An Adaptive Trajectory Clustering Method Based on Grid and Density in Mobile Pattern Analysis

Abstract
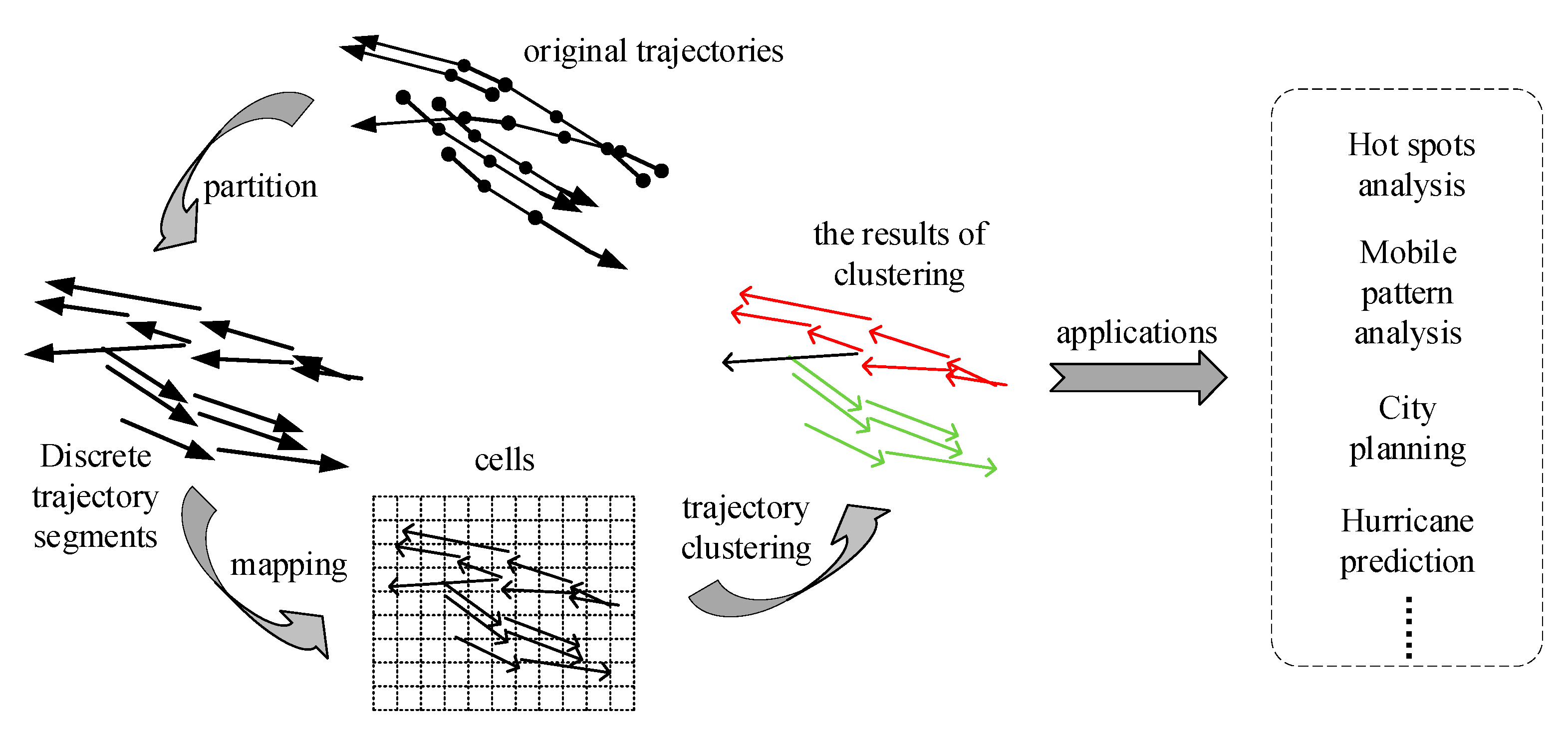
:1. Introduction
2. Related Work
2.1. Trajectory Clustering Approaches
2.2. Trajectory Partition Methods
3. Discrete Partitioning of Trajectories
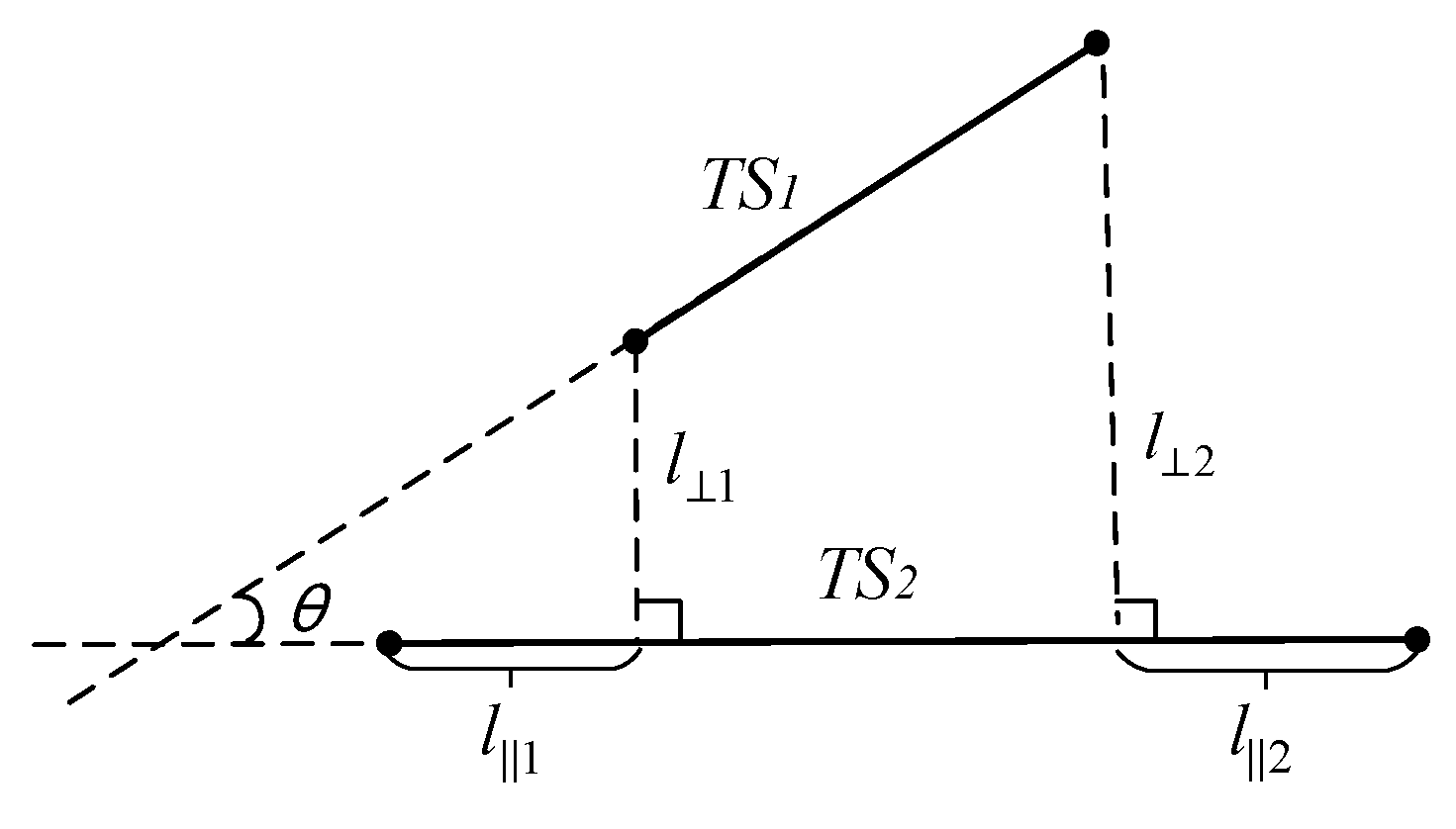
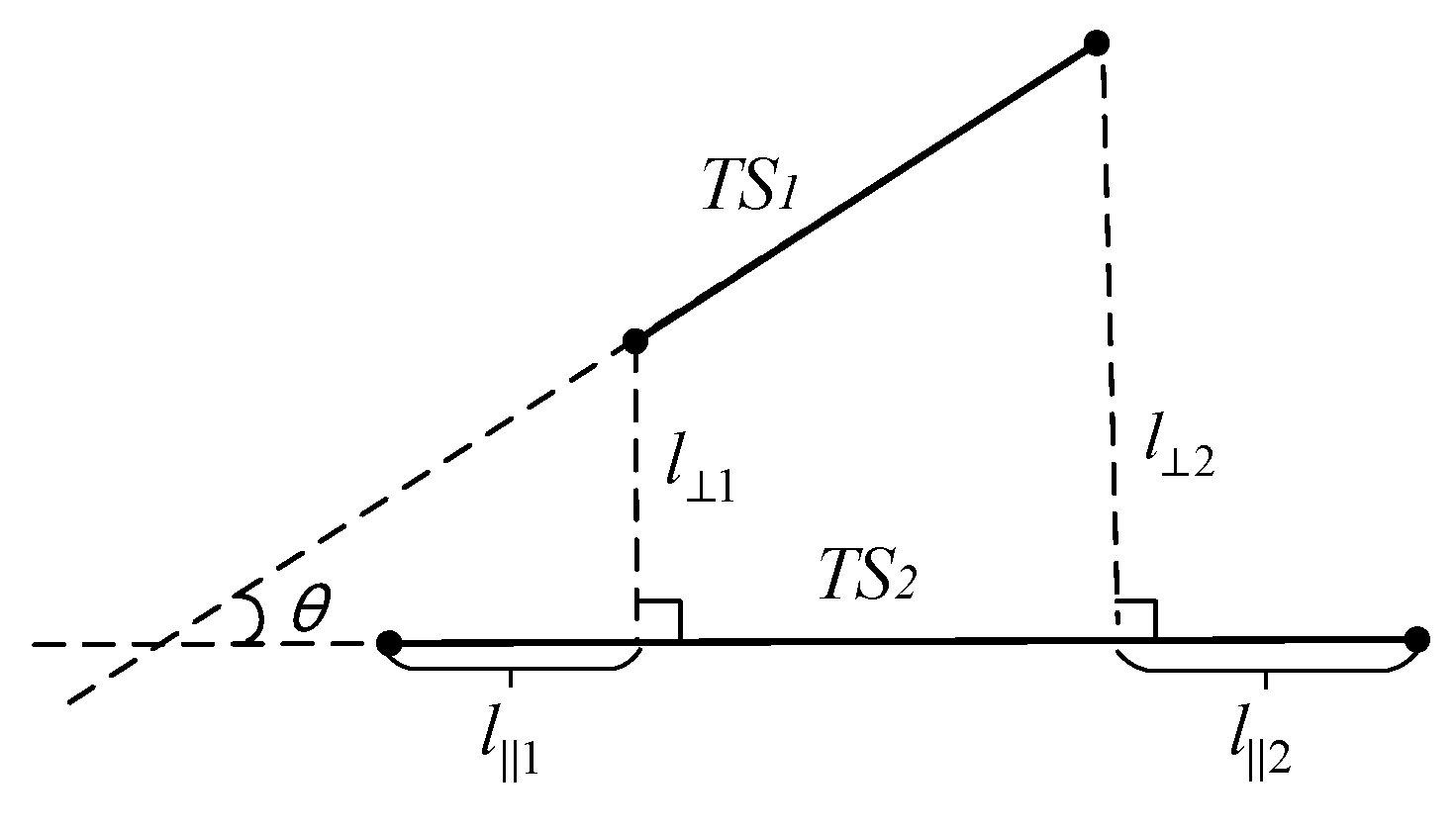
3.1. Distance Measure Between the Trajectory Segments
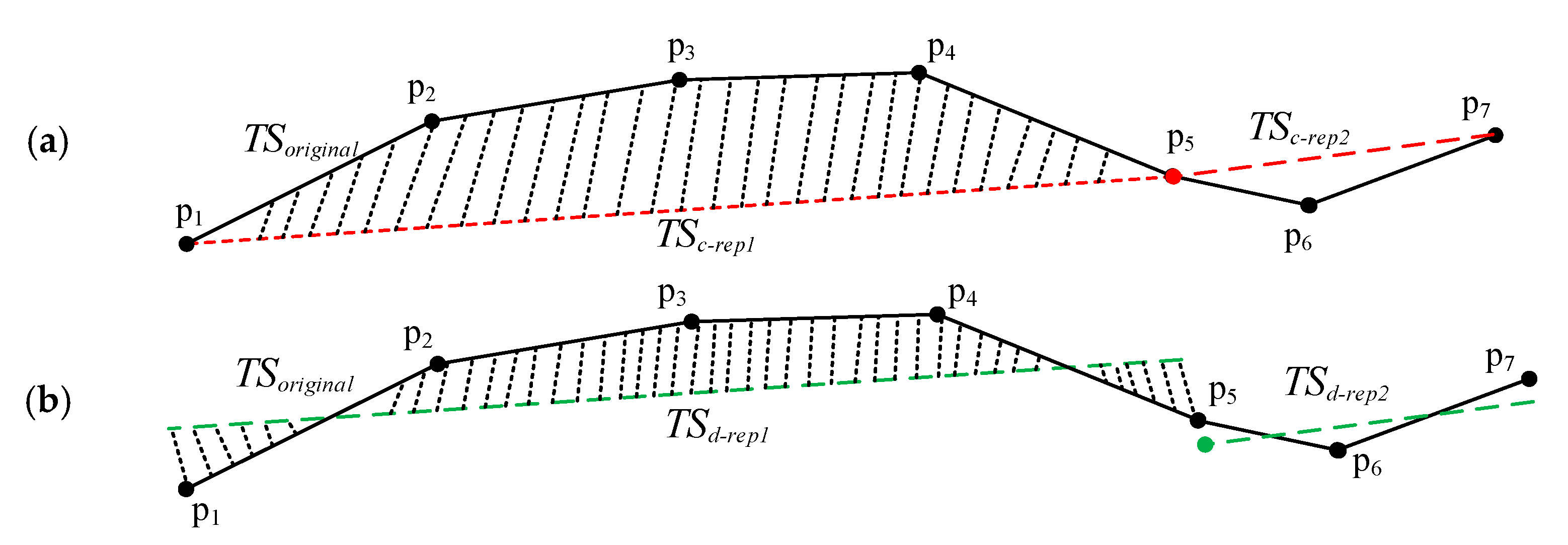
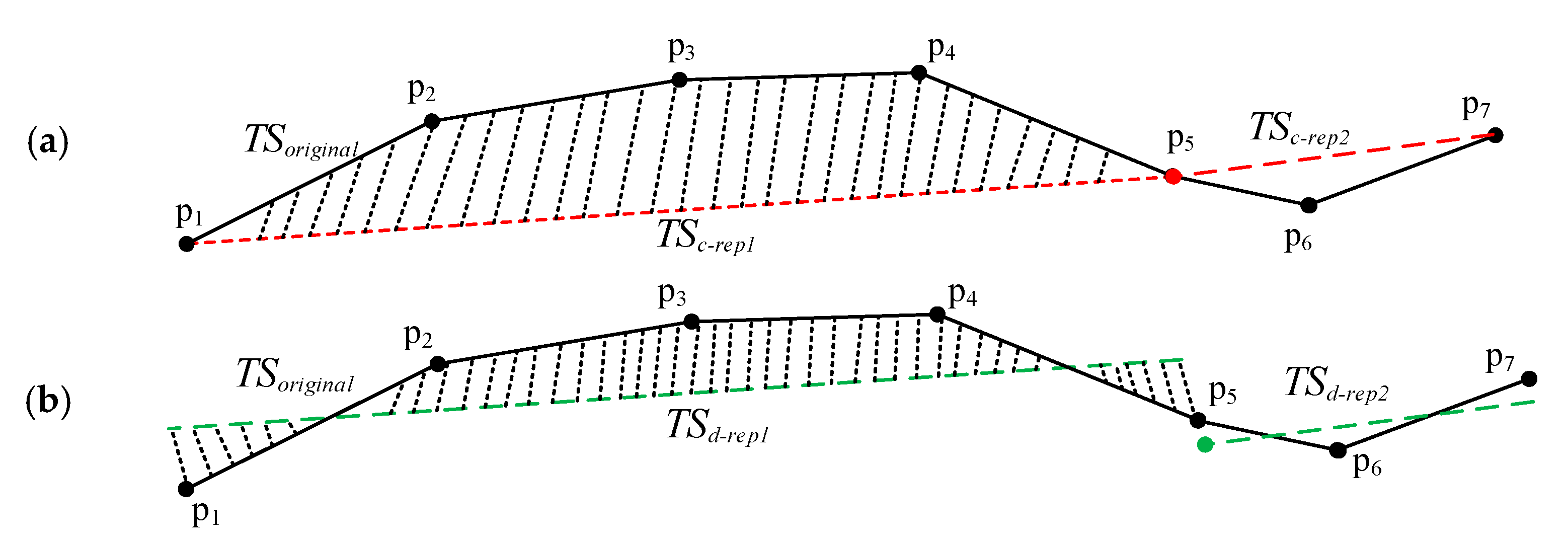
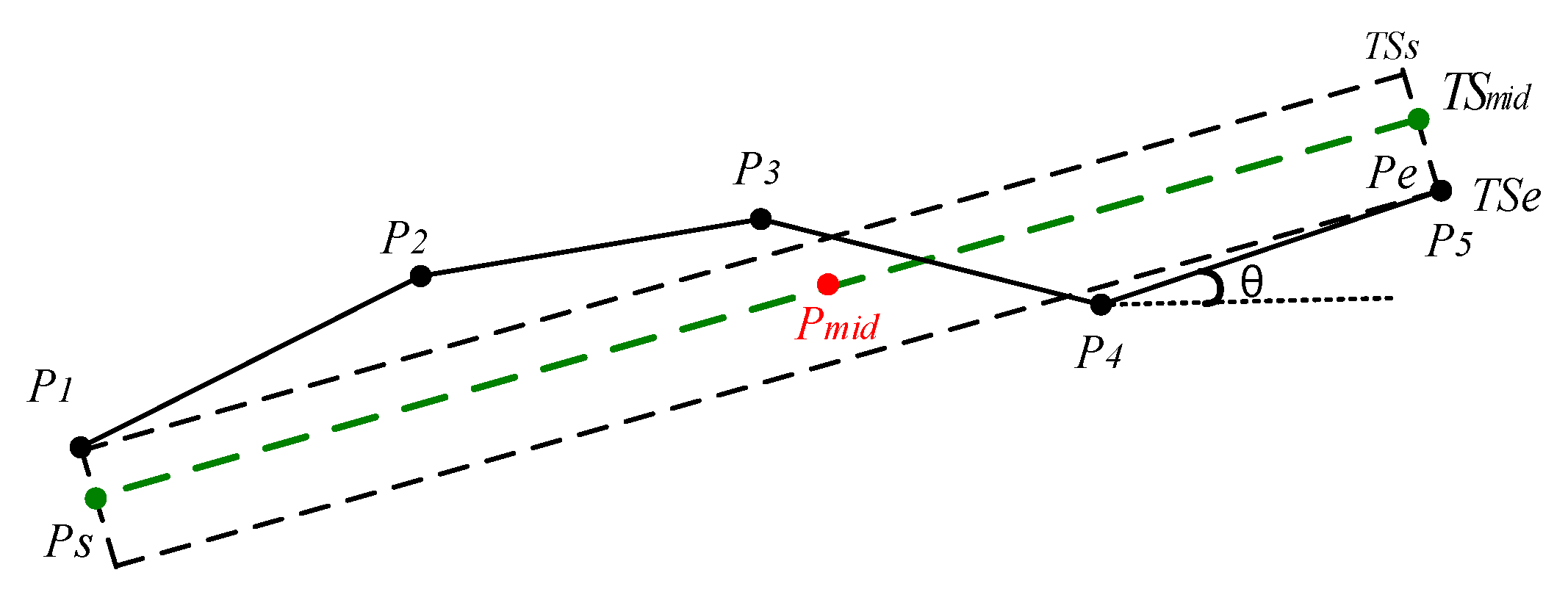
3.2. Discrete Representative Trajectory Segments
3.3. Discrete Trajectory Partition Algorithm
| Algorithm 1. AD-MDL: The Average Angular Difference-Based MDL Trajectories Partition Algorithm. |
|
4. Trajectory Clustering Based on Grid and Density
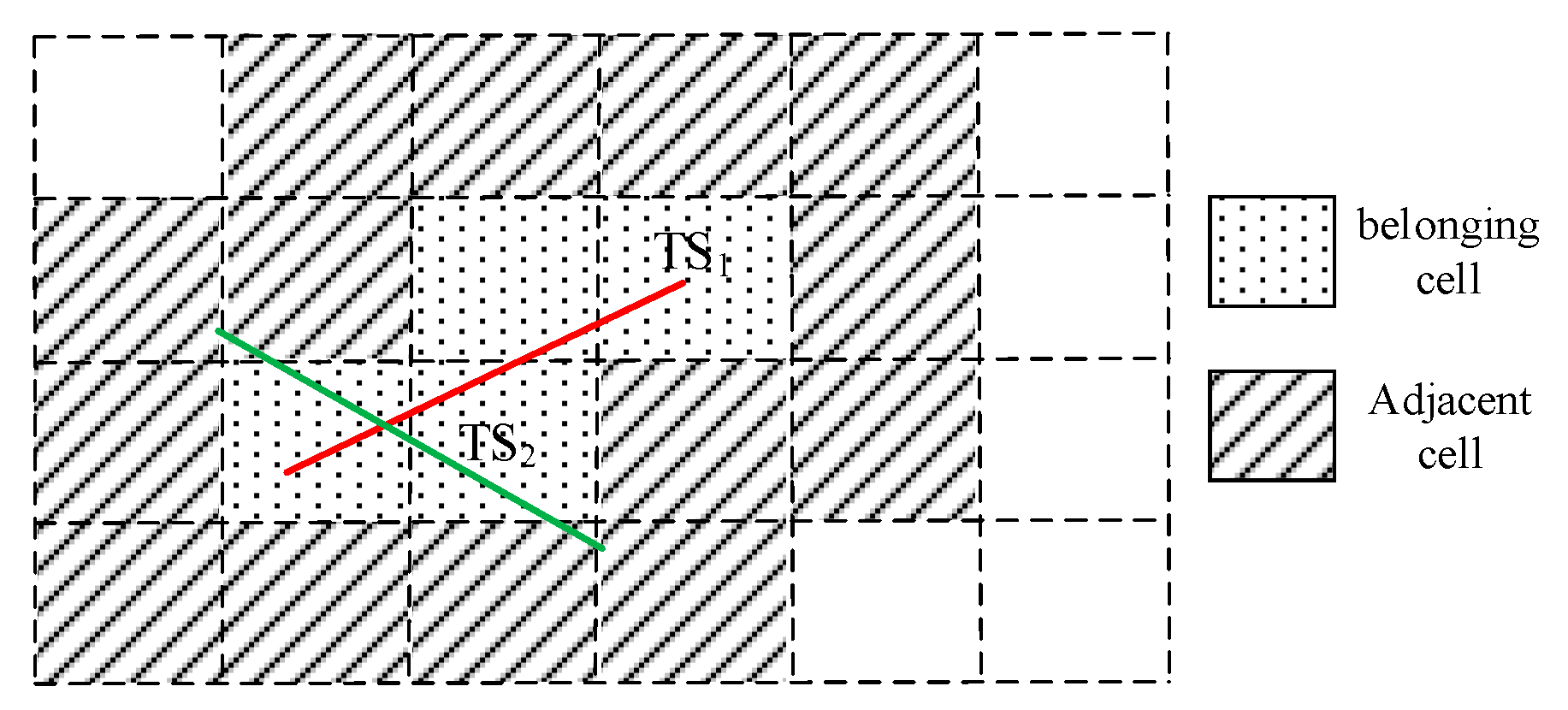
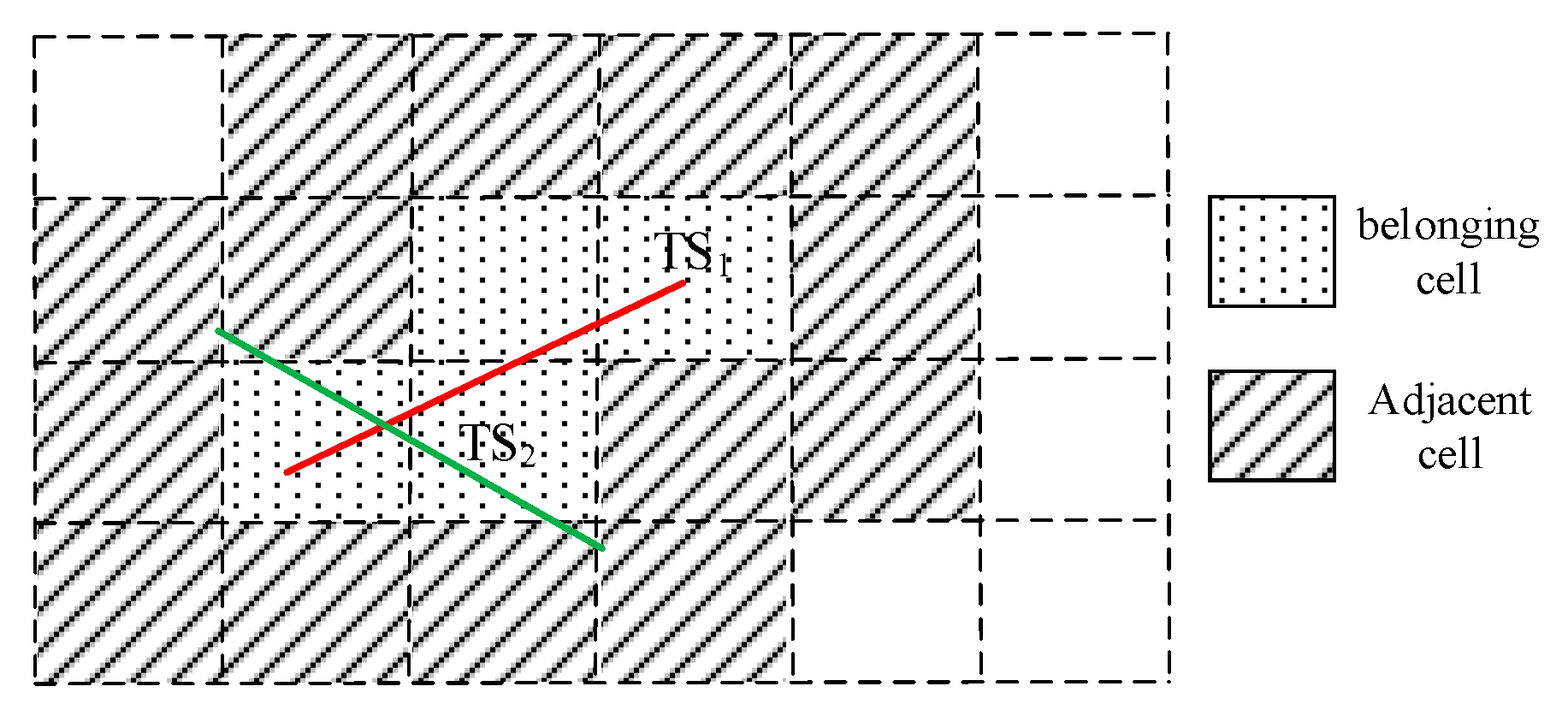
4.1. Grid Partition
4.2. Trajectory Clustering Algorithm
| Algorithm 2. The Density-Based Trajectory Clustering Algorithm. |
|
5. Performance Evaluation
5.1. Experimental Setup
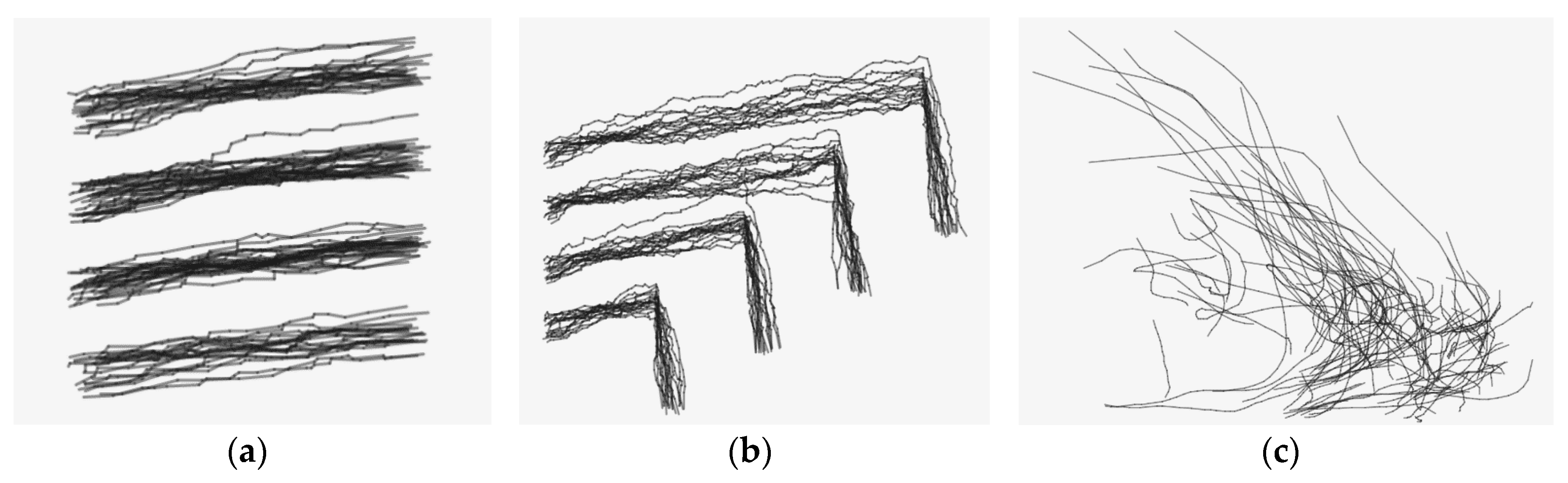
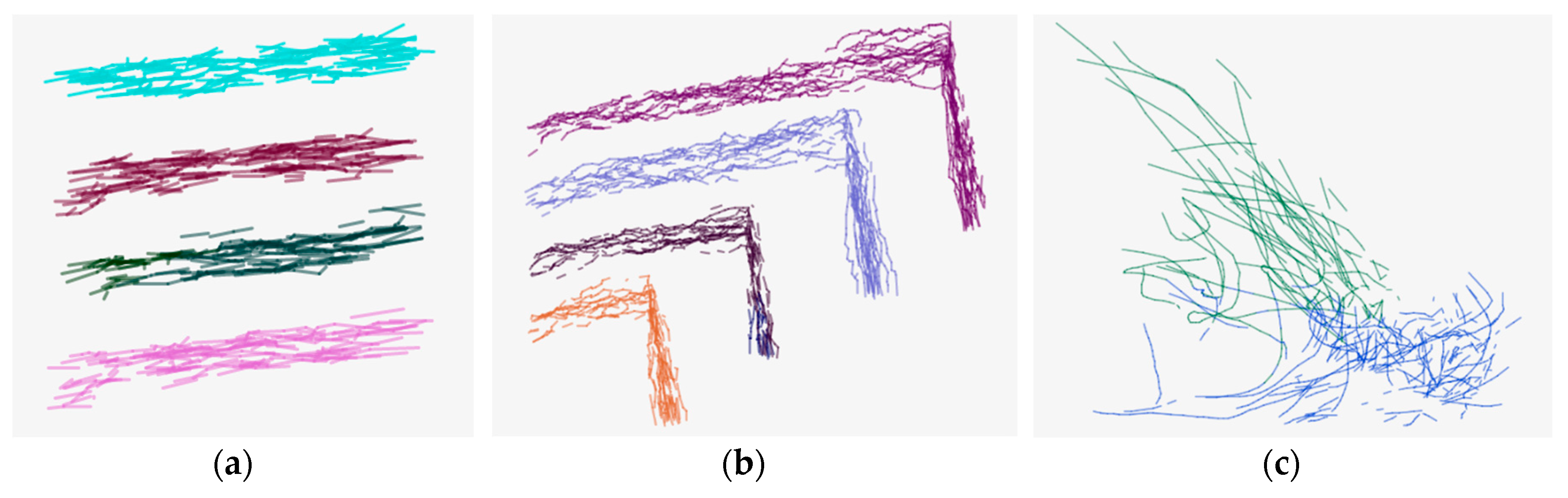
5.2. Clustering Performance
5.3. Comparison Analysis
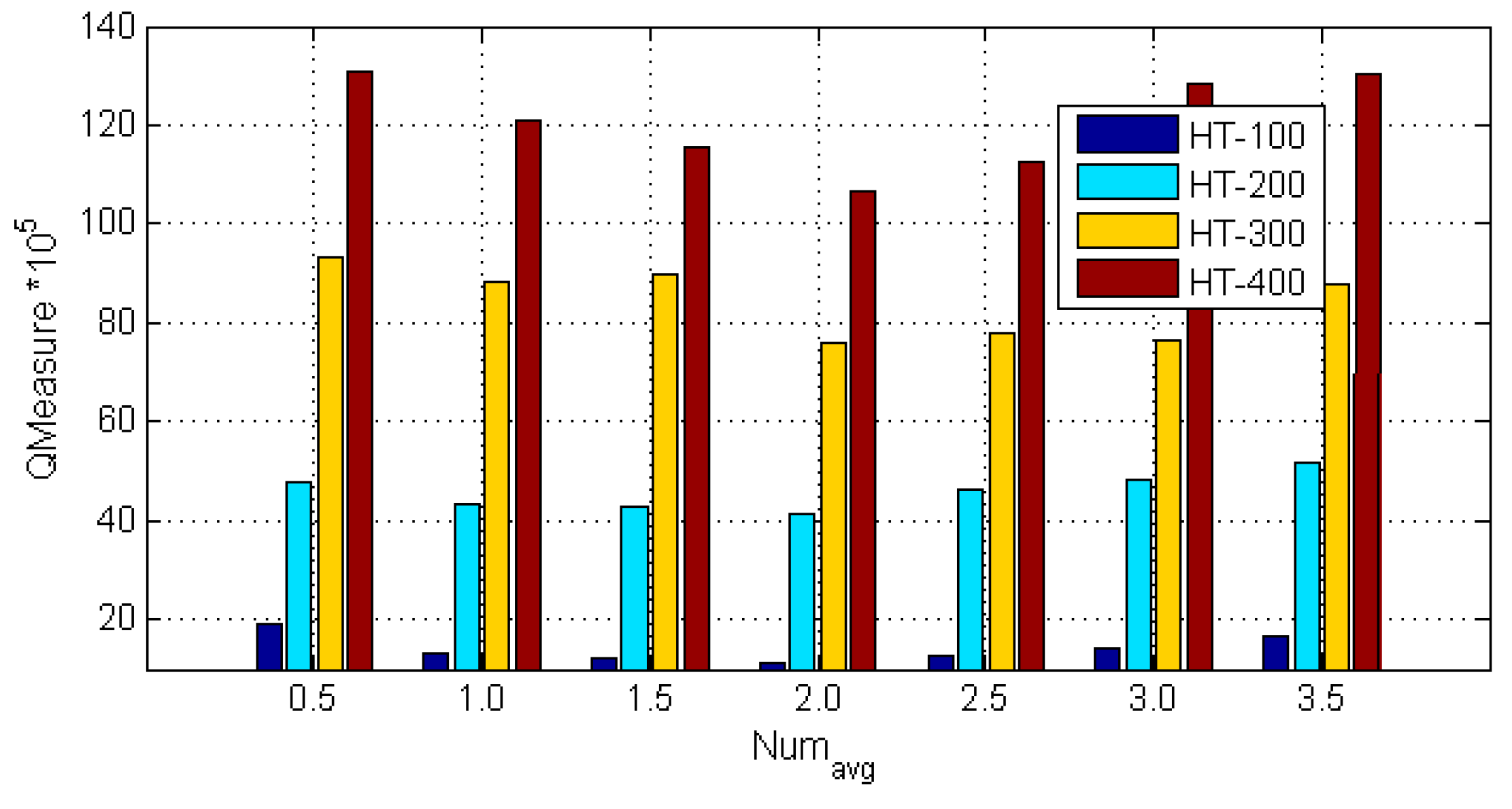
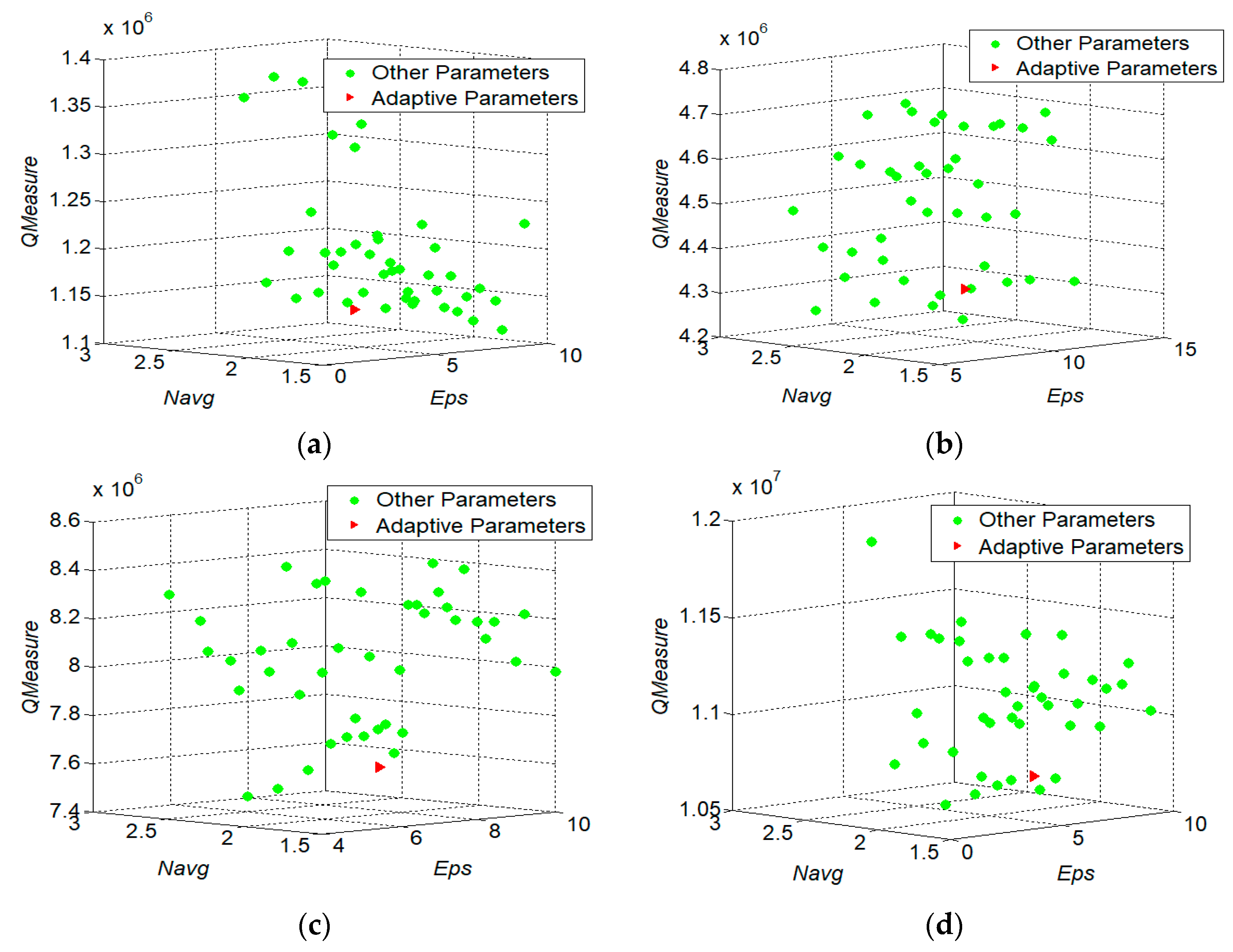
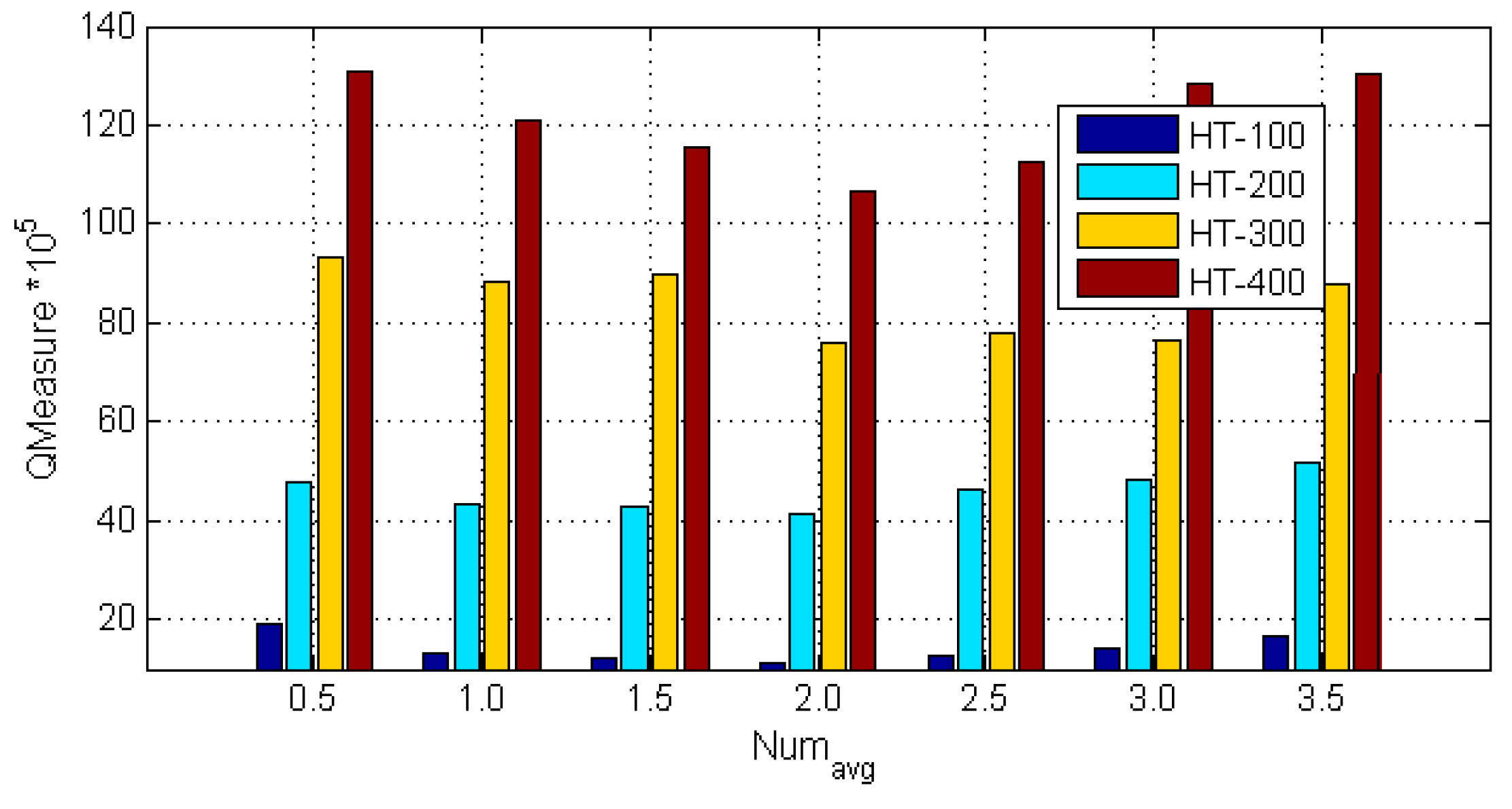
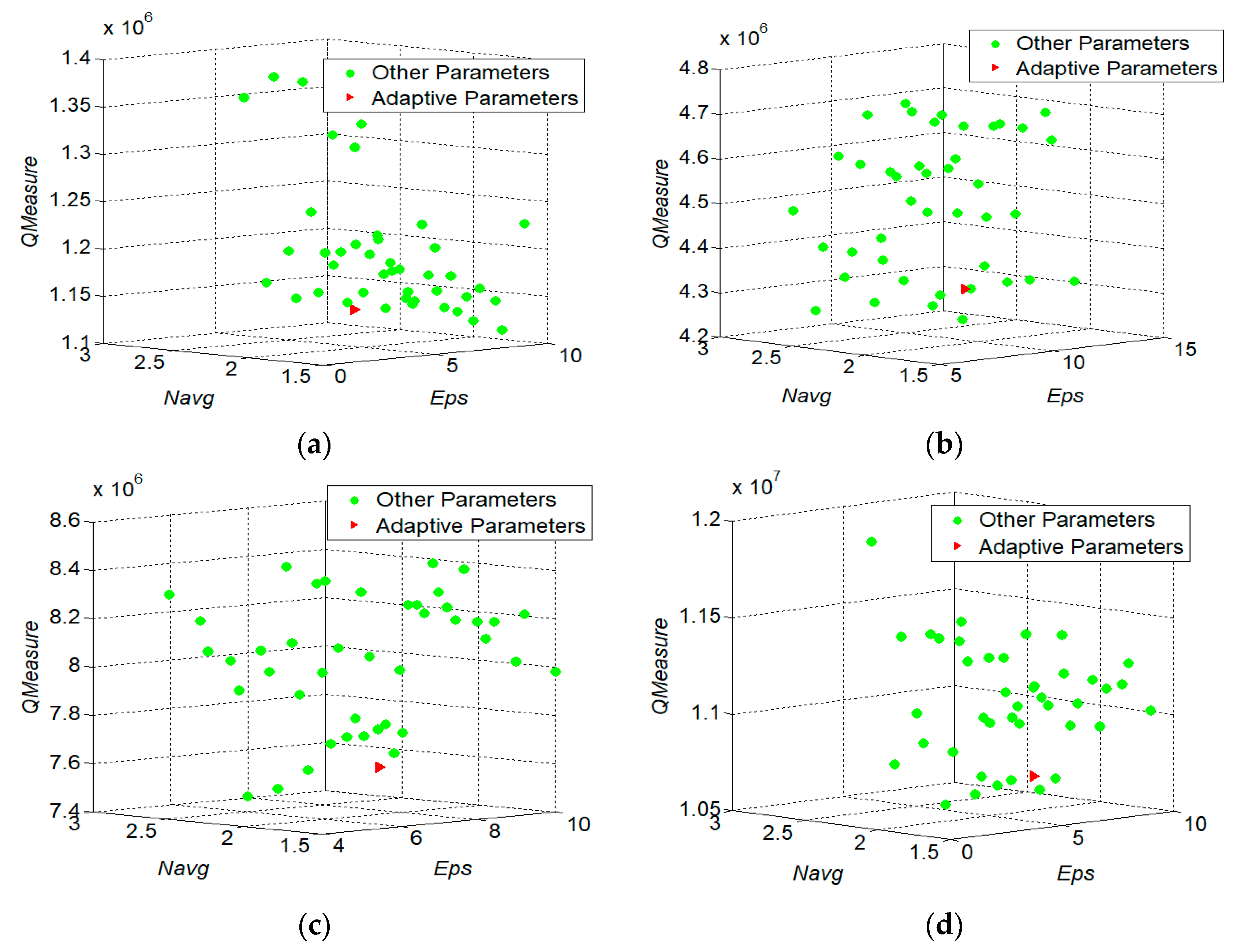
5.4. Parameter Sensitive Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Melnychuk, M.C.; Welch, D.W.; Walters, C.J. Spatio-temporal migration patterns of Pacific salmon smolts in rivers and coastal marine waters. PLoS ONE 2010, 5, e12916. [Google Scholar] [CrossRef] [PubMed]
- Andraca-Gómez, G.; Ordano, M.; Boege, K.; Domínguez, C.A.; Piñero, D.; Pérez-Ishiwara, R.; Pérez-Camacho, J.; Cañizares, M.; Fornoni, J. A potential invasion route of Cactoblastis cactorum within the Caribbean region matches historical hurricane trajectories. Biol. Invasions 2015, 17, 1397–1406. [Google Scholar] [CrossRef]
- Yuan, J.; Zheng, Y.; Zhang, C.; Xie, W.; Xie, X.; Sun, G.; Huang, Y. T-drive: Driving directions based on taxi trajectories. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 3–5 November 2010; pp. 99–108. [Google Scholar]
- Serna, C.G.; Ruichek, Y. Dynamic Speed Adaptation for Pat Tracking Based on Curvature Information and Speed Limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef] [PubMed]
- Yue, Y.; Zhuang, Y.; Li, Q.; Mao, Q. Mining Time-dependent Attractive Areas and Movement Patterns from Taxi Trajectory Data. In Proceedings of the 2009 International Conference on Geoinformatics, Fairfax, VA, USA, 12–14 August 2009; pp. 1–6. [Google Scholar]
- Liu, S.; Liu, Y.; Ni, L.M.; Fan, J.; Li, M. Towards mobility-based clustering. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, 25–28 July 2010; pp. 919–928. [Google Scholar]
- Ma, L.B.; Li, P. Spatio-temporal Trajectory Clustering Based on Automatic Subspace Clustering Algorithm. Geogr. Geo-Inf. Sci. 2014, 30, 7–11. [Google Scholar]
- Gaffney, S.; Smyth, P. Trajectory clustering with mixtures of regression models. In Proceedings of the Fifth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Diego, CA, USA, 15–18 August 1999; pp. 63–72. [Google Scholar]
- Nanni, M.; Pedreschi, D. Time-focused clustering of trajectories of moving objects. J. Intell. Inf. Syst. 2006, 27, 267–289. [Google Scholar] [CrossRef]
- Kalnis, P.; Mamoulis, N.; Bakiras, S. On discovering moving clusters in spatio-temporal data. In Proceedings of the International Symposium on Spatial and Temporal Databases, Angra dos Reis, Brazil, 22–24 August 2005; pp. 364–381. [Google Scholar]
- Lee, J.G.; Han, J.; Whang, K.Y. Trajectory clustering: A partition-and-group framework. In Proceedings of the ACM SIGMOD International Conference on Management of Data, Beijing, China, 11–14 June 2007; pp. 593–604. [Google Scholar]
- Ram, A.; Sharma, A.; Jalal, A.S.; Agrawal, A.; Singh, R. An Enhanced Density Based Spatial Clustering of Applications with Noise. In Proceedings of the IACC 2009, IEEE International Advance Computing Conference, Patiala, India, 6–7 March 2009; pp. 1475–1478. [Google Scholar]
- Peng, C.; Guoyou, S.; Shuang, L.; Jian, Y. An incremental density based spatial clustering of application with noise algorithm based on partition index. J. Comput. Theor. Nanosci. 2016, 13, 10273–10280. [Google Scholar] [CrossRef]
- Hassanin, M.F.; Hassan, M.; Shoeb, A. DDBSCAN: Different Densities-Based Spatial Clustering of Applications with Noise. In Proceedings of the International Conference on Control, Instrumentation, Communication and Computational Technologies, Kumaracoil, India, 18–19 December 2015. [Google Scholar]
- Xia, L.N.; Jing, J.W. SA-DBSCAN: A self-adaptive density-based clustering algorithm. J. Grad. Sch. Chin. Acad. Sci. 2009, 26, 530–538. [Google Scholar]
- Chen, X.; Liu, W.; Qiu, H.; Lai, J. APSCAN: A parameter free algorithm for clustering. Pattern Recognit. Lett. 2011, 32, 973–986. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, Z.; Si, F. GCMDDBSCAN: Multi-density DBSCAN Based on Grid and Contribution. In Proceedings of the International Conference on Dependable, Autonomic and Secure Computing, Chengdu, China, 21–22 December 2013; pp. 502–507. [Google Scholar]
- Li, Z.; Lee, J.G.; Li, X.; Han, J. Incremental clustering for trajectories. In Proceedings of the 15th International Conference on Database Systems for Advanced Applications, Tsukuba, Japan, 1–4 April 2010; pp. 32–46. [Google Scholar]
- Khairat, H.; Sitanggang, I.S.; Nuryanto, D.E. Clustering Haze Trajectory of Peatland Fires in Riau Province Using K-Means Algorithm. EES 2017, 58, 012059. [Google Scholar] [CrossRef]
- Li, J.; Yang, M.; Liu, N.; Wang, Z.; Yu, L. A Trajectory Data Clustering Method Based on Dynamic Grid Density. Int. J. Grid Distrib. Comput. 2015, 8, 1–8. [Google Scholar] [CrossRef]
- Ebisch, K. Short Note: A Correction to Douglas-Peucker Line Generalization Algorithm. Comput. Geosci. 2002, 28, 995–997. [Google Scholar] [CrossRef]
- Meratnia, N.; Rolf, A. Spatiotemporal compression techniques for moving point objects. In Proceedings of the 9th International Conference on Extending Database Technology, Crete, Greece, 14–18 March 2004; pp. 765–782. [Google Scholar]
- Muckell, J.; Olsen, P.W.; Hwang, J.H.; Lawson, C.T.; Ravi, S.S. Compression of trajectory data: A comprehensive evaluation and new approach. GeoInformatica 2014, 18, 435–460. [Google Scholar] [CrossRef]
- Zheng, Y.; Xie, X.; Ma, W.Y. GeoLife: A Collaborative Social Networking Service among User, Location and Trajectory. IEEE Data Eng. Bull. 2010, 33, 32–39. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TRACLUS | ATCGD | |||
|---|---|---|---|---|
| QMeasure | Run Time (s) | QMeasure | Run Time (s) | |
| HT-100 | 1,486,875 | 1.25 | 1,140,856 | 0.14 |
| HT-200 | 5,416,222 | 5.84 | 4,327,626 | 0.23 |
| HT-300 | 8,164,510 | 15.75 | 7,602,455 | 0.44 |
| HT-400 | 9,741,195 | 26.34 | 10,682,513 | 0.61 |
| RT1 | 461,437 | 1.07 | 39,426 | 0.09 |
| RT2 | 164,351 | 21.75 | 176,269 | 0.57 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Y.; Zhong, H.; Qi, H.; Ping, P.; Li, X. An Adaptive Trajectory Clustering Method Based on Grid and Density in Mobile Pattern Analysis. Sensors 2017, 17, 2013. https://doi.org/10.3390/s17092013
Mao Y, Zhong H, Qi H, Ping P, Li X. An Adaptive Trajectory Clustering Method Based on Grid and Density in Mobile Pattern Analysis. Sensors. 2017; 17(9):2013. https://doi.org/10.3390/s17092013
Chicago/Turabian StyleMao, Yingchi, Haishi Zhong, Hai Qi, Ping Ping, and Xiaofang Li. 2017. "An Adaptive Trajectory Clustering Method Based on Grid and Density in Mobile Pattern Analysis" Sensors 17, no. 9: 2013. https://doi.org/10.3390/s17092013
APA StyleMao, Y., Zhong, H., Qi, H., Ping, P., & Li, X. (2017). An Adaptive Trajectory Clustering Method Based on Grid and Density in Mobile Pattern Analysis. Sensors, 17(9), 2013. https://doi.org/10.3390/s17092013