Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems †


Abstract
:1. Introduction
2. Related Works
2.1. Computation Offloading
2.2. Tracking an Active Object with a PTZ Camera
3. Mobility-Aware Dynamic Computation Offloading Decision Scheme
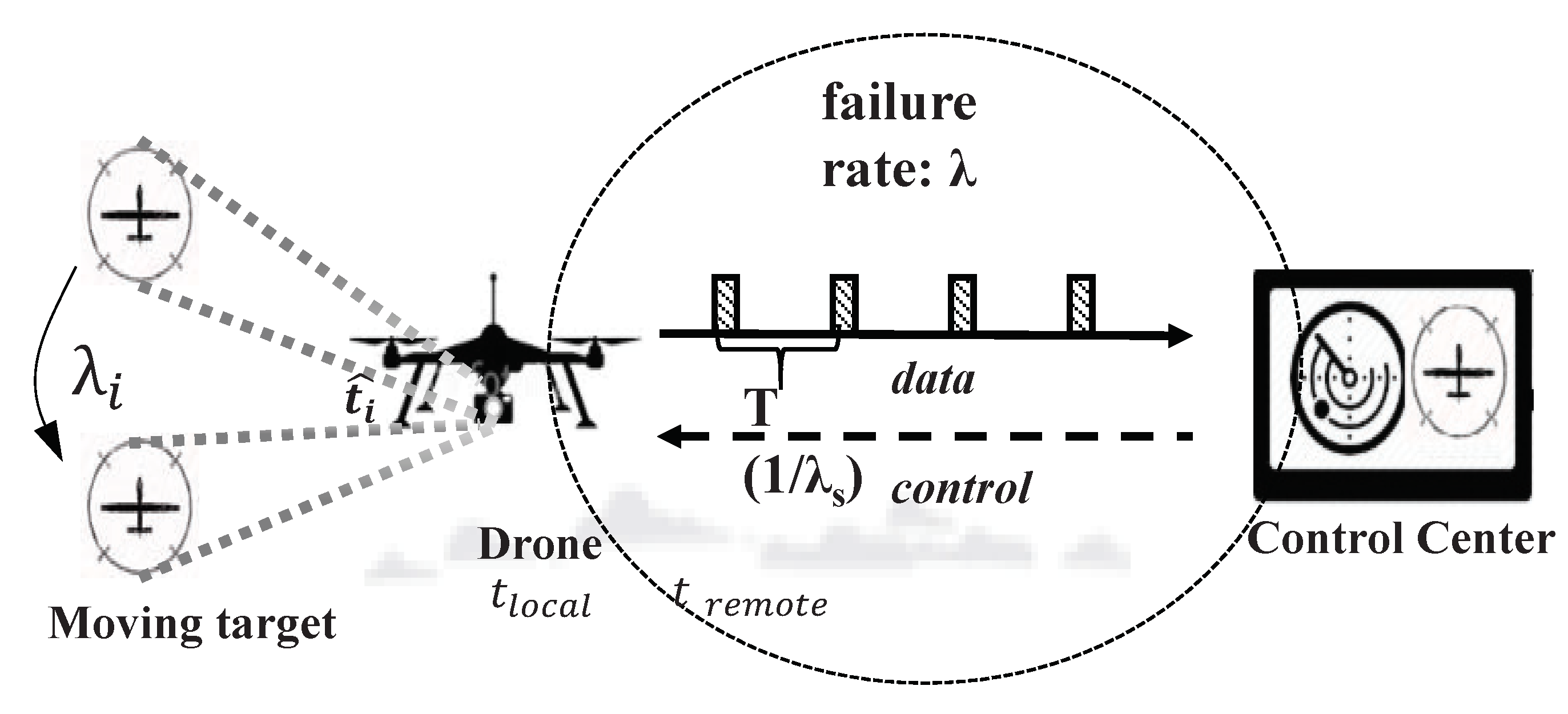
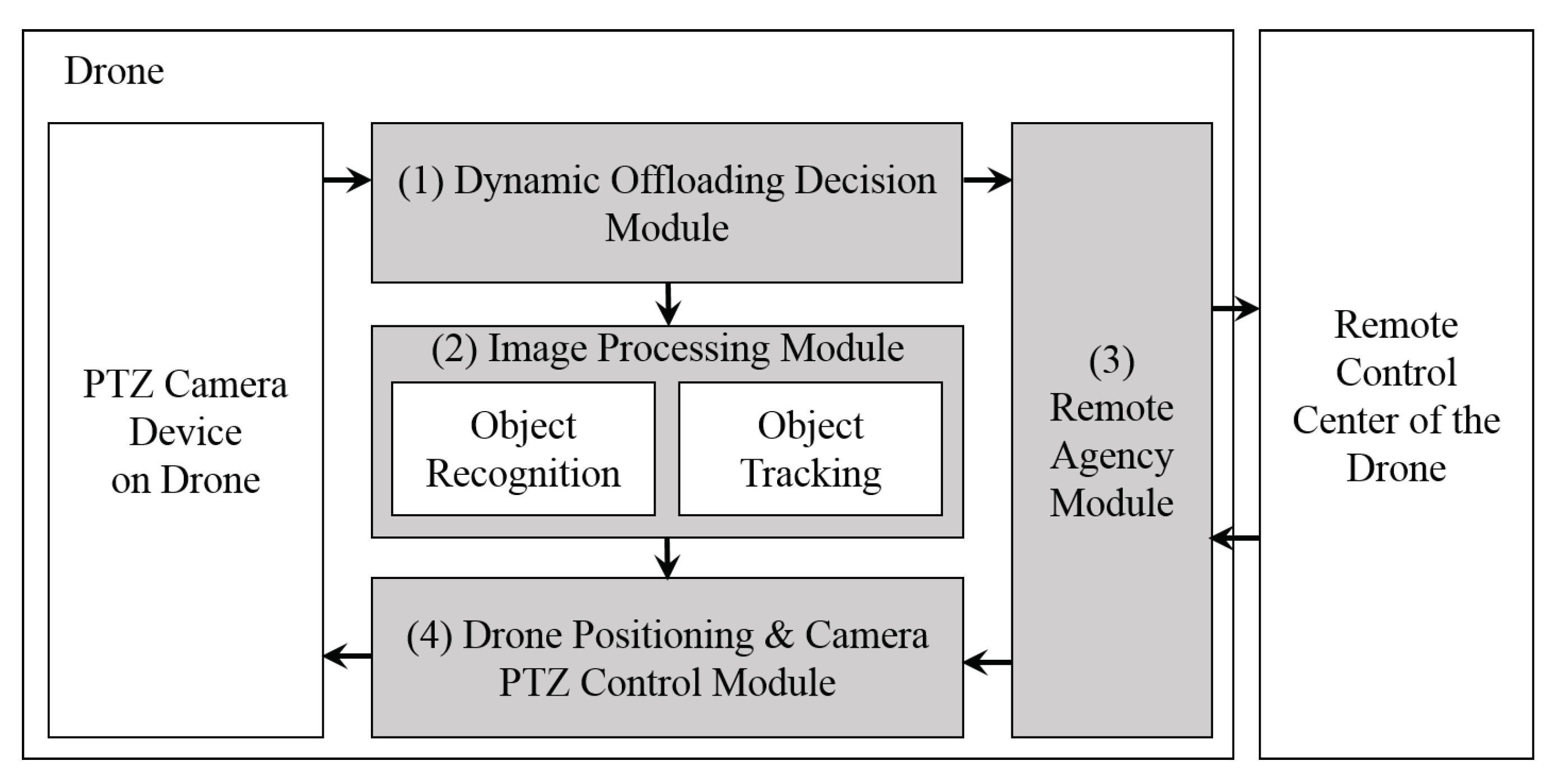
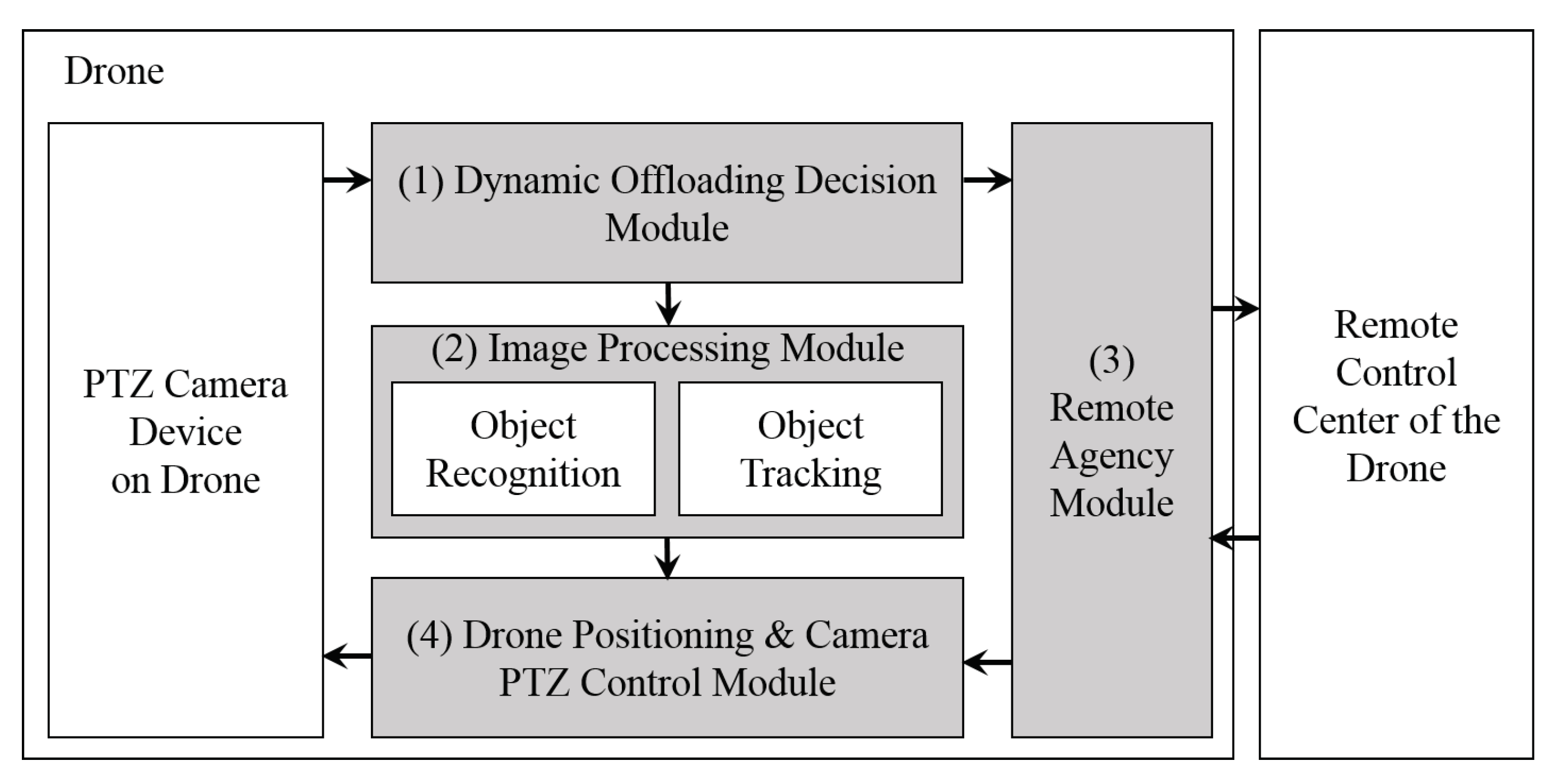
3.1. Drone Computation Offloading Model for Tracking and Recognizing Moving Objects
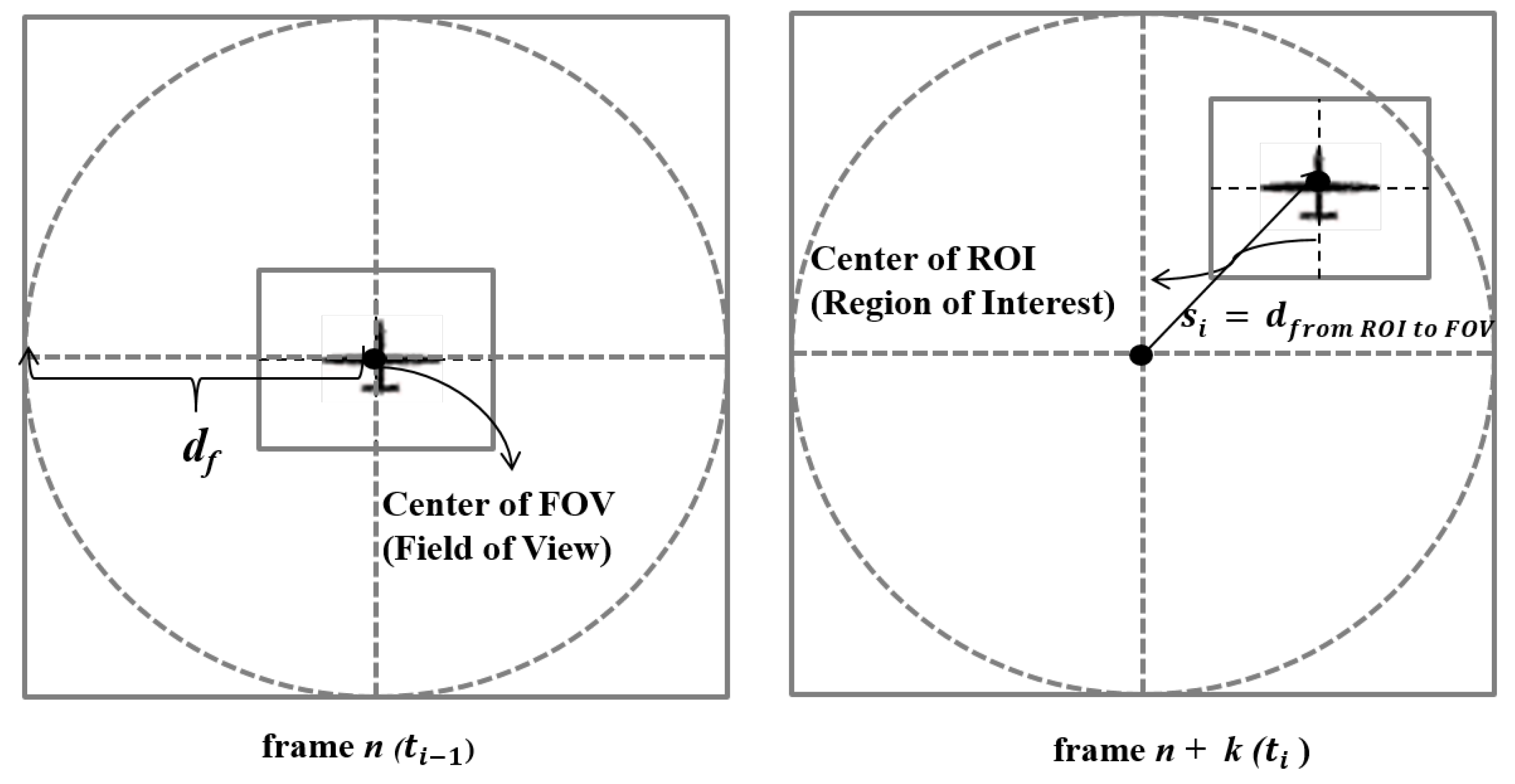
3.2. Dynamic Computation Offloading Decision Considering the Mobility of a Moving Target Object
3.3. Considering Network Delays in Decision Making
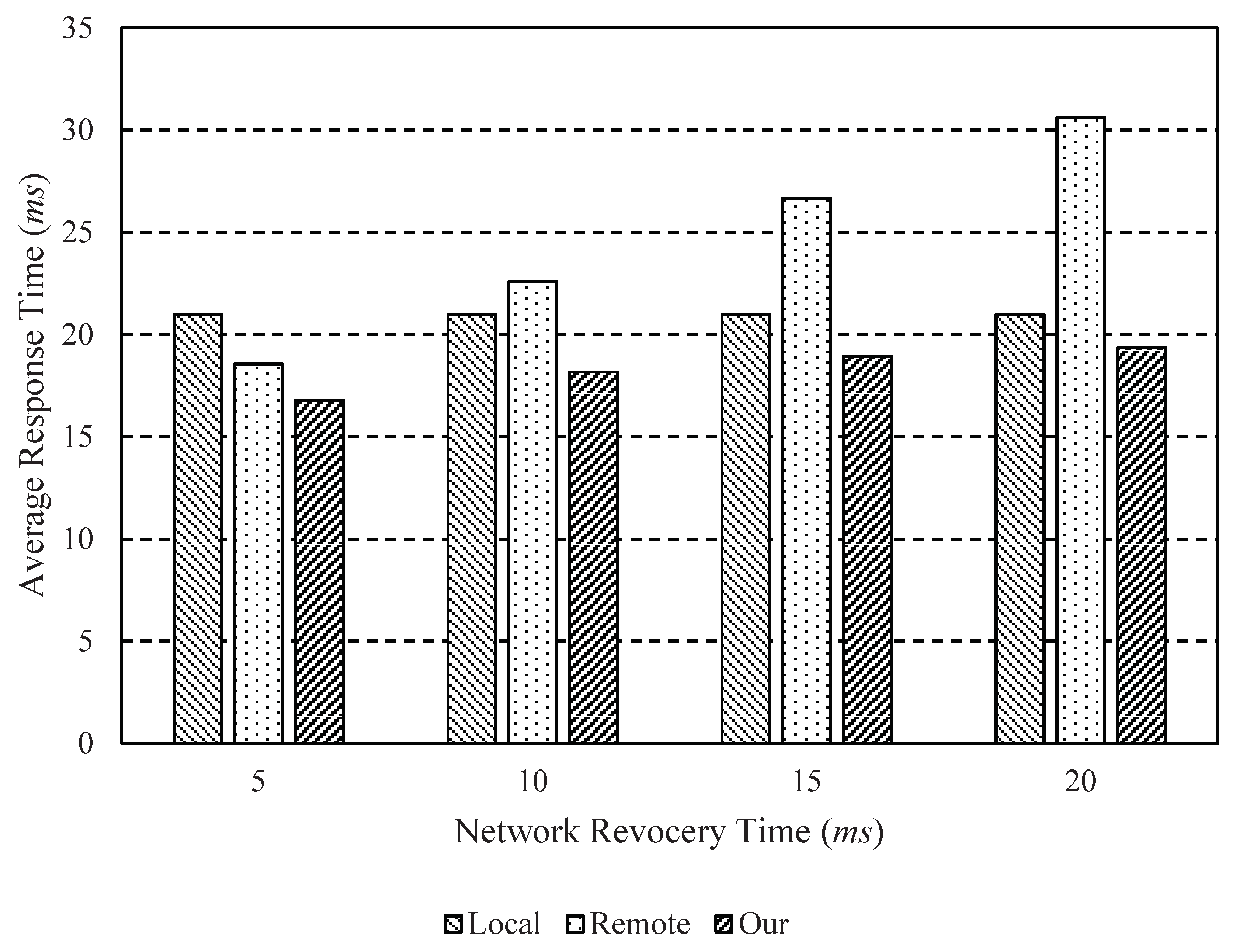
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, T.Y.; Ravindranath, L.S.; Deng, S.; Bahl, P.V.; Balakrishnan, H. Glimpse: Continuous, Real-Time Object Recognition on Mobile Devices. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems (SenSys), Seoul, Korea, 1–4 November 2015; pp. 155–168. [Google Scholar]
- Kumar, N.; Lee, J.H.; Rodrigues, J.J.P.C. Intelligent Mobile Video Surveillance System as a Bayesian Coalition Game in Vehicular Sensor Networks: Learning Automata Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1148–1161. [Google Scholar] [CrossRef]
- Nimmagadda, Y.; Kumar, K.; Lu, Y.H.; Lee, C.G. Real-time moving object recognition and tracking using computation offloading. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 2449–2455. [Google Scholar]
- Toma, A.; Chen, J.J. Server resource reservations for computation offloading in real-time embedded systems. In Proceedings of the 11th IEEE Symposium on Embedded Systems for Real-time Multimedia, Montreal, QC, Canada, 3–4 October 2013; pp. 31–39. [Google Scholar]
- Kim, B.; Min, H.; Heo, J.; Jung, J. Dynamic Offloading Algorithm for Drone Computation. In Proceedings of the International Conference on Research in Adaptive and Convergent Systems (RACS’16), Odense, Denmark, 11–14 October 2016; ACM: New York, NY, USA, 2016; pp. 123–124. [Google Scholar] [CrossRef]
- Kumar, K.; Liu, J.; Lu, Y.; Bhargava, B. A Survey of Computation Offloading for Mobile Systems. Mob. Netw. Appl. 2013, 18, 129–140. [Google Scholar] [CrossRef]
- Soyata, T.; Muraleedharan, R.; Funai, C.; Kwon, M.; Heinzelman, W. Cloud-Vision: Real-time face recognition using a mobile-cloudlet-cloud acceleration architecture. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 59–66. [Google Scholar]
- Park, U.; Choi, H.C.; Jain, A.K.; Lee, S.W. Face Tracking and Recognition at a Distance: A Coaxial and Concentric PTZ Camera System. IEEE Trans. Inf. Forensics Secur. 2013, 8, 1665–1677. [Google Scholar] [CrossRef]
- Cai, Y.; Medioni, G. Persistent people tracking and face capture using a PTZ camera. Mach. Vis. Appl. 2016, 27, 397–413. [Google Scholar] [CrossRef]
- Dong, E.; Yan, S.; Tong, J.; Wei, K. Design and implementation of a moving object tracking system. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 274–279. [Google Scholar] [CrossRef]
- Lee, B.; Yun, K.; Choi, J.; Choi, J.Y. Robust pan-tilt-zoom tracking via optimization combining motion features and appearance correlations. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, S.; Tian, Y.; Xu, Y. Automatic control of PTZ camera based on object detection and scene partition. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Ningbo, China, 19–22 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmed, J.; Ali, A.; Khan, A. Stabilized active camera tracking system. J. Real-Time Image Process. 2016, 11, 315–334. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| The expected dwell time means the estimated time a moving target object will continuously be located in FOV after i | |
| The computation time entirely on the drone | |
| The time when the entire computation is offloaded to a remote server | |
| The network error rate at time i | |
| The computation time entirely on drone processors | |
| The expected response time considering network error rate | |
| The delay of the camera in executing commands | |
| The velocity of target moving object at time | |
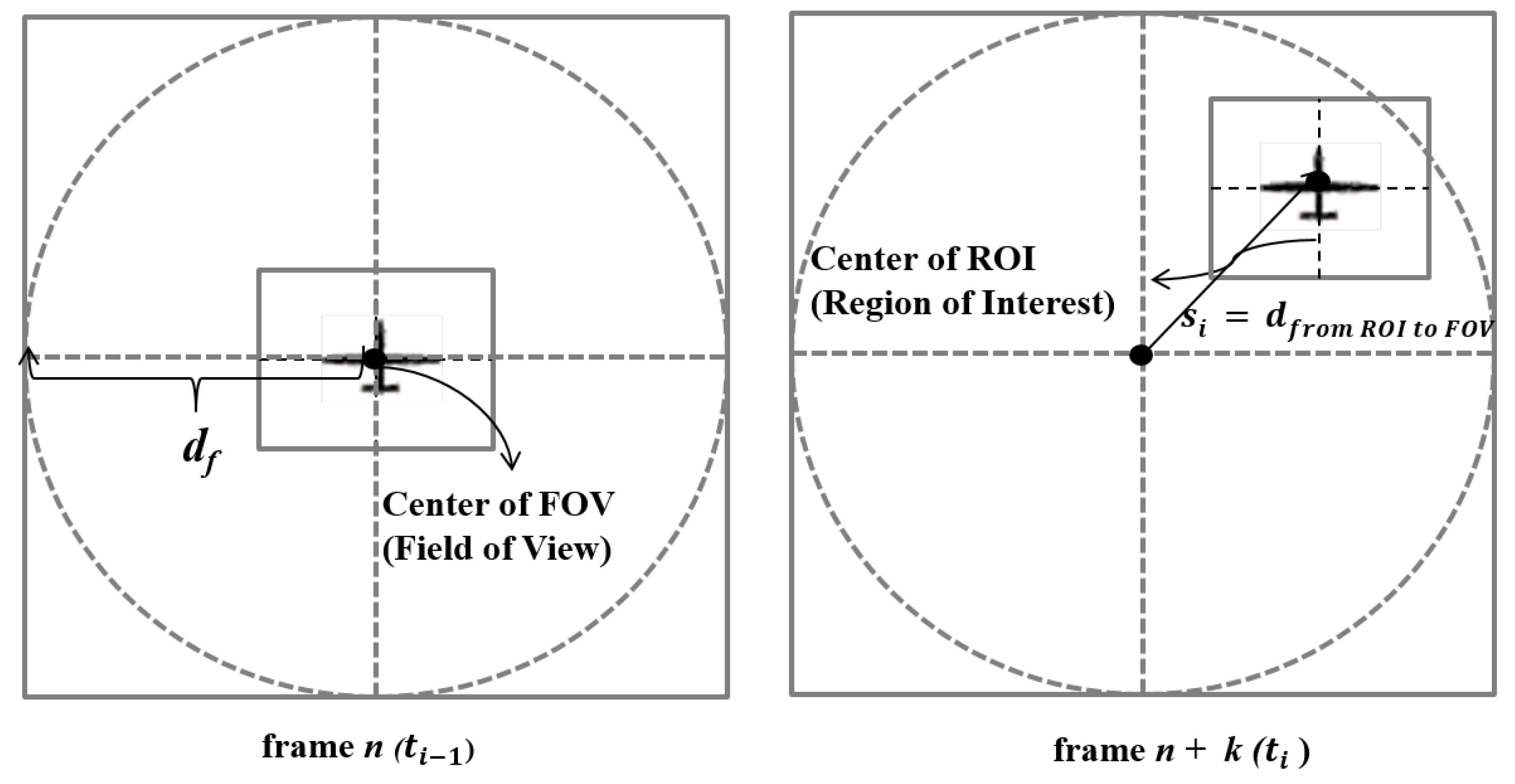
| The position of the center of ROI at time i (square with dashed lines in Figure 1) | |
| The FOV radius | |
| X | The random variable of time at which the failure of a link occurs due to the network error |
| The probability density function of X | |
| r | The network recovery time |
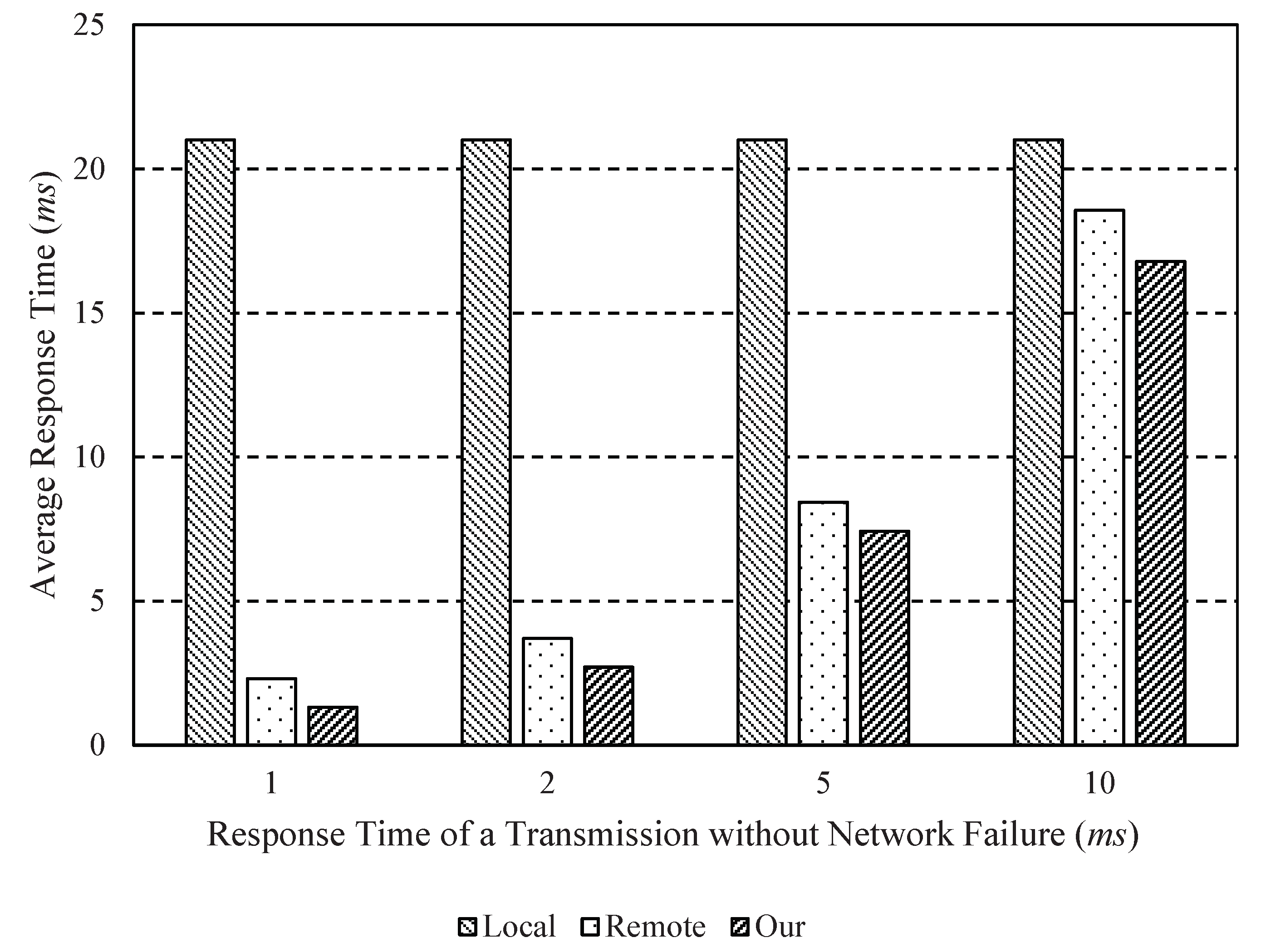
| The response time of a transmission without network failure | |
| The expected response time while considering the network failure |
| Parameter | Description | Value |
|---|---|---|
| The network error rate at time i | [0.01∼0.1] | |
| The computation time entirely on drone processors | 20 ms | |
| The delay of the camera in executing commands | 1 ms | |
| r | The network recovery time | [5, 10, 15, 20] ms |
| The response time of a transmission without network failure | [1, 2, 5, 10] ms | |
| Simulation Time | Total execution time for the simulation | 10,000 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.; Min, H.; Heo, J.; Jung, J. Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems. Sensors 2018, 18, 2982. https://doi.org/10.3390/s18092982
Kim B, Min H, Heo J, Jung J. Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems. Sensors. 2018; 18(9):2982. https://doi.org/10.3390/s18092982
Chicago/Turabian StyleKim, Bongjae, Hong Min, Junyoung Heo, and Jinman Jung. 2018. "Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems" Sensors 18, no. 9: 2982. https://doi.org/10.3390/s18092982
APA StyleKim, B., Min, H., Heo, J., & Jung, J. (2018). Dynamic Computation Offloading Scheme for Drone-Based Surveillance Systems. Sensors, 18(9), 2982. https://doi.org/10.3390/s18092982