Real-Time Vision-Based Stiffness Mapping †

 , , , ,
, , , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
- Further investigation of the influence of the inclination of the probe on the computation of the stiffness.
- Generation of a colour-coded stiffness map using a magnetic tracking mechanism.
- Evaluation of the sensor performance in robotic palpation.
3. Stiffness Sensor Methodology and Design
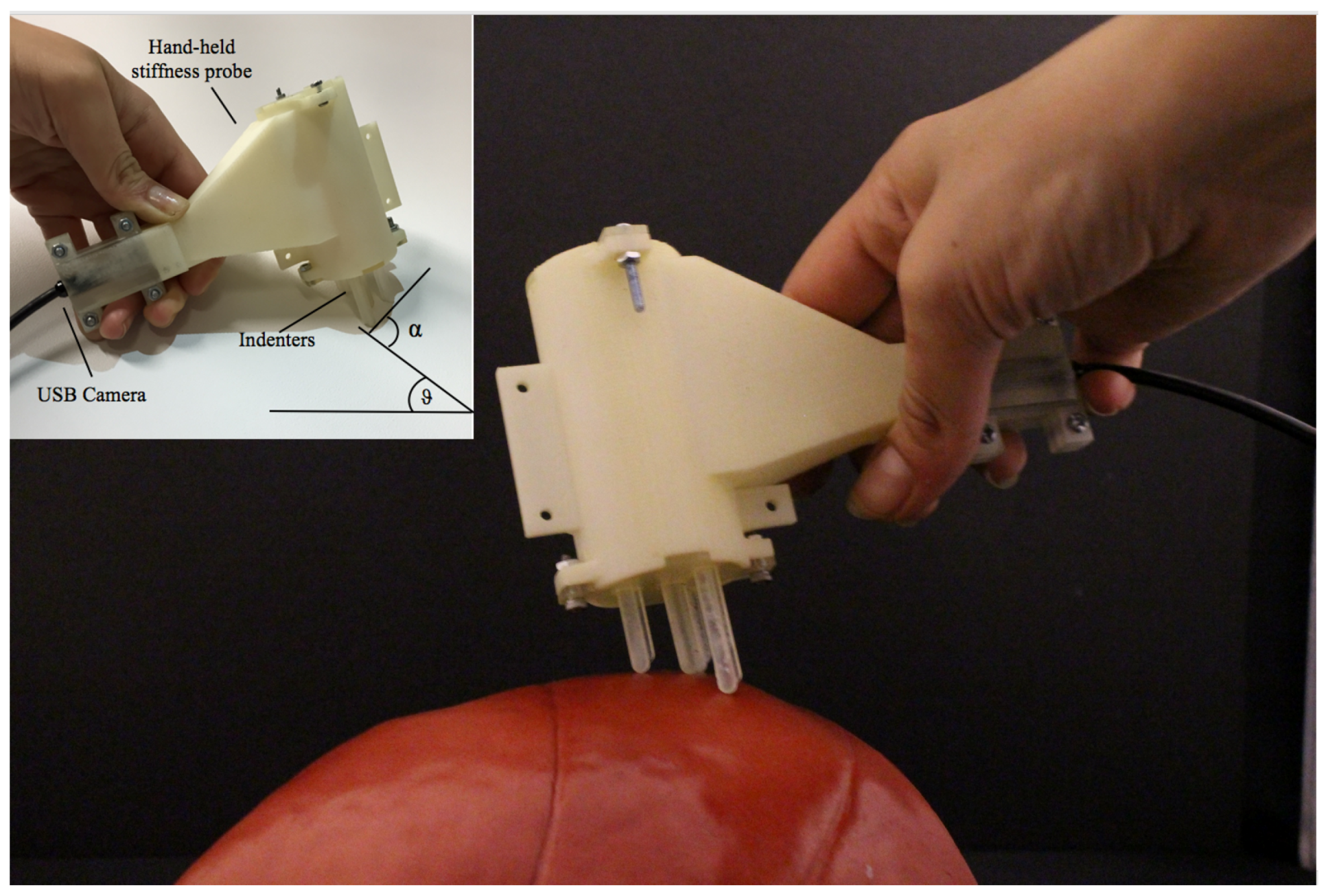
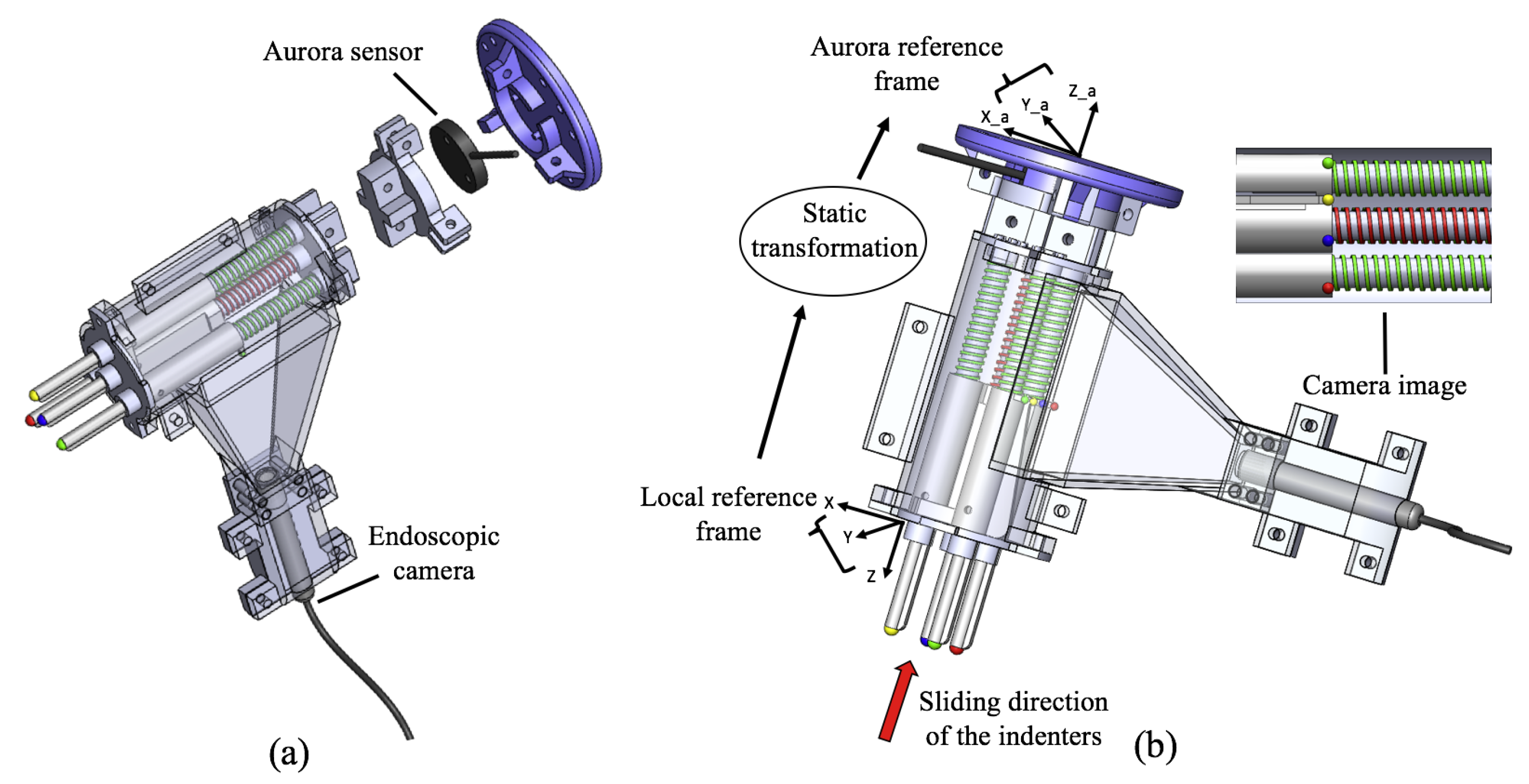
3.1. Mechanical Design
3.2. Image Processing Algorithm
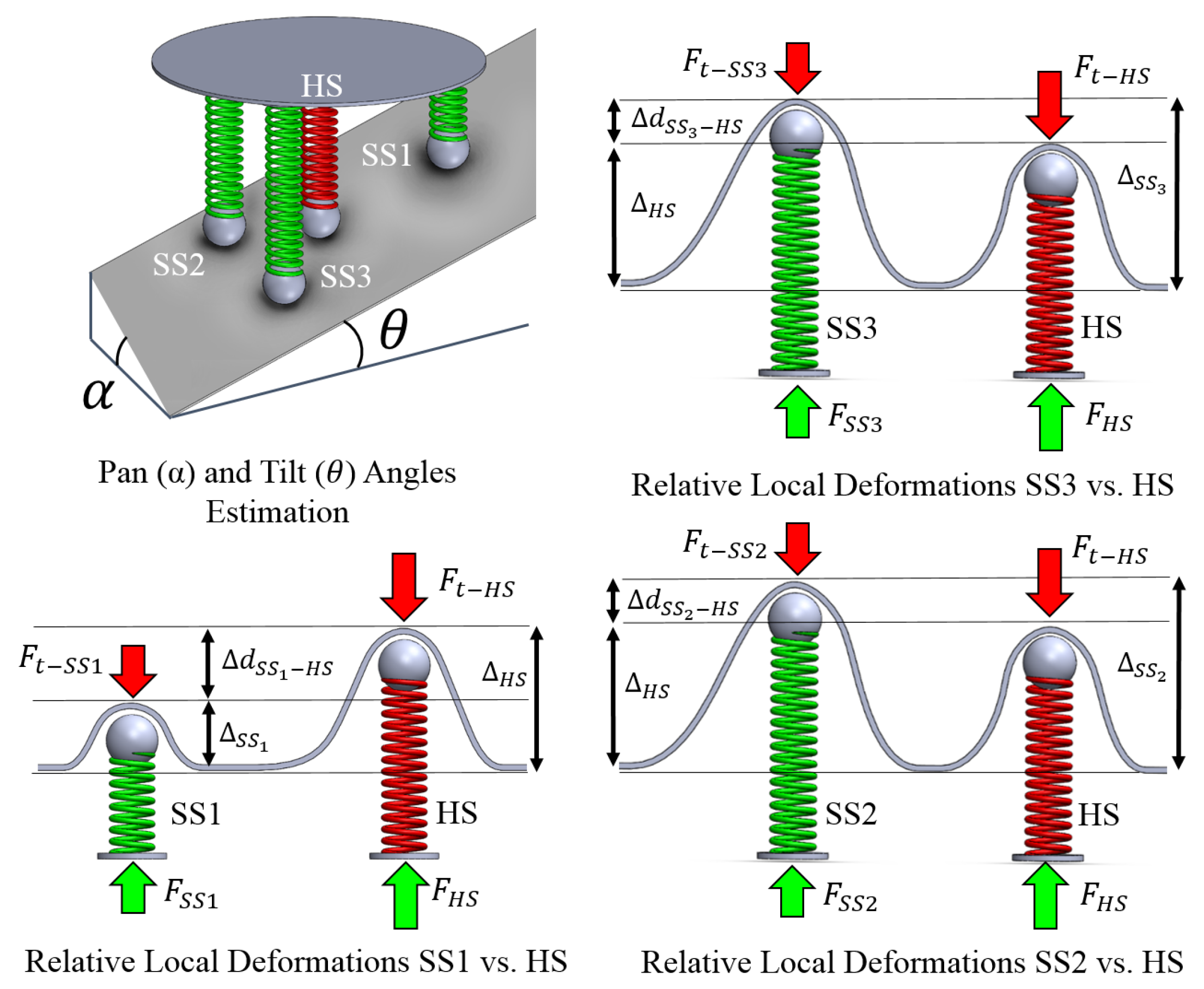
3.3. Spring-Indenter-Feature Analogy
4. Methodology
4.1. Modelling Soft Tissue Properties
4.2. Soft Tissue Characterisation
| Algorithm 1 Iterative procedure solving Equations (1): LMA |
Input: F, the cost function , initial solution Output: , local minimum of F Begin while and do if then else end if end while return End |
5. Real-Time Stiffness Mapping
5.1. Pose Estimation with a Magnetic Motion Tracking System
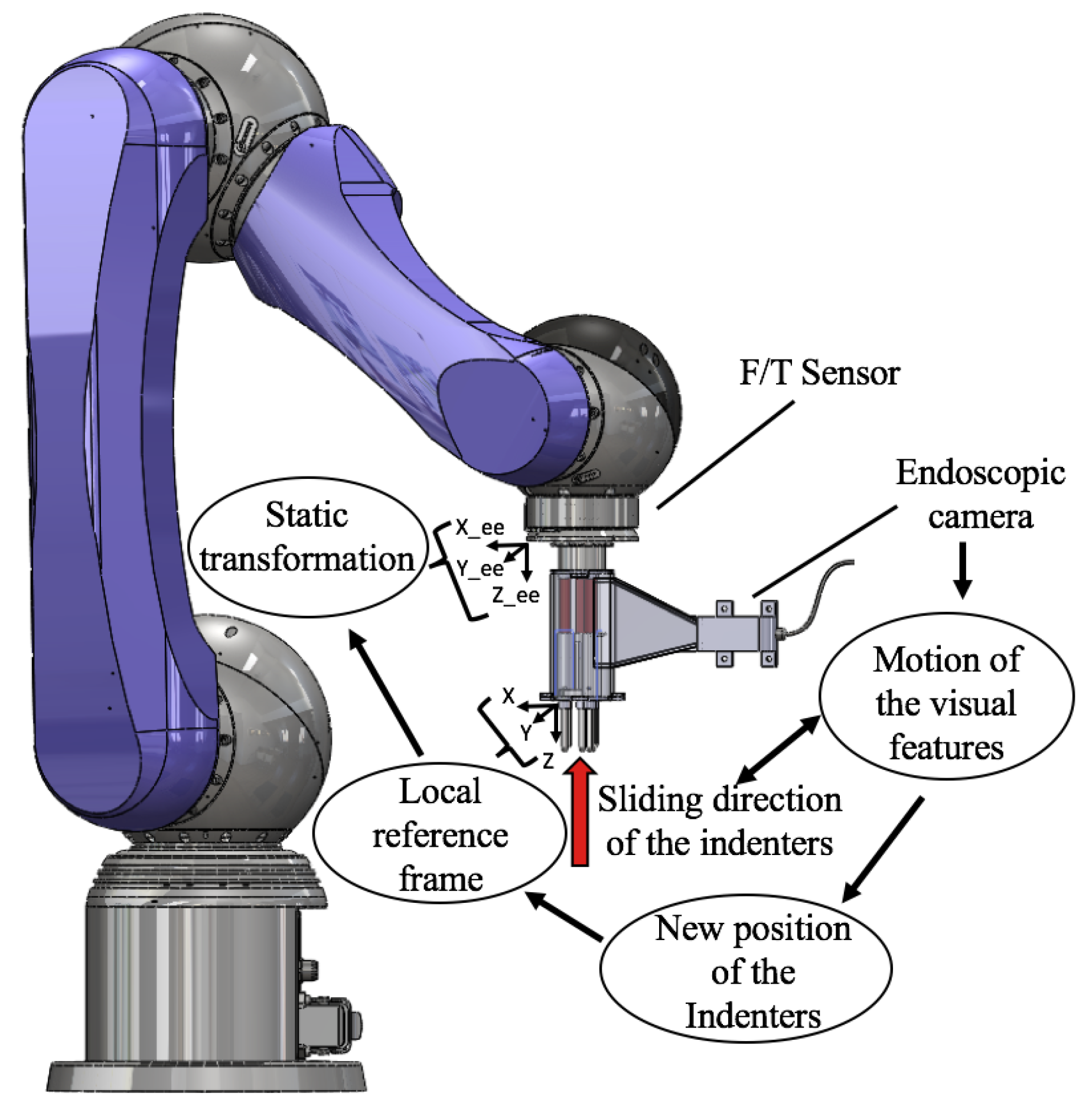
5.2. Pose Estimation with a Fixed Base Robot Arm
6. Experimental Results
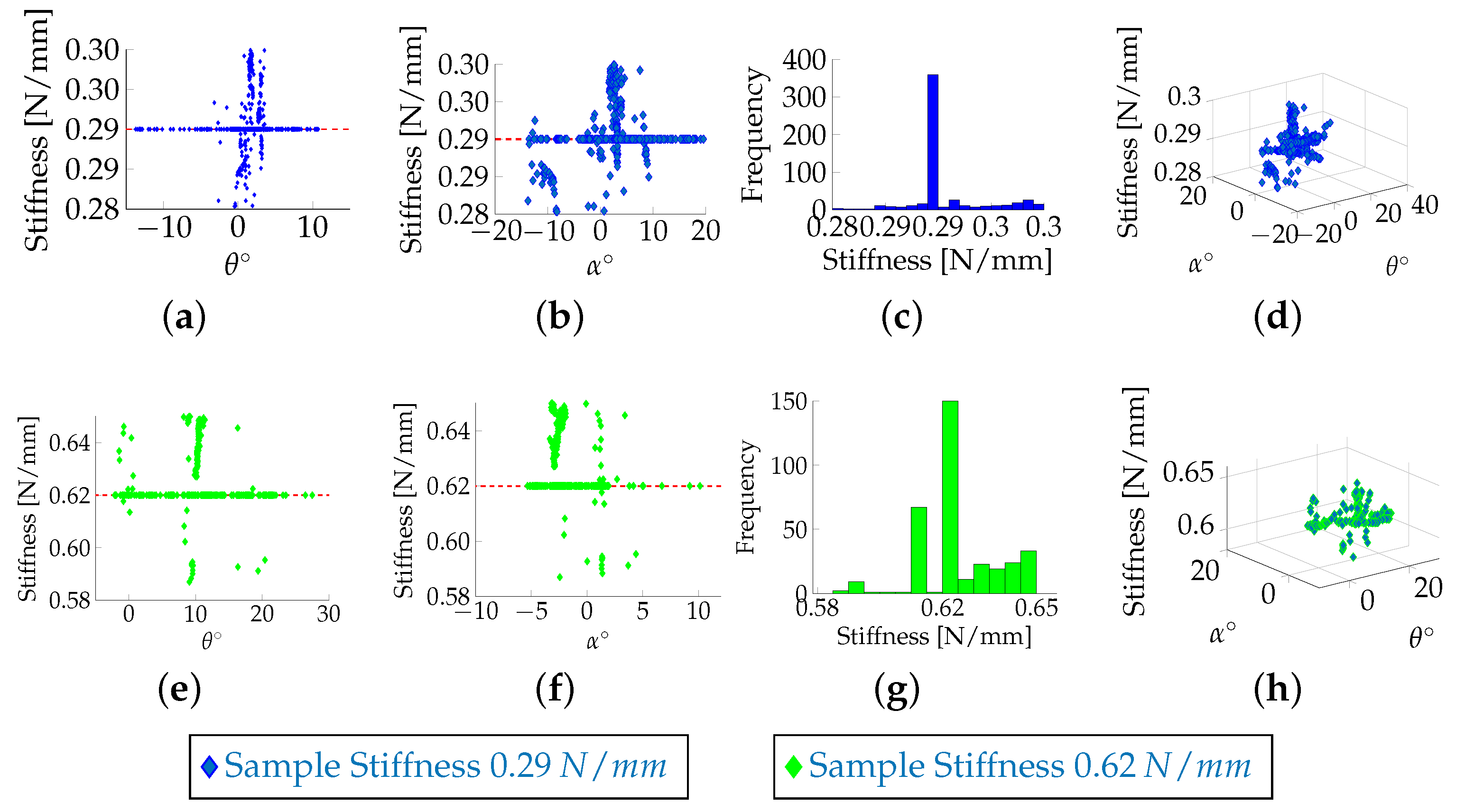
6.1. Evaluation Test with Stiffness Samples
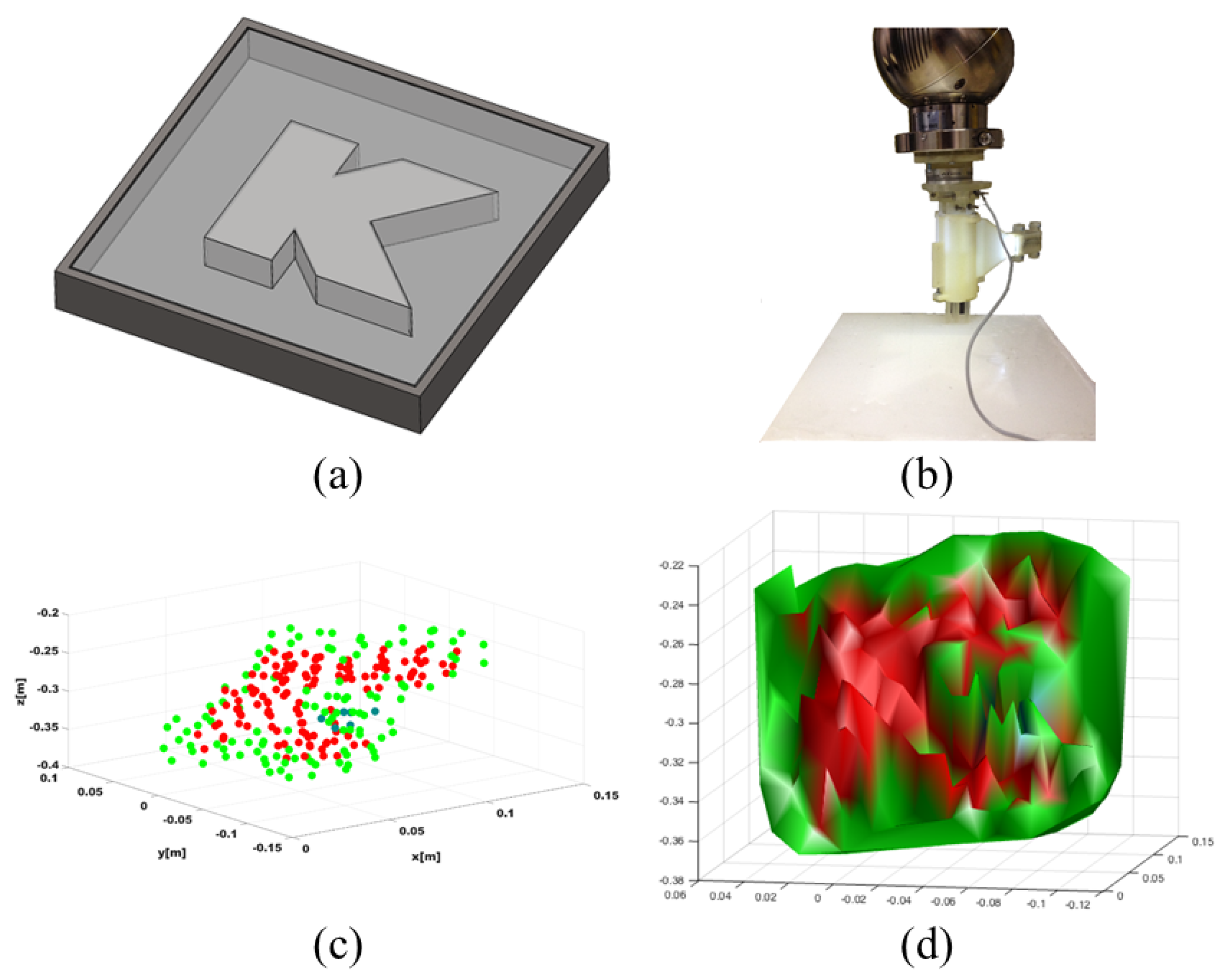
6.2. Stiffness Mapping of Silicone Phantoms
6.2.1. Manual Palpation
6.2.2. Robotic Palpation
7. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Y.; Phillips, R.; Ward, J.; Pisharody, S. A survey of simulators for palpation training. Stud. Health Technol. Inform. 2009, 142, 444–446. [Google Scholar] [PubMed]
- Tan, G.H.; Gharib, H.; Reading, C.C. Solitary thyroid nodule: Comparison between palpation and ultrasonography. Arch. Intern. Med. 1995, 155, 2418–2423. [Google Scholar] [CrossRef] [PubMed]
- Manduca, A.; Oliphant, T.E.; Dresner, M.A.; Mahowald, J.L.; Kruse, S.A.; Amromin, E.; Felmlee, J.P.; Greenleaf, J.F.; Ehman, R.L. Magnetic resonance elastography: Non-invasive mapping of tissue elasticity. Med. Image Anal. 2015, 5, 237–254. [Google Scholar] [CrossRef]
- Henderson, T.O.; Amsterdam, A.; Bhatia, S.; Hudson, M.M.; Meadows, A.T.; Neglia, J.P.; Diller, L.R.; Constine, L.S.; Smith, R.A.; Mahoney, M.C.; et al. Systematic Review: Surveillance for Breast Cancer in Women Treated With Chest Radiation for Childhood, Adolescent, or Young Adult Cancer. Ann. Intern. Med. 2010, 152, 444–455. [Google Scholar] [CrossRef] [PubMed]
- Hughes-Hallett, A.; Mayer, E.K.; Pratt, P.J.; Vale, J.A.; Darzi, A.W. Quantitative analysis of technological innovation in minimally invasive surgery. Br. J. Surg. 2015, 102, 151–157. [Google Scholar] [CrossRef] [PubMed]
- Stanton, T.R.; Kawchuk, G.N. Reliability of assisted indentation in measuring lumbar spinal stiffness. Man. Ther. 2009, 14, 197–205. [Google Scholar] [CrossRef] [PubMed]
- Sarvazyan, A.; Egorov, V.; Sarvazyan, N. Tactile Sensing and Tactile Imaging in Detection of Cancer. Biosens. Mol. Technol. Cancer Diagn. 2012, 339–354. [Google Scholar] [CrossRef]
- Van Veelen, M.A.; Nederlof, E.A.L.; Goossens, R.H.M.; Schot, C.J.; Jakimowicz, J.J. Ergonomic problems encountered by the medical team related to products used for minimally invasive surgery. Surg. Endosc. Other Interv. Tech. 2003, 17, 1077–1081. [Google Scholar] [CrossRef] [PubMed]
- Advincula, A.P.; Wang, K. Evolving Role and Current State of Robotics in Minimally Invasive Gynecologic Surgery. J. Minim. Invasive Gynecol. 2009, 16, 291–301. [Google Scholar] [CrossRef] [PubMed]
- Rosen, J.; Hannaford, B.; MacFarlane, M.P.; Sinanan, M.N. Force controlled and teleoperated endoscopic grasper for minimally invasive surgery—Experimental performance evaluation. IEEE Trans. Biomed. Eng. 1999, 46, 1212–1221. [Google Scholar] [CrossRef] [PubMed]
- Trejos, A.L.; Patel, R.V.; Naish, M.D. Force sensing and its application in minimally invasive surgery and therapy: A survey. Proc. Inst. Mech. Eng. Part C. J. Mech. Eng. Sci. 2010, 224, 1435–1454. [Google Scholar] [CrossRef]
- Fung, Y.C. Biomechanics: Mechanical Properties of Living Tissues; Springer: Heidelberg/Berlin, Germany, 1993. [Google Scholar]
- Hosseini, S.M.; Kashani, S.M.T.; Najarian, S.; Panahi, F.; Naeini, S.M.M.; Mojra, A. A medical tactile sensing instrument for detecting embedded objects, with specific application for breast examination. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 73–82. [Google Scholar] [CrossRef] [PubMed]
- Bizzini, M.; Mannion, A.F. Reliability of a new, hand-held device for assessing skeletal muscle stiffness. Clin. Biomech. 2003, 18, 459–461. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; Song, X.; Seneviratne, L.; Althoefer, K. Rolling Indentation Probe for Tissue Abnormality Identification During Minimally Invasive Surgery. IEEE Trans. Robot. 2011, 27, 450–460. [Google Scholar] [CrossRef]
- Liu, H.; Noonan, D.P.; Challacombe, B.J.; Dasgupta, P.; Seneviratne, L.D.; Althoefer, K. Rolling mechanical imaging for tissue abnormality localization during minimally invasive surgery. IEEE Trans. Biomed. Eng. 2010, 57, 404–414. [Google Scholar] [PubMed]
- Faragasso, A.; Bimbo, J.; Noh, Y.; Wurdemann, H.A.; Sareh, S.; Liu, H.; Nanayakkara, T.; Althoefer, K. Novel Uniaxial Force Sensor based on Visual Information for Minimally Invasive Surgery. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Faragasso, A.; Stilli, A.; Bimbo, J.; Noh, Y.; Liu, H.; Nanayakkara, T.; Dasgupta, P.; Wurdemann, H.A.; Althoefer, K. Endoscopic Add-on Stiffness Probe for Real-time Soft Surface Characterisation in MIS. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Chicago, IL, USA, 26–30 August 2014. [Google Scholar]
- Faragasso, A.; Stilli, A.; Bimbo, J.; Wurdemann, H.A.; Althoefer, K. Multi-axis Stiffness Sensing Device for Medical Palpation. In Proceedings of the 2015 IIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September 28–2 October 2015. [Google Scholar]
- Lourakis, M.I.A. A Brief Description of the Levenberg–Marquardt Algorithm Implemened by levmar. Matrix 2005, 3, 2. [Google Scholar]
- Bettess, P. The finite element method Vol. 1: Basic formulation and linear problems, Fourth Edition by O. C. Zienkiewicz and R. L. Taylor, McGraw-Hill, Maidenhead, England, 1989. No. of pages: 648. Int. J. Numer. Methods Eng. 1990, 30, 565–567. [Google Scholar] [CrossRef]
- Laugier, C.; Mendoza, C.; Sundaraj, K. Towards a Realistic Medical Simulator using Virtual Environments and Haptic Interaction. Robot. Res. 2003, 6, 289–306. [Google Scholar]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faragasso, A.; Bimbo, J.; Stilli, A.; Wurdemann, H.A.; Althoefer, K.; Asama, H. Real-Time Vision-Based Stiffness Mapping †. Sensors 2018, 18, 1347. https://doi.org/10.3390/s18051347
Faragasso A, Bimbo J, Stilli A, Wurdemann HA, Althoefer K, Asama H. Real-Time Vision-Based Stiffness Mapping †. Sensors. 2018; 18(5):1347. https://doi.org/10.3390/s18051347
Chicago/Turabian StyleFaragasso, Angela, João Bimbo, Agostino Stilli, Helge Arne Wurdemann, Kaspar Althoefer, and Hajime Asama. 2018. "Real-Time Vision-Based Stiffness Mapping †" Sensors 18, no. 5: 1347. https://doi.org/10.3390/s18051347
APA StyleFaragasso, A., Bimbo, J., Stilli, A., Wurdemann, H. A., Althoefer, K., & Asama, H. (2018). Real-Time Vision-Based Stiffness Mapping †. Sensors, 18(5), 1347. https://doi.org/10.3390/s18051347