Extending QGroundControl for Automated Mission Planning of UAVs


Abstract
1. Introduction
2. Related Work
3. Mission Designer
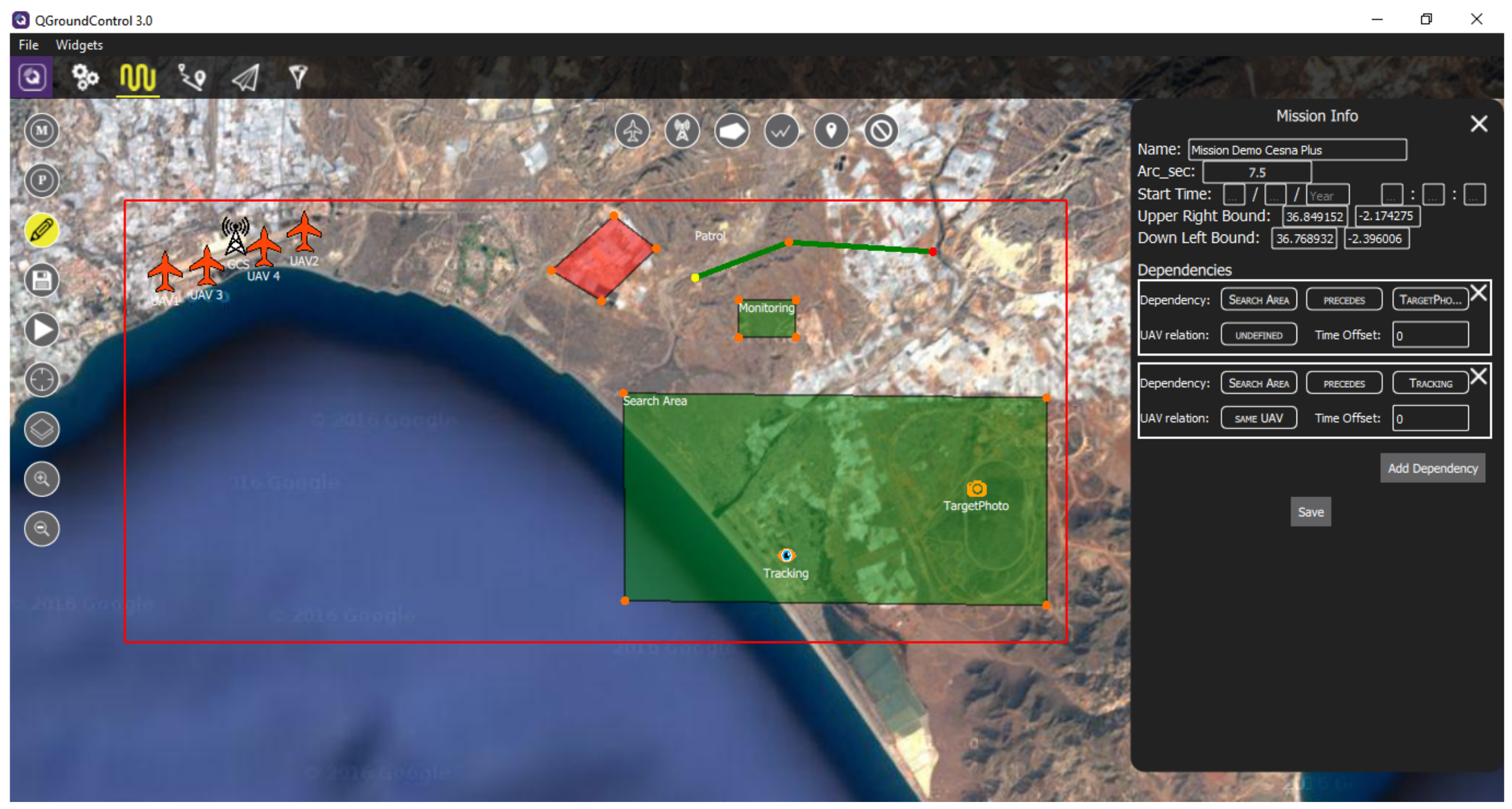
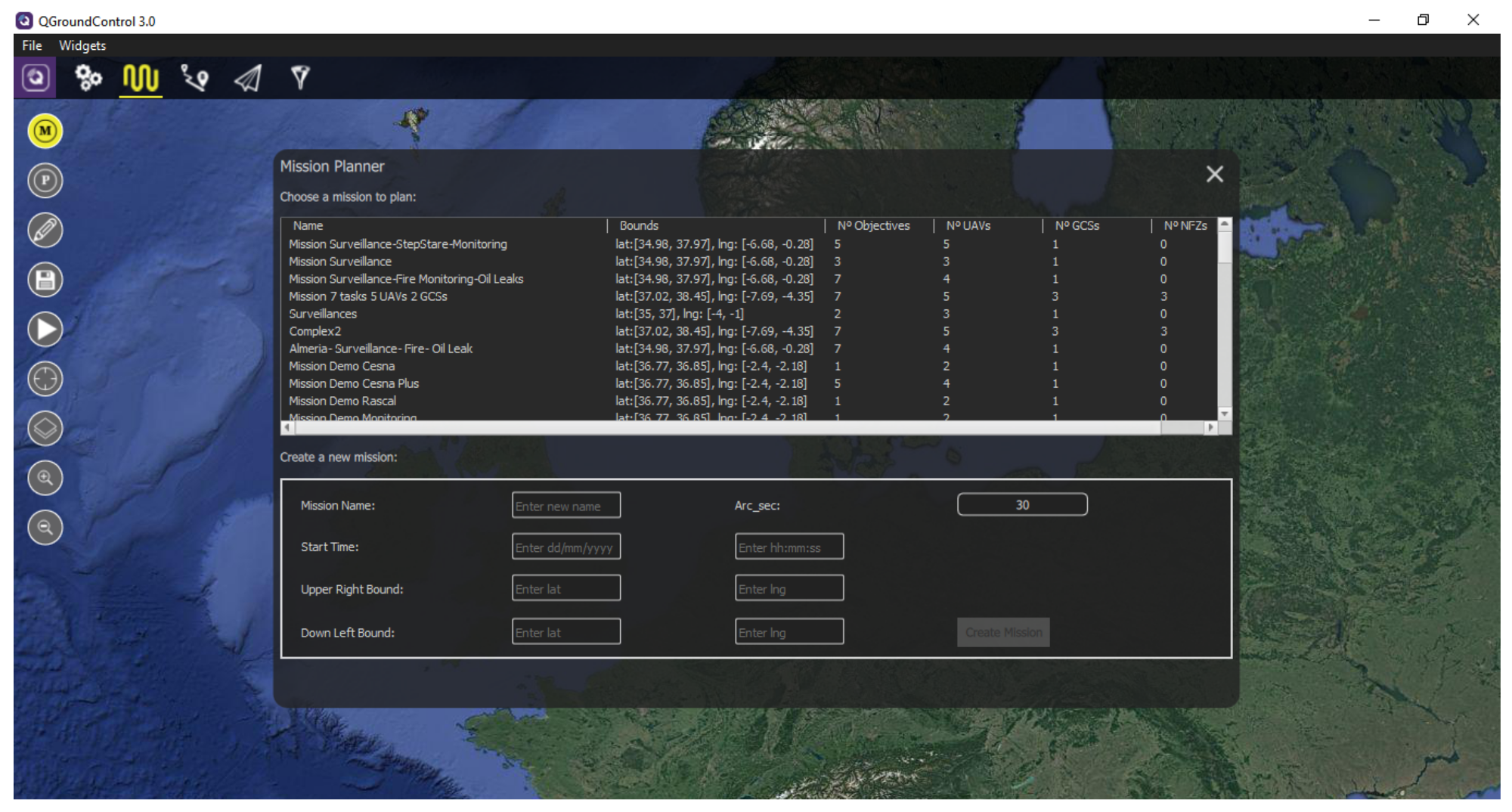
3.1. Creating New Missions
- The name of the mission: This name will be used later to identify this mission when reading it.
- The bounds of the mission scenario: The upper-right and bottom-left bounds that identify the limits of the mission, given in latitude and longitude degrees.
- The arc-seconds of the elevation map to be used by the mission planner. The possible values are 30, 15 and arc-seconds.
- The start time of the mission (optional), expressed as date and time. If not provided, the time will be taken from the CPU clock when the simulation starts.
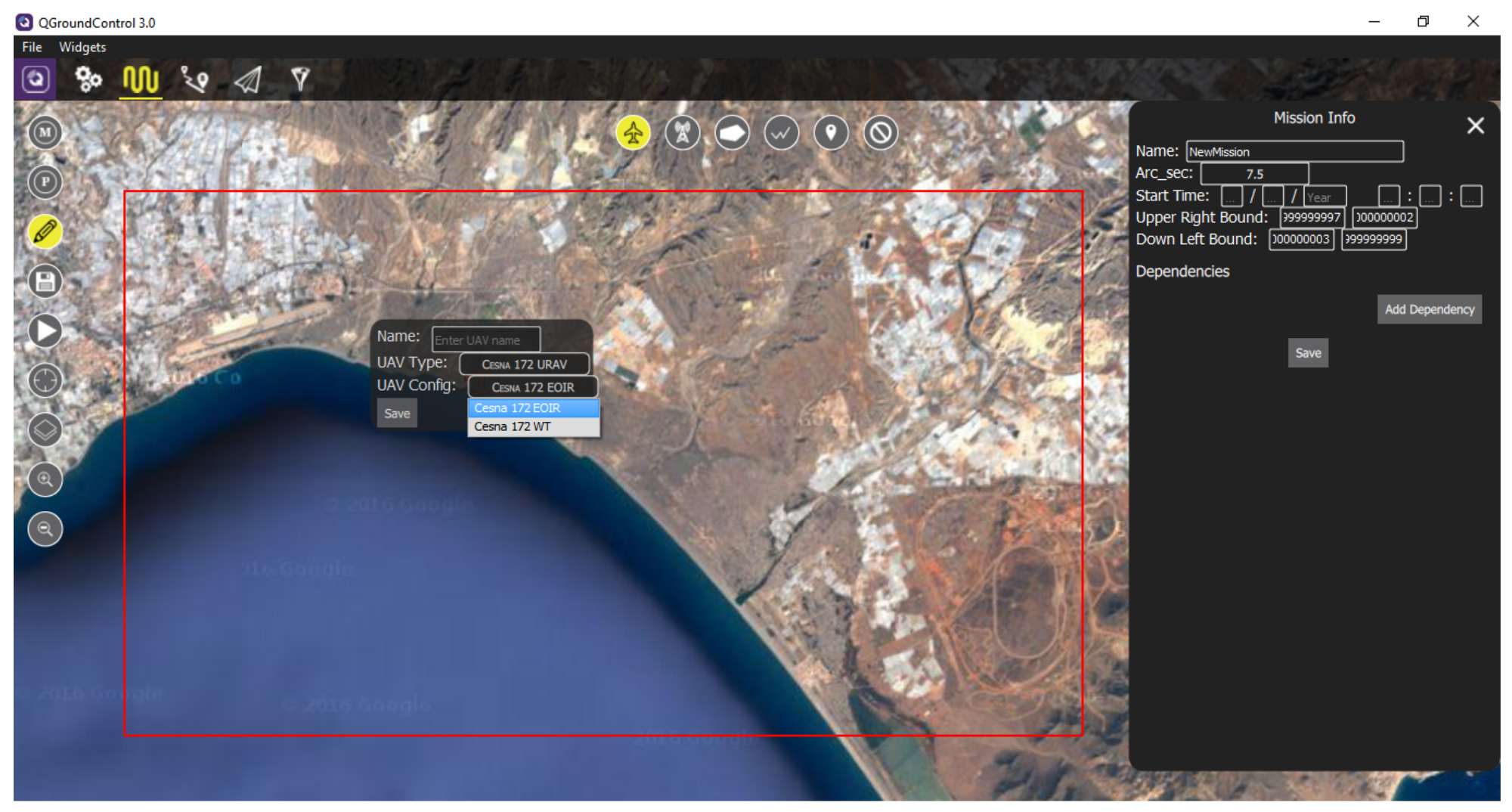
3.2. Adding a New UAV
- The name of the UAV.
- The initial amount of fuel of the UAV, expressed in kg.
- The position of the UAV (latitude, longitude and altitude in ft).
- The (optional) end position for the departure runway of the UAV, where it must go when taking off.
- The (optional) start position for the landing track of the UAV, where it must first go when landing.
- The (optional) end position of the UAV, where it must land when the mission ends.
- The (optional) start and end times of use of the UAV. These are expressed as a date and time and can only be used when the start time of the mission has been defined.
- The type of the UAV. This property defines the type of vehicle used (e.g., HALE, MALE, URAV, UCAV, etc.). This property is comprised of a set of characteristics of the UAV:
- –
- The mass of the vehicle (in kg).
- –
- The maximum fuel capacity (in kg).
- –
- The cost per hour.
- –
- The maximum altitude limit (in ft).
- –
- The maximum speed limit (in knots).
- –
- The maximum flight time (in hours).
- –
- The maximum range or distance (in NM).
- –
- A set of flight profiles, defining the performance of the vehicle in terms of speed (in knots), fuel consumption (in kg/h) and altitude (in ft) or angle of climb/descent (in degrees). In this work, the flight profiles considered for every vehicle are a minimum consumption profile, a maximum speed profile, a climb profile and a descent profile.
- The configuration of the UAV. This property defines the configuration of the vehicle, specifically the set of sensors carried by it.
3.3. Adding a New GCS
- The name of the GCS.
- The position of the GCS (latitude, longitude and altitude in ft).
- The type of GCS. This property defines the type of station used, which is comprised of a set of characteristics:
- –
- The range of communications (in NM).
- –
- The maximum number of vehicles that the station can control simultaneously.
- –
- The type of vehicles that the station can control.
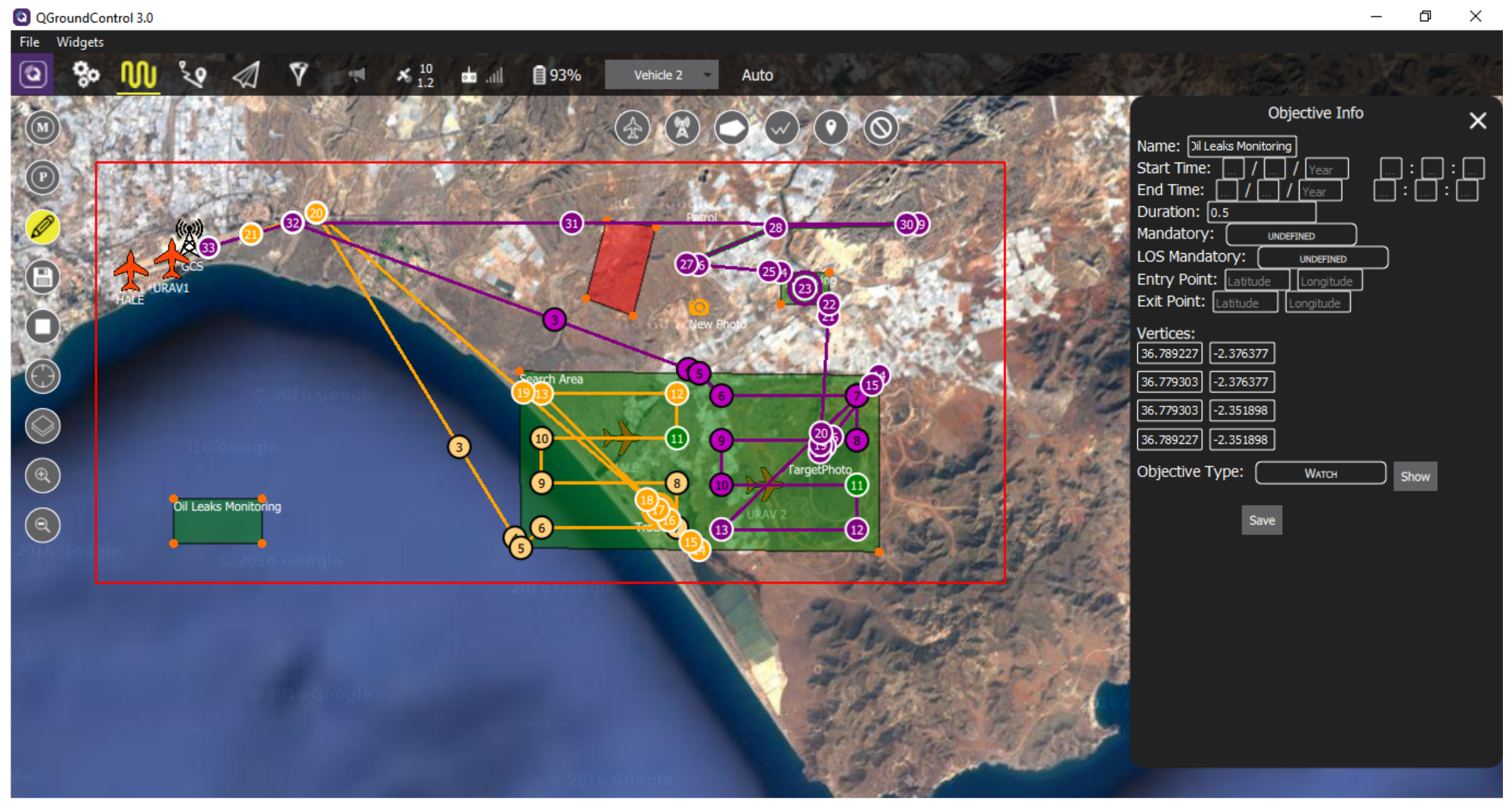
3.4. Adding an Objective or Task
- The name of the objective.
- The (optional) start and end times of the objective. These are expressed as a date and time and can only be used when the start time of the mission has been defined.
- The (optional) duration of the objective. This can only be used with zone and point objectives. When provided, loitering around the zone or the point will be performed during the specified duration.
- Whether the objective is mandatory or not.
- Whether Line of Sight (LOS) must be maintained during the objective performance or not.
- The (optional) entry and exit points of the zone objective (expressed in latitude and longitude). These can only be used in zone objectives.
- The vertices of the zone or the path (expressed in latitude and longitude).
- The position of the point (expressed in latitude and longitude). Whether this or the previous property is used, but not both.
- The type of objective. This property defines the type of objectives (e.g., target photographing, escorting an individual, fire extinguishing, etc.). Depending on this type, an objective may comprise one or more tasks, each one needing a specific sensor for its performance. Depending on the type of task, it must be performed by just one vehicle (e.g., tracking or photographing) or could be performed by several (e.g., mapping or surveillance). In addition, some time or vehicle dependency may be established between the tasks of the objective. These dependencies are discussed in Section 3.6.
3.5. Adding an NFZ
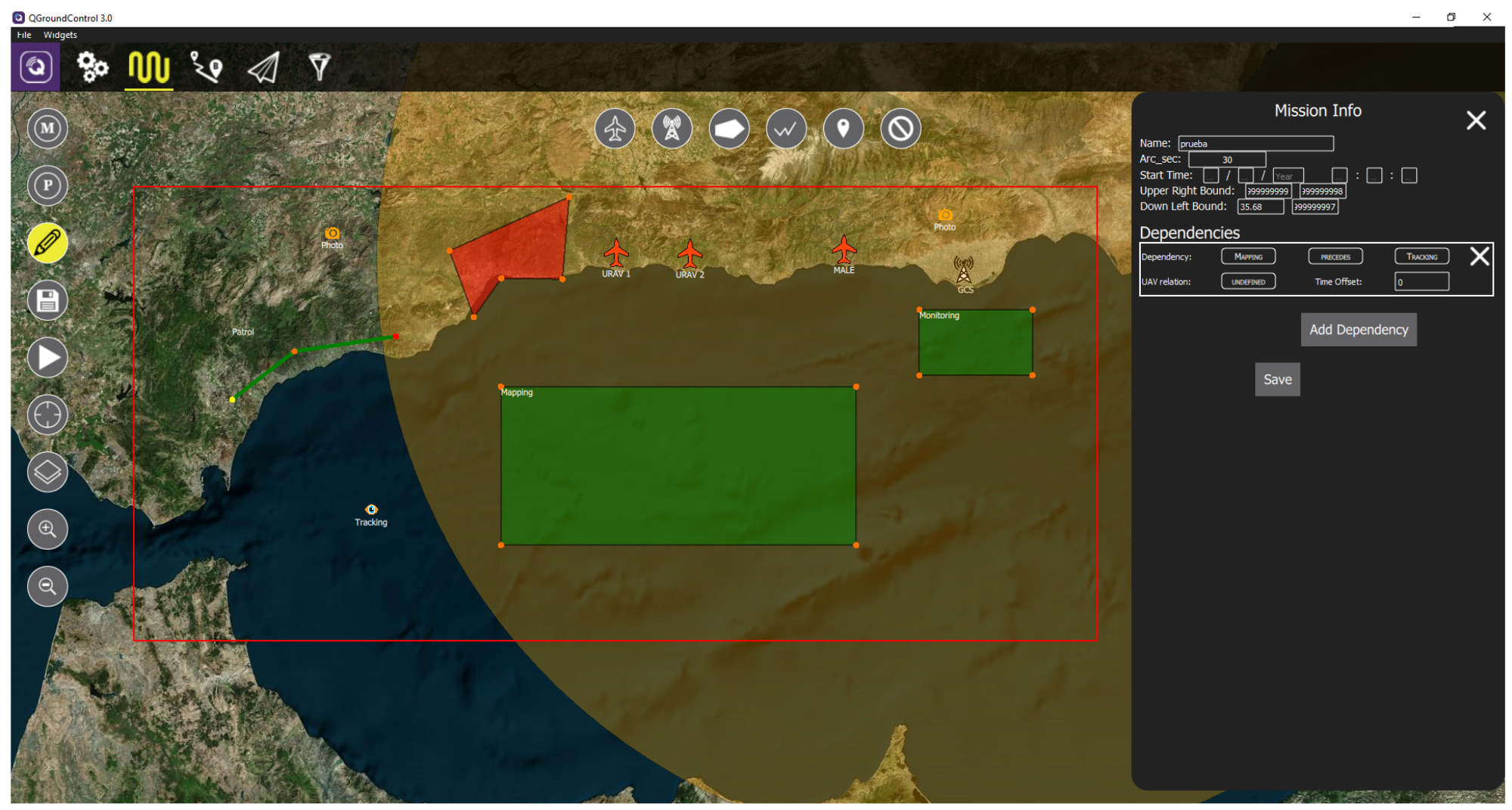
3.6. Adding Objective Dependencies
- First objective involved in the dependency.
- The type of dependency. The different types are defined in Allen interval algebra (see Table 1).
- Second objective involved in the dependency.
- UAV relation between objectives. This value may be undefined or provided if both objectives must be performed by the same UAV or by different UAVs.
- Time offset. This property defines the time offset applied between both objectives when considering the dependency (e.g., if an objective precedes another one, then the time offset sets the minimum duration that must pass between the end of the first objective and the start of the second).
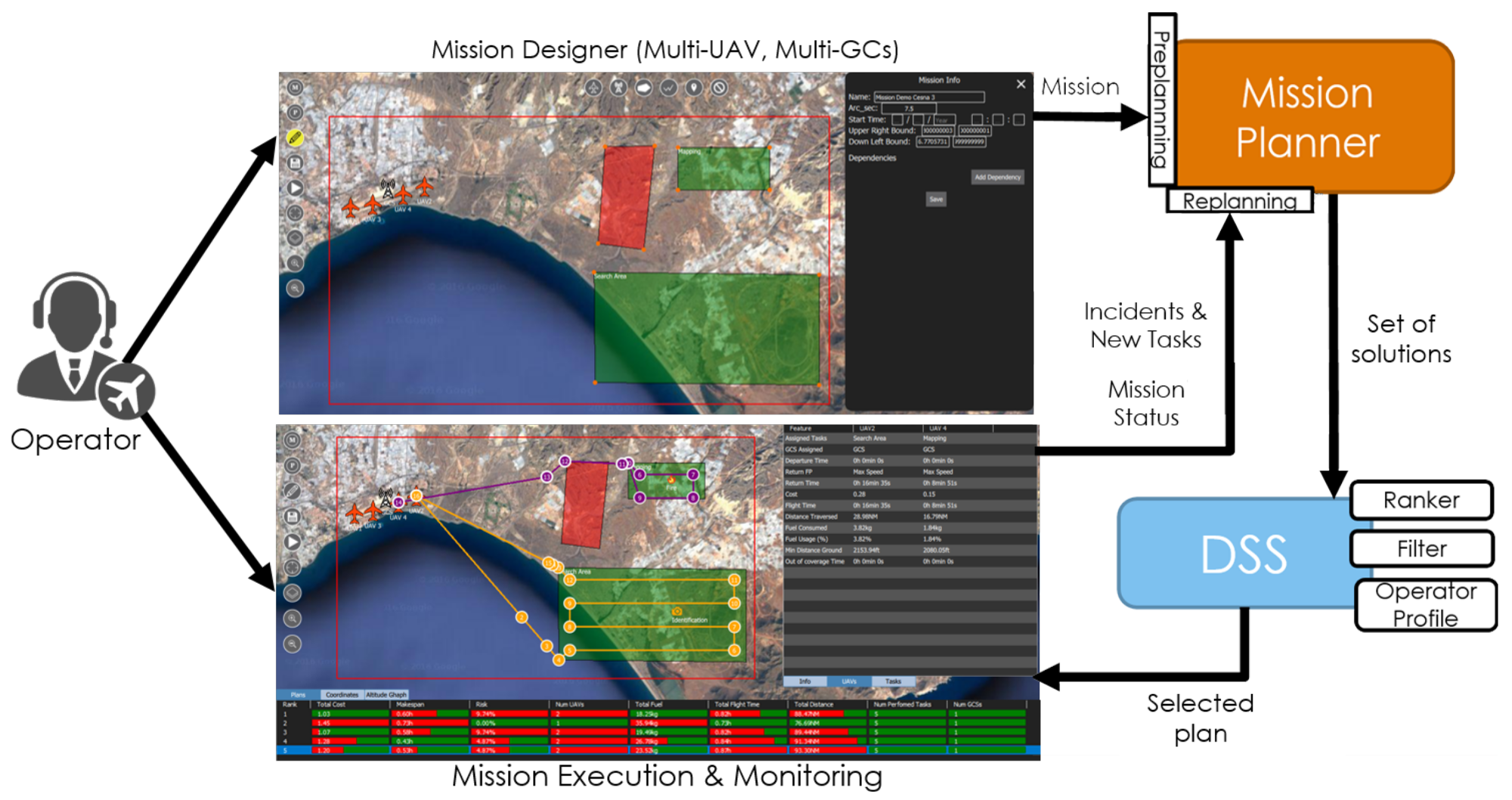
4. Automated Mission Planner and DSS
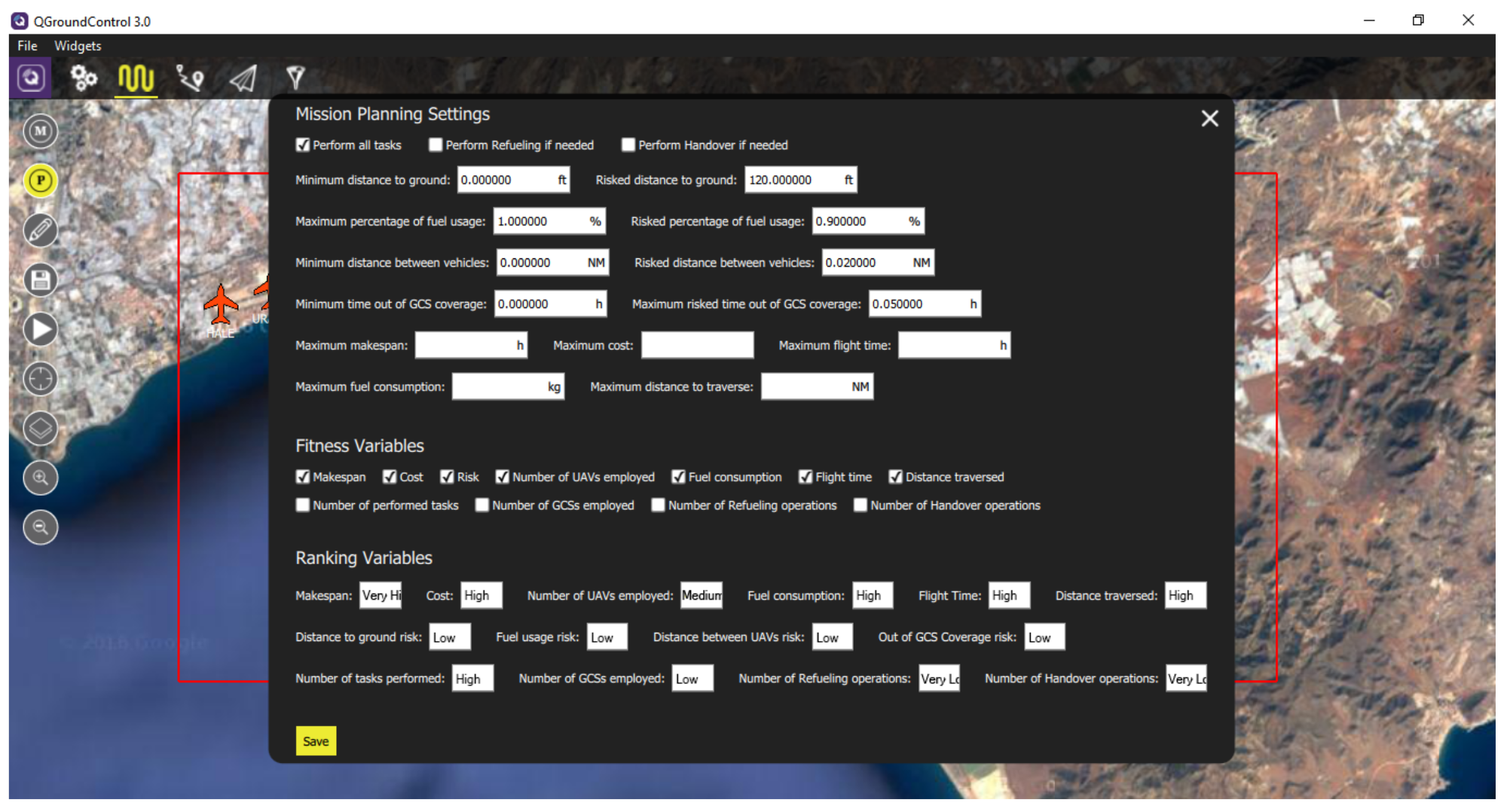
4.1. Operator Profile
- Whether all tasks must be performed or not.
- Minimum and risk factor distance from the ground: These variables define the interval for the risk factor distance from the ground, where the minimum represents a risk of 100% and values higher than the risk represent a 0% risk.
- Maximum and risk factor percentage of fuel usage: These variables define the interval for the risk factor of fuel usage per UAV, where the maximum represents a risk of 100% and values lower than the risk represent a 0% risk.
- Minimum and risk factor of distance between vehicles: These variables define the interval for the risk factor distance between UAVs, where the minimum represents a risk of 100% and values higher than the risk represent a 0% risk.
- Minimum and maximum risky factor of time out of GCS coverage: These variables define the interval for the risk factor of time out of GCS coverage, where the minimum represents a risk of 0% and the maximum risk represents a 100% risk.
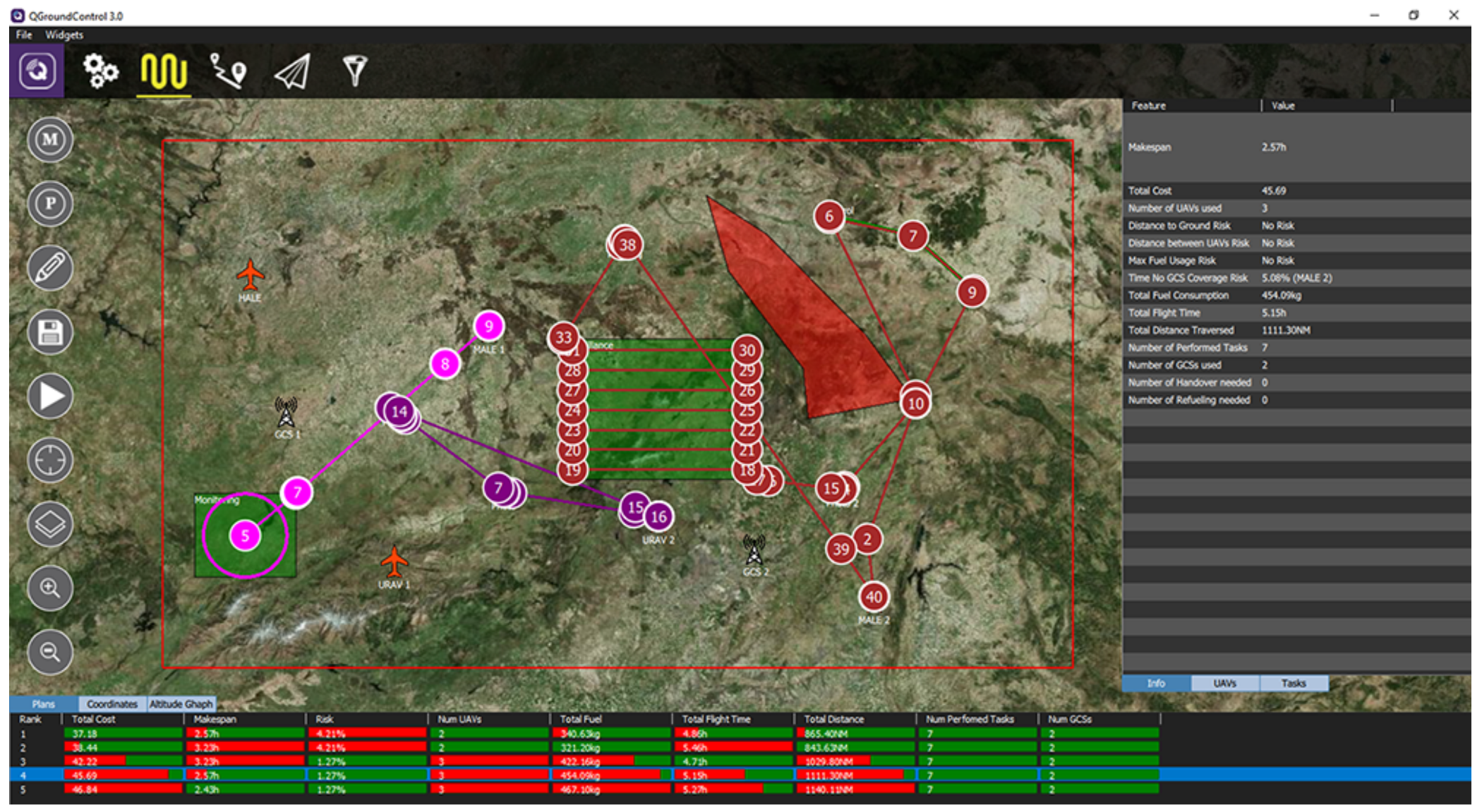
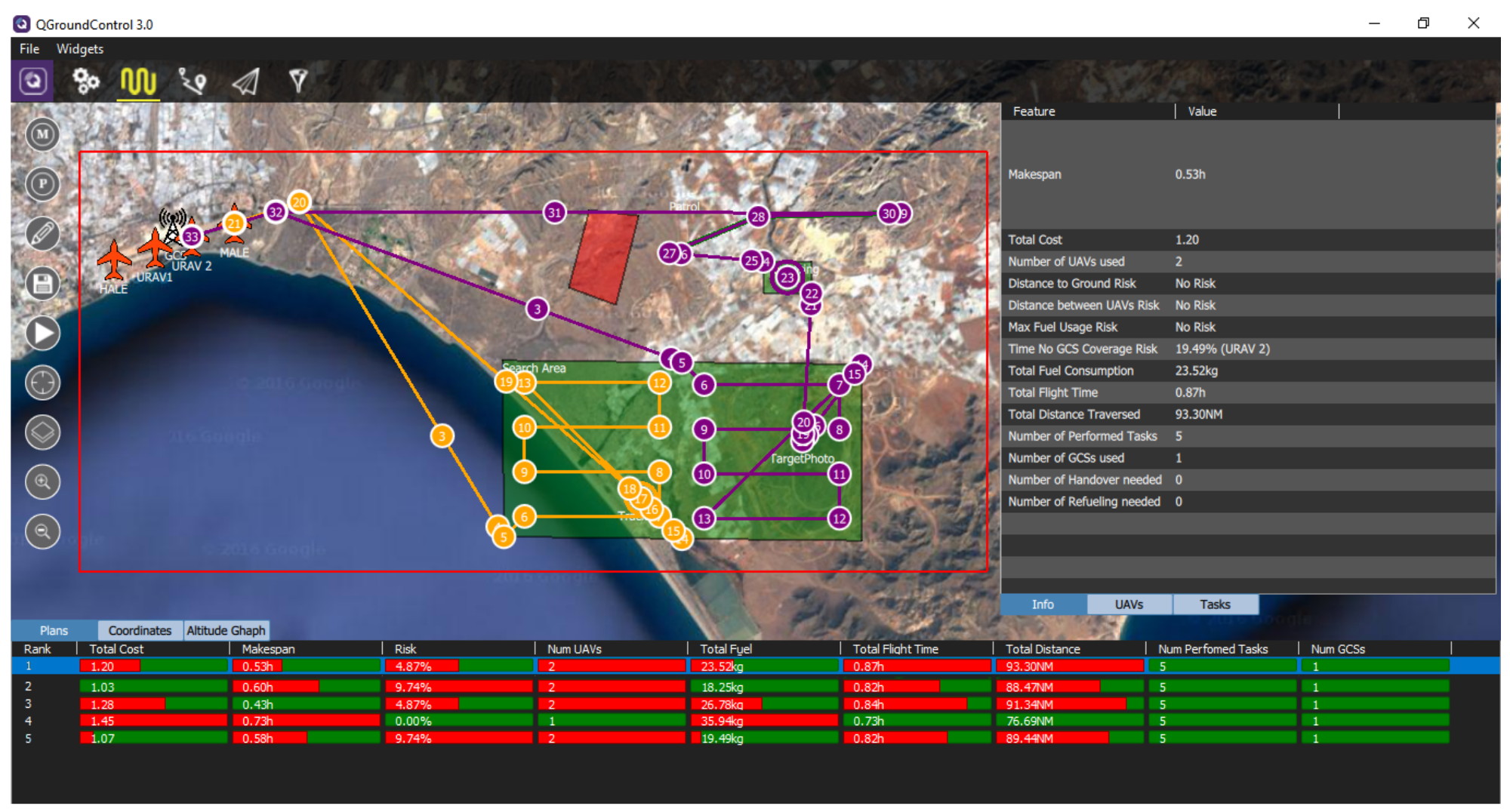
- Makespan or end time of the mission.
- Total cost of the mission.
- Total fuel consumption of vehicles in the mission.
- Total flight time of the vehicles in the mission.
- Total distance traversed by the vehicles in the mission.
- Risk of high fuel usage. This considers the UAVs that finish the mission with low fuel.
- Risk of low distance from the ground. This considers the vehicles that fly near the ground (depending on the route and the altitude of the adopted flight profile).
- Risk of GCS coverage loss. This considers UAVs that fly out of the coverage or LOS of the GCSs controlling them.
- Risk of UAV closeness. This considers vehicles that fly close to each other, which intuitively depends on the time constraints between concurrently-performed tasks and eventual spatial overlaps among routes/flight profiles.
- Number of UAVs employed in the mission.
- Number of tasks performed. This is considered when some tasks or objectives are not mandatory.
- Number of GCSs employed in the mission.
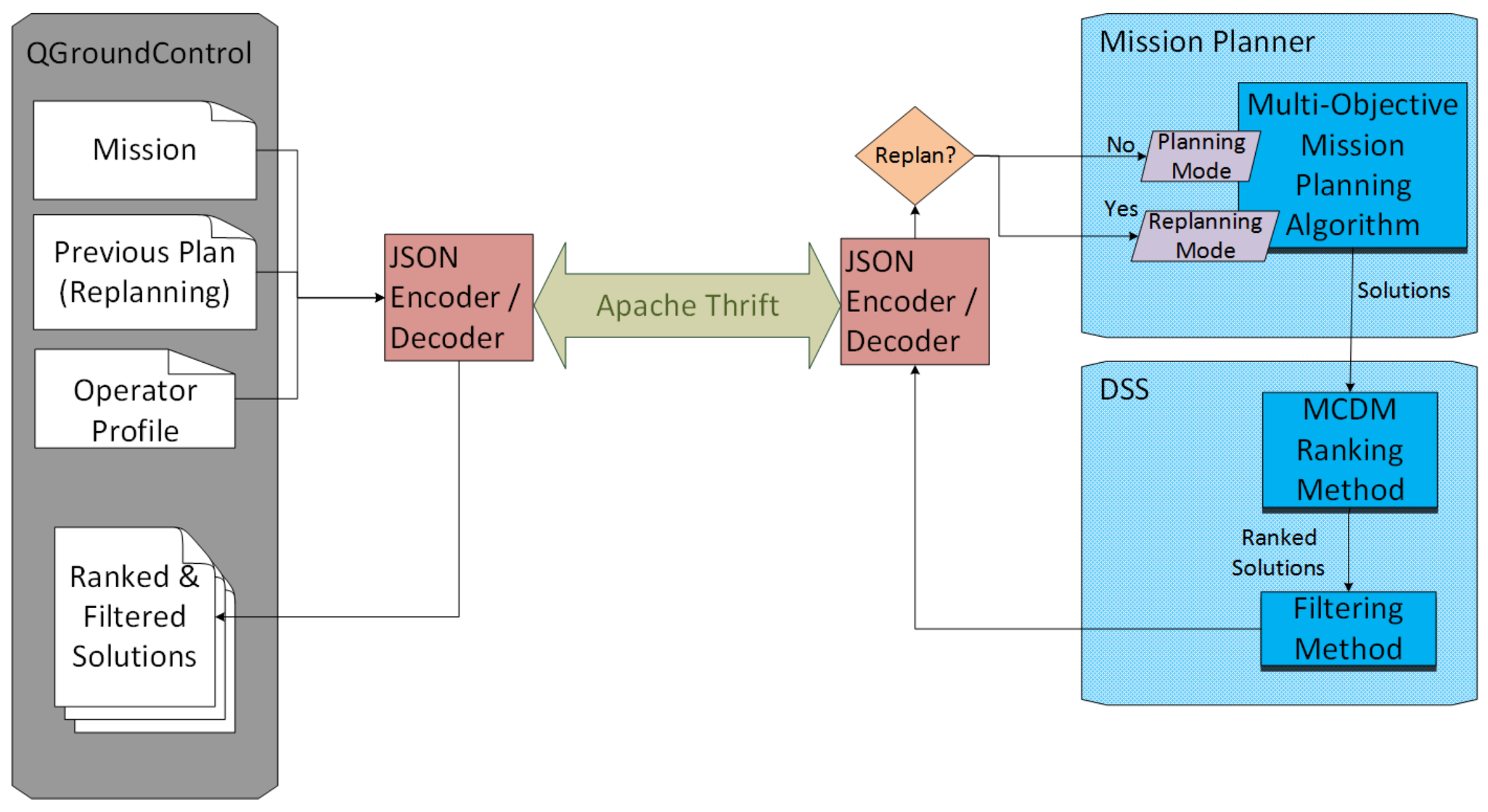
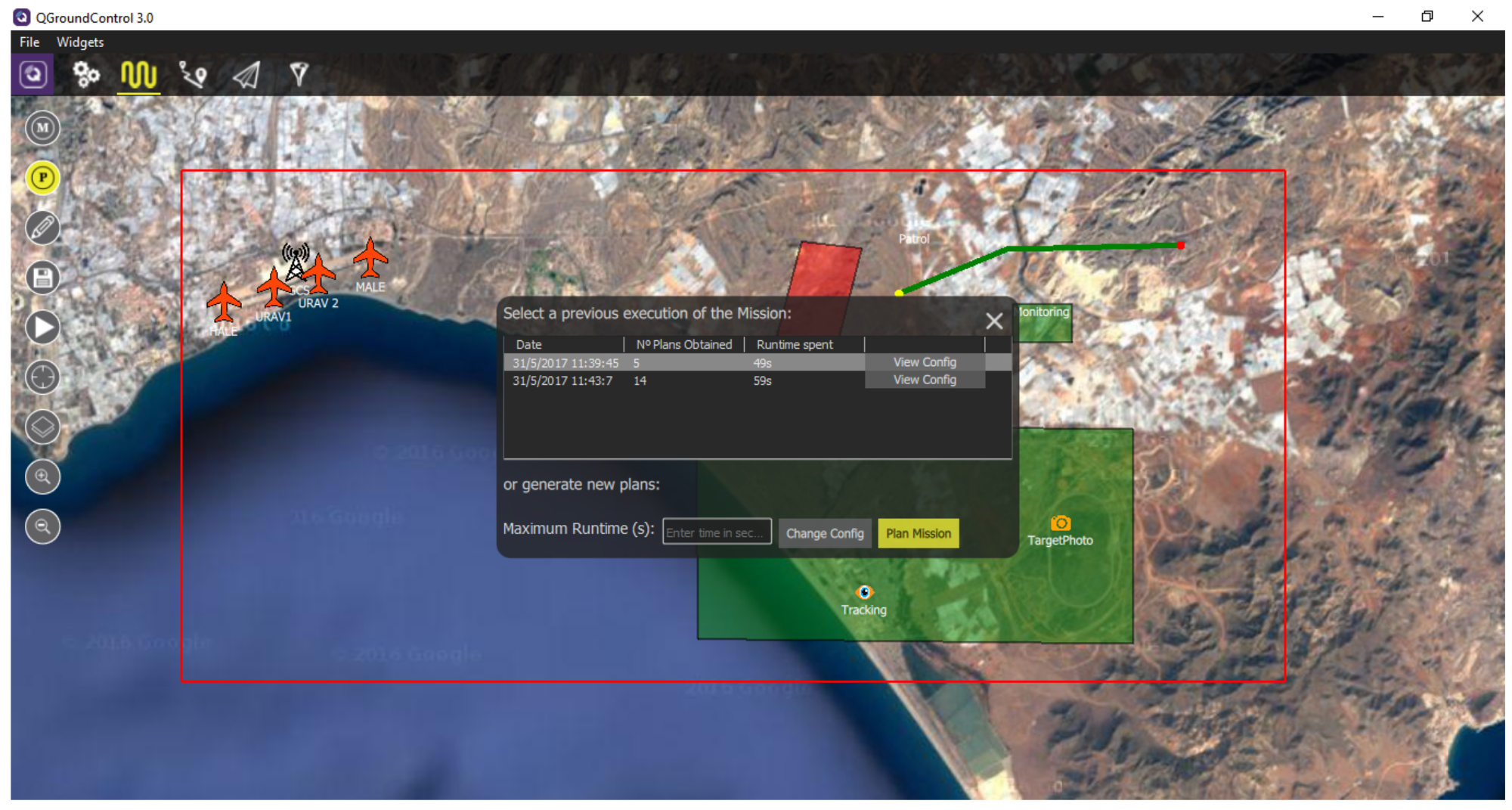
4.2. Mission Planning
- Maximum makespan: The maximum valid makespan. Plans with higher makespan will be rejected from the solutions.
- Maximum cost: The maximum valid cost. Plans with higher cost will be rejected from the solutions.
- Maximum flight time: The maximum valid flight time. Plans with higher flight time will be rejected from the solutions.
- Maximum fuel consumption: The maximum valid fuel consumption. Plans with higher fuel consumption will be rejected from the solutions.
- Maximum distance traversed: The maximum valid distance traversed. Plans with a higher distance traversed will be rejected from the solutions.
4.3. DSS Ranking and Filtering
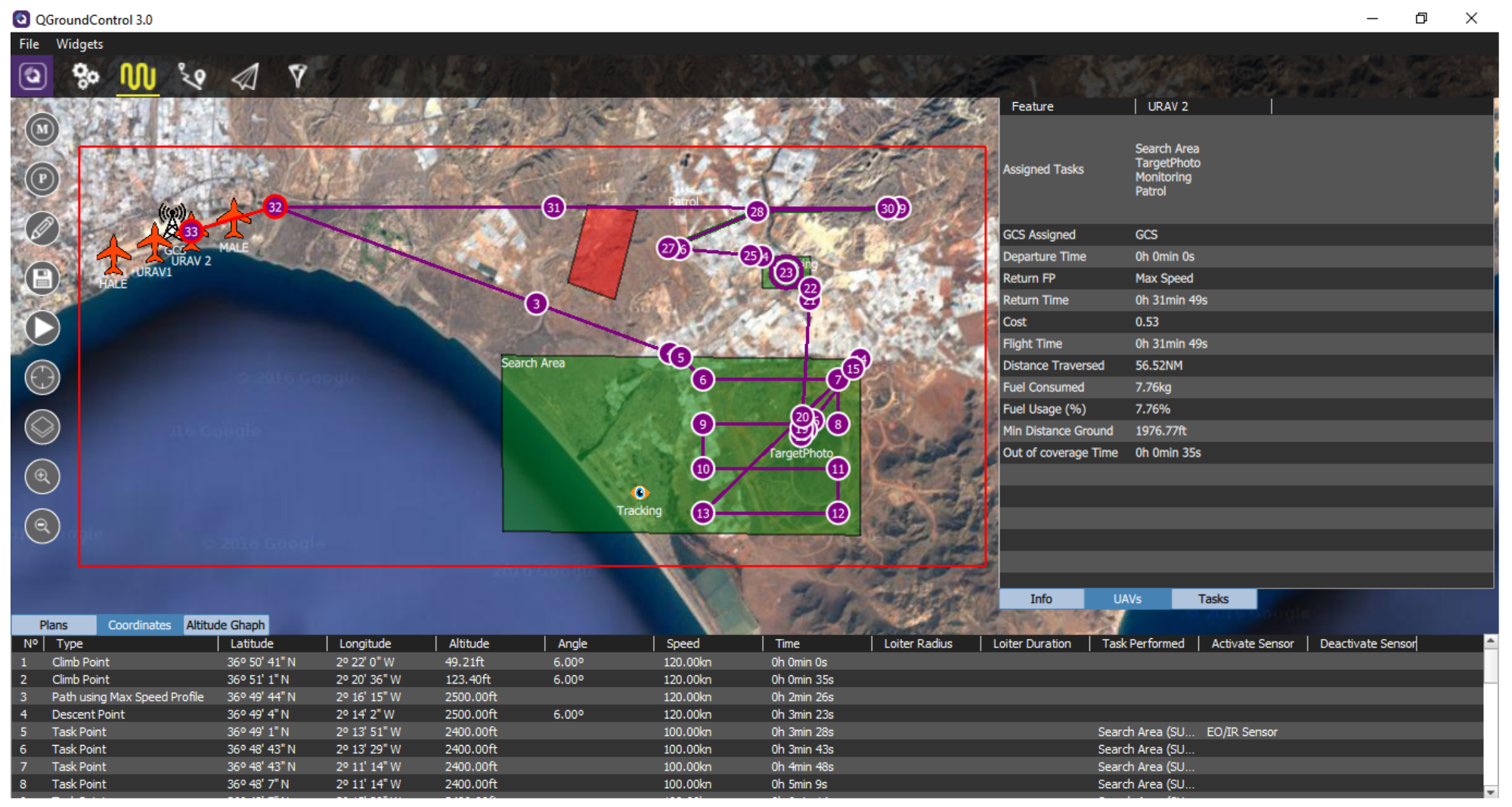
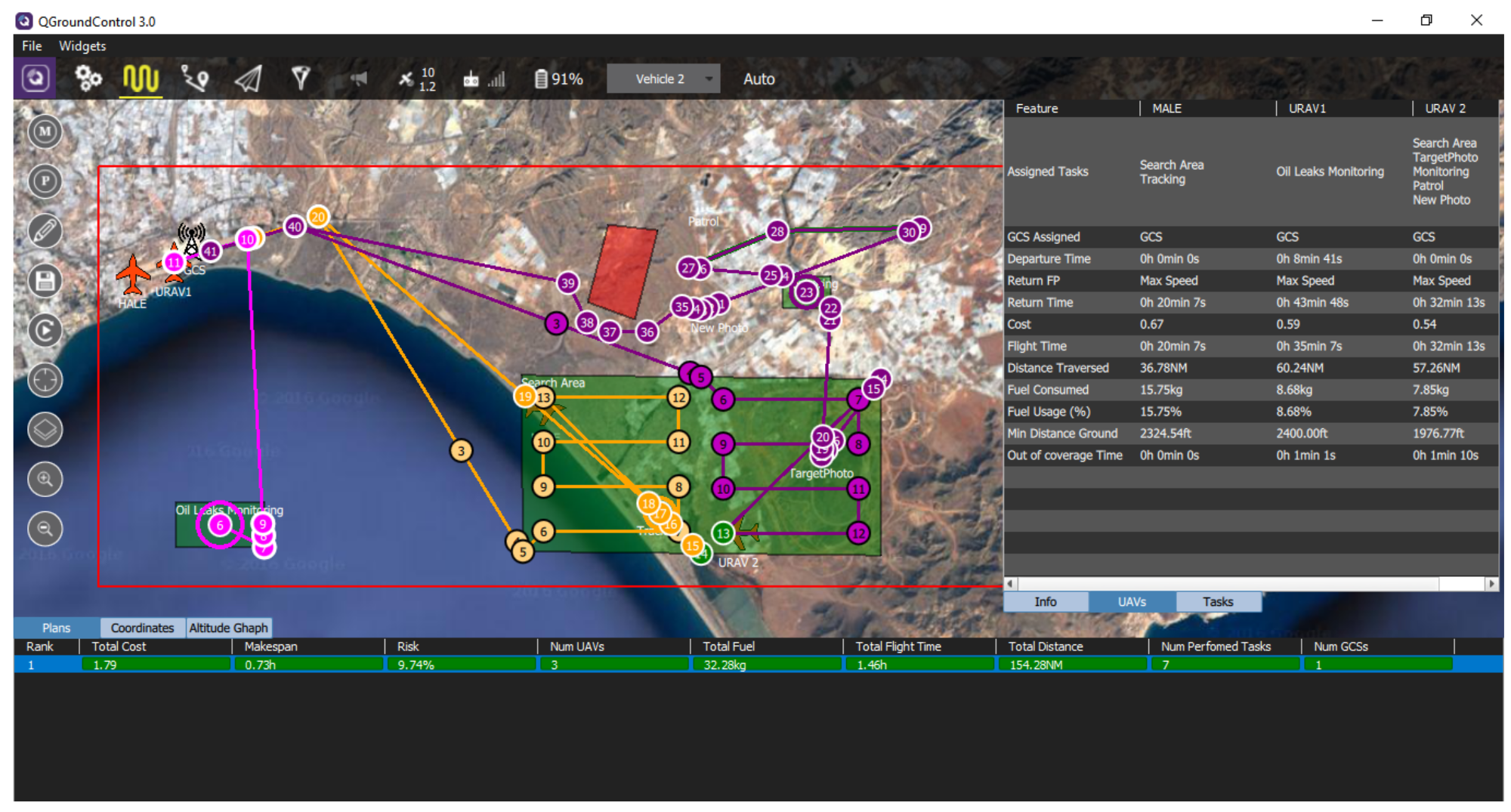
4.4. Plan Visualization
- The assigned tasks (in order) that the UAV performs.
- The GCS assigned to the UAV in the mission.
- The departure time for the UAV in the mission.
- The return time for the UAV in the mission and the return flight profile (FP) used.
- The cost of use of the UAV in the mission.
- The flight time of the UAV in the mission.
- The distance traversed by the UAV in the mission.
- The fuel consumed by the UAV in the mission.
- The percentage of fuel usage of the UAV.
- The minimum distance to the ground of the UAV during the mission.
- The time spent by the UAV out of the GCS coverage during the mission.
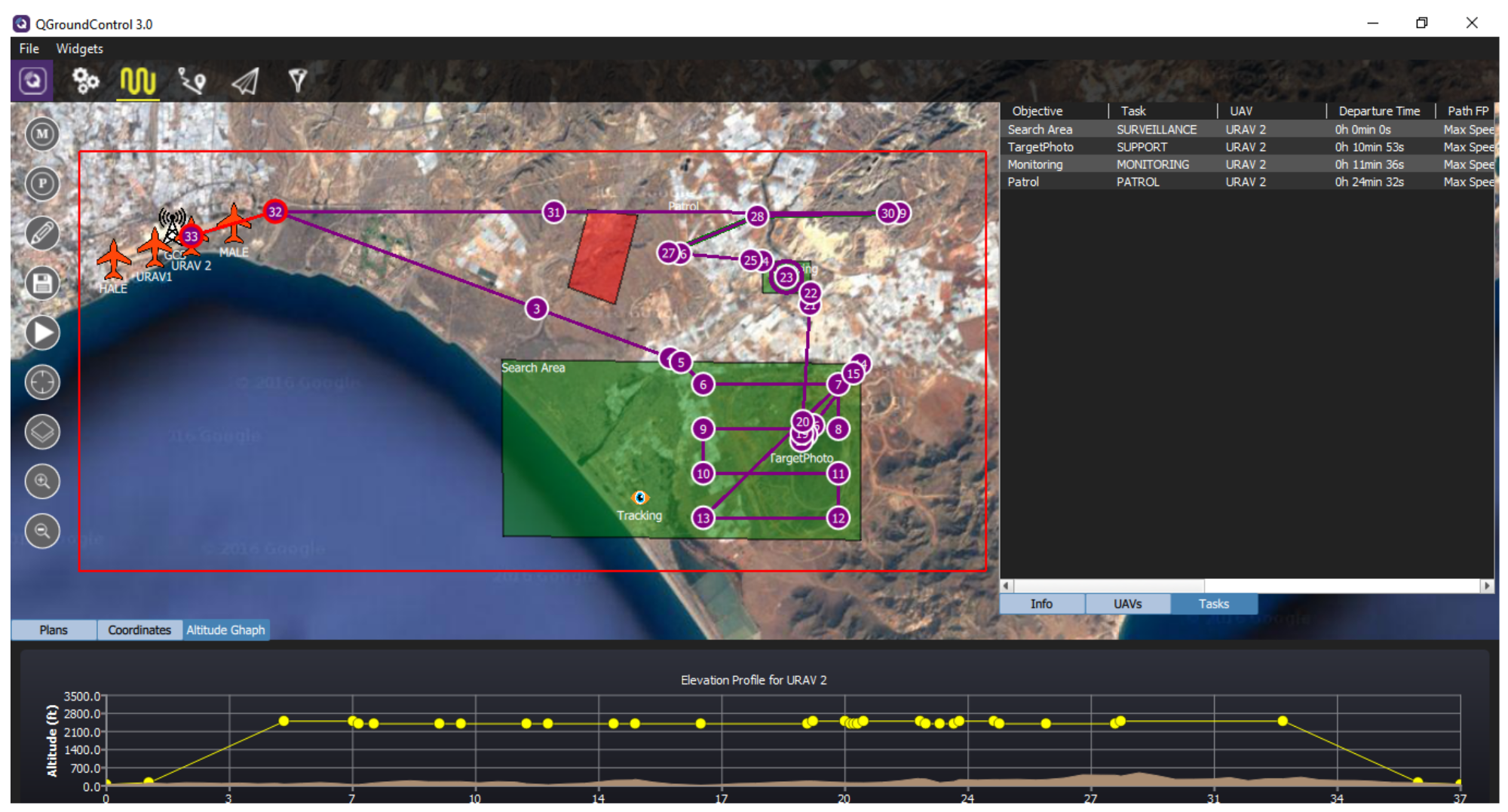
- The objective considered
- The task of the objective considered (at least one)
- The UAV assigned to the task.
- The departure time for the UAV when it starts going to the task zone.
- The flight profile used in the path to reach the task zone.
- The wait loiter duration in case the task has some time restriction and the vehicle must wait until its start.
- The start time of the task.
- The sensor used for the performance of the task.
- The duration of the task.
- The end time of the task.
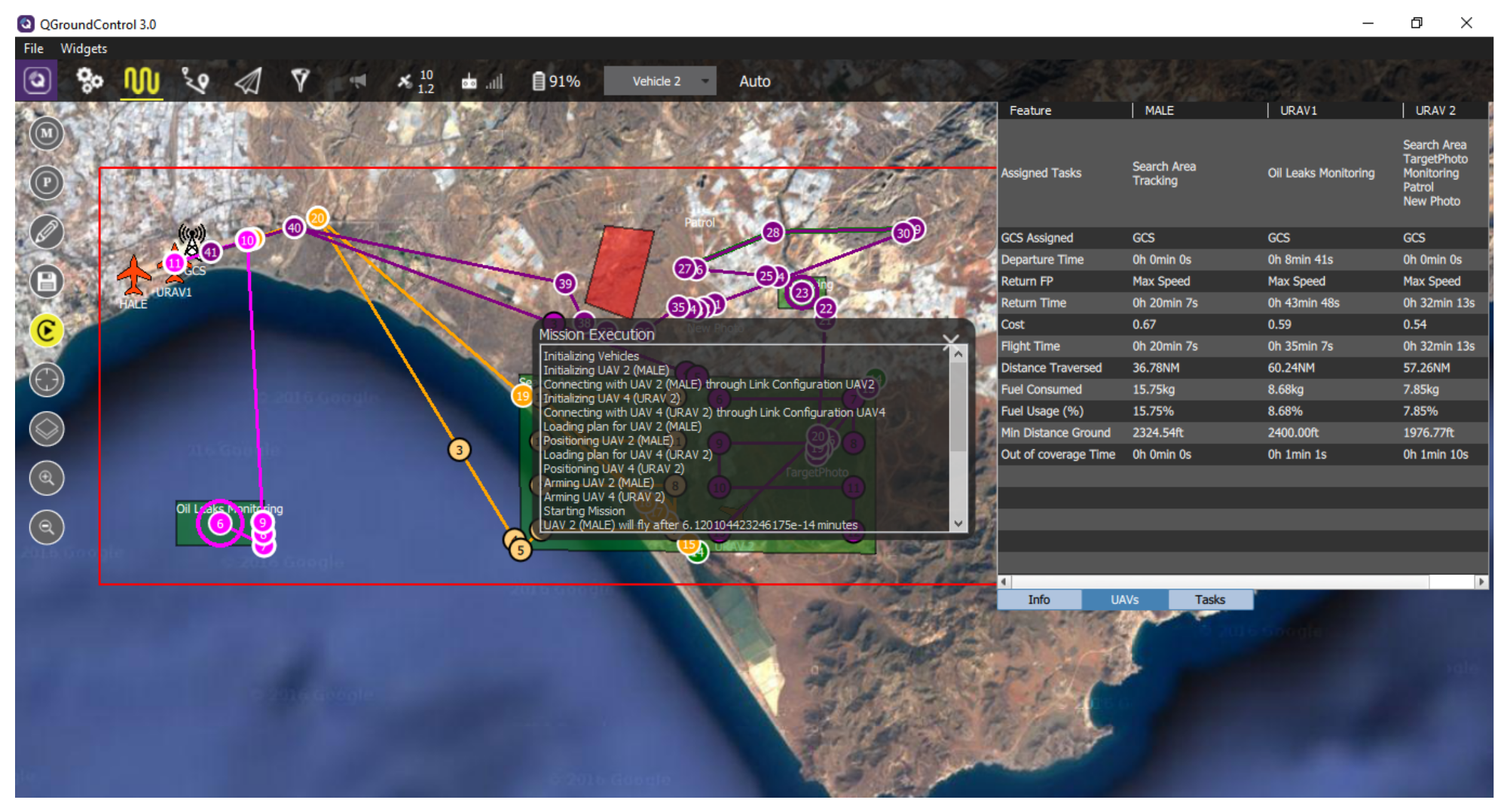
5. Mission Execution and Replanning
6. Use Cases on the Extended QGroundControl
6.1. First Use Case: A Walk through the Framework
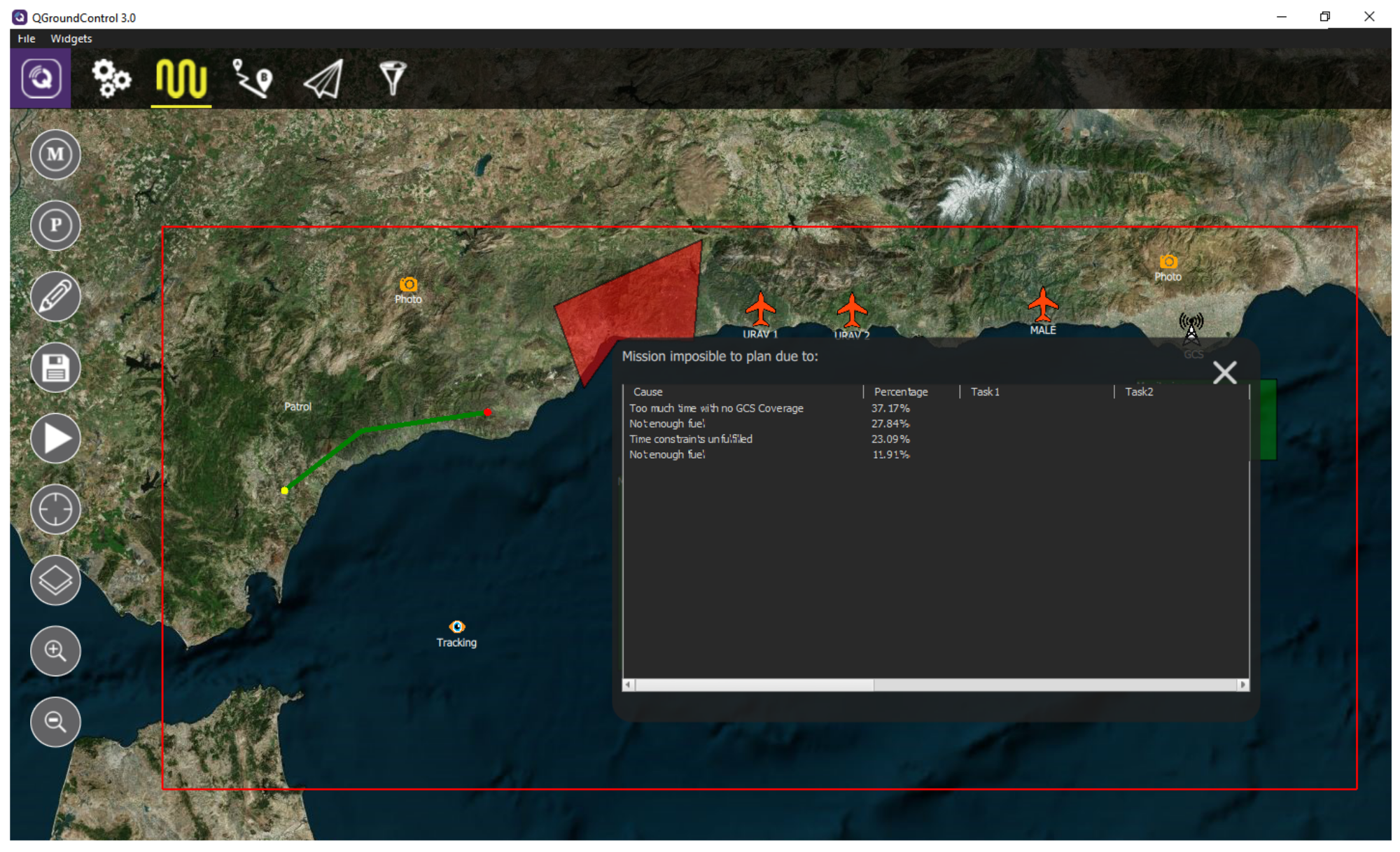
6.2. Second Use Case: Working with Unresolvable Missions
7. Conclusions
- The design and development of a mission designer, which provides an interactive environment for the creation and visualization of missions, including its objectives/tasks, vehicles, GCSs, NFZs, etc.
- Integration of an interface for an automated mission planner and DSS, in order to test different mission planning and DSS algorithms, which generate, rank and filter plans for the missions designed.
- Design and development of a plan visualizer, which permits one to graphically represent the plans, including the paths for each UAV and the information related to the optimality and risks of the plan.
- Design and development of a mission monitoring system, which informs the operator about the waypoints already passed by and the tasks already performed.
- Design and development of a replanning system and integration of the automated mission replanner inside the QGroundControl by reusing the interface for automated mission planning. This permits the operator to inform the system about new objectives/tasks or incidents during the execution of the mission and call the mission replanner in order to obtain new plans for the updated mission.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Use Cases (Screenshots)














References
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Monitoring. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 2643–2666. [Google Scholar]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016. [Google Scholar]
- Evers, L.; Dollevoet, T.; Barros, A.I.; Monsuur, H. Robust UAV mission planning. Ann. Oper. Res. 2014, 222, 293–315. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Del Ser, J.; Camacho, D. Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. In Swarm and Evolutionary Computation; Elsevier: New York City, NY, USA, 2018; pp. 1–16. [Google Scholar]
- Fukushima, Y.; Science, A. Onboard Mission Replanning Using Operation Script and Orthogonal. In Proceedings of the i-SAIRAS: International Symposium on Artificial Intelligence, Robotics and Automation in Space, Turin, Italy, 4–6 September 2012. [Google Scholar]
- Ramirez-Atencia, C.; Bello-Orgaz, G.; R-Moreno, M.D.; Camacho, D. MOGAMR: A Multi-Objective Genetic Algorithm for Real-Time Mission Replanning. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Ramirez-Atencia, C.; Mostaghim, S.; Camacho, D. A Knee Point based Evolutionary Multi-objective Optimization for Mission Planning Problems. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO 2017); ACM: New York City, NY, USA, 2017; pp. 1216–1223. [Google Scholar]
- QGroundControl GCS. Available online: http://www.qgroundcontrol.org/ (accessed on 15 June 2018).
- Sibley, C.; Coyne, J.; Avvari, G.V.; Mishra, M.; Pattipati, K.R. Supporting Multi-objective Decision Making within a Supervisory Control Environment. In Foundations of Augmented Cognition: Neuroergonomics and Operational Neuroscience; Schmorrow, D.D., Fidopiastis, C.M., Eds.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2016; pp. 210–221. [Google Scholar]
- Garcia, R.; Barnes, L. Multi-UAV Simulator Utilizing X-Plane. In Proceedings of the 2nd International Symposium on UAVs, Reno, NV, USA, 8–10 June 2009; pp. 393–406. [Google Scholar]
- Rodriguez-Fernandez, V.; Menendez, H.D.; Camacho, D. Design and development of a lightweight multi-UAV simulator. In Proceedings of the 2015 IEEE 2nd International Conference on Cybernetics (CYBCONF), Gdynia, Poland, 24–26 June 2015; pp. 255–260. [Google Scholar]
- ArduPilot. Available online: http://ardupilot.org/ (accessed on 15 June 2018).
- PX4 Pro Autopilot. Available online: http://px4.io/ (accessed on 15 June 2018).
- MAVLink. Micro Air Vehicle Communication Protocol. 2018. Available online: https://mavlink.io/ (accessed on 15 June 2018).
- MAVProxy. Available online: https://ardupilot.github.io/MAVProxy/html/index.html (accessed on 15 June 2018).
- Mission Planner. Available online: http://ardupilot.org/planner/ (accessed on 15 June 2018).
- APM Planner 2. Available online: http://ardupilot.org/planner2/ (accessed on 15 June 2018).
- UgCS. Available online: https://www.ugcs.com/ (accessed on 15 June 2018).
- Paparazzi UAV. Available online: http://paparazziuav.org/ (accessed on 15 June 2018).
- Buro, M.; Furtak, T. RTS games as test-bed for real-time AI research. In Proceedings of the 7th Joint Conference on Information Science (JCIS 2003), Cary, NC, USA, 26–30 September 2003; Volume 2003, pp. 481–484. [Google Scholar]
- Oliveira, T.; Cruz, G.; Marques, E.; Encarnaçao, P. A test bed for rapid flight testing of UAV control algorithms. In Proceedings of the Workshop on Research, Development and Education on Unmanned Aerial Systems (RED-UAS), Seville, Spain, 30 November–1 December 2011. [Google Scholar]
- Triantaphyllou, E. Multi-Criteria Decision Making Methods: A Comparative Study; Springer: Boston, MA, USA, 2000; p. 290. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Branke, J.; Deb, K.; Dierolf, H.; Osswald, M. Finding knees in multi-objective optimization. In Parallel Problem Solving from Nature—PPSN VIII. PPSN 2004; Lecture Notes in Computer, Science, Yao, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3242, pp. 722–731. [Google Scholar]
- Schulte, C.; Tack, G.; Lagerkvist, M.Z. Modeling and Programming with Gecode. Available online: http://www.gecode.org/ (accessed on 15 June 2018).
- Opricovic, S.; Tzeng, G.H. Compromise solution by MCDM methods: A comparative analysis of VIKOR and TOPSIS. Eur. J. Oper. Res. 2004, 156, 445–455. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relation | Illustration | Interpretation |
|---|---|---|
 | takes place before | |
 | meets | |
 | overlaps | |
 | starts | |
 | during | |
 | finishes | |
 | is equal to |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramirez-Atencia, C.; Camacho, D. Extending QGroundControl for Automated Mission Planning of UAVs. Sensors 2018, 18, 2339. https://doi.org/10.3390/s18072339
Ramirez-Atencia C, Camacho D. Extending QGroundControl for Automated Mission Planning of UAVs. Sensors. 2018; 18(7):2339. https://doi.org/10.3390/s18072339
Chicago/Turabian StyleRamirez-Atencia, Cristian, and David Camacho. 2018. "Extending QGroundControl for Automated Mission Planning of UAVs" Sensors 18, no. 7: 2339. https://doi.org/10.3390/s18072339
APA StyleRamirez-Atencia, C., & Camacho, D. (2018). Extending QGroundControl for Automated Mission Planning of UAVs. Sensors, 18(7), 2339. https://doi.org/10.3390/s18072339