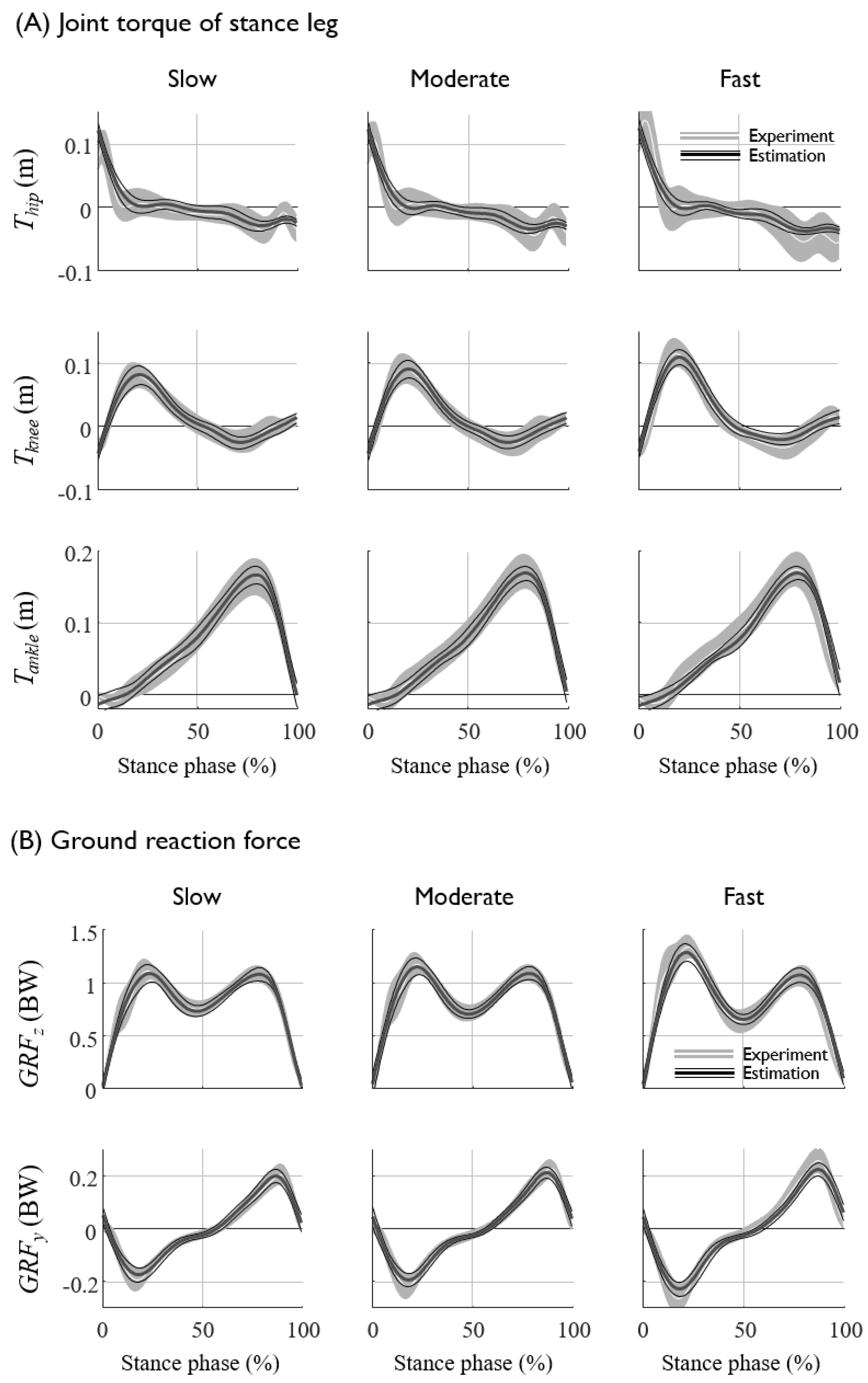
Figure 8). The prediction results of the joint torques and GRFs at the various gait speeds obtained from the ANN trained by trials of moderate speed showed a reasonable match with the data (
Figure 9,
Table 7).
4. Discussion
Biomechanical knowledge about walking dynamics was used to design an ANN to predict unmeasured motion data from a single IMU measurement. Equations related to CoM dynamics were reformulated to approximate the GRF and lower limb joint dynamics as the weighted sum of the CoM, the basic input–output relationship of the ANN. Based on this approximation, the ANN was designed to have input nodes receiving the kinematics of the CoM, with the layers being fully connected. Using this ANN, eleven lower limb joint dynamics and the GRF data at various walking speeds were predicted from a single and only IMU measurement near the sacrum. The predicted segment angles, joint torques, and GRF data showed a reasonably good match with the experimental data despite the very simple network structure (
Figure 1) with a relatively small number of training data sets (
Figure 5,
Figure 6,
Figure 7 and
Figure 8). Although trained with the CoM data measured at a specific gait speed, the ANN could predict multiple joint kinetics at various gait speeds that have not been used for network training. These results imply that the CoM is important as a dynamic determinant of multi-segment kinetics during walking, and that the tradeoff between data quantity and wearable convenience can be solved by utilizing a machine learning algorithm based on the dynamic characteristics of human walking.
Based on a biomechanical analysis using 2D spring mechanics, we showed that the 2D acceleration data of the CoM could predict the GRFs and joint dynamics in 2D fairly well. Due to the point mass assumption of the CoM, no rotational motion of the CoM was assumed, and no gyroscope data were used for prediction. We may improve the quality of the prediction heuristically with the full usage of IMU sensors, such as 3D accelerations and 3D angular rates from the gyroscope. We do not, however, have sound explanations as to why the addition of 3D data would help in obtaining better prediction. We are investigating whether the 3D GRF could be well formulated using 3D CoM kinematics as a form of simple mechanics, as was the case for 2D. Despite the lack of quantitative formulation, there is considerable experimental evidence to show that full usage of the IMU data could predict the unmeasured GRFs, metabolic cost, and joint angles [
9,
33,
34]. Three dimensional acceleration and angular rate measured from the 17 IMUs attached to the whole body have been used to successfully predict 3D GRF data [
9]. Similar to our study, the 2D joint angles of lower limbs have been estimated from IMU measurement at the foot, shank, and thigh [
34]. The 3D acceleration and gyroscope data were processed using general regression neural networks and the authors found that foot acceleration was sufficient to predict the other joint angles. Despite the larger number of sensors, the prediction errors were slightly larger (4~9 degrees) than ours (2~3 degrees), implying that the CoM kinematics are closely related to lower limb kinematics. The predicted quantities were not limited to the GRF or joint kinematics. Metabolic cost is one of the key determinants for human motion [
35,
36,
37,
38]. Measurements of energy expenditure, however, are limited to indoor settings, and the measurement procedures are often tedious. Researchers attempted to estimate the metabolic cost during walking from IMU data measured at the hip joint using Bayesian linear regression [
33]. With the support of quantitative biomechanical analysis of the target motion to be predicted, the IMU data could be used more effectively and efficiently. There are studies that use machine learning technology to predict human motion, independent of gait biomechanics, but often with the cost of increased measurement complexity of the prediction errors. Oh et al. successfully predicted the joint torques and GRFs of human walking using a general regression neural network (GRNN), with the cost of increased measurement of the whole body joint kinematics using an optical marker system [
10], which is therefore limited for on-field applications. The errors of the vertical and A–P GRF were comparable to ours (
Table 8). Recently, without a great loss of prediction accuracy, the number of IMUs were reduced to two, attached at each shank of the subject [
11]. To complement the reduced sensor information, a feed-forward neural network was used to produce the best estimate of the GRFs. In this recent study, however, the training datasets included part of the data from the test subject [
11], which may have decreased the prediction accuracy when LOO validation was performed. Because the GRF pattern could differ between subjects [
39,
40], we used a conservative validation method, by excluding the test subjects’ data from the training dataset, and following the LOO validation method to guarantee generalization.
Machine learning techniques have been used to estimate joint angles and joint torques (
Table 9) [
34]. Luu et al. used GRNN and inverse fast Fourier transforms [
41]. The predicted joint angles of lower limbs showed relatively small errors, in the range of 3~5 degrees, compared to others, but the test data were included in the training data set, which would produce less-accurate predictions when LOO validation is performed. Joint torque predictions have been performed using joint angle data [
42] as well as surface electromyography (sEMG) [
43]. The errors of the joint torque predictions were larger than those of GRFs and/or joint angles, as was observed in our study (
Table 10). Ardestani et al. used 14 sEMG data and showed relatively high accuracy in joint torque prediction [
43], but, again, the inclusion of test data in the training dataset of the four subjects may contribute to a misleadingly high prediction accuracy. Compared to those of related works, we predicted more data at various walking speeds with fewer measurements from the complementary combination of the biomechanics and the ANN.
The proposed prediction method using a combination of biomechanics and machine learning could be used to resolve the tradeoff between data richness and measurement convenience inherent in wearable technologies. The rehabilitation success of stroke patients can be assessed using the A–P direction of the GRF of the nonparametric leg [
6,
7,
8], which would be challenging to measure if patients have to regularly visit a motion analysis laboratory and undergo almost over an hour of data collection procedures. Motion monitoring of those patients using simple wearables during their clinical visits or even at home in daily life would greatly increase patients’ convenience, if the data from wearables could produce data of quality and quantity comparable to those obtained in the lab. A recent study demonstrated successful long-term monitoring of the range of motion (ROM) of the shoulders of elderly people using the IMU, which showed a fairly good match with data from optical motion capture systems [
44]. Similarly, onsite monitoring of lower limb joint loading could be estimated from a single IMU sensor for patients with rheumatoid arthritis or anterior cruciate ligament recovery. As a quantitative comparison, the asymmetry of the GRFs of mild hemiparesis patients seemed to be approximated as 50 N [
7]. Kesar et al. proposed minimal detectable changes of the kinematic and kinetic indicators of rehabilitation assessment of post-stroke patients to be about 3–10 degrees and 20–33 N, respectively [
45]. In our study, the average prediction errors of segment angles are about (3.1 degree) thigh, (2.2 degree) shank and (3.4 degree) foot, respectively. The approximate errors of vertical and AP GRF are 58 N and 23 N, and those of hip, knee, ankle joint torques are 16.7 Nm, 11.4 Nm, and 15.3 Nm, respectively. Considering the observed changes of GRFs and joint kinematics of stroke patients, the proposed method could serve well for kinematics monitoring, whereas the GRF monitoring seemed to be feasible for A–P GRF but need improvement for vertical GRF. In addition to the rehabilitation research, the number of studies monitoring sports activity is rapidly increasing. Wearable monitoring systems are widely used for monitoring the effect of posture or loading conditions on kinetics [
46]. Data from sacrum-mounted IMUs were used to analyze the effect of load carriage and fatigue on jumping motions. The change of kinematics due to fatigue was similar to that under load conditions. IMUs on the lower body were used to estimate joint kinematics and GRF during running [
47,
48]. Combining single IMU data from the sacrum with a convolutional neural network, Johnson et al. estimated 3D GRF with the error of 4–9% during running and side-stepping [
14]. A leg-mounted IMU combined with a feed forward neural network predicted knee joint forces with an error rate of 17% during running, changing direction, and jumping [
49]. Issues to be addressed for sports wearables include reducing the number of sensors and enhancing prediction accuracy. The difference in kinetics with different foot strike patterns in running is about 10%–20% of joint torque and 30% of GRF. [
50]. A recent study showed that a magnitude of about 30% of GRF in response to the breaking force could serve as an indicator for injury risk [
51]. By assuming reference force and length to be the average weight and height of our test subjects, the observed kinetic differences range approximately 200 N and 18 Nm, respectively. Considering the error range of our study, the proposed prediction method can be applicable for monitoring running.
The limitations of our study, and technical issues to be resolved, lie in the main components of the prediction method, such as the biomechanical model, the processing of the IMU data, and the design of the ANN. First, the proposed prediction method utilized a spring-based biomechanical model of CoM dynamics during steady gait trials in 2D. Pathological gaits, however, often show increased asymmetry in the medial–lateral (M–L) as well as the A–P direction [
52]. Thus, further research is required into applying the proposed method to the monitoring of unsteady or abnormal walking in 3D. Biomechanical modeling of human walking with a passive spring and asymmetric foot could well emulate the human-like ankle joint torque [
29], implying that the CoM and ankle joint torque are mechanically coupled. The biomechanical model of the point mass CoM, however, could not represent the activation of hip joint torques, so there is no mechanical and kinematical correlation between the CoM motion and the hip joint torques. Since the ANN used for joint torque prediction was designed based on the biomechanics of the CoM, the larger prediction errors in hip joint torque presented in
Figure 9A could be attributed to the limited representability of the hip joint torque by the CoM. Secondly, one of technical challenges of handling IMU data is the determination of appropriate and accurate segmentation. For long-term IMU data from motion monitoring, the very first step to perform in signal processing is to extract meaningful data from a whole data collection. A recent study used GPS information to specify the data segment of the action of interest out of approximately two weeks of IMU data in daily life [
24]. To expand the proposed prediction method to gait monitoring during daily life, an appropriate activity recognition and extraction process must be undertaken. Once the data were roughly segmented for a specific action, such as walking in the hallway, further segmentation was carried out based on specific gait events, such as HS or TO. IMU data gathered near a ground contact such as the shank or foot had more accurate event detection results than when the IMU was mounted near the sacrum or lower back [
53,
54] possibly due to the distal measurement of the indicating signal around the foot [
54,
55,
56]. Similar to previous studies, the identification of gait events and segmentation of the data were performed in a heuristic manner, but in a simpler way than those presented in other studies, such as those using wavelet transforms [
57]. For example, the filtering frequency of the IMU data was selected heuristically by choosing the one that did not smooth the indicating signal of the gait event, while not including unnecessary peaks. The proposed event detection method produced errors comparable to those of previous studies, ranging from approximately 0.01–0.03 seconds [
53,
54]. The detection errors were reduced with gait speed due to the highlighted singular motion of the sacrum at faster speeds [
28]. The gait event detection mostly follows the real gait event due to the delayed sacrum acceleration profile compared to that of the true CoM acceleration, which is obtained from the GRF, and resulted in shifted estimation of sacrum trajectory. Likewise, although small in magnitude, event detection errors could greatly affect the prediction results when erroneously segmented IMU data are used for training an ANN. An ANN is highly dependent on its input information, so poorly-estimated sacrum kinematics cause a deterioration in prediction accuracy. Thus, the prediction performance is sensitively dependent on the signal quality of the IMU and the following signal processing. Considering that supervised learning is performed between the segmented IMU data and the segmented GRF, erroneously segmented IMU data distort the coupling relationship between the CoM and the GRF, and the network will be trained inaccurately and inefficiently. Further, there was a relatively large error (~25%) in the velocity estimation (
Figure 4). The integration of the acceleration had drift removal and offset compensation issues, which were resolved in a heuristic manner. Thorough examination of the best estimation of the gait speed was not performed in this study, so the error rate could potentially be reduced by employing other estimation algorithms or machine learning techniques. The effects of erroneous velocity estimation on the prediction results, however, are reduced when the velocity is fed into the ANN after normalization. In addition, the validation conducted depends on the location of IMU. Since the trunk has rotational motion with respect to the vertical axis, the location of IMU in the horizontal axis can affect the prediction performance. Thus, the sensitivity analysis about the location of IMU should be performed for validation of the reliable wearable motion monitoring system. Lastly, the proposed ANN has much room for improvement of the prediction accuracy. The proposed ANN is a very simple network, designed using a simplified mathematical approximation between the GRFs and the CoM. A more realistic approximation could be achieved by adding complexity to the network, such as additional input nodes or hidden layers, or a change of activation function. A relatively small number of training datasets, and reasonably good test results compared to previous studies with more sensor data could support an efficiently trained ANN. However, a small training data set could result in the limited performance accuracy of the network, which was observed by an increase error in response to variations of the input. Since the GRF data are known to have high intra-subject variability, training with a larger dataset should produce improved prediction results for diverse test subjects.
Biomechanical knowledge about walking dynamics was used to design the ANN that predicts the unmeasured motion data from only a single IMU measurement. From the sacrum-mounted IMU data, the motion and force information of multiple joints were well predicted at various gait speeds by a simple ANN with a relatively small number of training datasets. This is attributed to the role of the CoM as a key dynamic descriptor of multi-segment lower limb coordination during the human walking behavior. The reliable prediction performance presented in this study implies the complementary roles of biomechanics domain knowledge and machine learning technology in predicting motion kinetics.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










