
Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems

Abstract
:1. Introduction
2. Problem Statement
2.1. UWB Ranging System Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Channel Model | Channel Model Description |
|---|---|
| CM1 | LOS of indoor residential (7~20 m) |
| CM2 | NLOS of indoor residential (7~20 m) |
| CM3 | LOS of indoor office (3~28 m) |
| CM4 | NLOS of indoor office (3~28 m) |
| CM5 | LOS of outdoor (5~17 m) |
| CM6 | NLOS of outdoor (5~17 m) |
| CM7 | LOS of industrial (2~8 m) |
| CM8 | NLOS of industrial (2~8 m) |
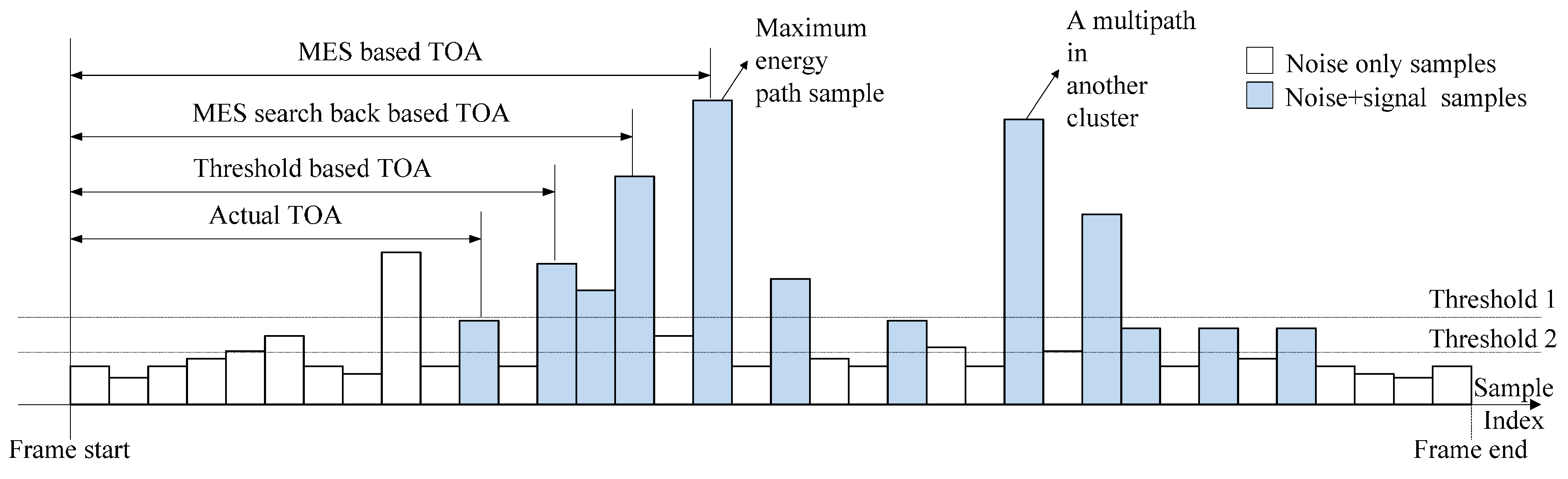
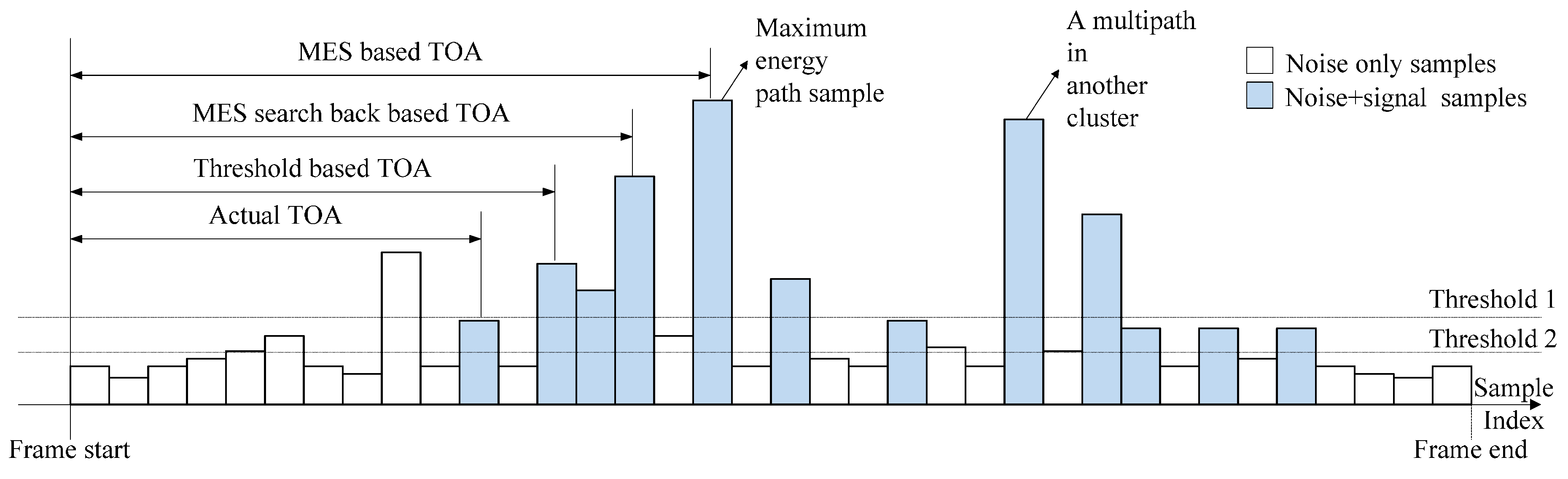
2.2. Ranging Error Analysis
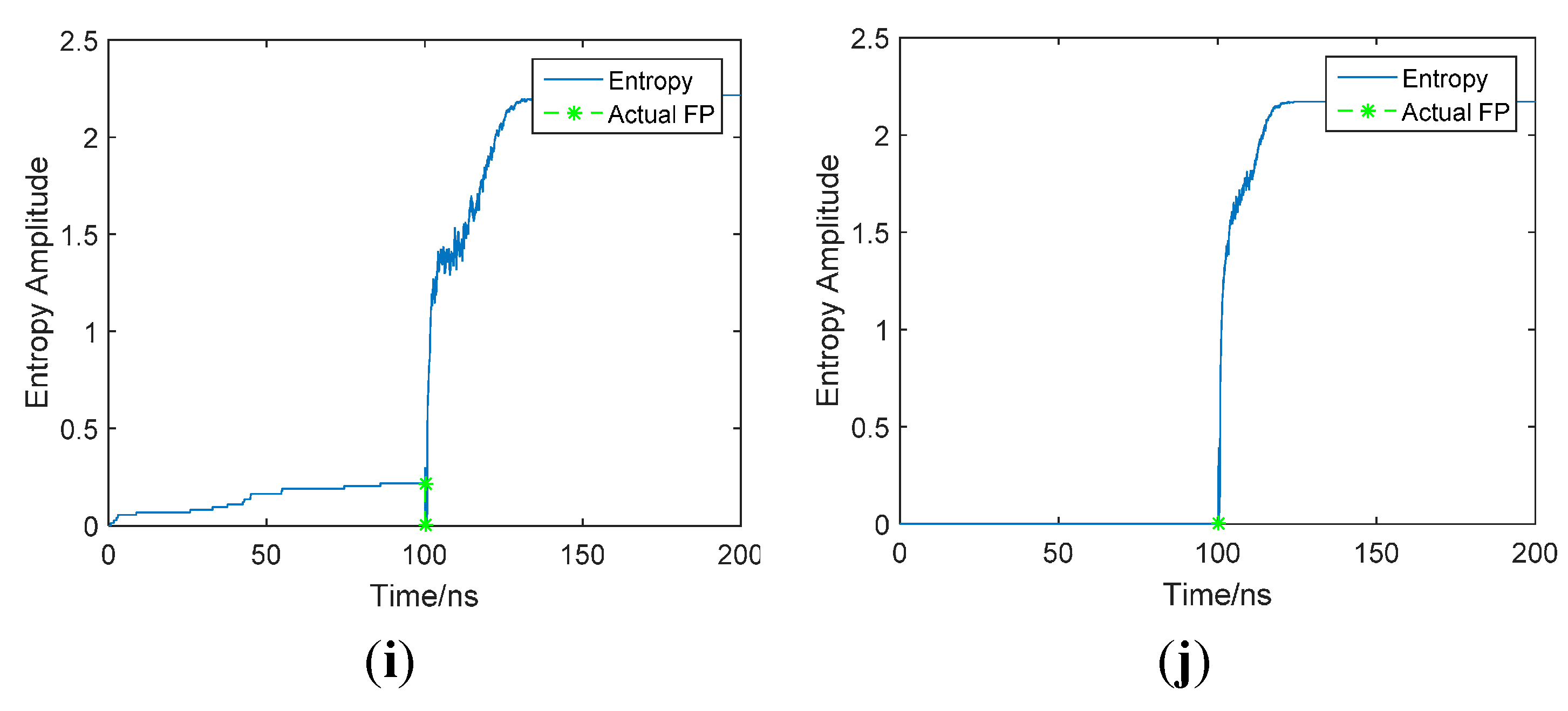
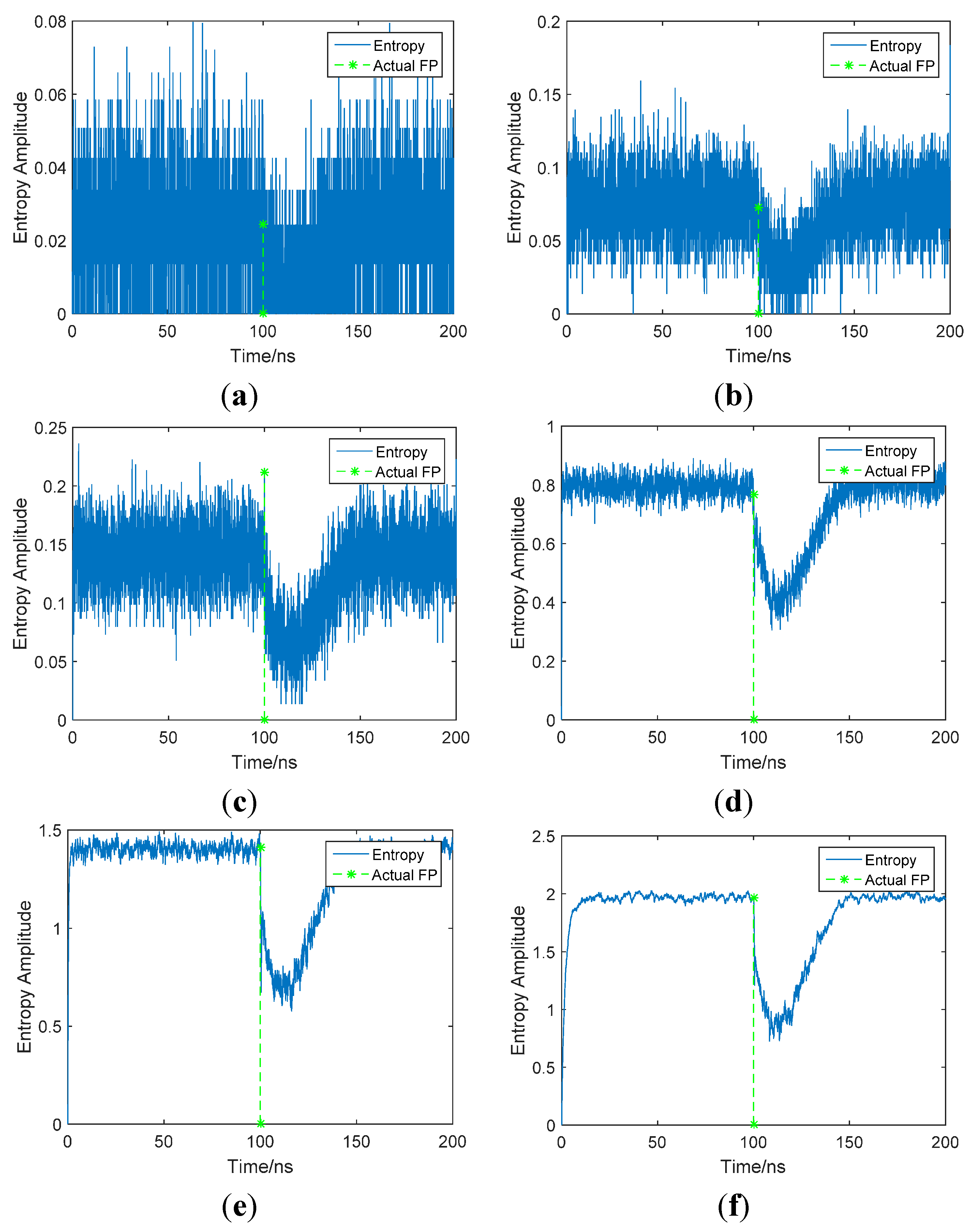
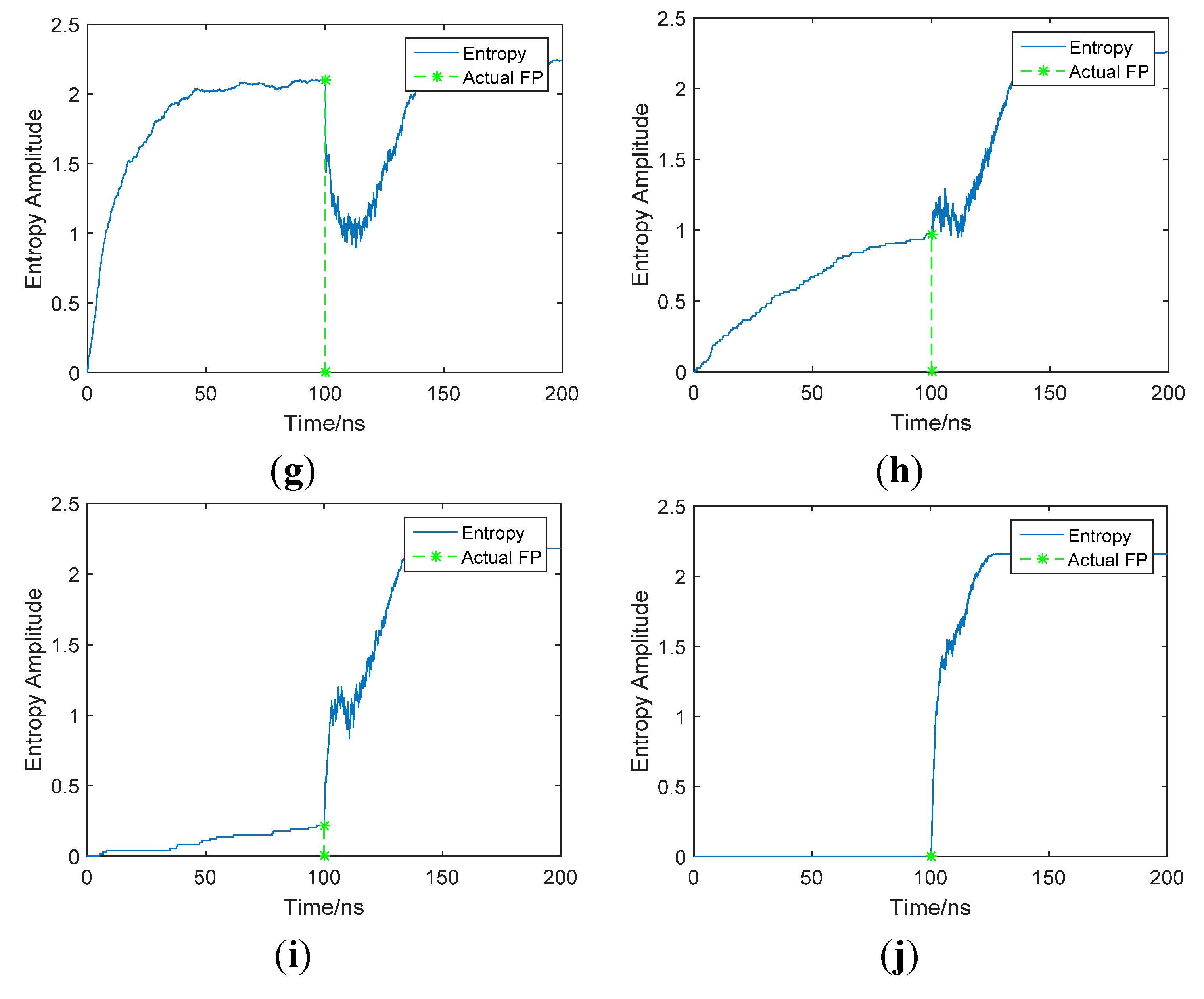
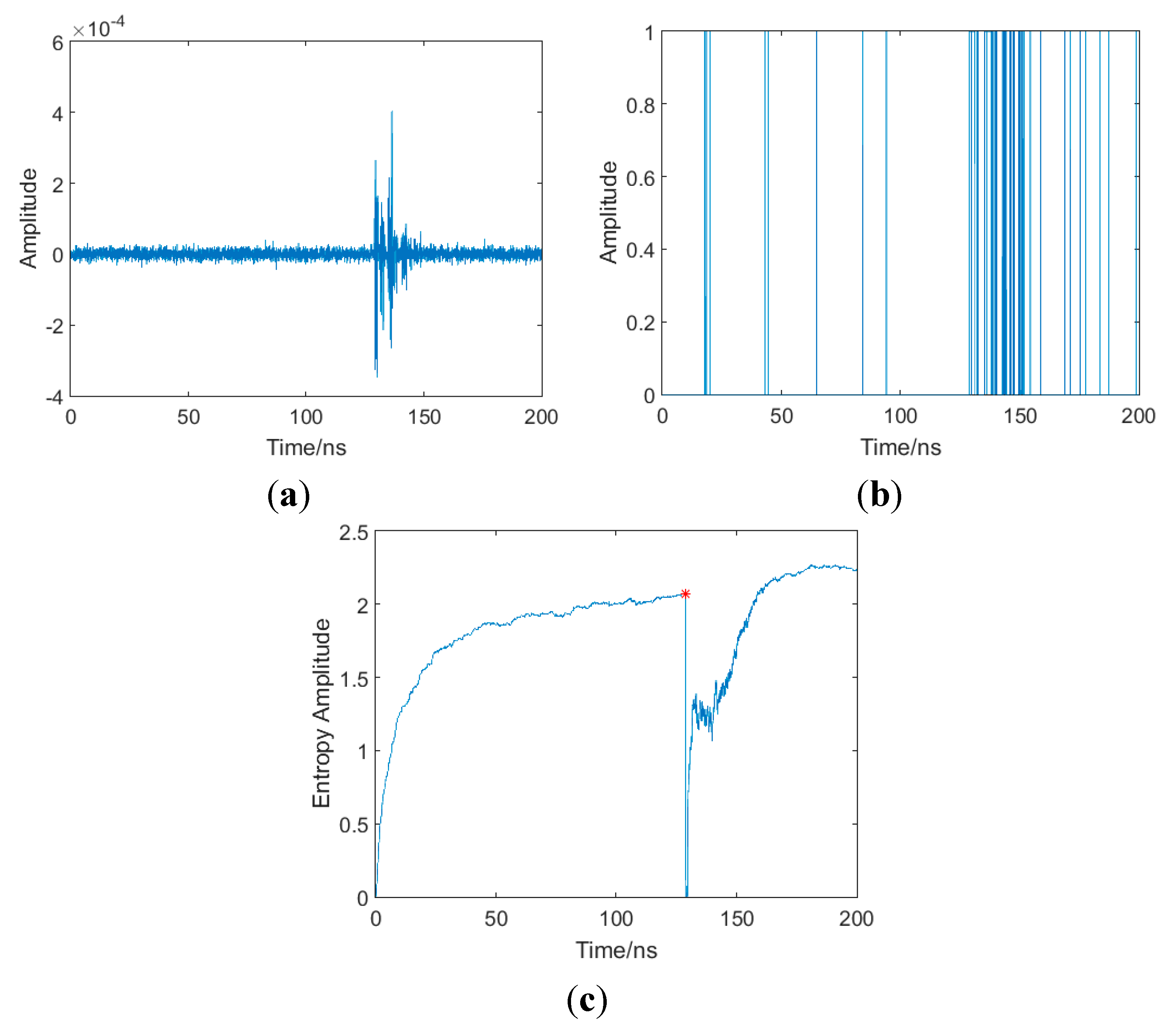
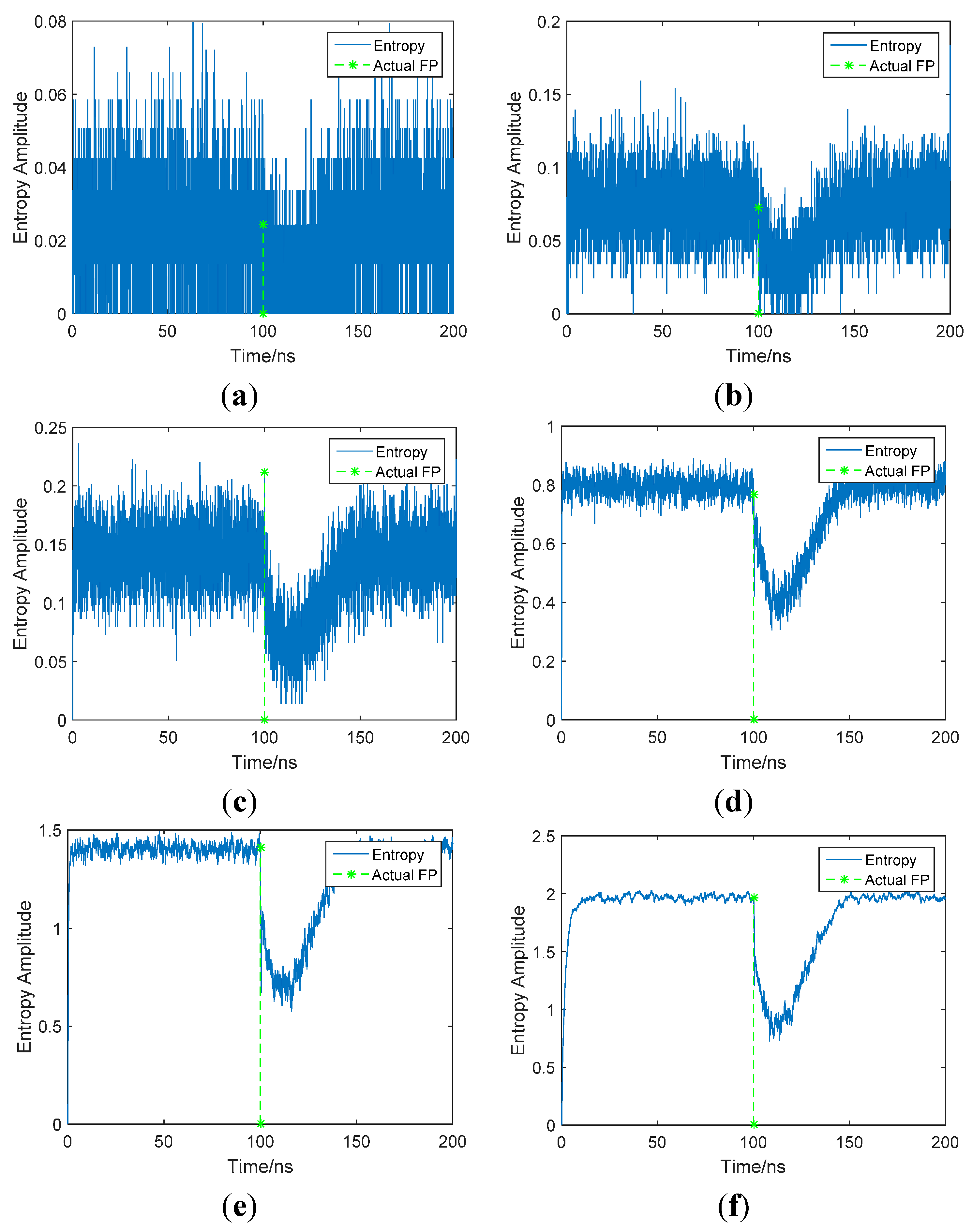
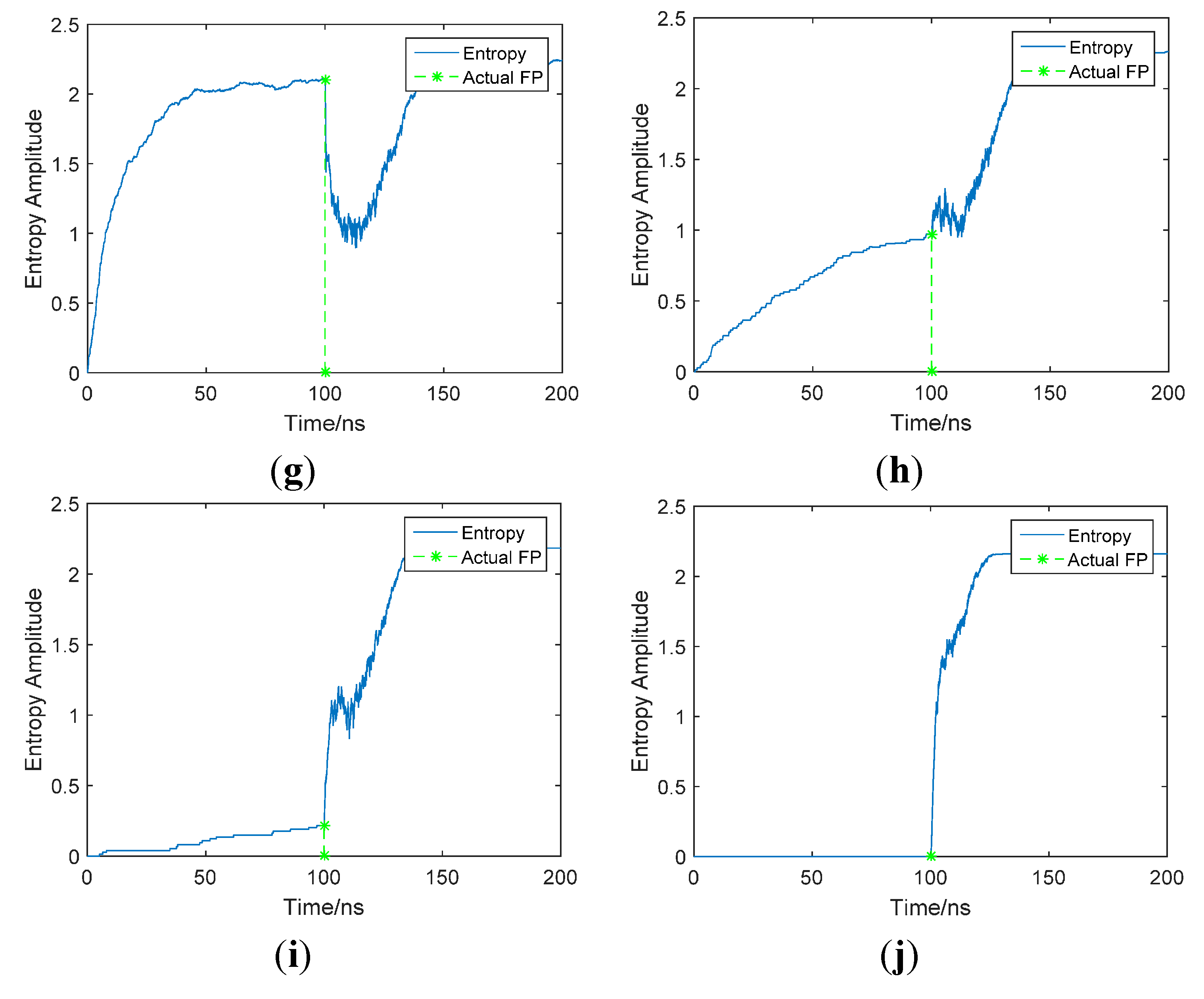
3. Entropy-Based TOA Estimation in UWB Ranging
3.1. The Theory of Entropy
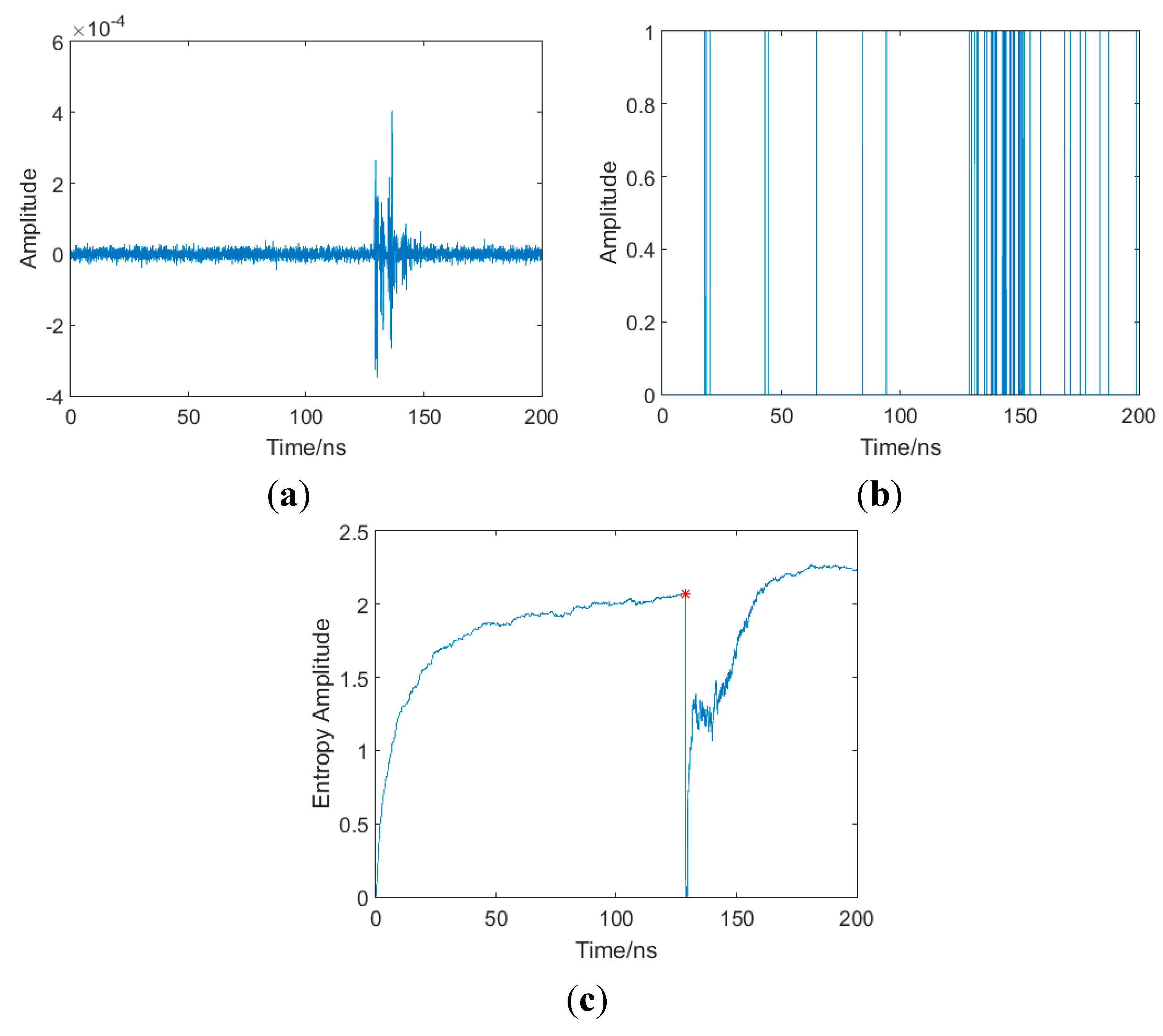
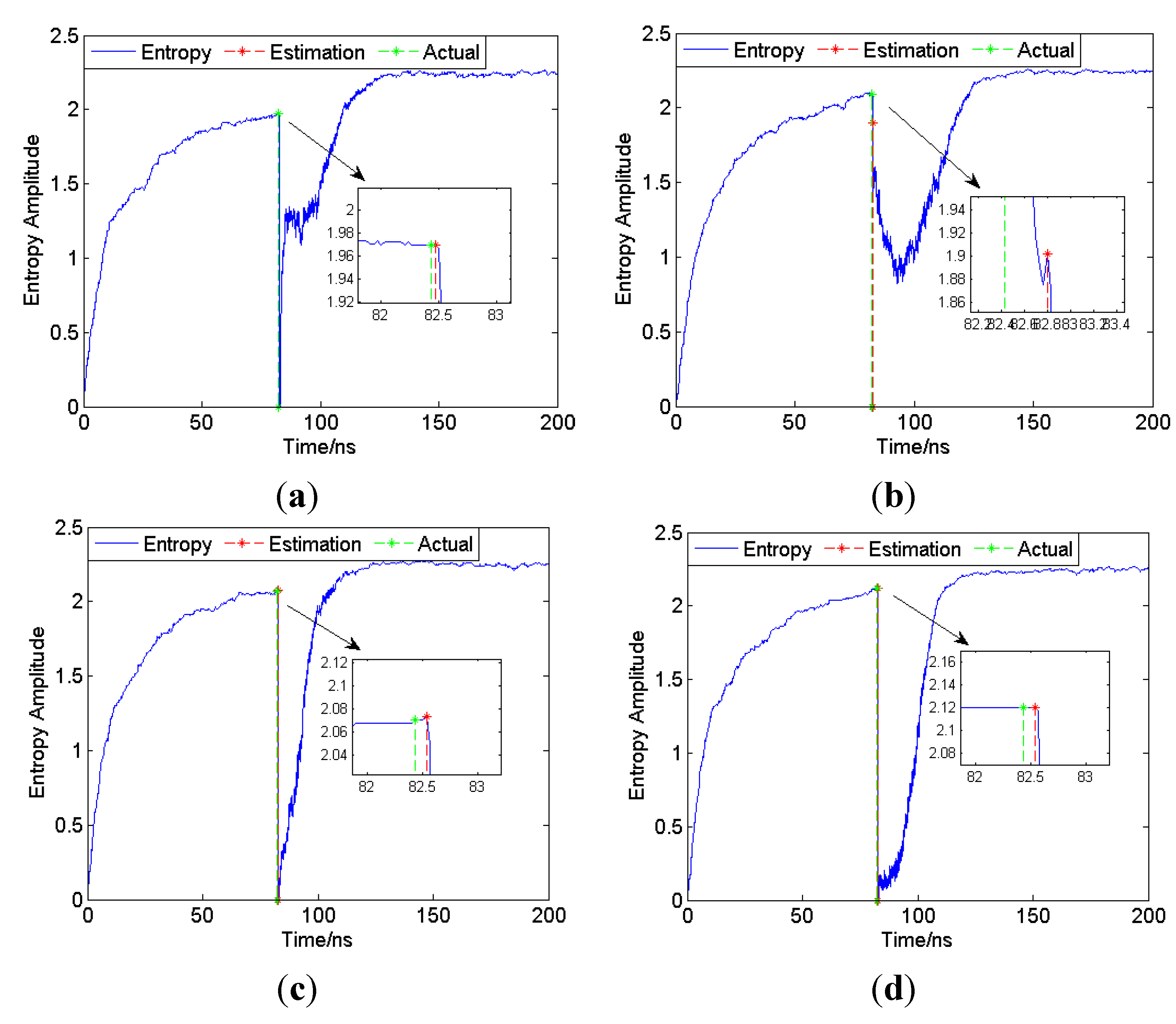
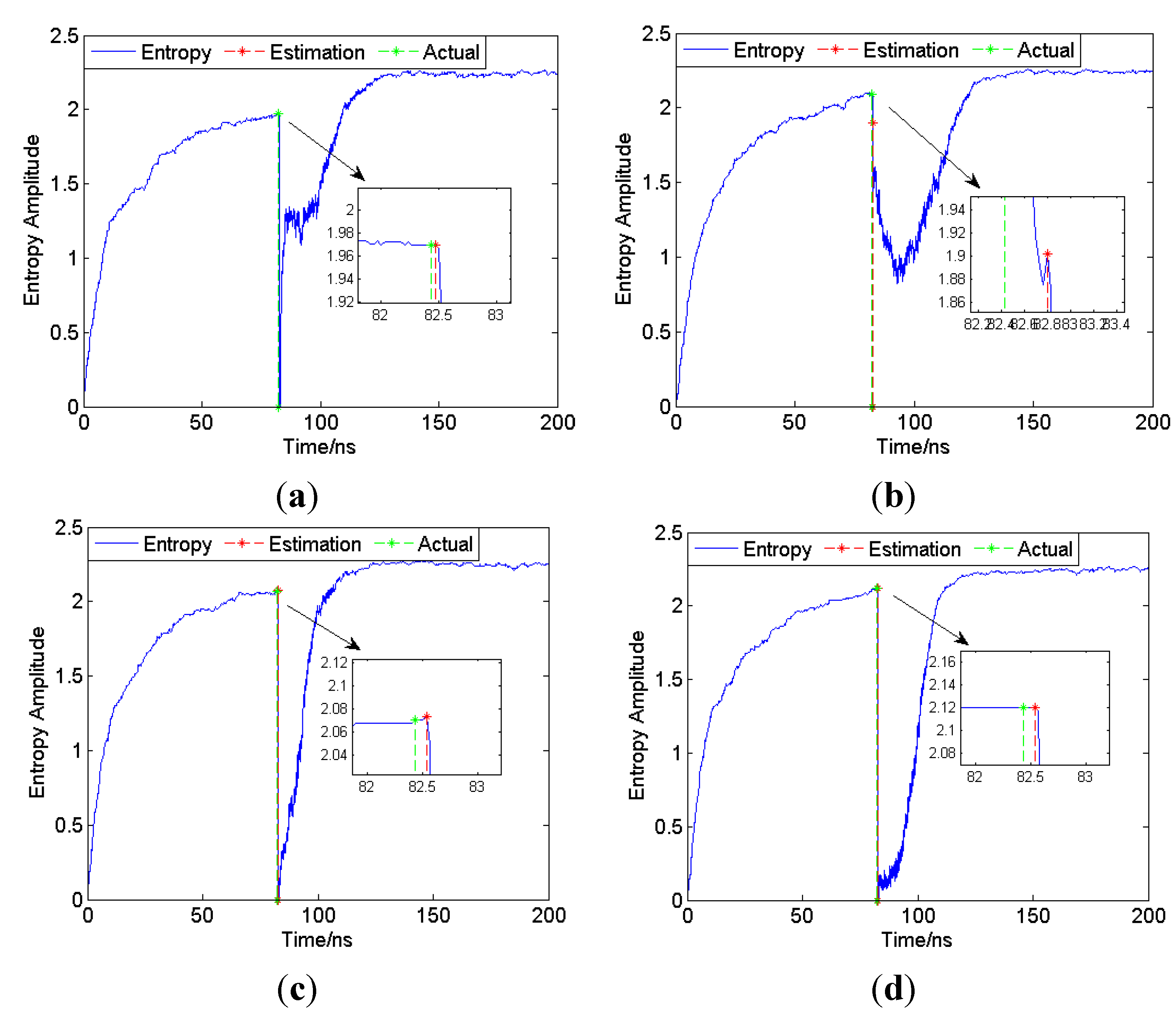
3.2. Proposed Entropy Based Method

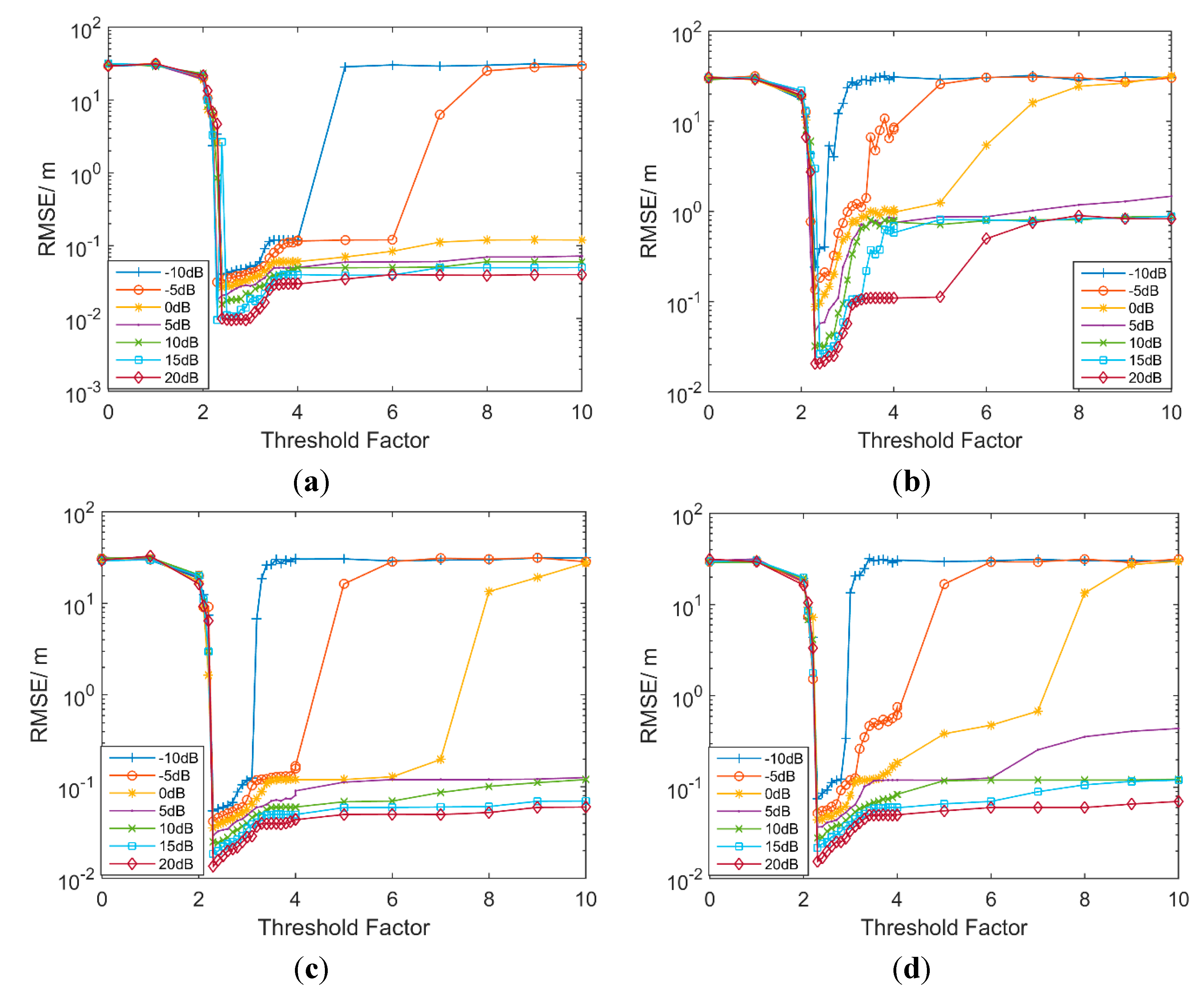
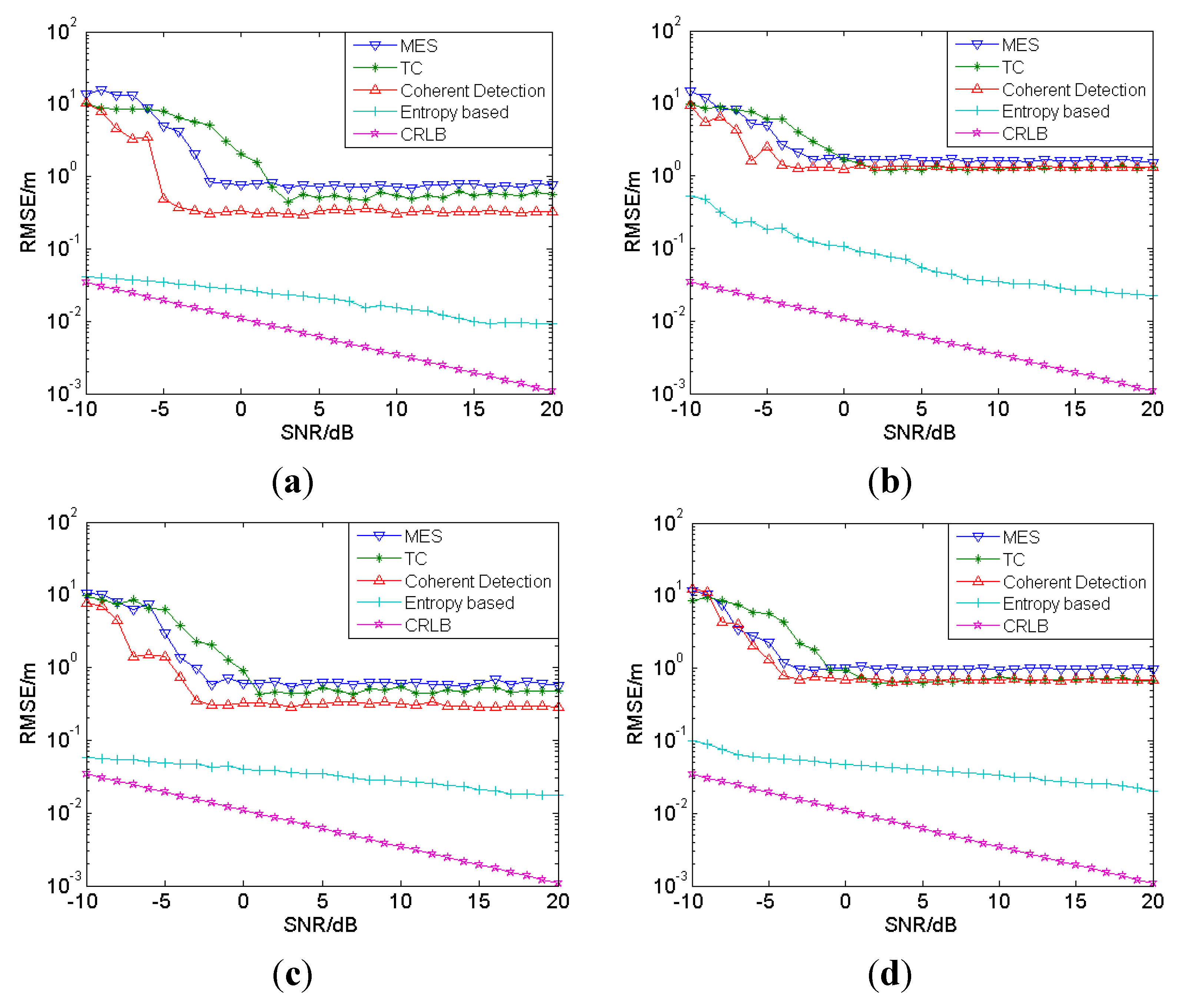
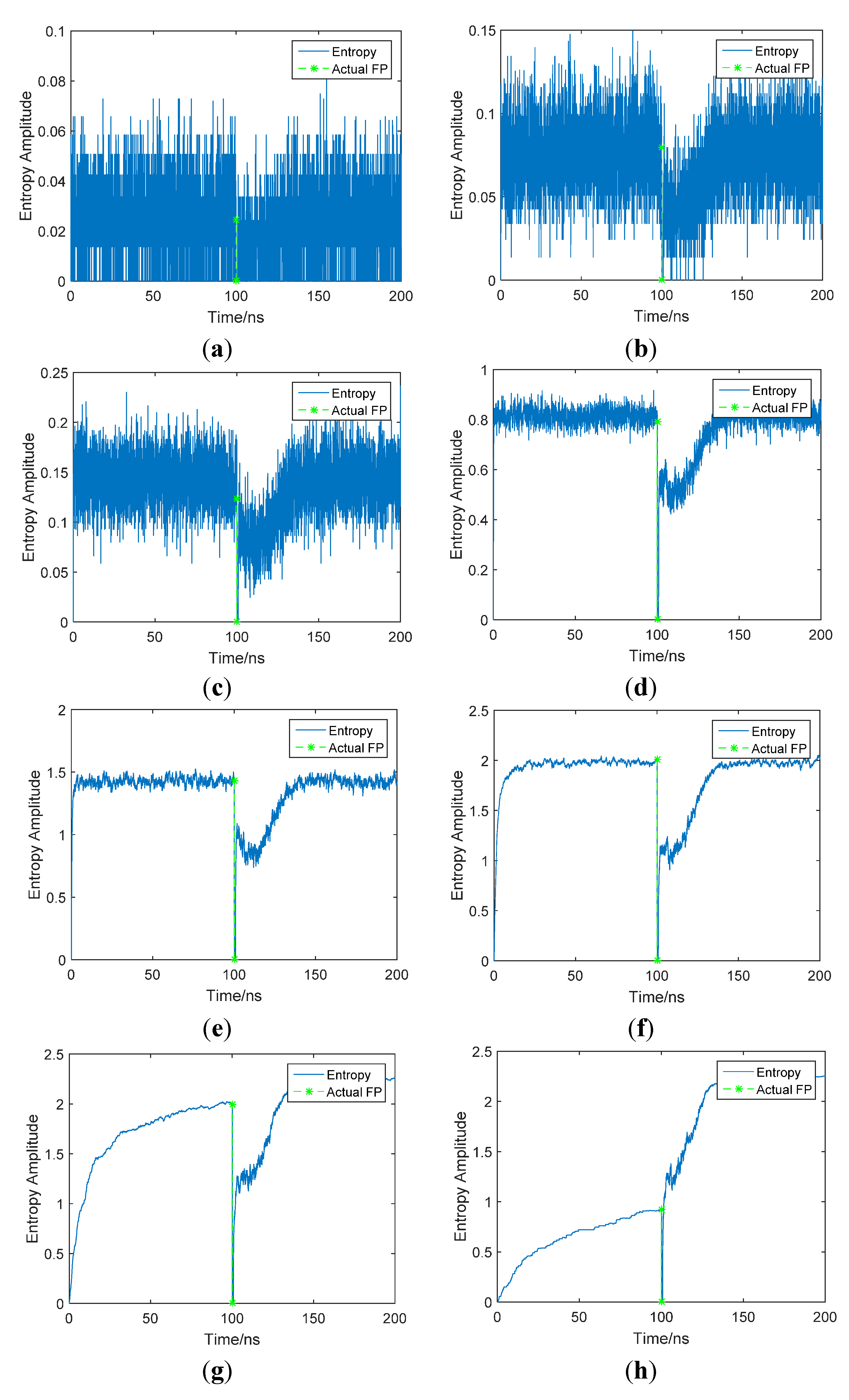
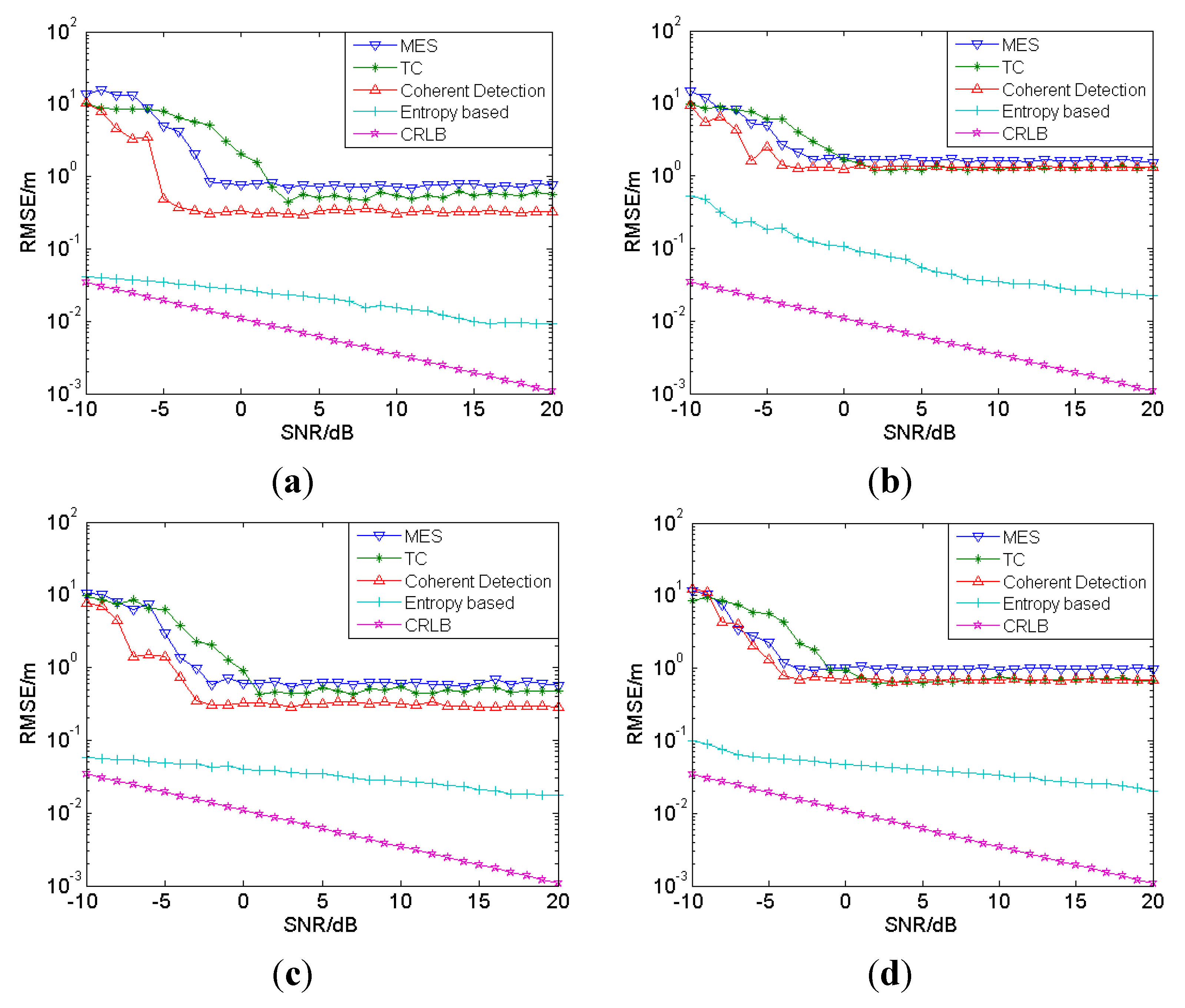
3.3. Ranging Performance and Discussion
4. SVM Regression-Based Ranging Error Mitigation
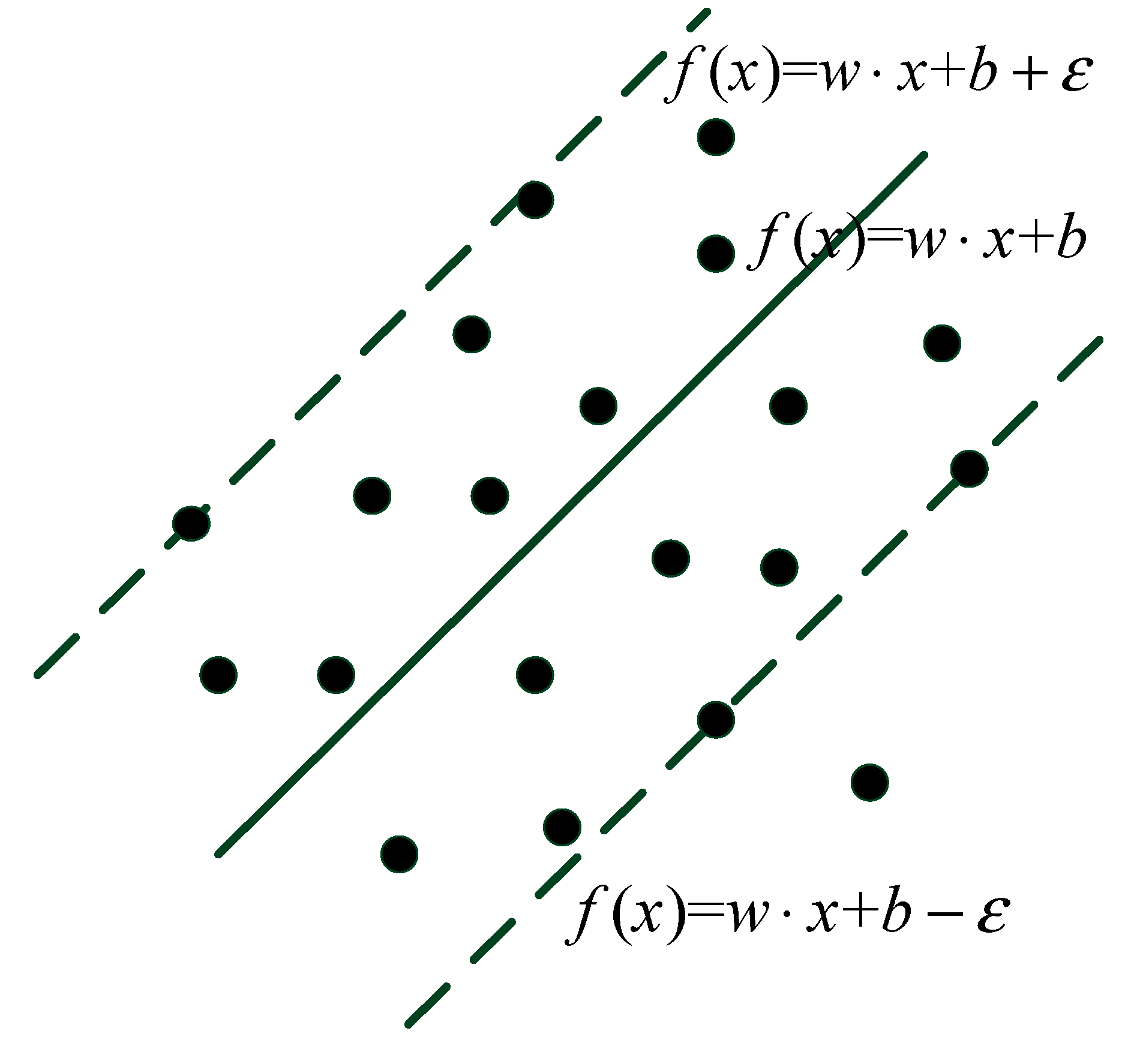
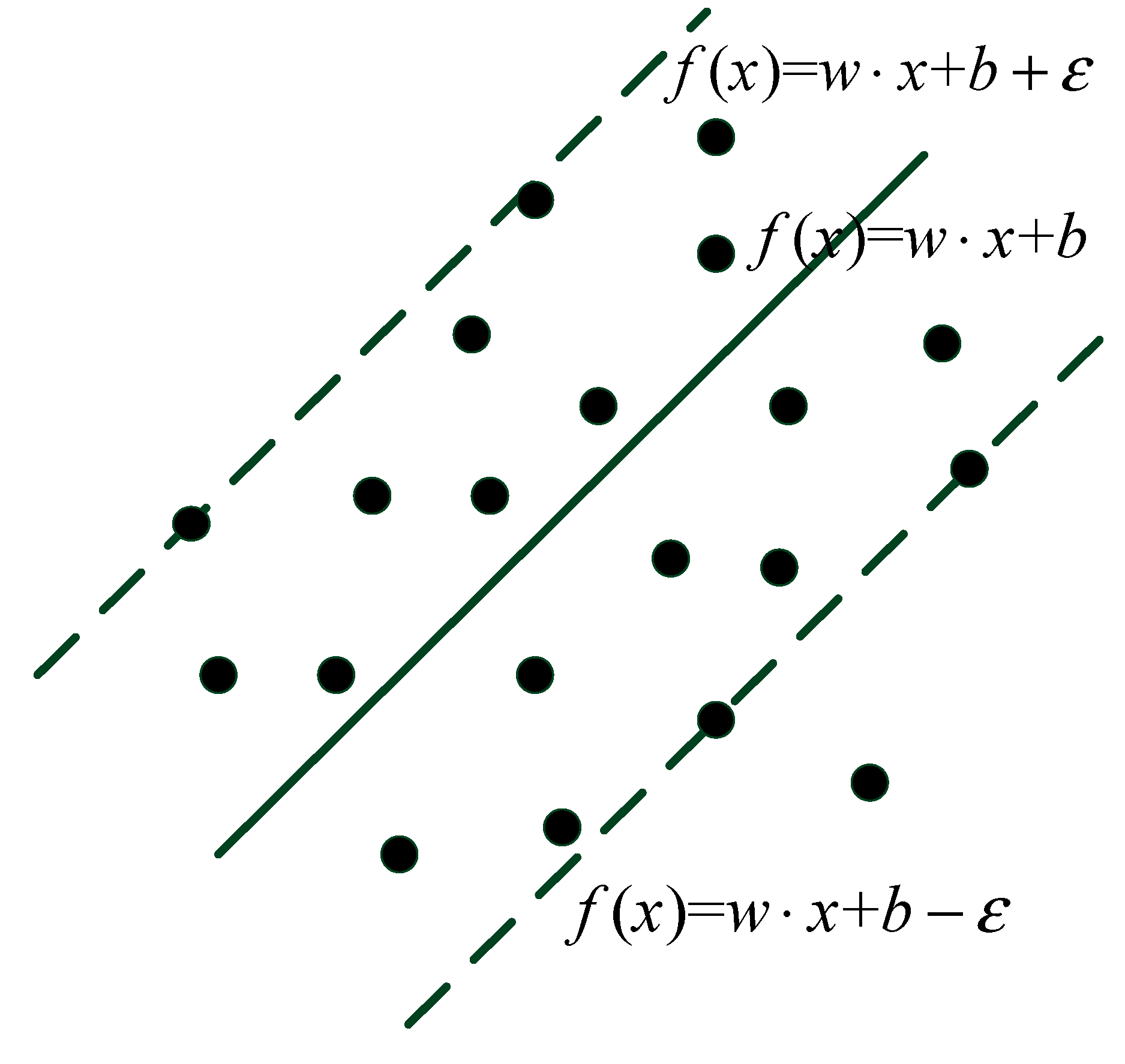
4.1. Regression with Support Vector Machines
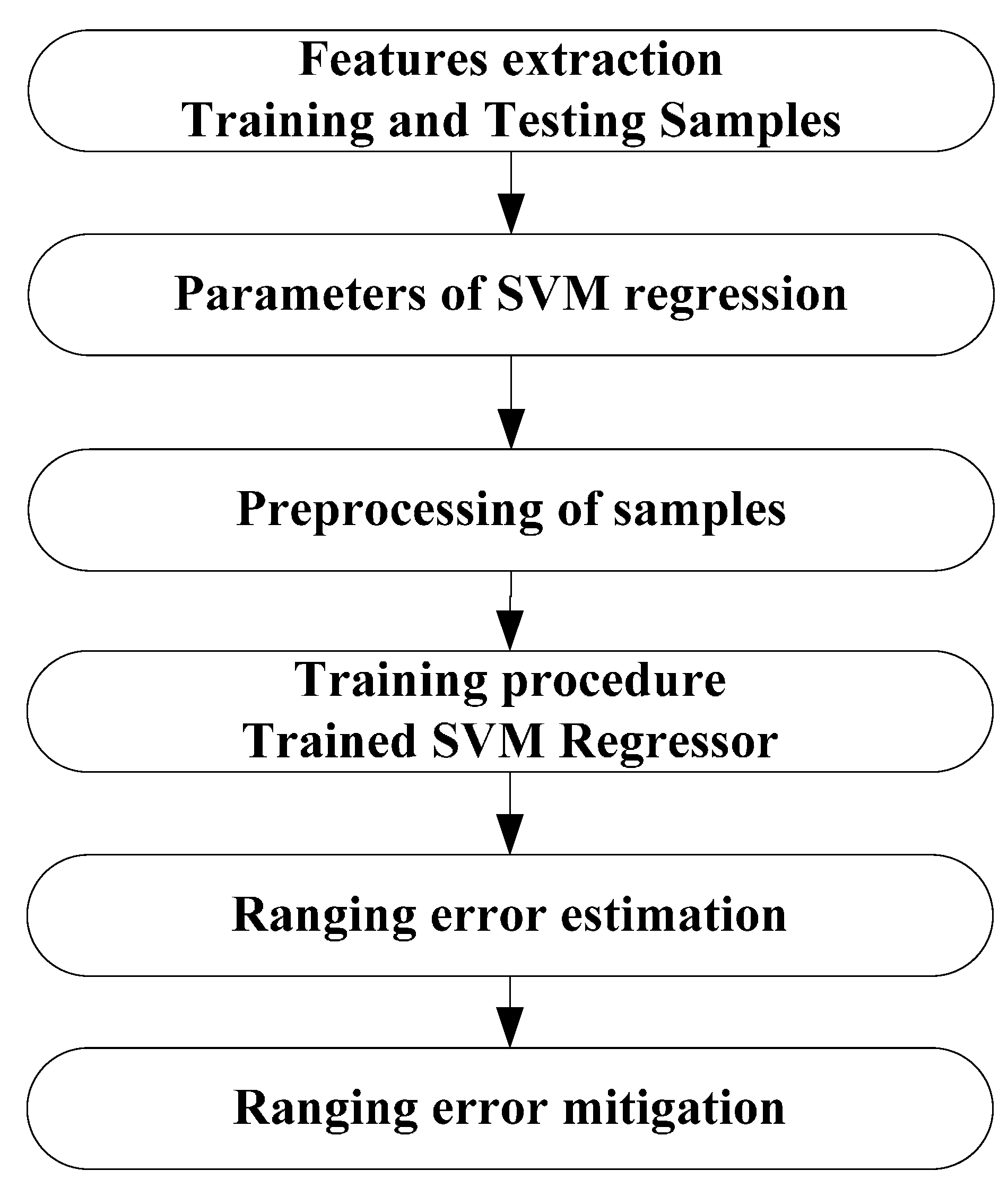
4.2. Feature Selection and Mitigation Procedure
| Name | Expression |
|---|---|
| Maximum Amplitude | |
| Energy | |
| Mean Excess Delay | |
| RMS Delay Spread | |
| Kurtosis | |
| Number of Significant Paths 1 (paths within X dB from the peak) | |
| Number of Significant Paths 2 (captures x% of energy in channel) | |
| Estimated Distance |
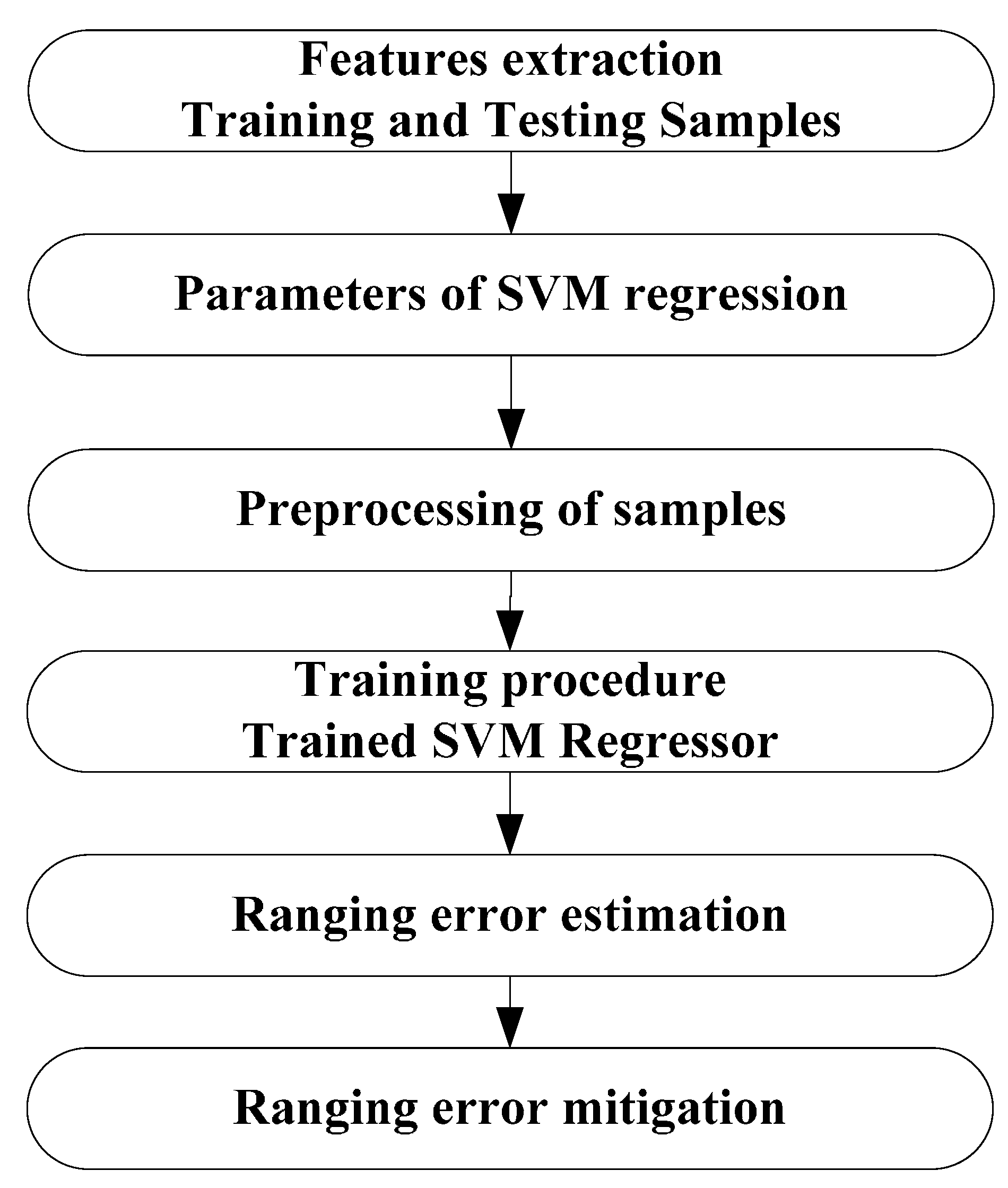
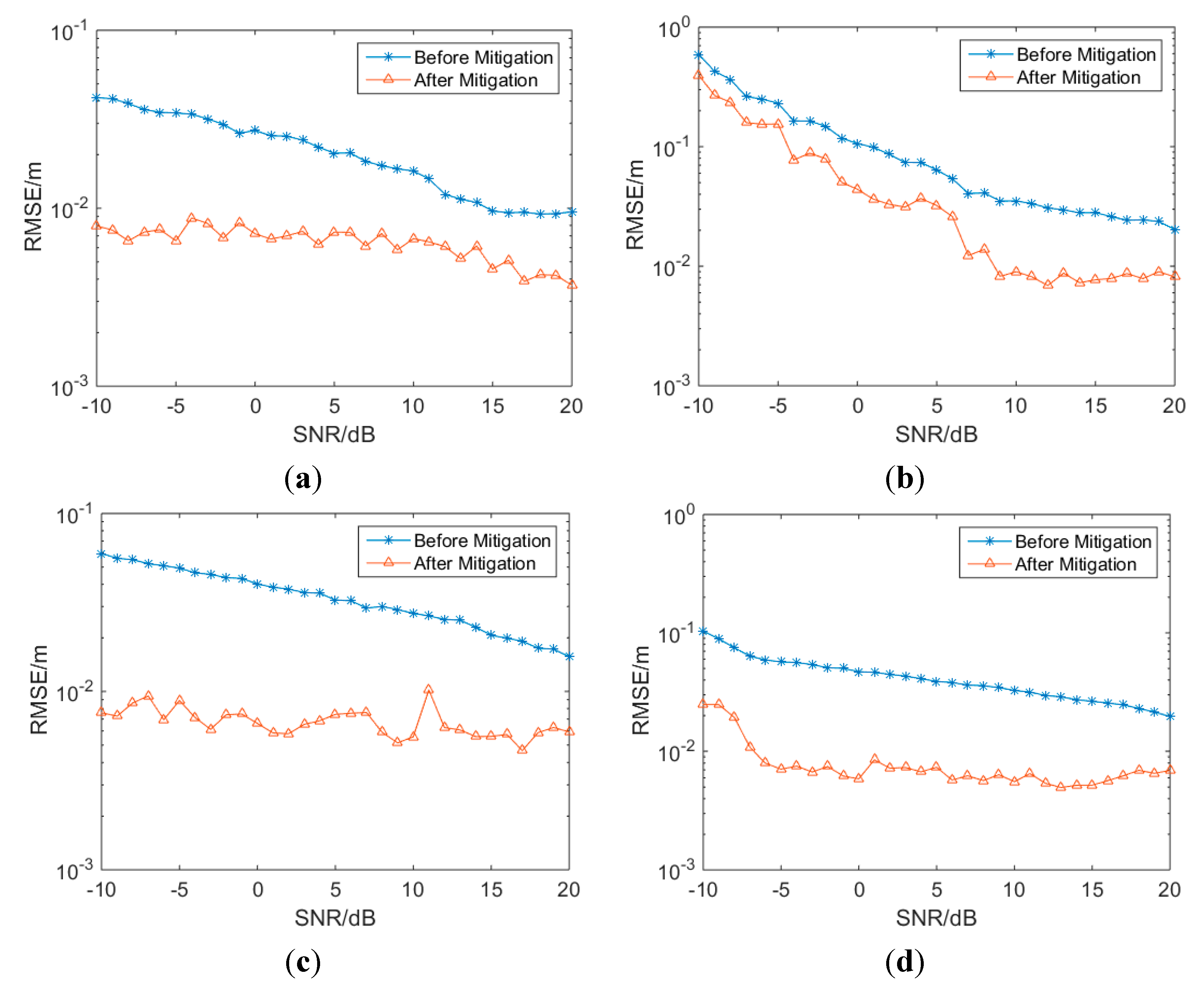
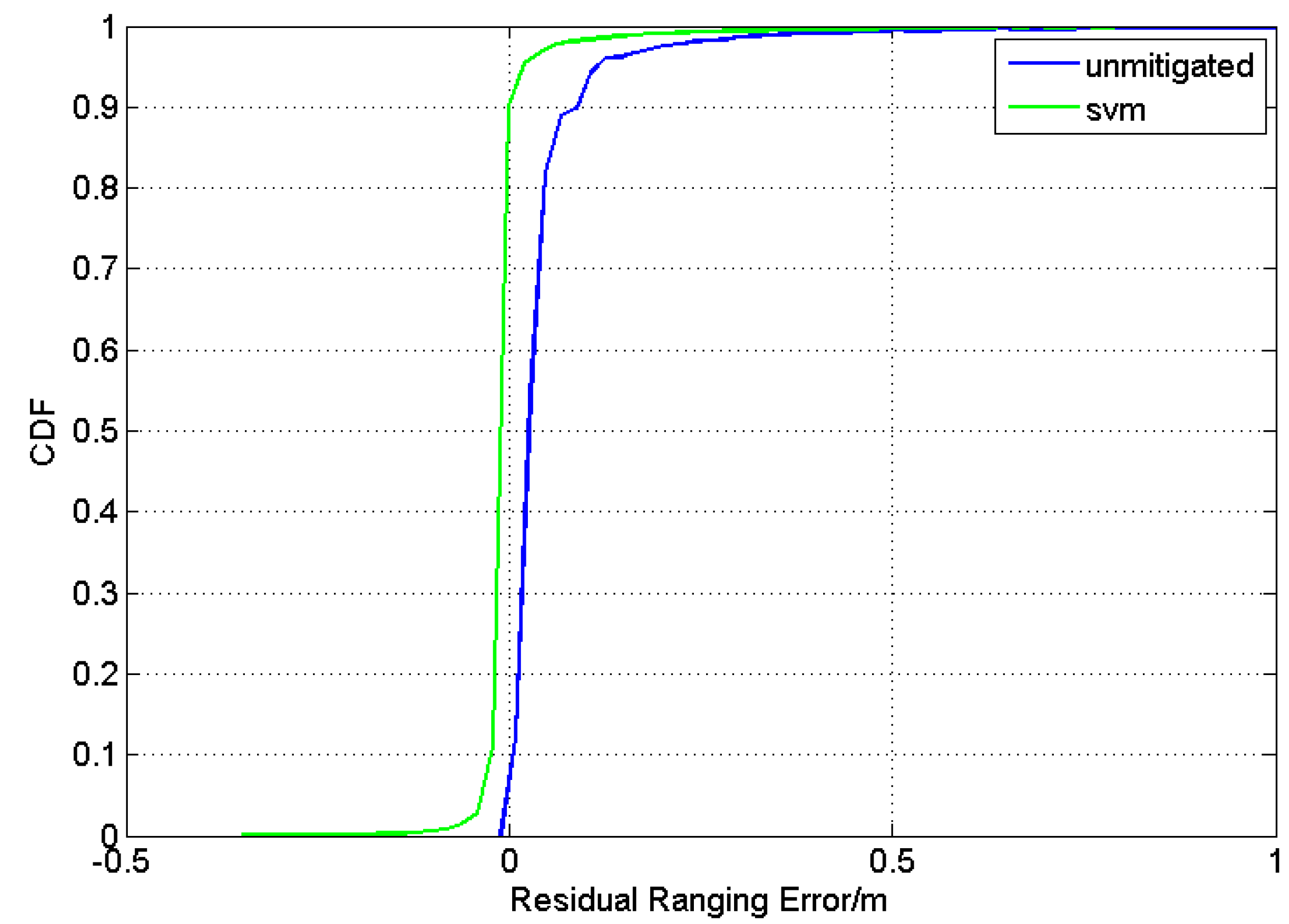
4.3. Mitigation Performance and Discussion


5. Conclusions
Acknowledgments
Author Contributions
Appendix
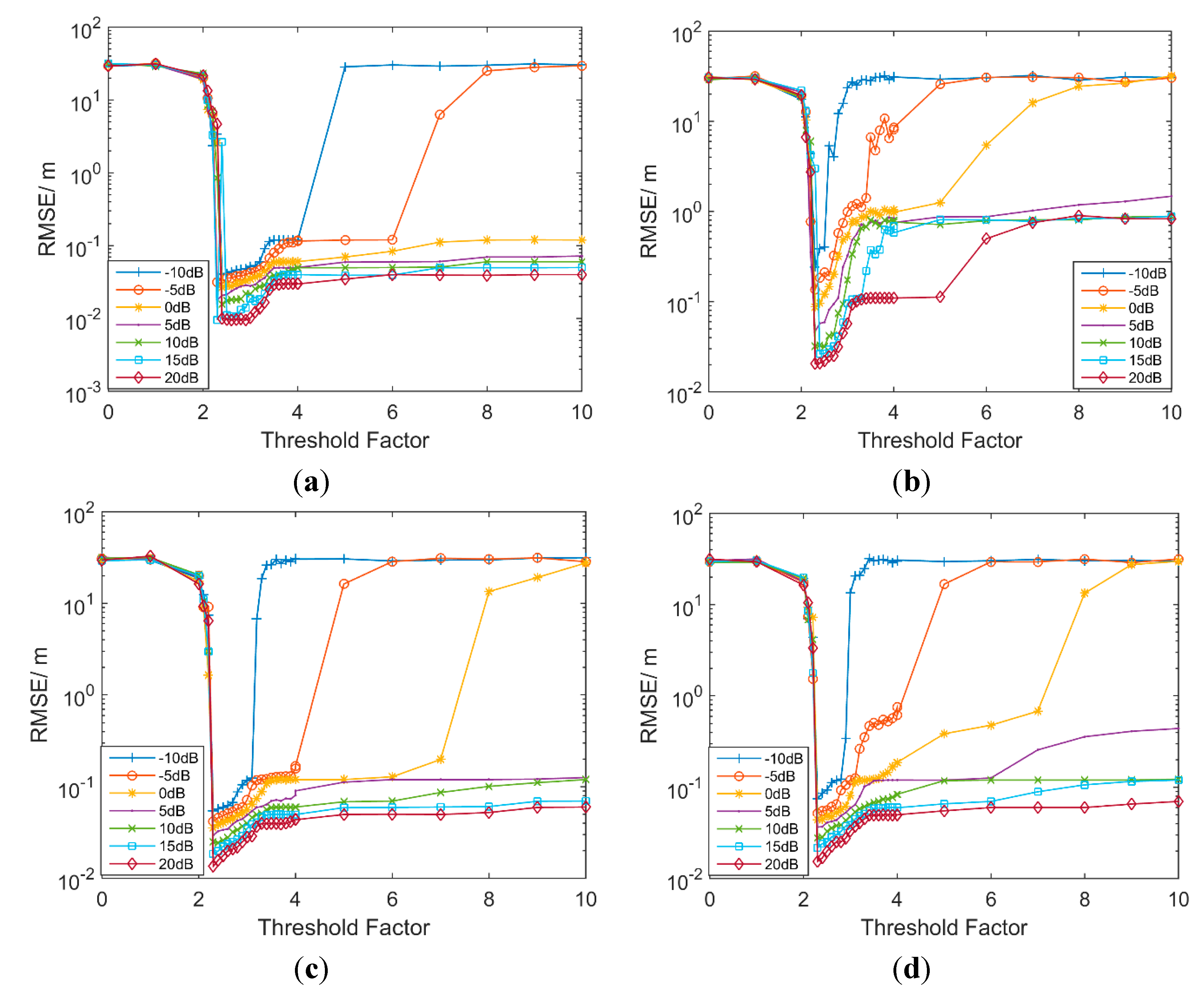
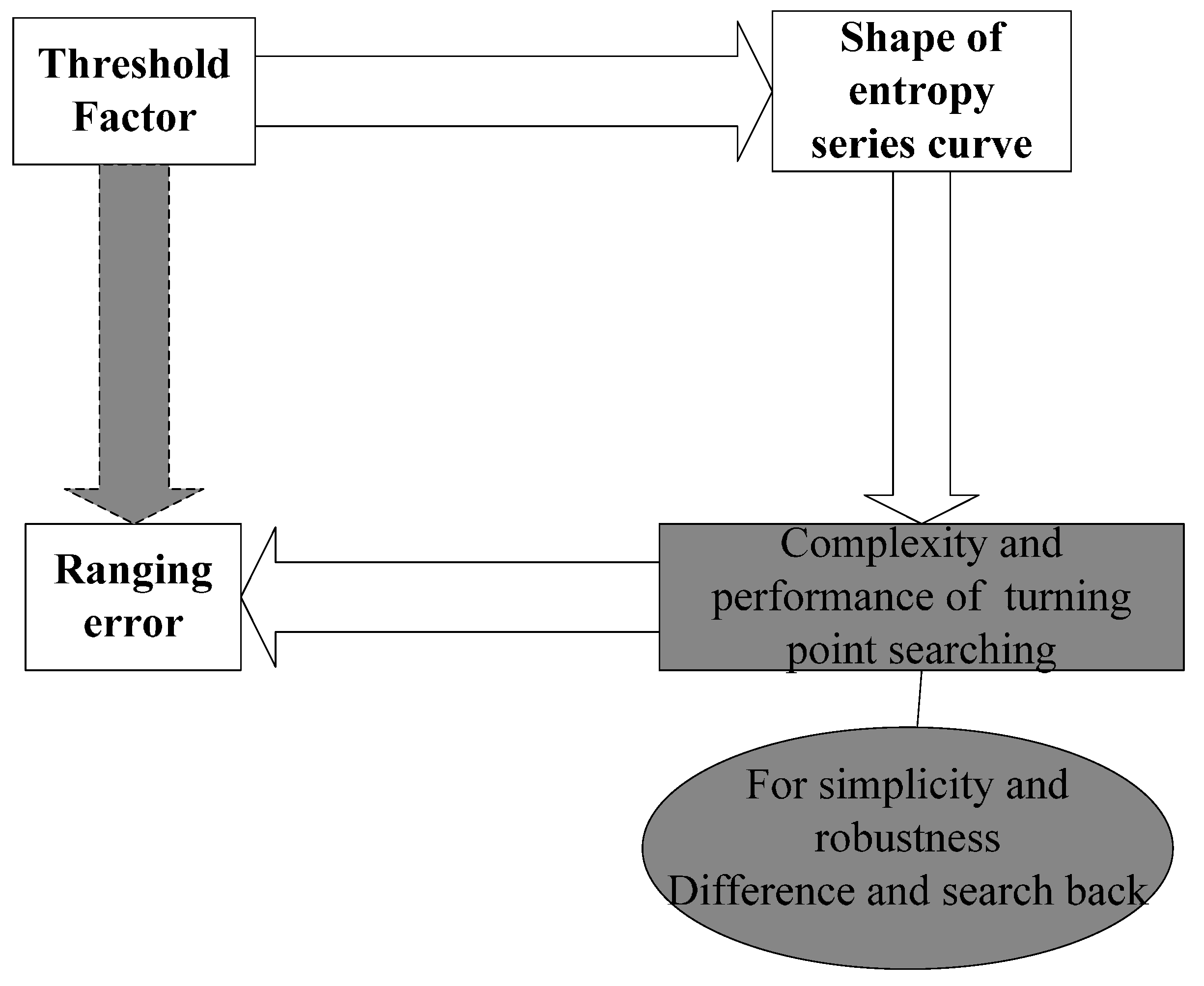
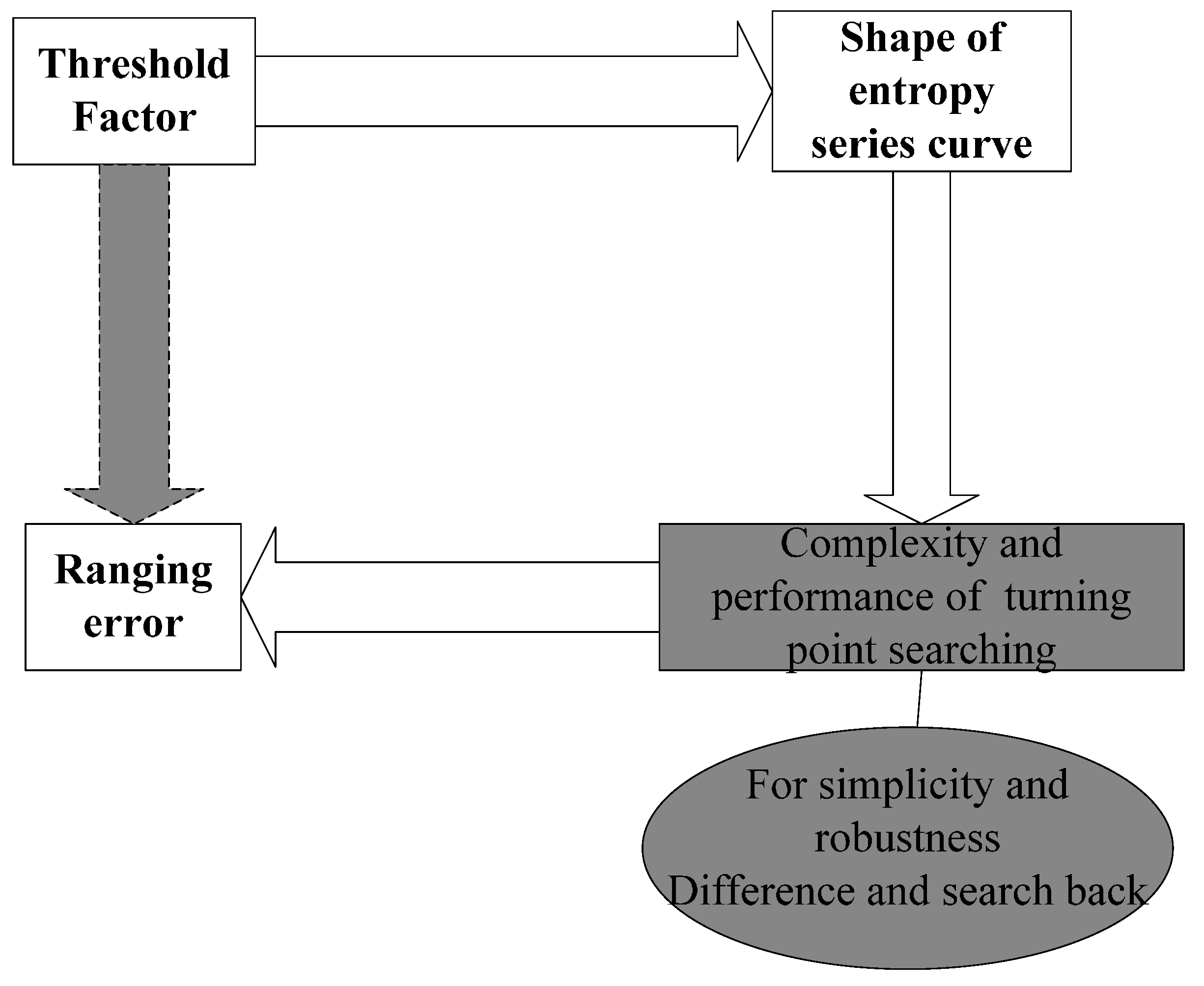
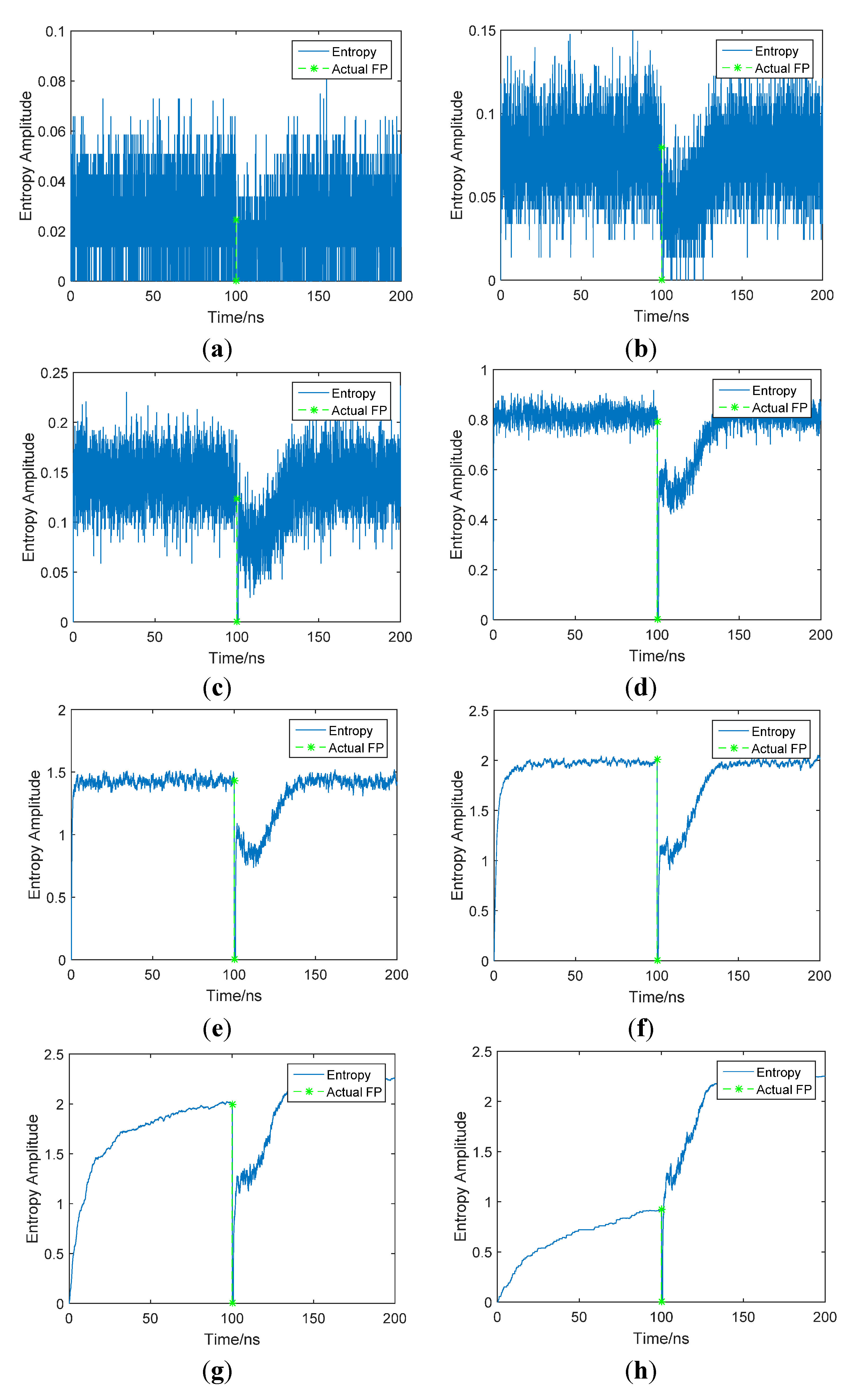
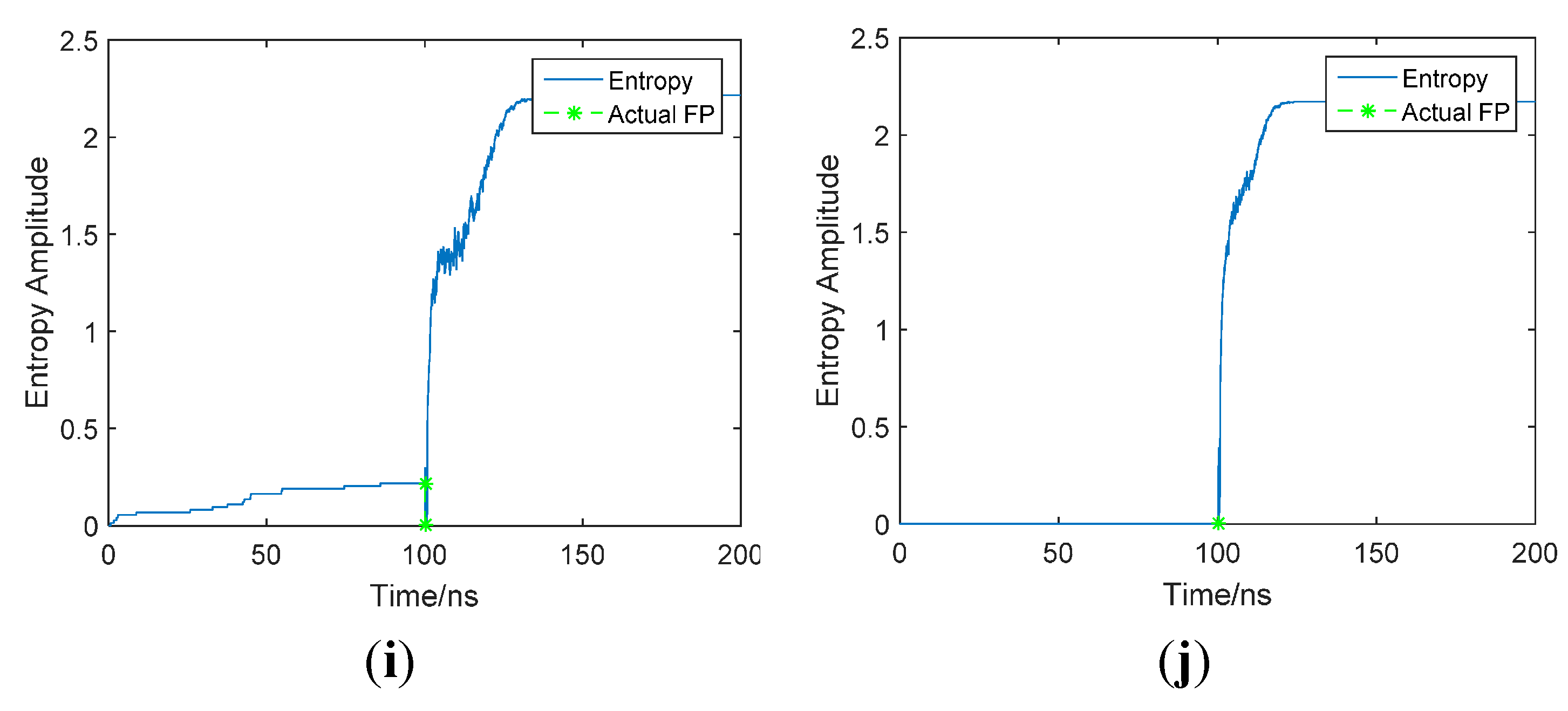
Further Discussion of Threshold Selection in Entropy-Based TOA Estimation
Conflicts of Interest
References
- Bartoletti, S.; Guerra, M.; Conti, A. UWB Passive Navigation in Indoor Environments. In Proceedings of the 4th International Symposium on Applied Sciences in Biomedical and Communication Technologies, Barcelona, Spain, 26–29 October 2011.
- Conti, A.; Guerra, M.; Dardari, D. Network Experimentation for Cooperative Localization. IEEE J. Sel. Areas Commun. 2012, 30, 467–475. [Google Scholar] [CrossRef]
- Zhou, Y.; Law, C.L.; Guan, Y.L. Indoor Elliptical Localization Based on Asynchronous UWB Range Measurement. IEEE Trans. Instrum. Meas. 2011, 60, 248–257. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. Impulse Radio: How It Works. IEEE Commun. Lett. 1998, 2, 36–38. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. Ultra-Wide Bandwidth Time-Hopping Spread-Spectrum Impulse Radio for Wireless Multiple-Access Communications. IEEE Trans. Commun. 2000, 48, 679–689. [Google Scholar] [CrossRef]
- Miller, L.E. Why UWB? A Review of Ultra-Wideband Technology; Technical Report for NETEX Project Office, DARPA by Wireless Communication Technologies Group National Institute of Standards and Technology: Gaithersburg, Maryland, April 2003.
- Jourdan, D.; Dardari, D.; Win, M.Z. Position Error Bound for UWB Localization in Dense Cluttered Environments. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 613–628. [Google Scholar] [CrossRef]
- Silva, B.; Pang, Z.; Akerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-Based High Precision Localization for Industrial Applications. In Proceedings of IEEE International Conference on Ultra-WideBand, Paris, France, 1–3 September 2014; pp. 280–285.
- Dardari, D.; Conti, A.; Ferner, U. Ranging with Ultrawide Bandwidth Signals in Multipath Environments. IEEE Proc. 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Li, J.; Zeng, Z.; Sun, J. Through-Wall Detection of Human Being’s Movement by UWB Radar. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1079–1083. [Google Scholar] [CrossRef]
- Alavi, B.; Pahlavan, K. Modeling of the TOA-Based Distance Measurement Error Using UWB Indoor Radio Measurements. IEEE Commun. Lett. 2006, 10, 275–277. [Google Scholar] [CrossRef]
- Guvenc, I.; Sahinoglu, Z. Threshold-Based TOA Estimation for Impulse Radio UWB Systems. In Proceedings of the IEEE International Conference on Ultra-WideBand, Zurich, Switzerland, 5–8 September 2005; pp. 420–425.
- Dardari, D.; Chong, C.C.; Win, M.Z. Threshold-Based Time-of-Arrival Estimators in UWB Dense Multipath Channels. IEEE Trans. Commun. 2008, 56, 1366–1378. [Google Scholar] [CrossRef]
- Fujiwara, R.; Mizugaki, K.; Nakagawa, T. TOA/TDOA Hybrid Relative Positioning System Based on UWB-IR Technology. IEICE Trans. Commun. 2011, 94, 1016–1024. [Google Scholar] [CrossRef]
- Liu, W.; Ding, H.; Huang, X. TOA Estimation in IR UWB Ranging with Energy Detection Receiver Using Received Signal Characteristics. IEEE Commun. Lett. 2012, 16, 738–741. [Google Scholar] [CrossRef]
- Ding, H.; Liu, W.; Huang, X. First Path Detection Using Rank Test in IR UWB Ranging with Energy Detection Receiver under Harsh Environments. IEEE Commun Lett. 2013, 17, 761–764. [Google Scholar] [CrossRef]
- Shang, F.; Champagne, B.; Psaromiligkos, I. Joint TOA/AOA estimation of IR-UWB Signals in the Presence of Multiuser Interference. In Proceedings of the IEEE 15th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Toronto, ON, Canada, 22–25 June 2014; pp. 504–508.
- Shi, W.; Annavajjala, R.; Orlik, P.V.; Molisch, A.F.; Ochiai, M.; Taira, A. Non-coherent TOA Estimation for UWB Multipath Channels Using Max-Eigenvalue Detection. In Proceedings of the IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 4509–4514.
- Jiang, X.; Zhang, H. Non-Line of Sight Error Mitigation in UWB Ranging Systems Using Information Fusion. In Electronics and Signal Processing; Springer: Berlin, Germany, 2011; pp. 969–976. [Google Scholar]
- Guvenc, I.; Sahinoglu, Z. Threshold Selection for UWB TOA Estimation Based on Kurtosis Analysis. IEEE Commun. Lett. 2005, 9, 1025–1027. [Google Scholar] [CrossRef]
- Liu, W.; Huang, X.; Jin, T.; Zhou, Z.; Li, X. Entropy Based TOA Estimation in IR UWB Ranging with Energy Detection Receiver under Dense Multipath Environment. In Proceedings of the IEEE International Conference on Ultra-WideBand, Sydney, Australia, 15–18 September 2013; pp. 31–36.
- Djeddou, M.; Zeher, H.; Nekachtali, Y. Yet Another TOA Estimation Technique for IR-UWB. Compel Int. J. Comp. Math. Electr. Electron. Eng. 2014, 33, 286–297. [Google Scholar]
- Giorgetti, A.; Chiani, M. Time-of-Arrival Estimation Based on Information Theoretic Criteria. IEEE Trans Signal Process. 2013, 61, 1869–1879. [Google Scholar] [CrossRef]
- Ghasemlou, M.; Nader-Esfahani, S.; Tabataba-Vakili, V. An Improved Method for TOA Estimation in TH-UWB System Considering Multipath Effects and Interference. J. Inf. Syst. Telecommun. 2014, 2, 23–29. [Google Scholar]
- Bartoletti, S.; Dai, W.; Conti, A.; Win, M.Z. A Mathematical Model for Wideband Ranging. IEEE J. Sel. Top. Signal Process. 2015, 9, 216–228. [Google Scholar] [CrossRef]
- Dashti, M.; Ghoraishi, M.; Haneda, K. Optimum Threshold for Indoor UWB ToA-Based Ranging. IEICE Trans. Fundam. Electron. Commun. Comp. Sci. 2011, 94, 2002–2012. [Google Scholar] [CrossRef]
- Wang, X.; Yin, B.; Lu, Y.; Xu, B.; Du, P.; Xiao, L. Iterative Threshold Selection for TOA Estimation of IR-UWB System. In Proceedings of the 2013 IEEE and Internet of Things (iThings/CPSCom)on Green Computing and Communications (GreenCom), IEEE International Conference on and IEEE Cyber, Physical and Social Computing, Beijing, China, 20–23 August 2013; pp. 1763–1766.
- Khodjaev, J.; Park, Y.; Malik, A.S. Survey of NLOS Identification and Error Mitigation Problems in UWB-Based Positioning Algorithms for Dense Environments. Ann. Telecommun. 2010, 65, 301–311. [Google Scholar] [CrossRef]
- Borras, J.; Hatrack, P.; Mandayam, N.B. Decision Theoretic Framework for NLOS Identification. In Proceedings of the 48th IEEE Vehicular Technology Conference, Ottawa, ON, Canada, 19–21 May 1998; pp. 1583–1587.
- Xiong, Z.; Sottile, F.; Garello, R.; Pastone, C. A Cooperative NLoS Identification and Positioning Approach in Wireless Networks. In Proceedings of the IEEE International Conference on Ultra-Wide Band, Paris, France, 1–3 September 2014; pp. 19–24.
- Yan, J.; Tiberius, C.C.; Bellusci, G.; Janssen, G.J. Non-Line-of-Sight Identification for Indoor Positioning Using Ultra-WideBand Radio Signals. Navigation 2013, 60, 97–111. [Google Scholar] [CrossRef]
- Wymeersch, H.; Maranò, S.; Gifford, W.M. A Machine Learning Approach to Ranging Error Mitigation for UWB Localization. IEEE Trans. Commun. 2012, 60, 1719–1728. [Google Scholar] [CrossRef]
- Bartoletti, S.; Giorgetti, A.; Win, M.Z.; Conti, A. Blind Selection of Representative Observations for Sensor Radar Networks. IEEE Trans. Veh. Technol. 2015, 64, 1388–1400. [Google Scholar] [CrossRef]
- Gentile, C.; Alsindi, N.; Raulefs, R.; Teolis, C. Multipath and NLOS Mitigation Algorithms. In Geolocation Techniques; Springer: New York, NY, USA, 2013; pp. 59–97. [Google Scholar]
- Yousefi, S.; Chang, X.W.; Champagne, B. Distributed Cooperative Localization in Wireless Sensor Networks without NLOS Identification. In Proceedings of the 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014; pp. 1–6.
- Montorsi, F.; Pancaldi, F.; Vitetta, G.M. Statistical Characterization and Mitigation of NLOS Errors in UWB Localization Systems. In Proceedings of the IEEE International Conference on Ultra-WideBand, Bologna, Italy, 14–16 September 2011; pp. 86–90.
- Yu, K.; Dutkiewicz, E. NLOS Identification and Mitigation for Mobile Tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1438–1452. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Z.; Cui, K.; Wu, Z.; Yin, L. Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems. Sensors 2015, 15, 11701-11724. https://doi.org/10.3390/s150511701
Yin Z, Cui K, Wu Z, Yin L. Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems. Sensors. 2015; 15(5):11701-11724. https://doi.org/10.3390/s150511701
Chicago/Turabian StyleYin, Zhendong, Kai Cui, Zhilu Wu, and Liang Yin. 2015. "Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems" Sensors 15, no. 5: 11701-11724. https://doi.org/10.3390/s150511701
APA StyleYin, Z., Cui, K., Wu, Z., & Yin, L. (2015). Entropy-Based TOA Estimation and SVM-Based Ranging Error Mitigation in UWB Ranging Systems. Sensors, 15(5), 11701-11724. https://doi.org/10.3390/s150511701